Abstract
The inevitable frequency errors owing to the frequency mismatch of a transmitter and receiver oscillators could seriously deteriorate the imaging performance in distributed inverse synthetic aperture radar (ISAR) system. In this paper, for this issue, a novel method is proposed to calibrate the linear time-varying frequency errors (LTFE) between the transmitting node and the receiving node. The cost function is constructed based on the entropy minimization principle and the problem of LTFE calibration is transformed into cost function optimization. The frequency error coefficient, which minimizes the image entropy, is obtained by searching optimum solution in the solution space of cost function. Then, the original signal is calibrated by the frequency error coefficient. Finally, the effectiveness of the proposed method is demonstrated by simulation and real-data experiments.
1. Introduction
Inverse synthetic aperture radar (ISAR) is a type of all-weather, all-day, remote sensing radar [1,2] that plays a very important role in target imaging and recognition [3]. Multiple-input Multiple-output (MIMO) radar with widely separated antennas can be considered as a type of multistatic radar [4,5]. It is possible for this system to obtain spatial diversity of the targets’ radar cross section. Therefore, many scholars have studied multistatic ISAR and distributed MIMO-ISAR [6,7,8,9,10,11,12]. Compared with the traditional monostatic ISAR, distributed ISAR can achieve higher resolution and overcome some inherent drawbacks of monostatic ISAR by utilizing both spatial and temporal degrees of freedom. However, the frequency errors caused by frequency mismatch of the transmitter and the receiver oscillators become an important factor that restricts the application of distributed ISAR.
At present, the research studies on distributed ISAR are generally based on ideal conditions where the frequency errors between transmitter and receiver are not considered. The phase asynchronism caused by frequency errors in distributed radar system seriously degrades the performance of location [13], detection [14], and imaging. Literature, in the field of radar imaging, has studied the effect of frequency errors on multistatic SAR and MIMO radar imaging [15,16]. The first-order phase errors caused by the constant frequency errors only cause the image to shift in the cross-range direction without damaging the image quality. However, the quadratic phase errors caused by the linear time-varying frequency errors (LTFE) result in image defocus. Therefore, the calibration of the LTFE is mainly researched in this paper. In bistatic or multistatic SAR, phase synchronization is often achieved by designing special phase synchronization links to calibrate frequency errors, such as the direct-path echo method [17] and the pulse alternation method [18]. However, additional equipment is required to implement the frequency error calibration by these methods, which increases the complexity of the radar system. Few papers can be found in previous literature, in the field of frequency error calibration of distributed ISAR imaging.
In this paper, a method based on the entropy minimization principle is proposed to calibrate the LTFE. The image entropy is an important measure of image focusing performance. When the image entropy is smaller, the image focusing performance is better [19]. First, on the basis of the entropy minimization principle, the frequency error coefficient can be estimated by searching optimum solution in the solution space of cost function. Then, the original signal is calibrated by the estimated value of the frequency error coefficient. In the proposed method only radar echo is required and the additional hardware for the radar system is not required.
The remainder of this paper is organized as follows: The signal model of distributed ISAR and the imaging geometry are presented in Section 2. The basic idea of the proposed LTFE calibration method is explained in Section 3. The effectiveness of the proposed method will be demonstrated by simulation and real-data experiments in Section 4. Finally, our conclusions for this paper are summarized in Section 5.
2. Distributed ISAR System and Signal Model
The geometry of the distributed ISAR system and the signal model are introduced in this section. For simplicity and generality, two radars are used to construct the distributed ISAR systems. This model can be extended to the case of multiple radars.
2.1. The Geometry of Distributed ISAR System
The geometry of distributed ISAR system is shown in Figure 1. Radar 1 can transmit signals and receive signals, whereas radar 2 only receives signals. The and represent the reference center and generic scatterer on the target, respectively. The whole target is made up of K scatterers. The distance between the kth scatterer and the reference center is , the initial angle between the kth scatterer and the axis is . The initial distance between radar 1, radar 2, and the reference center is and , respectively. denotes the angle between the line of sight (LOS) of the nth radar and axis. It is equivalent to a monostatic radar in that radar 1 acts as transmitter and radar 2 as receiver. It is assumed that the moving target has been transformed into a turntable model after motion compensation and the target rotates around the reference center with constant angular speed of for both radars.
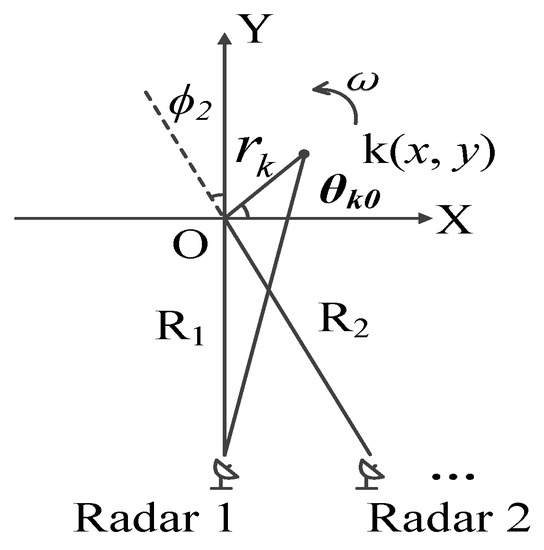
Figure 1.
Geometry of distributed inverse synthetic aperture radar (ISAR).
2.2. Distributed ISAR Signal Model with LTFE
According to the geometry of distributed ISAR, the sum of the distance from the ith radar and the jth radar to the kth scatterer can be expressed as:
where denotes the distance between the ith radar and the reference center .
The ith radar transmitter and the jth radar receiver can be equivalent to a monostatic radar, namely, the nth radar. So we can let , , . Then, the signal received by the nth radar (n = 0, …, N − 1) from the kth scatterer at time t is written as:
where [5]. is the total ISAR observation time for imaging. The rotation angle of target observed by the nth equivalent radar can be expressed as:
where represents the rotation angle of the kth scatterer at observed by the nth equivalent radar and is the rotation angle of the kth scatterer at observed by the nth equivalent radar. When the rotation angle is small, Equation (4) can be approximately expressed as:
where and are range and cross-range position on the imaging projection plane of the nth equivalent radar, respectively. In Equations (4) and (6), it is assumed that the local oscillators of both receiver and transmitter are perfect without frequency errors. In the actual distributed ISAR system, the carrier frequencies of transmitter and receiver are not always equal when the ith radar transmits and the jth radar receives, so the phase errors will occur after mixing. Assuming that the actual carrier frequency of the ith radar transmitter is and that of the jth radar receiver is , the received signal of the nth equivalent radar after mixing can be rewritten as:
The signal model with frequency errors is expressed in Equation (7). In this paper, we focus on the LTFE which can be defined as follow:
where and are stability of the ith transmitter oscillator and the jth receiver oscillator, respectively. In Equation (8), equals and equals . is the ideal carrier frequency of transmitter and receiver. After substituting Equation (8) into the second exponential term of Equation (7), we can get the following result:
The quadratic phase term in Equation (9) is produced by the LTFE which is the main reason for the image defocusing. Therefore, the focus of this paper is to eliminate the influence of quadratic phase terms on distributed ISAR imaging by LTFE calibration. After substituting Equation (9) into Equation (7), the echo signal model with LTFE can be re-expressed as:
According to Equation (6), it is known that there is a Fourier transform relationship between the cross-range coordinate and time . The cross-range focusing can be achieved by Fourier transform. The target rotation angles of each radar during are . These rotation angles are not completely overlapping as different radars have different observation angles. Therefore, a larger aperture can be synthesized by rearranging and adding echo data of different radars. According to the fusion scheme in literature [5], the fusion signal can be expressed as:
where , and , with and . After processing the echo signal of each radar according to Equation (11), the global fused signal can be re-expressed as Equation (12):
, and are assumed to be equal constants in Equation (12). In order to avoid gaps in the overall view angle, it is required that in Equations (11) and (12). According to Equation (12), it can be observed that the fusion result of multiple radar signals is equivalent to increasing the observation time of single radar. When there are LTFE, the fusion result of multiple radar signals is:
Comparing Equation (13) with Equation (11), the signal fusion in the presence of LTFE is equivalent to adding a quadratic phase term to the echo of each radar before signal fusion. If the quadratic phase term of the nth equivalent radar echo is not removed before signal fusion, it will still exist in the fusion signal, which will degrade the performance of fuse signal imaging. Therefore, the frequency errors of each equivalent radar echo signal should be calibrated before signal fusion.
