Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data




Abstract
:
1. Introduction
2. Related Works
3. Materials and Methods
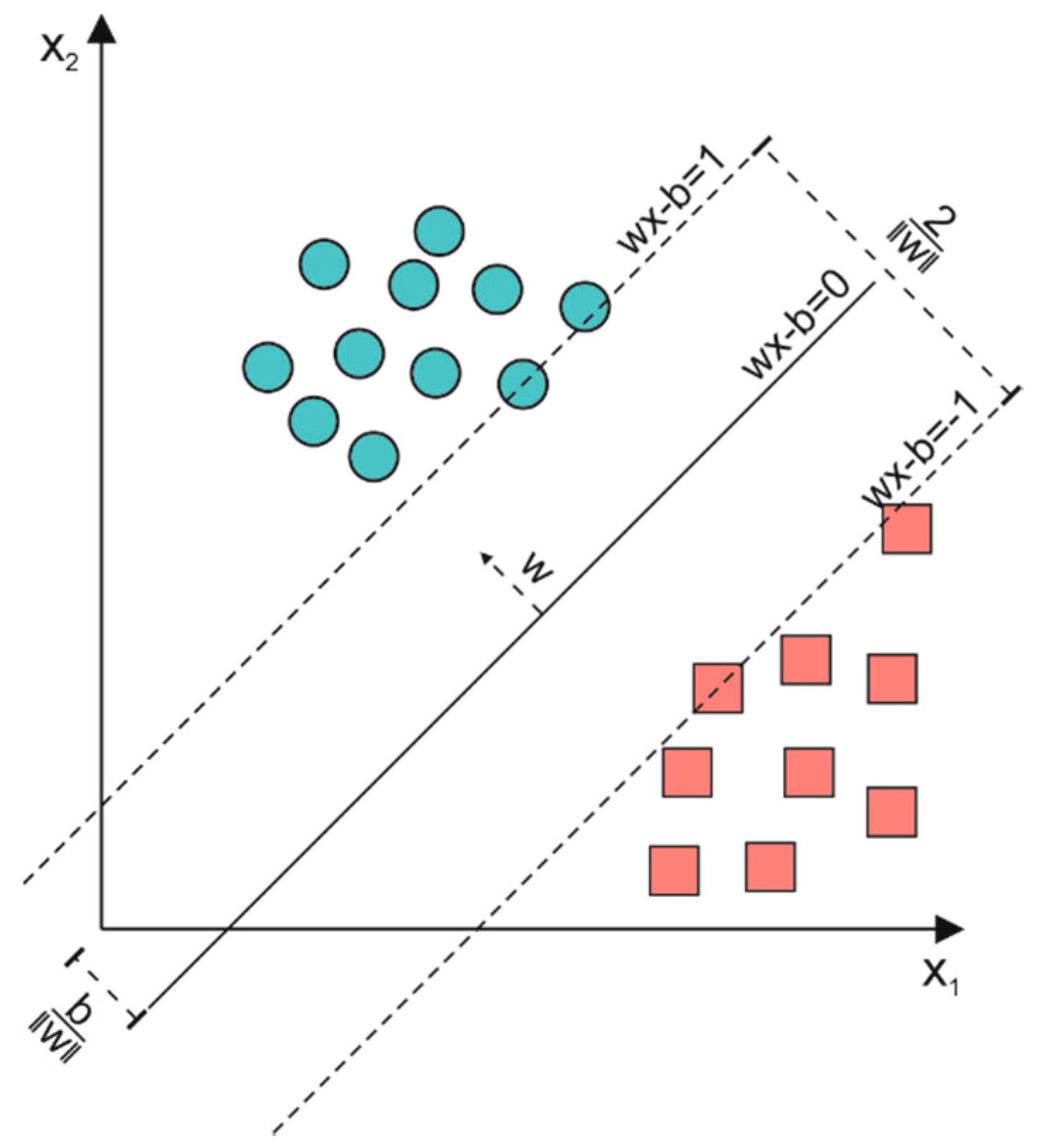
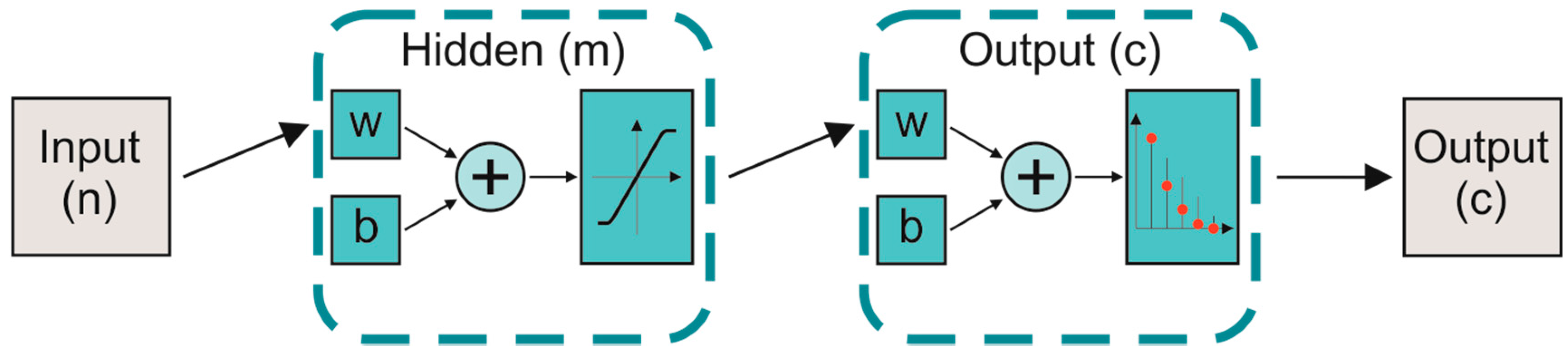
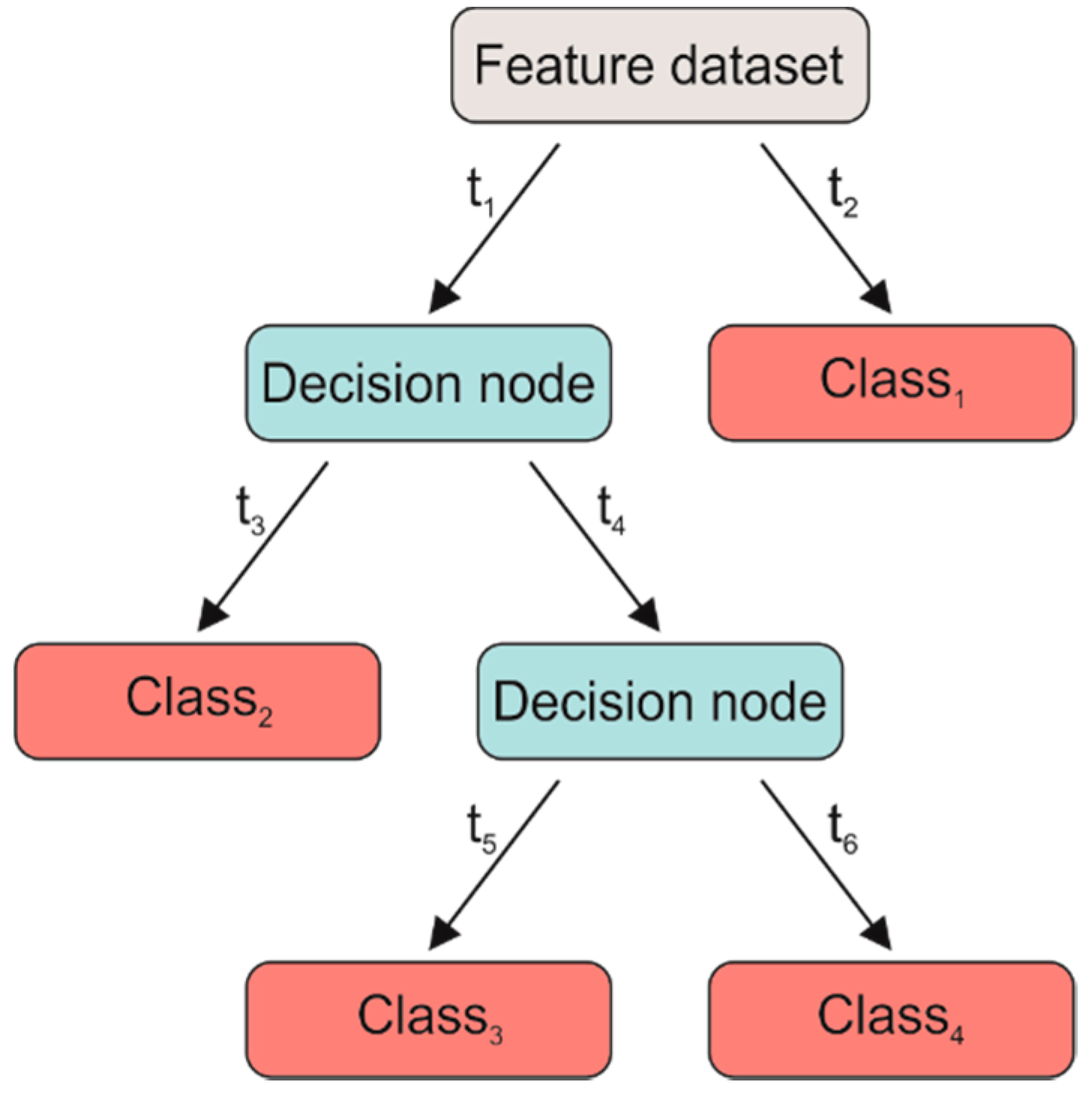
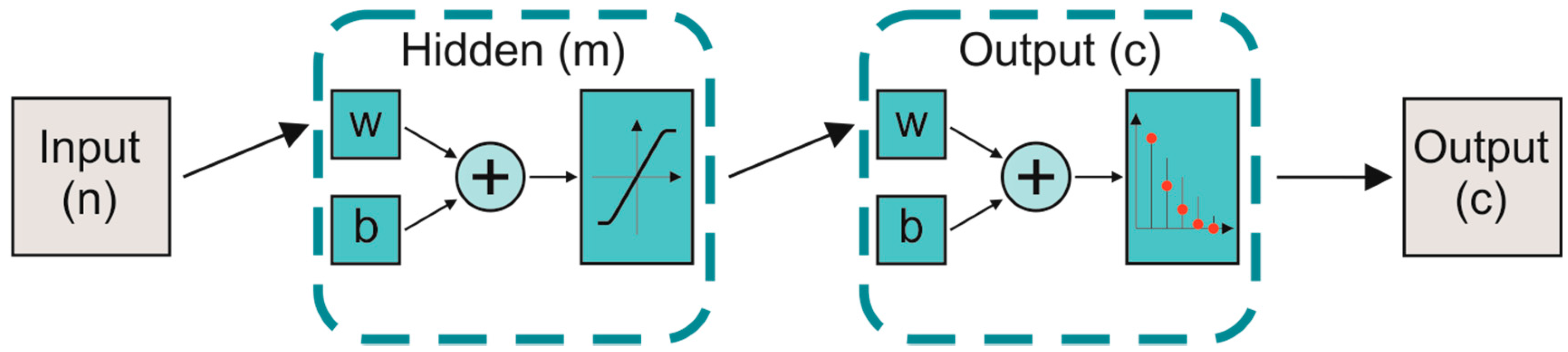
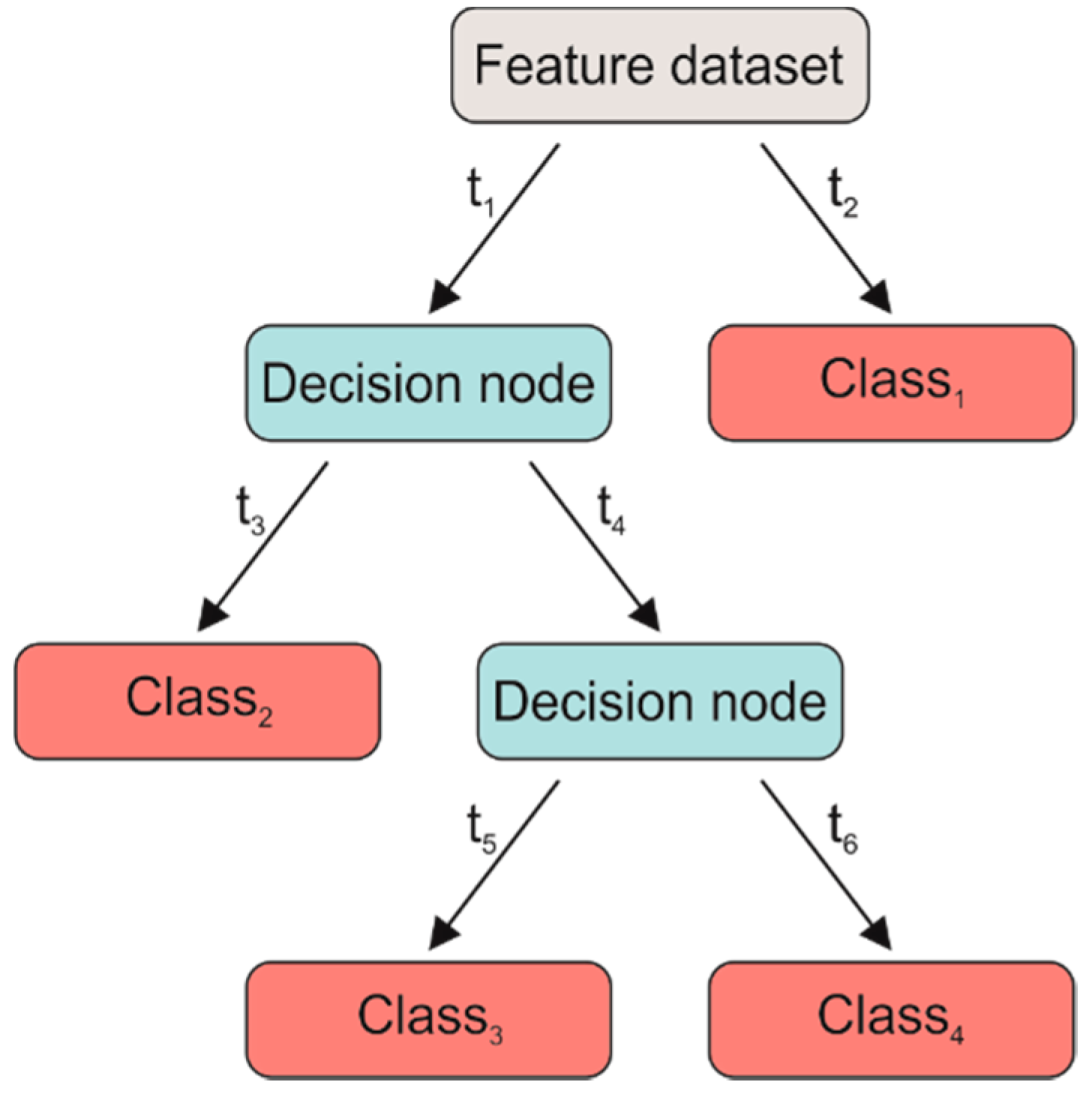
3.1. Theoretical Background
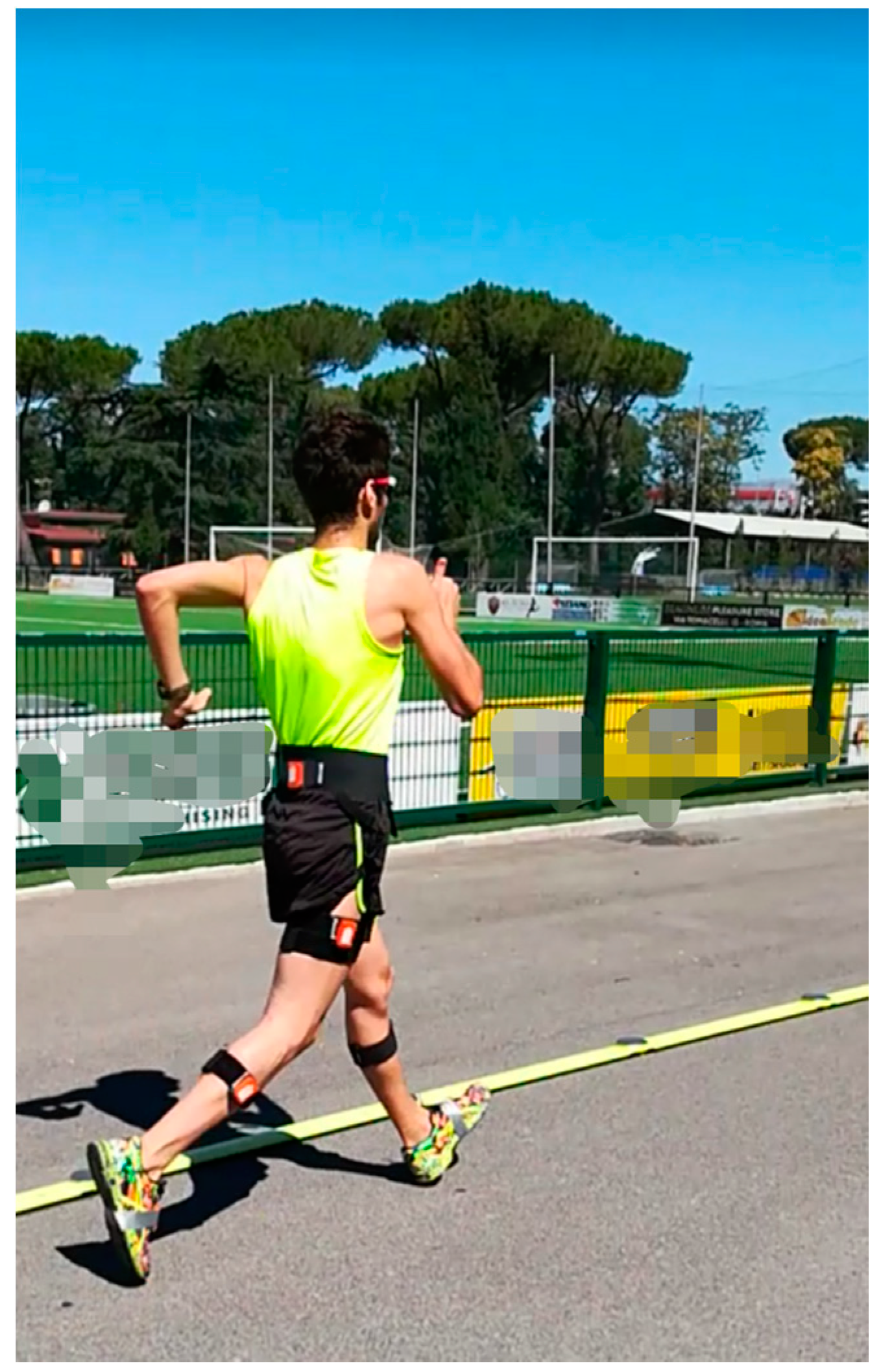
3.2. Experimental Protocol
3.3. Data Analysis
