



Simultaneously Transmitting and Reflecting Reconfigurable Intelligent Surfaces Empowered Cooperative Rate Splitting with User Relaying †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
- We propose a novel downlink STAR RIS-aided CRS transmission framework, empowering a STAR RIS to assist both the direct and cooperative transmission phases of CRS. Within this framework, we investigate six different transmission modes including various combinations of CRS relaying protocols (HD and FD) and STAR RIS operating protocols (ES, MS, and TS).
- We formulate a new resource allocation problem with the objective of maximizing the minimum user rate. To solve this problem, the STAR RIS passive beamforming, the BS active beamforming, common rate allocation, and time slot allocation (in HD or TS protocols) are jointly optimized under the transmit power constraint at the BS and the energy conservation constraints at the STAR RIS. Due to the non-convexity of the formulated problem, we propose an alternative optimization (AO) algorithm to solve the problem. This approach involves decomposing the original problem into two subproblems: the STAR RIS passive beamforming optimization and transmit active beamforming optimization. Each subproblem is then solved using a successive convex approximation (SCA)-based method. Through iterative solving of the two subproblems, we attain a near-optimal solution until convergence.
- We further propose a low-complexity algorithm to solve the formulated problem. For the passive beamforming design, we derive a closed-form solution for the STAR RIS passive beamforming based on the gradient descent approach. To ensure the derived solution meets the STAR RIS constraints, we further use the symmetric