UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation


Abstract
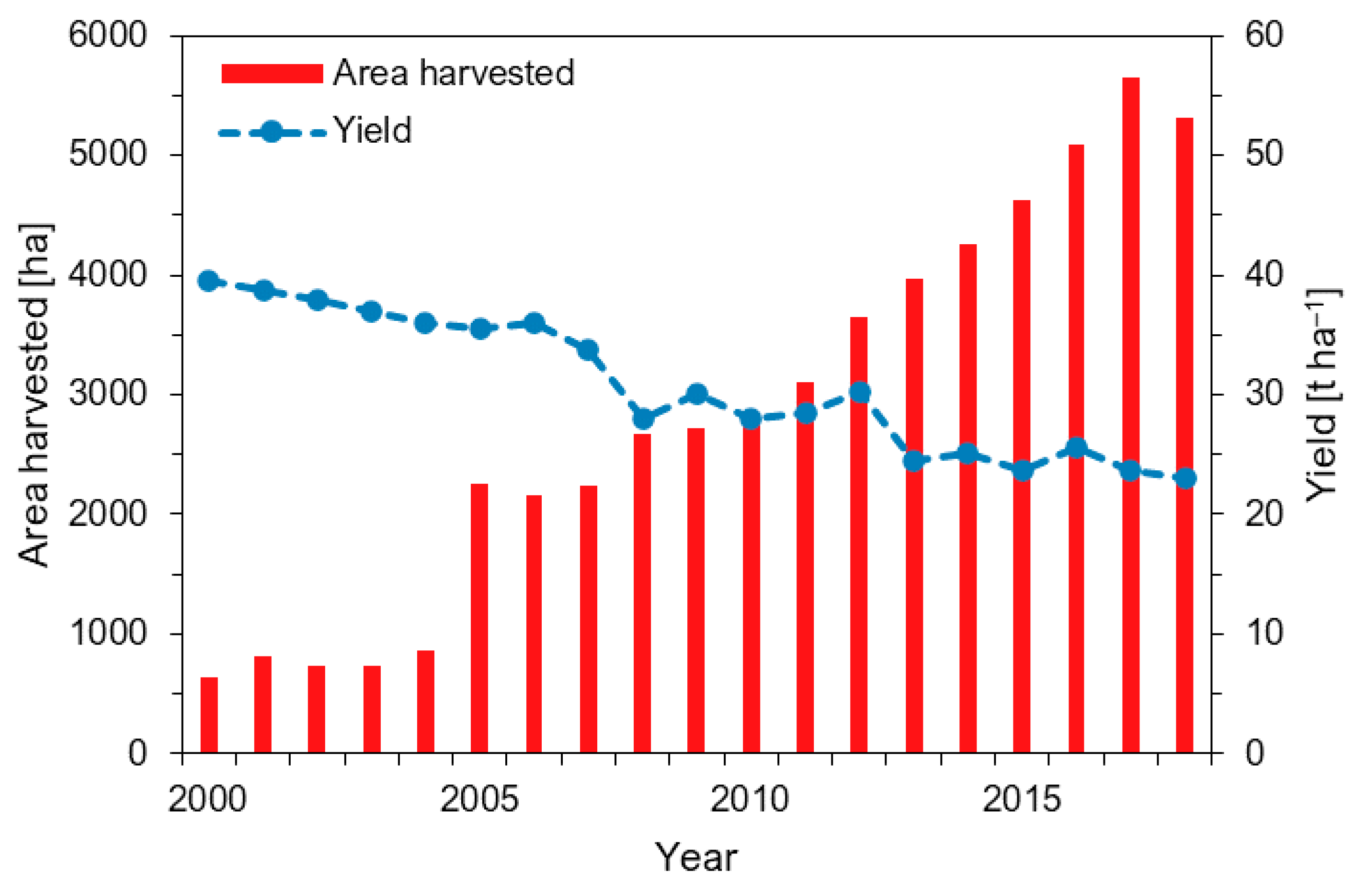
