Autonomous 3D Exploration of Large Structures Using an UAV Equipped with a 2D LIDAR

 , , and
, , and
Abstract
:1. Introduction
2. Related Work
3. Methods
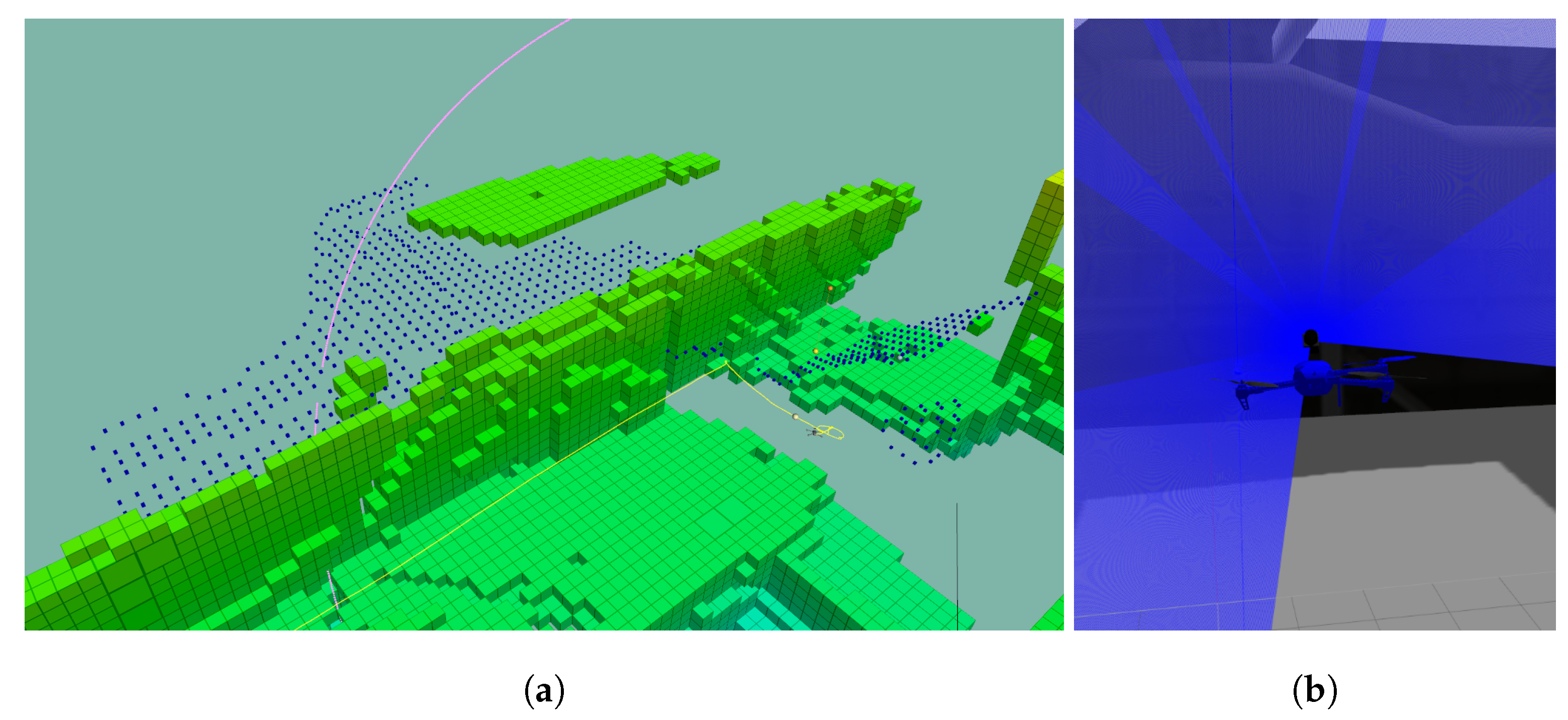
3.1. Sparse Occupancy Grid
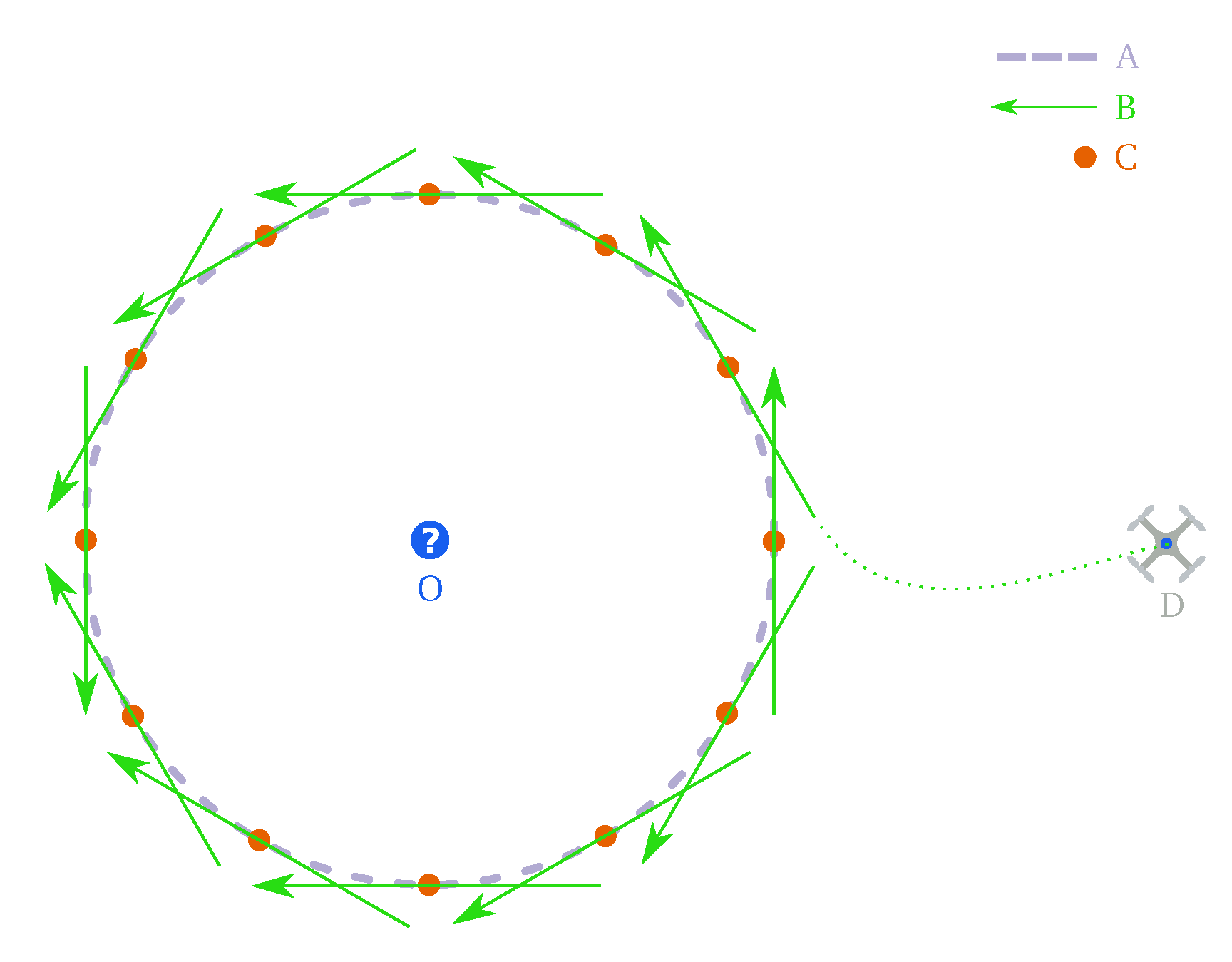
3.2. Sampling: Flyby Manoeuvre
3.3. Path Planning
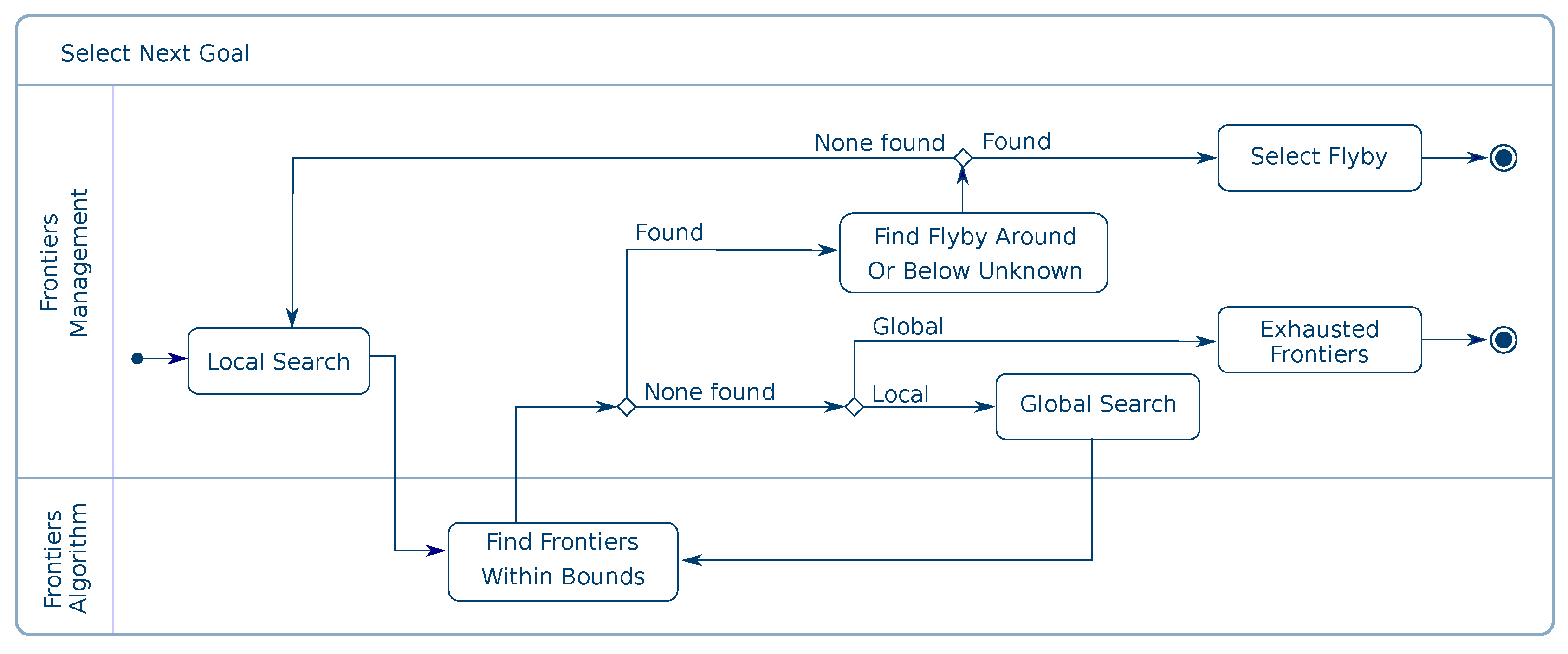
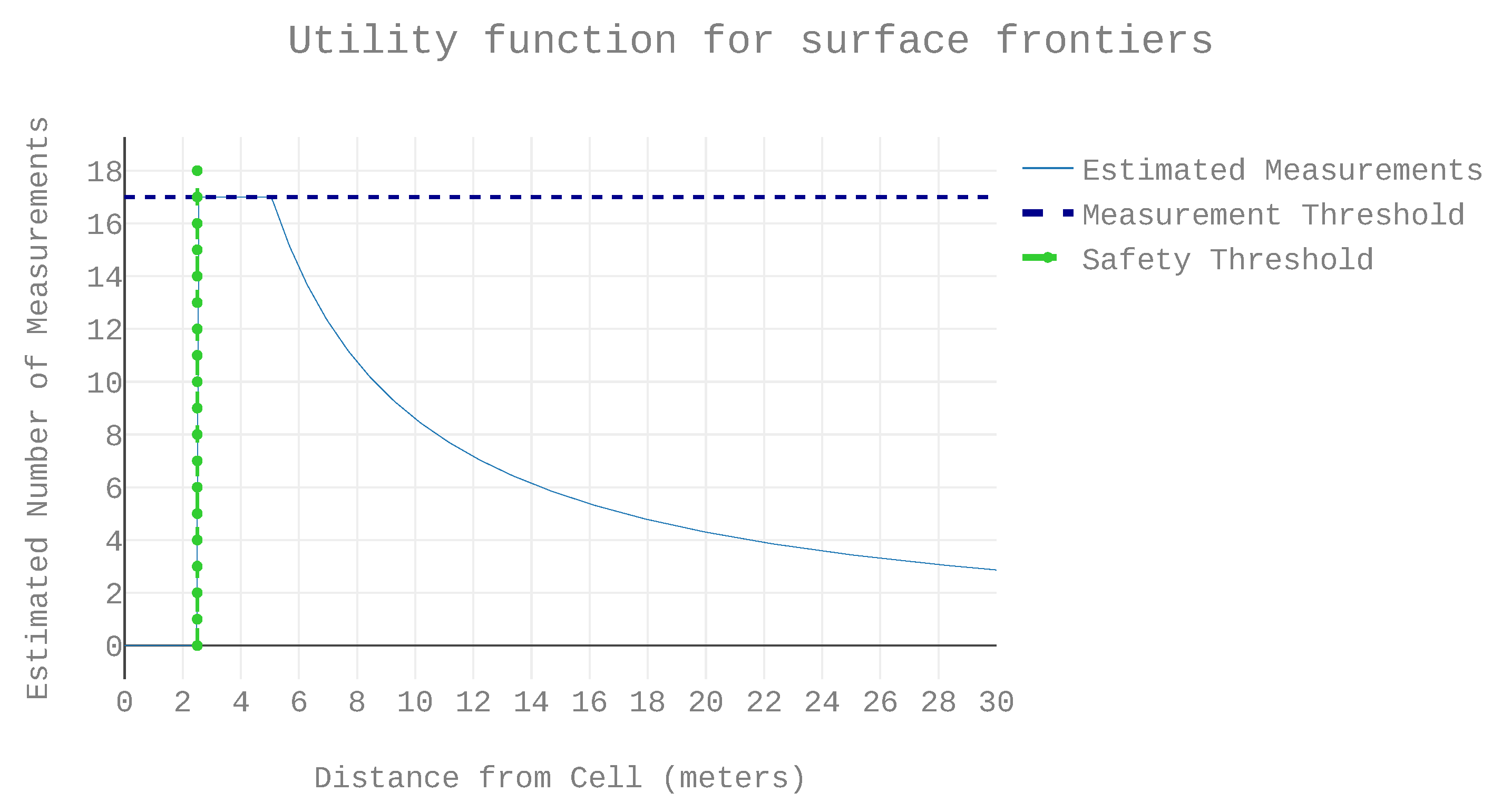
3.4. Frontier Algorithm
3.5. Exploration
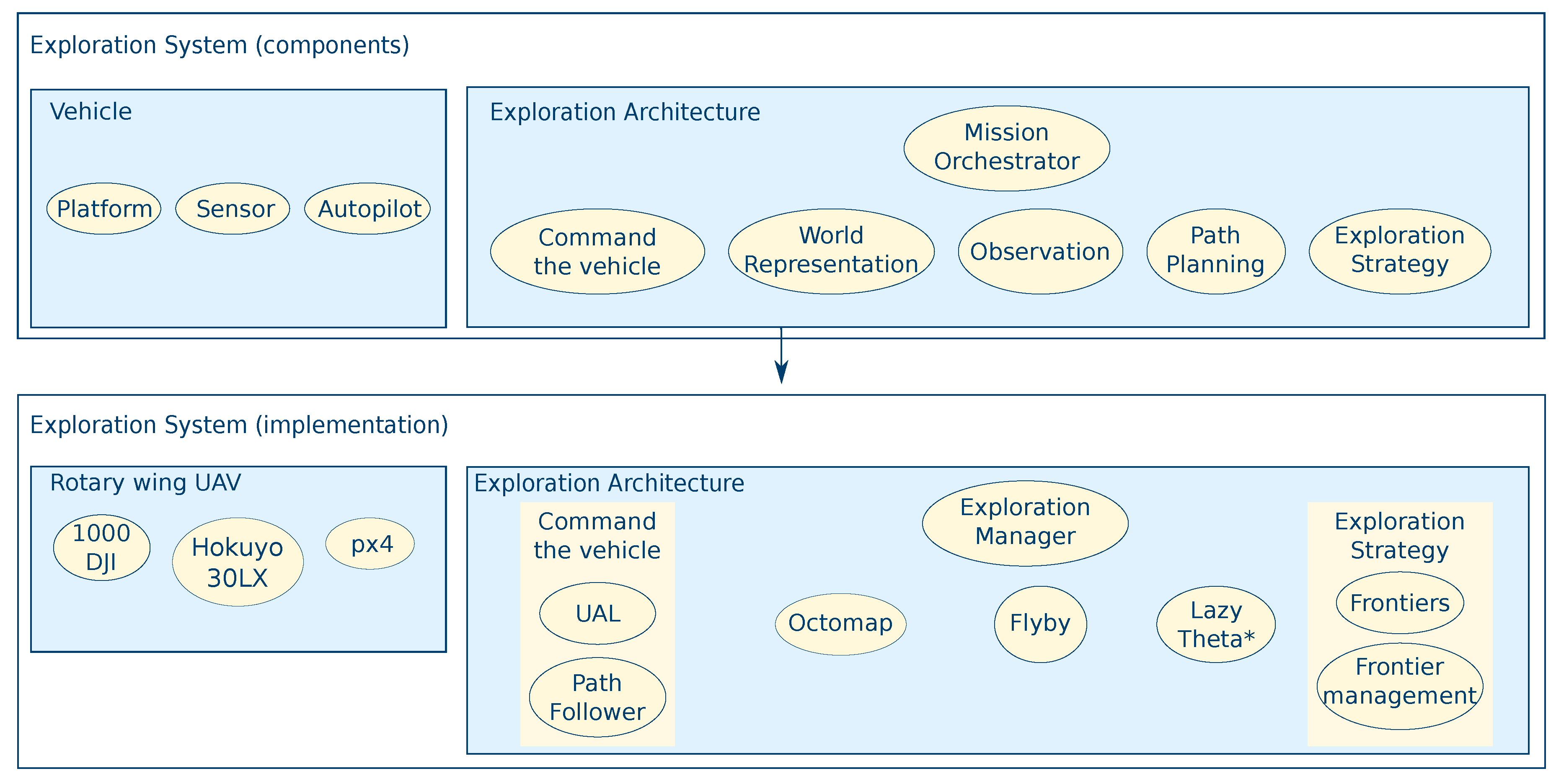
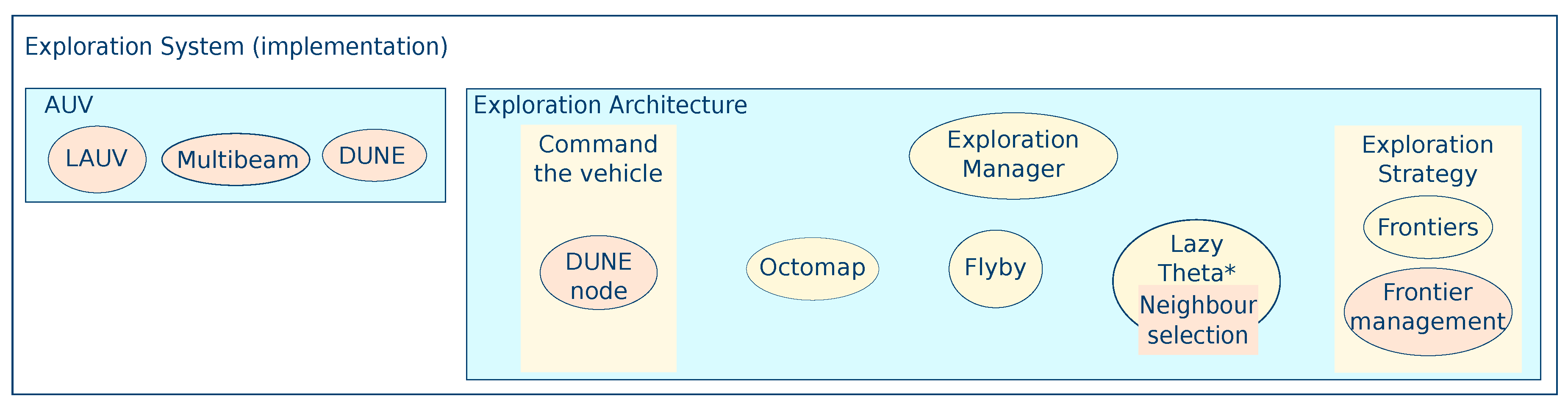
4. System Architecture
- Sensor: The sensor is a Hokuyo 30LX 2D laser sensor with a range of 30 m;
- Software for basic commands execution:
- -
- UAL (UAV Abstraction Layer): A software-interface for hardware abstraction [47] which handles the standard commands to control the vehicle such as velocity control, taking-off, and landing;
- -
- Path Follower: Software to follow a waypoint sequence [48], while also adjusting vehicle yaw, so that in every segment the Hokuyo sensor is aligned with the movement.
