
FPGA-Based Implementation and Synchronization Design of a New Five-Dimensional Hyperchaotic System

Abstract
:1. Introduction
2. New 5-Dimensional Hyperchaotic System and Its Dynamical Properties
2.1. Theory of Hyperchaotic System
2.2. Dynamical Properties Analysis
2.2.1. Dissipativity
2.2.2. Lyapunov Exponents and Bifurcation Diagram
2.2.3. Randomness and Initial Value Sensitivity
2.2.4. Permutation Entropy
- (a)
- There exists a time series of length N , embedding dimension m with time delay t for phase space reconstruction.
- (b)
- The reconstructed subsequence can be expressed as , where , and the reconstructed matrix Y is obtained, which can be expressed as:where , each row of the matrix Y is a reconstructed component, and there are i reconstructed components. By reordering each reconstructed component in ascending order, the column indices of the positions of the elements in the vector are obtained to form a set of symbolic sequences , and , thus are mapped to .
- (c)
- Calculating the number of occurrences of each symbol sequence divided by the total number of occurrences of m! different symbol sequences as the probability of the occurrence of that symbol sequence, it can be expressed as .
- (d)
- The entropy of the permutation of the time series can be expressed as:
- (e)
- where , that is, each symbol has an equal probability, at this point the complexity of the time series is the highest, the permutation entropy is the largest, the permutation entropy is , and for the convenience of representation, is normalized and expressed as follows:
3. FPGA-Based Hyperchaotic Synchronization Design
3.1. Hyperhaotic Synchronization Algorithm Design
3.2. FPGA-Based Hyperchaotic Synchronization Design
- (1)
- The state machine is asynchronous reset, when the reset signal is valid, all signals are initialized, and the state converts to S0.
- (2)
- S0: The initial key key_tx [119:0] is assigned to chaos_x [119:96], chaos_y [95:72], chaos_z [71:48], chaos_w [47:24], chaos_v [23:0], while the output valid signal is pulled up, indicating that the output is valid at the time, the state converts to S1.
- (3)
- S1: Complete the shift operation and pull down the output valid signal, then the state converts to S2.
- (4)
- S2: When the state converts to S2, the result of S1 is added and subtracted, and the result of the operation needs to be extended by one sign bit in order to prevent the overflow of the sum. This paper completes polynomial multiplication and fractional bit processing operations in the outside of the always block; first, the characteristics of the sign bit and the truncated part to determine the need of a carry bit—if the number is positive, the highest bit of the truncated part is 1—then it is necessary to generate a carry bit. If the number is negative, it is necessary to determine whether the highest bit of the truncated part and the other bits in addition to the highest bit have 1, if that situation exists it is not necessary to generate a carry bit. After calculating the carry bit, it is added to the number after the truncated decimal bit to complete the rounding operation, and at the same time, to prevent overflow when adding the carry bit, it is necessary to carry out a sign bit expansion, and then the state converts to S3.
- (5)
- S3: In S2 we have completed the processing of fractional bits, in S3 we mainly deal with integer bits. We need to truncate the extra integer bits: if the part to be truncated and the highest bit after truncation is the same, that is, all 0 or all 1, then the part to be truncated is the extension of the sign bit, directly truncated; if different, the sign bit is judged, if positive, it will be changed to the maximum value that can be stored in the required format data, if negative, it will be changed to the minimum value that can be stored in the required format data. The final result is assigned to chaos_x, chaos_y, chaos_z, chaos_w, chaos_v, and then the valid signal of output is pulled up, the state converts to S1, the data is transferred to the syn_hyper_chaos system, and the set of data generation is completed.
- (1)
- The state machine is asynchronous reset, when the reset signal is valid, all signals are initialized and then the state converts to S0.