3. Calibration Method of LTFE
In this section, the LTFE will be calibrated based on the entropy minimization principle. Here, shown in Equation (14) is the frequency error calibration term:
where is the frequency error coefficient. The expression of signal with LTFE in Equation (10) multiplied by Equation (14) is:
According to Equation (15), it is obvious that the LTFE is completely calibrated when , namely, quadratic phase coefficient is zero. Therefore, the key to this problem is to find an accurate to calibrate the original signal before signal fusion and imaging.
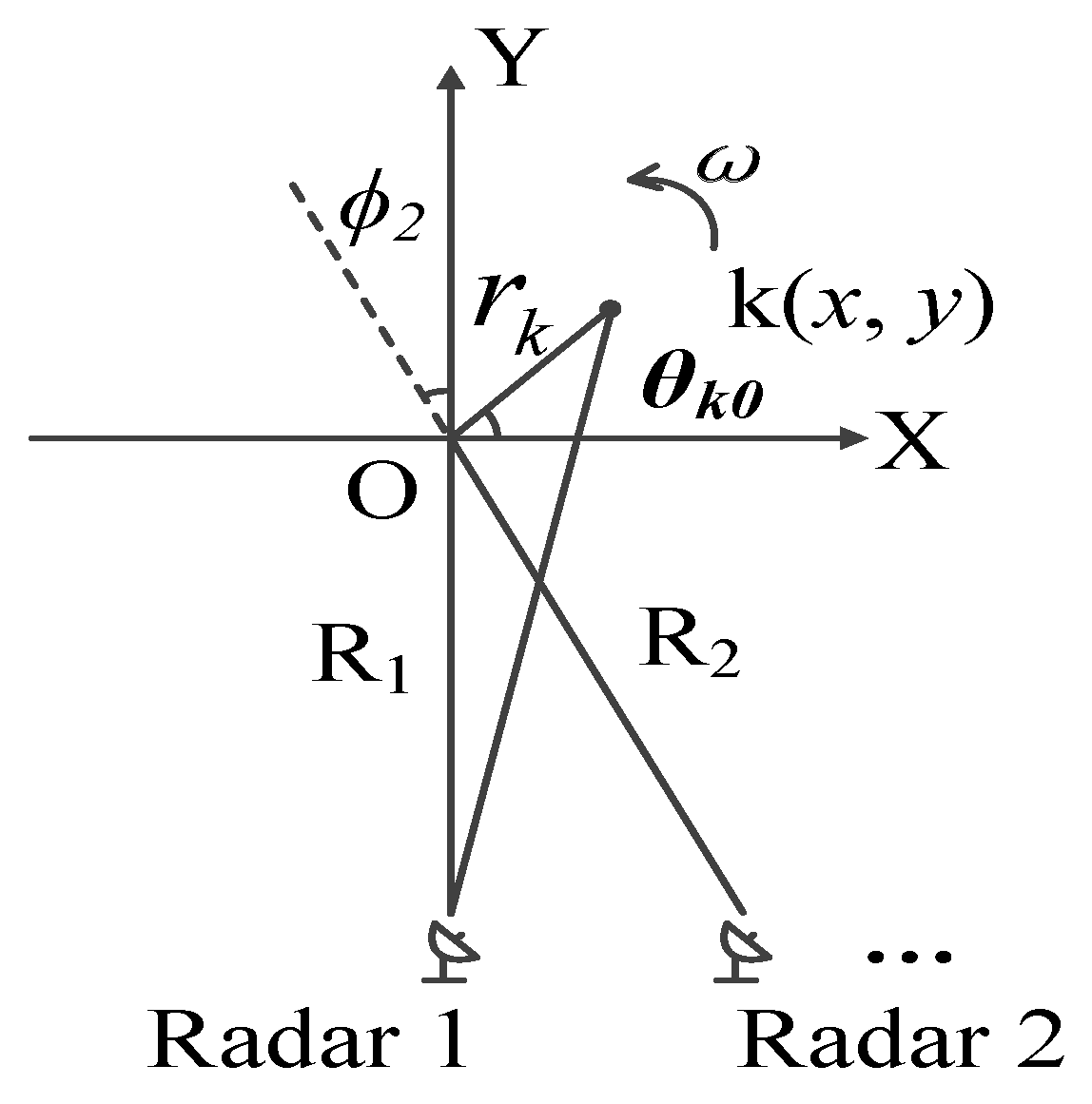
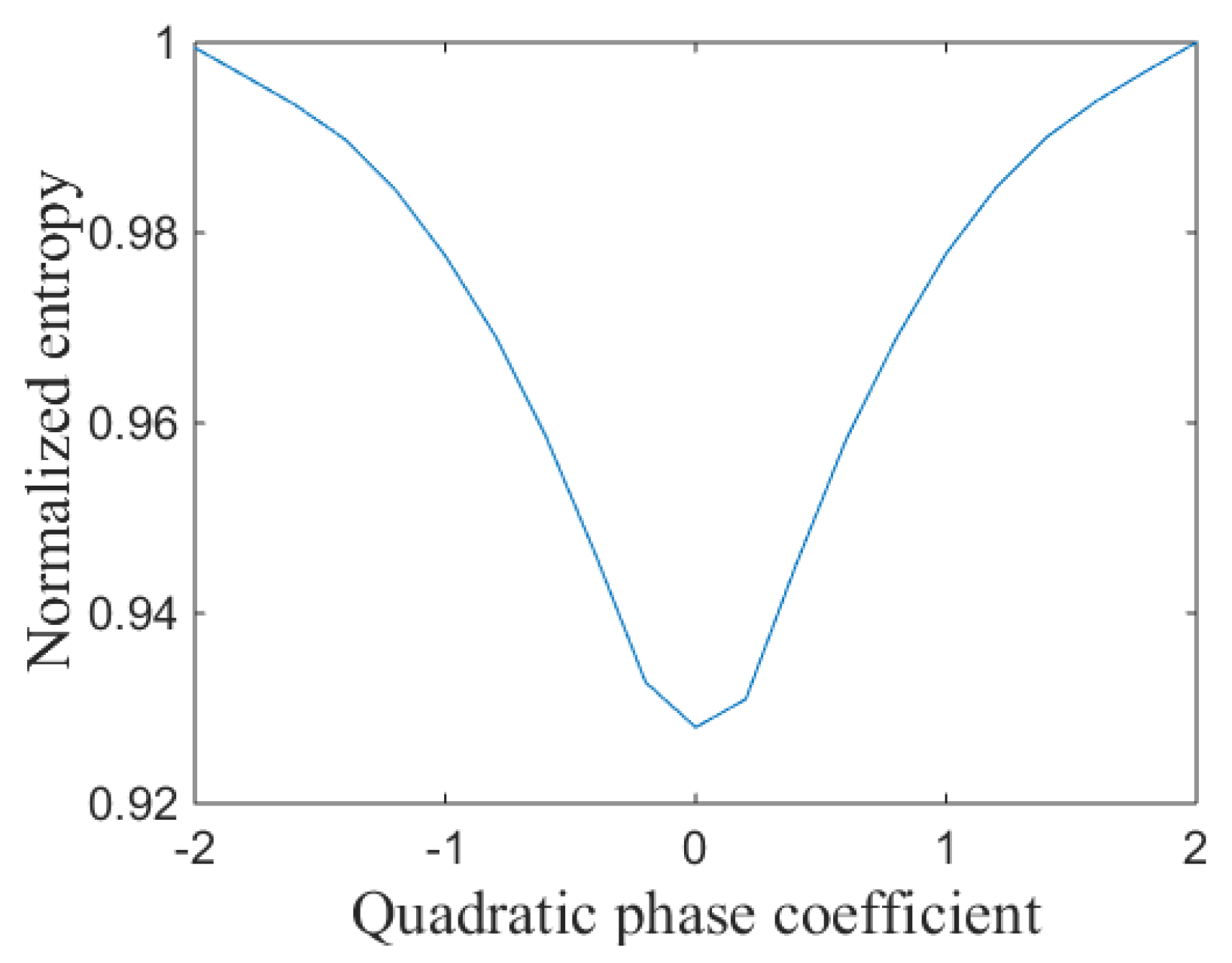
The quadratic phase errors produced by the LTFE can defocus the image, so the image entropy will increase. The image focusing performance is the best when the quadratic phase coefficient is zero. In such a case, the image entropy also reaches minimum. The relationship between image entropy and quadratic phase coefficient is shown in Figure 2.
