
Deriving Three-Outcome Permutationally Invariant Bell Inequalities



Abstract
:1. Introduction
2. Bell Scenario and the Local Polytope
2.1. Multipartite Bell Experiment
2.2. Local Deterministic Strategies and Characterization of the Local Polytope
2.3. Projections onto Low-Dimensional Subspaces
3. Deriving New Multipartite Bell Inequalities
3.1. Inferring Families of 3-Outcome PIBIs
3.2. Data-Driven Derivation of 3-Outcome PIBIs
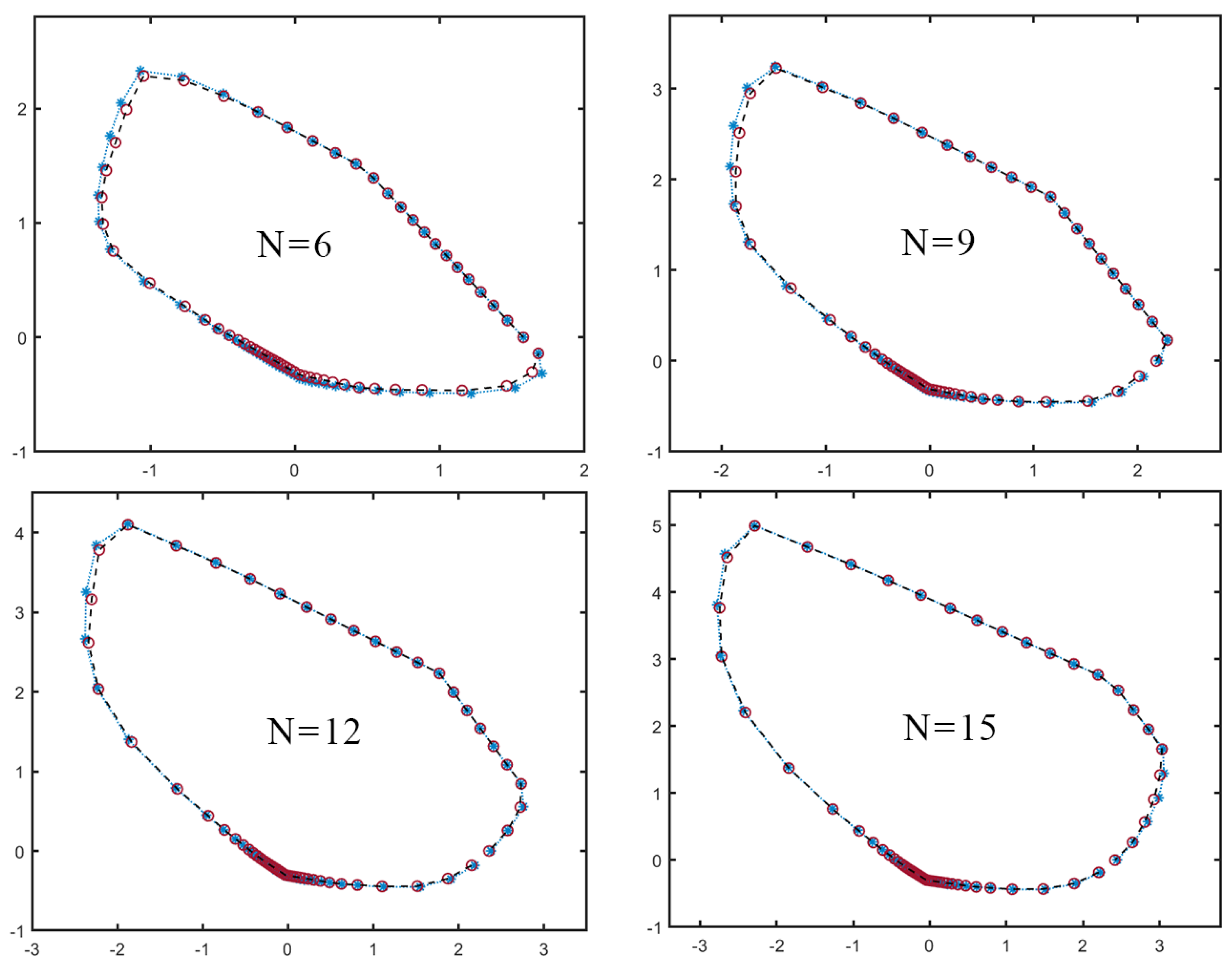
Benchmarking the Outer Approximation against
- 1.
