
Early Fault Detection of Rolling Bearings Based on Time-Varying Filtering Empirical Mode Decomposition and Adaptive Multipoint Optimal Minimum Entropy Deconvolution Adjusted


Abstract
:1. Introduction
2. TVFEMD Algorithm
2.1. Principle of TVFEMD Algorithm
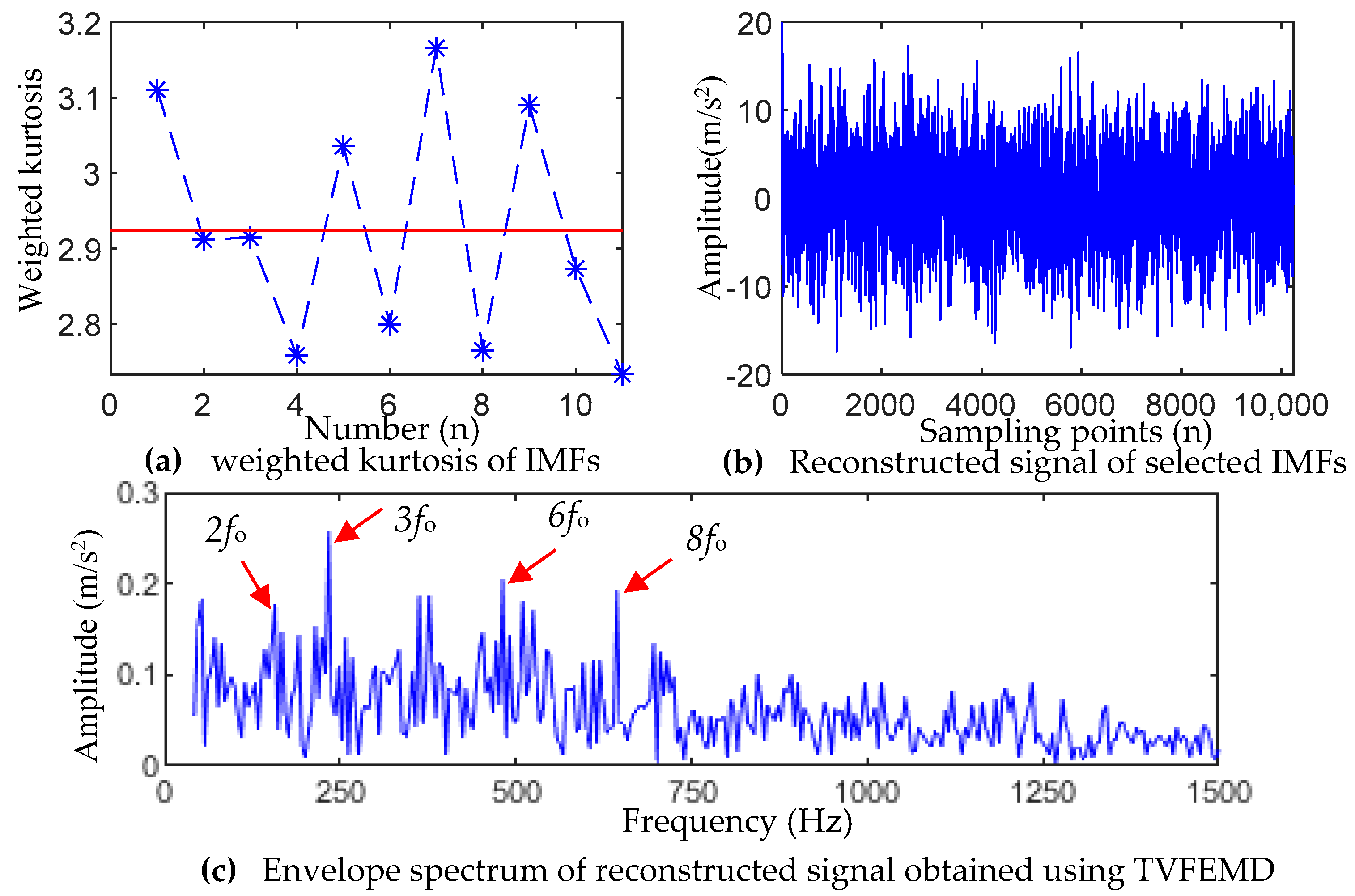
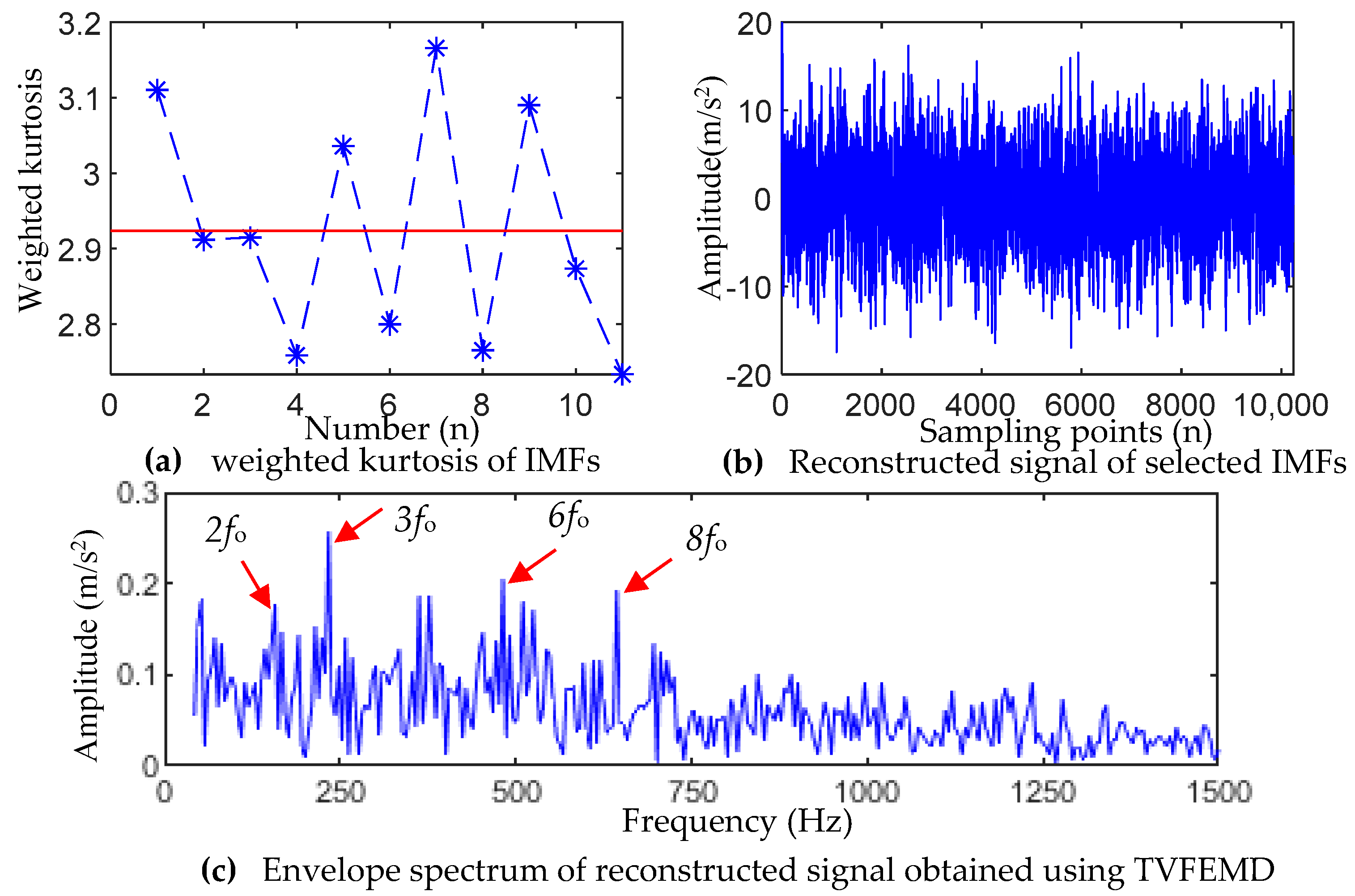
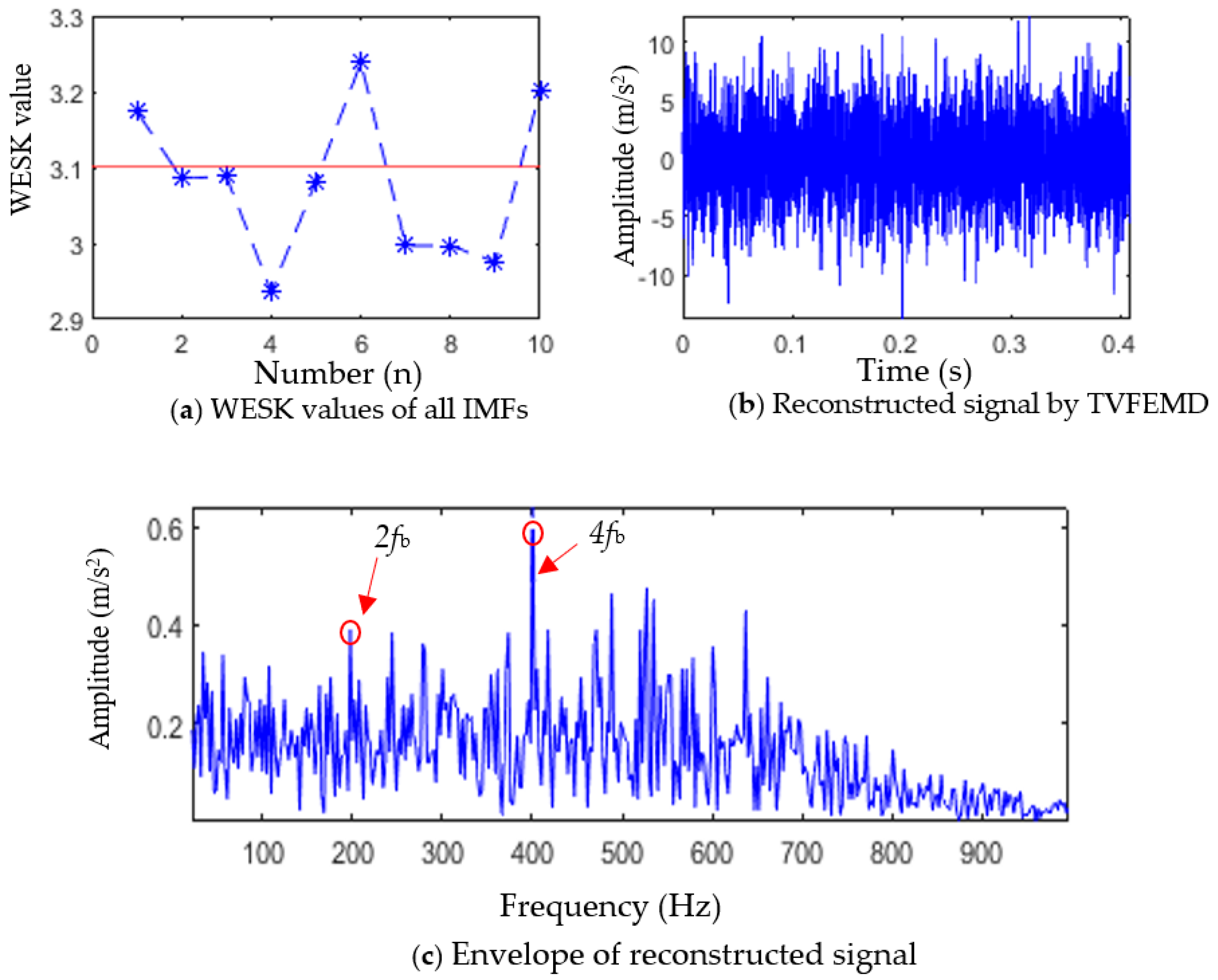
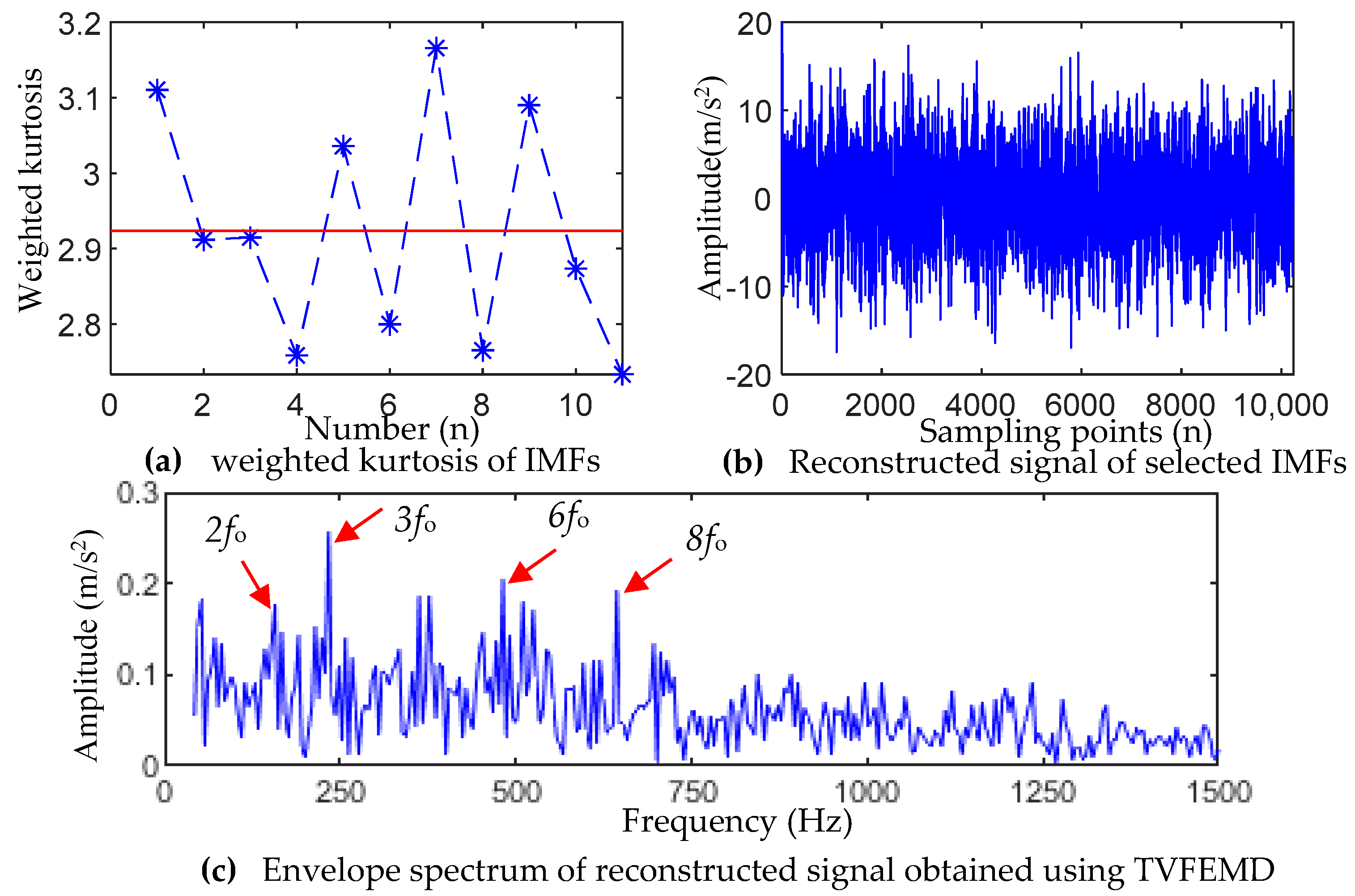
2.2. Selection of Modal Components
3. Adaptive MOMEDA
3.1. Principle of MOMEDA Method
3.2. Analysis of MOMEDA Input Parameters
- The window function . The window function is used to further extend the target vector, which can improve the clarity of the spectrum and the accuracy of fault shock sequence extraction. In consideration of computational efficiency and the convolution enhancement effect, rectangular windows with a length of 3 are adopted, that is, .