:1. Introduction
2. Materials and Methods
2.1. Field Management
2.2. UAV Image Data
2.3. Field Sampling
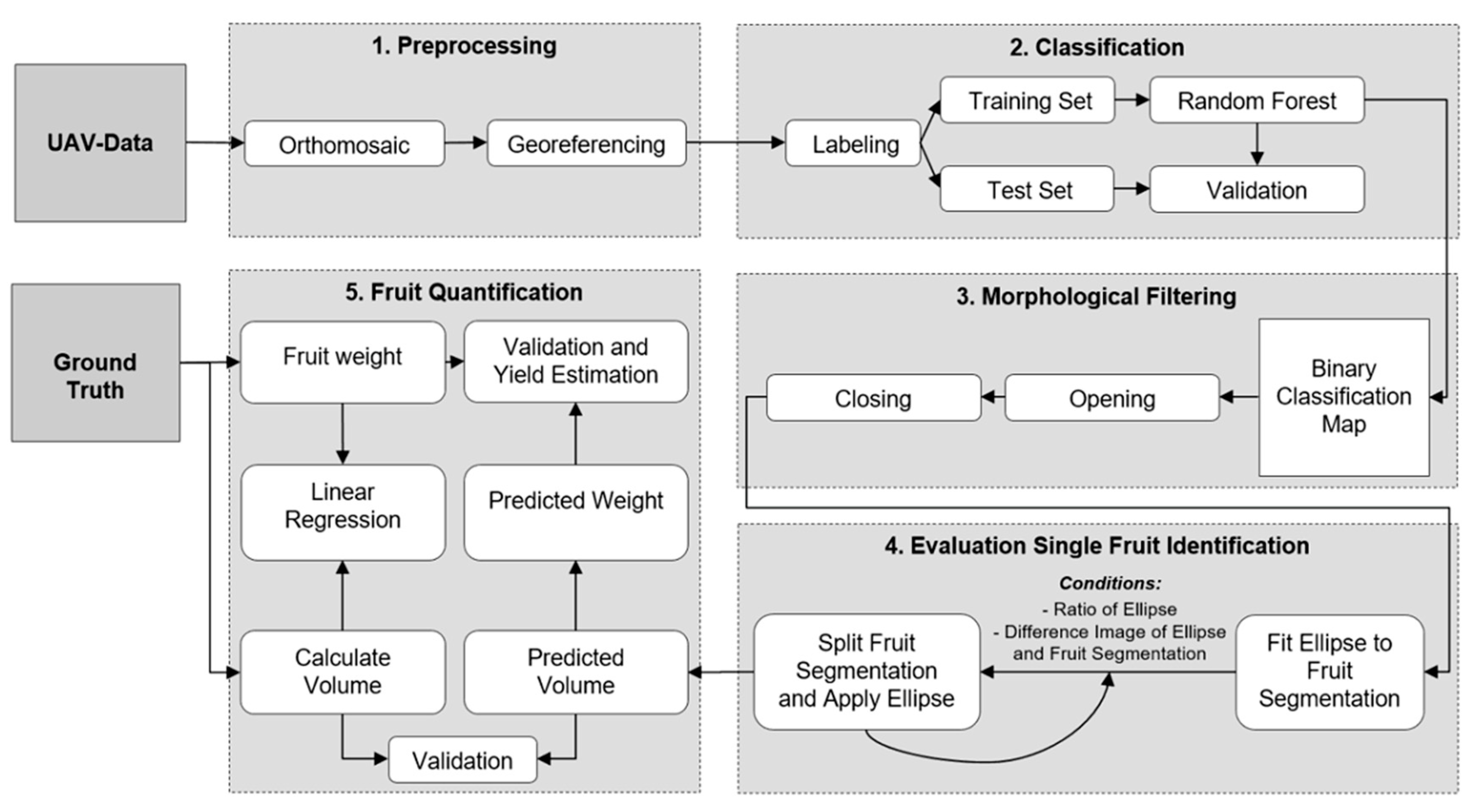
