Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things

 ,
,  and
and 
Abstract
:1. Introduction
- Synchronization based on a known reference label. Here, the time difference between the signals from the reference label or mobile label and the two fixed base stations is called the single-difference. The difference between the known reference label and another mobile label is defined as the double-difference, which eliminates the clock differences of both the base stations and the labels. This algorithm is inherited from the GPS double-difference observation algorithm and is very common in pseudo-satellite and Locata indoor positioning [7,8]. Both GPS and Locata have base station (or satellite) transmitting signals, but this time synchronization technology is also suitable for label transmitting signals. It is also used in UWB positioning [9]. However, in a complex and ever-changing indoor environment, it is difficult to observe a reference label with a known position without obstruction in the whole process. In addition, base stations and labels need to have the functions of receiving signals and sending signals, and the transmitter must send signals at specified time intervals, which increases the complexity of the device. Therefore, it is only suitable for large and high-cost projects, and is difficult to expand to popular applications.
- Synchronization based on two-way ranging. In this scheme, both base stations and labels are transceivers. The label (or base station) receives the signal sent by the base station (or label) and forwards it back. After receiving the response signal, the base station (or label) can calculate the distance to the label (or base station) by calculating the time interval between the sent and the rebound signal. Scholars have proposed a scheme to achieve wireless (UWB) clock synchronization by using two-way message exchange [10,11]. The principle of this scheme is simple, and the accuracy is high. However, the base stations and labels must be transceivers. Therefore, the hardware structure of the system is complex, the cost of equipment is high, and the amount of communication is large, and it is difficult to extend it for popular applications, too [12].
- Synchronization based on timestamp [13]. In this method, the master base station uses the physical layer broadcast function to periodically send messages to the slave base stations. The slave base station uses the arrival time of the message as the reference point of its own clock. The broadcast message contains accurate timestamp. Although this method has less anti-interference compared to other methods, the device of this scheme is simple and the communication volume is small, leading it to be widely used in UWB clock synchronization [14].
2. Time Synchronization and Algorithm
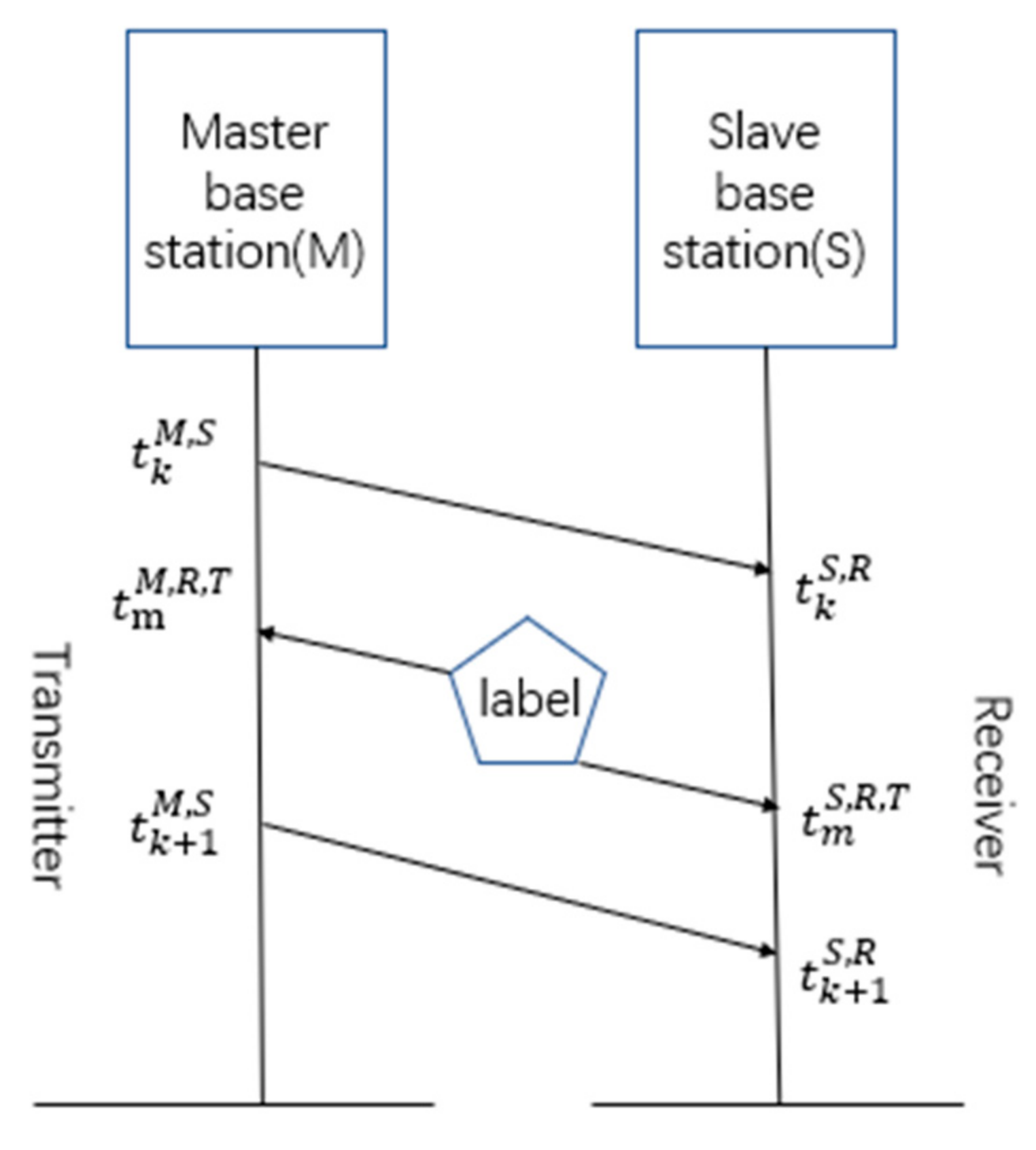
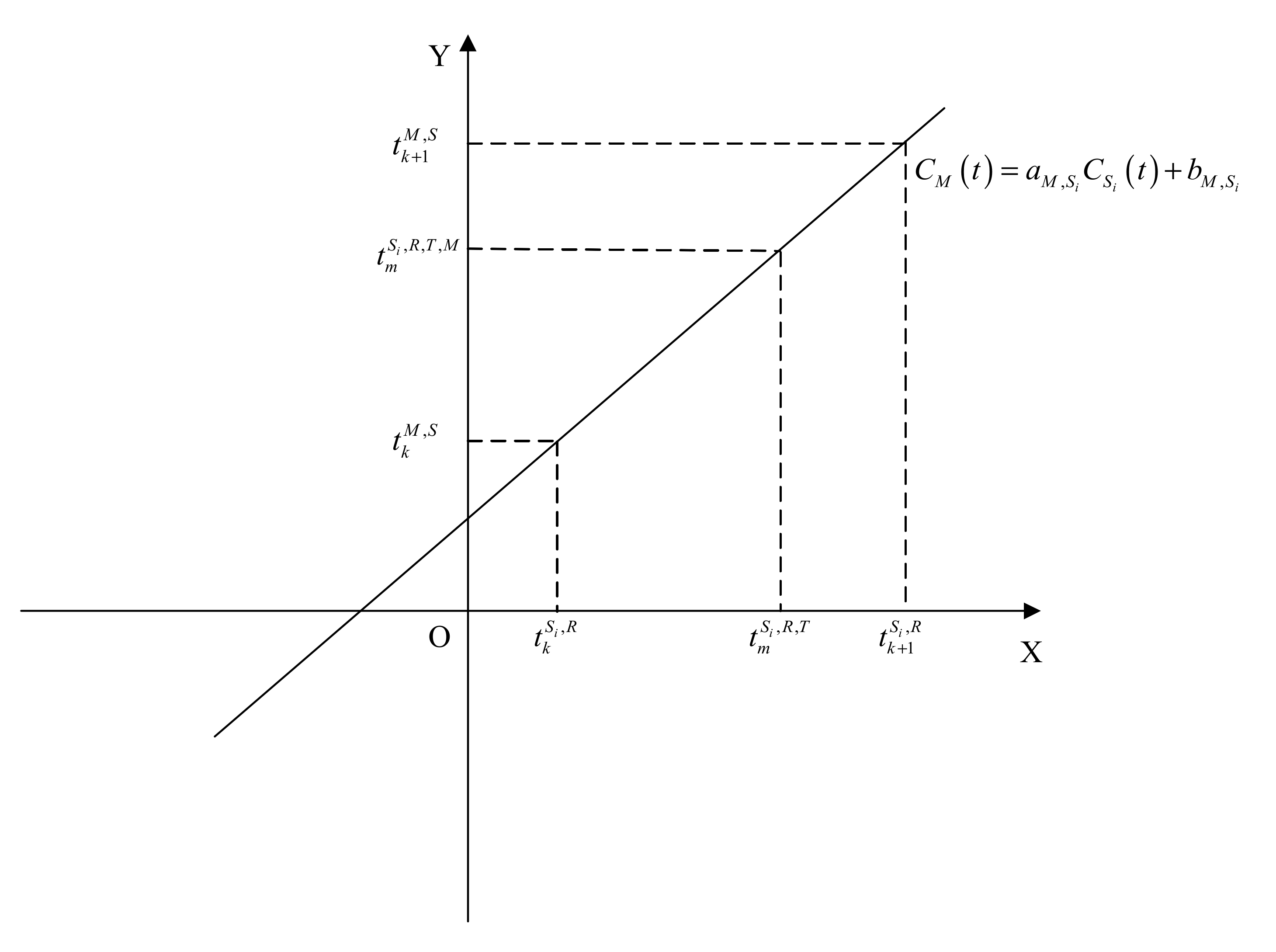
2.1. Clock Synchronization Modeling
- (1)
- The master base station sends a synchronization packet (including the transmission time of the synchronization packet ) to the slave base station. After receiving the synchronization packet, the slave base station saves and the local time at that moment.