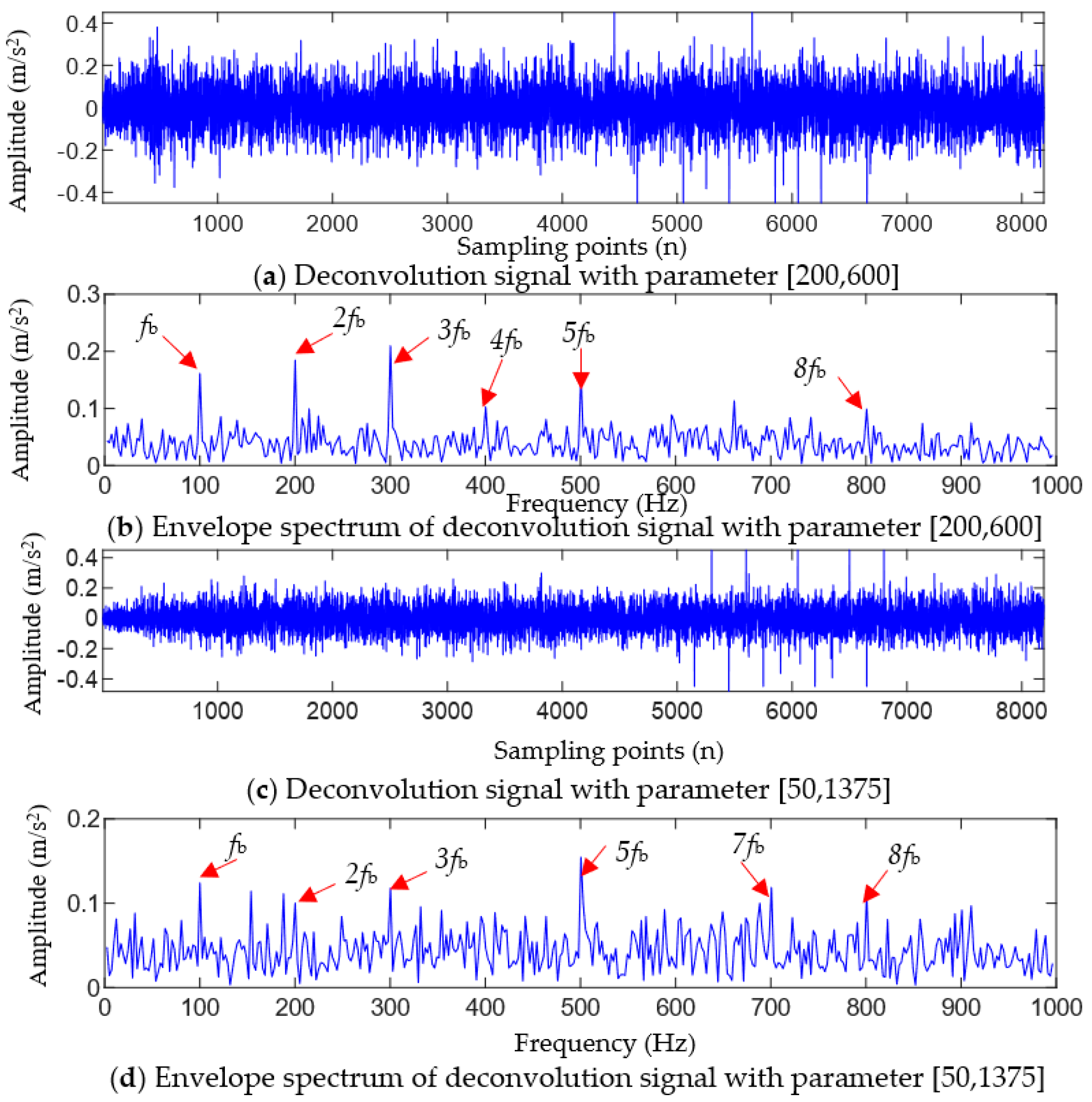
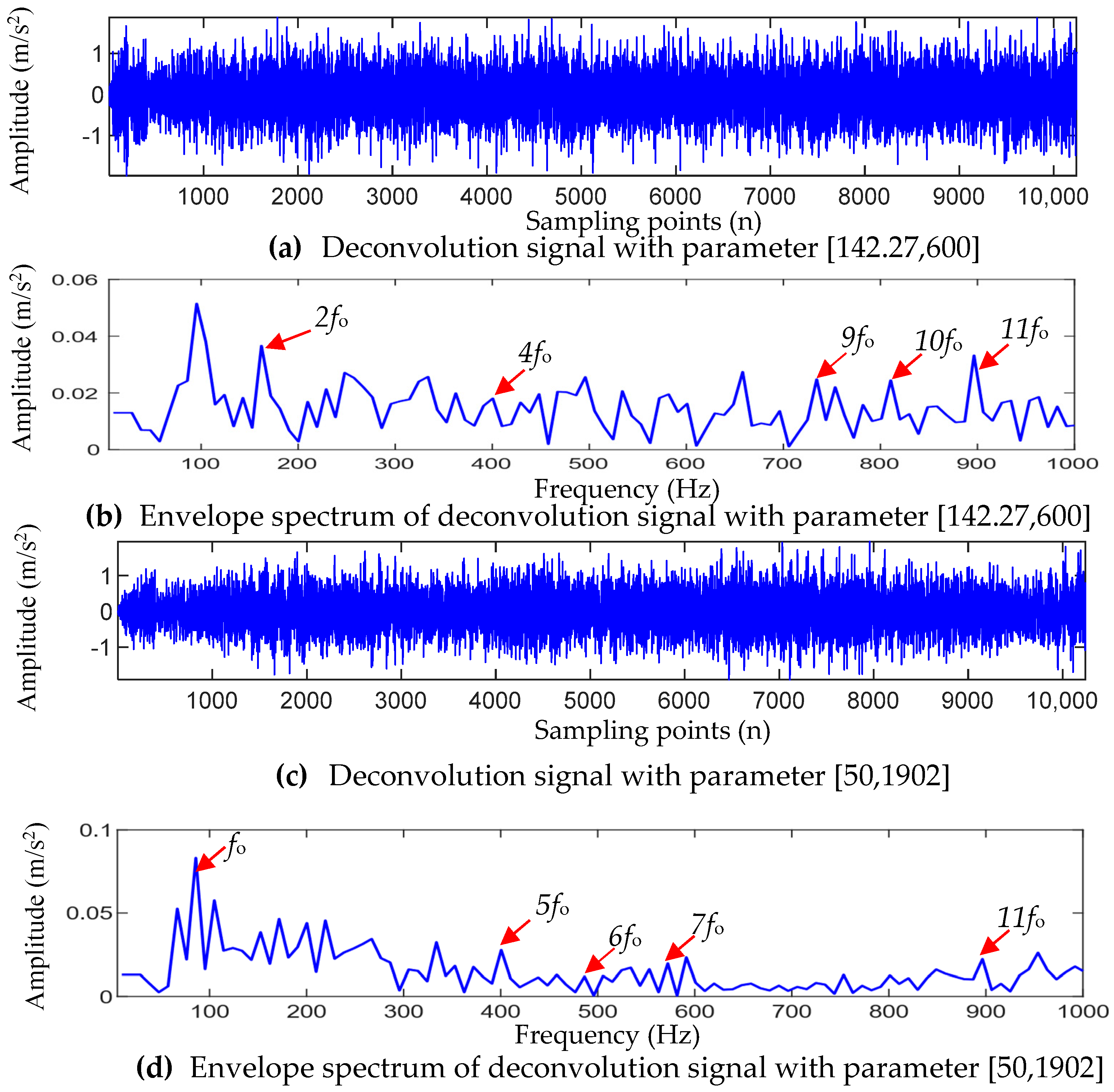
- The filter length . It directly affects the effect of pulse sequence extraction. In order to ensure that the extracted shock sequence can cover the entire frequency band of the fault, the filter length should meet the following condition [25,26]:where is the sampling frequency of the signal, and is the fault characteristic frequency. In this paper, represents three kinds of fault characteristic frequency, that is , where is the inner ring fault frequency, is the outer ring fault frequency, and is the ball fault frequency. However, increasing the filter length will reduce the deconvolution signal length to , which will cause serious loss of fault information. At the same time, increasing will consume more computing time. Therefore, the selection range of filter length is set as in this paper.