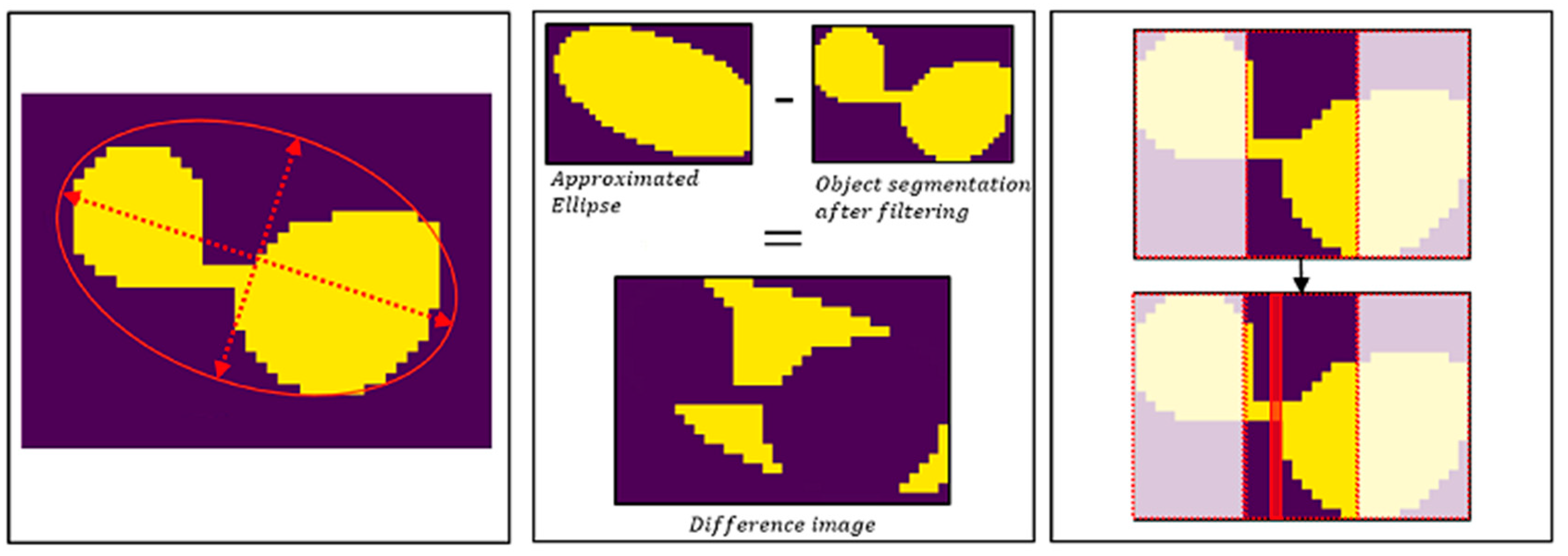
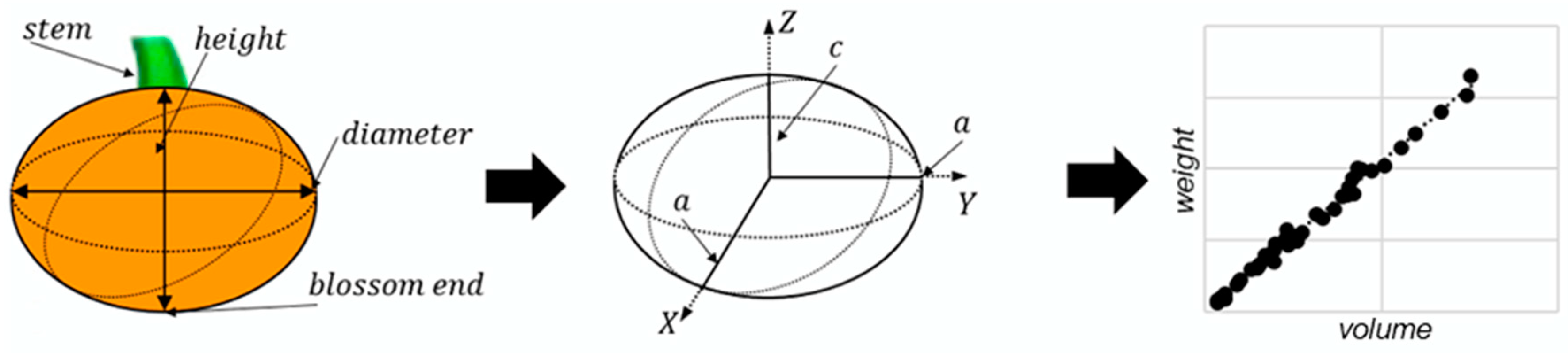