- Octomap: Occupancy octree for world representation using the octomap framework [42], as previously detailed in Section 3.1. The world representation is shared among all the components;
- Flyby manoeuvre: The manoeuvre executed to collect data around the target to gather 3D information with the 2D laser, as described in Section 3.2;
- Path Planning: The Lazy Theta* any-angle deterministic planner proposed by [43] and adapted in previous work of the authors [44] due to the advantages mentioned in Section 3.3;
- Exploration Strategy:
- -
- Frontier Algorithm: The classical and widely-used frontier exploration algorithm presented in [28]; The implementation used is an extension of [49], that generates neighbours taking the sensor range into account as presented in Section 3.4;
- -
- Frontier Management: Combines and orders the operational requirements, such as safety distance, observation manoeuvre visibility, or obstacle detection, with exploration optimisation. The characteristics presented in Section 3.5 are incorporated in this component.
- Exploration Manager: Orchestrates all other components to achieve the high-level mission goal of the whole-scenario exploration.
4.1. Exploration Manager
4.2. Frontier Algorithm
Frontier Manager
4.3. Operator Interaction
4.4. Modular Approach and Re-Usability
5. Simulation Testbed
5.1. Comparison with State of the Art Approaches
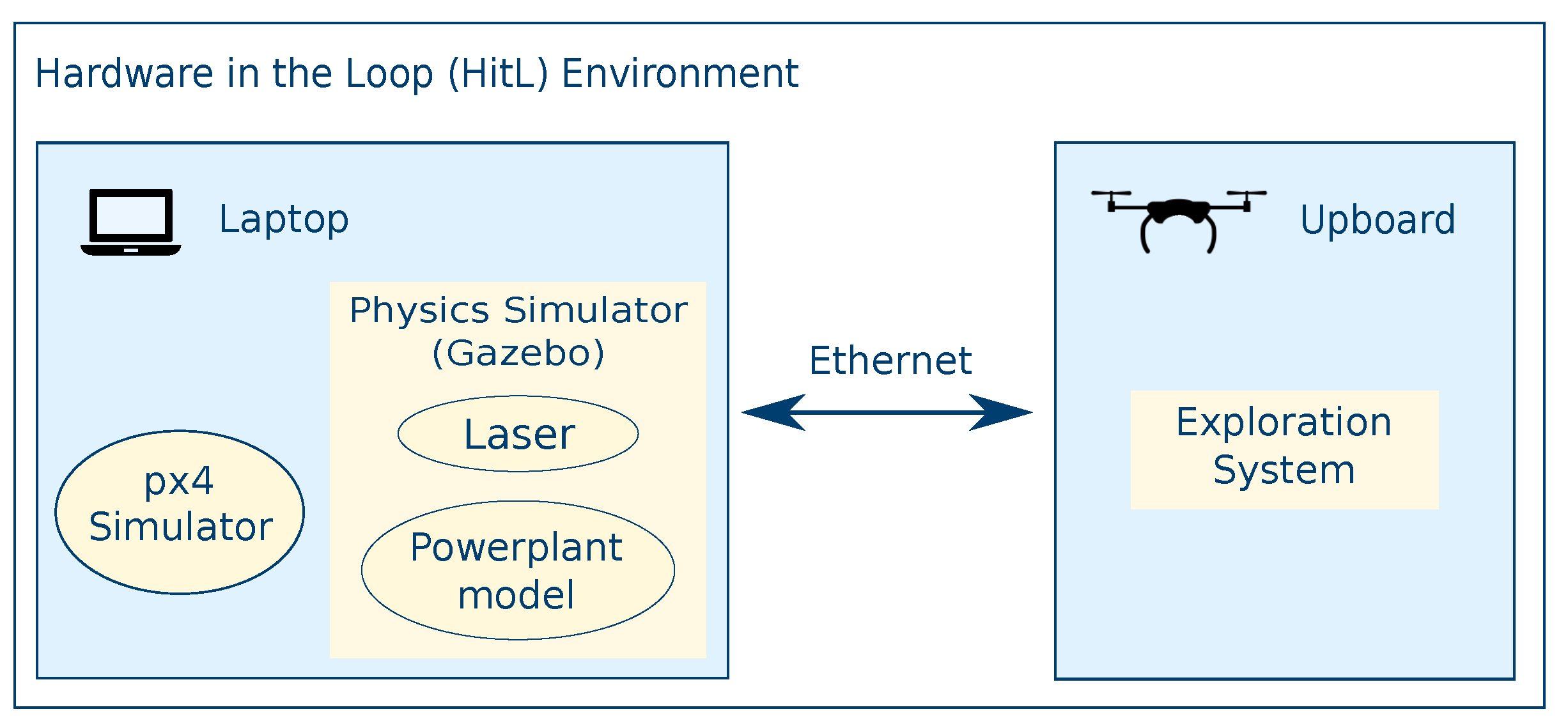
5.2. Hardware in the Loop
- Platform: A 1000 DJI frame with sufficient payload to mount all the necessary hardware: A 5.8 GHz wireless communication Ubiquiti® Rocket, the autopilot, the on-board processor, and the sensor;
- On-board processor An UpBoard with an Intel® AtomTMx5;
- Sensor: The sensor is a Hokuyo 30LX laser sensor with an aperture of 270° and a range if 30 m, mounted with a 50° pitch;
- Autopilot: The Pixhawk v1’s autopilot px4 provides software-in-the-loop capabilities that simulate the vehicle’s movements during the tests;
- Support laptop: A OMEN HP-15-ce020ns equipped with an Intel® CoreTM i7-7700HQ.