- Fault cycle search range . and are the initial and final values of periodic fault search, respectively. According to the calculation formula of bearing characteristic frequency, the characteristic frequency and failure period of each unit (inner ring , outer ring and rolling body ) can be calculated as follows: ( is the inner ring failure cycle; is the failure period of the outer ring; and is the failure period of the rolling body. Since the characteristic frequency between each unit of the bearing satisfies , the failure period satisfies . When the search interval contains the fault period, the final value will not affect the extraction of the fault impact sequence [21]. Therefore, is chosen according to the actual operation of bearings. In the experiment, according to the fault forms of different bearing units, the initial value of the failure period is selected in the interval range .
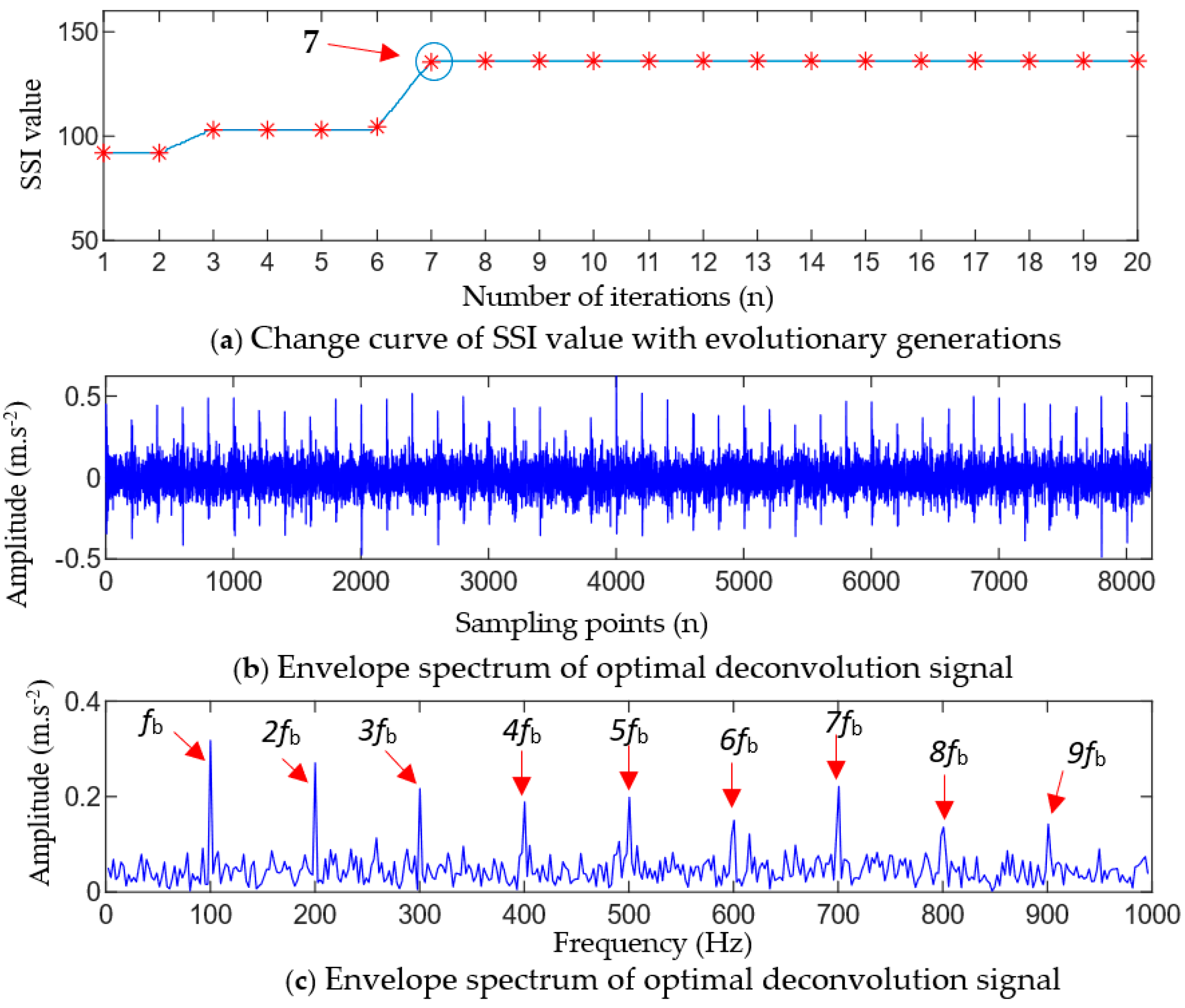
- Optimize parameters and . To select the optimal parameter combination , a new index of multi-objective optimization is constructed to adaptively determine the filter length and the initial value of the fault cycle search. In the time domain, the root mean square of the maximum of autocorrelation function (MOAF) is used to measure the periodic fault impact components contained in the deconvolution signals [26,27]. The core of this index is the autocorrelation function. If the main component of a deconvolved signal is noise, its autocorrelation