
Design and Analysis of Asynchronous Sampling Duty Cycle Corrector




Abstract
:1. Introduction
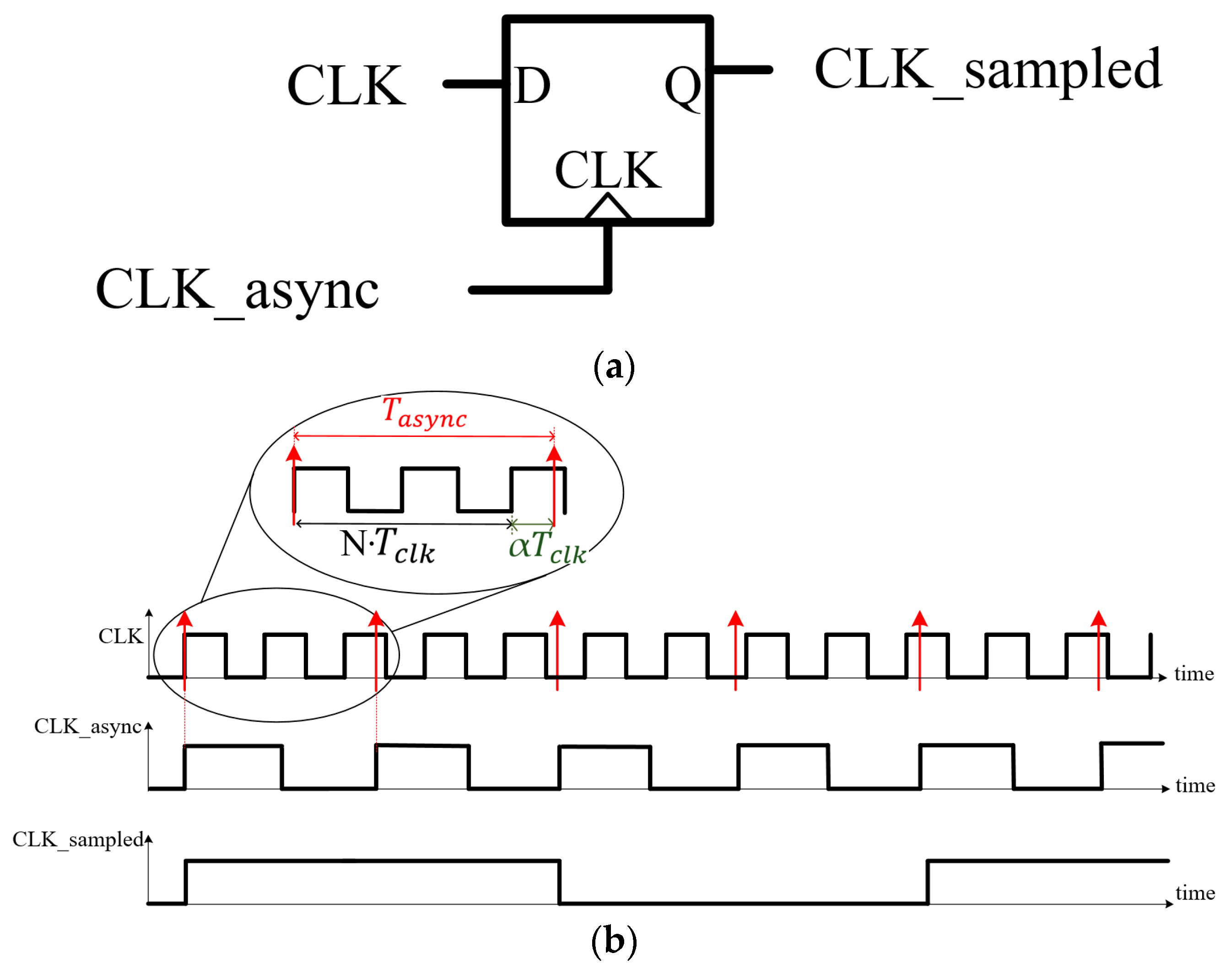
2. Asynchronous Sampling
3. Analysis on Asynchronous Sampling
3.1. Settling Requirements
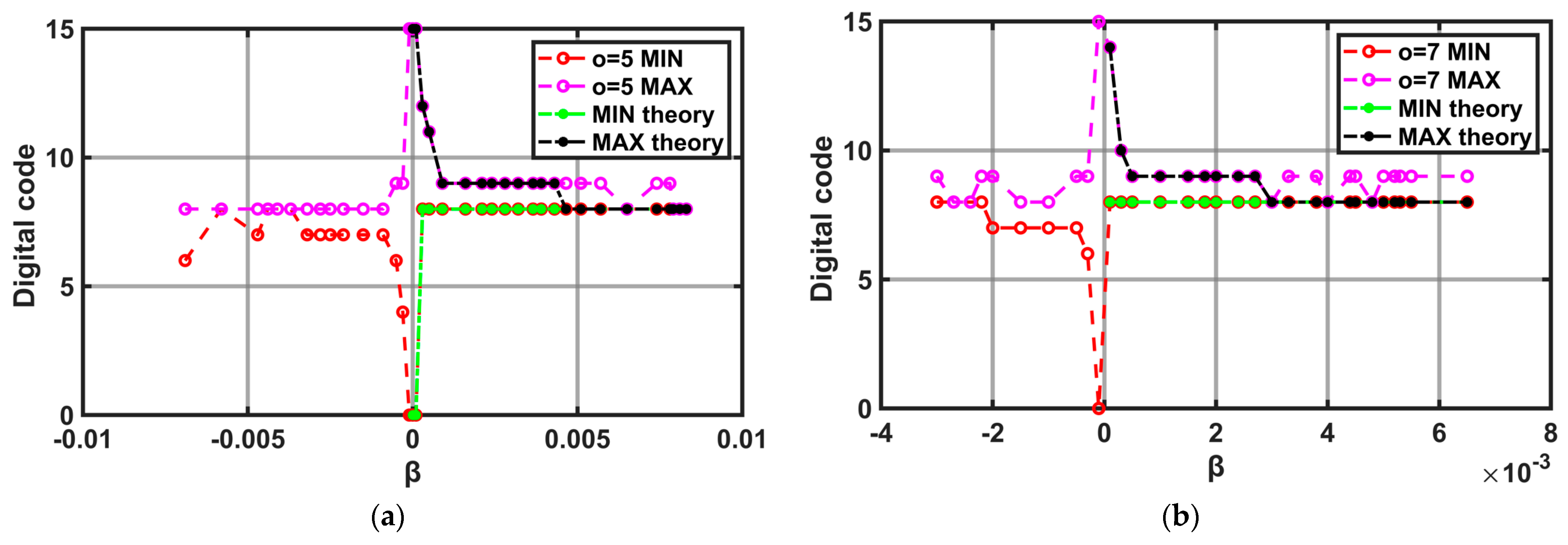
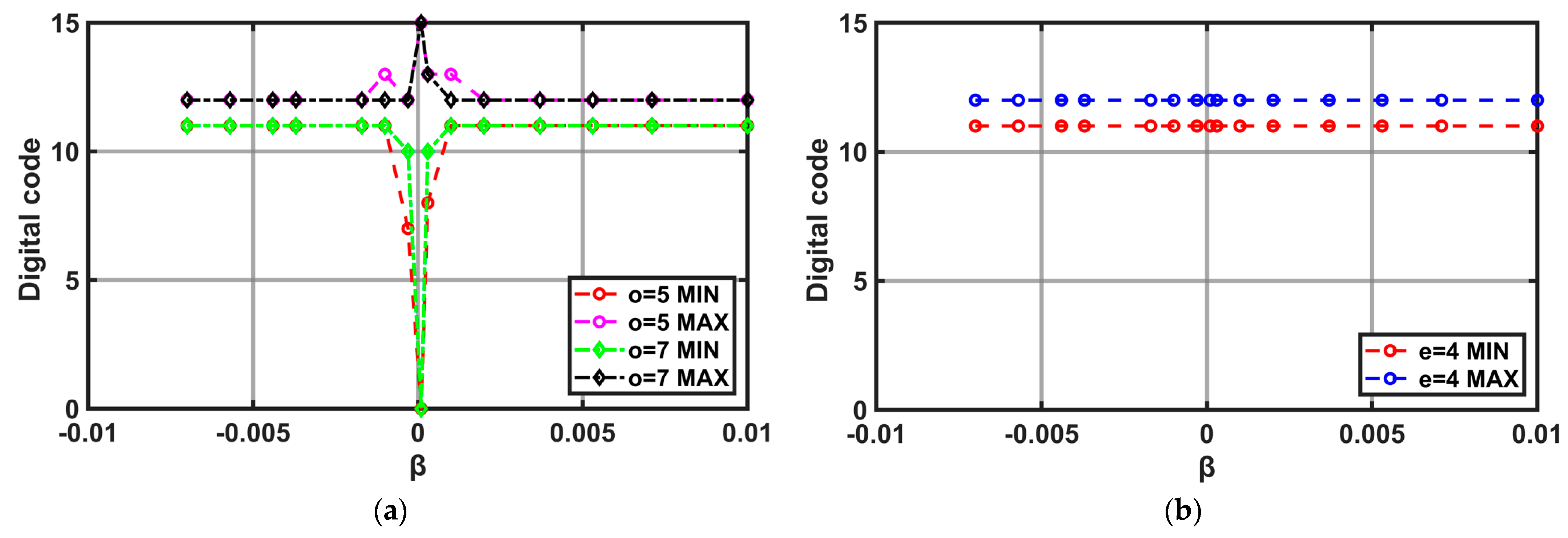
3.2. Verification with Behaviroal Simulations
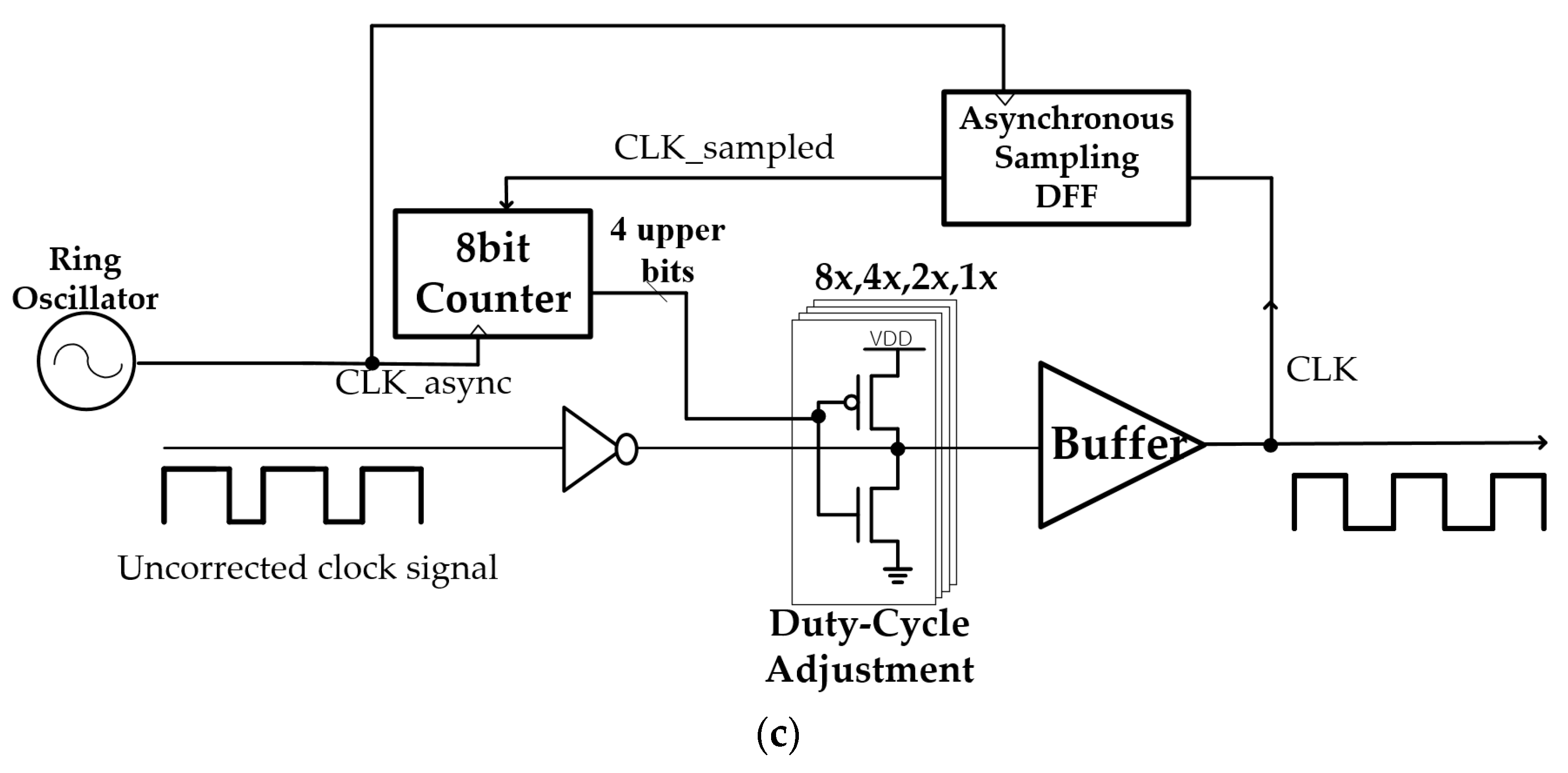
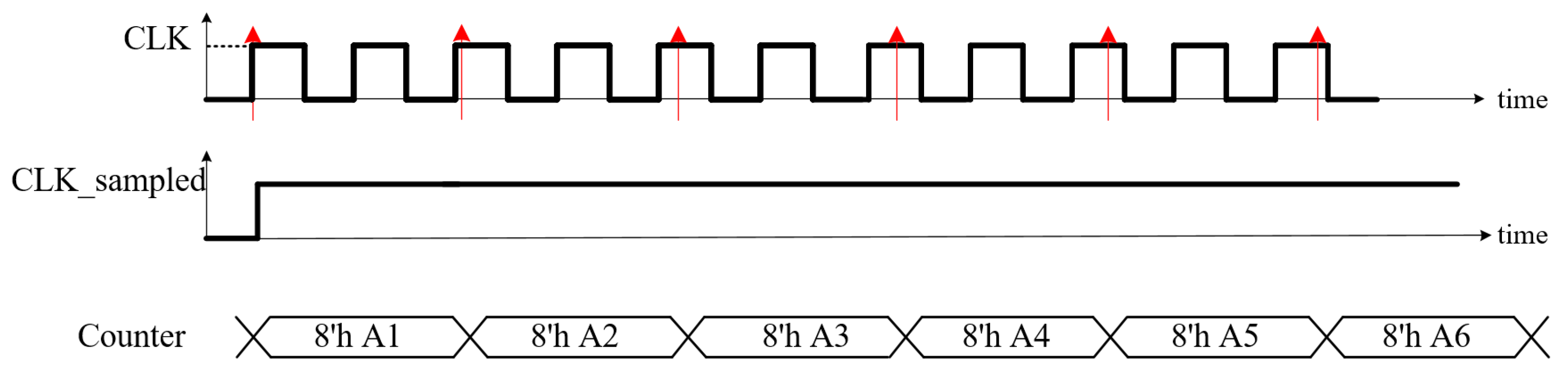
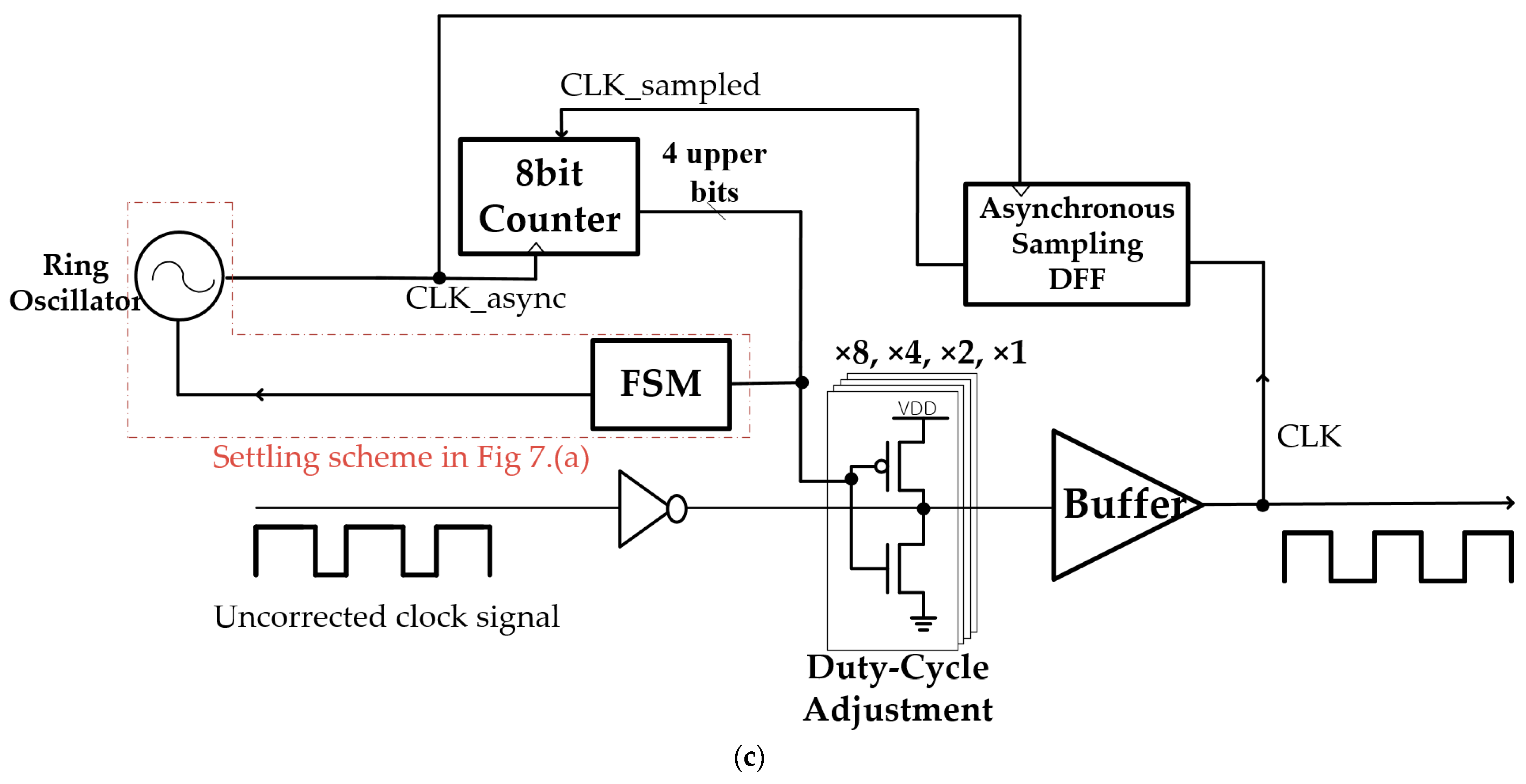
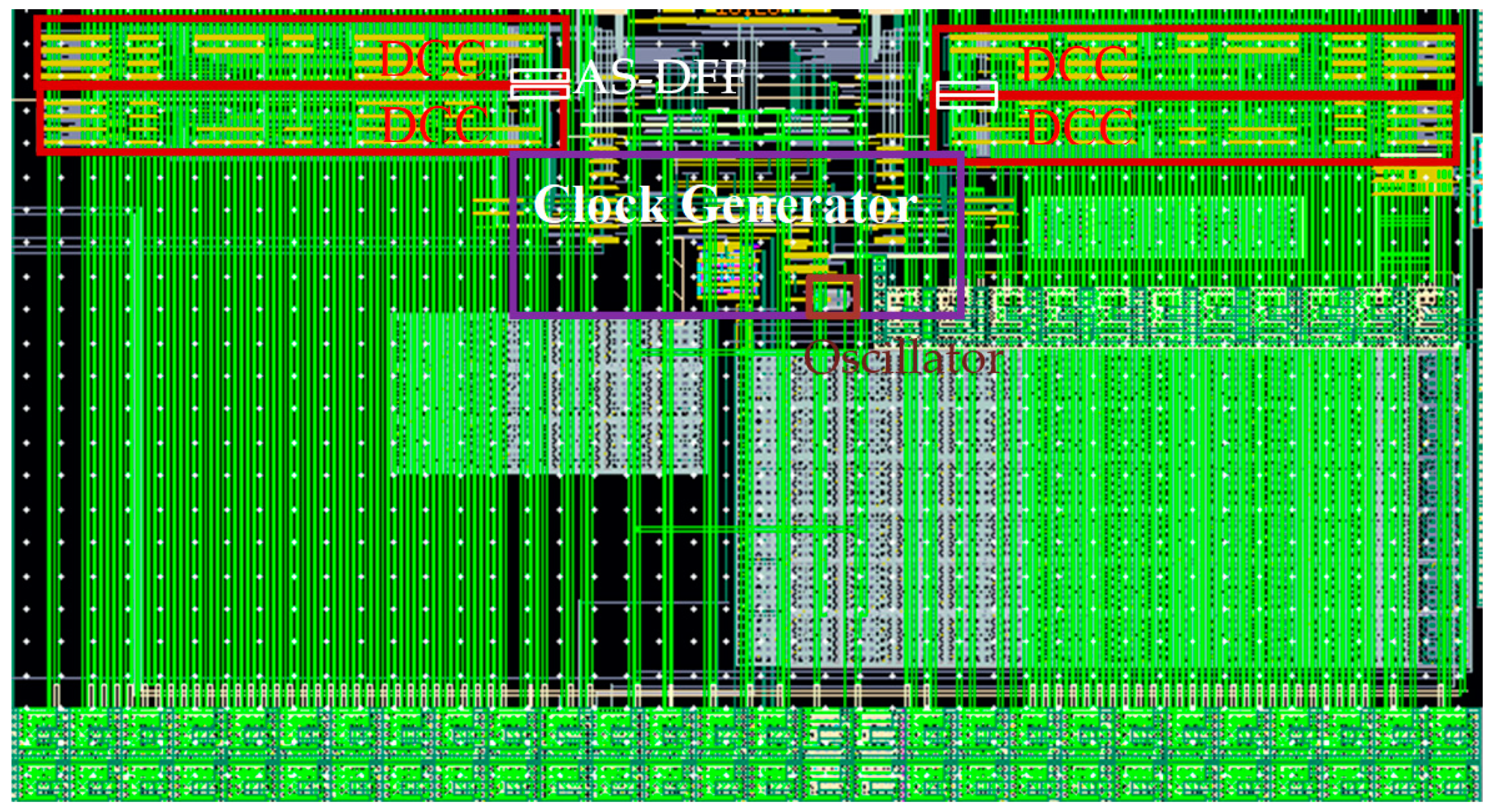
4. Design Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, Y.-T.; Chen, W.-Z. A 50 Gb/s PAM-4 Transmitter with feedforward equalizer and background phase error calibration. In Proceedings of the 2020 IEEE Asian Solid-State Circuits Conference (A-SSCC), Virtual, 9–10 November 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Vazgen, M.