A Cooperative Machine Learning Approach for Pedestrian Navigation in Indoor IoT

 , , and
, , and
Abstract
1. Introduction
1.1. Related Works
1.2. Original Contributions
- We propose a machine learning algorithm to detect whether magnetometer measurements collected by the device-embedded sensors are severely perturbed. The algorithm is completely self-sufficient, i.e., it detects perturbed measurements using only features extracted from magnetic readings. We show that this algorithm can detect perturbation with an accuracy of 95%.
- We design an algorithm to detect pedestrians walking in the same direction, using a machine learning approach. The algorithm exploits RSS data extracted from WiFi beacons exchanged by pedestrians’ mobile devices. Our experiments indicate that the proposed algorithm can detect pedestrians walking in the same direction with an accuracy of 90%.
- We prove that fusion of heading data can be carried out in a fully distributed way, with negligible performance loss compared to the centralized fusion. Different consensus approaches are considered for data fusion. The performances of the algorithms are analyzed in terms of localization accuracy and convergence rate, for varying number of users and connectivity graphs.
- We evaluate the performance of the proposed architecture utilizing experimental data. We find that the proposed architecture achieves an error reduction of 86% in the heading estimation and 79% in user localization compared to PDR legacy architecture. In order to show the reliability of the proposed approach, we evaluated the performance for different experiments at different locations. Our result indicates that the error reduction is consistent for different settings and independent of the location and time of the experiments.
2. Cooperative Machine Learning PDR
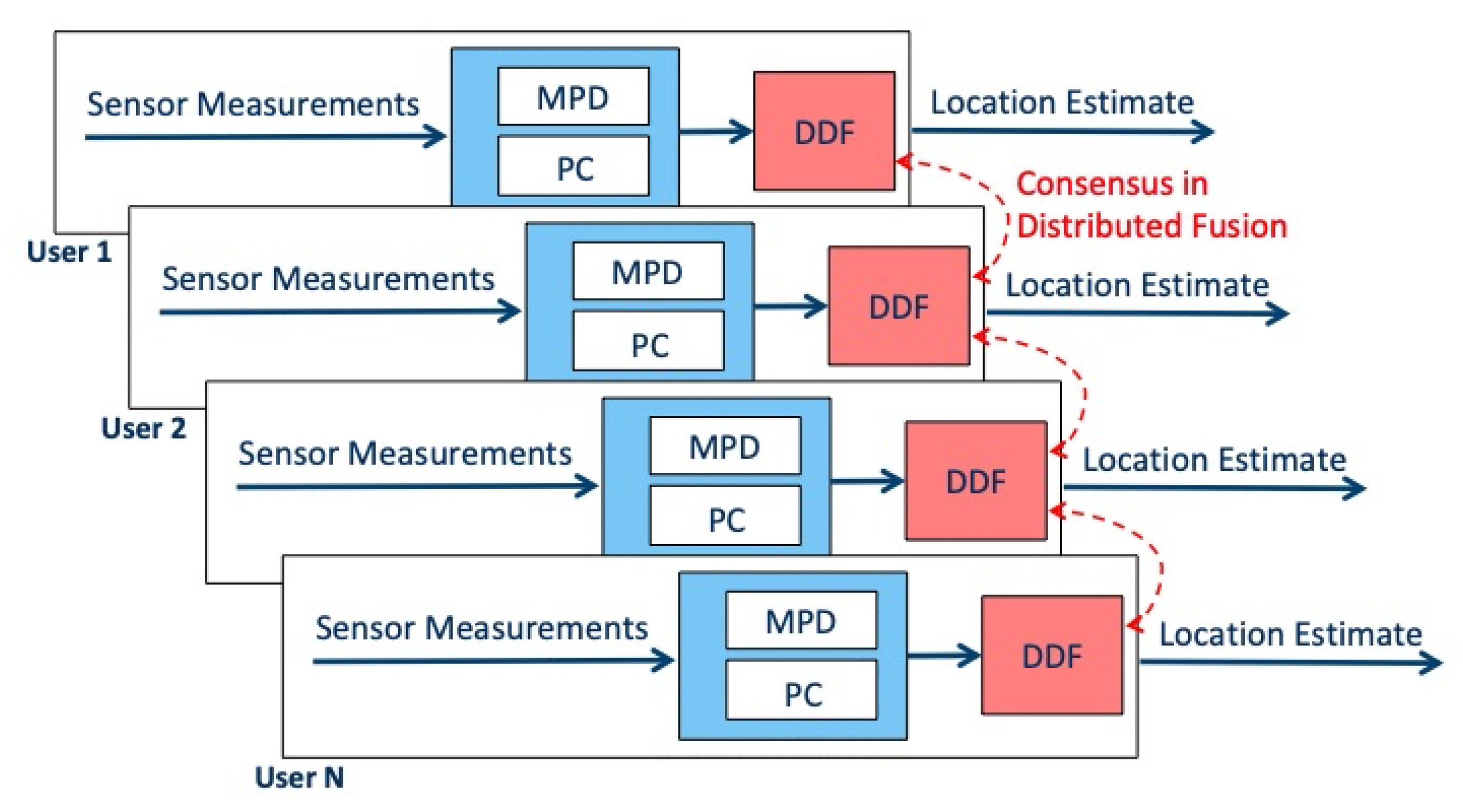
- The MPD component detects highly corrupted magnetometer readings based on a ML approach. Perturbed measurements have to be excluded from data fusion to avoid large positioning errors. For this reason, only heading readings that are believed to fall within a selected error margin are retained and passed to the subsequent processing steps.
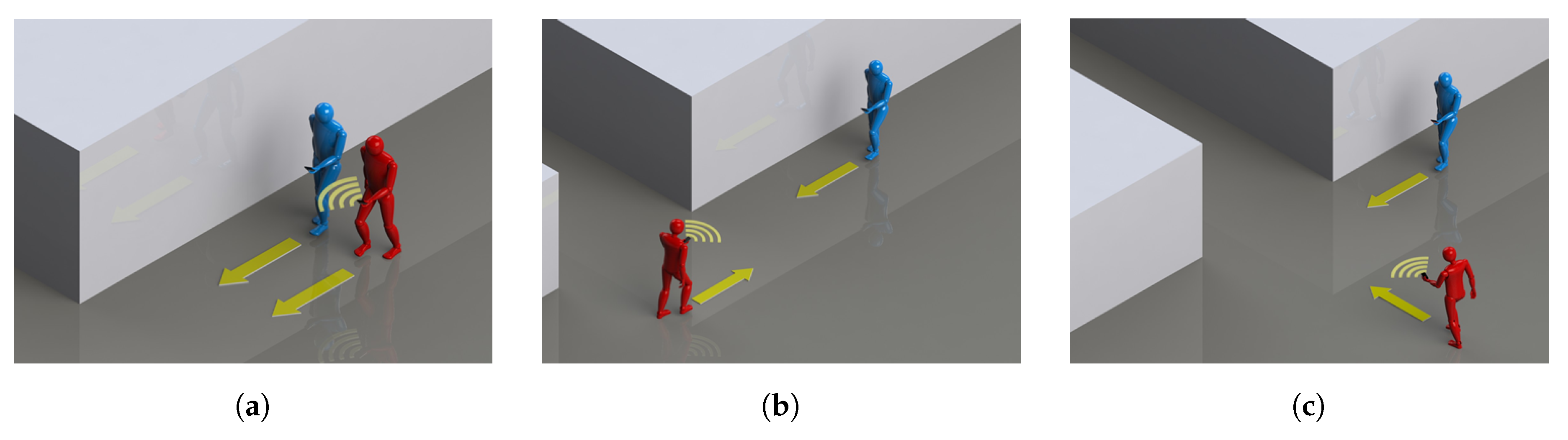
- The PC component identifies groups of pedestrians walking in the same direction. This detection has a key role as it aggregates users that can benefit from measurements fusion. ML approach is used to perform this clustering, based on RSS measurements exchanged among users.