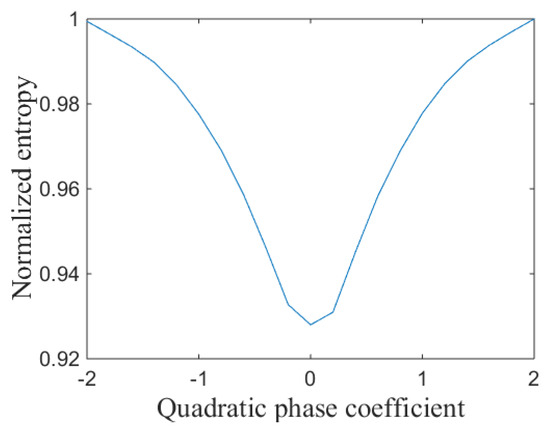
Figure 2.
Relationship between normalized entropy and quadratic phase coefficient.
Figure 2 shows that the image entropy reaches minimum when the LTFE is calibrated by .
Therefore, the entropy minimization principle can be employed to estimate . For estimating , the image shown in Equation (16) needs to be obtained by Fourier transform:
where FT (·) represents Fourier transform operation. Then, the entropy function is expressed as:
where . is the gray value of the point on the image . Image size is . The LTFE calibration method proposed in this paper is to estimate the the frequency error coefficient by minimizing the image entropy. Then the estimated value of the frequency error coefficient is used to calibrate the LTFE of the original signal. Therefore, the entropy function can be used as the cost function. The problem of LTFE calibration can be treated as the problem of cost function optimization. The cost function is expressed as:
The frequency error coefficient can be obtained by searching the optimum solution in the solution space of the cost function in Equation (18). After calibrating the LTFE with the estimated value , the signals are fused for further imaging. The imaging result will have a good focus performance.
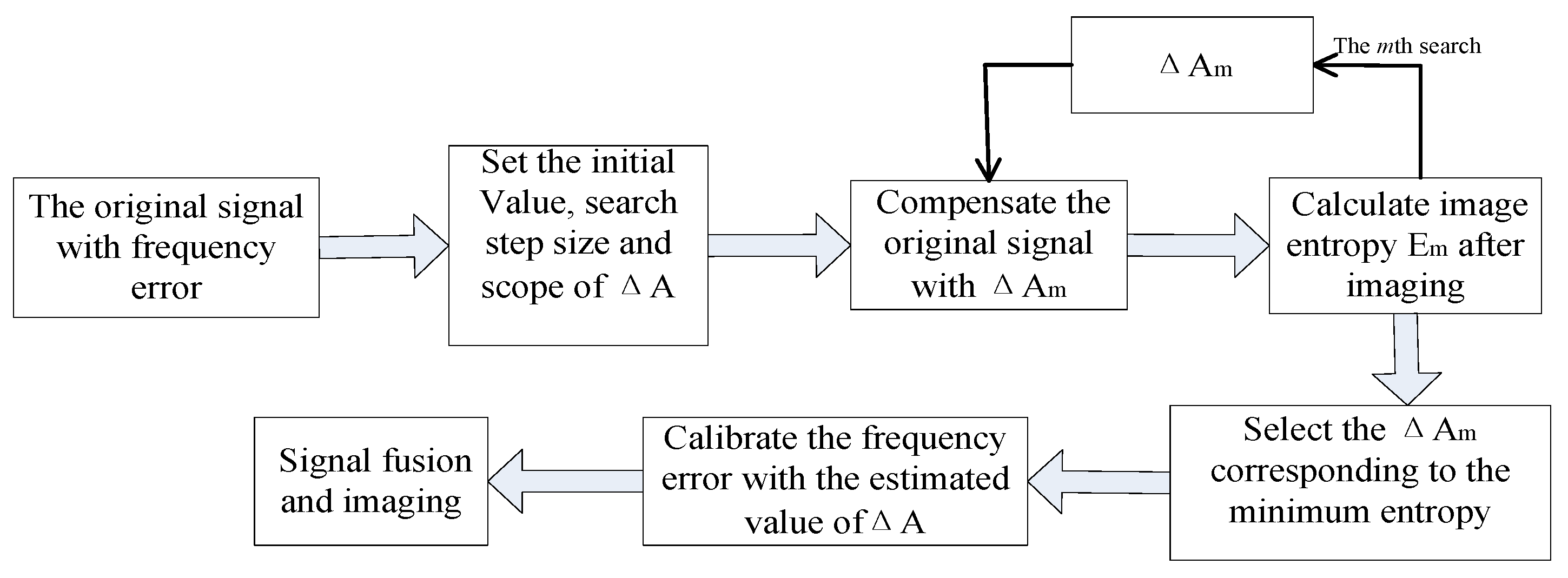
The main steps of the proposed method are summarized as follows:
- Step 1
- set the initial value, search scope and search step size of .
- Step 2
- according to Equation (14) and (15), in every search step is used to compensate the original signal ( is the mth possible estimate value of ).
- Step 3
- image with compensated signal and calculate image entropy .
- Step 4
- complete the search in the whole search range of , compare the image entropy of all the imaging results, and select the corresponding to the minimum entropy as the estimated value of .
- Step 5
- calibrate the signal of the nth radar with the estimated value of obtained in step 4.
- Step 6
- calibrate the echo signal of every equivalent radar, and fuse the signals for imaging finally according to the method of step 1–5.
The flow chart which illustrates the procedure of the proposed method is shown in Figure 3.
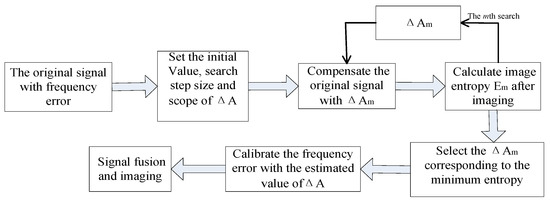
Figure 3.