- (2)
- S0: The initial key key_rx [119:0] is assigned to syn_x [119:96], syn_y [95:72], syn_z [71:48], syn_w [47:24], syn_v [23:0], the first output sequence is the initial key, in the second iteration, the output of the hyper_chaos module will be input to the syn_hyper_chaos module to participate in circular iteration, and then the output valid signal is pulled up, indicating that the output is valid at this time, and the state converts to S1.
- (3)
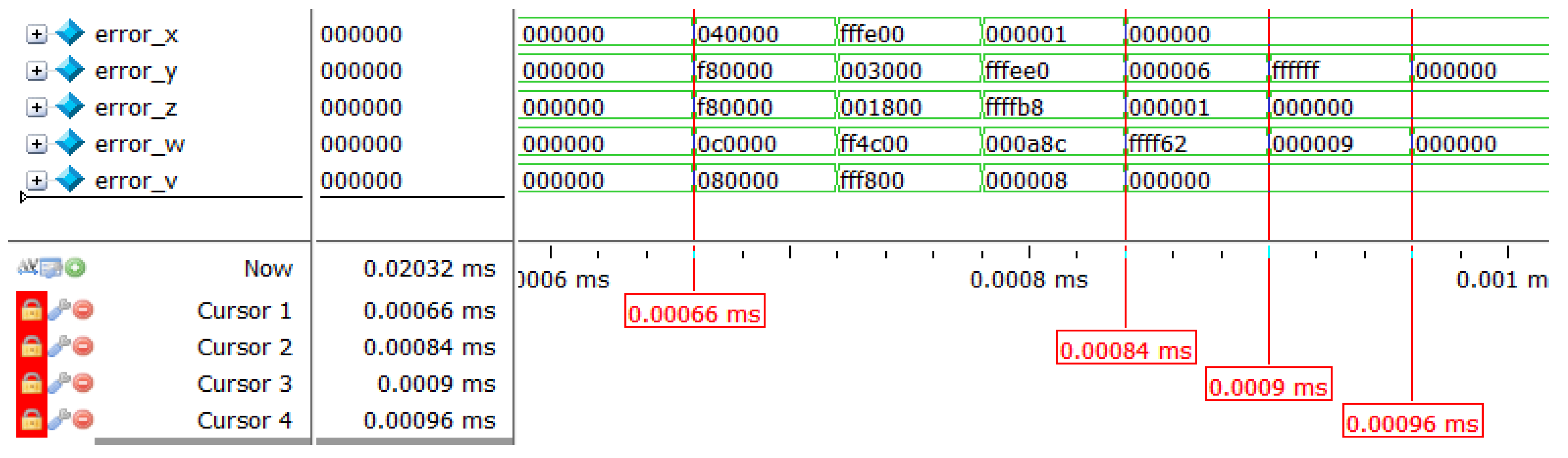
- S1: To complete the shift operation and pull down the output valid signal, in the syn_hyper_chaos module, the output needs to add error signals, the value of the error signal is the difference between the syn signal and the chaos signal, at this point the valid signal of error is pulled up and then the state converts to S2.
- (4)
- S2: When the state converts to S2, the result of S1 is added and subtracted, and the result of the operation needs to be extended by one sign bit in order to prevent the overflow of the sum. The same as the hyper_chaos module, the syn_hyper_chaos module completes polynomial multiplication and fractional bit processing operations in the outside of the always block. The valid signal of error is pulled down and the state converts to S3.
- (5)
- S3: In S2 we have completed the processing of fractional bits, in S3 we deal mainly with integer bits. We need to truncate the extra integer bits and assign the final result to syn_x, syn_y, syn_z, syn_w, syn_v, the valid signal of output is pulled up, and then the state converts to S1, the set of data generation is finished.