- The DDF component aggregates the heading measurements that have been filtered by MPD and PC in a fully distributed way. The outcome is shared with all the users belonging to the same group, including those that were excluded from data fusion.
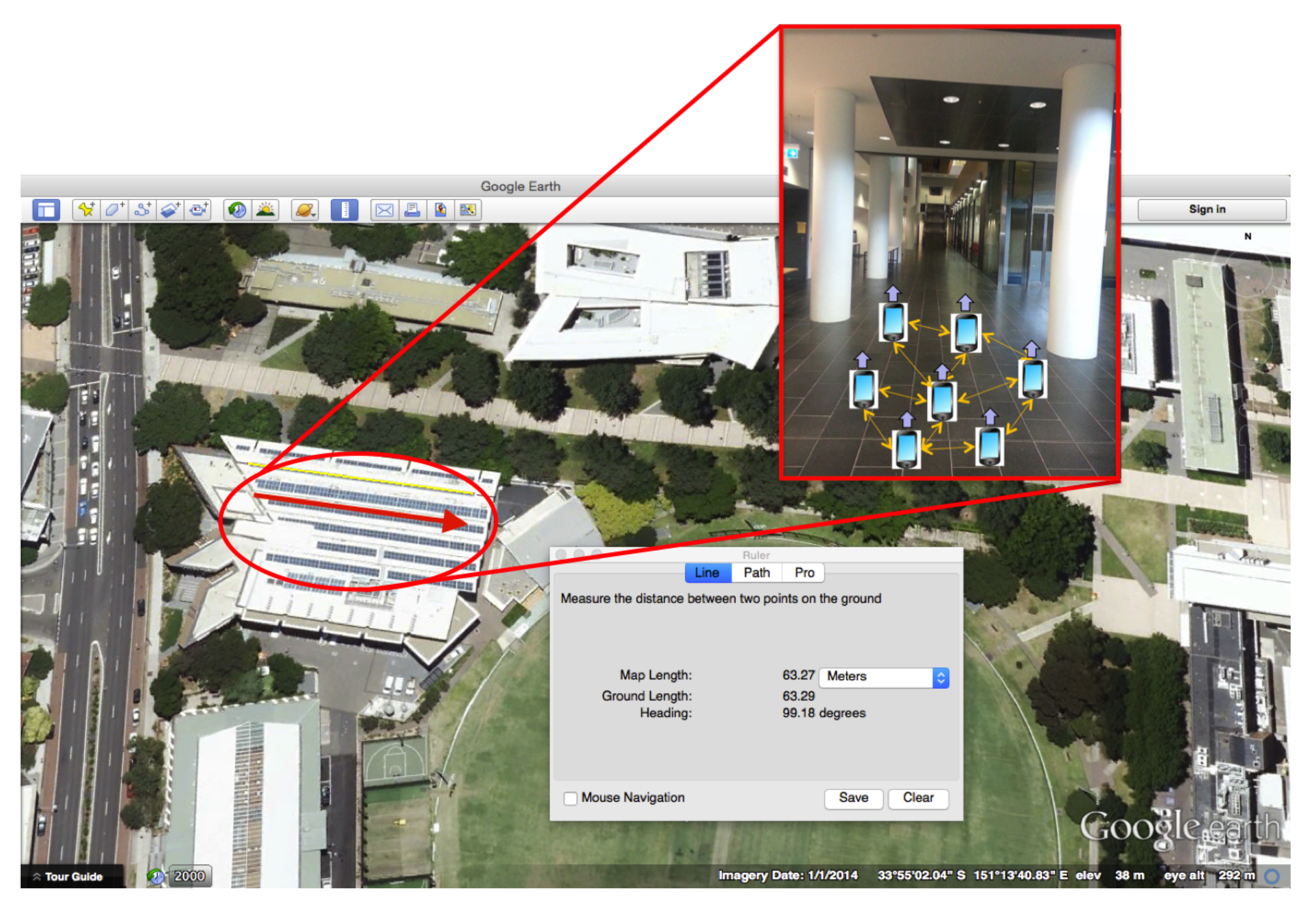
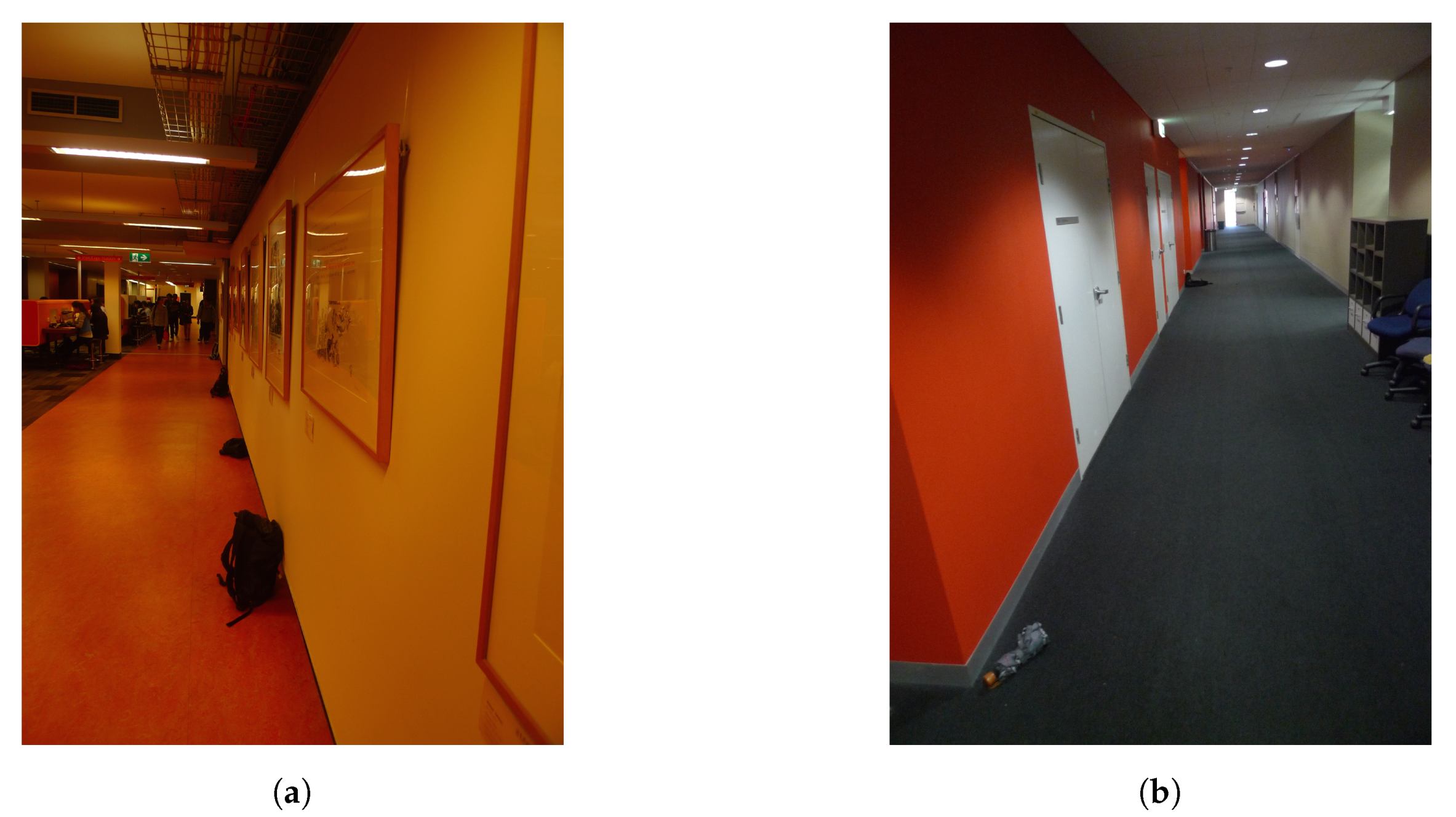
