

Research on Three-Phase Asynchronous Motor Fault Diagnosis Based on Multiscale Weibull Dispersion Entropy

Abstract
:1. Introduction
- (1)
- In terms of theoretical research, for the nonlinear and unsteady characteristics of three-phase asynchronous motor fault signals, traditional feature extraction cannot fully and comprehensively mine the fault information nor obtain more abundant information about the motor operating state. The WB-MDE proposed in this paper is able to linearize and smooth the vibration data and is able to quantify the regularity of the data to obtain sensitive information about the motor faults, which fills in the gap in this area of research.
- (2)
- In terms of noise resistance and generalization, the traditional methods do not have good noise resistance and generalization and cannot be widely applied. The model proposed in this paper has good noise resistance and generalization in three-phase asynchronous motor fault diagnosis. In three-phase asynchronous motor health monitoring and intelligent fault diagnosis, the recognition effect is more stable and has better generalization ability and noise resistance, which means it can be more widely applied in practice.
2. Introduction of Principles
2.1. Multiscale Weibull Dispersion Entropy (WB-MDE)
2.2. t-Distributed Stochastic Neighborhood Embedding (t-SNE)
2.3. Particle Swarm Optimization–Support Vector Machine (PSO-SVM)
2.4. Fault Diagnosis Process
3. Three-Phase Asynchronous Motor Experiment
3.1. Experimental Data Acquisition Platform Construction
3.2. Experimental Design
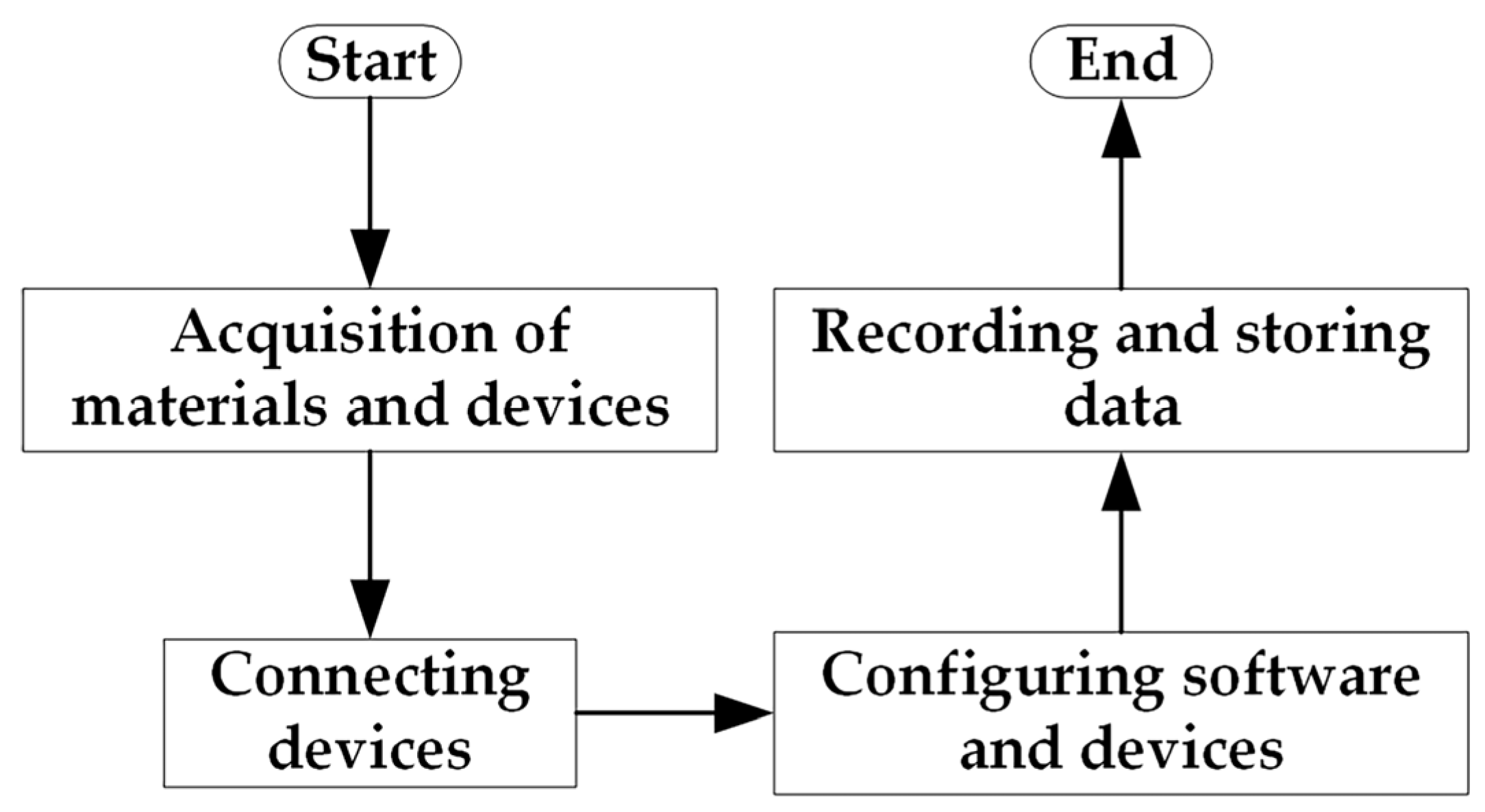
3.3. Experimental Procedure
- (1)
- Experiment preparation:
- (2)
- Equipment installation:
- (3)
- Data acquisition equipment and software configuration:
- (4)
- Data acquisition and storage:
4. Analysis of Results
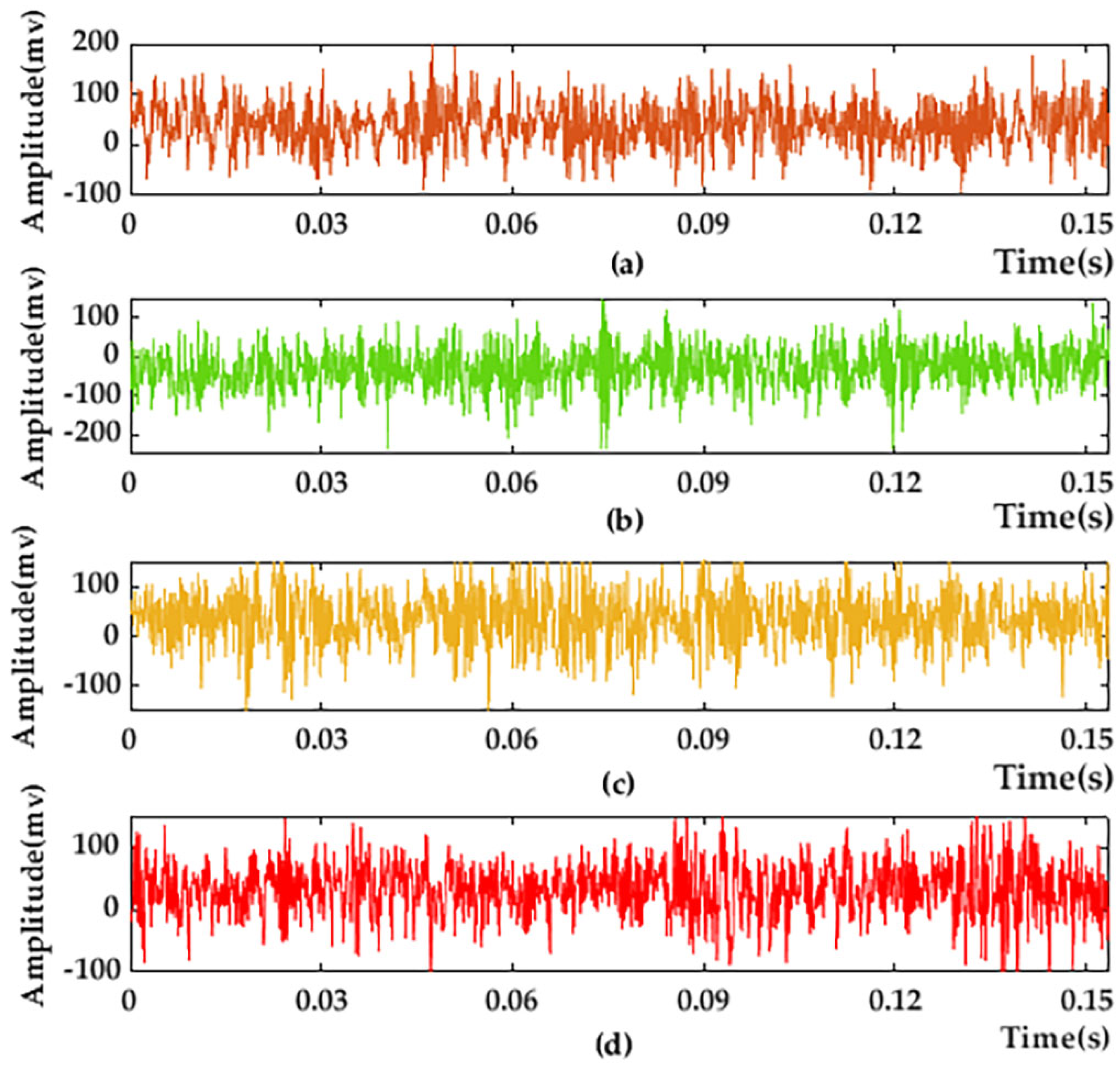
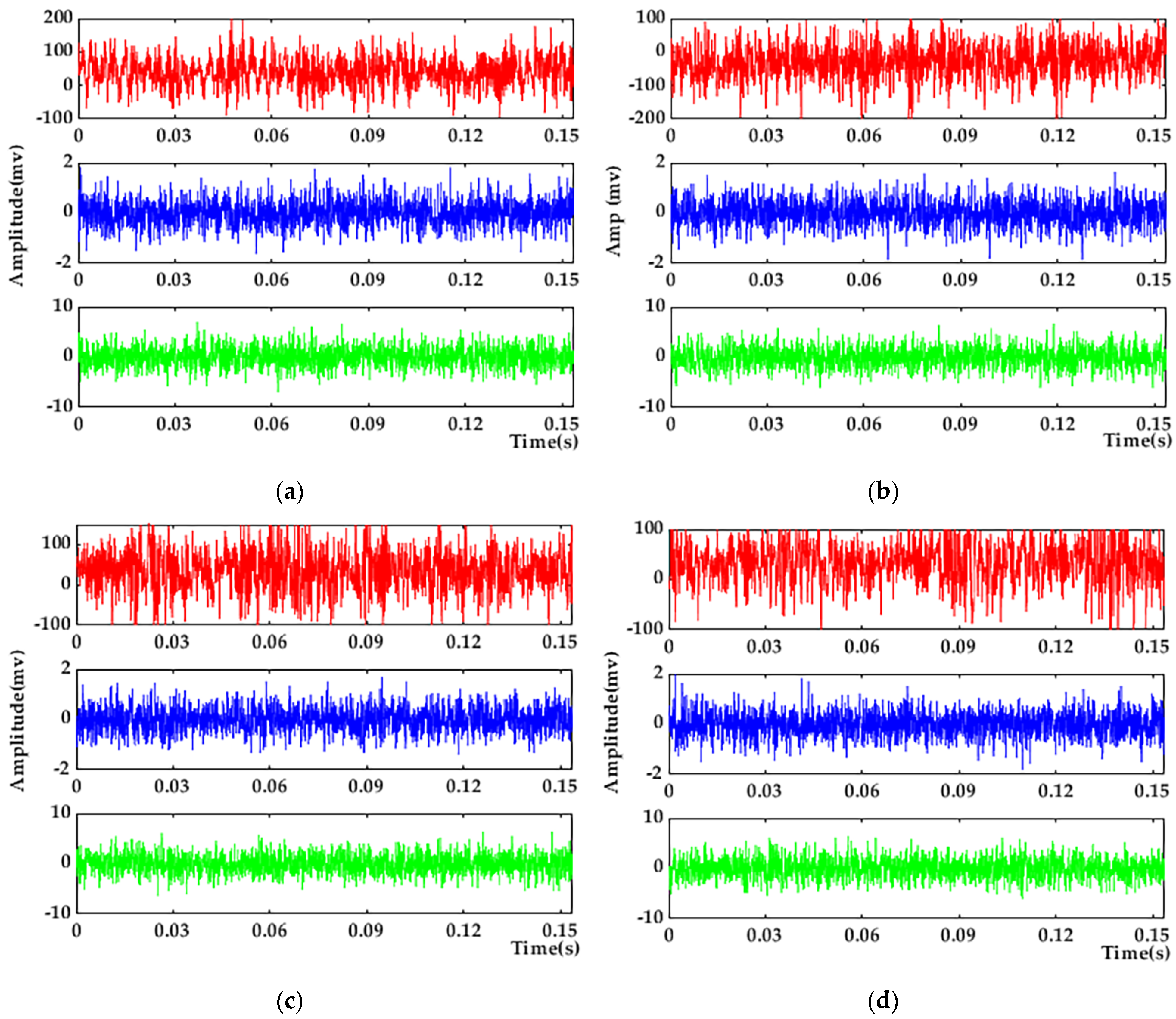