unitary projection based on singular value decomposition (SVD) to project the solution into the feasible set of constraints. To transmit active beamforming, we use the zero-forcing (ZF) approach to fix the beamforming direction. Subsequently, we simply optimize the power allocation using SCA. Apart from perfect channel state information at the transmitter (CSIT), we also extend the two proposed algorithms to address the ergodic rates (ERs) optimization problems under imperfect CSIT.
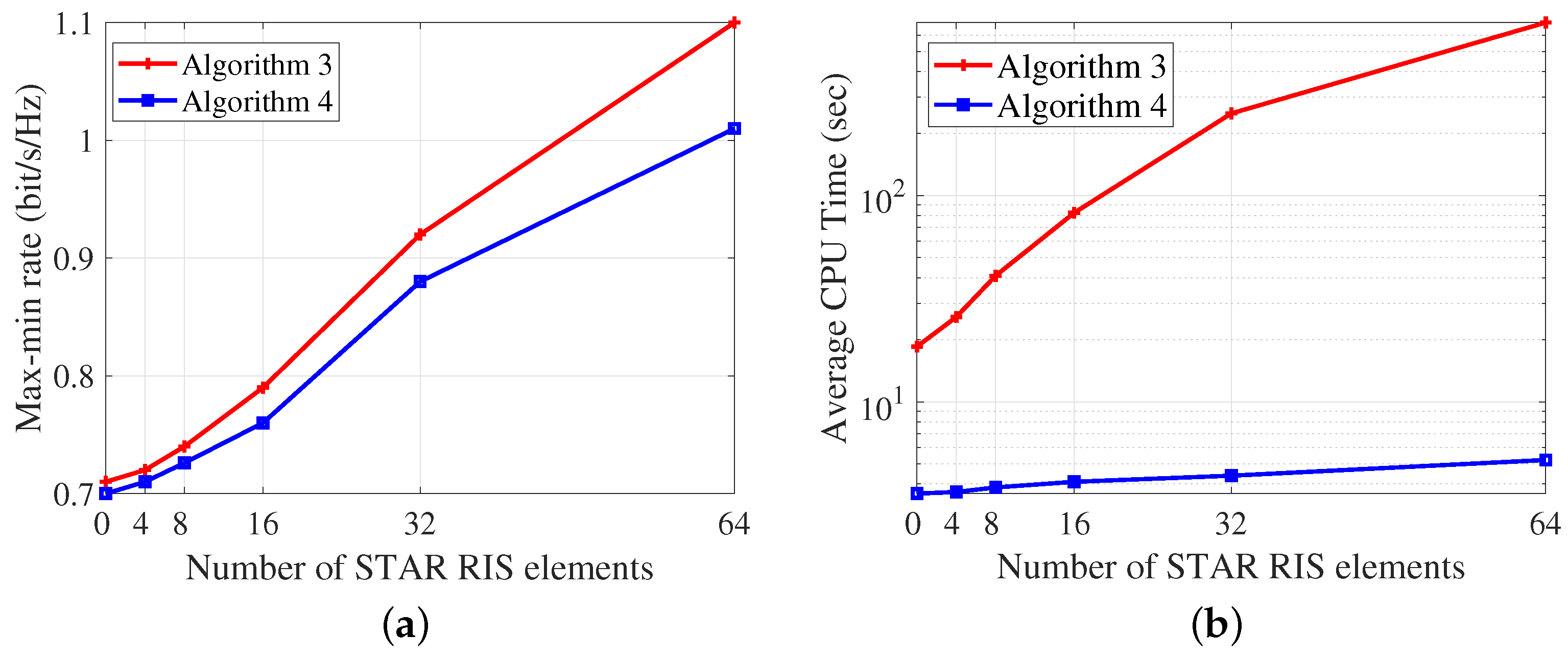
- We evaluate the performance of the proposed STAR RIS-aided CRS framework and show the effectiveness of our proposed algorithms by numerical results. Our analysis reveals that the STAR RIS-aided CRS scheme outperforms other STAR RIS-aided MA schemes. We also offer insights into the preferred regions for the six proposed transmission protocols. Moreover, the results demonstrate that our proposed low-complexity algorithm achieves comparable performance while significantly reducing CPU time compared to the AO algorithm.
1.3. Organization
2. System Model and Problem Formulation
2.1. Transmission Modes of STAR RIS-Empowered CRS
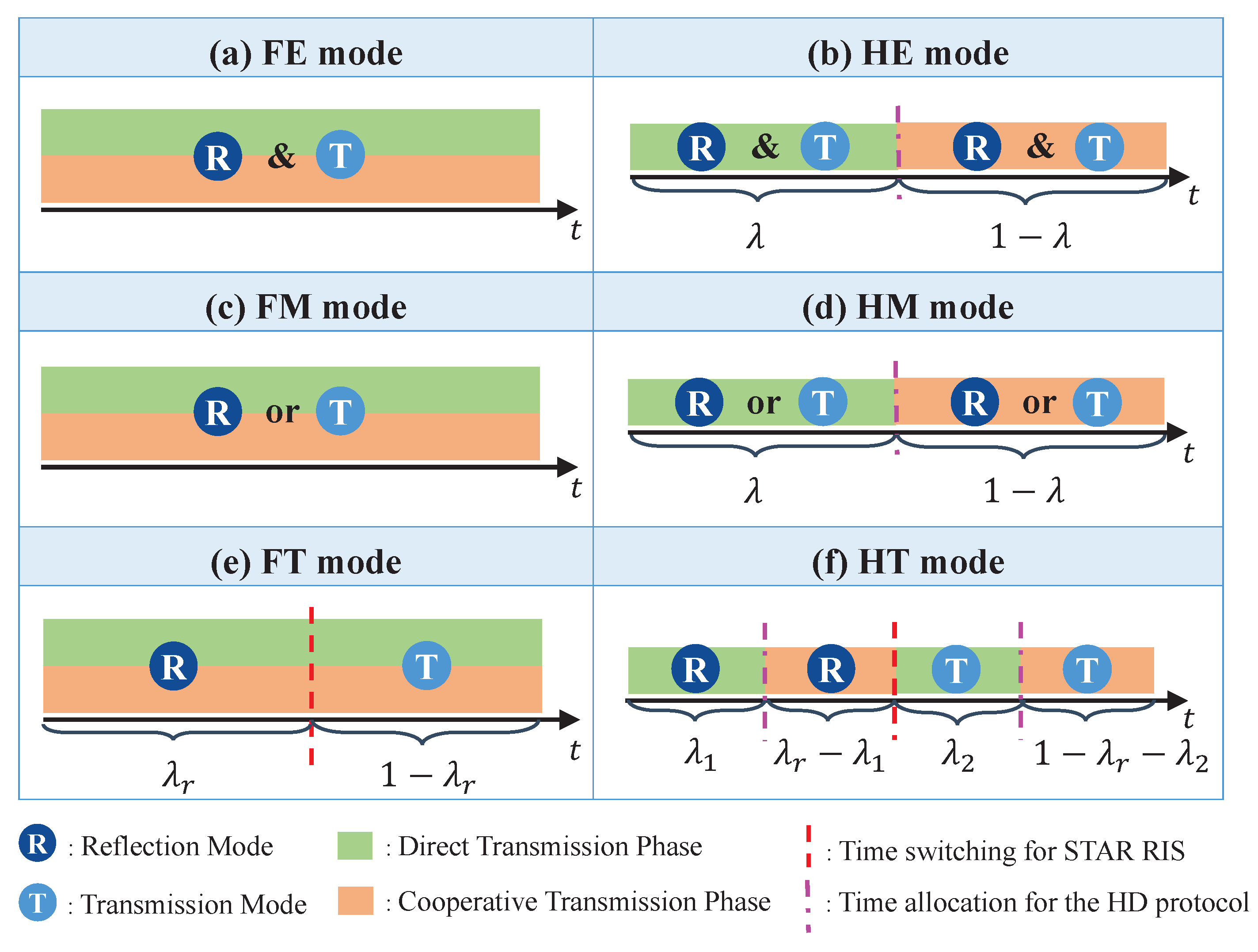
- FD-ES (FE) mode: This refers to the use of the FD protocol for CRS and the ES protocol for the STAR RIS. As illustrated in Figure 2a, FE enables each element of the STAR RIS to operate in both transmission and reflection modes simultaneously in the non-orthogonal direct and cooperative transmission phases.
- HD-ES (HE) mode: This refers to the use of the HD protocol for CRS and the ES protocol for STAR RIS. As illustrated in Figure 2b, HE enables each element of the STAR RIS to operate in both transmission and reflection modes simultaneously in the orthogonal direct and cooperative transmission phases.