- Select two (random) orthonormal directions in the 14-dimensional space (cf. Equation (11)), defining the plane used to slice the local polytope.
- 2.
- Set as the origin the point inside the local polytope, which corresponds to the probability distribution of maximal entropy with and for all .
- 3.
- Select a direction on the plane parametrized by an angle as , noting that the discretization of need not be uniform to better outline the boundary.
- 4.
- Obtain the boundary points:
- For , find the max feasible along direction by inputting in SdP Equation (24). The term is to obtain the constraint . Then, one finds the boundary point ,
- For , find the max feasible such that can be written as a linear combination of the vertices of . We do so via the following linear program:where is the decision variable with its last element corresponding to , and represents a matrix where the columns of A are the vertices of corresponding to all possible LDS configurations as outlined in Table 2. Then, one obtains the boundary point .
- 5.
- We repeat steps 3 and 4 for several values of until a full sweep across the plane has been completed.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brunner, N.; Cavalcanti, D.; Pironio, S.; Scarani, V.; Wehner, S. Bell nonlocality. Rev. Mod. Phys. 2014, 86, 419. [Google Scholar] [CrossRef]
- Frérot, I.; Fadel, M.; Lewenstein, M. Probing quantum correlations in many-body systems: A review of scalable methods. Rep. Progress Phys. 2023, 86, 114001. [Google Scholar] [CrossRef] [PubMed]
- Bell, J.S. On the einstein podolsky rosen paradox. Physics 1964, 1, 195. [Google Scholar] [CrossRef]
- Clauser, J.F.; Horne, M.A.; Shimony, A.; Holt, R.A. Proposed Experiment to Test Local Hidden-Variable Theories. Phys. Rev. Lett. 1969, 23, 880. [Google Scholar] [CrossRef]
- Babai, L.; Fortnow, L.; Lund, C. Non-deterministic exponential time has two-prover interactive protocols. Comput. Complex. 1991, 1, 3. [Google Scholar] [CrossRef]
- Gühne, O.; Toth, G.; Hyllus, P.; Briegel, H.J. Bell inequalities for graph states. Phys. Lett. 2005, 95, 120405. [Google Scholar] [CrossRef] [PubMed]
- Tóth, G.; Gühne, O.; Briegel, H.J. Two-setting Bell inequalities for graph states. Phys. Rev. A—At. Mol. Opt. Phys. 2006, 73, 022303. [Google Scholar] [CrossRef]
- Santos, R.; Saha, D.; Baccari, F.; Augusiak, R. Scalable Bell inequalities for graph states of arbitrary prime local dimension and self-testing. New J. Phys. 2023, 25, 063018. [Google Scholar] [CrossRef]
- Hein, M.; Eisert, J.; Briegel, H.J. Multiparty entanglement in graph states. Phys. Rev. A—At. Mol. Opt. Phys. 2004, 69, 062311. [Google Scholar] [CrossRef]
- Augusiak, R.; Salavrakos, A.; Tura, J.; Acin, A. Bell inequalities tailored to the Greenberger-Horne-Zeilinger states of arbitrary local dimension. New J. Phys. 2019, 21, 113001. [Google Scholar] [CrossRef]
- Sarkar, S.; Augusiak, R. Self-testing of multipartite Greenberger-Horne-Zeilinger states of arbitrary local dimension with arbitrary number of measurements per party. Phys. Rev. A 2022, 105, 032416. [Google Scholar] [CrossRef]