-S.; Arman, A.-A.; Manvel, G.-T.; Hakob, K.-T.; Karo, S.-H.; Ruben, M.-H. Duty-cycle correction circuit for high speed interfaces. In Proceedings of the 2019 IEEE 39th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 16–18 April 2019; pp. 42–45. [Google Scholar]
- SR, J.P.; Hiremath, S.S. Dual loop clock duty cycle corrector for high speed serial interface. In Proceedings of the 2017 International Conference on Smart Technologies for Smart Nation (SmartTechCon), Bengaluru, India, 17–19 August 2017; pp. 935–939. [Google Scholar] [CrossRef]
- Jeong, C.-H.; Abdullah, A.; Min, Y.-J.; Hwang, I.-C.; Kim, S.-W. All-digital duty-cycle corrector with a wide duty correction range for DRAM applications. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2016, 24, 363–367. [Google Scholar] [CrossRef]
- Chen, P.; Chen, S.-W.; Lai, J.-S. A low power wide tange duty cycle corrector based on pulse shrinking/stretching mechanism. In Proceedings of the 2007 IEEE Asian Solid-State Circuits Conference, Jeju, Korea, 12–14 November 2007; pp. 460–463. [Google Scholar] [CrossRef]
- Chung, C.-C.; Sheng, D.; Li, C.-J. A Wide-range low-cost all-digital duty-cycle corrector. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2014, 23, 2487–2496. [Google Scholar] [CrossRef]
- Wei, S.-N.; Wang, Y.-M.; Peng, J.-H.; Surya, Y. A range extending delay-recycled clock skew-compensation and/or duty-cycle-correction circuit. In Proceedings of the Technical Program of 2012 VLSI Design, Automation and Test, Hsinchu, Taiwan, 23–25 April 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Han, S.-R.; Liu, S.-I. A 500-MHz–1.25-GHz Fast-Locking Pulsewidth Control Loop with Presettable Duty Cycle. IEEE J. Solid-State Circuits 2004, 39, 463–468. [Google Scholar] [CrossRef]