- C is the name of the classifier, which includes DTf, SVMl, SVMq, SVMc, kNNf, kNNc, kNNcu, kNNw, and ANN;
- s is the segment, which is pelvis (PL), thigh (TH), shank (SH), and foot (FT); and
- d is the dataset, which is composed of signals of accelerations (a), angular velocities (ω), and accelerations and angular velocities together (aω).
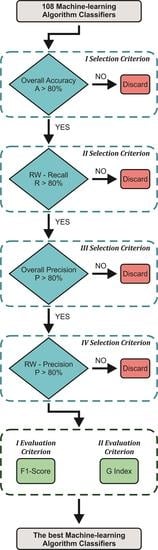
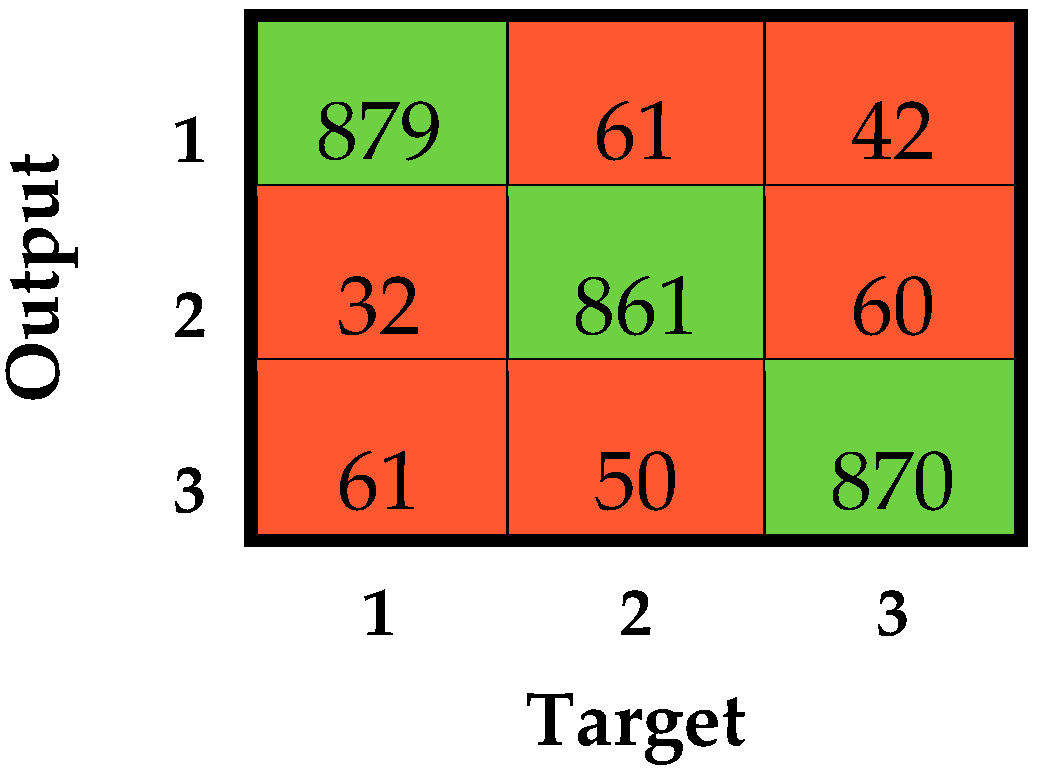
3.4. Performance Evaluation
4. Results and Discussions
5. Conclusions
6. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Association of Athletics Federations. Competition Rules; Imprimerie Multiprint: Municipality, Monaco, 2011; pp. 228–236. [Google Scholar]
- Westerfield, G.A. The use of Biomechanics in the judging of race walking. In Proceedings of the International Race Walk Forum, Shenzhen, China, 23 March 2007; pp. 1–14. [Google Scholar]
- Knicker, A.; Loch, M. Race walking technique and judging-The final report of the International Athletic Foundation research project. N. Stud. Athl. 1990, 5, 3–25. [Google Scholar]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 3rd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Simons, D.J.; Chabris, C.F.; Schnur, T.; Levin, D.T. Evidence for preserved representations in change blindness. Conscious. Cogn. 2002, 11, 78–97. [Google Scholar] [CrossRef] [PubMed]
- Osterhoudt, R.G. The Grace and Disgrace of Race Walking. Available online: http://www.coachr.org/rw2.htm (accessed on 10 July 2018).