function will soon decay to 0, and the MOAF value will be very small and close to 0. If the deconvolved signal contains obvious periodic fault impact components, its autocorrelation function is periodic, and the MOAF value is larger. Therefore, the MOFM index is used to measure the extraction effect of deconvolution operation on fault shock sequences, and its expression is as follows:where , and is the delay in the autocorrelation function.
3.3. MOMEDA with Adaptive Parameters
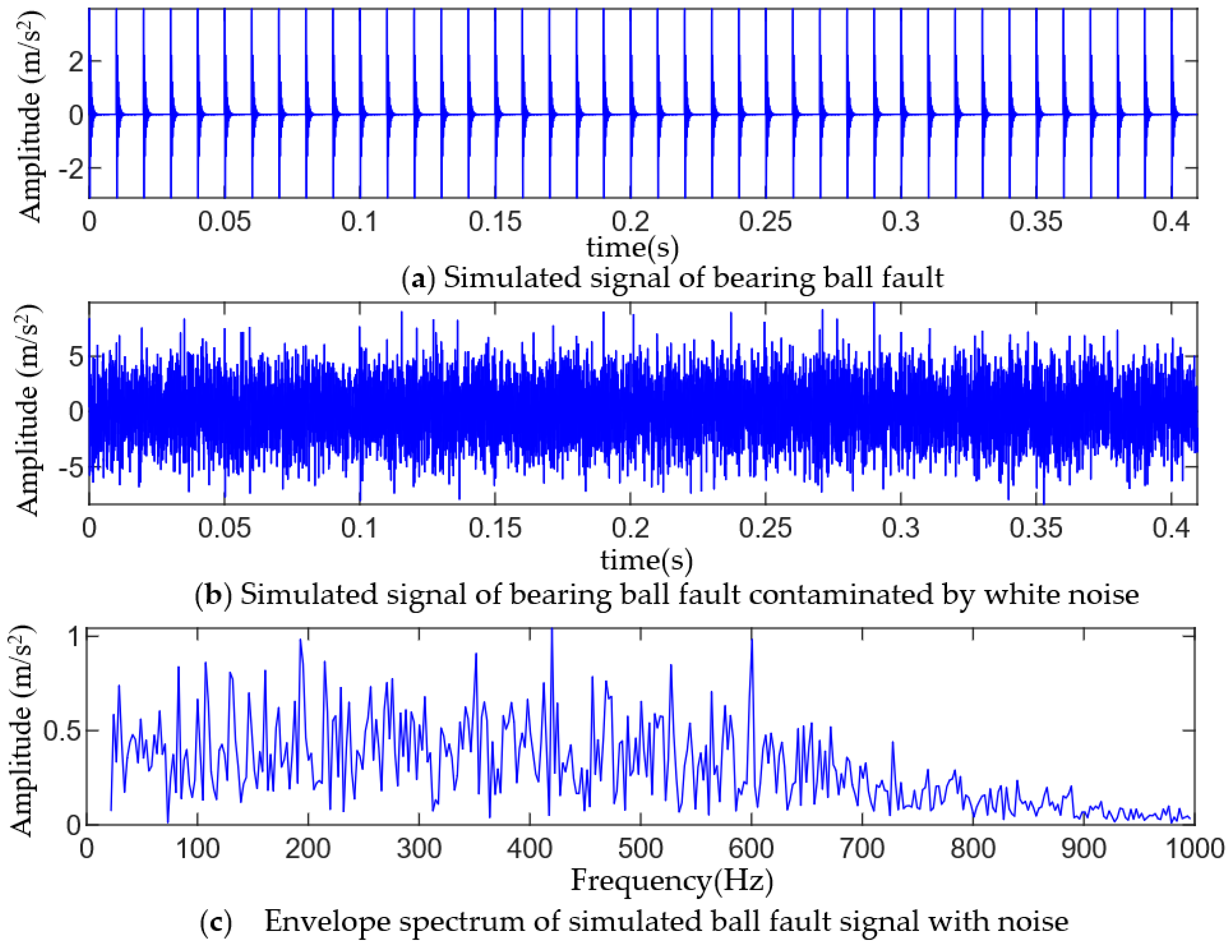
4. Simulation Signal Analysis
5. Measured Signal Analysis
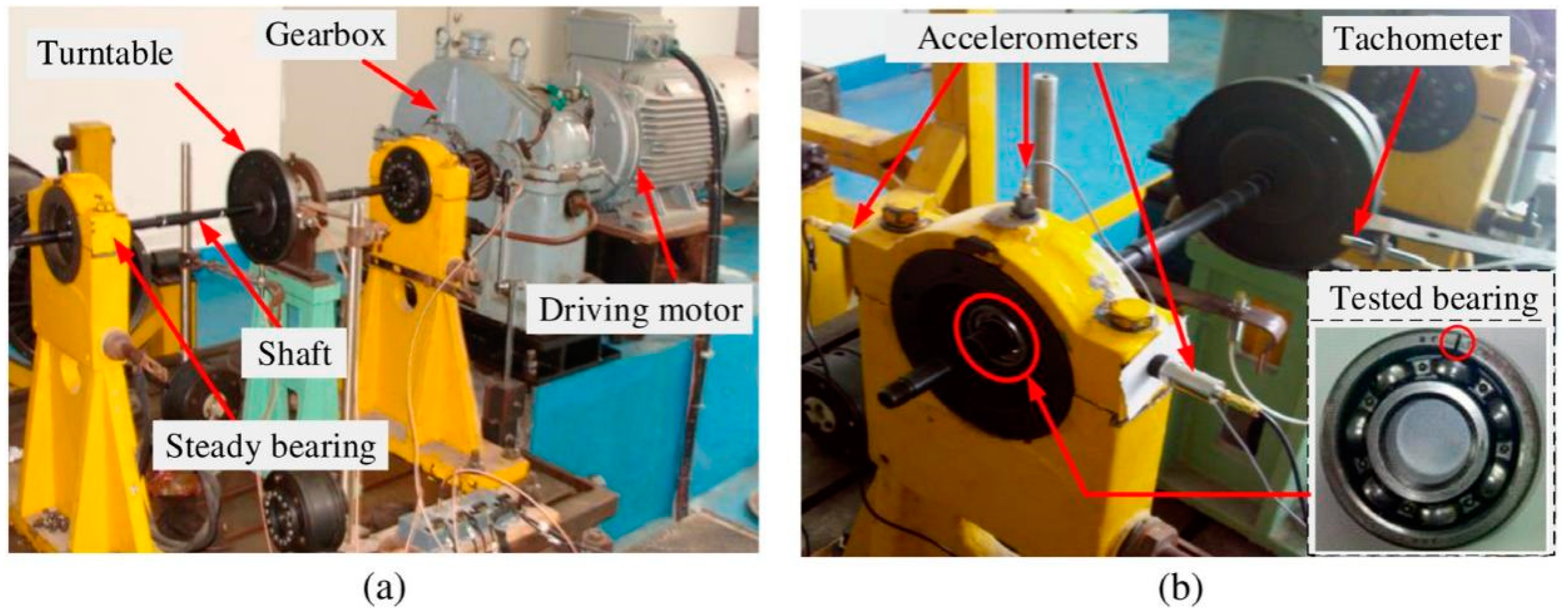
5.1. Introduction of the Experimental Platform
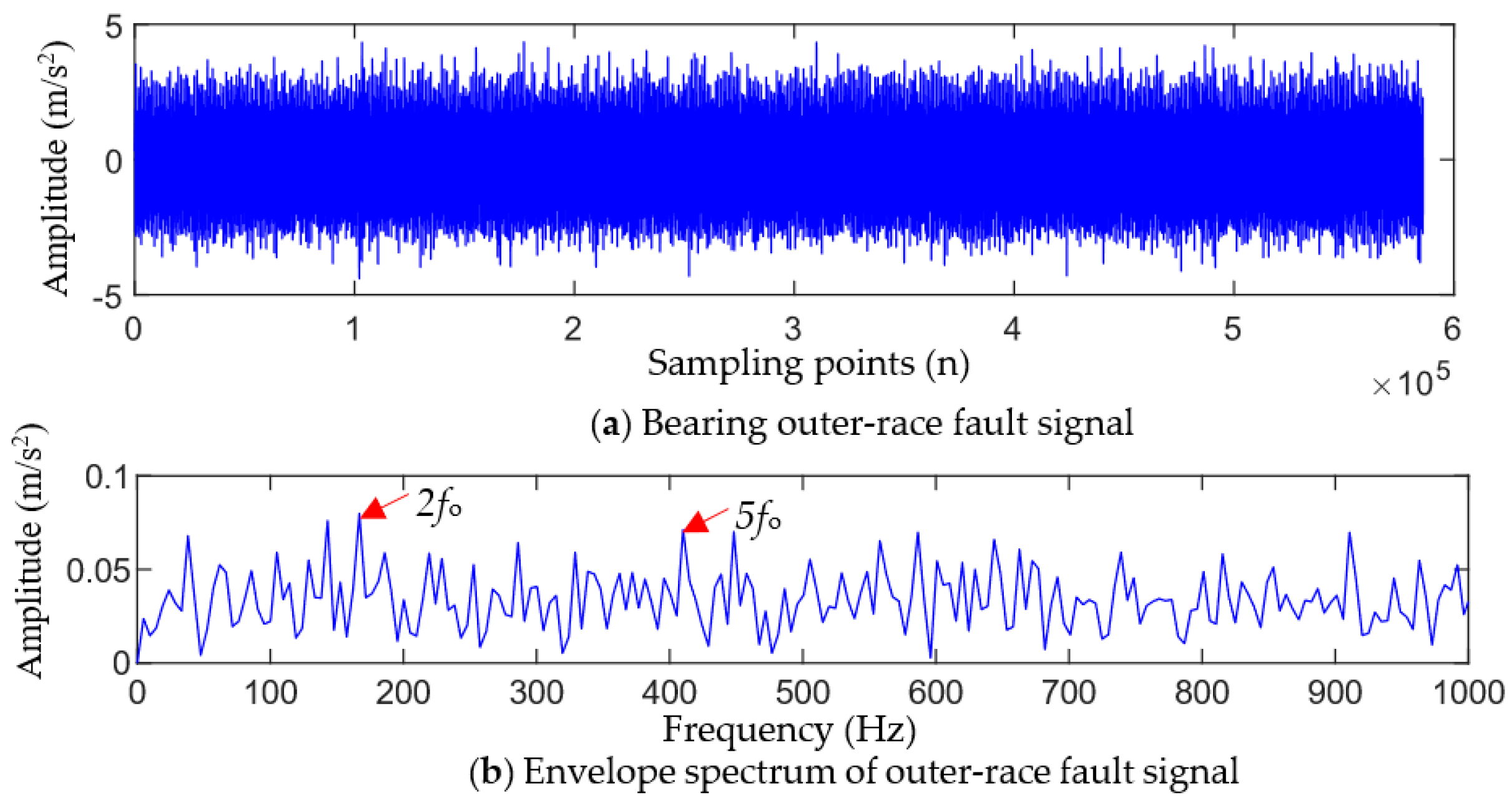
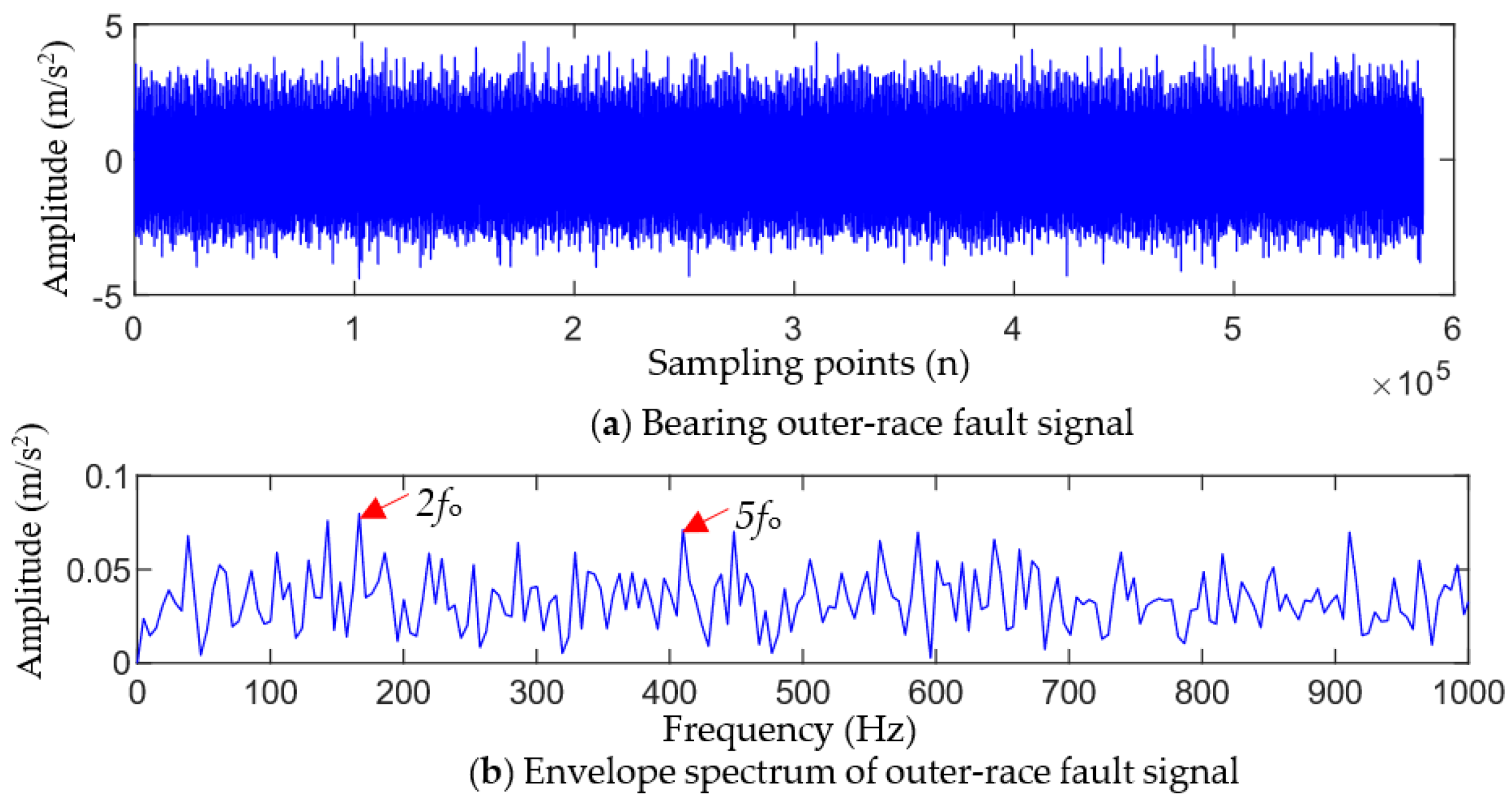