4.1. Analysis of Raw Data
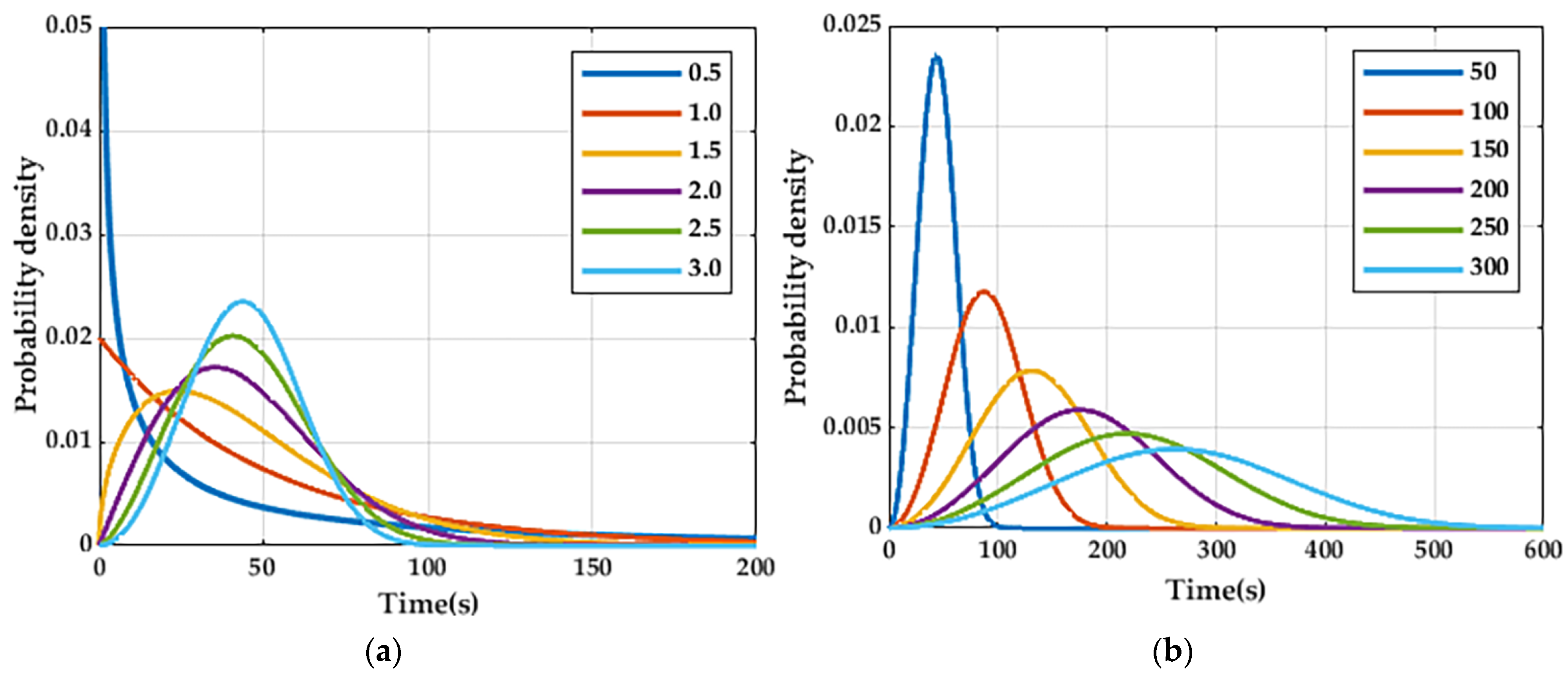
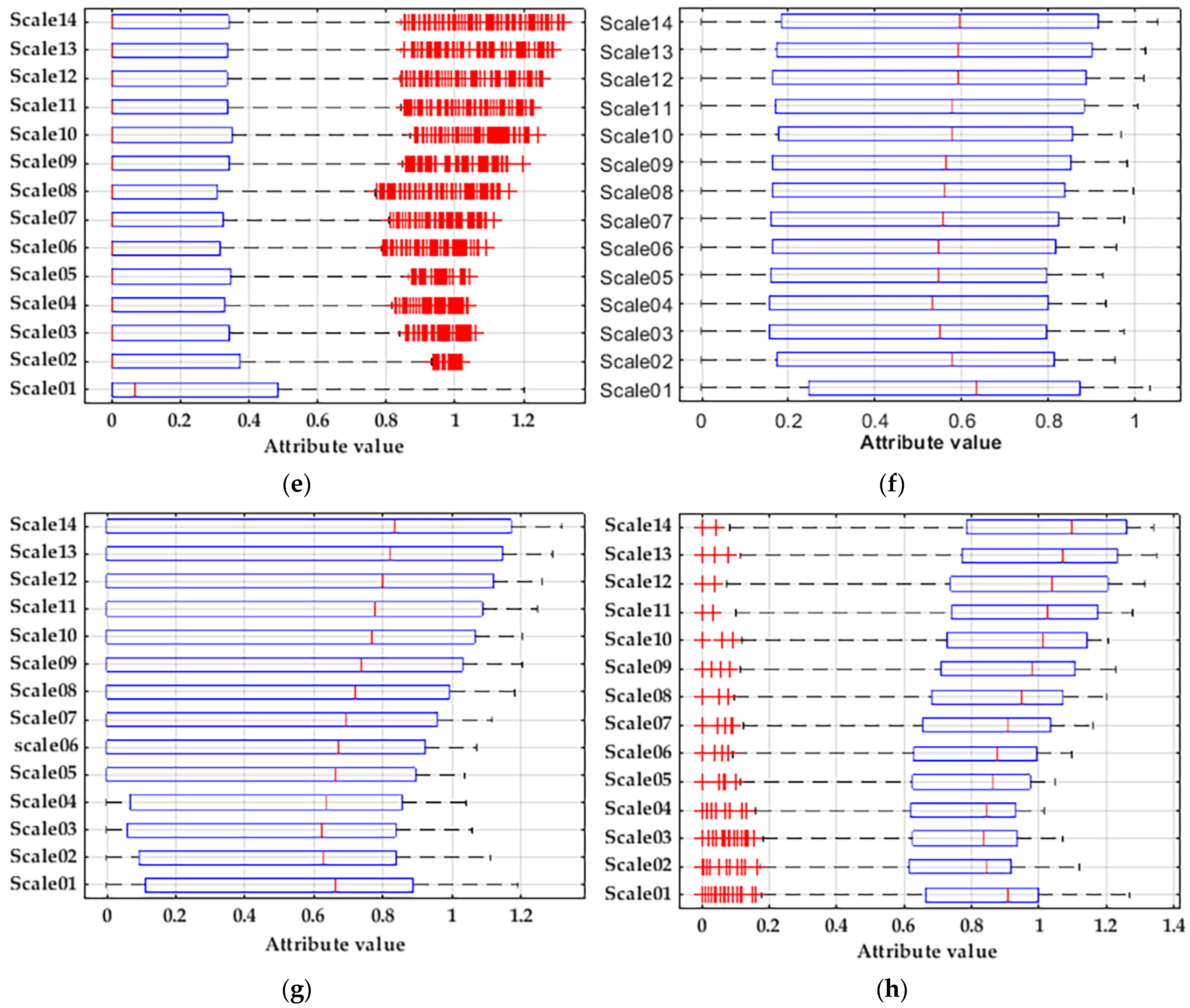
4.2. Sensitivity Analysis of WB-MDE Parameters
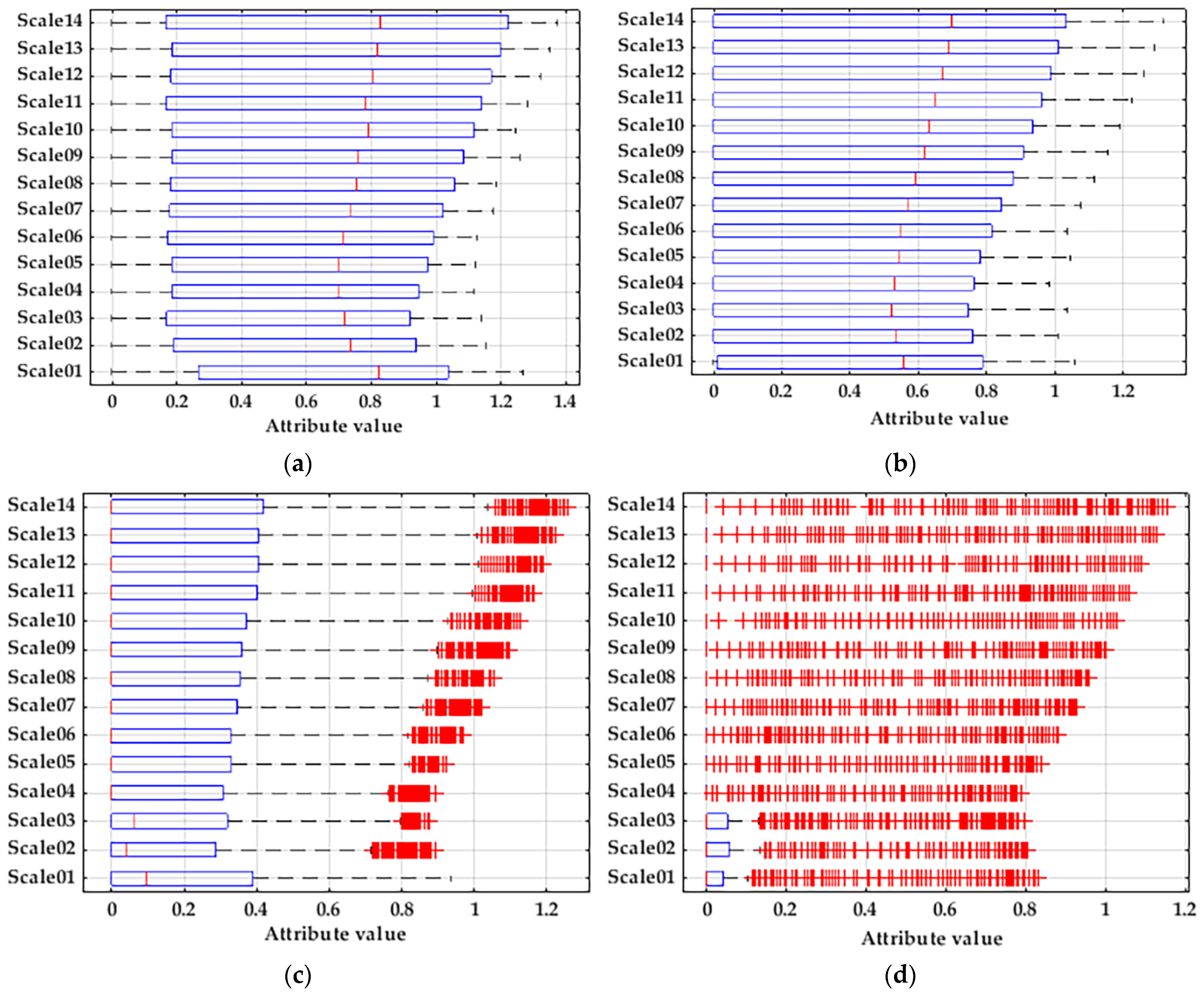
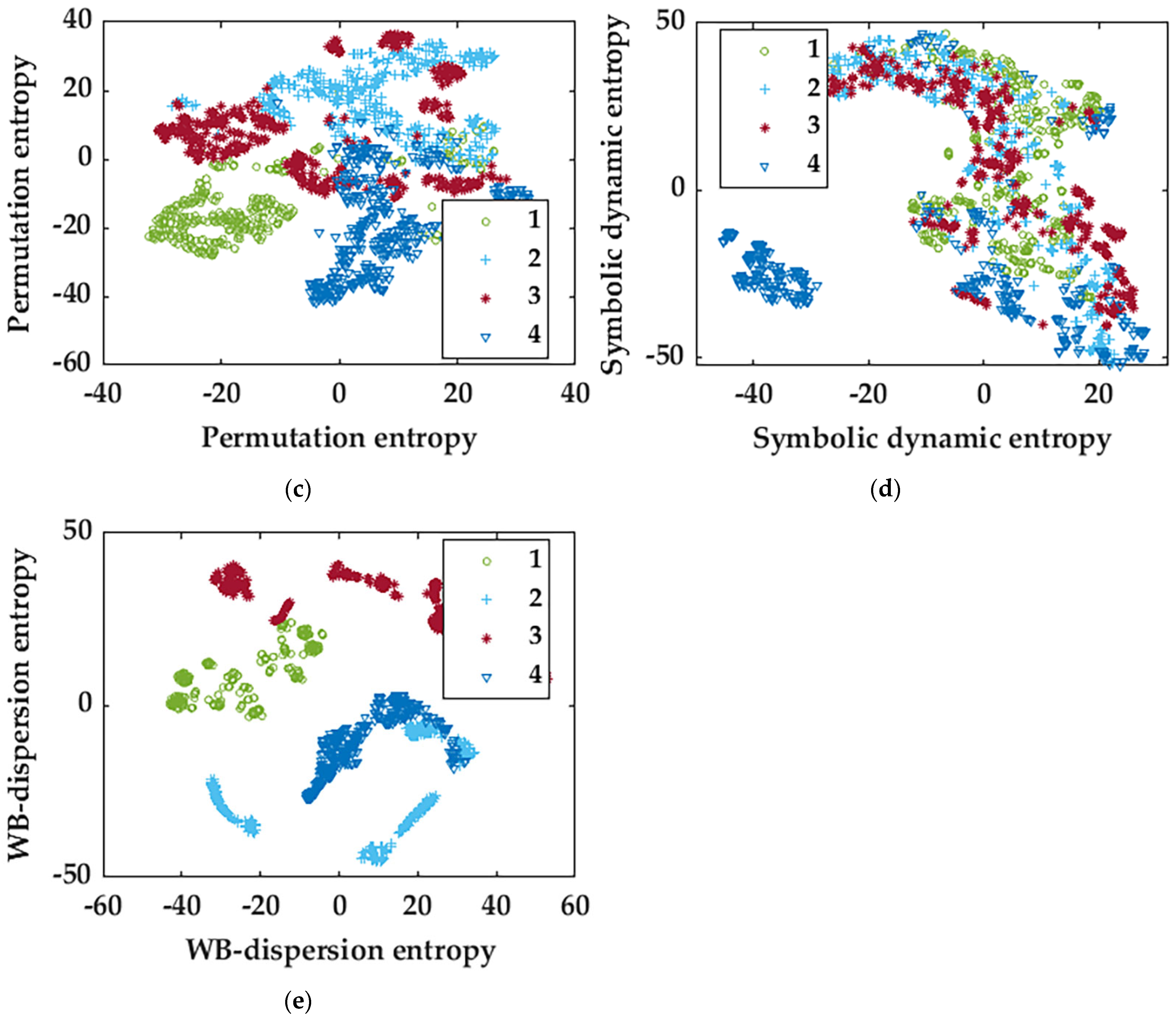
4.3. Result Analysis of Different Characteristics
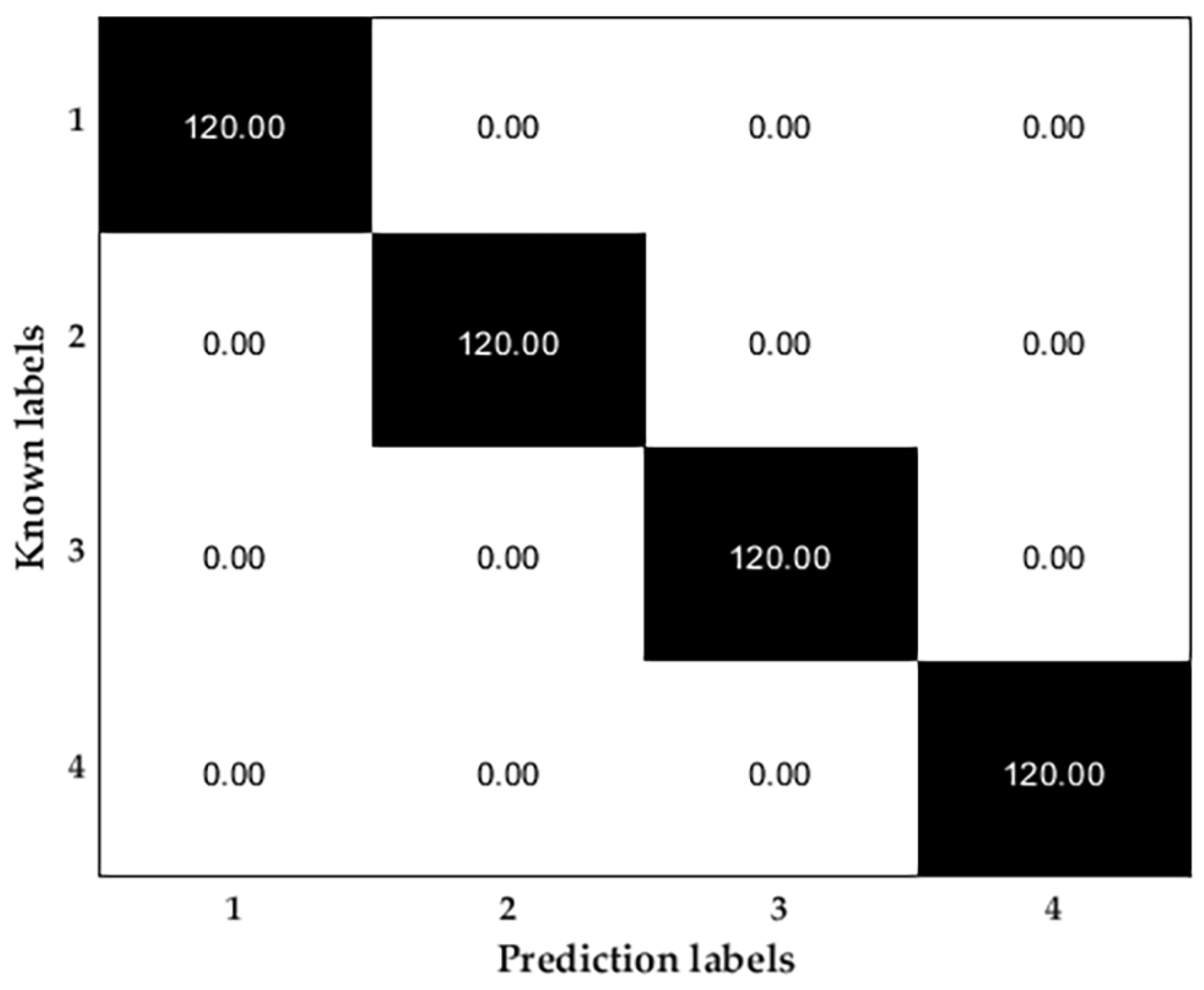
4.4. Analysis of Results for Different Classifiers
5. Noise Resistance and Generalization Test
5.1. Noise-Resistance Test
5.2. Generalizability Test
6. Conclusions
- (1)
- The multi-scale Weber dispersion entropy proposed in this paper can fully and comprehensively mine the fault information of the three-phase asynchronous motor fault state, overcome the problem of nonlinear and non-smooth fault signals, obtain more sensitive information about the operating state of a motor, quantify the regularity of the data features, and improve the utilization rate of the original data and the stability of the classifiers.