- Shin, N.; Song, J.; Chae, H.; Kim, C. A 7 ps Jitter 0.053 mm2 Fast Lock All-Digital DLL With a Wide Range and High Resolution DCC. IEEE J. Solid-State Circuits 2009, 44, 2437–2451. [Google Scholar] [CrossRef]
- Kang, K.-T.; Kim, S.-Y.; Kim, S.J.; Lee, D.; Yoo, S.-S.; Lee, K.-Y. A 0.33–1 GHz Open-Loop Duty Cycle Corrector with Digital Falling Edge Modulator. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1949–1953. [Google Scholar] [CrossRef]
- Min, Y.-J.; Jeong, C.-H.; Kim, K.-Y.; Choi, W.H.; Son, J.-P.; Kim, C.; Kim, S.-W. A 0.31–1 GHz Fast-Corrected Duty-Cycle Corrector with Successive Approximation Register for DDR DRAM Applications. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2012, 20, 1524–1528. [Google Scholar] [CrossRef]
- Agarwal, K.B.; Montoye, R.K. A Duty-cycle correction circuit for high-frequency clocks. In Proceedings of the 2006 Symposium on VLSI Circuits, 2006. Digest of Technical Papers, Honolulu, HI, USA, 15–17 June 2006. [Google Scholar] [CrossRef]
- Cheng, K.-H.; Su, C.-W.; Chang, K.-F. A High Linearity, Fast-Locking Pulsewidth Control Loop with Digitally Programmable Duty Cycle Correction for Wide Range Operation. IEEE J. Solid-State Circuits 2008, 43, 399–413. [Google Scholar] [CrossRef]
- Zuo, S.; Zhao, J.; Zhou, Y. A 2.1 GHz, 210 μW, —189 dBc/Hz DCO with Ultra Low Power DCC Scheme. Electronics 2021, 10, 805. [Google Scholar] [CrossRef]
- Su, J.-R.; Liao, T.-W.; Hung, C.-C. Delay-line based fast-locking all-digital pulsewidth-control circuit with programmable duty cycle. In Proceedings of the IEEE Asian Solid State Circuits Conference (A-SSCC), Kobe, Japan, 12–14 November 2012; pp. 305–308. [Google Scholar] [CrossRef]