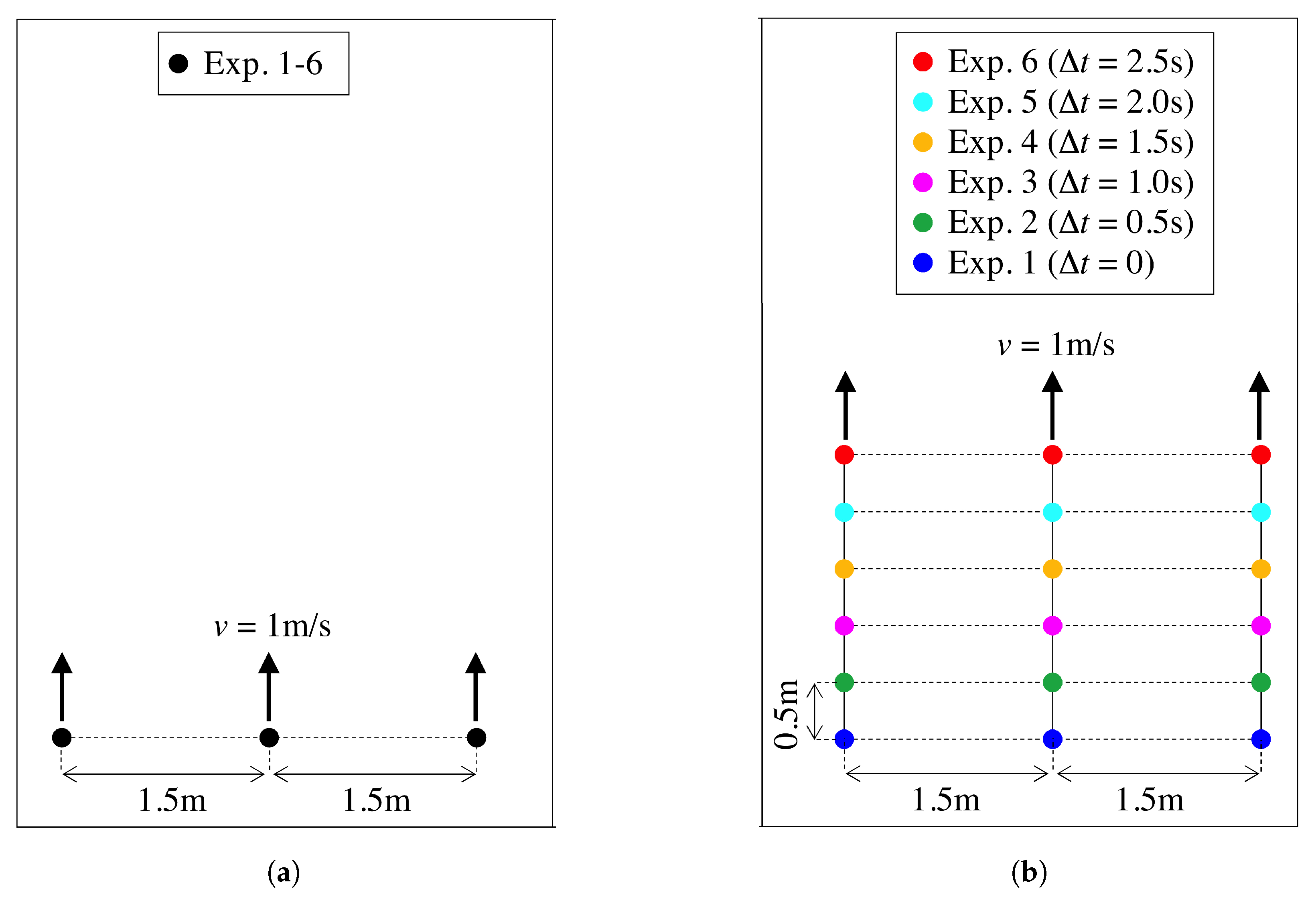
3. Experiments
3.1. Small-Scale Scenario
3.2. Large-Scale Scenario
4. Magnetic Perturbation Detection (MPD)
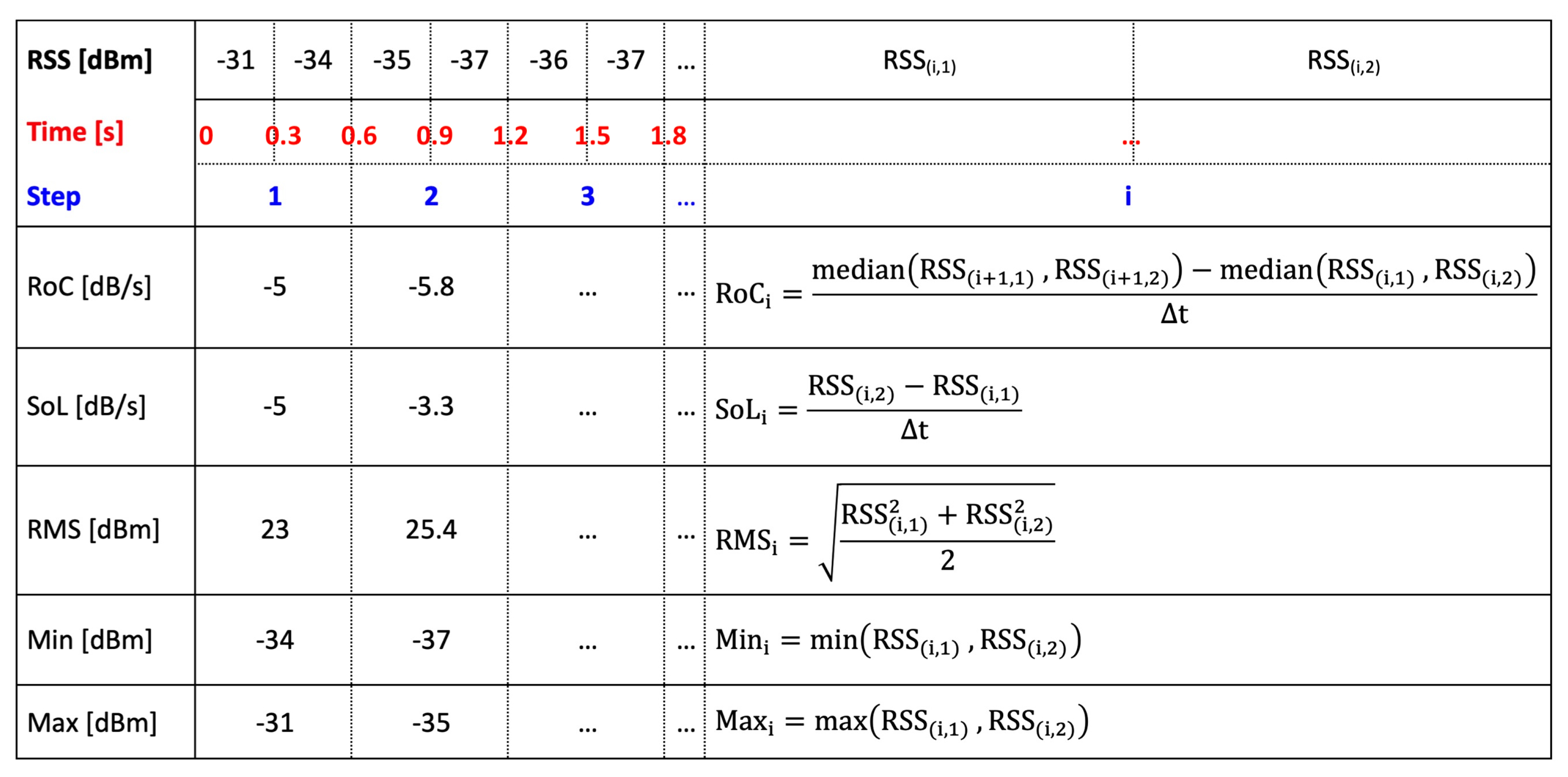
5. Pedestrian Clustering (PC)
- Rate of change (RoC) of RSS values over two consequent time windows.