- FD-MS (FM) mode: This refers to the use of the FD protocol for CRS and the MS protocol for STAR RIS. As illustrated in Figure 2c, FM enables each element of the STAR RIS to operate in either transmission or reflection mode in the non-orthogonal direct and cooperative transmission phases.
- HD-MS (HM) mode: This refers to the use of the HD protocol for CRS and the MS protocol for the STAR RIS. As illustrated in Figure 2d, HM enables each element of the STAR RIS to operate in either transmission or reflection mode in the orthogonal direct and cooperative transmission phases.
- FD-TS (FT) mode: This refers to the use of the FD protocol for CRS and the TS protocol for the STAR RIS. As illustrated in Figure 2e, each transmission block is split into two time slots based on (). FT facilitates all elements of the STAR RIS to function in the reflection mode during the initial portion of the time, while they operate in the transmission mode during the subsequent portion of the time, across the non-orthogonal direct and cooperative transmission phases.
- HD-TS (HT) mode: This refers to the use of the HD protocol for CRS and the TS protocol for the STAR RIS. As illustrated in Figure 2f, each transmission block is split into two time slots based on : one for the reflection mode and the other for the transmission mode of STAR RIS. Then, each time slot is further split into two orthogonal parts for the direct and cooperative transmission phases of CRS, resulting in a total of four orthogonal transmission slots. Here, we introduce () and () to represent the time allocation between the two transmission phases in the reflection and transmission modes, respectively.