- (2)
- The label sends a positioning packet . After receiving the positioning packet, each base station saves the local time ( or ) at that moment.
- (3)
- The master base station sends a synchronization packet (including the transmission time of the synchronization packet ) to the slave base station. After receiving the synchronization packet, the slave base station saves and the local time at that moment.
2.2. Error Calibration Method
2.3. WLS and Taylor Cooperating Algorithm
3. Experimental Verification
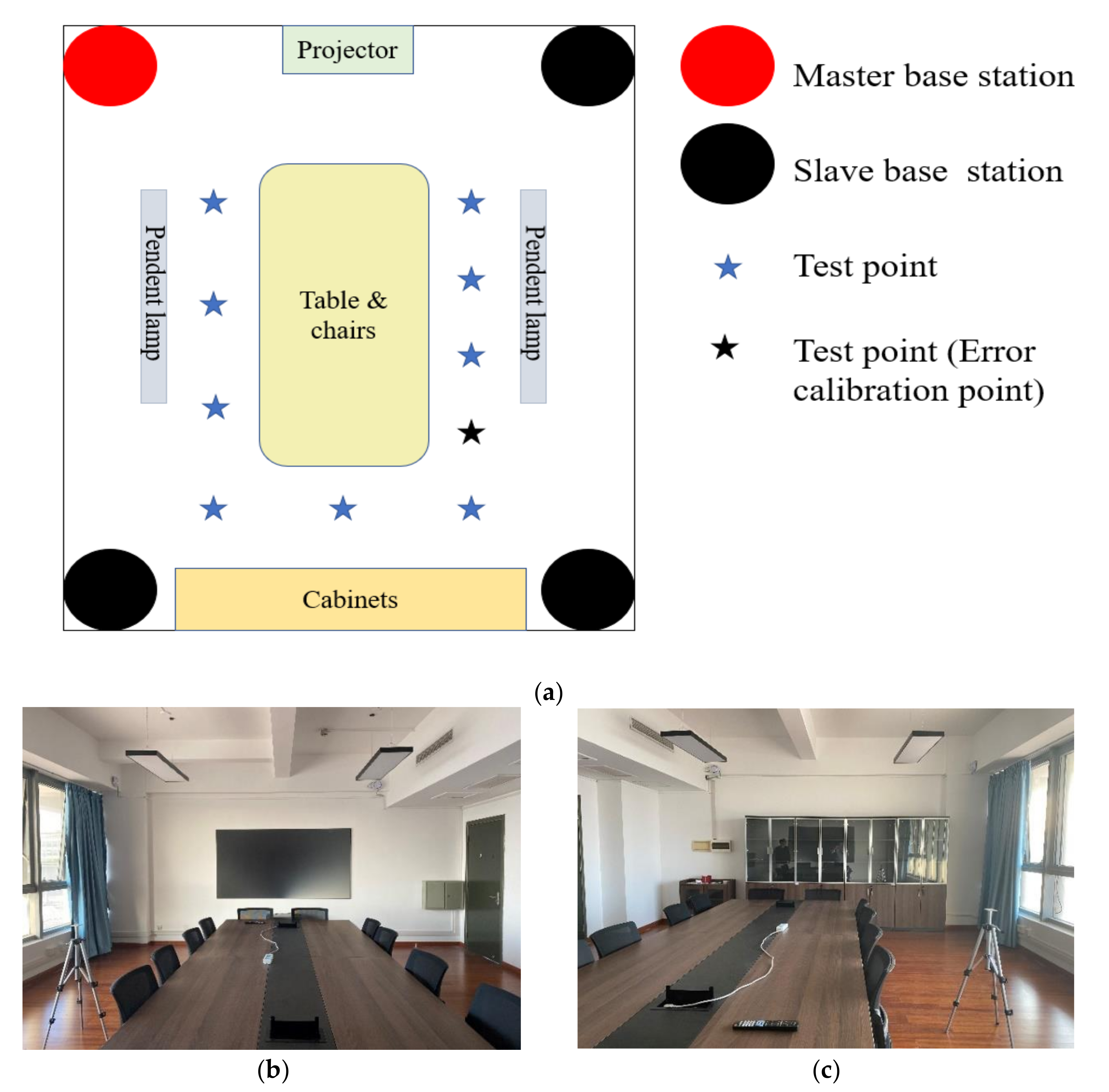
3.1. Experimental Environment
3.2. Accuracy Evaluation
3.3. Results Analysis and Discussion
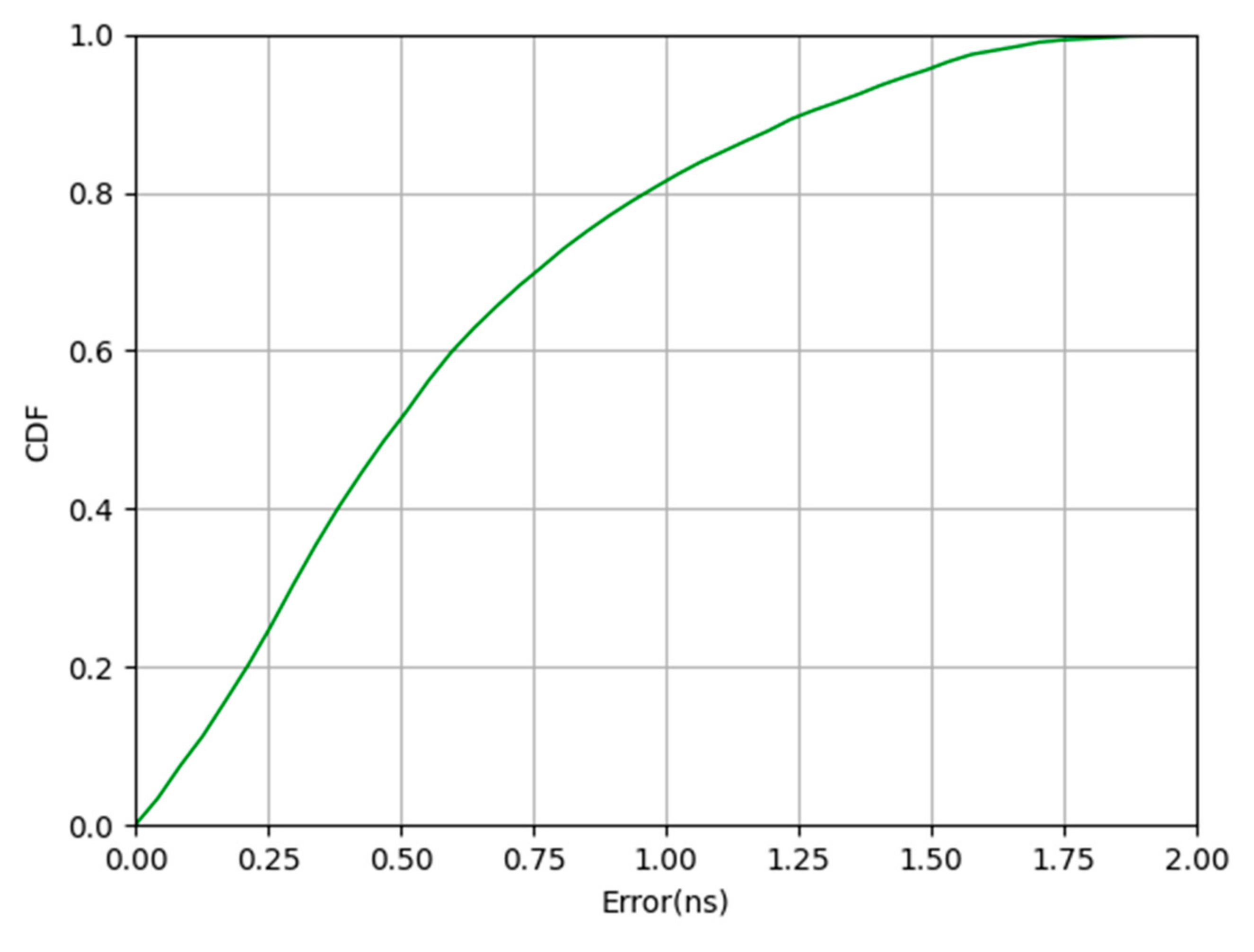
3.3.1. Experimental Analysis of Time Synchronization
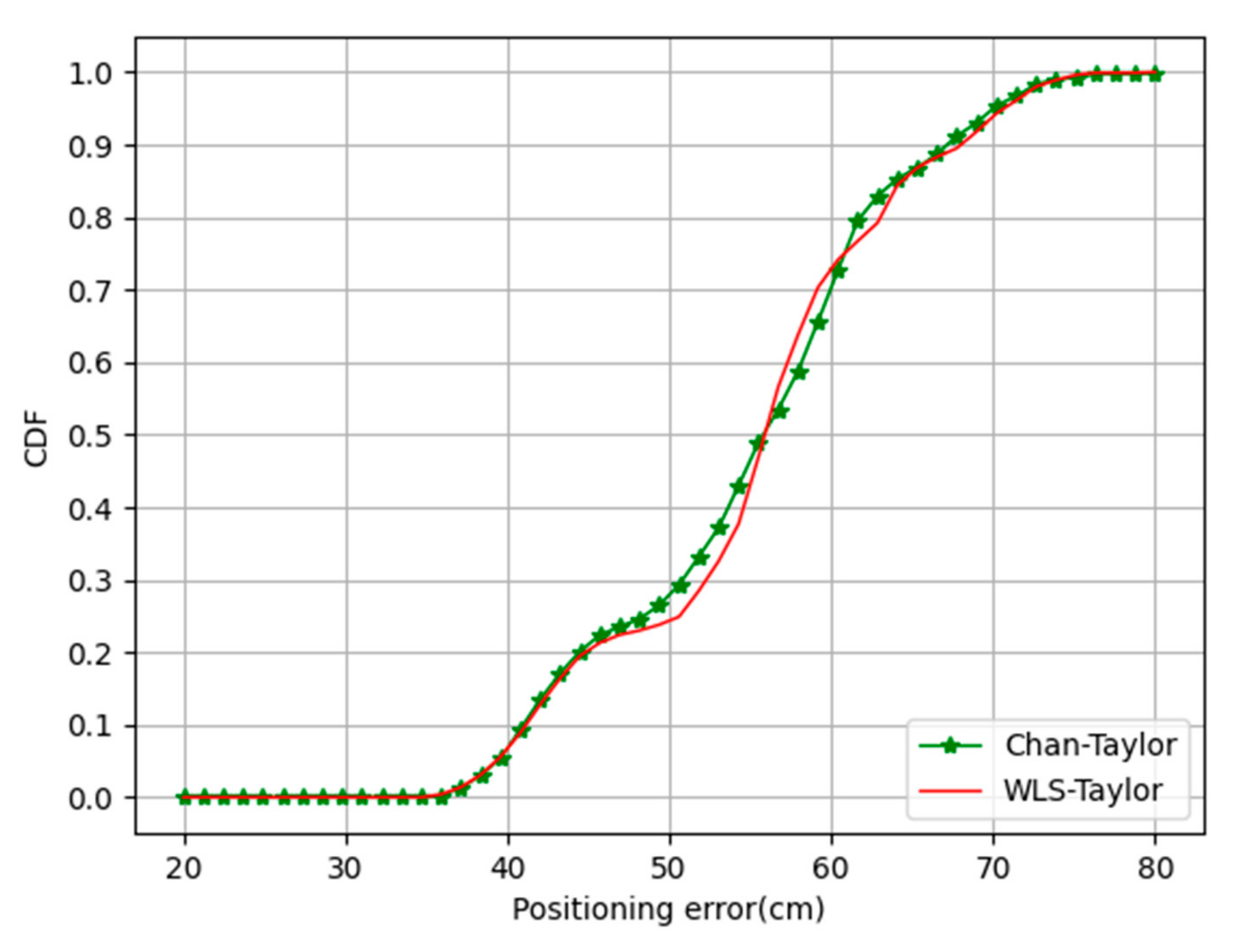
3.3.2. Experimental Analysis of the WLS-Taylor Algorithm
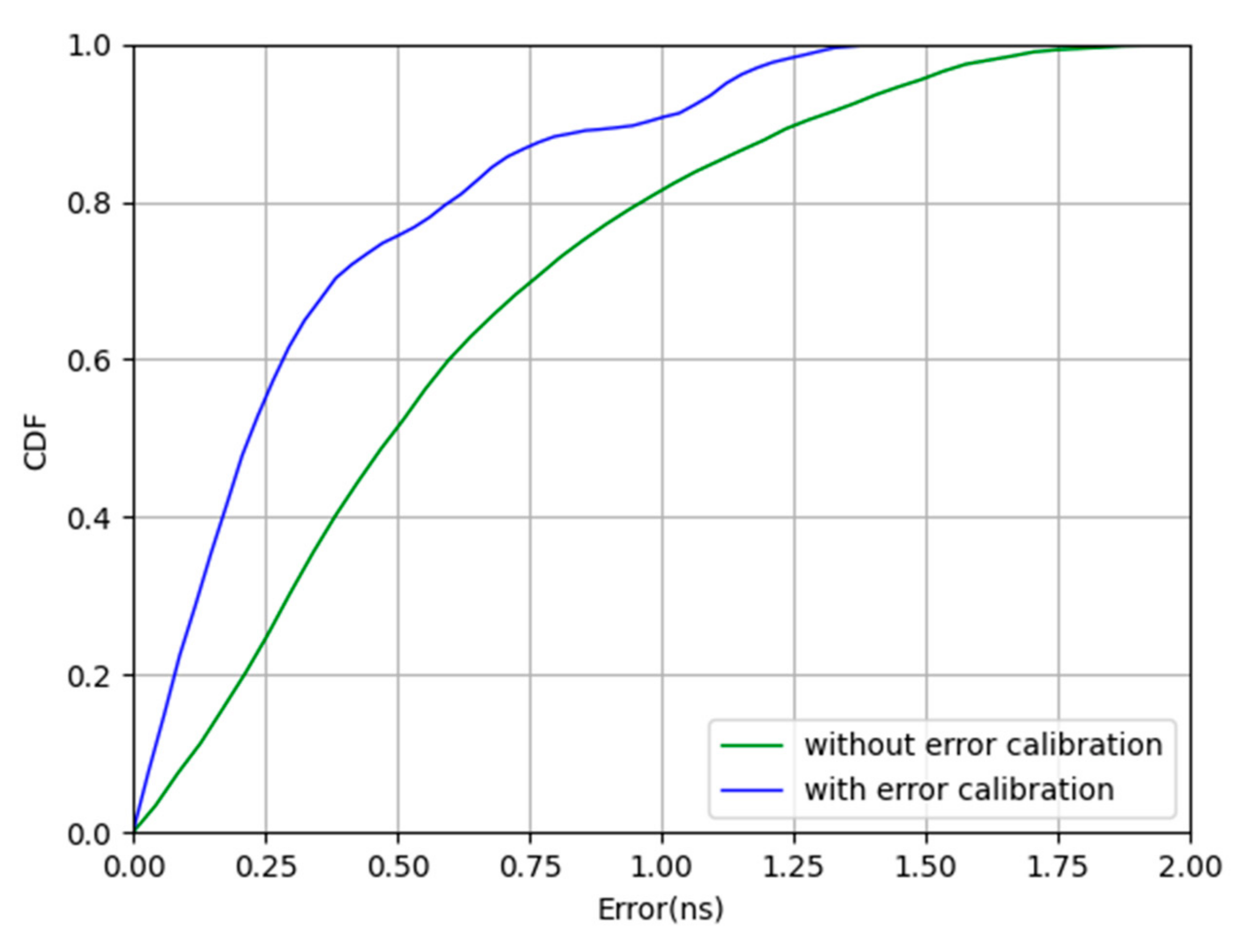
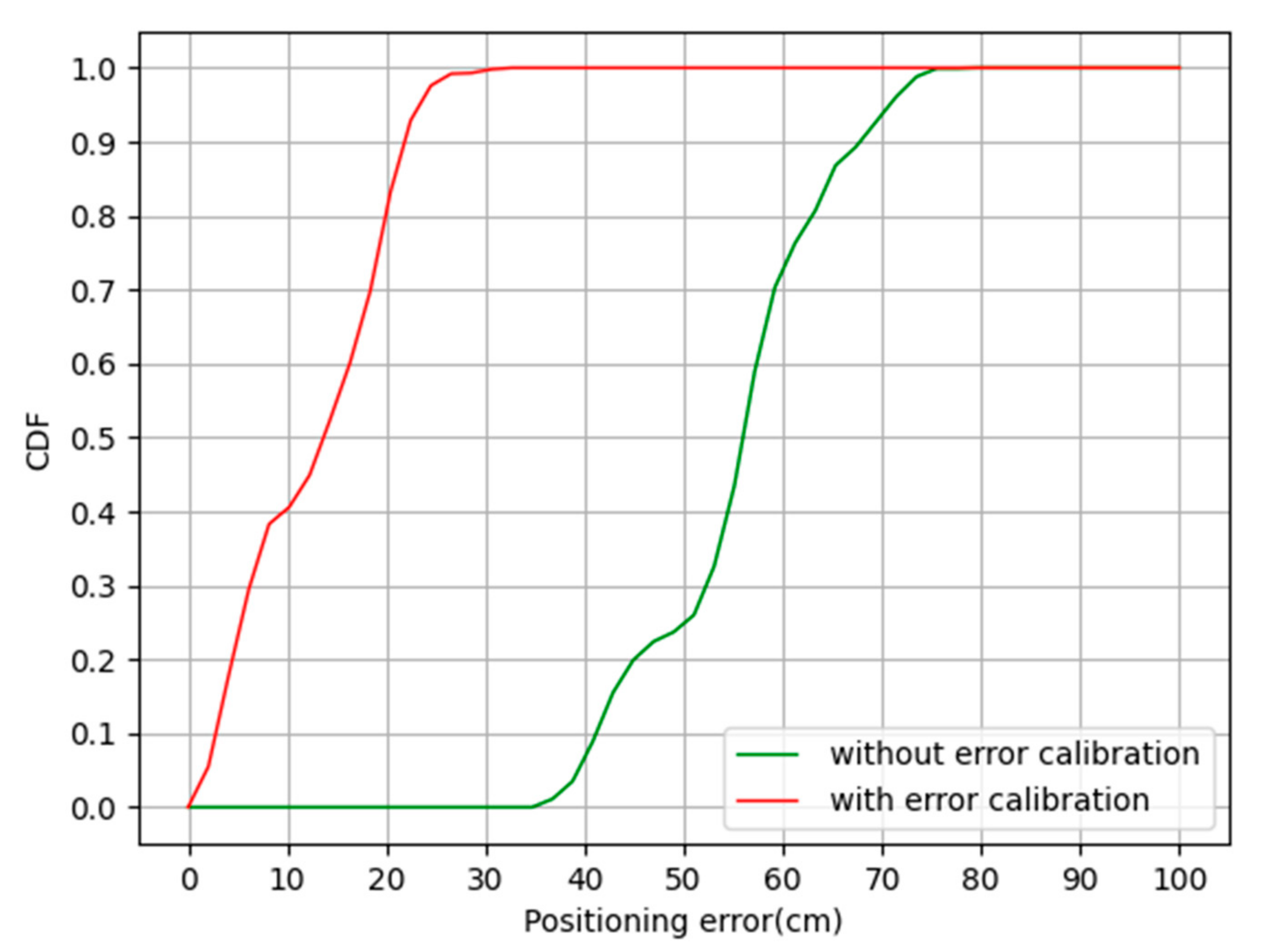
3.3.3. Experimental Analysis of Error Calibration
4. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Del Peral-Rosado, J.A.; Seco-Granados, G.; Raulefs, R.; Leitinger, E. Whitepaper on New Localization Methods for 5G Wireless Systems and the Internet-of-Things; COST Action CA15104; European Cooperation in Science and Technology (COST): Brussels, Belgium, April 2018. [Google Scholar]