- Slope of the line of best fit (SoP) of RSS values in a given time window.
- Root mean square (RMS) of the RSS values in a given time window.
- Minimum (Min) RSS value recorded in a given time window.
- Maximum (Max) RSS value recorded in a given time window.
6. Distributed Data Fusion (DDF)
7. System Evaluation
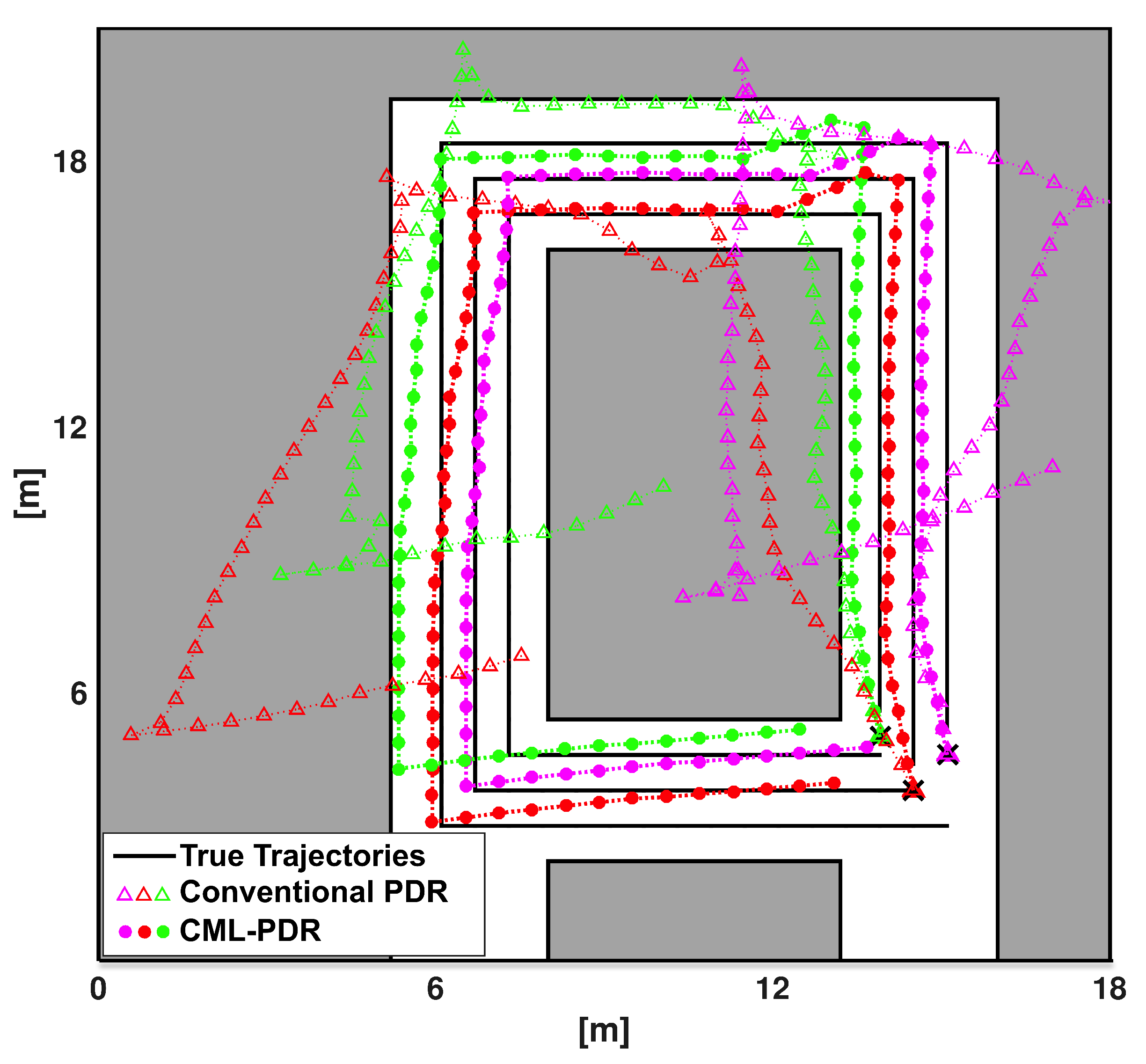
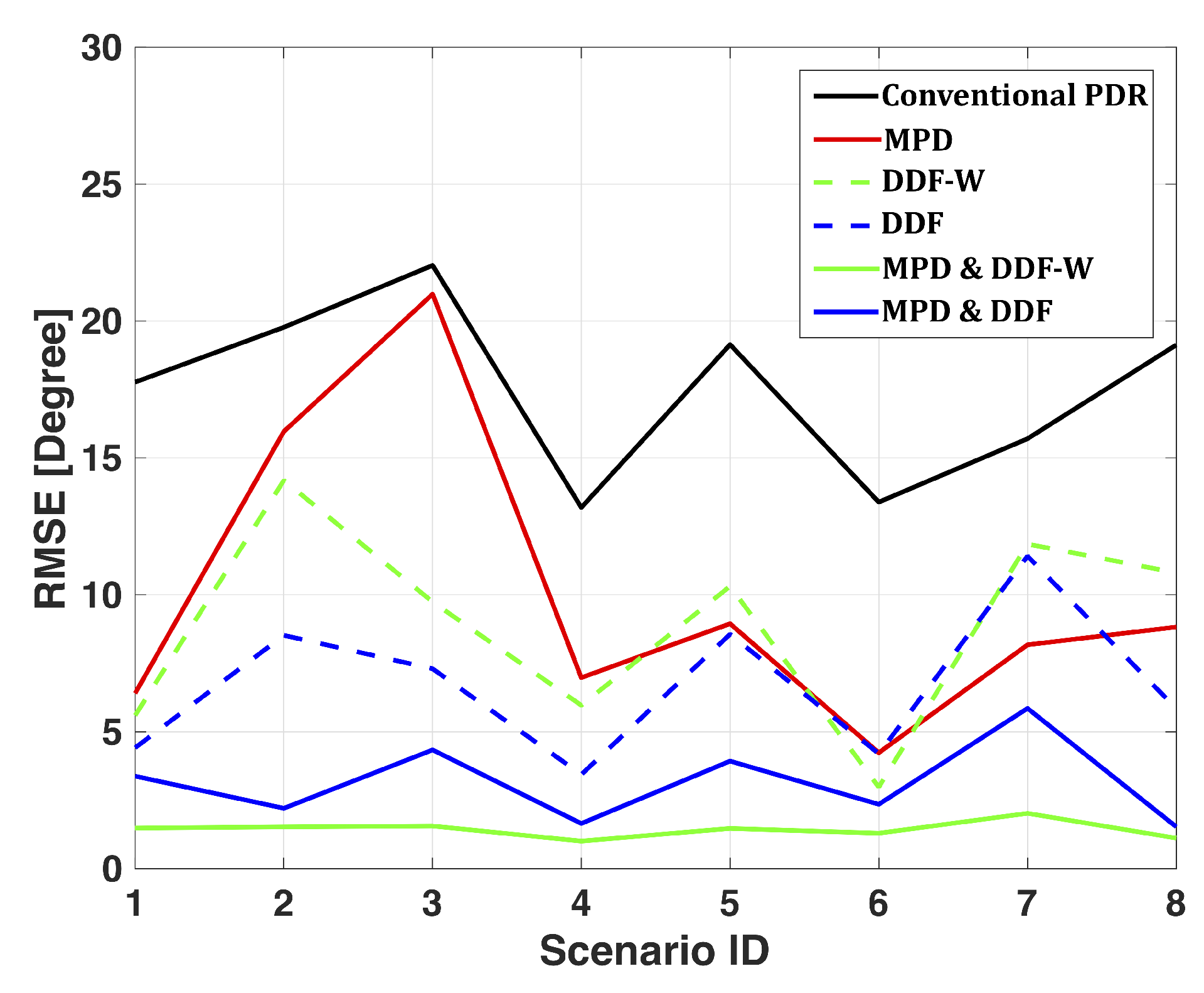
- Conventional PDR: only magnetometer readings are used to compute the heading without any further processing.