2.2. Transmit Signal Model
2.2.1. Direct Transmission Phase
2.2.2. Cooperative Transmission Phase
2.3. Received Signal Model for FD-Based Transmission Modes
2.3.1. FE/FM
2.3.2. FT
2.4. Received Signal Model for HD-Based Transmission Modes
2.4.1. HE/HM
2.4.2. HT
2.5. Problem Formulation
2.5.1. FE
2.5.2. FM
2.5.3. FT
2.5.4. HE
2.5.5. HM
2.5.6. HT
3. Proposed Optimization Frameworks
3.1. Proposed AO Algorithm
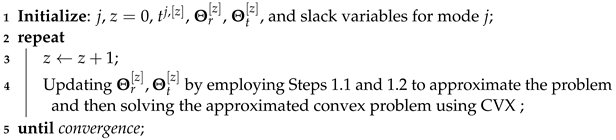
3.1.1. STAR RIS Passive Beamforming Optimization
- Step 1.1: The SCA method for non-convex SINRs:
- Step 1.2: The penalty method for non-convex STAR RIS constraints:
| Algorithm 1: STAR RIS passive beamforming optimization algorithm for six transmission modes |
 |
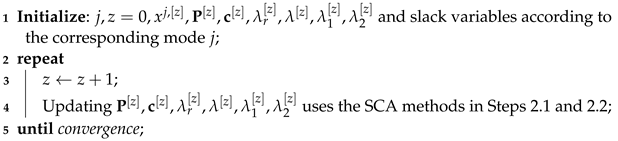
3.1.2. Joint Optimization of the Active Beamforming, Common Rate and Time Allocation
- Step 2.1: The SCA method for time allocation variables:
- Step 2.2: The SCA method for non-convex SINRs:
| Algorithm 2: Joint transmit active beamforming and resource allocation algorithm |
 |
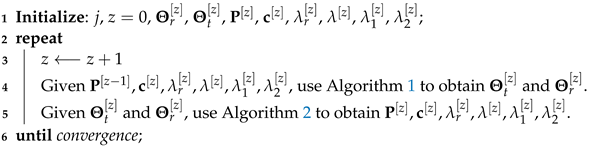
3.1.3. Alternative Optimization
| Algorithm 3: Proposed AO algorithm |
 |
3.2. Proposed Low-Complexity Algorithm
3.2.1. STAR RIS Passive Beamforming Optimization
3.2.2. Joint Optimization of the Active Beamforming, Common Rate and Time Allocation
| Algorithm 4: Proposed low-complexity algorithm |
|
3.3. Convergence and Computational Complexity Analysis
3.3.1. Convergence Analysis
3.3.2. Computational Complexity of Algorithm 3
3.3.3. Computational Complexity of Algorithm 4
3.4. Imperfect CSIT
4. Numerical Results
4.1. Simulation Setting
- CRS-FE/FM/FT/HE/HM/HT: This refers to the STAR RIS-assisted CRS for six different transmission modes, as we proposed in Section 2.
- RSMA-ES: This refers to the existing STAR RIS-assisted RSMA transmission scheme without user relaying [16]. Here we only consider the ES protocol since it is more general than the MS and TS protocols.
- SDMA-ES: This refers to the existing STAR RIS-assisted SDMA transmission scheme. Again, we only consider the ES protocol.
- NOMA-ES: This refers to the existing STAR RIS assisted NOMA transmission scheme [29] with the ES protocol.
- RSMA: This refers to the conventional one-layer RSMA transmission scheme, which does not involve user relaying or assistance from STAR RIS [2].