- ETSI Home Page. Available online: https://www.etsi.org/deliver/etsi_ts/123500_123599/123502/15.02.00_60/ts_123502v150200p.pdf (accessed on 28 June 2018).
- Seco, F.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An Improved BLE Indoor Localization with Kalman-Based Fusion: An Experimental Study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, K. Time Synchronization for Wierless Sensor Networks using the Principle of Radar Systems and UWB Signals. In Proceedings of the 2006 IEEE International Conference on Information Acquisition, Weihai, China, 20–23 August 2006; pp. 160–165. [Google Scholar]
- Dai, L.; Rizos, C.; Wang, J. The Role of Pseudo-Satellite Signals in Precise GPS-Based Positioning. J. Geospat. Eng. 2001, 3, 33–34. [Google Scholar]
- Li, X.; Zhao, M.; Liu, Y.; Li, L.; Ding, Z.; Nallanathan, A. Secrecy Analysis of Ambient Backscatter NOMA Systems under I/Q Imbalance. IEEE Trans. Veh. Technol. 2020, 1. [Google Scholar] [CrossRef]
- Liu, D.; Sheng, B.; Hou, F.; Rao, W.; Liu, H. From Wireless Positioning to Mobile Positioning: An Overview of Recent Advances. IEEE Syst. J. 2014, 8, 1249–1259. [Google Scholar] [CrossRef]