- MPD: only perturbation filtering is used and the simple average is carried out on the filtered heading.
- DDF: only distributed fusion is performed using the AC algorithm.
- DDF-W: only distributed fusion is applied using WAC.
- MPD & DDF: cascade of MPD and DDF.
- MPD & DDF-W: cascade of MPD and DDF-W.
- MPD & CDF: the centralized unweighted computation of (5) is employed after the MPD.
- MPD & CDF-W: the centralized weighted computation of (5) is employed after the MPD.
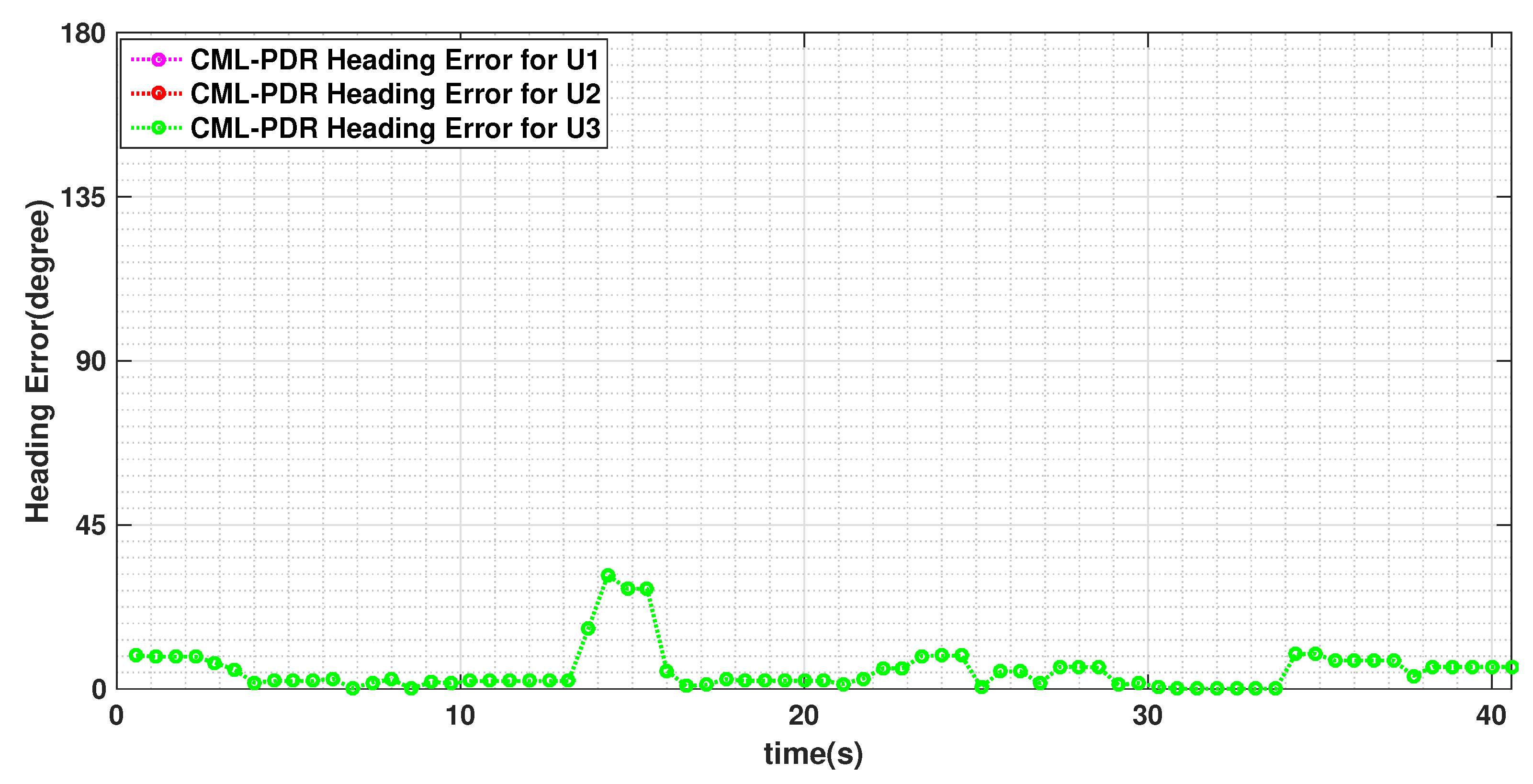
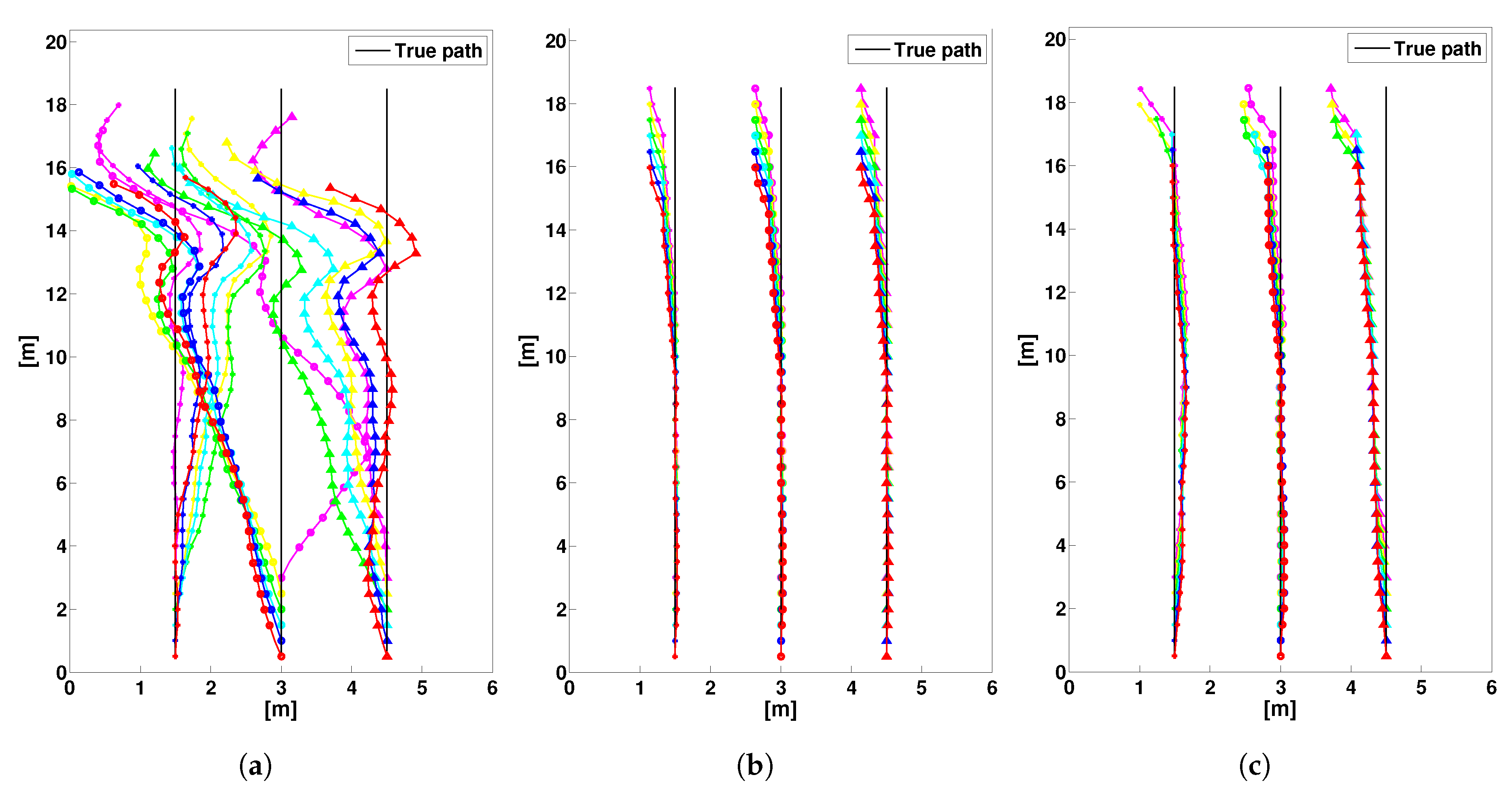
7.1. Localization Performance Analysis
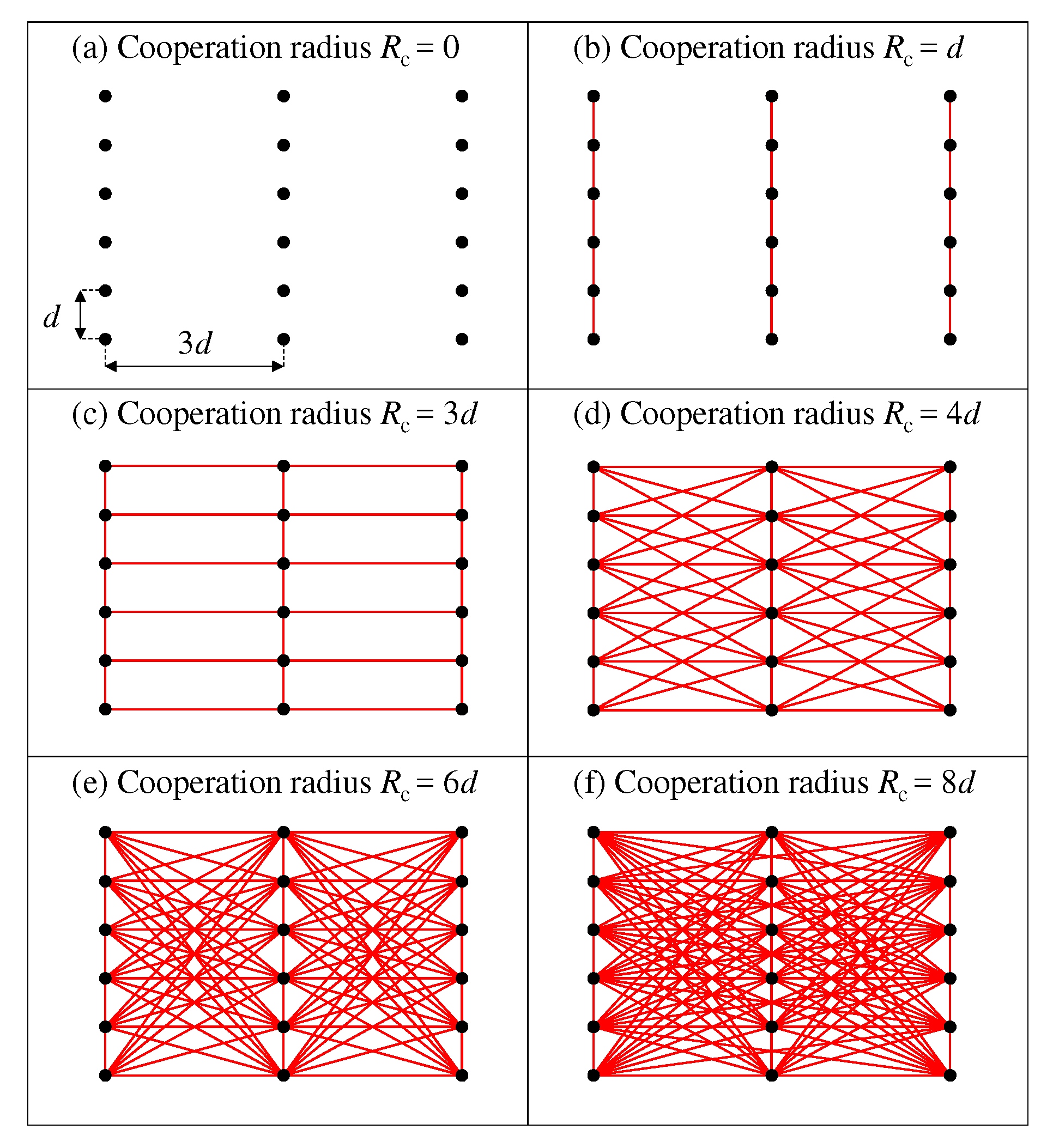
7.2. Localization Performance vs. Degree of Cooperation
8. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Poslad, S. Ubiquitous Computing: Smart Devices, Environments and Interactions, 1st ed.; Wiley Publishing: Haboken, NJ, USA, 2009. [Google Scholar]
- Sagl, G.; Resch, B.; Blaschke, T. Contextual Sensing: Integrating Contextual Information with Human and Technical Geo-Sensor Information for Smart Cities. Sensors 2015, 15, 17013–17035. [Google Scholar] [CrossRef]
- Thurm, S.; Kane, Y.I. Your Apps Are Watching You. Wall Str. J. 2010, 17, 1. [Google Scholar]
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Dhar, S.; Varshney, U. Challenges and Business Models for Mobile Location-based Services and Advertising. Commun. ACM 2011, 54, 121–128. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Kim, S.C.; Lee, J.K. Wireless Localization Method based on an Efficient Multilateration Algorithm over a Wireless Sensor Network and a Recording Medium in Which a Program for the Method is Recorded. U.S. Patent 8478292, 2 July 2013. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Li, Y.; El-Sheimy, N. Evaluation of Two WiFi Positioning Systems Based on Autonomous Crowdsourcing of Handheld Devices for Indoor Navigation. IEEE Trans. Mob. Comput. 2016, 15, 1982–1995. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A Review and Taxonomy of Sensors Localization in IoT Infrastructure. IEEE Commun. Surv. Tutor. 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Kwak, M.; Park, Y.; Kim, J.; Han, J.; Kwon, T. An Energy-Efficient and Lightweight Indoor Localization System for Internet-of-Things (IoT) Environments. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 17:1–17:28. [Google Scholar] [CrossRef]
- Cho, S.B. Exploiting Machine Learning Techniques for Location Recognition and Prediction with Smartphone Logs. Neurocomputing 2016, 176, 98–106. [Google Scholar] [CrossRef]
- Luceri, L.; Cardoso, F.; Papandrea, M.; Giordano, S.; Buwaya, J.; Kundig, S.; Angelopoulos, C.M.; Rolim, J.; Zhao, Z.; Carrera, J.L.; et al. VIVO: A Secure, Privacy-Preserving, and Real-time Crowd-Sensing Framework for the Internet of Things. Pervasive Mob. Comput. 2018, 49, 126–138. [Google Scholar] [CrossRef]
- Steinhoff, U.; Schiele, B. Dead Reckoning from the Pocket - An Experimental Study. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 20 May 2010; pp. 162–170. [Google Scholar] [CrossRef]
- Woodman, O.; Harle, R. Pedestrian Localisation for Indoor Environments. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; ACM: New York, NY, USA, 2008; pp. 114–123. [Google Scholar] [CrossRef]
- Beauregard, S.; Haas, H. Pedestrian Dead Reckoning: A Basis for Personal Positioning. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication (WPNC’06), Hannover, Germany, 16–19 March 2006; pp. 27–35. [Google Scholar]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A Reliable and Accurate Indoor Localization Method using Phone Inertial Sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; ACM: New York, NY, USA, 2012; pp. 421–430. [Google Scholar] [CrossRef]
- Borenstein, J.; Ojeda, L. Heuristic Drift Elimination for Personnel Tracking Systems. J. Navig. 2010, 63, 591–606. [Google Scholar] [CrossRef]