5.3. Test Setup
Metrics
- The exploration time;
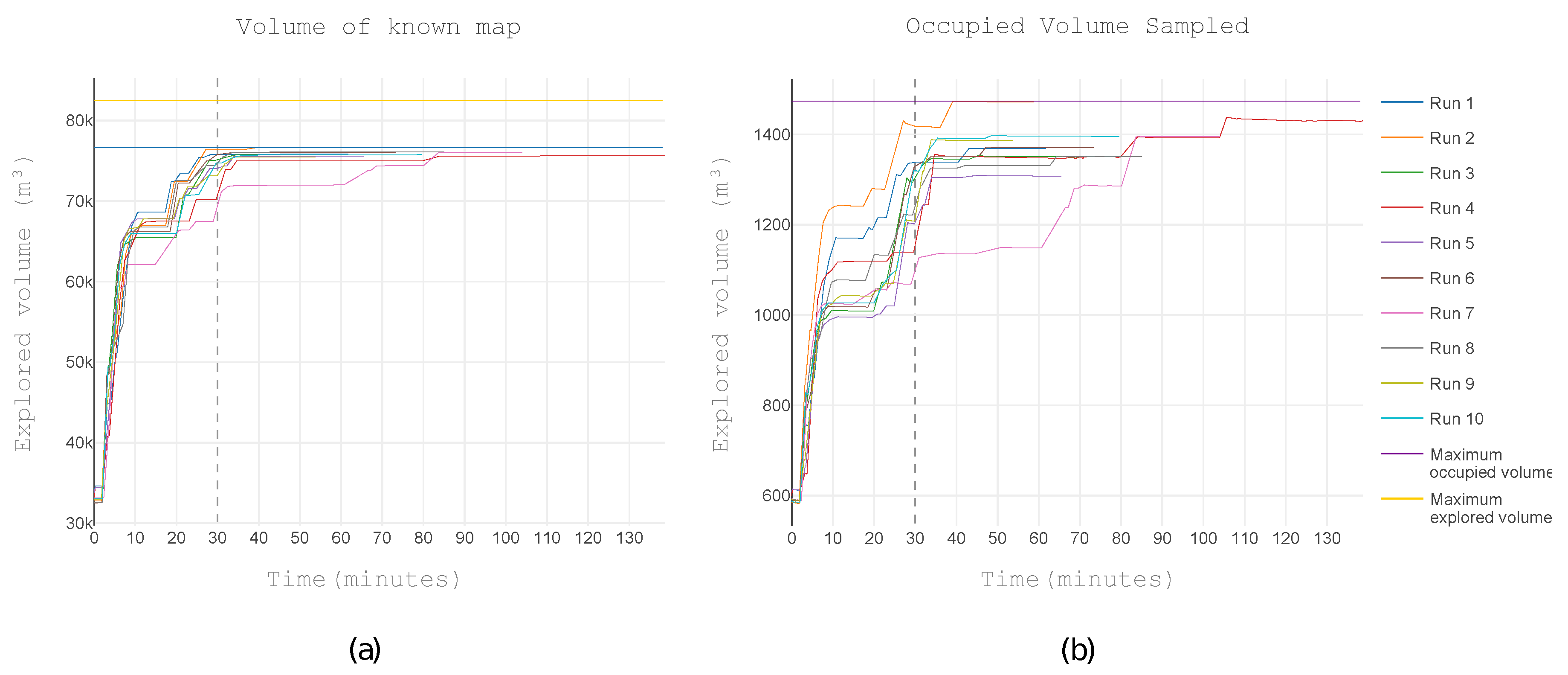
- The volume explored;
- The resulting map contextualised with the flight path;
- The path length of the flight path;
- The evolution of occupied space during the mission;
- The time spent in path planning;
- The rate of success of path planner;
- The average execution time per view;
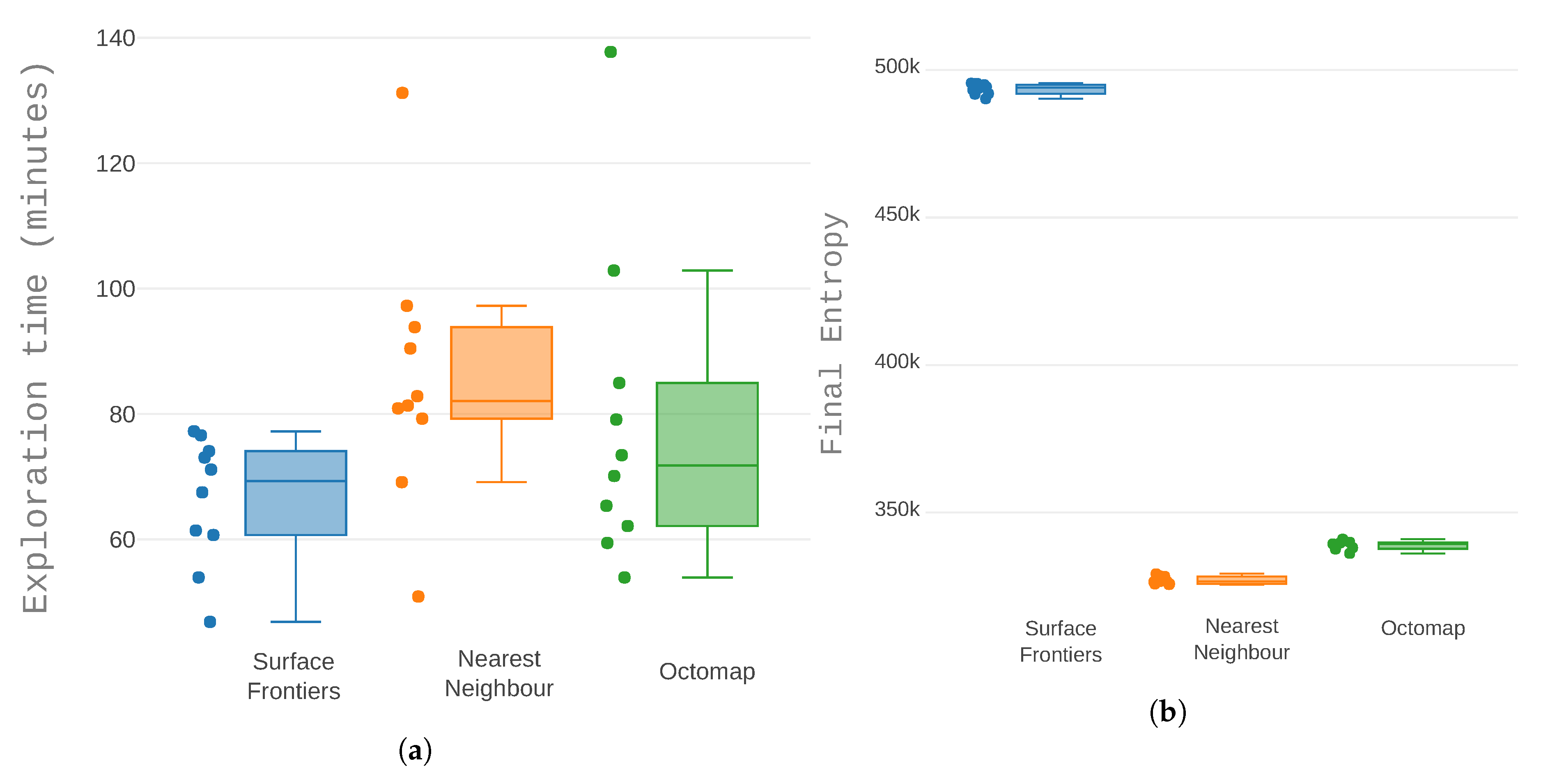
- Entropy of the map in the final iteration.
6. Results and Discussion
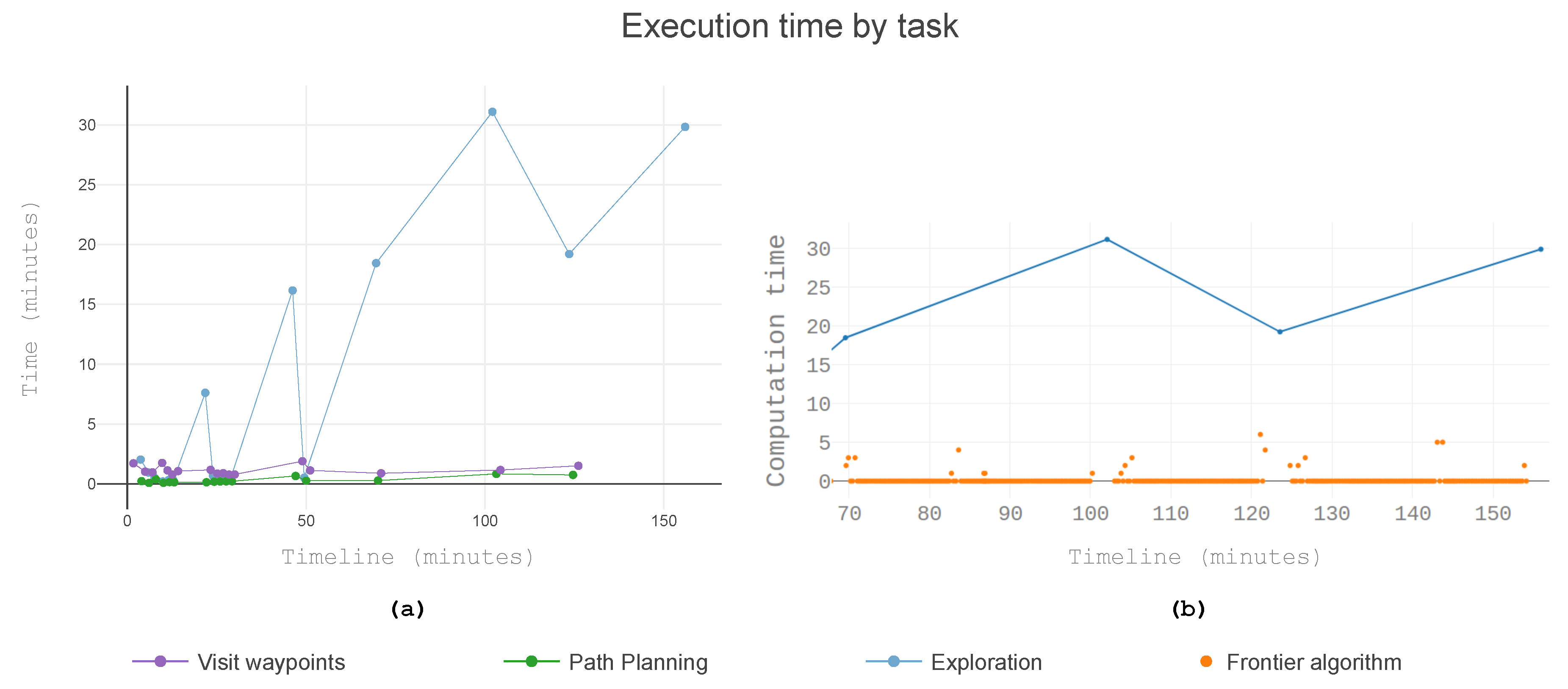
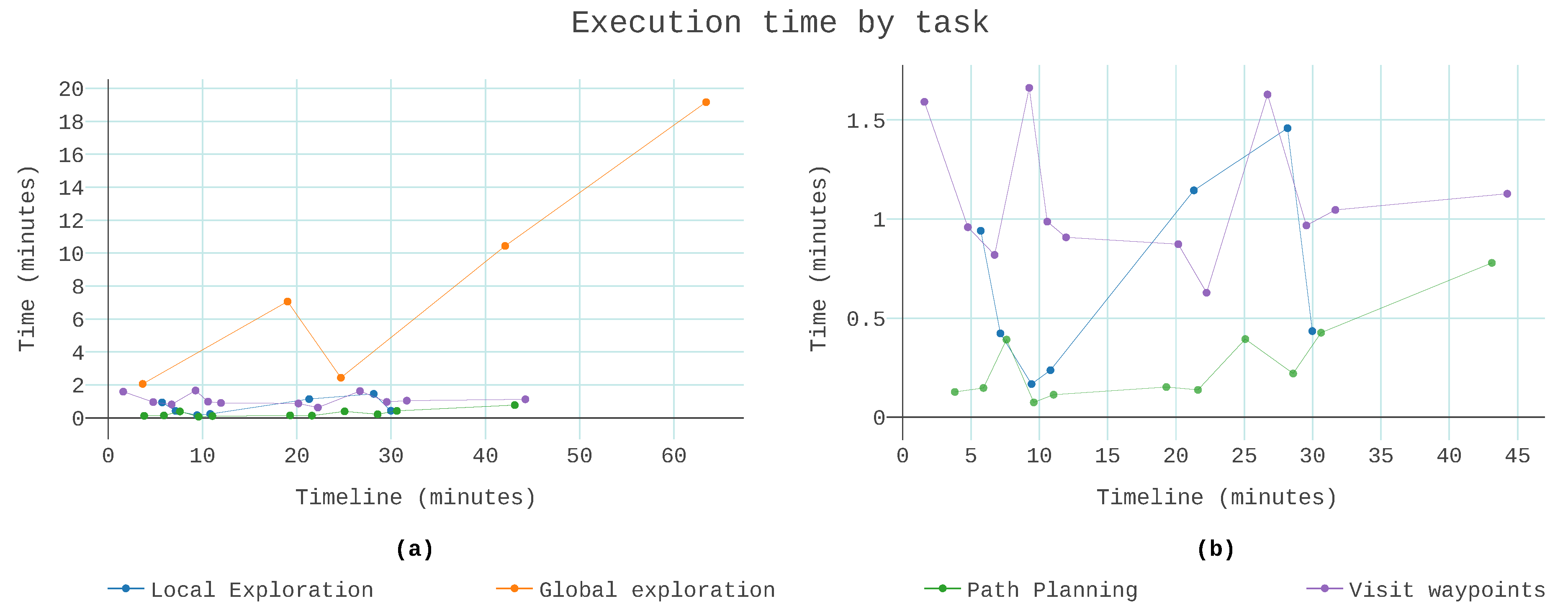
6.1. Execution Time
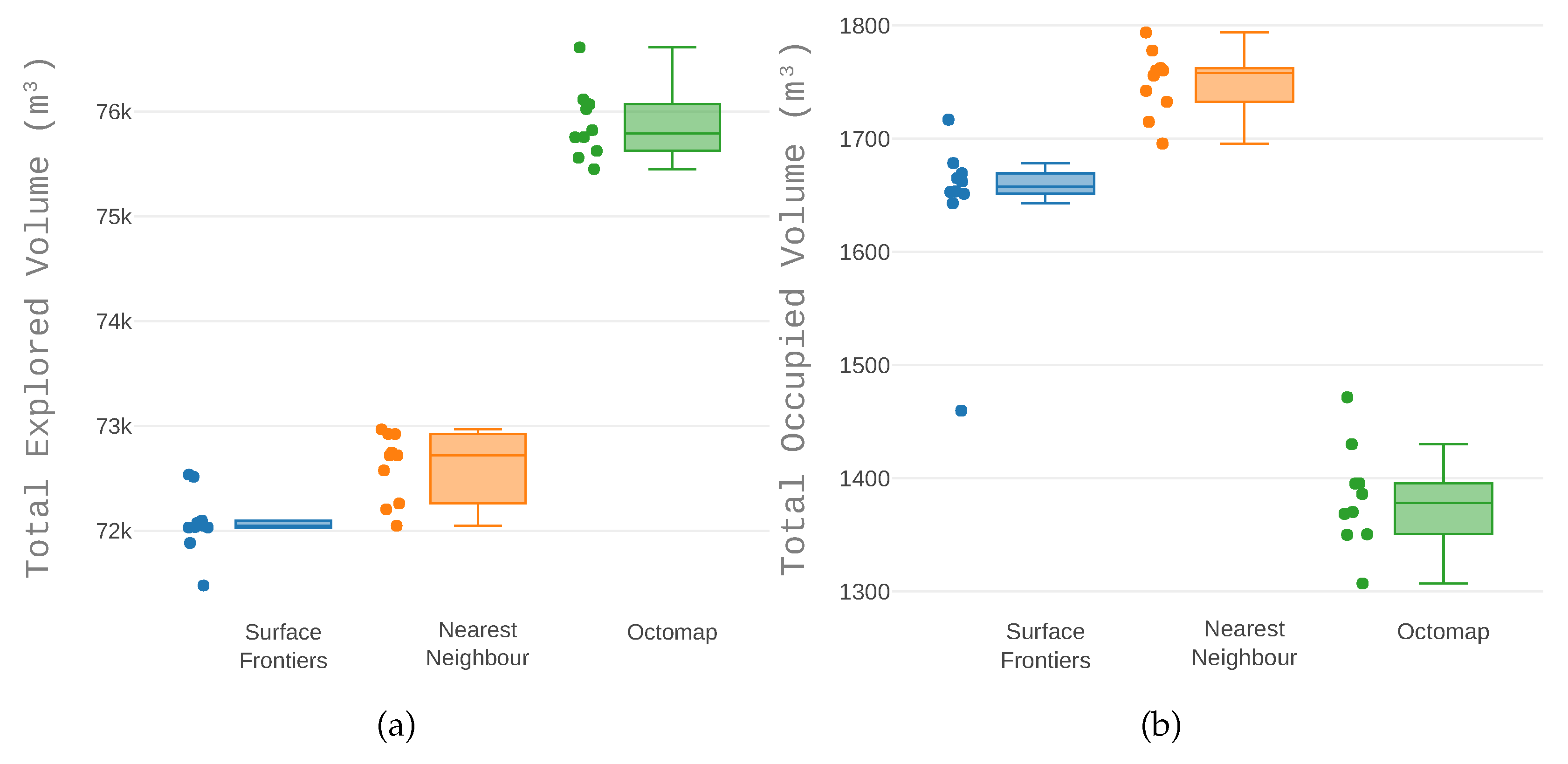
6.2. Volume Explored
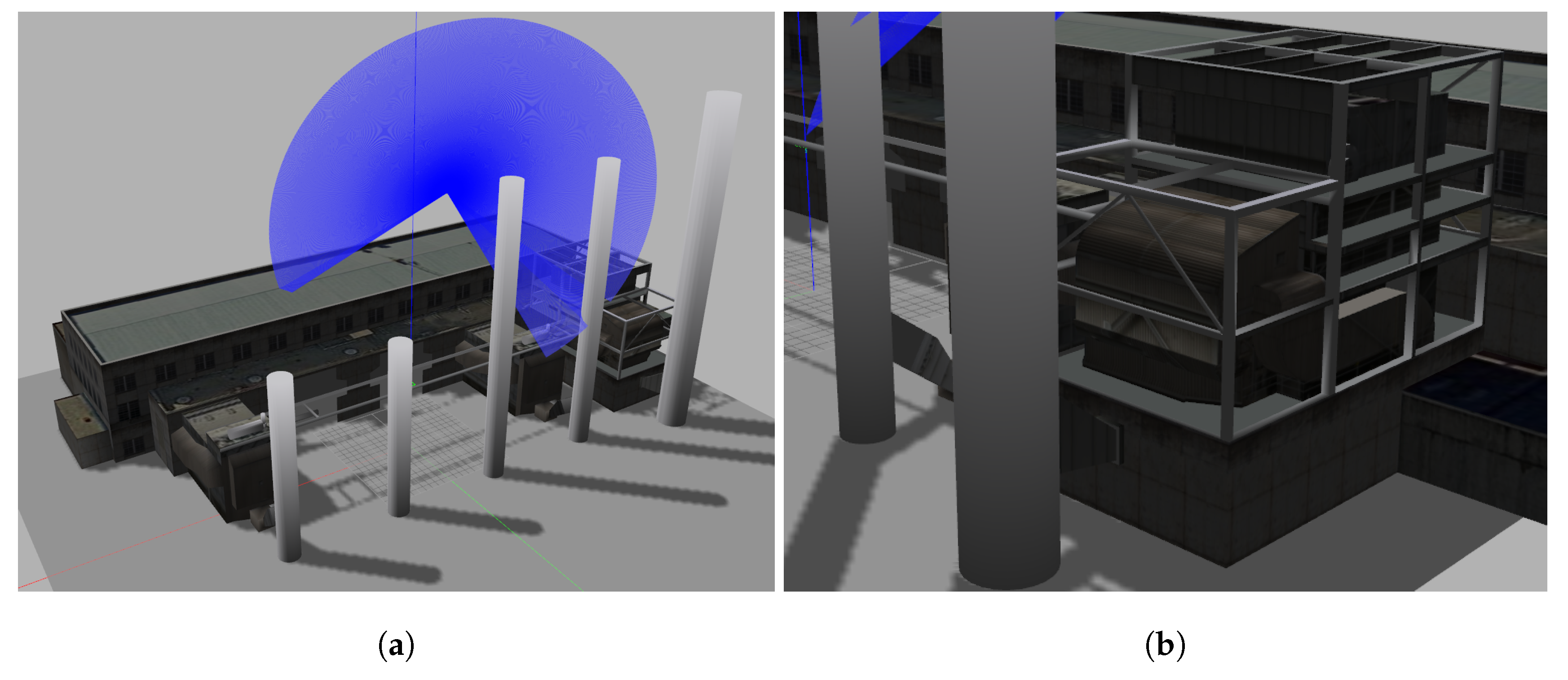
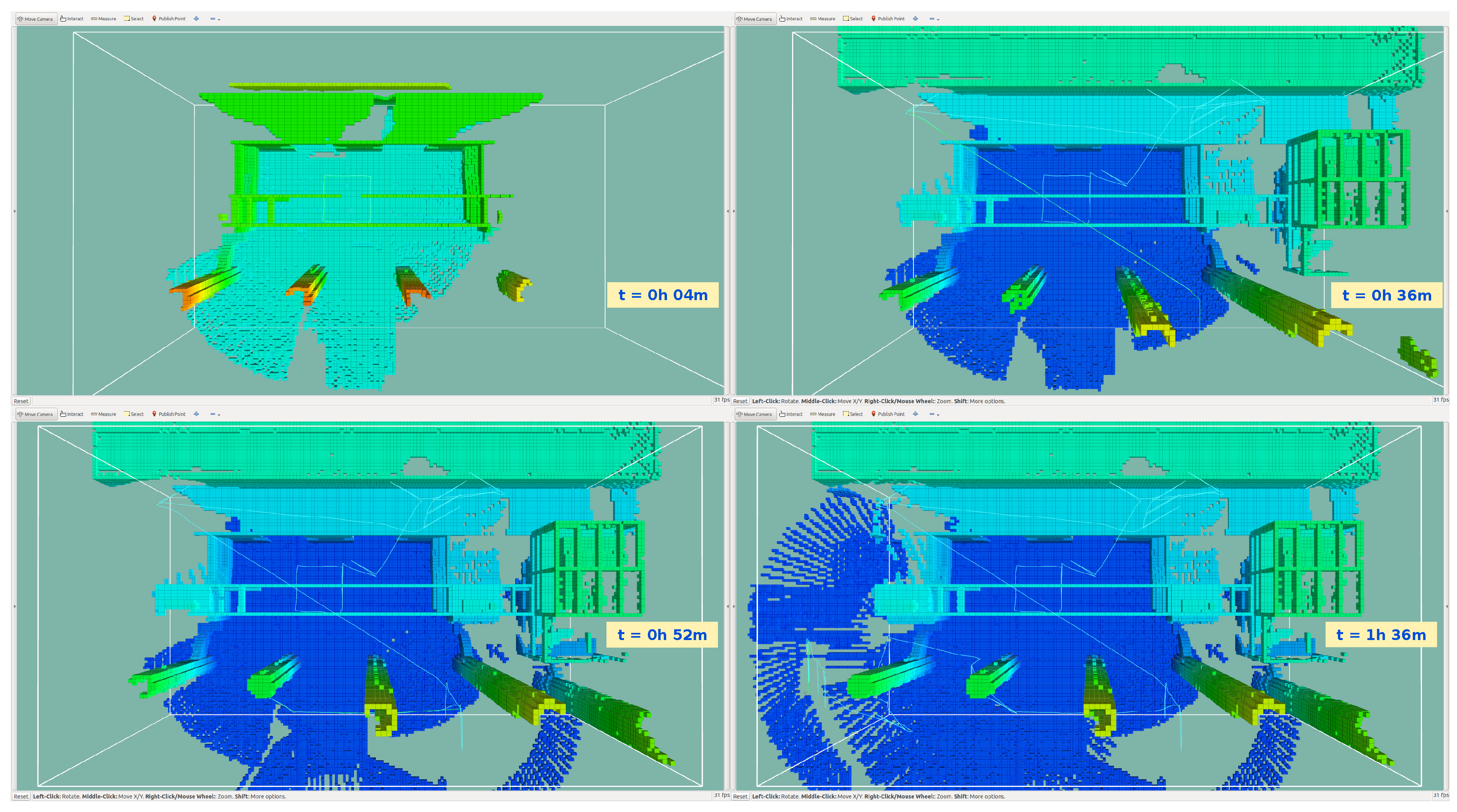
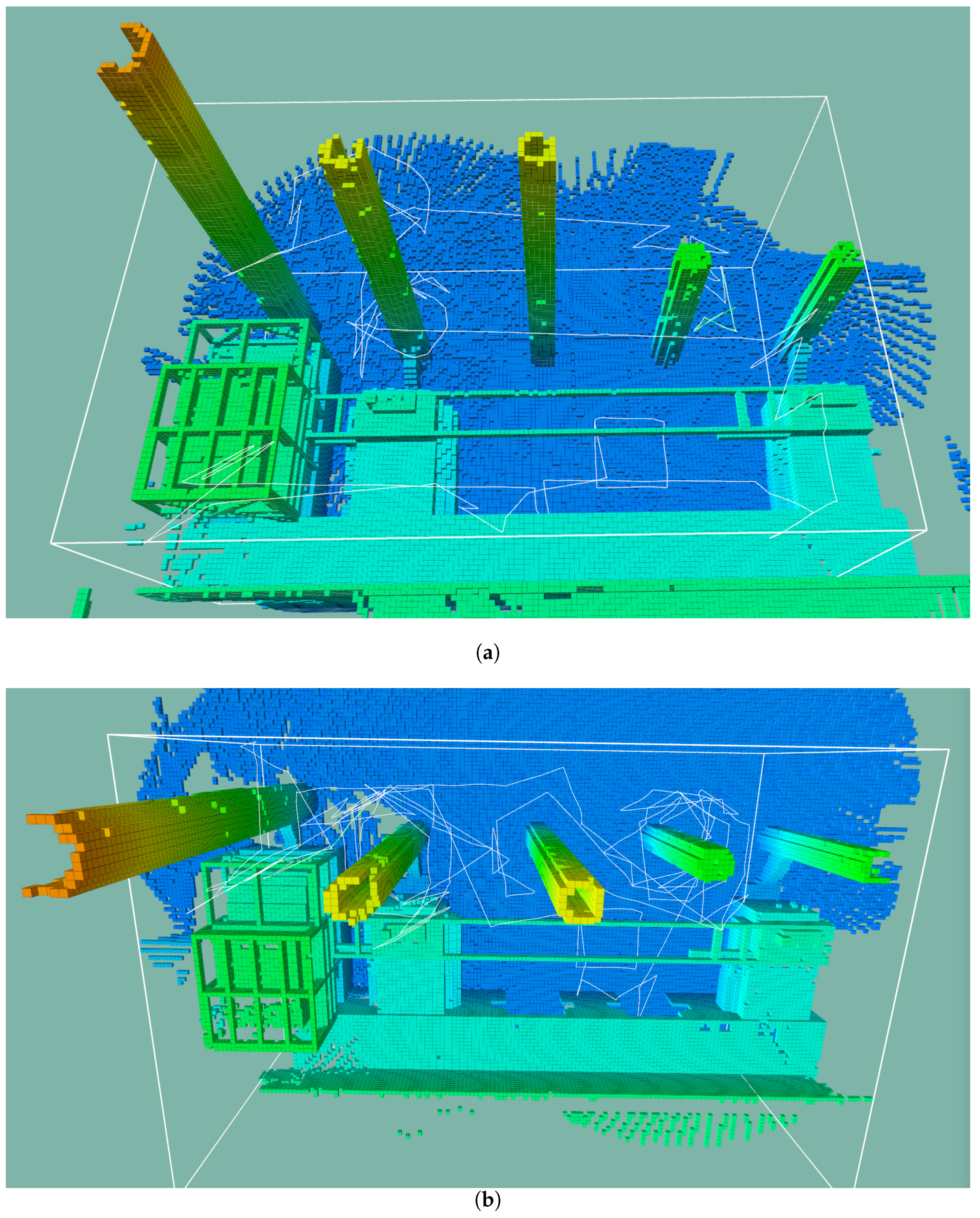
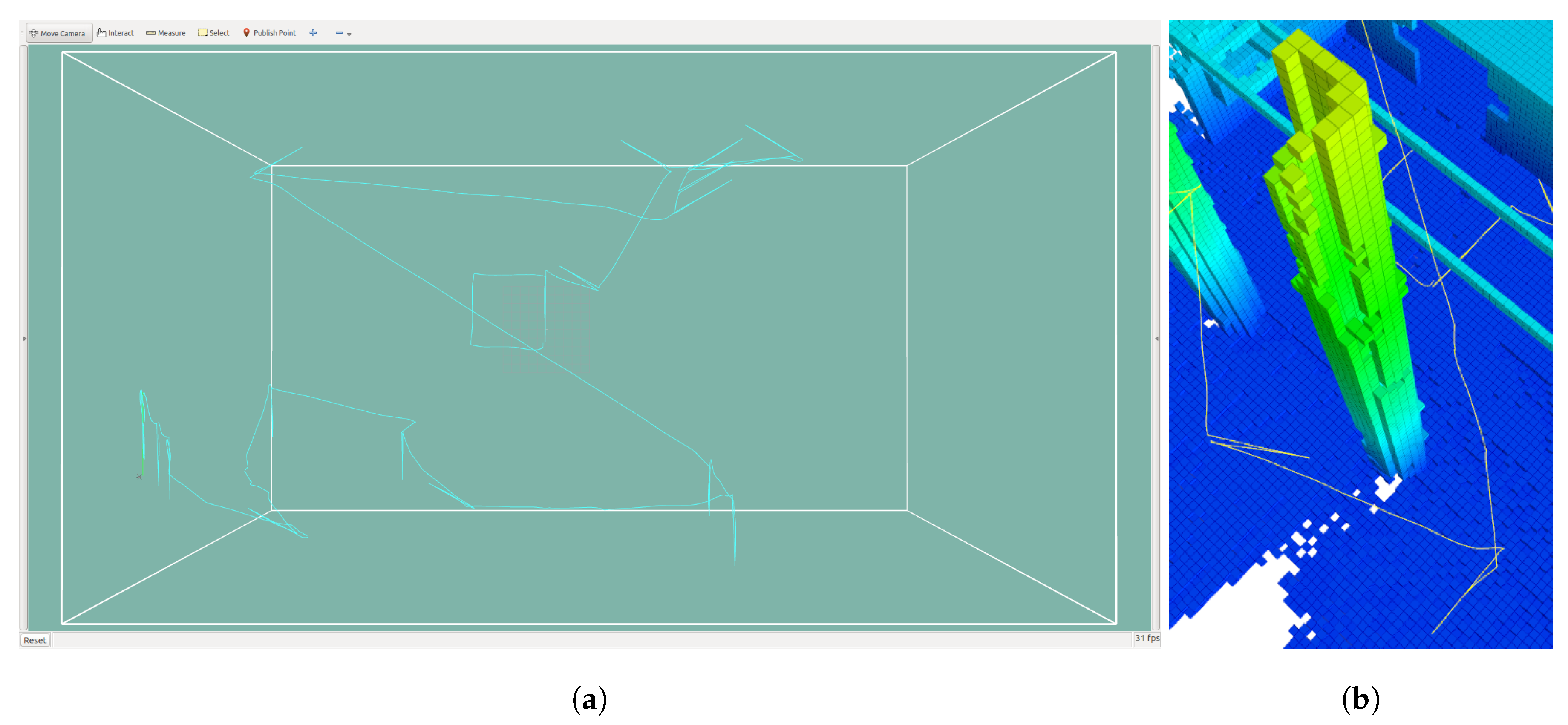
6.3. Flight Path
- The final flight plans could cover an average of 92% of the search space. However, instead of an area, this is now the target volume;
- The region was filled out without overlapping paths;
- The paths were continuous and sequential without any repetition, although its execution was not continuous in time. One exception was made on the observation manoeuvres where the segment had flown both ways to add redundancy of samples;
- The vehicle could avoid all the obstacles, with the added restriction of considering the unknown space as an obstacle;
- Only simple motion trajectories were used, in this case, straight lines;
- The path was not guaranteed to be optimal in length or execution time. However, it achieved the goal of dispensing prior knowledge in less time than it would take the human operator to plan the path and fly the UAV, while also avoiding gaps in the coverage.
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ferreira, A.S.; Costa, M.; Py, F.; Pinto, J.; Silva, M.A.; Nimmo-Smith, A.; Johansen, T.A.; de Sousa, J.B.; Rajan, K. Advancing multi-vehicle deployments in oceanographic field experiments. Auton. Robots 2019, 43, 1555–1574. [Google Scholar] [CrossRef]
- Guerra, A.G.; Ferreira, A.S.; Costa, M.; Nodar-López, D.; Aguado Agelet, F. Integrating small satellite communication in an autonomous vehicle network: A case for oceanography. Acta Astronaut. 2018, 145, 229–237. [Google Scholar] [CrossRef] [Green Version]
- Sousa, L.L.; López-Castejón, F.; Gilabert, J.; Relvas, P.; Couto, A.; Queiroz, N.; Caldas, R.; Dias, P.S.; Dias, H.; Faria, M.; et al. Integrated Monitoring of Mola mola Behaviour in Space and Time. PLoS ONE 2016, 11, e0160404. [Google Scholar] [CrossRef] [PubMed]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Basilico, N.; Carpin, S. Deploying teams of heterogeneous UAVs in cooperative two-level surveillance missions. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 610–615. [Google Scholar] [CrossRef]
- Fortuna, J.; Ferreira, F.; Gomes, R.; Ferreira, A.S.; Sousa, J.B. Using Low Cost Open Source UAVs for Marine Wild Life Monitoring—Field Report. IFAC Proc. Vol. 2013, 46, 291–295. [Google Scholar] [CrossRef]