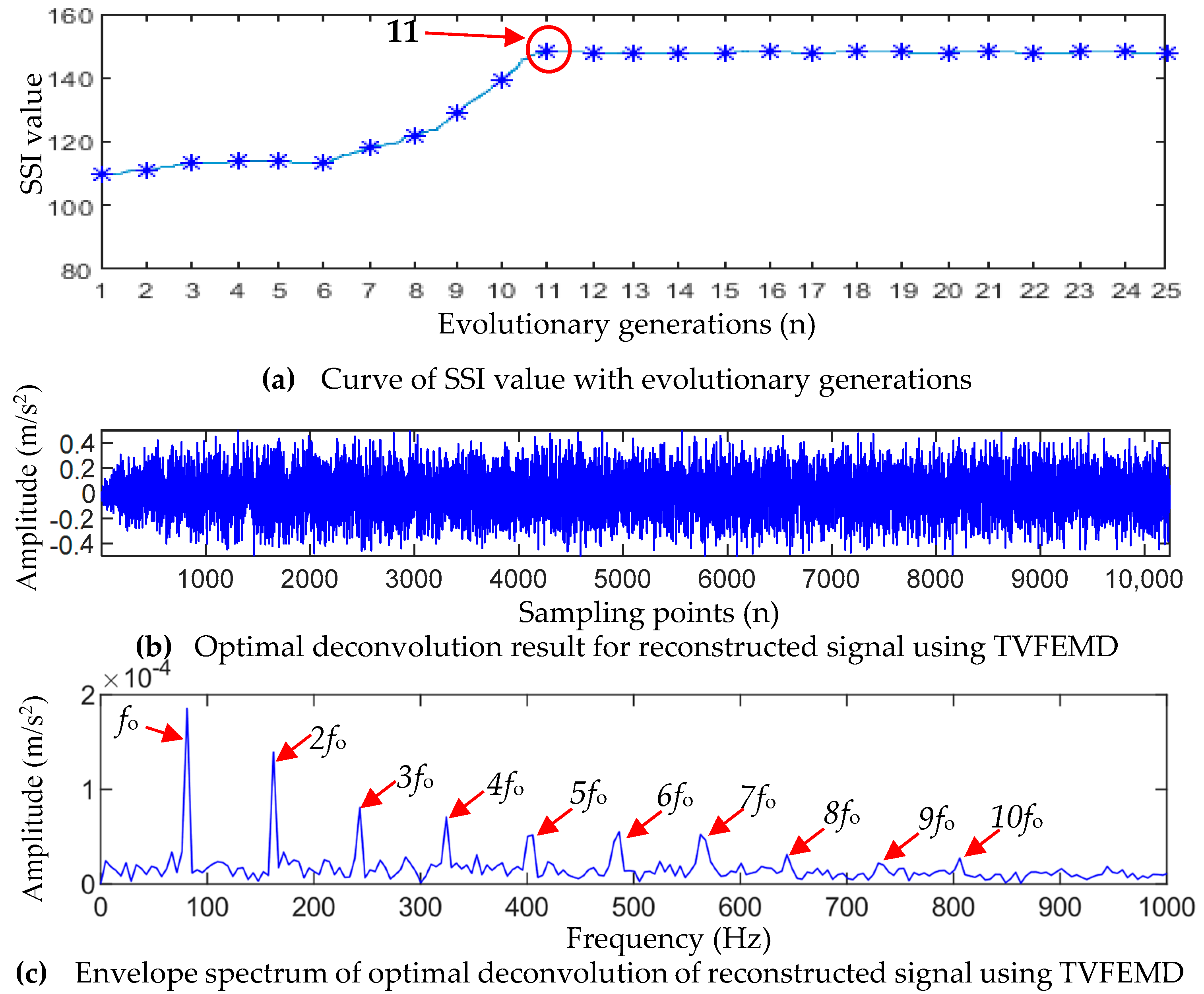
5.2. Analysis of the Bearing Outer Ring Fault Signal
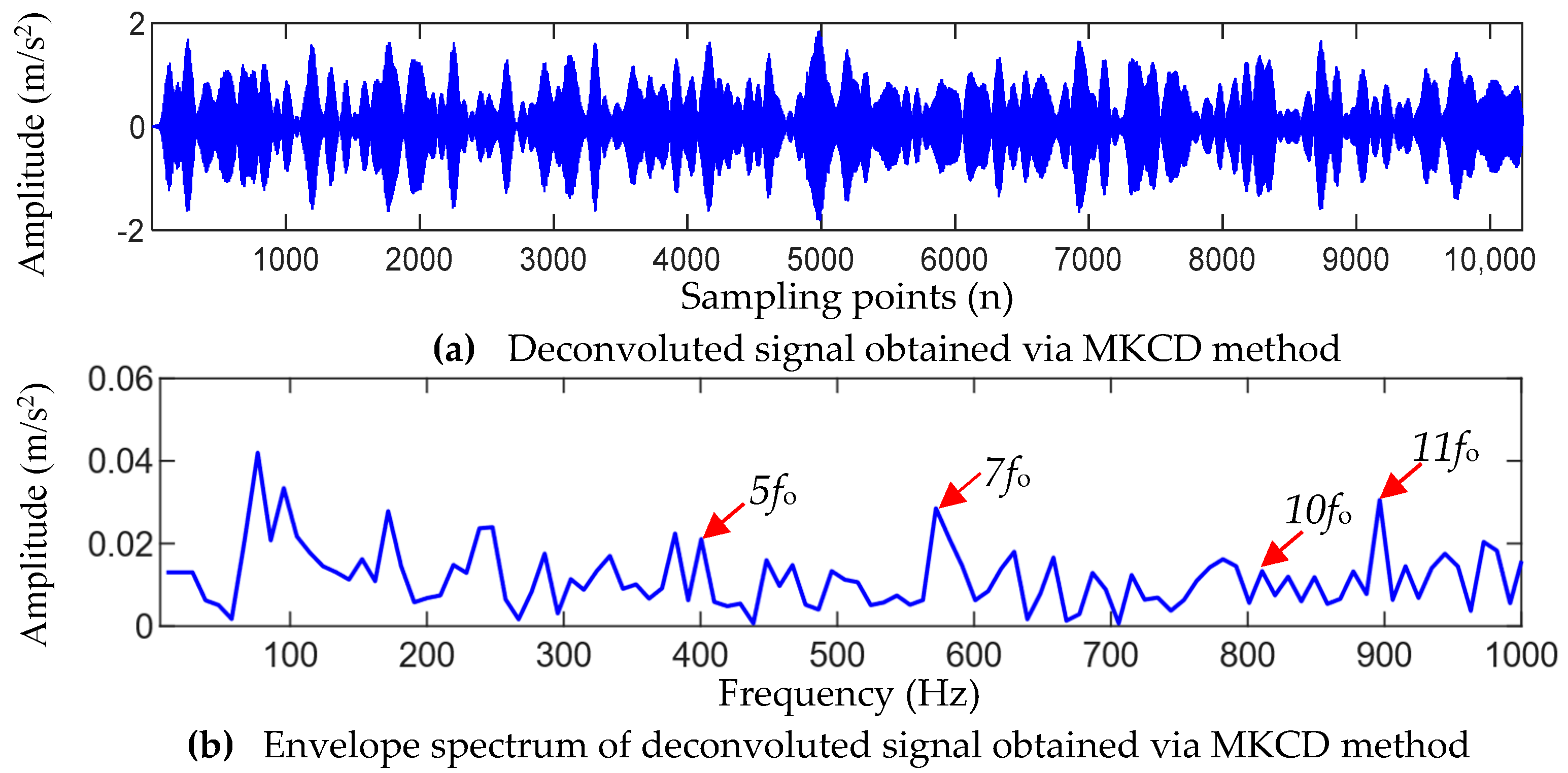
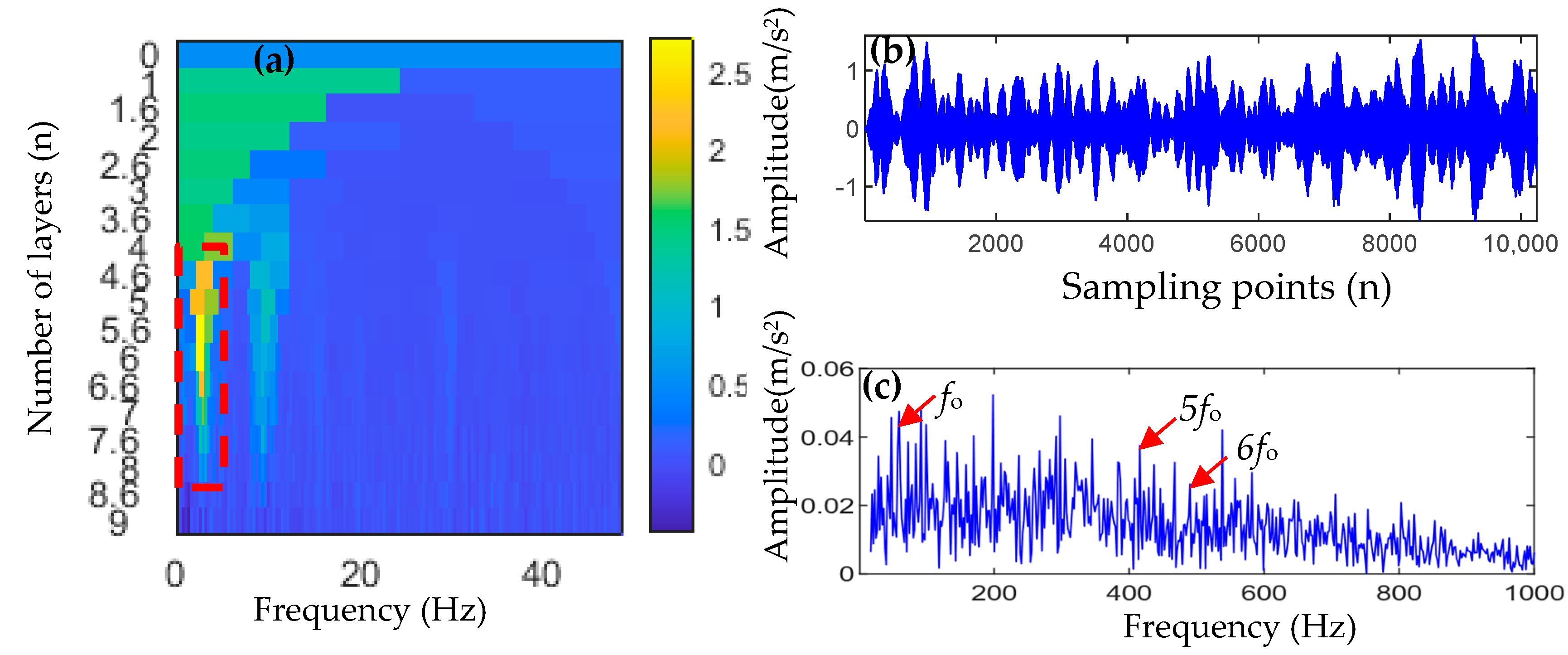
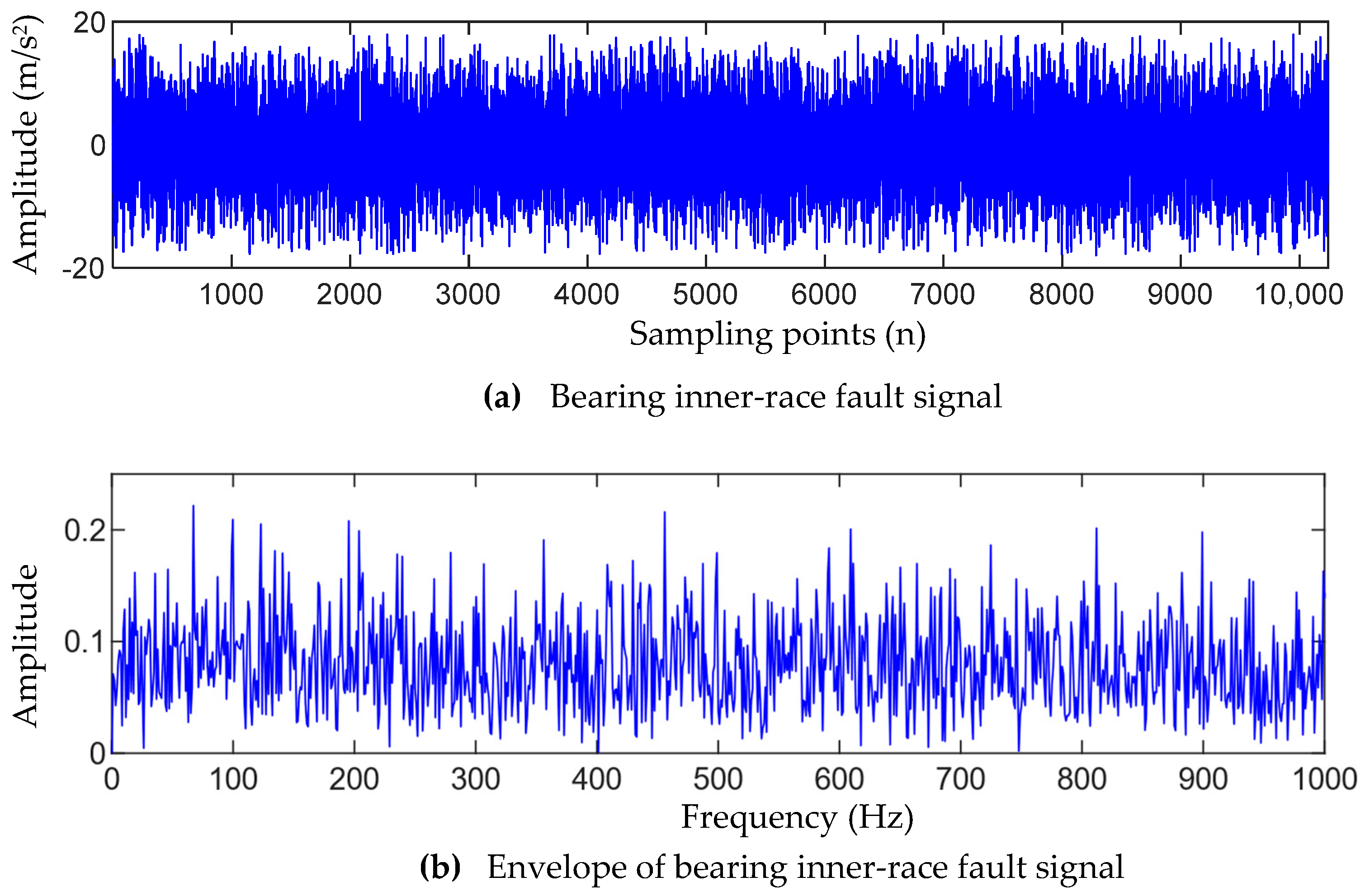
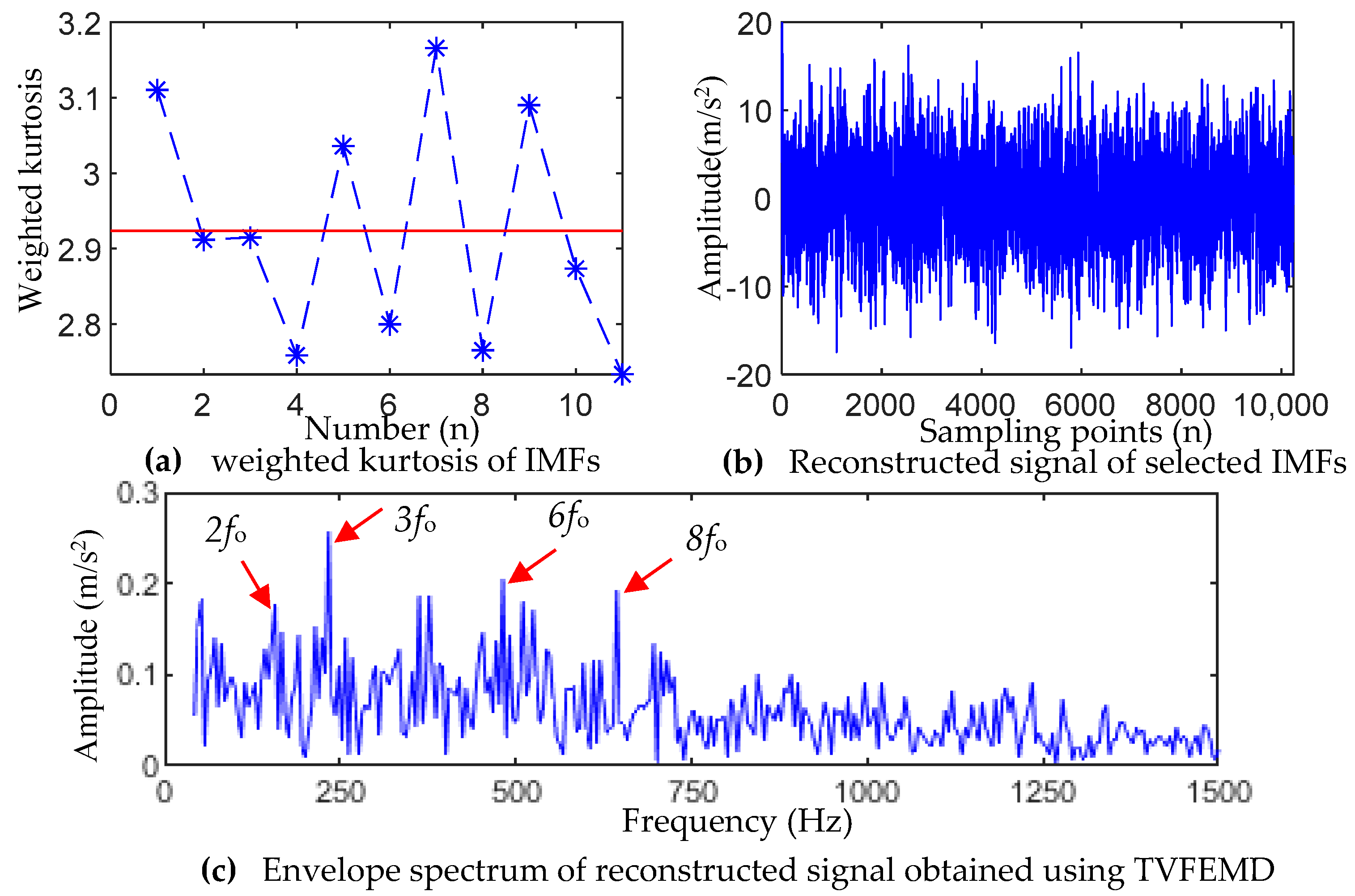
5.3. Bearing Inner-Race Fault Signal Analysis
6. Conclusions
- (1)
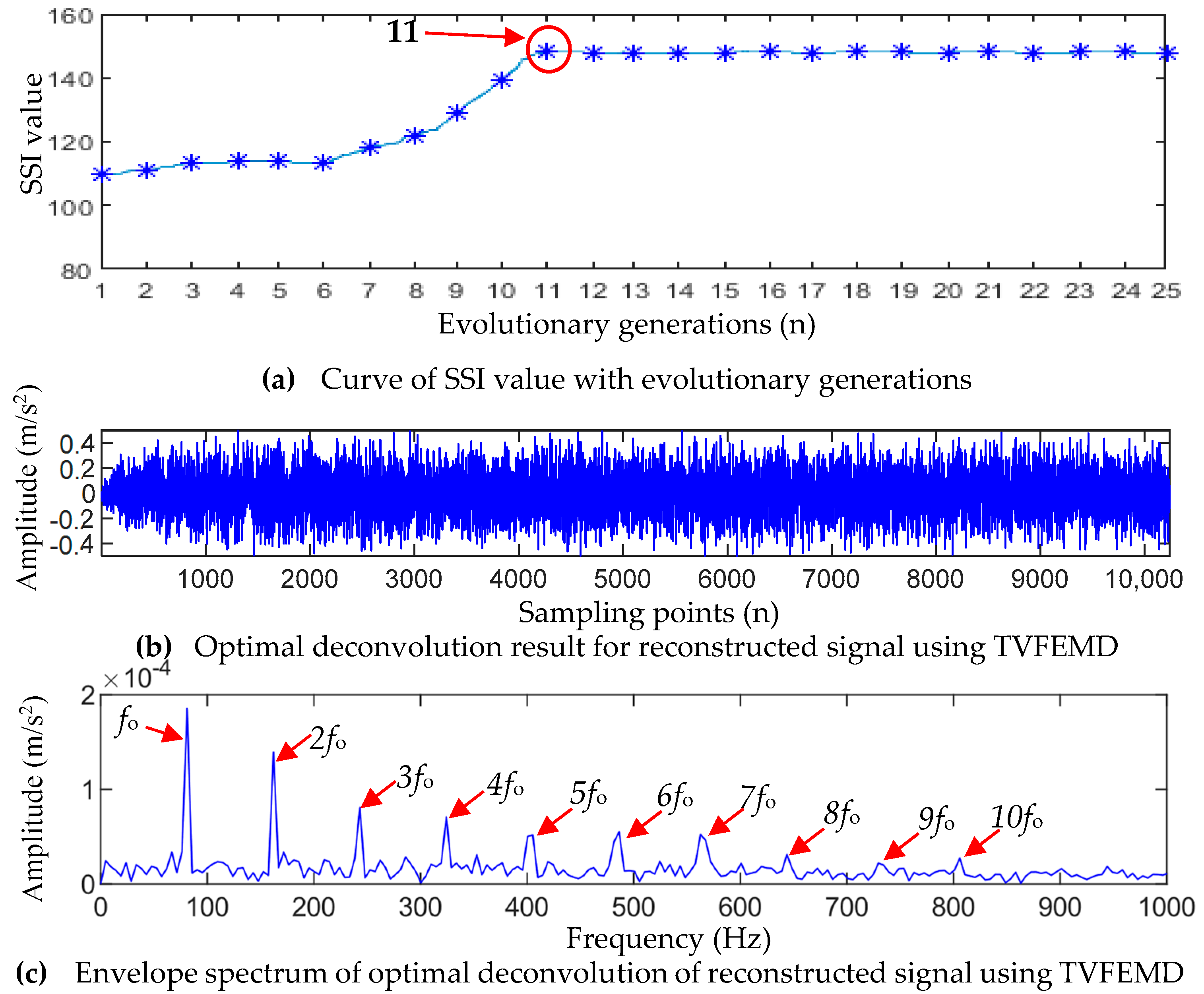
- By constructing a new composite index as the objective function of parameter optimization, the GWOMOMEDA method uses the excellent global search characteristics of the gray wolf optimization algorithm to determine the optimal influence parameters adaptively, which avoids the interference of human subjective factors in parameter selection and achieves optimal deconvolution results.