- Bachmann, E.; Yun, X.; Brumfield, A. Limitations of Attitude Estimation Algorithms for Inertial/Magnetic Sensor Modules. IEEE Robot. Autom. Mag. 2007, 14, 76–87. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C. Magnetic, Acceleration Fields and Gyroscope Quaternion (MAGYQ)-Based Attitude Estimation with Smartphone Sensors for Indoor Pedestrian Navigation. Sensors 2014, 14, 22864. [Google Scholar] [CrossRef]
- Yadav, N.; Bleakley, C. Accurate Orientation Estimation Using AHRS under Conditions of Magnetic Distortion. Sensors 2014, 14, 20008–20024. [Google Scholar] [CrossRef] [PubMed]
- Wi-Fi Alliance, P2P Technical Group. Wi-Fi Peer-to-Peer (P2P) Technical Specification v1.7; P2P Technical Group: Kitchener, ON, Canada, 2009. [Google Scholar]
- Jung, S.; Hann, S.; Park, C. TDOA-based Optical Wireless Indoor Localization using LED Ceiling Lamps. IEEE Trans. Consum. Electron. 2011, 57, 1592–1597. [Google Scholar] [CrossRef]
- Nicoli, M.; Morelli, C.; Rampa, V. A Jump Markov Particle Filter for Localization of Moving Terminals in Multipath Indoor Scenarios. IEEE Trans. Signal Process. 2008, 56, 3801–3809. [Google Scholar] [CrossRef]
- Hazas, M.; Hopper, A. Broadband Ultrasonic Location Systems for Improved Indoor Positioning. IEEE Trans. Mob. Comput. 2006, 5, 536–547. [Google Scholar] [CrossRef]
- Altini, M.; Brunelli, D.; Farella, E.; Benini, L. Bluetooth Indoor Localization with Multiple Neural Networks. In Proceedings of the IEEE 5th International Symposium on Wireless Pervasive Computing, Modena, Italy, 14 June 2010; pp. 295–300. [Google Scholar] [CrossRef]
- Ni, L.; Liu, Y.; Lau, Y.C.; Patil, A. LANDMARC: Indoor Location Sensing using Active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications (PerCom), Fort Worth, TX, USA, 26 March 2003; pp. 407–415. [Google Scholar] [CrossRef]
- Almaaitah, A.; Ali, K.; Hassanein, H.S.; Ibnkahla, M. 3D Passive Tag Localization Schemes for Indoor RFID Applications. In Proceedings of the IEEE International Conference on Communications, Cape Town, South Africa, 23–27 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN Location Determination System. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Washington, DC, USA, 6–8 June 2005; ACM: New York, NY, USA, 2005; pp. 205–218. [Google Scholar] [CrossRef]
- Otsason, V.; Varshavsky, A.; LaMarca, A.; de Lara, E. Accurate GSM Indoor Localization. In UbiComp 2005: Ubiquitous Computing; Lecture Notes in Computer Science; Beigl, M., Intille, S., Rekimoto, J., Tokuda, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3660, pp. 141–158. [Google Scholar] [CrossRef]
- Chung, J.; Donahoe, M.; Schmandt, C.; Kim, I.J.; Razavai, P.; Wiseman, M. Indoor Location Sensing using GEO-Magnetism. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services, Bethesda, MD, USA, 28 June–1 July 2011; ACM: New York, NY, USA, 2011; pp. 141–154. [Google Scholar] [CrossRef]
- Tarzia, S.P.; Dinda, P.A.; Dick, R.P.; Memik, G. Indoor Localization Without Infrastructure Using the Acoustic Background Spectrum. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services, Bethesda, MD, USA, 28 June–1 July 2011; ACM: New York, NY, USA, 2011; pp. 155–168. [Google Scholar] [CrossRef]
- Zou, H.; Xie, L.; Jia, Q.S.; Wang, H. Platform and Algorithm Development for a RFID-based Indoor Positioning System. Unmanned Syst. 2014, 2, 279–291. [Google Scholar] [CrossRef]
- Moghtadaiee, V.; Dempster, A.G. Design Protocol and Performance Analysis of Indoor Fingerprinting Positioning Systems. Phys. Commun. 2014, 13, 17–30. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. mPILOT-Magnetic Field Strength Based Pedestrian Indoor Localization. Sensors 2018, 18, 2283. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Lu, X.; Markham, A.; Trigoni, N. IONet: Learning to Cure the Curse of Drift in Inertial Odometry. In Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Jiménez, A.R.; Seco, F.; Zampella, F.; Prieto, J.C.; Guevara, J. Improved Heuristic Drift Elimination (iHDE) for pedestrian navigation in complex buildings. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Jimenez, A.R.; Seco, F.; Zampella, F.; Prieto, J.C.; Guevara, J. Improved Heuristic Drift Elimination with Magnetically-aided Dominant Directions MiHDE for Pedestrian Navigation in Complex Buildings. J. Locat. Based Serv. 2012, 6, 186–210. [Google Scholar] [CrossRef]