- Makuta, O.; Augusiak, R. Self-testing maximally-dimensional genuinely entangled subspaces within the stabilizer formalism. New J. Phys. 2021, 23, 043042. [Google Scholar] [CrossRef]
- Baccari, F.; Augusiak, R.; Supić, I.; Acin, A. Scalable bell inequalities for qubit graph states and robust self-testing. Phys. Rev. Lett. 2020, 125, 260507. [Google Scholar] [CrossRef]
- Designolle, S.; Vértesi, T.; Pokutta, S. Symmetric multipartite Bell inequalities via Frank-Wolfe algorithms. Phys. Rev. A 2024, 109, 022205. [Google Scholar] [CrossRef]
- Gilbert, E.G. An iterative procedure for computing the minimum of a quadratic form on a convex set. SIAM J. Control 1966, 4, 61. [Google Scholar] [CrossRef]
- Plodzień, M.; Lewenstein, M.; Witkowska, E.; Chwedenczuk, J. One-axis twisting as a method of generating many-body Bell correlations. Phys. Rev. Lett. 2022, 129, 250402. [Google Scholar] [CrossRef] [PubMed]
- Plodzien, M.; Chwedericzuk, J.; Lewenstein, M. Inherent quantum resources in the stationary spin chains. arXiv 2024, arXiv:2405.16974. [Google Scholar]
- Plodzień, M.; Wasak, T.; Witkowska, E.; Lewenstein, M.; Chwedenczuk, J. Generation of scalable many-body Bell correlations in spin chains with short-range two-body interactions. Phys. Rev. Res. 2024, 6, 023050. [Google Scholar] [CrossRef]
- Chwedenczuk, J. Many-body Bell inequalities for bosonic qubits. SciPost Phys. Core 2022, 5, 025. [Google Scholar] [CrossRef]
- Mermin, N.D. Quantum mysteries revisited. Phys. Rev. Lett. 1990, 65, 1838. [Google Scholar] [CrossRef]
- Belinskii, A.; Klyshko, D.N. Interference of light and Bell’s theorem. Physics-Uspekhi 1993, 36, 653. [Google Scholar] [CrossRef]
- Aolita, L.; Gallego, R.; Cabello, A.; Acin, A. Fully nonlocal quantum correlations. Phys. Lett. 2012, 108, 10040. [Google Scholar] [CrossRef] [PubMed]
- Navascués, M.; Singh, S.; Acín, A. Connector tensor networks: A renormalization-type approach to quantum certification. Phys. Rev. X 2020, 10, 021064. [Google Scholar] [CrossRef]
- Hu, M.; Vallée, E.; Seynnaeve, T.; Emonts, P.; Tura, J. Characterizing Translation-Invariant Bell Inequalities using Tropical Algebra and Graph Polytopes. arXiv 2024, arXiv:2407.08783. [Google Scholar]
- Hu, M.; Tura, J. Tropical contraction of tensor networks as a Bell inequality optimization toolset. arXiv 2022, arXiv:2208.02798. [Google Scholar]
- Tura, J.; Sainz, A.B.; Vértesi, T.; Acin, A.; Lewenstein, M.; Augusiak, R. Translationally invariant multipartite Bell inequalities involving only two-body correlators. J. Phys. A Math. Theor. 2014, 47, 424024. [Google Scholar] [CrossRef]
- Wang, Z.; Singh, S.; Navascués, M. Entanglement and nonlocality in infinite 1D systems. Phys. Rev. Lett. 2017, 118, 230401. [Google Scholar] [CrossRef]
- Wang, Z.; Navascués, M. Two-dimensional translation-invariant probability distributions: Approximations, characterizations and no-go theorems. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20170822. [Google Scholar] [CrossRef]
- Tura, J.; Augusiak, R.; Sainz, A.B.; Vértesi, T.; Lewen-stein, M.; Acin, A. Detecting nonlocality in many-body quantum states. Science 2014, 344, 1256. [Google Scholar] [CrossRef]