- Wei, Y.; Liu, L.; Zhong, J.; Lu, Y.; Sun, L. Unsupervised Race Walking Recognition Using Smartphone Accelerometers. In Proceedings of the International Conference on Knowledge Science, Engineering and Management, Chongqing, China, 28–30 October 2015; pp. 691–702. [Google Scholar]
- Lu, Y.; Wei, Y.; Liu, L.; Zhong, J.; Sun, L.; Liu, Y. Towards unsupervised physical activity recognition using smartphone accelerometers. Multimed. Tools Appl. 2017, 76, 10701–10719. [Google Scholar] [CrossRef]
- Mannini, A.; Sabatini, A.M. Machine learning methods for classifying human physical activity from on-body accelerometers. Sensors 2010, 10, 1154–1175. [Google Scholar] [CrossRef]
- Khan, A.M.; Lee, Y.-K.; Lee, S.Y.; Kim, T.-S. A Triaxial Accelerometer-Based Physical-Activity Recognition via Augmented-Signal Features and a Hierarchical Recognizer. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1166–1172. [Google Scholar] [CrossRef]
- Sousa, W.; Souto, E.; Rodrigres, J.; Sadarc, P.; Jalali, R.; El-Khatib, K. A Comparative Analysis of the Impact of Features on Human Activity Recognition with Smartphone Sensors. In Proceedings of the 23rd Brazillian Symposium on Multimedia and the Web—WebMedia’17, Gramado, Brazil, 17–20 October 2017; pp. 397–404. [Google Scholar]
- Taborri, J.; Scalona, E.; Rossi, S.; Palermo, E.; Patanè, F.; Cappa, P. Real-time gait detection based on Hidden Markov Model: Is it possible to avoid training procedure? In Proceedings of the 2015 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Torino, Italy, 7–9 May 2015; pp. 141–145. [Google Scholar]
- Mileti, I.; Germanotta, M.; Di Sipio, E.; Imbimbo, I.; Pacilli, A.; Erra, C.; Petracca, M.; Rossi, S.; Del Prete, Z.; Bentivoglio, A.R.; et al. Measuring Gait Quality in Parkinson’s Disease through Real-Time Gait Phase Recognition. Sensors 2018, 18, 919. [Google Scholar] [CrossRef] [PubMed]
- Mannini, A.; Sabatini, A.M. Gait phase detection and discrimination between walking–jogging activities using hidden Markov models applied to foot motion data from a gyroscope. Gait Posture 2012, 36, 657–661. [Google Scholar] [CrossRef] [PubMed]
- Taborri, J.; Rossi, S.; Palermo, E.; Patanè, F.; Cappa, P. A Novel HMM Distributed Classifier for the Detection of Gait Phases by Means of a Wearable Inertial Sensor Network. Sensors 2014, 14, 16212–16234. [Google Scholar] [CrossRef]
- Taborri, J.; Rossi, S.; Palermo, E.; Cappa, P. A HMM distributed classifier to control robotic knee module. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 277–282. [Google Scholar]
- Ermes, M.; Parkka, J.; Mantyjarvi, J.; Korhonen, I. Detection of Daily Activities and Sports With Wearable Sensors in Controlled and Uncontrolled Conditions. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 20–26. [Google Scholar] [CrossRef]
- Avci, A.; Bosch, S.; Marin-Perianu, M.; Marin-Perianu, R.; Havinga, P. Activity Recognition Using Inertial Sensing for Healthcare, Wellbeing and Sports Applications: A Survey. In Proceedings of the 23th International Conference on Architecture of Computing Systems, Hannover, Germany, 22–25 February 2010. [Google Scholar]
- Long, X.; Yin, B.; Aarts, R.M. Single-accelerometer-based daily physical activity classification. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 6107–6110. [Google Scholar]
- Heinz, E.; Kunze, K.; Gruber, M.; Bannach, D.; Lukowicz, P. Using Wearable Sensors for Real-Time Recognition Tasks in Games of Martial Arts an Initial Experiment. In Proceedings of the 2006 IEEE Symposium on Computational Intelligence and Games, Reno, NV, USA, 22–24 May 2006; pp. 98–102. [Google Scholar]
- Santoso, D.; Setyanto, T. Development of Precession Instrumentation System for Differentiate Walking from Running in Race Walking by Using Piezoelectric Sensor. Sens. Trans. J. 2013, 155, 120–127. [Google Scholar]
- Lee, J.B.; Mellifont, R.B.; Burkett, B.J.; James, D.A. Detection of illegal race walking: A tool to assist coaching and judging. Sensors 2013, 13, 16065–16074. [Google Scholar] [CrossRef] [PubMed]
- Little, C.; Lee, J.B.; James, D.A.; Davison, K. An evaluation of inertial sensor technology in the discrimination of human gait. J. Sports Sci. 2013, 31, 1312–1318. [Google Scholar] [CrossRef] [PubMed]