- Hach, R.; Rommel, A. Wireless synchronization in time difference of arrival based real time locating systems. In Proceedings of the 2012 9th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 15–16 March 2012; pp. 193–195. [Google Scholar]
- Li, X.; Mengyan, H.; Liu, Y.; Menon, V.G.; Paul, A.; Ding, Z. I/Q Imbalance Aware Nonlinear Wireless-Powered Relaying of B5G Networks: Security and Reliability Analysis. IEEE Trans. Netw. Sci. Eng. 2020, 1. [Google Scholar] [CrossRef]
- Qin, S.; Sihao, Z.; Xiaowei, C. An Indoor Localization System Using Wirelessly Synchronized TDOA. Nav. Pos. T. 2018, 5, 57–62. [Google Scholar]
- 802.1AS-2020. IEEE Standard for Local and Metropolitan Area Networks—Timing and Synchronization for Time-Sensitive Applications; IEEE Computer Society: Washington, DC, USA, 2020. [Google Scholar]
- Yin, Y. Research on high precision wireless time synchronizations technology for TC-OFDM. J. Beijing Univ. Posts Telecommun. 2019, 8, 4–85. [Google Scholar]
- Hao, W.; Zhongliang, D.; Jun, M.; Buyun, J. Wireless synchronization technology based on ultra-wideband wireless communication technology. In Proceedings of the 10th China Satellite Navigation Annual Conference, Beijing, China, 22 May 2019; pp. 1–5. [Google Scholar]
- Zhao, T.; Zhao, K.; Yu, C.; Dong, D.; Zheng, Z.; Zhang, Y. Application of Differential Time Synchronization in Indoor Positioning. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar]