Flow chart of calibration method for frequency error based on entropy minimization principle.
4. Numerical Simulation and Analysis
In this section, the effectiveness of the proposed method is demonstrated by simulation and real-data experiments. In the simulation, the simplest distributed ISAR system is used as shown in Figure 1. Radar 1 is a self-transmitting and self-receiving radar which has no frequency errors. Radar 2 receives signals transmitted by radar 1, therefore in this case, the LTFE caused by the frequency mismatch between the transmitter and the receiver oscillators must be calibrated. Then, the received signals of radar 1 and radar 2 are fused.
4.1. Simulation 1: The Effectiveness of the Proposed Method
Simulation parameters are given in Table 1.

Table 1.
Simulation parameters.
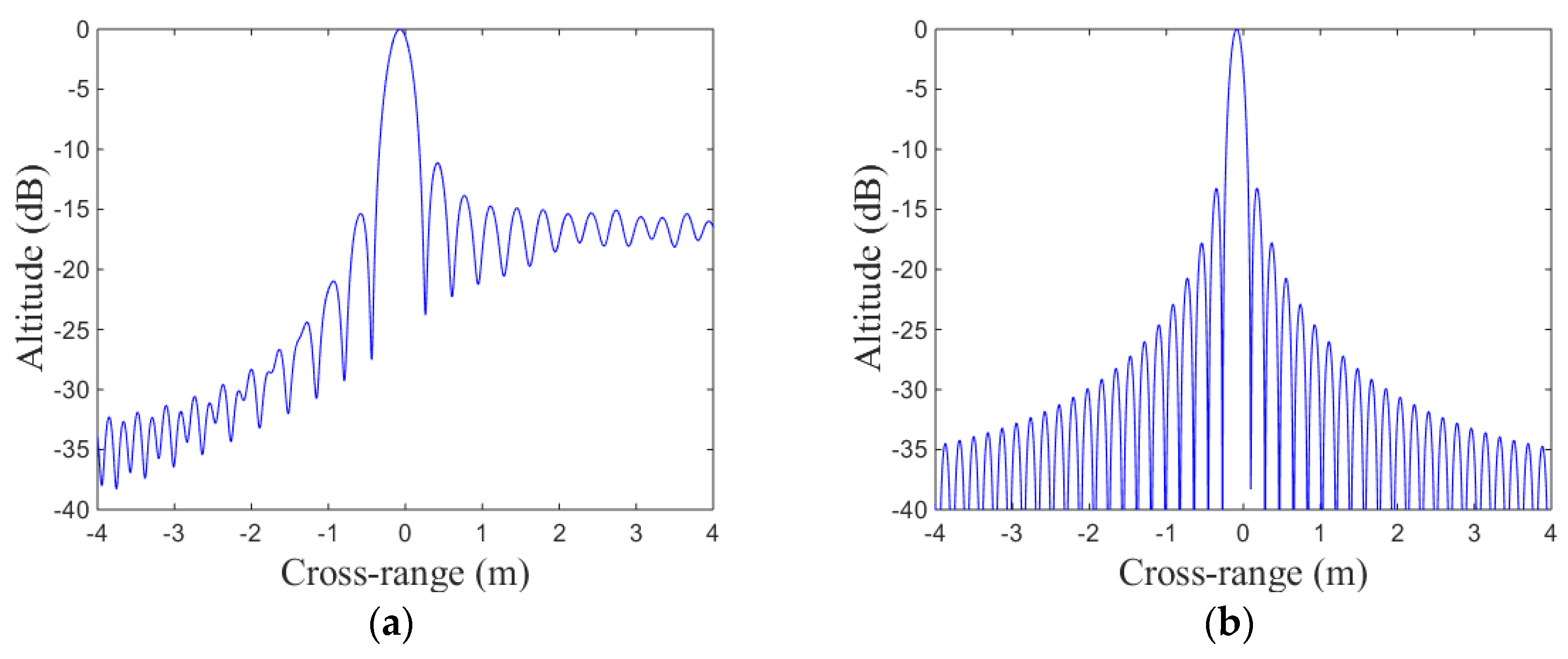
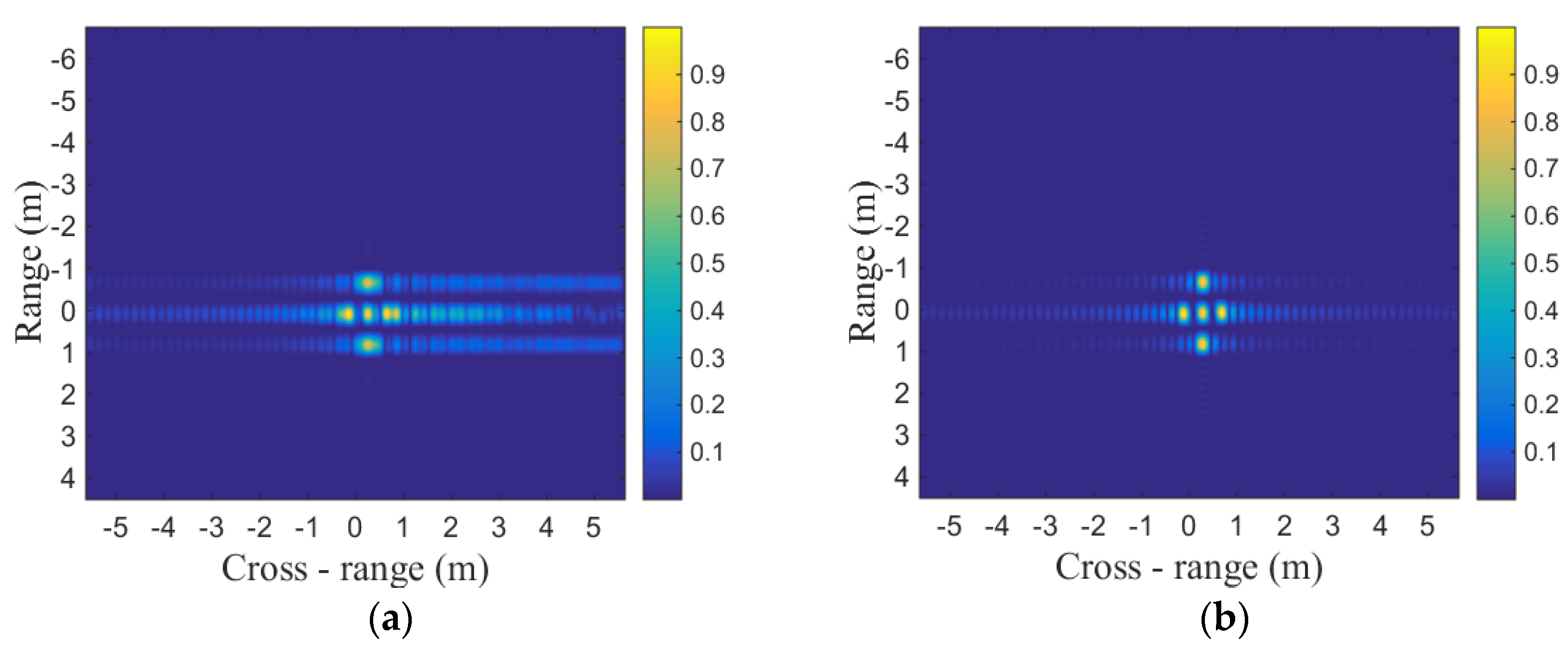
The target model used in the simulation is shown in Figure 4. In Figure 5, cross-range point spread function (PSF) with LTFE is compared with the calibrated one. It is demonstrated that the LTFE seriously deteriorate the spectrum of cross-range and the LTFE can be calibrated effectively by the proposed method. The performance of cross-range PSF is improved when the LTFE is calibrated by the proposed method. According to the two-dimensional imaging results shown in Figure 6, it can be seen that the focusing performance of Figure 6b is much better than that of Figure 6a.