- di Gironimo, G.; Caporaso, T.; del Giudice, D.M.; Tarallo, A.; Lanzotti, A. Development of a New Experimental Protocol for Analysing the Race-walking Technique Based on Kinematic and Dynamic Parameters. Procedia Eng. 2016, 147, 741–746. [Google Scholar] [CrossRef]
- di Gironimo, G.; Caporaso, T.; del Giudice, D.M.; Lanzotti, A. Towards a new monitoring system to detect illegal steps in race-walking. Int. J. Interact. Des. Manuf. 2017, 11, 317–329. [Google Scholar] [CrossRef]
- di Gironimo, G.; Caporaso, T.; Amodeo, G.; del Giudice, D.M.; Lanzotti, A.; Odenwald, S. Outdoor Tests for the Validation of an Inertial System Able to Detect Illegal Steps in Race-walking. Procedia Eng. 2016, 147, 544–549. [Google Scholar] [CrossRef]
- Ciu, Y. Intelligent wireless monitoring system for foul play in a walking race based on UWB. In Proceedings of the 2nd ETP/IITA Conference on Telecommunication and Information, Phuket, Thailand, 3–4 April 2011. [Google Scholar]
- Chowdhury, A.K.; Tjondronegoro, D.; Chandran, V.; Trost, S.G. Ensemble Methods for Classification of Physical Activities from Wrist Accelerometry. Med. Sci. Sport. Exerc. 2017, 49, 1965–1973. [Google Scholar] [CrossRef]
- Maglogiannis, I.G.; Karpouzis, K.; Wallace, B.A.; Soldatos, J. (Eds.) Emerging Artificial Intelligence Applications in Computer Engineering: Real Word AI Systems with Applications in EHealth, HCI, Information Retrieval and Pervasive Technologies; IOS Press: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Preece, S.J.; Goulermas, J.Y.; Kenney, L.P.; Howard, D.; Meijer, K.; Crompton, R. Activity Identification Using Body-Mounted Sensors-A Review of Classification Techniques. Physiol. Meas. 2009, 30, 1–33. [Google Scholar] [CrossRef]
- Robert, M.; Gorria, P.; Miteran, J.; Turgis, S. Design of a real time geometric classifier. In Proceedings of the European Design and Test Conference EDAC-ETC-EUROASIC, Paris, France, 28 February–3 March 1994; p. 656. [Google Scholar]
- Bengio, Y.; Boulanger-Lewandowski, N.; Pascanu, R. Advances in Optimizing Recurrent Networks. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Johnson, J.M.; Yadav, A. Fault Detection and Classification Technique for HVDC Transmission Lines Using KNN. In Information and Communication Technology for Sustainable Development; Springer: Singapore, 2017; pp. 245–253. [Google Scholar]
- Agatonovic-Kustrin, S.; Beresford, R. Basic concepts of artificial neural network (ANN) modeling and its application in pharmaceutical research. J. Pharm. Biomed. Anal. 2000, 22, 717–727. [Google Scholar] [CrossRef]
- Coates, A.; Lee, H.; Ng, A.Y. An Analysis of Single-Layer Networks in Unsupervised Feature Learning. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Lauderdale, FL, USA, 11–13 April 2011; Volume 15. [Google Scholar]
- Mathie, M.J.; Celler, B.G.; Lovell, N.H.; Coster, A.C.F. Classification of basic daily movements using a triaxial accelerometer. Med. Biol. Eng. Comput. 2004, 42, 679–687. [Google Scholar] [CrossRef] [PubMed]
- Hausdorff, J.M.; Zemany, L.; Peng, C.; Goldberger, A.L. Maturation of gait dynamics: Stride-to-stride variability and its temporal organization in children. Appl. Physiol. 1999, 86, 1040–1047. [Google Scholar] [CrossRef]
- Salarian, A.; Russmann, H.; Vingerhoets, F.J.G.; Dehollain, C.; Blanc, Y.; Burkhard, P.R.; Aminian, K. Gait Assessment in Parkinson’s Disease: Toward an Ambulatory System for Long-Term Monitoring. IEEE Trans. Biomed. Eng. 2004, 518, 1434–1443. [Google Scholar] [CrossRef]
- Abaid, N.; Cappa, P.; Palermo, E.; Petrarca, M.; Porfiri, M. Gait detection in children with and without hemiplegia using single-axis wearable gyroscopes. PLoS ONE 2013, 8, e73152. [Google Scholar] [CrossRef] [PubMed]
- Mannini, A.; Trojaniello, D.; Cereatti, A.; Sabatini, A. A Machine Learning Framework for Gait Classification Using Inertial Sensors: Application to Elderly, Post-Stroke and Huntington’s Disease Patients. Sensors 2016, 16, 134. [Google Scholar] [CrossRef] [PubMed]
- Taborri, J.; Scalona, E.; Palermo, E.; Rossi, S.; Cappa, P. Validation of Inter-Subject Training for Hidden Markov Models Applied to Gait Phase Detection in Children with Cerebral Palsy. Sensors 2015, 15, 24514–24529. [Google Scholar] [CrossRef] [PubMed]