- Qiu, S.; Wang, Z.; Zhao, H.; Qin, K.; Li, Z.; Hu, H. Inertial/Magnetic Sensors Based Pedestrian Dead Reckoning by Means of Multi-Sensor Fusion. Inf. Fusion 2018, 39, 108–119. [Google Scholar] [CrossRef]
- Ettlinger, A.; Retscher, G. Positioning using Ambient Magnetic Fields in Combination with Wi-Fi and RFID. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-Based Indoor Localization and Tracking With iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Higuchi, T.; Yamaguchi, H.; Higashino, T. Clearing a Crowd: Context-Supported Neighbor Positioning for People-Centric Navigation. In Pervasive Computing; Lecture Notes in Computer Science; Kay, J., Lukowicz, P., Tokuda, H., Olivier, P., Krüger, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7319, pp. 325–342. [Google Scholar] [CrossRef]
- Kloch, K.; Lukowicz, P.; Fischer, C. Collaborative PDR Localisation with Mobile Phones. In Proceedings of the 15th Annual International Symposium on Wearable Computers (ISWC), San Francisco, CA, USA, 12–15 June 2011; pp. 37–40. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Soatti, G.; Nicoli, M.; Savazzi, S.; Spagnolini, U. Consensus-Based Algorithms for Distributed Network-State Estimation and Localization. IEEE Trans. Signal Inf. Process. Netw. 2017, 3, 430–444. [Google Scholar] [CrossRef]
- Abadi, M.J.; Gu, Y.; Guan, X.; Wang, Y.; Hassan, M.; Chou, C.T. Improving Heading Accuracy in Smartphone-Based PDR Systems using Multi-Pedestrian Sensor Fusion. In Proceeding of the 4th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; p. 4. [Google Scholar]
- Chen, P.; Kuang, Y.; Chen, X. A UWB/Improved PDR Integration Algorithm Applied to Dynamic Indoor Positioning for Pedestrians. Sensors 2017, 17, 2065. [Google Scholar] [CrossRef]
- Abadi, M.J.; Luceri, L.; Hassan, M.; Chou, C.T.; Nicoli, M. A Collaborative Approach to Heading Estimation for Smartphone-based PDR Indoor Localisation. In Proceedings of the International Conference in Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014. [Google Scholar] [CrossRef]
- Stern, D.P. A Millennium of Geomagnetism. Rev. Geophys. 2002, 40. [Google Scholar] [CrossRef]
- Chapter Five Reversals of the Earth’s Magnetic Field. In The Earth’s Magnetic Field: Its History, Origin and Planetary Perspective; International Geophysics; Merrill, R.T., McElhinny, M.W., Eds.; Academic Press: Cambridge, MA, USA, 1983; Volume 32, pp. 135–168. [Google Scholar]
- Lee, J.G.; Park, C.G.; Park, H.W. Multiposition alignment of strapdown inertial navigation system. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 1323–1328. [Google Scholar] [CrossRef]
- Kaniewski, P.; Kazubek, J. Integrated System for Heading Determination. Acta Phys. Pol. A 2009, 116, 325. [Google Scholar] [CrossRef]
- Finlay, C.; Maus, S.; Beggan, C.; Bondar, T.; Chambodut, A.; Chernova, T.; Chulliat, A.; Golovkov, V.; Hamilton, B.; Hamoudi, M.; et al. International Geomagnetic Reference Field: The Eleventh Generation. Geophys. J. Int. 2010, 183, 1216–1230. [Google Scholar]
- Hall, M.A. Correlation-Based Feature Selection for Machine Learning. Ph.D Thesis, The University of Waikato, Hamilton, New Zealand, 1999. [Google Scholar]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I.H. The WEKA Data Mining Software: An Update. SIGKDD Explor. Newsl. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Abadi, M.J. GPS-Less Personal Tracking Using Smartphone Sensors. Ph.D. Thesis, University of New South Wales, Sydney, Australia, 2017. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Olfati-Saber, R.; Fax, J.; Murray, R. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. An Analysis of the Accuracy of Bluetooth Low Energy for Indoor Positioning Applications. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS Conference), Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Qualcomm Technologies Inc. LTE Direct Always-on Device-to-Device Proximal Discovery; Technical Report; Qualcomm: San Diego, CA, USA, 2014. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment ID | Corridor | Topology | Number of Steps (Length) | True Heading | |||