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lorenz, E.N. Deterministic Nonperiodic Flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Khalaf, A.J.M.; Abdolmohammadi, H.R.; Ahmadi, A.; Moysis, L.; Volos, C.; Hussain, I. Extreme multi-stability analysis of a novel 5D chaotic system with hidden attractors, line equilibrium, permutation entropy and its secure communication scheme. Eur. Phys. J. Spec. Top. 2020, 229, 1175–1188. [Google Scholar] [CrossRef]
- Ye, F.; Xu, S.; Wang, T.; Wang, Z.; Ren, T.; Hassan, A.S. Application of CNN Algorithm Based on Chaotic Recursive Diagonal Model in Medical Image Processing. Comput. Intell. Neurosci. 2021, 2021, 6168562. [Google Scholar] [CrossRef] [PubMed]
- Belazi, A.; Talha, M.; Kharbech, S.; Wei, X. Novel Medical Image Encryption Scheme Based on Chaos and DNA Encoding. IEEE Access 2019, 7, 36667–36681. [Google Scholar] [CrossRef]
- Bhogal, R.S.; Li, B.; Gale, A.; Chen, Y. Medical Image Encryption using Chaotic Map Improved Advanced Encryption Standard. Int. J. Inf. Technol. Comput. Sci. 2018, 10, 1–10. [Google Scholar] [CrossRef]
- Liao, T.; Chen, H.; Peng, C.Y.; Hou, Y.Y. Chaos-Based Secure Communications in Biomedical Information Application. Electronics 2021, 10, 359. [Google Scholar] [CrossRef]
- Biotechnology. Biomedical Engineering. In Reports Summarize Biomedical Engineering Findings from Kiet Group Institute (R-Peak Detection Using Chaos Analysis in Standard and Real Time ECG Databases); Biotech Week: Boston, MA, USA, 2020; Volume 102, pp. 479–490.
- Tong, X.; Liu, Y.; Zhang, M.; Xu, H.; Wang, Z. An Image Encryption Scheme Based on Hyperchaotic Rabinovich and Exponential Chaos Maps. Entropy 2015, 17, 181–196. [Google Scholar] [CrossRef]
- Gu, E.G. Bifurcations and Chaos for 2D Discontinuous Dynamical Model of Financial Markets. Int. J. Bifurc. Chaos 2017, 27, 1750185. [Google Scholar] [CrossRef]
- Idowu, B.A.; Olusola, O.I.; Onma, O.S.; Vaidyanathan, S.; Ogabi, C.O.; Adejo, O.A. Chaotic financial system with uncertain parameters-its control and synchronisation. Int. J. Nonlinear Dyn. Control 2019, 1, 271–286. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, C.; Xu, D.; Chen, C.-Y. Dynamic Analysis and Finite-Time Synchronization of a New Hyperchaotic System With Coexisting Attractors. IEEE Access 2019, 7, 52896–52902. [Google Scholar] [CrossRef]
- Li, S.; Wu, Y.; Zhang, X. Analysis and Synchronization of a New Hyperchaotic System with Exponential Term. Mathematics 2021, 9, 3281. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Guillén-Fernández, O.; Leutcho, G.D.; Vaidyanathan, S. FPGA design and circuit implementation of a new four-dimensional multistable hyperchaotic system with coexisting attractors. Int. J. Comput. Appl. Technol. 2020, 64, 223. [Google Scholar] [CrossRef]
- Belqassim, B.; Camel, T.; Said, S. Design and FPGA Implementation of New Multidimensional Chaotic Map for Secure Communication. J. Circuits Syst. Comput. 2021, 30, 2150280. [Google Scholar]
- Yuan, Z.; Li, H.; Zhu, X. Chen-like system design and its FPGA implementation. J. Nanjing Univ. Sci. Technol. 2015, 39, 323–329. [Google Scholar]