4.2. Simulation Results
4.2.1. Comparison Among STAR RIS Operating Protocols
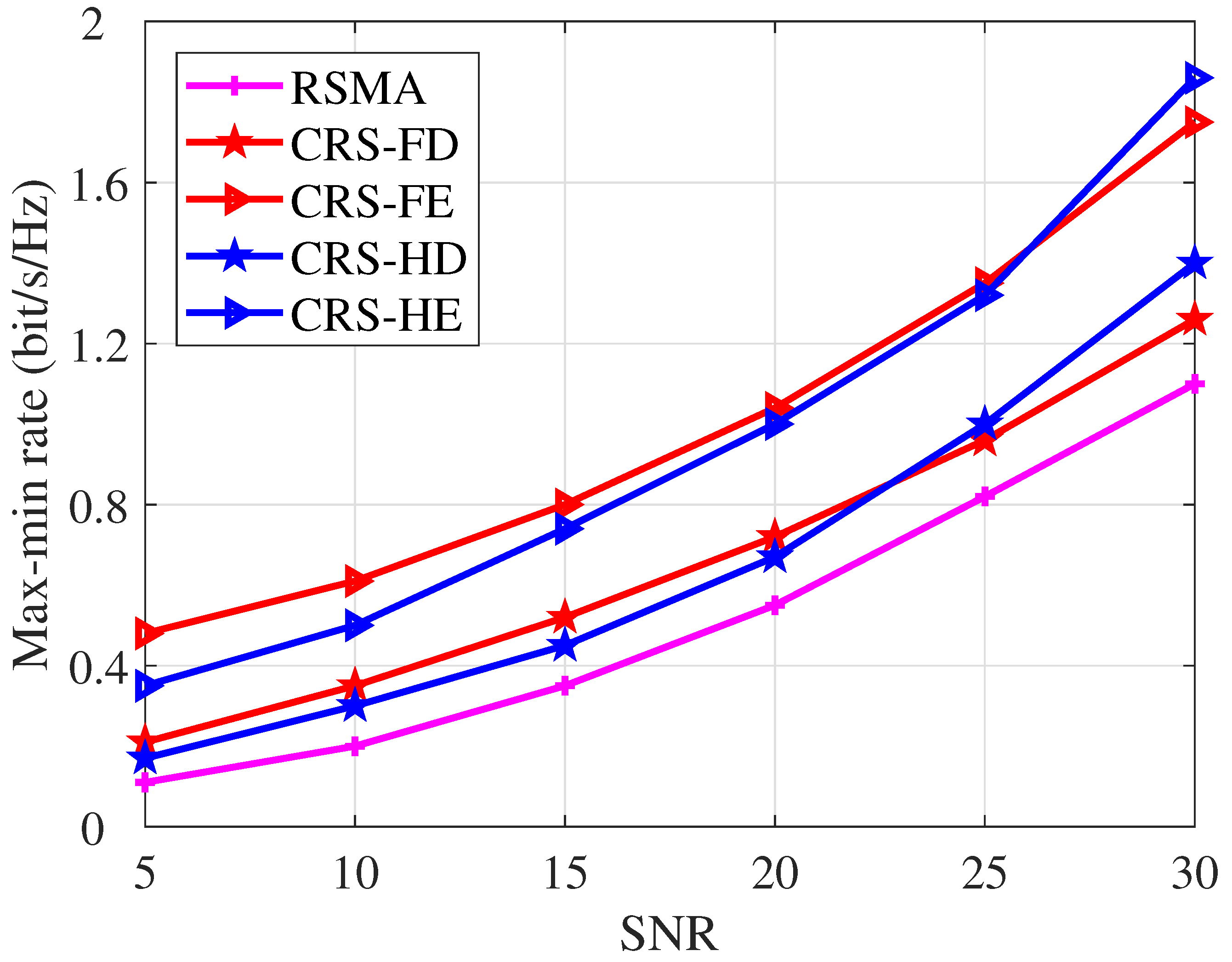
4.2.2. Comparison Between FD and HD Relaying Protocols
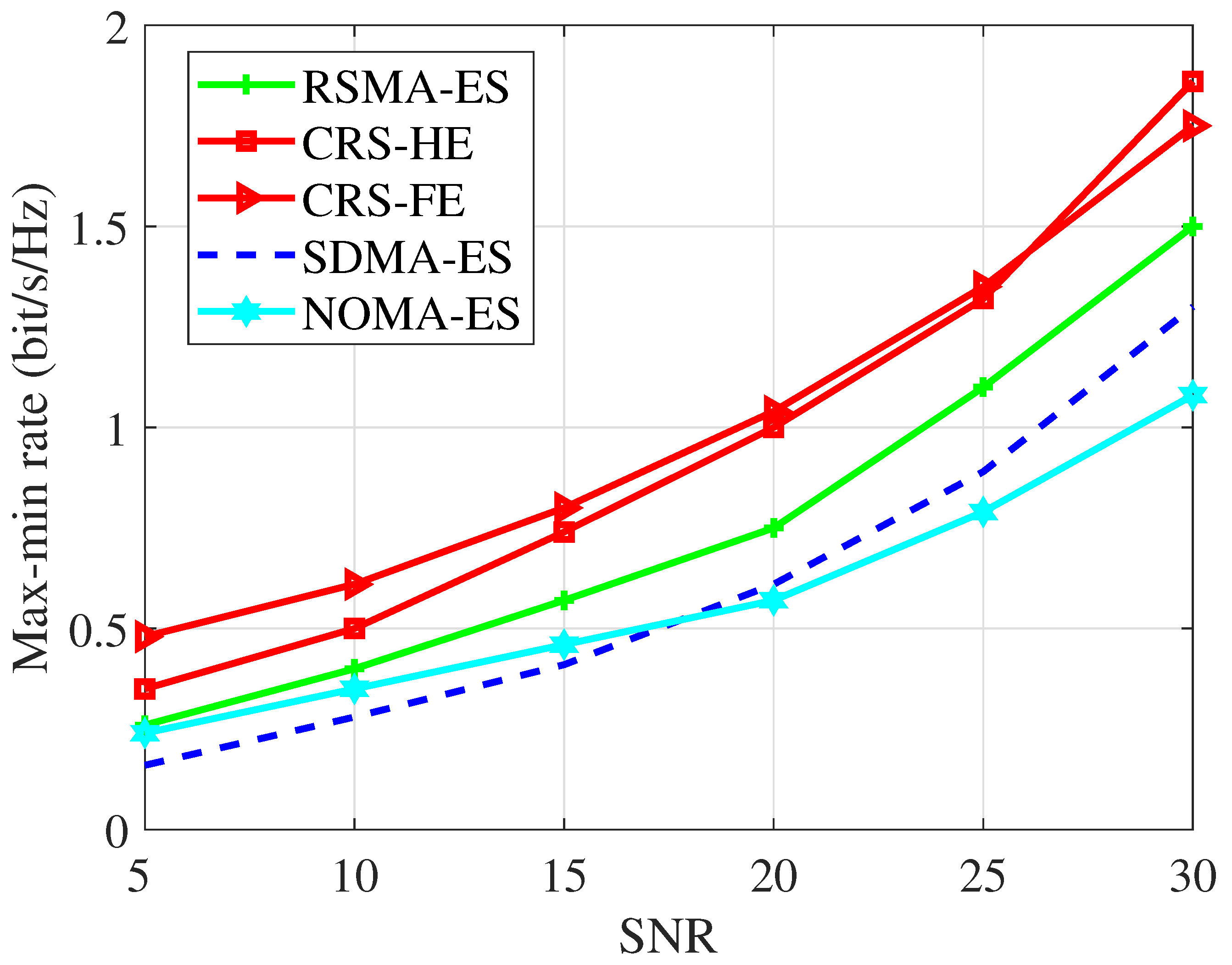
4.2.3. Comparison Among Different MA Schemes
4.2.4. Comparison Between the Two Proposed Algorithms
4.2.5. Imperfect CSIT
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Clerckx, B.; Mao, Y.; Jorswieck, E.A.; Yuan, J.; Love, D.J.; Erkip, E.; Niyato, D. A primer on rate-splitting multiple access: Tutorial, myths, and frequently asked questions. IEEE J. Sel. Areas Commun. 2023, 1265–1308. [Google Scholar] [CrossRef]
- Mao, Y.; Dizdar, O.; Clerckx, B.; Schober, R.; Popovski, P.; Poor, H.V. Rate-splitting multiple access: Fundamentals, survey, and future research trends. IEEE Commun. Surv. Tut. 2022, 24, 2073–2126. [Google Scholar] [CrossRef]
- Zhang, J.; Clerckx, B.; Ge, J.; Mao, Y. Cooperative Rate Splitting for MISO Broadcast Channel with User Relaying, and Performance Benefits Over Cooperative NOMA. IEEE Signal Process. Lett. 2019, 26, 1678–1682. [Google Scholar] [CrossRef]
- Mao, Y.; Clerckx, B.; Zhang, J.; Li, V.O.K.; Arafh, M.A. Max-Min Fairness of K-User Cooperative Rate-Splitting in MISO Broadcast Channel With User Relaying. IEEE Trans. Wirel. Commun. 2020, 19, 6362–6376. [Google Scholar] [CrossRef]
- Khisa, S.; Almekhlafi, M.; Elhattab, M.; Assi, C. Full duplex cooperative rate splitting multiple access for a MISO broadcast channel with two users. IEEE Commun. Lett. 2022, 26, 1913–1917. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Zhou, X.; Yuan, D. Full-duplex cooperative rate-splitting for multigroup multicast with SWIPT. IEEE Trans. Wirel. Commun. 2021, 21, 4379–4393. [Google Scholar] [CrossRef]