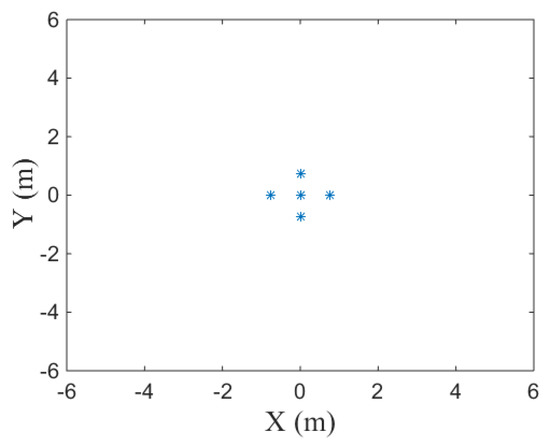
Figure 4.
Target model.
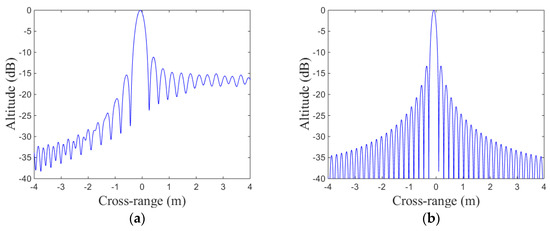
Figure 5.
Cross-range point spread function (PSF): (a) cross-range PSF with LTFE; (b) cross-range PSF after calibrating LTFE.
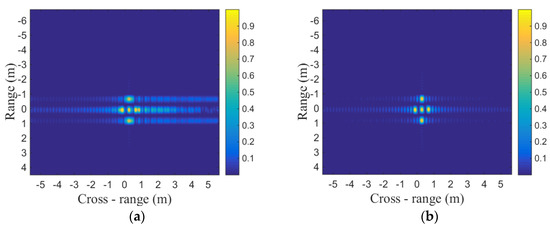
Figure 6.
Two-dimensional imaging results: (a) imaging results of fused signal with LTFE; (b) imaging results of fused signal after calibrating frequency error.
Image entropy and image contrast [20] are two objective metrics used to evaluate image quality. In order to quantitatively prove the effectiveness of the proposed method from a mathematical point of view, we employ image entropy and image contrast to further explain the simulation results. The image entropy is defined in Equation (17). The image contrast is defined as follows:
where is the amplitude of each pixel and represents the mean operation. According to Equations (17) and (19), the image entropy and image contrast shown in Figure 5 are listed in Table 2 and Table 3, respectively.
Table 2.
Image entropy of Figure 5.
Table 3.
Image contrast of Figure 5.
Table 2 shows that the image entropy shown in Figure 5b is smaller than that shown in Figure 5a, in other words, the focusing performance shown in Figure 5b is better than that shown in Figure 5a.
The bigger the image contrast is, the better the image focusing performance is. Table 3 shows that the image entropy shown in Figure 5b is bigger than that shown in Figure 5a, which means that shown in Figure 5b has better focusing performance than that shown in Figure 5a. Both image entropy and image contrast prove that the focusing performance shown in Figure 5b is better than that shown in Figure 5a, namely, the LTFE can be calibrated effectively by the proposed method.
Similar to Figure 5, the image entropy and image contrast shown in Figure 6 are listed in Table 4 and Table 5, respectively.
Table 4.
Image entropy of Figure 6.
Table 5.
Image contrast of Figure 6.
As listed in Table 4 and Table 5, the image entropy shown in Figure 6b is smaller than that shown in Figure 6a, and the image contrast shown in Figure 6b is larger than that shown in Figure 6a. In other words, the focusing performance shown in Figure 6b is better. These simulation results demonstrate the effectiveness of the proposed method.
4.2. Simulation 2: Demonstration by Real-Data
The target model used in the simulation 1 is a scatterer model, which is not completely consistent with the true situation. Accordingly, Yake-42 real-data [21,22] is utilized to further demonstrate the effectiveness of the proposed method. The Yake-42 aircraft is 36.8 m in length and 34.88 m in width. It flies smoothly along a straight line at an altitude of 4 km from the ground. A ground-based imaging radar is used to acquire the echo data of the Yake-42 aircraft. Some important radar parameters of the Yake-42 real-data are listed in Table 6.
Table 6.
Radar parameters of Yake-42 real-data.
The Yake-42 real-data is a single-sensor data, so it cannot be directly used in distributed ISAR fusion imaging. We need to emulate the two sensors’ distributed ISAR acquisition with the Yake-42 real-data. To accomplish this, the Yake-42 real-data of 256 continuous pulses is divided into two parts. The data of one to 128 pulses is used as radar 1 echo data and the data of 129 to 256 pulses is used as radar 2 echo data. The Yake-42 data of 256 continuous pulses is equivalent to the echo data received simultaneously by two sensors during 1.28 s. In the true distributed ISAR system, echo data of radar 2 has frequency errors. However, Yake-42 data is received by a self-transmitting and self-receiving radar with no frequency errors. Therefore, it is necessary to add a LTFE term to the equivalent echo data of radar 2 and set the frequency error coefficient as 5 Hz/s2. The echo data of two sensors’ distributed ISAR system will be emulated based on the aforementioned processing. Then, the distributed ISAR real-data can be used to demonstrate the effectiveness of the proposed method.