- (2)
- The proposed model in this paper has good noise immunity and generalization for three-phase asynchronous motor fault diagnosis. By adding Gaussian white noise with different signal-to-noise ratios to the original data and utilizing public datasets for detection, the model indicates broad and steady applications.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hou, Z.; Wang, H.; Xiong, M.; Wang, J. Gearbox fault diagnosis based on migration learning and weighted multichannel fusion. Vib. Shock 2023, 42, 236–246. [Google Scholar]
- Li, J.; Luo, W.; Chen, W. A review of vibration signal-oriented fault diagnosis algorithms for rolling bearings. J. Xi’an Univ. Technol. 2022, 42, 105–122. [Google Scholar]
- Li, S.; Xue, Y.; Chi, S.; Fan, X.; Zhang, Y.; Yang, W. Intelligent Detection of Lost and Loose Rail Fastener Components Based on 3D Camera. J. Railw. Sci. Eng. 2023, 45, 1–11. Available online: https://kns.cnki.net/kcms2/article/abstract?v=DNPf6DgFiJv5RHXv3ne1cxccd4thDkMC90EdK91VVI7xLtjClv5MNACv5N-WfxhFzrI58osyTv4dS17Qscwr9F3Sj_m1VxAIUi2BsuTNabIFsXroaWXdORqkWNobUROLbV4wQW2cnzA=&uniplatform=NZKPT&language=CHS (accessed on 10 October 2023).
- Li, Z.; Wang, F.; Zhang, P. Research on strong generalizability fault diagnosis of permanent magnet synchronous motor drives based on image fusion and migration learning. Chin. J. Electr. Eng. 2023, 60, 1–11. [Google Scholar]
- Baudot, P.; Bennequin, D. The Homological Nature of Entropy. Entropy 2015, 17, 3253–3318. [Google Scholar] [CrossRef]
- Sanz, Á.S. Young’s Experiment with Entangled Bipartite Systems: The Role of Underlying Quantum Velocity Fields. Entropy 2023, 25, 1077. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Yang, S.; Zhang, H.; Sun, Z.; Du, J. Online Multi-Label Streaming Feature Selection Based on Label Group Correlation and Feature Interaction. Entropy 2023, 25, 1071. [Google Scholar] [CrossRef]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol.-Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Yan, R.; Liu, Y.; Gao, R.X. Permutation entropy: A nonlinear statistical measure for status characterization of rotary machines. Mech. Syst. Signal Process. 2012, 29, 474–484. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Z.; Xie, H.; Yu, W. Characterization of surface EMG signal based on fuzzy entropy. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 266–272. [Google Scholar] [CrossRef] [PubMed]
- Noble, W.S. What is a support vector machine. Nat. Biotechnol. 2006, 24, 1565–1567. [Google Scholar] [CrossRef]
- Van den Bergh, F.; Engelbrecht, A.P. A study of particle swarm optimization particle trajectories. Inf. Sci. 2006, 176, 937–971. [Google Scholar] [CrossRef]
- Zhang, S.; Duan, X.; Zhang, L.; Jiang, A.; Yao, Y.; Liu, Y.; Mu, Y. t-SNE dimensionality reduction visualization analysis and moth-flame optimization of ELM algorithm in power load forecasting. Chin. J. Electr. Eng. 2021, 41, 3120–3130. [Google Scholar]
- Gisbrecht, A.; Schulz, A.; Hammer, B. Parametric nonlinear dimensionality reduction using kernel t-SNE. Neurocomputing 2015, 147, 71–82. [Google Scholar] [CrossRef]
- Jordehi, A.R. Enhanced leader PSO (ELPSO): A new PSO variant for solving global optimization problems. Appl. Soft Comput. 2015, 26, 401–417. [Google Scholar] [CrossRef]
- Nguyen, H.; Moayedi, H.; Foong, L.K.; Al Najjar, H.A.H.; Jusoh, W.A.W.; Rashid, A.S.A.; Jamali, J. Optimizing ANN models with PSO for predicting short building seismic response. Eng. Comput. 2020, 36, 823–837. [Google Scholar] [CrossRef]
- Liu, S.; Chen, J. Construction safety evaluation of rocky slopes based on nested dominant relationship rough set and fuzzy theory. J. Railw. Sci. Eng. 2023, 45, 1–12. [Google Scholar]
- Zhu, J.; Chen, G.; Chen, L.; Gao, Y.; Zhang, Q. Influence of bottom rear-end disturbance on the flow field and aerodynamic noise characteristics in the bogie region of a high-speed train. China Railw. Sci. 2022, 43, 119–130. [Google Scholar]
- Li, X. Research on the Feature Extraction Method of Railroad Wagon Wheelset Bearing Faults under Variable Speed. Ph.D. Dissertation, Shijiazhuang Railway University, Shijiazhuang, China, 2022. [Google Scholar]
- Seguro, J.V.; Lambert, T.W. Modern estimation of the parameters of the Weibull wind speed distribution for wind energy analysis. J. Wind Eng. Ind. Aerodyn. 2000, 85, 75–84. [Google Scholar] [CrossRef]