- Kao, S.-K. A 6-Locking Cycles All-Digital Duty Cycle Corrector with Synchronous Input Clock. Electronics 2021, 10, 860. [Google Scholar] [CrossRef]
- Kao, S.-K. Design and Implementation of Fast Locking All-Digital Duty Cycle Corrector Circuit with Wide Range Input Frequency. Electronics 2021, 10, 71. [Google Scholar] [CrossRef]
- Mansuri, M.; Jaussi, J.E.; Kennedy, J.T.; Hsueh, T.-C.; Shekhar, S.; Balamurugan, G.; O’Mahony, F.; Roberts, C.; Mooney, R.; Casper, B. A Scalable 0.128–1 Tb/s, 0.8–2.6 pJ/bit, 64-Lane Parallel I/O in 32-nm CMOS. IEEE J. Solid-State Circuits 2013, 48, 3229–3242. [Google Scholar] [CrossRef]
- Bae, W. Frequency acquisition technique for injection-locked clock generator using asynchronous-sampling frequency detection. Electron. Lett. 2017, 53, 1240–1242. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, G.; Han, J.; Bae, W. Design and Analysis of Asynchronous Sampling Duty Cycle Corrector. Electronics 2021, 10, 2594. https://doi.org/10.3390/electronics10212594
Park G, Han J, Bae W. Design and Analysis of Asynchronous Sampling Duty Cycle Corrector. Electronics. 2021; 10(21):2594. https://doi.org/10.3390/electronics10212594
Chicago/Turabian StylePark, Gijin, Jaeduk Han, and Woorham Bae. 2021. "Design and Analysis of Asynchronous Sampling Duty Cycle Corrector" Electronics 10, no. 21: 2594. https://doi.org/10.3390/electronics10212594
APA StylePark, G., Han, J., & Bae, W. (2021). Design and Analysis of Asynchronous Sampling Duty Cycle Corrector. Electronics, 10(21), 2594. https://doi.org/10.3390/electronics10212594