- Wagner, S.; Schmied, R.; Fadel, M.; Treutlein, P.; San-gouard, N.; Bancal, J.-D. Bell Correlations in a Many-Body System with Finite Statistics. Phys. Rev. Lett. 2017, 119, 170403. [Google Scholar] [CrossRef]
- Baccari, F.; Tura, J.; Fadel, M.; Aloy, A.; Bancal, J.-D.; Sangouard, N.; Lewenstein, M.; Acin, A.; Augusiak, R. Bell correlation depth in many-body systems. Phys. Rev. A 2019, 100, 022121. [Google Scholar] [CrossRef]
- Fadel, M.; Hernandez-Cuenca, S. Symmetrized holographic entropy cone. Phys. Rev. D 2022, 105, 086008. [Google Scholar] [CrossRef]
- Guo, J.; Tura, J.; He, Q.; Fadel, M. Detecting Bell Correlations in Multipartite Non-Gaussian Spin States. Phys. Rev. Lett. 2023, 131, 070201. [Google Scholar] [CrossRef] [PubMed]
- Bancal, J.-D.; Gisin, N.; Pironio, S. Looking for symmetric Bell inequalities. J. Phys. A Math. Theor. 2010, 43, 385303. [Google Scholar] [CrossRef]
- Bancal, J.-D.; Branciard, C.; Brunner, N.; Gisin, N.; Liang, Y.-C. A framework for the study of symmetric full-correlation Bell-like inequalities. J. Phys. A Math. Theor. 2012, 45, 125301. [Google Scholar] [CrossRef]
- Fadel, M.; Tura, J. Bell correlations at finite temperature. Quantum 2018, 2, 107. [Google Scholar] [CrossRef]
- Piga, A.; Aloy, A.; Lewenstein, M.; Frérot, I. Bell Correlations at Ising Quantum Critical Points. Phys. Rev. Lett. 2019, 123, 170604. [Google Scholar] [CrossRef]
- Fröwis, F.; Fadel, M.; Treutlein, P.; Gisin, N.; Brunner, N. Does large quantum Fisher information imply Bell correlations? Phys. Rev. A 2019, 99, 040101. [Google Scholar] [CrossRef]
- Schmied, R.; Bancal, J.-D.; Allard, B.; Fadel, M.; Scarani, V.; Treutlein, P.; Sangouard, N. Bell correlations in a Bose-Einstein condensate. Science 2016, 352, 441. [Google Scholar] [CrossRef]
- Engelsen, N.J.; Krishnakumar, R.; Hosten, O.; Kasevich, M.A. Bell correlations in spin-squeezed states of 500,000 atoms. Phys. Rev. Lett. 2017, 118, 140401. [Google Scholar] [CrossRef]
- Alsina, D.; Cervera, A.; Goyeneche, D.; Latorre, J.I.; Zyczkowski, K. Operational approach to Bell inequalities: Application to qutrits. Phys. Rev. A 2016, 94, 032102. [Google Scholar] [CrossRef]
- Müller-Rigat, G.; Aloy, A.; Lewenstein, M.; Frèrot, I. Inferring Nonlinear Many-Body Bell Inequalities From Average Two-Body Correlations: Systematic Approach for Arbitrary Spin-j Ensembles. PRX Quantum 2021, 2, 030329. [Google Scholar] [CrossRef]
- Lipkin, H.; Meshkov, N.; Glick, A. Validity of many-body approximation methods for a solvable model: (I). Exact solutions and perturbation theory. Nuclear Phys. 1965, 62, 188. [Google Scholar] [CrossRef]
- Meshkov, N.; Glick, A.; Lipkin, H. Validity of many-body approximation methods for a solvable model: (II). Linearization procedures. Nuclear Phys. 1965, 62, 199. [Google Scholar] [CrossRef]
- Glick, A.; Lipkin, H.; Meshkov, N. Validity of many-body approximation methods for a solvable model: (III). Diagram summations. Nuclear Phys. 1965, 62, 211. [Google Scholar] [CrossRef]
- Meredith, D.C.; Koonin, S.E.; Zirnbauer, M.R. Quantum chaos in a schematic shell model. Phys. Rev. A 1988, 37, 3499. [Google Scholar] [CrossRef]