- Acevedo, J.J.; Arrue, B.C.; Maza, I.; Ollero, A. A decentralized algorithm for area surveillance missions using a team of aerial robots with different sensing capabilities. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 4735–4740. [Google Scholar] [CrossRef]
- Balampanis, F.; Maza, I.; Ollero, A. Coastal Areas Division and Coverage with Multiple UAVs for Remote Sensing. Sensors 2017, 17, 808–832. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; de Dios, J.M.; Maza, I.; Ollero, A. An Unmanned Aircraft System for Automatic Forest Fire Monitoring and Measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Pham, H.X.; La, H.M.; Feil-Seifer, D.; Deans, M.C. A Distributed Control Framework of Multiple Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Kondak, K.; Ollero, A.; Maza, I.; Krieger, K.; Albu-Schaeffer, A.; Schwarzbach, M.; Laiacker, M. Unmanned Aerial Systems Physically Interacting with the Environment: Load Transportation, Deployment, and Aerial Manipulation. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 2755–2785. [Google Scholar] [CrossRef]
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous transportation and deployment with aerial robots for search and rescue missions. J. Field Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef] [Green Version]
- Heng, L.; Gotovos, A.; Krause, A.; Pollefeys, M. Efficient visual exploration and coverage with a micro aerial vehicle in unknown environments. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1071–1078. [Google Scholar] [CrossRef]
- Shen, S.; Michael, N.; Kumar, V. Stochastic differential equation-based exploration algorithm for autonomous indoor 3D exploration with a micro-aerial vehicle. Int. J. Robot. Res. 2012, 31, 1431–1444. [Google Scholar] [CrossRef]
- Charrow, B.; Kahn, G.; Patil, S.; Liu, S.; Goldberg, K.; Abbeel, P.; Michael, N.; Kumar, V. Information-Theoretic Planning with Trajectory Optimization for Dense 3D Mapping. In Robotics: Science and Systems XI; Robotics, Science and Systems Foundation: Rome, Italy, 2015. [Google Scholar] [CrossRef]
- Popovic, M.; Vidal-Calleja, T.; Hitz, G.; Chung, J.J.; Sa, I.; Siegwart, R.; Nieto, J. An informative path planning framework for UAV-based terrain monitoring. arXiv 2018, arXiv:1809.03870. [Google Scholar]
- Maza, I.; Caballero, F.; Capitan, J.; de Dios, J.M.; Ollero, A. A Distributed Architecture for a Robotic Platform with Aerial Sensor Transportation and Self-Deployment Capabilities. J. Field Robot. 2011, 28, 303–328. [Google Scholar] [CrossRef]
- Bircher, A.; Kamel, M.; Alexis, K.; Oleynikova, H.; Siegwart, R. Receding horizon path planning for 3D exploration and surface inspection. Auton. Robots 2018, 42, 291–306. [Google Scholar] [CrossRef]
- Papachristos, C.; Khattak, S.; Alexis, K. Autonomous exploration of visually-degraded environments using aerial robots. In International Conference on Unmanned Aircraft Systems; IEEE: Miami, FL, USA, 2017; pp. 775–780. [Google Scholar] [CrossRef]
- Papachristos, C.; Khattak, S.; Alexis, K. Uncertainty-aware receding horizon exploration and mapping using aerial robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 4568–4575. [Google Scholar] [CrossRef]