- Pan, Q.; Wu, J.; Zheng, X.; Yang, W.; Li, J. Differential privacy and IRS empowered intelligent energy harvesting for 6G Internet of Things. IEEE Internet Things J. 2021, 9, 22109–22122. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, W.; Li, B.; Wu, J.; You, C.; Meng, F. Reconfigurable Intelligent Surface Aided OTFS: Transmission Scheme and Channel Estimation. IEEE Internet Things J. 2023, 10, 19518–19532. [Google Scholar] [CrossRef]
- Liu, Y.; Mu, X.; Xu, J.; Schober, R.; Hao, Y.; Poor, H.V.; Hanzo, L. STAR: Simultaneous transmission and reflection for 360° coverage by intelligent surfaces. IEEE Wirel. Commun. 2021, 28, 102–109. [Google Scholar] [CrossRef]
- Zhang, H.; Di, B. Intelligent omni-surfaces: Simultaneous refraction and reflection for full-dimensional wireless communications. IEEE Commun. Surv. Tut. 2022, 24, 1997–2028. [Google Scholar] [CrossRef]
- Wu, C.; Liu, Y.; Mu, X.; Gu, X.; Dobre, O.A. Coverage characterization of STAR-RIS networks: NOMA and OMA. IEEE Commun. Lett. 2021, 25, 3036–3040. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, J.; Liu, Y.; Wu, Q.; He, B.; Yang, L. On the secrecy design of STAR-RIS assisted uplink NOMA networks. IEEE Trans. Wirel. Commun. 2022, 21, 11207–11221. [Google Scholar] [CrossRef]
- Zuo, J.; Liu, Y.; Ding, Z.; Song, L.; Poor, H.V. Joint design for simultaneously transmitting and reflecting (STAR) RIS assisted NOMA systems. IEEE Trans. Wirel. Commun. 2022, 22, 611–626. [Google Scholar] [CrossRef]
- Hashempour, H.R.; Bastami, H.; Moradikia, M.; Zekavat, S.A.; Behroozi, H.; Swindlehurst, A.L. Secure SWIPT in STAR-RIS Aided Downlink MISO Rate-Splitting Multiple Access Networks. arXiv 2022, arXiv:2211.09081. [Google Scholar]