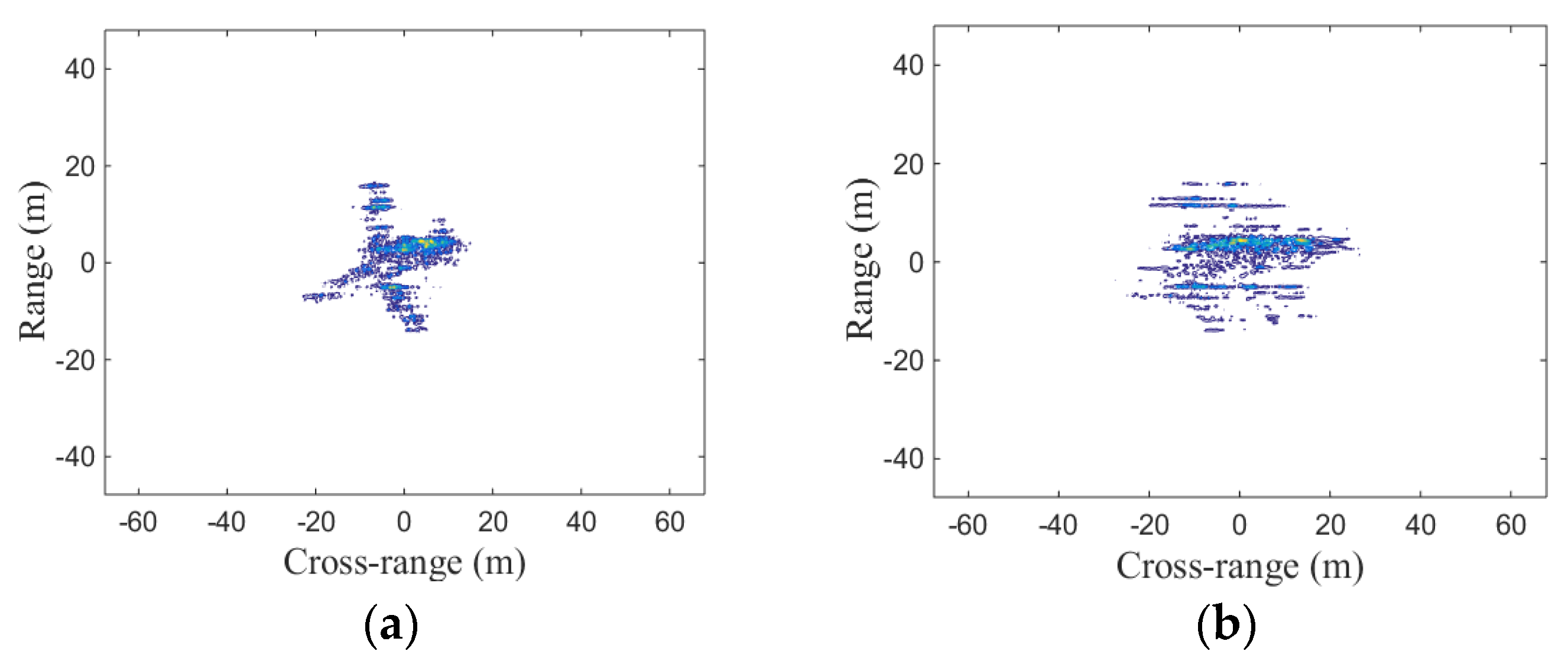
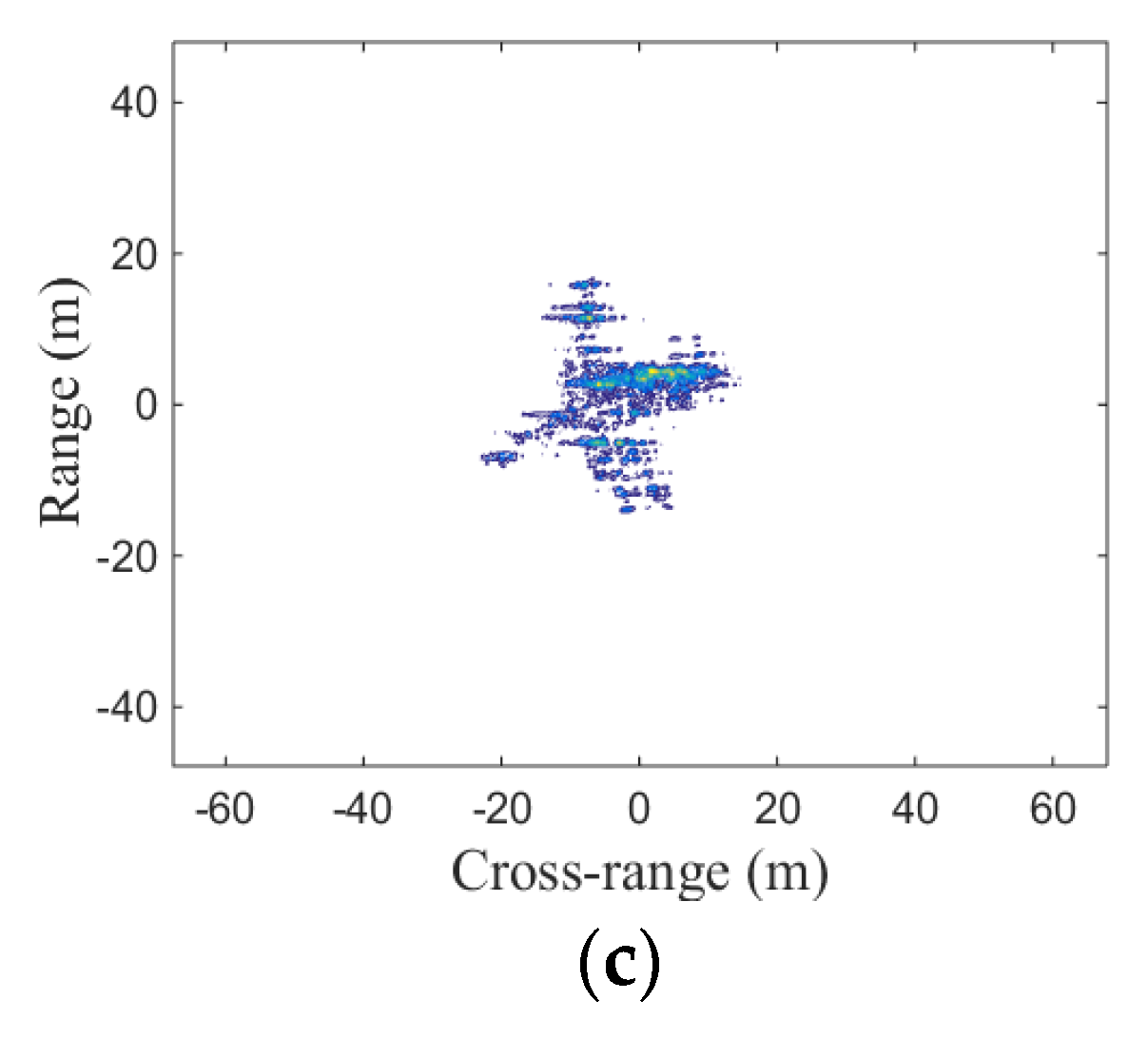
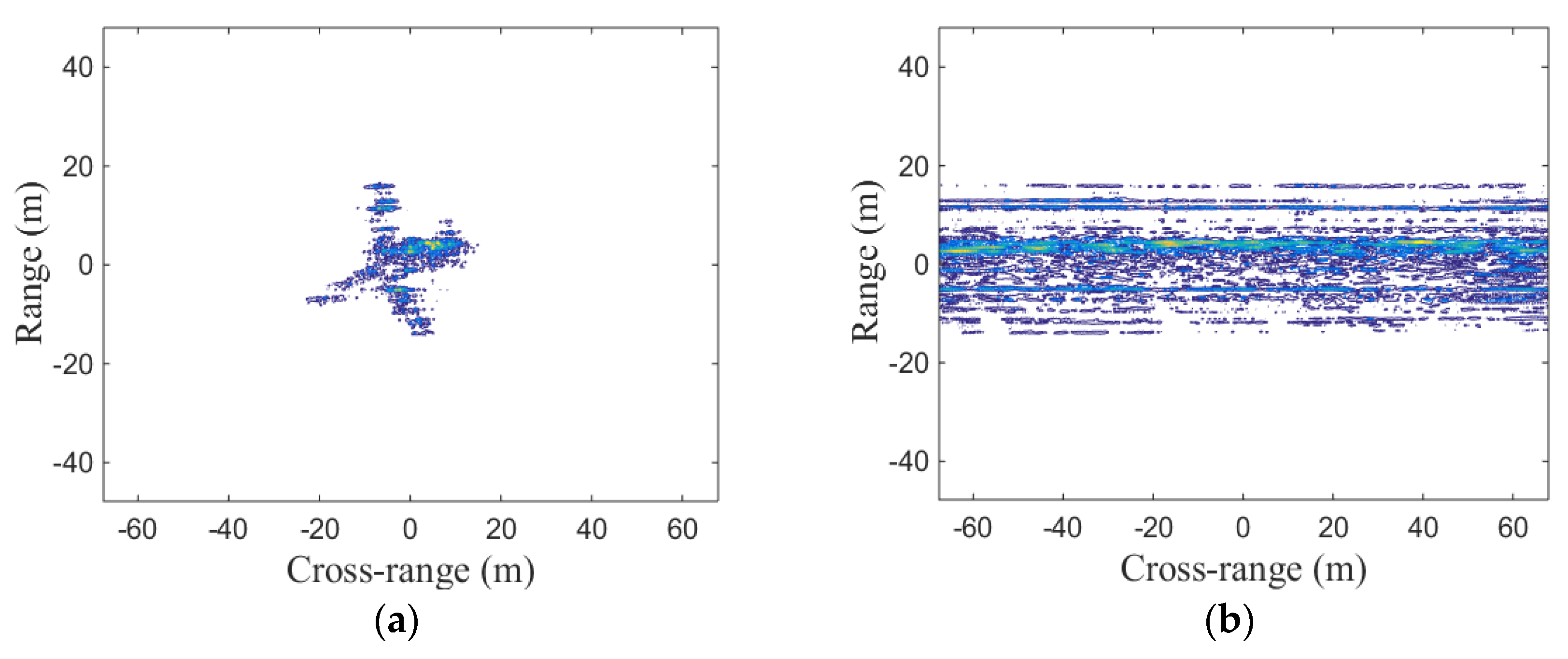
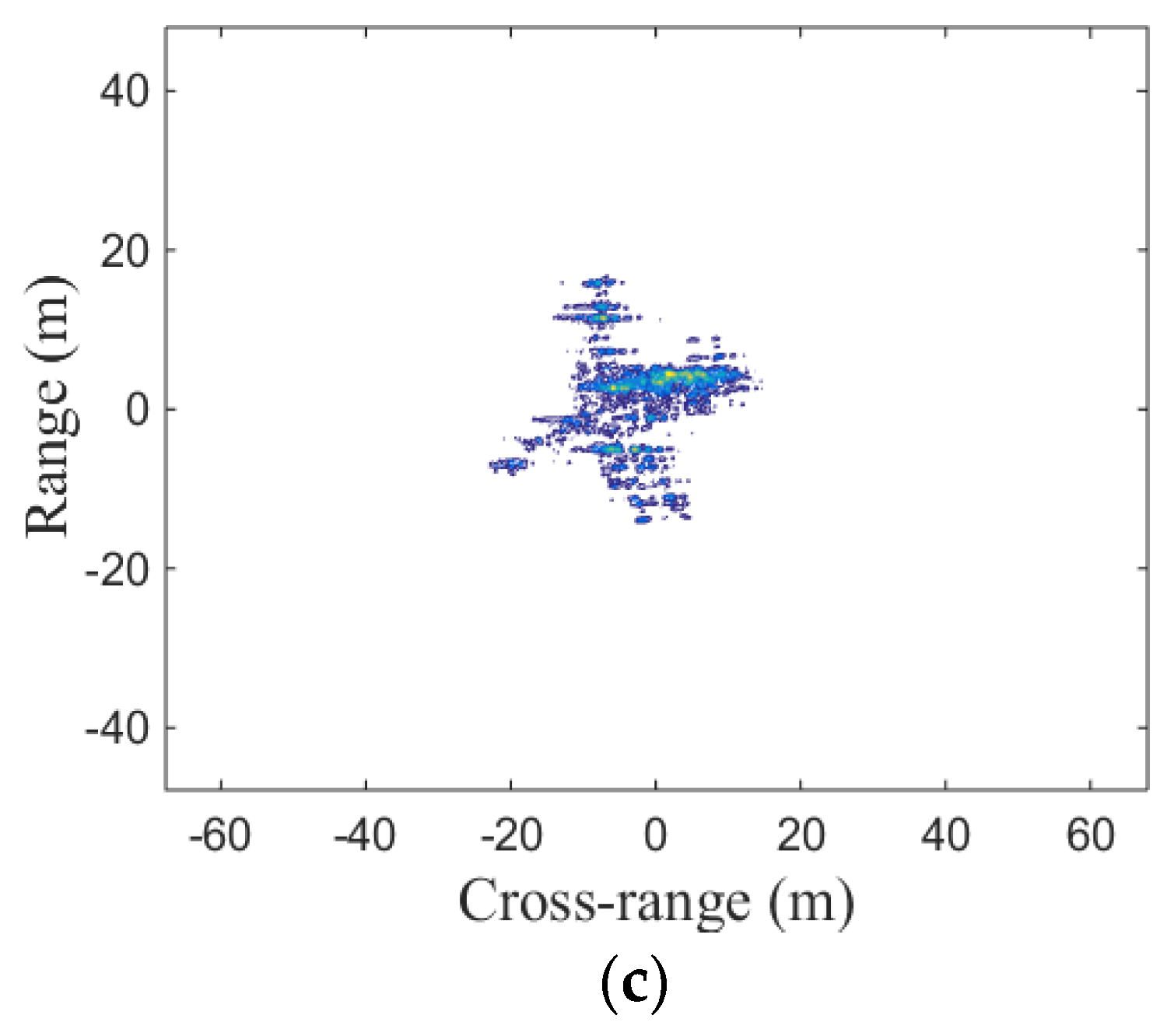
Figure 7a shows the imaging result of distributed ISAR real-data without LTFE. It is obvious that the image has a good focusing performance. In practice, frequency errors inevitably exist in the distributed ISAR system because of the frequency mismatch between the transmitter and the receiver oscillators. Figure 7b shows the imaging result of distributed ISAR real-data with LTFE. It can be seen that the LTFE cause the image defocus and the imaging performance is seriously deteriorated. The imaging result of distributed ISAR real-data after calibrating the LTFE by the proposed method is shown in Figure 7c. The focusing performance shown in Figure 7c is better than that shown in Figure 7b, which demonstrates that the proposed method can effectively calibrate the LTFE and improve the imaging performance. It can be seen