- Liu, P.; Qi, G.Y.; Wan, C.K.; Hu, Y.Q. FPGA design and implementation of super chaotic video encryption system. Telecommun. Technol. 2018, 58, 113–119. [Google Scholar]
- Sun, K.; Ye, Z.; He, S. FPGA design and implementation of chaotic pseudo-random sequence generator. Comput. Appl. Softw. 2014, 31, 7–11. [Google Scholar]
- Xue, W.; Tan, D.; Zhang, M.; Liu, S. FPGA-based synchronization of four-wing hyperchaotic systems and their confidential video communication. J. Shandong Univ. 2019, 49, 1–7. [Google Scholar]
- Tang, X.; Zhen, J.; Ding, Q. Chaos Synchronization and Voice Encryption of Discretized Hyperchaotic Chen Based on Euler Algorithm. In International Conference in Communications, Signal Processing, and Systems; Springer: Singapore, 2019; pp. 1576–1580. [Google Scholar]
- Liu, H. Research on Chaotic Synchronization and Its Application in Image Encryption; Northeastern University: Boston, MA, USA, 2014. [Google Scholar]
- Mehrjouyan, A.; Mohammad, B.M.; Mohammad, A.K. Robust observer-based adaptive synchronization control of uncertain nonlinear bilateral teleoperation systems under time-varying delay. Measurement 2021, 182, 109542. [Google Scholar] [CrossRef]
- Sun, S.; Zhao, Y.; Wu, H. Optimal Adaptive Control and Backstepping Control Method with Sliding Mode Differentiator. Complexity 2021, 2021, 9936224. [Google Scholar] [CrossRef]
- Huang, Y. Drive-Response Shape Asymptotic Synchronous Control of Chaotic Systems and Its Application; Guangdong University of Technology: Guangzhou, China, 2021. [Google Scholar]
- Regan, M.; Suresh, R.; Pugalarasu, R.; Kumar, K.S. Synchronization of Liu-Su-Liu and Liu-Chen-Liu Chaotic Systems by Nonlinear Feedback Control. J. Comput. Theor. Nanosci. 2019, 16, 4903–4907. [Google Scholar]
- Moon, S.; Baik, J.J.; Seo, J.M. Chaos synchronization in generalized Lorenz systems and an application to image encryption. Commun. Nonlinear Sci. Numer. Simul. 2021, 96, 105708. [Google Scholar] [CrossRef]
- Li, D.; Jin, M.; Fan, Z.; Da Dong, X. Achieving the Multi-Scroll Chaotic Attractors’ Synchronization in the Four-Dimensional System by Driving-Response Synchronization Method. Appl. Mech. Mater. 2014, 3485, 1076–1080. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, C.; Jiang, C. New four-dimensional hyperchaotic Liou systems and their chaotic synchronization. J. Univ. Electron. Sci. Technol. 2013, 296, 235–237. [Google Scholar]
- Min, X.; Wang, X.; Zhou, P.; Yu, S.; Iu, H.H.-C. An Optimized Memristor-Based Hyperchaotic System With Controlled Hidden Attractors. IEEE Access 2019, 7, 124641–124646. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Tlelo-Cuautle, E.; Guillén-Fernández, O.; Benkouider, K.; Sambas, A. A New 4-D Hyperchaotic System with No Balance Point, Its Bifurcation Analysis, Multi-Stability, Circuit Simulation, and FPGA Realization. In Complex Systems and Their Applications; Springer: Cham, Switzerland, 2022; pp. 177–200. [Google Scholar]
- Ding, L.; Ding, Q. The Establishment and Dynamic Properties of a New 4D Hyperchaotic System with Its Application and Statistical Tests in Gray Images. Entropy 2020, 22, 310. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | LE1 | LE2 | LE3 | LE4 | LE5 | Attractor Morphology |
|---|---|---|---|---|---|---|