- (2)
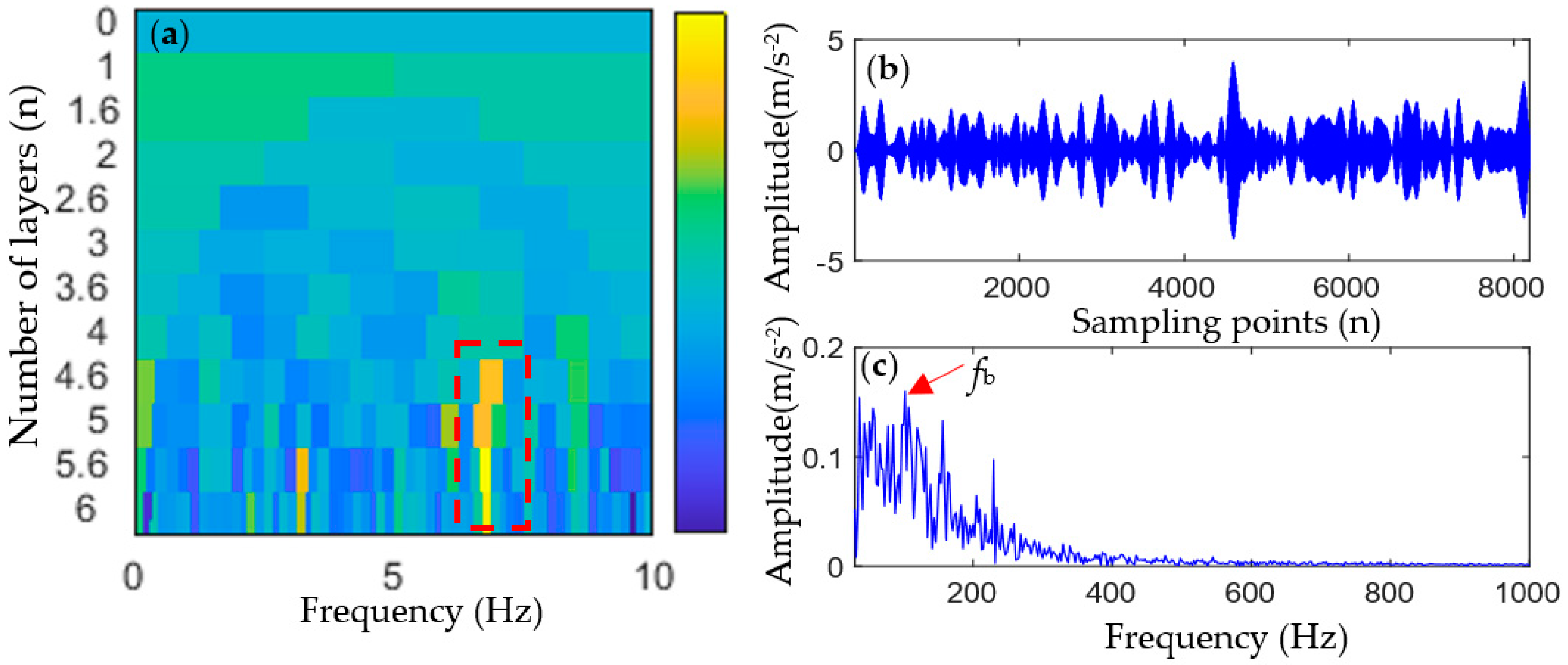
- The bearing early fault impact signal can easily cause modal aliasing, which is difficult to completely separate. The TVFEMD method overcomes the modal aliasing problem of the EMD method and can extract fault features from deconvolution signals well. The TVFEMD decomposition of the fault signal not only solves the problem of mode aliasing after the use of traditional EMD decomposition, but it also maintains the integrity of the fault signal better, which overcomes the shortcomings of other EMD improvement methods.
- (3)
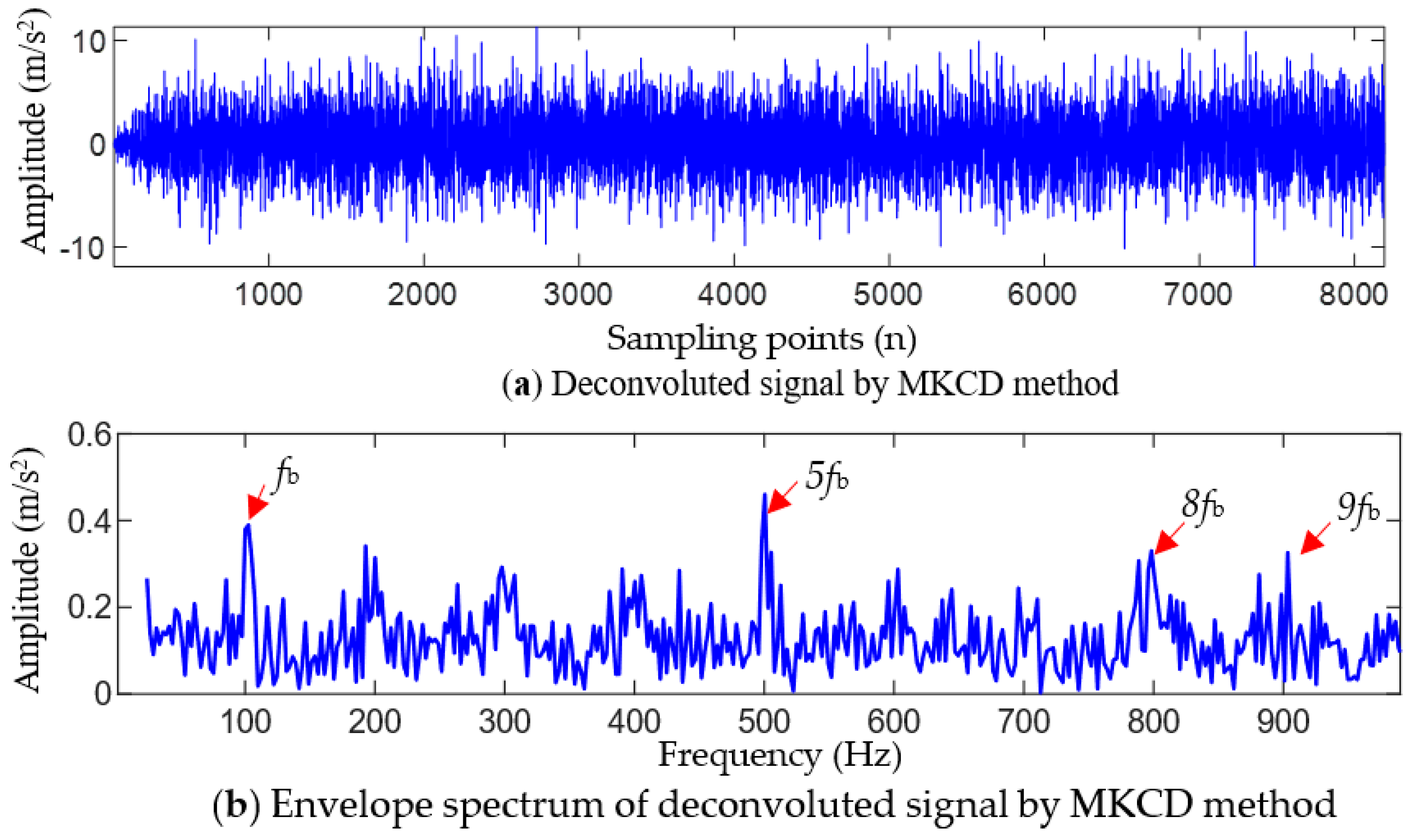
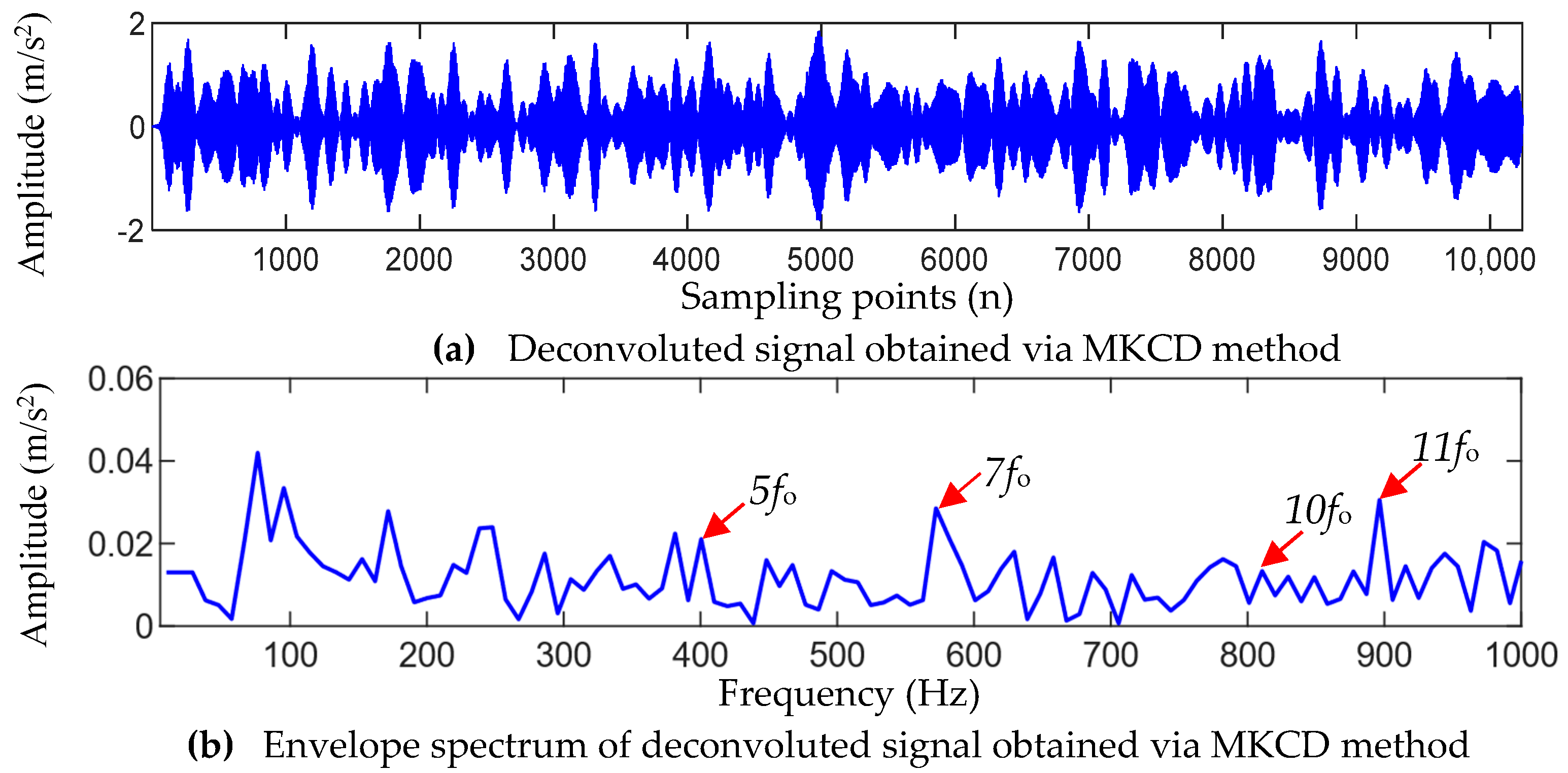
- The parameter-optimized MOMEDA method can significantly reduce the influence of noise on the TVFEMD method, and the effective modal components of the TVFEMD method are selected according to the weighted kurtosis index with higher reliability. Therefore, the combination of the parameter-optimized MOMEDA and TVFEMD methods can realize the accurate extraction of early fault features of rolling bearings, and the effect is better than the traditional MKCD deconvolution method and fast spectral kurtosis FSK class method.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| EMD | empirical mode decomposition |
| TVFEMD | time-varying filtering EMD |
| MOMEDA | multipoint optimal minimum entropy deconvolution adjusted |
| IMF | intrinsic mode function |
| EEMD | ensemble empirical mode decomposition |
| CEEMD | complementary ensemble empirical mode decomposition |
| CEEMDAN | complete ensemble empirical mode decomposition with adaptive noise |
| ESK | envelope spectrum kurtosis |
| MOAF | maximum of autocorrelation function |
| GWO | gray wolf optimizer |
| FSK | fast spectral kurtosis |
| MCKD | maximum correlation kurtosis deconvolution |
| FCK | first-order correlated kurtosis |
| FFC | fault feature coefficient |
| SE | sampling entropy |
| ESE | envelope spectrum entropy |
References
- Wang, T.; Chu, F.; Feng, Z. Meshing frequency modulation index-based kurtogram for planet bearing fault detection. J. Sound Vib. 2018, 432, 437–453. [Google Scholar] [CrossRef]
- Igba, J.; Alemzadeh, K.; Durugbo, C.; Eiriksson, E.T. Analysing RMS and peak values of vibration signals for condition monitoring of wind turbine gearboxes. Renew. Energy 2016, 91, 90–106. [Google Scholar] [CrossRef]
- Liang, K.; Zhao, M.; Lin, J.; Ding, C.; Jiao, J.; Zhang, Z. A novel indicator to improve fast kurtogram for the health monitoring of rolling bearing. IEEE Sens. J. 2020, 20, 12252–12261. [Google Scholar] [CrossRef]
- Li, Y.; Li, H.; Wang, B.; Yu, H.; Wang, W. Research on the feature selection of rolling bearings’ degradation features. Shock Vib. 2019, 2019, 6450719. [Google Scholar] [CrossRef]
- Caesarendra, W.; Tjahjowidodo, T. A review of feature extraction methods in vibration based condition monitoring and Its application for degradation trend estimation of low-speed slew bearing. Machines 2017, 5, 21. [Google Scholar] [CrossRef]
- Laissaoui, A.; Bouzouane, B.; Miloudi, A.; Hamzaoui, N. Perceptive analysis of bearing defects (contribution to vibration monitoring). Appl. Acoust. 2018, 140, 248–255. [Google Scholar] [CrossRef]
- Sassi, S.; Badri, B.; Thomas, M. “TALAF” and “THIKAT” as innovative time domain indicators for tracking ball bearings. In Proceedings of the 24nd Seminar on Machinery Vibration, Canadian Machinery Vibration Association, Montreal, QC, Canada, 25–27 October 2006. [Google Scholar]
- Li, C.; Sanchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault diagnosis for rotating machinery using vibration measurement deep statistical feature learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef]
- Jing, L.; Zidan, X.; Li, Z.; Wennian, Y.; Yimin, S. A statistical feature investigation of the spalling propagation assessment for a ball bearing. Mech. Mach. Theory 2019, 131, 336–350. [Google Scholar]
- Li, Z.; Jiang, Y.; Guo, Q.; Hu, C.; Peng, Z. Multi-dimensional variational mode decomposition for bearing-crack detection in wind turbines with large driving-speed variations. Renew. Energy 2018, 116, 55–73. [Google Scholar] [CrossRef]
- Isham, M.F.; Leong, M.S.; Lim, M.H.; Bin Ahmad, Z.A. Intelligent wind turbine gearbox diagnosis using VMDEA and ELM. Wind Energy 2019, 22, 813–833. [Google Scholar] [CrossRef]
- Hoseinzadeh, M.S.; Khadem, S.E.; Sadooghi, M.S. Quantitative diagnosis for bearing faults by improving ensemble empirical mode decomposition. ISA Trans. 2018, 83, 261–275. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Lin, J.; Li, Y. Modified complementary ensemble empirical mode decomposition and intrinsic mode functions evaluation index for high-speed train gearbox fault diagnosis. J. Sound Vib. 2018, 424, 192–207. [Google Scholar] [CrossRef]
- Cai, G.; Zong, L.; Luo, X.; Hu, X. Research on mill load forecasting based on CEEMDAN cloud model characteristic entropy and LSSVM. Vib. Impact 2019, 38, 128–133. [Google Scholar]
- Li, H.; Li, Z.; Mo, W. A time varying filter approach for empirical mode decomposition. Signal Process 2017, 138, 146–158. [Google Scholar] [CrossRef]
- Ye, X.; Hu, Y.; Shen, J.; Chen, C.; Zhai, G. An Adaptive Optimized TVF-EMD Based on a Sparsity-Impact Measure Index for Bearing Incipient Fault Diagnosis. IEEE Trans. Instrum. Meas. 2021, 70, 3507311. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, F.; Hu, M.; Zhang, L.; Liu, H.; Li, M. A novel denoising algorithm based on TVF-EMD and its application in fault classification of rotating machinery. Measurement 2021, 179, 109337. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q. Multipoint optimal minimum entropy deconvolution and convolution fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2017, 82, 461–477. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Liu, C. Research on bearing fault diagnosis based on spectrum characteristics under strong noise interference. Measurement 2021, 169, 108509. [Google Scholar] [CrossRef]