from the comparison of the imaging results of Figure 7a with Figure 7c, the proposed method is effective for the real-data. For further verification, the image entropy and image contrast are listed in Table 7 and Table 8, respectively.
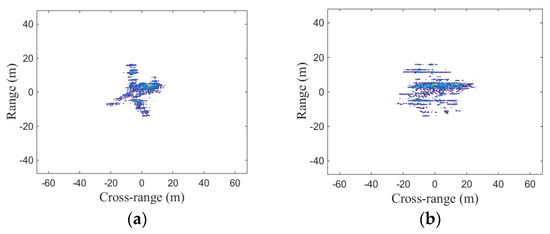
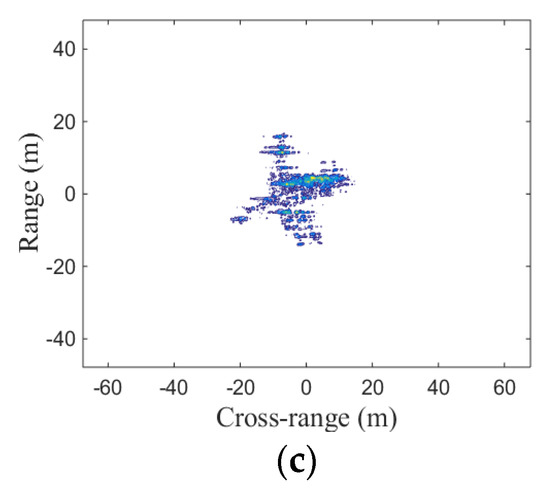
Figure 7.
Coherent fusion imaging results of real-data: (a) imaging result of real-data without LTFE; (b) imaging result of real-data with LTFE; (c) imaging result of real-data after calibrating LTFE.
Table 7.
Image entropy of Figure 7.
Table 8.
Image contrast of Figure 7.
The data in Table 7 and Table 8, show that the image entropy shown in Figure 7c is smaller than that shown in Figure 7b, while the image contrast shown in Figure 7c is bigger than that shown in Figure 7b. These two metrics demonstrate that the focusing performance shown in Figure 7c is better than that shown in Figure 7b and the proposed method in this paper can effectively calibrate the LTFE.