- Law, C.K.; Pu, H.; Bigelow, N.P. Quantum spins mixing in spinor Bose-Einstein condensates. Phys. Rev. Lett. 1998, 81, 5257. [Google Scholar] [CrossRef]
- Haldane, F.D.M. Continuum dynamics of the 1-D Heisenberg antiferromagnet: Identification with the O(3) nonlinear sigma model. Phys. Lett. A 1983, 93, 464. [Google Scholar] [CrossRef]
- Haldane, F.D.M. “Fractional statistics” in arbitrary dimensions: A generalization of the Pauli principle. Phys. Rev. Lett. 1983, 50, 1153. [Google Scholar] [CrossRef]
- Affleck, I.; Kennedy, T.; Lieb, E.H.; Tasaki, H. Rigorous results on valence-bond ground states in antiferromagnets. Phys. Rev. Lett. 1987, 59, 799. [Google Scholar] [CrossRef]
- Gnutzmann, S.; Haake, F.; Kus, M. Quantum chaos of SU3 observables. J. Phys. A Math. Gen. 1999, 33, 143. [Google Scholar] [CrossRef]
- Hamley, C.D.; Gerving, C.S.; Hoang, T.M.; Bookjans, E.M.; Chapman, M.S. Spin-nematic squeezed vacuum in a quantum gas. Nat. Phys. 2012, 8, 305. [Google Scholar] [CrossRef]
- Kitzinger, J.; Meng, X.; Fadel, M.; Ivannikov, V.; Nemoto, K.; Munro, W.J.; Byrnes, T. Bell correlations in a split two-mode-squeezed Bose-Einstein condensate. Phys. Rev. 2021, A104, 043323. [Google Scholar] [CrossRef]
- Luo, X.-Y.; Zou, Y.-Q.; Wu, L.-N.; Liu, Q.; Han, M.-F.; Tey, M.K.; You, L. Deterministic entanglement generation from driving through quantum phase transitions. Science 2017, 355, 620. [Google Scholar] [CrossRef]
- Fine, A. Hidden Variables, Joint Probability, and the Bell Inequalities. Phys. Rev. Lett. 1982, 48, 291. [Google Scholar] [CrossRef]
- Chazelle, B. Cutting hyperplanes for divide-and-conquer. Discret. Comput. Geom. 1993, 10, 377. [Google Scholar] [CrossRef]
- Pitowsky, I.; Svozil, K. Optimal tests of quantum nonlocality. Phys. Rev. A 2001, 64, 014102. [Google Scholar] [CrossRef]
- Tura, J.; Augusiak, R.; Sainz, A.; Lücke, B.; Klempt, C.; Lewenstein, M.; Acín, A. Nonlocality in many-body quantum systems detected with two-body correlators. Ann. Phys. 2015, 362, 370. [Google Scholar] [CrossRef]
- Fukuda, K. cdd/cdd+ Reference Manual. Inst. Oper. Res. ETH-Zentrum 1997, 91, 111. [Google Scholar]
- Aloy, A.; Müller-Rigat, G.; Lewenstein, M.; Tura, J.; Fadel, M. Bell inequalities as a tool to probe quantumchaos. arXiv 2024, arXiv:2406.11791. [Google Scholar] [CrossRef]
- Müller-Rigat, G.; Aloy, A.; Lewenstein, M.; Fadel, M.; Tura, J. Three-outcome multipartite bell inequal-ities: Applications to dimnension witnessing and spin-nematic squeezing in many-body systems. arXiv 2024, arXiv:2406.12823. [Google Scholar] [CrossRef]
- Aloy, A.; Fadel, M.; Tura, J. The quantum marginal problem for symmetric states: Applications to variational optimization, nonlocality and self-testing. New J. Phys. 2021, 23, 033026. [Google Scholar] [CrossRef]
- Fadel, M.; Tura, J. Bounding the Set of Classical Correlations of a Many-Body System. Phys. Rev. Lett. 2017, 119, 230402. [Google Scholar] [CrossRef] [PubMed]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming; Version 2.1; CVX: San Ramon, CA, USA, 2014; Available online: http://cvxr.com/cvx (accessed on 23 September 2024).