- Katwe, M.; Singh, K.; Clerckx, B.; Li, C.P. Improved Spectral Efficiency in STAR-RIS Aided Uplink Communication using Rate Splitting Multiple Access. IEEE Trans. Wirel. Commun. 2023, 5365–5382. [Google Scholar] [CrossRef]
- Dhok, S.; Sharma, P.K. Rate-splitting multiple access with STAR RIS over spatially-correlated channels. IEEE Trans. Commun. 2022, 70, 6410–6424. [Google Scholar] [CrossRef]
- Clerckx, B.; Joudeh, H.; Hao, C.; Dai, M.; Rassouli, B. Rate splitting for MIMO wireless networks: A promising PHY-layer strategy for LTE evolution. IEEE Commun. Mag. 2016, 54, 98–105. [Google Scholar] [CrossRef]
- Riihonen, T.; Werner, S.; Wichman, R. Mitigation of Loopback Self-Interference in Full-Duplex MIMO Relays. IEEE Trans. Signal Process. 2011, 59, 5983–5993. [Google Scholar] [CrossRef]
- Sabharwal, A.; Schniter, P.; Guo, D.; Bliss, D.W.; Rangarajan, S.; Wichman, R. In-Band Full-Duplex Wireless: Challenges and Opportunities. IEEE J. Sel. Areas Commun. 2014, 32, 1637–1652. [Google Scholar] [CrossRef]
- Zhong, C.; Suraweera, H.A.; Zheng, G.; Krikidis, I.; Zhang, Z. Wireless Information and Power Transfer with Full Duplex Relaying. IEEE Trans. Commun. 2014, 62, 3447–3461. [Google Scholar] [CrossRef]
- Hu, J.; Beaulieu, N.C. Performance Analysis of Decode-and-Forward Relaying with Selection Combining. IEEE Commun. Lett. 2007, 11, 489–491. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, M.; Saad, W.; Xu, W.; Shikh-Bahaei, M.; Poor, H.V.; Cui, S. Energy-efficient wireless communications with distributed reconfigurable intelligent surfaces. IEEE Trans. Wirel. Commun. 2021, 21, 665–679. [Google Scholar] [CrossRef]
- Fang, T.; Mao, Y. A Low-Complexity Beamforming Design for Beyond-Diagonal RIS aided Multi-User Networks. IEEE Commun. Lett. 2024, 28, 203–207. [Google Scholar] [CrossRef]