|---|---|---|---|---|---|---|---|
| U1 | U2 | U3 | U4 | ||||
| 1 | LG | A | 44 (26.4 m) | 99.18 | 99.18 | 99.18 | 99.18 |
| 2 | 44 (26.4 m) | 279.18 | 279.18 | 279.18 | 279.18 | ||
| 3 | B | 44 (26.4 m) | 99.18 | 99.18 | 99.18 | 279.18 | |
| 4 | 44 (26.4 m) | 279.18 | 279.18 | 279.18 | 99.18 | ||
| 5 | 44 (26.4 m) | 99.18 | 99.18 | 99.18 | 279.18 | ||
| 6 | 44 (26.4 m) | 279.18 | 279.18 | 279.18 | 99.18 | ||
| 7 | G | A | 42 (25.2 m) | 99.18 | 99.18 | 99.18 | 99.18 |
| 8 | 42 (25.2 m) | 279.18 | 279.18 | 279.18 | 279.18 | ||
| 9 | C | 42 (25.2 m) | 99.18 | 279.18 | 279.18 | 279.18 | |
| 10 | 42 (25.2 m) | 279.18 | 99.18 | 99.18 | 99.18 | ||
| 11 | 42 (25.2 m) | 99.18 | 279.18 | 279.18 | 279.18 | ||
| 12 | 42 (25.2 m) | 279.18 | 99.18 | 99.18 | 99.18 | ||
| Scenario ID | UNSW Building | True Heading | N of Users | N of Experiments |
|---|---|---|---|---|
| 1 | Library, 3rd Floor | 188.98 | 3 | 6 |
| 2 | Old Main Building, Ground Floor | 279.23 | 3 | 6 |
| 3 | Old Main Building, Ground Floor | 99.46 | 3 | 6 |
| 4 | Robert Webster Building, LG Floor | 99.26 | 3 | 6 |
| 5 | Robert Webster Building, LG Floor | 279.18 | 3 | 5 |
| 6 | ABS Building, 1st Floor | 99.26 | 3 | 6 |
| 7 | ABS Building, 1st Floor | 279.15 | 3 | 6 |
| 8 | Electrical Engineering Building, 2nd Floor | 98.90 | 3 | 6 |
| Accuracy (%) | |||||
|---|---|---|---|---|---|
| Support Vector Machine | Multi-Layer Perceptron | Decision Tree | K-Nearest Neighbour () | Logistic Regression | Naïve Bayes |
| 77.28 | 94.82 | 94.21 | 92.32 | 78.29 | 82.15 |
| Accuracy (%) | |||||
|---|---|---|---|---|---|
| Support Vector Machine | Multi-Layer Perceptron | Decision Tree | K-Nearest Neighbour () | Logistic Regression | Naïve Bayes |
| 90.37 | 90.66 | 90.90 | 90.17 | 90.37 | 88.83 |
| Experiment ID | Conventional PDR () | Cooperative () | |||
|---|---|---|---|---|---|
| DDF-W | DDF | MPD & DDF-W | MPD & DDF | ||
| 1 | 57 | 7.98 (6.19) | 16.78 (15.07) | 8.77 (8.03) | 4.73 (3.84) |
| 2 | 18.73 | 12.23 (11.7) | 5.03 (3.93) | 5.19 (4.94) | 2.03 (1.39) |
| 7 | 46.59 | 13.24 (4.11) | 26.59 (18.95) | 13.04 (6.61) | 9.75 (2.01) |
| 8 | 14.21 | 0.67 (0.55) | 7.24 (7.23) | 0.82 (0.81) | 1.83 (1.85) |
| 9 | 7.71 | 2.49 (1.68) | 5.56 (1.95) | 1.78 (1.78) | 1.61 (1.61) |
| 10 | 53 | 30.15 (25.97) | 51.44 (37.07) | 8.84 (5.76) | 8.84 (5.75) |
| 11 | 9.33 | 1.64 (1.79) | 3.15 (1.82) | 1.77 (1.77) | 1.77 (1.77) |
| 12 | 51.58 | 23.06 (17.28) | 40.70 (25.84) | 5.54 (5.01) | 5.85 (5.53) |
| Average | 32.27 | 11.42 (8.66) | 19.56 (13.98) | 5.72 (4.33) | 4.55 (2.97) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jalal Abadi, M.; Luceri, L.; Hassan, M.; Chou, C.T.; Nicoli, M. A Cooperative Machine Learning Approach for Pedestrian Navigation in Indoor IoT. Sensors 2019, 19, 4609. https://doi.org/10.3390/s19214609
Jalal Abadi M, Luceri L, Hassan M, Chou CT, Nicoli M. A Cooperative Machine Learning Approach for Pedestrian Navigation in Indoor IoT. Sensors. 2019; 19(21):4609. https://doi.org/10.3390/s19214609
Chicago/Turabian StyleJalal Abadi, Marzieh, Luca Luceri, Mahbub Hassan, Chun Tung Chou, and Monica Nicoli. 2019. "A Cooperative Machine Learning Approach for Pedestrian Navigation in Indoor IoT" Sensors 19, no. 21: 4609. https://doi.org/10.3390/s19214609
APA StyleJalal Abadi, M., Luceri, L., Hassan, M., Chou, C. T., & Nicoli, M. (2019). A Cooperative Machine Learning Approach for Pedestrian Navigation in Indoor IoT. Sensors, 19(21), 4609. https://doi.org/10.3390/s19214609