- Amar, A.; Leus, G. A reference-free time difference of arrival source localization using a passive sensor array. In Proceedings of the 2010 IEEE Sensor Array and Multichannel Signal Processing Workshop, Jerusalem, Israel, 4–7 October 2010; pp. 157–160. [Google Scholar] [CrossRef]
- Schau, H.C.; Robinson, A.Z. Passive source location employing intersecting spherical surfaces from time-of-arrival difference. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1223–1225. [Google Scholar] [CrossRef]
- Smith, J.; Abel, J. The spherical interpolation method of source localization. IEEE J. Ocean. Eng. 1987, 12, 246–252. [Google Scholar] [CrossRef]
- Chan, Y.; Ho, K. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef] [Green Version]
- Noroozi, A.; Sebt, M.A. Weighted least squares target location estimation in multi-transmitter multi-receiver passive radar using bistatic range measurements. IET Radar Sonar Navig. 2016, 10, 1088–1097. [Google Scholar] [CrossRef]
- Li, X.; Wang, Q.; Liu, Y.; Tsiftsis, T.A.; Ding, Z.; Nallanathan, A. UAV-Aided Multi-Way NOMA Networks With Residual Hardware Impairments. IEEE Wirel. Commun. Lett. 2020, 9, 1538–1542. [Google Scholar] [CrossRef]