- Palazzolo, E.; Stachniss, C. Effective Exploration for MAVs Based on the Expected Information Gain. Drones 2018, 2, 9. [Google Scholar] [CrossRef]
- Sanchez-Cuevas, P.; Ramon-Soria, P.; Arrue, B.; Ollero, A.; Heredia, G. Robotic System for Inspection by Contact of Bridge Beams Using UAVs. Sensors 2019, 19, 305. [Google Scholar] [CrossRef]
- Yoder, L.; Scherer, S. Autonomous Exploration for Infrastructure Modeling with a Micro Aerial Vehicle. In Springer Tracts in Advanced Robotics; Wettergreen, D.S., Barfoot, T.D., Eds.; Springer Tracts in Advanced Robotics; Springer: Cham, Switzerland, 2016; Volume 113, pp. 427–440. [Google Scholar] [CrossRef]
- Mascarich, F.; Wilson, T.; Papachristos, C.; Alexis, K. Radiation Source Localization in GPS-Denied Environments Using Aerial Robots. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6537–6544. [Google Scholar] [CrossRef]
- González-Baños, H.H.; Latombe, J.C. Navigation Strategies for Exploring Indoor Environments. Int. J. Robot. Res. 2002, 21, 829–848. [Google Scholar] [CrossRef]
- Song, S.; Jo, S. Surface-Based Exploration for Autonomous 3D Modeling. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Yamauchi, B. A frontier-based approach for autonomous exploration. In Proceedings of the 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA’97), ’Towards New Computational Principles for Robotics and Automation’, Monterey, CA, USA, 10–11 July 1997; pp. 146–151. [Google Scholar] [CrossRef]
- Cieslewski, T.; Kaufmann, E.; Scaramuzza, D. Rapid exploration with multi-rotors: A frontier selection method for high speed flight. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2135–2142. [Google Scholar] [CrossRef]
- Witting, C.; Fehr, M.; Bähnemann, R.; Oleynikova, H.; Siegwart, R. History-aware Autonomous Exploration in Confined Environments using MAVs. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Oleynikova, H.; Taylor, Z.; Siegwart, R.; Nieto, J. Safe Local Exploration for Replanning in Cluttered Unknown Environments for Microaerial Vehicles. IEEE Robot. Autom. Lett. 2018, 3, 1474–1481. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Meng, L.; Li, T.; De Silva, C.W.; Meng, M.Q. Towards autonomous exploration with information potential field in 3D environments. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; pp. 340–345. [Google Scholar] [CrossRef]
- Juliá, M.; Gil, A.; Reinoso, O. A comparison of path planning strategies for autonomous exploration and mapping of unknown environments. Auton. Robots 2012, 33, 427–444. [Google Scholar] [CrossRef]
- Lau, H. Behavioural approach for multi-robot exploration. In Australasian Conference on Robotics and Automation; Australian Robotics and Automation Association Inc.: Sydney, Australia, 2003. [Google Scholar]
- Burgard, W.; Moors, M.; Fox, D.; Simmons, R.; Thrun, S. Collaborative multi-robot exploration. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 476–481. [Google Scholar] [CrossRef]