- Neyman, J.; Pearson, E.S.; Yule, G.U. The testing of statistical hypotheses in relation to probabilities a priori. Math. Proc. Camb. Philos. Soc. 1933, 29, 492. [Google Scholar] [CrossRef]
- Mileti, I.; Germanotta, M.; Alcaro, S.; Pacilli, A.; Imbimbo, I.; Petracca, M.; Erra, C.; Di Sipio, E.; Aprile, I.; Rossi, S.; et al. Gait partitioning methods in Parkinson’s disease patients with motor fluctuations: A comparative analysis. In Proceedings of the 2017 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rochester, MN, USA, 7–10 May 2017; pp. 402–407. [Google Scholar]
- Goršič, M.; Kamnik, R.; Ambrozič, L.; Vitiello, N.; Lefeber, D.; Pasquini, G.; Munih, M. Online phase detection using wearable sensors for walking with a robotic prosthesis. Sensors 2014, 14, 2776–2794. [Google Scholar] [CrossRef] [PubMed]
- Bae, J.; Tomizuka, M. Gait phase analysis based on a Hidden Markov Model. Mechatronics 2011, 21, 961–970. [Google Scholar] [CrossRef]
- Attal, F.; Mohammed, S.; Dedabrishvili, M.; Chamroukhi, F. Physical Human Activity Recognition Using Wearable Sensors. Sensors 2015, 15, 31314–31338. [Google Scholar] [CrossRef]
- Dreiseitl, S.; Ohno-Machado, L. Logistic regression and artificial neural network classification models: A methodology review. J. Biomed. Inform. 2002, 35, 352–359. [Google Scholar] [CrossRef]
- Ong, C.S.; Smola, A.J.; Williamson, R.C. Learning the Kernel with Hyperkernels. J. Mach. Learn. Res. 2005, 6, 1043–1071. [Google Scholar]
- Sendra, S.; Granell, E.; Lloret, J.; Rodrigues, J.J.P.C. Smart Collaborative Mobile System for Taking Care of Disabled and Elderly People. Mob. Networks Appl. 2014, 19, 287–302. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gyroscope | Accelerometer | |
|---|---|---|
| Full Scale | ±1200 °/s | ±160 m/s2 |
| Linearity | 0.1% FS | 0.2% FS |
| Stability | 20 °/h | - |
| Noise | 0.05 °/s/√Hz | 0.003 m/s2/√Hz |
| Misalignment error | 0.1° | 0.1° |
| Bandwidth | 100 Hz | 100 Hz |
| Battery autonomy | 8 h | |
| Time Features | Frequency Features |
|---|---|
| Mean Standard deviation Maximum Minimum | Height of main peak of the autocorrelation Height of the second peak of the autocorrelation Position of the second peak of the autocorrelation |
| Variable | Segment | DTf | SVMl | SVMq | SVMc | kNNf | kNNc | kNNcu | kNNw | ANN |
|---|---|---|---|---|---|---|---|---|---|---|
| Acceleration | Pelvis | 0.70 (0.18) | 0.79 (0.20) | 0.76 (0.21) | 0.75 (0.21) | 0.73 (0.21) | 0.73 (0.21) | 0.73 (0.18) | 0.73 (0.23) | 0.75 (0.18) |
| Thighs | 0.75 (0.05) | 0.83 (0.11) | 0.83 (0.10) | 0.83 (0.10) | 0.77 (0.09) | 0.77 (0.11) | 0.76 (0.09) | 0.78 (0.10) | 0.79 (0.10) | |
| Shanks | 0.77 (0.07) | 0.84 (0.06) | 0.90 (0.02) | 0.88 (0.03) | 0.80 (0.08) | 0.79 (0.10) | 0.79 (0.07) | 0.81 (0.03) | 0.79 (0.08) | |
| Feet | 0.74 (0.06) | 0.86 (0.05) | 0.87 (0.05) | 0.87 (0.03) | 0.83 (0.04) | 0.82 (0.05) | 0.79 (0.04) | 0.82 (0.03) | 0.86 (0.04) | |
| Angular Velocity | Pelvis | 0.66 (0.16) | 0.72 (0.19) | 0.76 (0.21) | 0.75 (0.21) | 0.73 (0.22) | 0.73 (0.21) | 0.72 (0.20) | 0.74 (0.22) | 0.69 (0.21) |
| Thighs | 0.70 (0.10) | 0.79 (0.09) | 0.79 (0.09) | 0.79 (0.08) | 0.75 (0.09) | 0.76 (0.09) | 0.73 (0.08) | 0.76 (0.10) | 0.72 (0.13) | |
| Shanks | 0.69 (0.06) | 0.73 (0.12) | 0.74 (0.12) | 0.74 (0.12) | 0.73 (0.08) | 0.73 (0.10) | 0.70 (0.09) | 0.74 (0.08) | 0.71 (0.08) | |
| Feet | 0.71 (0.06) | 0.76 (0.15) | 0.75 (0.15) | 0.74 (0.18) | 0.73 (0.17) | 0.74 (0.18) | 0.70 (0.16) | 0.74 (0.17) | 0.73 (0.15) | |
| Acceleration and Angular Velocity | Pelvis | 0.72 (0.16) | 0.80 (0.18) | 0.81 (0.18) | 0.79 (0.20) | 0.78 (0.19) | 0.77 (0.20) | 0.75 (0.19) | 0.78 (0.19) | 0.74 (0.22) |
| Thighs | 0.76 (0.08) | 0.81 (0.10) | 0.82 (0.11) | 0.80 (0.10) | 0.79 (0.08) | 0.79 (0.10) | 0.74 (0.09) | 0.79 (0.08) | 0.76 (0.11) | |
| Shanks | 0.78 (0.08) | 0.80 (0.10) | 0.88 (0.04) | 0.87 (0.04) | 0.79 (0.07) | 0.79 (0.08) | 0.78 (0.07) | 0.81 (0.07) | 0.78 (0.10) | |
| Feet | 0.71 (0.09) | 0.85 (0.08) | 0.83 (0.15) | 0.83 (0.14) | 0.79 (0.14) | 0.80 (0.13) | 0.75 (0.18) | 0.81 (0.11) | 0.80 (0.14) |
| Condition | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pelvis | Regular | - | - | - | - | - | - | - | 0.81 (0.31) | 0.78 (0.30) | - | - | - | - |