- Yan, J.; Tiberius, C.; Bellusci, G.; Janssen, G. Feasibility of Gauss-Newton method for indoor positioning. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 660–670. [Google Scholar] [CrossRef]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geod. 2016, 90, 255–262. [Google Scholar] [CrossRef]
- Wei, X.; Wang, L.; Wan, J. A New Localization Technique Based on Network TDOA Information. In Proceedings of the 2006 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 127–130. [Google Scholar]
- Pierrot, J.-B. Time Synchronization in UWB Ad Hoc Networks Using TOA estimation. In Proceedings of the 2005 IEEE International Conference on Ultra-Wideband, Zurich, Switzerland, 5–8 September 2006; pp. 458–463. [Google Scholar]
- Dezhang, C.; Hao, T.; Jida, W. Research of TDOA cooperative location algorithm based on Chan and Tylor. Comput. Sci. 2011, 38, 406–407, 411. [Google Scholar]
- Giancarlo, F.; Andreas, M.; Linda, S. Anchor Placement. Handbook of Position Location—Theory, Practice and Advances, 2nd ed.; Zekavat, S.A., Michal, B.R., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2019; pp. 435–455. ISBN 978-1-119-43458-0. [Google Scholar]
- Jinyu, X.; Wei, W.; Zhongliang, Z. A new TDOA algorithm based on Taylor series expansion in cellular networks. J. Com. 2004, 25, 144–150. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Max (cm) | Min (cm) | Mean (cm) | Standard Deviation (cm) |