| −0.095 | 0.0137 | −0.0810 | −0.9829 | −5.0398 | −5.0774 | Periodic attractor |
| 0.055 | 0.4044 | 0.0064 | −0.1136 | −1.4236 | −10.9422 | Chaotic attractor |
| 0.423 | 1.9380 | 0.1391 | −0.0084 | −2.3637 | −11.1328 | Hyperchaotic attractor |
| Proposal | The Maximum Lyapunov Exponent |
|---|---|
| ours | 1.9380 |
| Ref. [25] | 1.0461 |
| Ref. [26] | 0.7362 |
| Ref. [27] | 1.0100 |
| Ref. [28] | 0.0044 |
| Ref. [29] | 1.0241 |
| Testing Item | p-Value(x) | Result |
|---|---|---|
| Approximate Entropy | 0.210398 | pass |
| Block Frequency | 0.180283 | pass |
| Cumulative Sum | 0.582341 | pass |
| FFT | 0.596701 | pass |
| Frequency | 0.645639 | pass |
| Linear Complexity | 0.151631 | pass |
| Longest Run | 0.408543 | pass |
| NonOverlapping template | 0.601890 | pass |
| Overlapping template | 0.851142 | pass |
| Random Excursion | 0.621039 | pass |
| Random Excursions Variant | 0.602752 | pass |
| Rank | 0.298427 | pass |
| Runs | 0.054103 | pass |
| Serial1 | 0.200412 | pass |
| Serial2 | 0.145922 | pass |
| Universal | 0.304519 | pass |
| Hyperchaotic System | m | t | PE |
|---|---|---|---|
| Ours | 3 | 1 | 0.7024 |
| Ref. [28] | 3 | 1 | 0.6841 |
| Ref. [29] | 3 | 1 | 0.5714 |
| Ref. [30] | 3 | 1 | 0.6201 |
| Signal | Signal Definition |
|---|---|
| clk | The system clock |
| rst_n | The reset signal |
| key_tx [119:0] | Initial key on the transmitter |
| tx_valid | Transmit initial key valid signal |
| key_rx [119:0] | Initial key on the receiver |
| rx_valid | Receive initial key valid signal |
| syn_x/syn_y/syn_z/ syn_w/syn_ v [23:0] | The synchronised sequence |
| error_x/error_y/error_z/ error_w/error_v [23:0] | Sequence error |
| Testing Item | p-Value(x) | Result |
|---|---|---|
| Approximate Entropy | 0.352142 | pass |
| Block Frequency | 0.199847 | pass |
| Cumulative Sum | 0.421255 | pass |
| FFT | 0.751245 | pass |
| Frequency | 0.604212 | pass |
| Linear Complexity | 0.320412 | pass |
| Longest Run | 0.201485 | pass |
| Non-Overlapping template | 0.581245 | pass |
| Overlapping template | 0.782121 | pass |
| Random Excursion | 0.604712 | pass |
| Random Excursions Variant | 0.580073 | pass |
| Rank | 0.300047 | pass |
| Runs | 0.067581 | pass |
| Serial1 | 0.200412 | pass |
| Serial2 | 0.102476 | pass |
| Universal | 0.294578 | pass |
| Resource | Utilization | Available | Utilization% |
|---|---|---|---|
| LUT | 2477 | 41,000 | 6.04 |
| LUTRAM | 26 | 13,400 | 0.19 |
| FF | 1963 | 82,000 | 2.39 |
| DSP | 40 | 240 | 16.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, X.; Li, X.; Guang, Y.; Wu, Y.; Ding, Q. FPGA-Based Implementation and Synchronization Design of a New Five-Dimensional Hyperchaotic System. Entropy 2022, 24, 1179. https://doi.org/10.3390/e24091179
Wang Y, Li X, Li X, Guang Y, Wu Y, Ding Q. FPGA-Based Implementation and Synchronization Design of a New Five-Dimensional Hyperchaotic System. Entropy. 2022; 24(9):1179. https://doi.org/10.3390/e24091179
Chicago/Turabian StyleWang, Ya, Xinyu Li, Xiaodong Li, Yerui Guang, Yanan Wu, and Qun Ding. 2022. "FPGA-Based Implementation and Synchronization Design of a New Five-Dimensional Hyperchaotic System" Entropy 24, no. 9: 1179. https://doi.org/10.3390/e24091179