| LC | - | - | - | - | - | - | - | 0.82 (0.16) | 0.84 (0.16) | - | - | - | - | |
| KB | - | - | - | - | - | - | - | 0.78 (0.07) | 0.80 (0.18) | - | - | - | - | |
| Thigh | Regular | 0.87 (0.11) | 0.86 (0.11) | 0.87 (0.12) | - | - | - | - | 0.79 (0.24) | 0.81 (0.20) | 0.83 (0.17) | - | - | - |
| LC | 0.90 (0.14) | 0.90 (0.04) | 0.89 (0.04) | - | - | - | - | 0.91 (0.07) | 0.90 (0.06) | 0.83 (0.16) | - | - | - | |
| KB | 0.71 (0.29) | 0.72 (0.29) | 0.73 (0.27) | - | - | - | - | 0.74 (0.30) | 0.75 (0.30) | 0.74 (0.29) | - | - | - | |
| Shank | Regular | 0.80 (0.14) | 0.91 (0.05) | 0.90 (0.05) | 0.79 (0.23) | - | 0.77 (0.25) | - | 0.71 (0.28) | 0.86 (0.10) | 0.86 (0.10) | - | 0.81 (0.18) | - |
| LC | 0.85 (0.12) | 0.89 (0.06) | 0.88 (0.06) | 0.81 (0.08) | - | 0.82 (0.06) | - | 0.85 (0.10) | 0.90 (0.05) | 0.89 (0.05) | - | 0.81 (0.09) | - | |
| KB | 0.88 (0.05) | 0.90 (0.04) | 0.88 (0.05) | 0.81 (0.14) | - | 0.83 (0.11) | - | 0.83 (0.07) | 0.86 (0.06) | 0.86 (0.05) | - | 0.81 (0.09) | - | |
| Foot | Regular | 0.86 (0.15) | 0.87 (0.14) | 0.89 (0.08) | 0.90 (0.13) | 0.85 (0.19) | 0.89 (0.14) | 0.85 (0.15) | 0.81 (0.20) | 0.80 (0.28) | 0.81 (0.26) | 0.82 (0.17) | 0.85 (0.17) | 0.82 (0.17) |
| LC | 0.85 (0.05) | 0.87 (0.07) | 0.87 (0.08) | 0.75 (0.14) | 0.83 (0.10) | 0.76 (0.14) | 0.85 (0.07) | 0.84 (0.07) | 0.87 (0.09) | 0.84 (0.08) | 0.82 (0.08) | 0.76 (0.10) | 0.83 (0.09) | |
| KB | 0.88 (0.06) | 0.86 (0.09) | 0.85 (0.08) | 0.81 (0.12) | 0.80 (0.14) | 0.82 (0.10) | 0.88 (0.06) | 0.89 (0.06) | 0.81 (0.22) | 0.84 (0.16) | 0.76 (0.22) | 0.82 (0.17) | 0.76 (0.29) |
| Third Criterion | Fourth Criterion | ||||
|---|---|---|---|---|---|
| Segment | Classifier | Overall Precision | Regular | Loss of Contact | Knee-Bent |
| Shanks | 0.85 (0.08) | 0.79 (0.17) | 0.93 (0.05) | 0.82 (0.10) | |
| 0.90 (0.01) | 0.89 (0.05) | 0.92 (0.05) | 0.89 (0.04) | ||
| 0.90 (0.02) | 0.89 (0.04) | 0.92 (0.05) | 0.89 (0.04) | ||
| 0.89 (0.02) | 0.88 (0.04) | 0.91 (0.06) | 0.90 (0.05) | ||
| 0.89 (0.02) | 0.87 (0.04) | 0.91 (0.06) | 0.89 (0.05) | ||
| 0.85 (0.08) | 0.79 (0.05) | 0.94 (0.05) | 0.82 (0.14) | ||
| Feet | 0.88 (0.06) | 0.84 (0.06) | 0.95 (0.04) | 0.85 (0.10) | |
| 0.89 (0.05) | 0.86 (0.07) | 0.94 (0.07) | 0.87 (0.08) | ||
| 0.89 (0.03) | 0.86 (0.07) | 0.93 (0.07) | 0.88 (0.07) | ||
| 0.85 (0.05) | 0.79 (0.05) | 0.89 (0.06) | 0.85 (0.07) | ||
| 0.83 (0.05) | 0.82 (0.06) | 0.79 (0.09) | 0.88 (0.05) | ||
| 0.86 (0.07) | 0.79 (0.06) | 0.93 (0.07) | 0.84 (0.12) | ||
| 0.83 (0.04) | 0.78 (0.14) | 0.88 (0.19) | 0.82 (0.17) | ||
| 0.84 (0.05) | 0.79 (0.10) | 0.89 (0.18) | 0.84 (0.12) | ||
| Segment | Classifier | Race Walking Condition | |||
|---|---|---|---|---|---|
| Overall | Regular | Loss of Contact | Knee-Bent | ||
| Shanks | (1) | 0.89 (0.03) | 0.89 (0.05) | 0.90 (0.05) | 0.89 3,4,5,6,7 (0.04) |
| (2) | 0.89 (0.03) | 0.89 (0.04) | 0.90 (0.05) | 0.88 6,7 (0.03) | |
| (3) | 0.88 (0.03) | 0.87 (0.06) | 0.90 (0.04) | 0.86 1 (0.05) | |
| (4) | 0.88 (0.03) | 0.87 (0.06) | 0.90 (0.04) | 0.87 1 (0.05) | |
| Feet | (5) | 0.85 (0.06) | 0.82 (0.14) | 0.89 (0.05) | 0.85 1 (0.07) |
| (6) | 0.86 (0.05) | 0.83 (0.12) | 0.90 (0.06) | 0.85 1,2 (0.05) | |
| (7) | 0.87 (0.03) | 0.86 (0.06) | 0.89 (0.06) | 0.85 1,2 (0.04) | |
| Segment | Classifier | Overall Accuracy | Goodness Index |
|---|---|---|---|
| Shanks | 0.93 | 0.11 | |
| 0.92 | 0.12 | ||
| 0.91 | 0.15 | ||
| 0.91 | 0.15 | ||
| Feet | 0.90 | 0.15 | |
| 0.90 | 0.15 | ||
| 0.90 | 0.13 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taborri, J.; Palermo, E.; Rossi, S. Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data. Sensors 2019, 19, 1461. https://doi.org/10.3390/s19061461
Taborri J, Palermo E, Rossi S. Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data. Sensors. 2019; 19(6):1461. https://doi.org/10.3390/s19061461
Chicago/Turabian StyleTaborri, Juri, Eduardo Palermo, and Stefano Rossi. 2019. "Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data" Sensors 19, no. 6: 1461. https://doi.org/10.3390/s19061461
APA StyleTaborri, J., Palermo, E., & Rossi, S. (2019). Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data. Sensors, 19(6), 1461. https://doi.org/10.3390/s19061461