- Zlot, R.; Stentz, A.; Dias, M.; Thayer, S. Multi-robot exploration controlled by a market economy. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 3016–3023. [Google Scholar]
- Makarenko, A.; Williams, S.; Bourgault, F.; Durrant-Whyte, H. An experiment in integrated exploration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and System, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 534–539. [Google Scholar] [CrossRef]
- Juliá, M.; Reinoso, Ó.; Gil, A.; Ballesta, M.; Payá, L. A hybrid solution to the multi-robot integrated exploration problem. Eng. Appl. Artif. Intell. 2010, 23, 473–486. [Google Scholar] [CrossRef]
- Delmerico, J.; Isler, S.; Sabzevari, R.; Scaramuzza, D. A comparison of volumetric information gain metrics for active 3D object reconstruction. Auton. Robots 2018, 42, 197–208. [Google Scholar] [CrossRef]
- Rekleitis, I.; Bedwani, J.; Dupuis, E. Autonomous planetary exploration using LIDAR data. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3025–3030. [Google Scholar] [CrossRef]
- Kaufman, E.; Takami, K.; Ai, Z.; Lee, T. Autonomous Quadrotor 3D Mapping and Exploration Using Exact Occupancy Probabilities. In Proceedings of the 2018 Second IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 31 January–2 February 2018; pp. 49–55. [Google Scholar] [CrossRef]
- Wurm, K.M.; Hornung, A.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: A probabilistic, flexible, and compact 3D map representation for robotic systems. In Proceedings of the ICRA 2010 Workshop on Best Practice in 3D Perception and Modeling for Mobile Manipulation, Anchorage, AK, USA, 3–7 May 2010; pp. 403–412. [Google Scholar]
- Nash, A.; Koenig, S.; Tovey, C. Lazy Theta*: Any-Angle Path Planning and Path Length Analysis in 3D. In Proceedings of the Third Annual Symposium on Combinatorial Search (SOCS-10), Atlanta, GA, USA, 8–10 July 2010; pp. 153–154. [Google Scholar]
- Faria, M.; Marín, R.; Popović, M.; Maza, I.; Viguria, A. Efficient Lazy Theta* Path Planning over a Sparse Grid to Explore Large 3D Volumes with a Multirotor UAV. Sensors 2019, 19, 174. [Google Scholar] [CrossRef] [PubMed]
- Faria, M.; Maza, I.; Viguria, A. Applying Frontier Cells Based Exploration and Lazy Theta* Path Planning over Single Grid-Based World Representation for Autonomous Inspection of Large 3D Structures with an UAS. J. Intell. Robot. Syst. 2019, 93, 113–133. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 17 May 2009. [Google Scholar]
- Real, F.; Torres-Gonzalez, A.; Soria, P.R.; Capitán, J.; Ollero, A. UAL: An abstraction layer for unmanned vehicles. In Proceedings of the 2nd International Symposium on Aerial Robotics (ISAR), Philadelphia, PA, USA, 11–12 June 2018. [Google Scholar]
- Perez-Leon, H.; Acevedo, J.J.; Millan-Romera, J.A.; Castillejo-Calle, A.; Maza, I.; Ollero, A. An aerial robot path follower based on the ’Carrot chasing’ algorithm. In Proceedings of the Fourth Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019. [Google Scholar]