- Wu, Y.; Shang, P.; Li, Y. Multiscale sample entropy and cross-sample entropy based on symbolic representation and similarity of stock markets. Commun. Nonlinear Sci. Numer. Simul. 2018, 56, 49–61. [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Improved multiscale permutation entropy for biomedical signal analysis: Interpretation and application to electroencephalogram recordings. Biomed. Signal Process. Control 2016, 23, 28–41. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Wang, X.; Liu, B.; Liang, X. Early fault diagnosis of rolling bearings based on hierarchical symbol dynamic entropy and binary tree support vector machine. J. Sound Vib. 2018, 428, 72–86. [Google Scholar] [CrossRef]
- Svantesson, M.; Olausson, H.; Eklund, A.; Thordstein, M. Get a New Perspective on EEG: Convolutional Neural Network Encoders for Parametric t-SNE. Brain Sci. 2023, 13, 453. [Google Scholar] [CrossRef]
- Lebreton, C.; Kbidi, F.; Graillet, A.; Jegado, T.; Alicalapa, F.; Benne, M.; Damour, C. PV system failures diagnosis based on multiscale dispersion entropy. Entropy 2022, 24, 1311. [Google Scholar] [CrossRef] [PubMed]
- Chauhan, V.K.; Dahiya, K.; Sharma, A. Problem formulations and solvers in linear SVM: A review. Artif. Intell. Rev. 2019, 52, 803–855. [Google Scholar] [CrossRef]
- Xu, R.; Wang, H.; Peng, M.; Deng, Q.; Wang, X. A new method for residual life prediction and its application to rolling bearings. Vib. Test Diagn. 2022, 42, 636–643+820. [Google Scholar]
- Wang, R.; Huang, Y.; Zhang, J.; Yu, L. Enhancement and extraction of weak fault features in the order spectrum correlation domain of rolling bearings under variable speed. Meas. Control Technol. 2023, 42, 79–86+92. [Google Scholar]
- Li, Y.; Xue, Q.; Wang, J.; Wang, C.; Shan, Y. Pattern recognition of stick-slip vibration in combined signals of DrillString vibration. Measurement 2022, 204, 112034. [Google Scholar] [CrossRef]
- Janan, F.; Chowdhury, N.; Zaman, K. A New Approach for Control Chart Pattern Recognition Using Nonlinear Correlation Measure. SN Comput. Sci. 2022, 3, 358. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | η | β | Classifier | Train Accuracy Rate | Test Accuracy Rate |
|---|---|---|---|---|---|
| a | 50 | 0.5 | Pso-svm m = 2 t = 1 c = 6 scale = 14 | 95.08% | 94.58% |
| b | 50 | 1.0 | 89.79% | 89.79% | |
| c | 50 | 1.5 | 81.25% | 81.25% | |
| d | 50 | 2.0 | 61.04% | 61.04% | |
| e | 50 | 2.5 | 70.20% | 70.20% | |
| f | 50 | 3.0 | 100% | 100% | |
| g | 25 | 3.0 | 0 | 0 | |
| h | 75 | 3.0 | 97.65% | 97.29% | |
| i | 100 | 3.0 | 96.33% | 96.45% | |
| j | 125 | 3.0 | 0 | 0 |
| Features | Classifier | Parameters | Training Correctness | Test Correctness |
|---|---|---|---|---|
| MSE | PSO-SVM | m = 2 scale = 14 r = 0.15 | 93.54% | 92.85% |
| MFE | m = 2 scale = 14 r = 5 n = 2 | 97.29% | 95.26% | |
| MPE | m = 2 scale = 14 t = 1 | 96.45% | 94.55% | |
| MSDE | m = 2 scale = 14 sigma = 12 | 83.12% | 86.07% | |
| WB-MDE | m = 2 scale = 14 t = 1 c = 6 η = 50 β = 3 | 100% | 100% |
| Classifiers | Parameters | Recognition Correctness |
|---|---|---|
| K Nearest Neighbor Classifier | Numneighbors = 10 | 97.70% |
| Random Forest Classifier | Ntree = 1 | 97.91% |
| BP Neural Network Classifier | Ir = 0.1 mnist = 0.1 | 97.80% |
| SVM Classifier | −c = 1.5 −g = 1.7 | 96.66% |
| PSO-SVM | −c = 1.5 −g = 1.7 pop = 20 ta = 200 | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, F.; Sun, E.; Zhou, S.; Shang, J.; Wang, Y.; Fan, Q. Research on Three-Phase Asynchronous Motor Fault Diagnosis Based on Multiscale Weibull Dispersion Entropy. Entropy 2023, 25, 1446. https://doi.org/10.3390/e25101446
Xie F, Sun E, Zhou S, Shang J, Wang Y, Fan Q. Research on Three-Phase Asynchronous Motor Fault Diagnosis Based on Multiscale Weibull Dispersion Entropy. Entropy. 2023; 25(10):1446. https://doi.org/10.3390/e25101446
Chicago/Turabian StyleXie, Fengyun, Enguang Sun, Shengtong Zhou, Jiandong Shang, Yang Wang, and Qiuyang Fan. 2023. "Research on Three-Phase Asynchronous Motor Fault Diagnosis Based on Multiscale Weibull Dispersion Entropy" Entropy 25, no. 10: 1446. https://doi.org/10.3390/e25101446
APA StyleXie, F., Sun, E., Zhou, S., Shang, J., Wang, Y., & Fan, Q. (2023). Research on Three-Phase Asynchronous Motor Fault Diagnosis Based on Multiscale Weibull Dispersion Entropy. Entropy, 25(10), 1446. https://doi.org/10.3390/e25101446