- Wang, Z.; Du, W.; Wang, J.; Zhou, J.; Han, X.; Zhang, Z.; Huang, L. Research and application of improved adaptive MOMEDA fault diagnosis method. Measurement 2019, 140, 63–75. [Google Scholar] [CrossRef]
- Zhou, C.; Ma, J.; Wu, J.; Feng, Z. A parameter adaptive MOMEDA method based on grasshopper optimization algorithm to extract fault features. Math. Probl. Eng. 2019, 1971, 7182539. [Google Scholar] [CrossRef]
- Xiao, C.; Tang, H.; Ren, Y.; Xiang, J.; Kumar, A. Adaptive MOMEDA based on improved advance-retreat algorithm for fault features extraction of axial piston pump. ISA Trans. 2022, 128, 503–520. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Liu, Z.; Miao, Q.; Wang, L. An optimized time varying filtering based empirical mode decomposition method with grey wolf optimizer for machinery fault diagnosis. J. Sound Vib. 2018, 418, 55–78. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, Z.; Zhang, W.; Huang, G. Particle swarm optimization algorithm to solve the deconvolution problem for rolling element bearing fault diagnosis. ISA Trans. 2019, 90, 244–267. [Google Scholar] [CrossRef]
- Miao, Y.; Zhao, M.; Lin, J.; Lei, Y. AApplication of an improved maximum correlated kurtosis deconvolution method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2017, 92, 173–195. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Z.; Wang, J.; Wang, J. Time–frequency analysis for bearing fault diagnosis using multiple Q-factor Gabor wavelets. ISA Trans. 2019, 87, 225–234. [Google Scholar] [CrossRef] [PubMed]
- Stephan, S.; Konstantinos, C.G. Combining an optimisation-based frequency band identification method with historical data for novelty detection under time-varying operating conditions. Measurement 2021, 169, 108517. [Google Scholar]
- Mirjalili, S.; MirjaLiLi, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Lyu, X.; Hu, Z.; Zhou, H.; Wang, Q. Application of improved MCKD method based on QGA in planetary gear compound fault diagnosis. Measurement 2019, 139, 236–248. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, K. Adaptive Kurtogram and Its application in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2019, 130, 87–107. [Google Scholar] [CrossRef]
- Liu, C.; Tan, J.; Huang, Z. Fault diagnosis of rolling element bearings based on adaptive mode extraction. Machines 2022, 10, 260. [Google Scholar] [CrossRef]
- Cheng, G.; Chen, X.; Li, H.; Li, P.; Liu, H. Study on planetary gear fault diagnosis based on entropy feature fusion of ensemble empirical mode decomposition. Measurement 2016, 91, 140–154. [Google Scholar] [CrossRef]
- Chen, J.; Zi, Y.; He, Z.; Yuan, J. Improved spectral kurtosis with adaptive redundant multiwavelet packet and its applications for rotating machinery fault detection. Meas. Sci. Technol. 2012, 23, 045608. [Google Scholar] [CrossRef]
- Li, Z.; Chen, J.; Zi, Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high speed locomotive. Mech. Syst. Signal Process. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Intelligent Diagnosis and Expert System Institute. Available online: http://ides.nuaa.edu.cn (accessed on 17 May 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Evaluation Index | |||
|---|---|---|---|---|
| FCK/10−4 | FFC/10−2 | SE | ESE | |
| FSK | 0.93 | 1.09 | 1.483 | 1.117 |
| MCKD | 1.13 | 1.42 | 1.391 | 1.105 |
| TVFEMD-MOMEDA(L = 600) | 3.13 | 3.77 | 1.227 | 0.950 |
| TVFEMD-MODEDA(Ts = 50) | 2.16 | 2.95 | 1.275 | 0.986 |
| TVFEMD-GWO-MOMEDA | 5.52 | 6.14 | 1.124 | 0.846 |
| Type | Inner Diameter | Outer Diameter | Pitch Diameter | Ball Diameter | Number of Balls | Angle |
|---|---|---|---|---|---|---|
| ER-12K | 19.05 mm | 47 mm | 42.05 mm | 7.94 mm | 8 | 0 |
| Method | Evaluation Index | |||
|---|---|---|---|---|
| FCK/10−4 | FFC/10−2 | SE | ESE | |
| FSK | 0.83 | 0.41 | 1.7149 | 1.2450 |
| MCKD | 1.94 | 1.02 | 1.7438 | 1.2755 |
| TVFEMD-MOMEDA(L = 600) | 2.97 | 2.29 | 1.5309 | 1.1509 |
| TVFEMD-MODEDA(Ts = 50) | 2.38 | 1.92 | 1.5644 | 1.1774 |
| TVFEMD-GWO-MOMEDA | 4.46 | 3.84 | 1.3392 | 1.0277 |
| Method | Evaluation Index | |||
|---|---|---|---|---|
| FCK/10−4 | FFC/10−2 | SE | ESE | |
| FSK | 1.37 | 1.03 | 1.7726 | 1.3115 |
| MCKD | 1.92 | 1.65 | 1.7953 | 1.3290 |
| TVFEMD-MOMEDA(L = 600) | 3.01 | 2.98 | 1.5861 | 1.1894 |
| TVFEMD-MODEDA(Ts = 50) | 2.77 | 2.29 | 1.5763 | 1.1979 |
| TVFEMD-GWO-MOMEDA | 4.79 | 4.26 | 1.4926 | 1.0752 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, S.; Wang, W. Early Fault Detection of Rolling Bearings Based on Time-Varying Filtering Empirical Mode Decomposition and Adaptive Multipoint Optimal Minimum Entropy Deconvolution Adjusted. Entropy 2023, 25, 1452. https://doi.org/10.3390/e25101452
Song S, Wang W. Early Fault Detection of Rolling Bearings Based on Time-Varying Filtering Empirical Mode Decomposition and Adaptive Multipoint Optimal Minimum Entropy Deconvolution Adjusted. Entropy. 2023; 25(10):1452. https://doi.org/10.3390/e25101452
Chicago/Turabian StyleSong, Shuo, and Wenbo Wang. 2023. "Early Fault Detection of Rolling Bearings Based on Time-Varying Filtering Empirical Mode Decomposition and Adaptive Multipoint Optimal Minimum Entropy Deconvolution Adjusted" Entropy 25, no. 10: 1452. https://doi.org/10.3390/e25101452
APA StyleSong, S., & Wang, W. (2023). Early Fault Detection of Rolling Bearings Based on Time-Varying Filtering Empirical Mode Decomposition and Adaptive Multipoint Optimal Minimum Entropy Deconvolution Adjusted. Entropy, 25(10), 1452. https://doi.org/10.3390/e25101452