- Faria, M.; Maza, I.; Viguria, A. Analysis of data structures and exploration techniques applied to large 3D marine structures using UAS. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1277–1284. [Google Scholar] [CrossRef]
- Pinto, J.; Dias, P.S.; de Sousa, J.B. Coordinated Operation of Multiple AUVs using the LSTS Toolchain. In Proceedings of the 2018 IEEE OES Autonomous Underwater Vehicle Symposium, Porto, Portugal, 6–9 November 2018. [Google Scholar]
- Best, G.; Cliff, O.M.; Patten, T.; Mettu, R.R.; Fitch, R. Dec-MCTS: Decentralized planning for multi-robot active perception. Int. J. Robot. Res. 2019, 38, 316–337. [Google Scholar] [CrossRef]
- Smith, A.J.; Hollinger, G.A. Distributed inference-based multi-robot exploration. Auton. Robots 2018, 42, 1651–1668. [Google Scholar] [CrossRef]
- Border, R.; Gammell, J.D.; Newman, P. Surface Edge Explorer (SEE): Planning Next Best Views Directly from 3D Observations. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Song, S.; Jo, S. Online inspection path planning for autonomous 3D modeling using a micro-aerial vehicle. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef]
- Hitz, G.; Galceran, E.; Garneau, M.È.; Pomerleau, F.; Siegwart, R. Adaptive continuous-space informative path planning for online environmental monitoring. J. Field Robot. 2017, 34, 1427–1449. [Google Scholar] [CrossRef]
- Butzkey, J.; Dornbushy, A.; Likhachevy, M. 3-D exploration with an air-ground robotic system. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 3241–3248. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.L.; Huang, Y.; Hall, E.L. Region filling operations with random obstacle avoidance for mobile robots. J. Robot. Syst. 1988, 5, 87–102. [Google Scholar] [CrossRef]
Sample Availability: All the software is Open Source and available at the repository of the code https://github.com/margaridaCF/FlyingOctomap_code. |




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 1 m/s | 4 min | ||
| 0.1745 rad/s | local space minimum | 10 × 10 × 10 m | |
| Octree resolution | 0.5 m | Operator-defined region | 70 × 38 × 31 m |
| 2.5 m | Sampling distance | 5 m | |
| Frontiers amount | 35 | Flyby options amount | 6 |
| Flyby length | 4 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faria, M.; Ferreira, A.S.; Pérez-Leon, H.; Maza, I.; Viguria, A. Autonomous 3D Exploration of Large Structures Using an UAV Equipped with a 2D LIDAR. Sensors 2019, 19, 4849. https://doi.org/10.3390/s19224849
Faria M, Ferreira AS, Pérez-Leon H, Maza I, Viguria A. Autonomous 3D Exploration of Large Structures Using an UAV Equipped with a 2D LIDAR. Sensors. 2019; 19(22):4849. https://doi.org/10.3390/s19224849
Chicago/Turabian StyleFaria, Margarida, António Sérgio Ferreira, Héctor Pérez-Leon, Ivan Maza, and Antidio Viguria. 2019. "Autonomous 3D Exploration of Large Structures Using an UAV Equipped with a 2D LIDAR" Sensors 19, no. 22: 4849. https://doi.org/10.3390/s19224849
APA StyleFaria, M., Ferreira, A. S., Pérez-Leon, H., Maza, I., & Viguria, A. (2019). Autonomous 3D Exploration of Large Structures Using an UAV Equipped with a 2D LIDAR. Sensors, 19(22), 4849. https://doi.org/10.3390/s19224849