- Skrzypczyk, P.; Cavalcanti, D. Semidefinite Programming in Quantum Information Science; IOP Publishing: Bristol, UK, 2023; pp. 2053–2563. [Google Scholar] [CrossRef]
- Tavakoli, A.; Pozas-Kerstjens, A.; Brown, P.; Araujo, M. Semidefinite programming relaxations for quantum correlations. arXiv 2023, arXiv:2307.02551. [Google Scholar]
- Lasserre, J.B. Moments, Positive Polynomials and Their Applications; Imperial College Press: London, UK, 2009; Available online: https://www.ebook.de/de/product/27808945/jean_bernard_lasserre_moments_positive_polynomials_and_their_applications.html (accessed on 23 September 2024).
- Gouveia, J.; Parrilo, P.A.; Thomas, R.R. Theta bodies for polynomial ideals. SIAM J. Opt. 2010, 20, 2097. [Google Scholar] [CrossRef]
- Gouveia, J.; Thomas, R.R. Semidefinite Optimization and Conver Algebraic Geometry; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2012; pp. 293–340. [Google Scholar] [CrossRef]
- Alt, H.W. An Application-oriented Introduction. In Linear Functional Analysis; Springer: London, UK, 2016. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| LDS Label | (0|0) | (1|0) | (2|0) | (0|1) | (1|1) | (2|1) |
|---|---|---|---|---|---|---|
| # 0 | 1 | 0 | 0 | 1 | 0 | 0 |
| # 1 | 1 | 0 | 0 | 0 | 1 | 0 |
| # 2 | 1 | 0 | 0 | 0 | 0 | 1 |
| # 3 | 0 | 1 | 0 | 1 | 0 | 0 |
| # 4 | 0 | 1 | 0 | 0 | 1 | 0 |
| # 5 | 0 | 1 | 0 | 0 | 0 | 1 |
| # 6 | 0 | 0 | 1 | 1 | 0 | 0 |
| # 7 | 0 | 0 | 1 | 0 | 1 | 0 |
| # 8 | 0 | 0 | 1 | 0 | 0 | 1 |
| 3PIBI Label | ||||||
|---|---|---|---|---|---|---|
| # 1 | 1 | 1 | 0 | −2 | 0 | 0 |
| # 2 | 1 | 1 | −2 | −2 | 2 | 0 |
| # 3 | −2 | 1 | 2 | 2 | 0 | 4 |
| # 4 | −6 | 1 | 4 | 4 | 2 | 12 |
| # 5 | −6 | 1 | 4 | 0 | 0 | 24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aloy, A.; Müller-Rigat, G.; Tura, J.; Fadel, M. Deriving Three-Outcome Permutationally Invariant Bell Inequalities. Entropy 2024, 26, 816. https://doi.org/10.3390/e26100816
Aloy A, Müller-Rigat G, Tura J, Fadel M. Deriving Three-Outcome Permutationally Invariant Bell Inequalities. Entropy. 2024; 26(10):816. https://doi.org/10.3390/e26100816
Chicago/Turabian StyleAloy, Albert, Guillem Müller-Rigat, Jordi Tura, and Matteo Fadel. 2024. "Deriving Three-Outcome Permutationally Invariant Bell Inequalities" Entropy 26, no. 10: 816. https://doi.org/10.3390/e26100816