In order to prove that the proposed method can effectively calibrate the LTFE in different sizes, another experiment under the condition of large LTFE is shown in Figure 8. In this experiment, the frequency error coefficient is set as 15 Hz/s2.
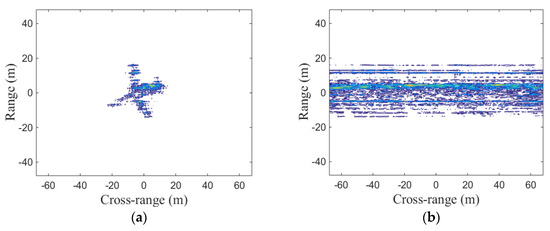
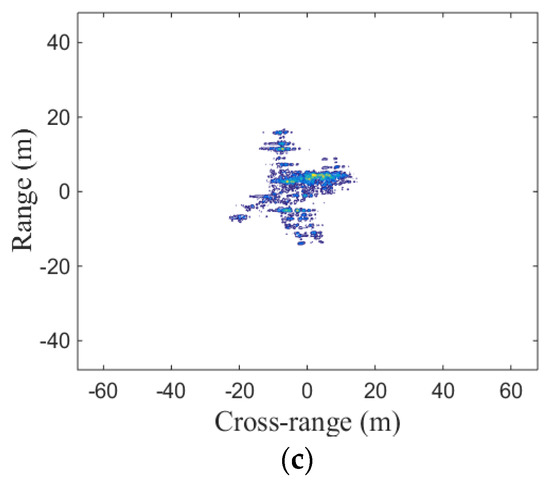
Figure 8.
Coherent fusion imaging results under large LTFE: (a) imaging result without large LTFE; (b) imaging result with large LTFE; (c) imaging result after calibrating large LTFE.
Figure 8b shows that the image is completely out of focus when there is a large LTFE. As shown in Figure 8c, a well-focused image is obtained after calibrating the large LTFE by the method proposed in this paper. The image entropy and image contrast of Figure 8 are listed in Table 9 and Table 10, respectively.
Table 9.
Image entropy of Figure 8.
Table 10.
Image contrast of Figure 8.
The image entropy listed in Table 9 and the image contrast listed in Table 10 also prove that the focusing performance shown in Figure 8c is better than the focusing performance shown in Figure 8b, namely, the proposed method in this paper can still effectively calibrate LTFE and improve image performance under the condition of large LTFE.
5. Conclusions
Frequency errors in distributed ISAR systems degrade the image performance. For this issue in this paper, an error calibration method based on entropy minimization principle is proposed that can calibrate the LTFE of distributed ISAR system and realize phase synchronization. The distributed ISAR fusion imaging performance is improved significantly after calibrating the LTFE by the proposed method. Only radar echo is required in the proposed method so the additional hardware for the radar system is not required. The numerical simulation results show that the LTFE in the distributed ISAR can be calibrated effectively by the proposed method.
Author Contributions
All authors contributed a great deal of effort to this paper. H.K. provided the main idea, designed the algorithm, performed the experiments and wrote the paper. J.L., H.Z., Z.B. and Z.Y. supervised the analysis, edited the manuscript and provided many valuable suggestions to this study.
Funding
This work was supported by the National Natural Science Foundation of China under contract No. 61431016.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Walker, J.L. Range-Doppler Imaging of Rotating Objects. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 23–52. [Google Scholar] [CrossRef]
- Wang, B.; Xu, S.; Wu, W.; Hu, P.; Chen, Z. Adaptive ISAR Imaging of Maneuvering Targets Based on a Modified Fourier Transform. Sensors 2018, 18, 1370. [Google Scholar] [CrossRef] [PubMed]
- Vespe, M.; Baker, C.J.; Griffiths, H.D. Automatic target recognition using multi-diversity radar. IET Radar Sonar Navig. 2007, 1, 470–478. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO Radar with Widely Separated Antennas. IEEE Signal Process. Mag. 2007, 25, 116–129. [Google Scholar] [CrossRef]
- Griffiths, H. Workshop on multistatic and MIMO radar. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 43–45. [Google Scholar] [CrossRef]
- Pastina, D.; Bucciarelli, M.; Lombardo, P. Multistatic and MIMO Distributed ISAR for Enhanced Cross-Range Resolution of Rotating Targets. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3300–3317. [Google Scholar] [CrossRef]
- Brisken, S. Multistatic ISAR—Chances and challenges. In Proceedings of the International Radar Conference, Lille, France, 13–17 October 2014; IEEE: Washington, DC, USA, May 2015; pp. 1–6. [Google Scholar]
- Pastina, D.; Santi, F.; Bucciarelli, M. MIMO Distributed Imaging of Rotating Targets for Improved 2-D Resolution. IEEE Geosci. Remote Sens. Lett. 2015, 7, 190–194. [Google Scholar] [CrossRef]
- Li, Y.; Fu, Y.; Zhang, W. Distributed ISAR Sub-image Fusion of Nonuniform Rotating Target Based on Matching Fourier Transform. Sensors 2018, 18, 1806. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Cheney, M.; Borden, B. Multistatic Radar Imaging of Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 2010, 48, 230–242. [Google Scholar] [CrossRef]
- He, X.; Tong, N.; Hu, X. High-Resolution Imaging and 3-D Reconstruction of Precession Targets by Exploiting Sparse Apertures. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1212–1220. [Google Scholar] [CrossRef]
- Sego, D.J. Three Dimensional Bistatic Tomography Using HDTV. Ph.D. Thesis, University College London, London, UK, 2016. [Google Scholar]
- Yang, Y.; Blum, R.S. Phase Synchronization for Coherent MIMO Radar: Algorithms and Their Analysis. IEEE Trans. Signal Process. 2011, 59, 5538–5557. [Google Scholar] [CrossRef]
- Akcakaya, M.; Nehorai, A. MIMO Radar Detection and Adaptive Design under a Phase Synchronization Mismatch. IEEE Trans. Signal Process. 2010, 58, 4994–5005. [Google Scholar] [CrossRef]
- Krieger, G.; Younis, M. Impact of oscillator noise in bistatic and multistatic SAR. IEEE Geosci. Remote Sens. Lett. 2006, 3, 424–428. [Google Scholar] [CrossRef]
- Li, D.; Liu, C.; Wang, T. Sparse self-calibration via iterative minimization against phase synchronization mismatch for MIMO radar imaging. In Proceedings of the IEEE Radar Conference, Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–4. [Google Scholar]
- Wang, W. Approach of Adaptive Synchronization for Bistatic SAR Real-Time Imaging. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2695–2700. [Google Scholar] [CrossRef]
- Younis, M.; Metzig, R.; Krieger, G. Performance prediction of a phase synchronization link for bistatic SAR. IEEE Geosci. Remote Sens. Lett. 2006, 3, 429–433. [Google Scholar] [CrossRef]
- Cao, P.; Xing, M.; Sun, G.; Li, Y.; Bao, Z. Minimum Entropy via Subspace for ISAR Autofocus. IEEE Geosci. Remote Sens. Lett. 2010, 7, 205–209. [Google Scholar] [CrossRef]
- Berizzi, F.; Corsini, G. Autofocusing of inverse synthetic aperture radar images using contrast optimization. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1185–1191. [Google Scholar] [CrossRef]
- University of Electronic Science and Technology of China (UESTC) Information System dataset. Available online: http://www.junfang-uestc.net/codes/ISAR.rar (accessed on 19 May 2018).
- Zhao, G.; Wang, Z.; Wang, Q.; Shi, G.; Shen, F. Robust ISAR imaging based on compressive sensing from noisy measurements. Signal Process. 2012, 92, 120–129. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).