- Oestges, C.; Clerckx, B. MIMO Wireless Communications: From Real-World Propagation to Space-Time Code Design; Academic Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Joudeh, H.; Clerckx, B. Sum-Rate Maximization for Linearly Precoded Downlink Multiuser MISO Systems with Partial CSIT: A Rate-Splitting Approach. IEEE Trans. Commun. 2016, 64, 4847–4861. [Google Scholar] [CrossRef]
- Kim, D.; Choi, J.; Park, J.; Kim, D.K. Max–Min fairness beamforming with rate-splitting multiple access: Optimization without a toolbox. IEEE Wirel. Commun. Lett. 2022, 12, 232–236. [Google Scholar] [CrossRef]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Schober, R. Simultaneously transmitting and reflecting (STAR) RIS aided wireless communications. IEEE Trans. Wirel. Commun. 2021, 21, 3083–3098. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Mao, Y.; Shi, Y. Simultaneously Transmitting and Reflecting Reconfigurable Intelligent Surfaces Empowered Cooperative Rate Splitting with User Relaying. Entropy 2024, 26, 1019. https://doi.org/10.3390/e26121019
Zhao K, Mao Y, Shi Y. Simultaneously Transmitting and Reflecting Reconfigurable Intelligent Surfaces Empowered Cooperative Rate Splitting with User Relaying. Entropy. 2024; 26(12):1019. https://doi.org/10.3390/e26121019
Chicago/Turabian StyleZhao, Kangchun, Yijie Mao, and Yuanming Shi. 2024. "Simultaneously Transmitting and Reflecting Reconfigurable Intelligent Surfaces Empowered Cooperative Rate Splitting with User Relaying" Entropy 26, no. 12: 1019. https://doi.org/10.3390/e26121019
APA StyleZhao, K., Mao, Y., & Shi, Y. (2024). Simultaneously Transmitting and Reflecting Reconfigurable Intelligent Surfaces Empowered Cooperative Rate Splitting with User Relaying. Entropy, 26(12), 1019. https://doi.org/10.3390/e26121019