|---|---|---|---|---|
| Chan–Taylor | 88.7 | 35.7 | 54.8 | 9.3 |
| WLS-Taylor | 78.8 | 34.9 | 55.2 | 9.2 |
| Algorithm | Max (cm) | Min (cm) | Mean (cm) | Standard Deviation (cm) |
|---|---|---|---|---|
| WLS-Taylor without error calibration | 78.8 | 34.9 | 55.2 | 9.2 |
| WLS-Taylor with error calibration | 30.7 | 0.1 | 12.6 | 7.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Zhao, T.; Zheng, Z.; Yu, C.; Ma, D.; Rabie, K.; Kharel, R. Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things. Sensors 2020, 20, 6513. https://doi.org/10.3390/s20226513
Zhao K, Zhao T, Zheng Z, Yu C, Ma D, Rabie K, Kharel R. Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things. Sensors. 2020; 20(22):6513. https://doi.org/10.3390/s20226513
Chicago/Turabian StyleZhao, Kun, Tiantian Zhao, Zhengqi Zheng, Chao Yu, Difeng Ma, Khaled Rabie, and Rupak Kharel. 2020. "Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things" Sensors 20, no. 22: 6513. https://doi.org/10.3390/s20226513
APA StyleZhao, K., Zhao, T., Zheng, Z., Yu, C., Ma, D., Rabie, K., & Kharel, R. (2020). Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things. Sensors, 20(22), 6513. https://doi.org/10.3390/s20226513