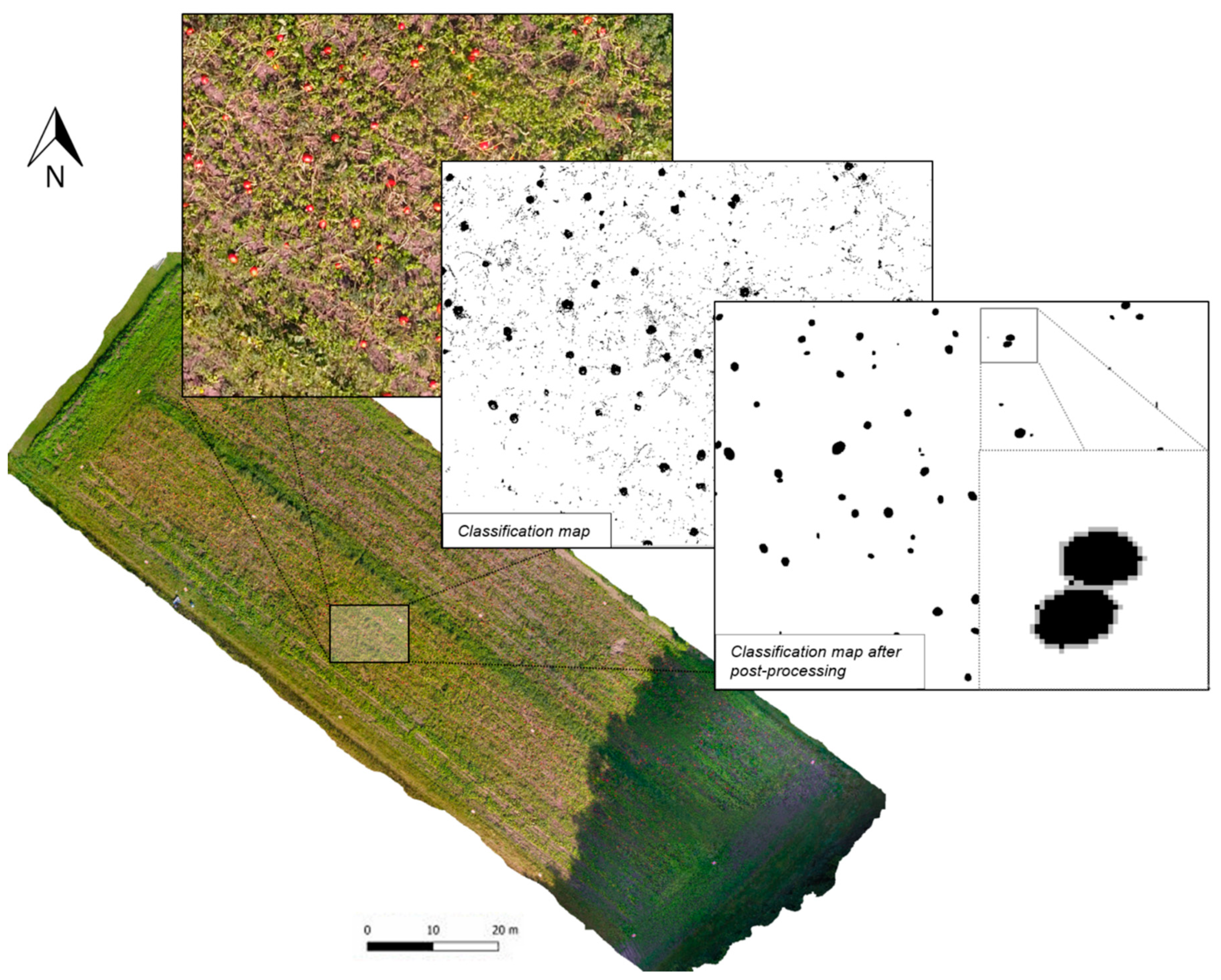
2.4. Methodology for Fruit Identification
3. Results
3.1. Descriptive Statistics of Field Data
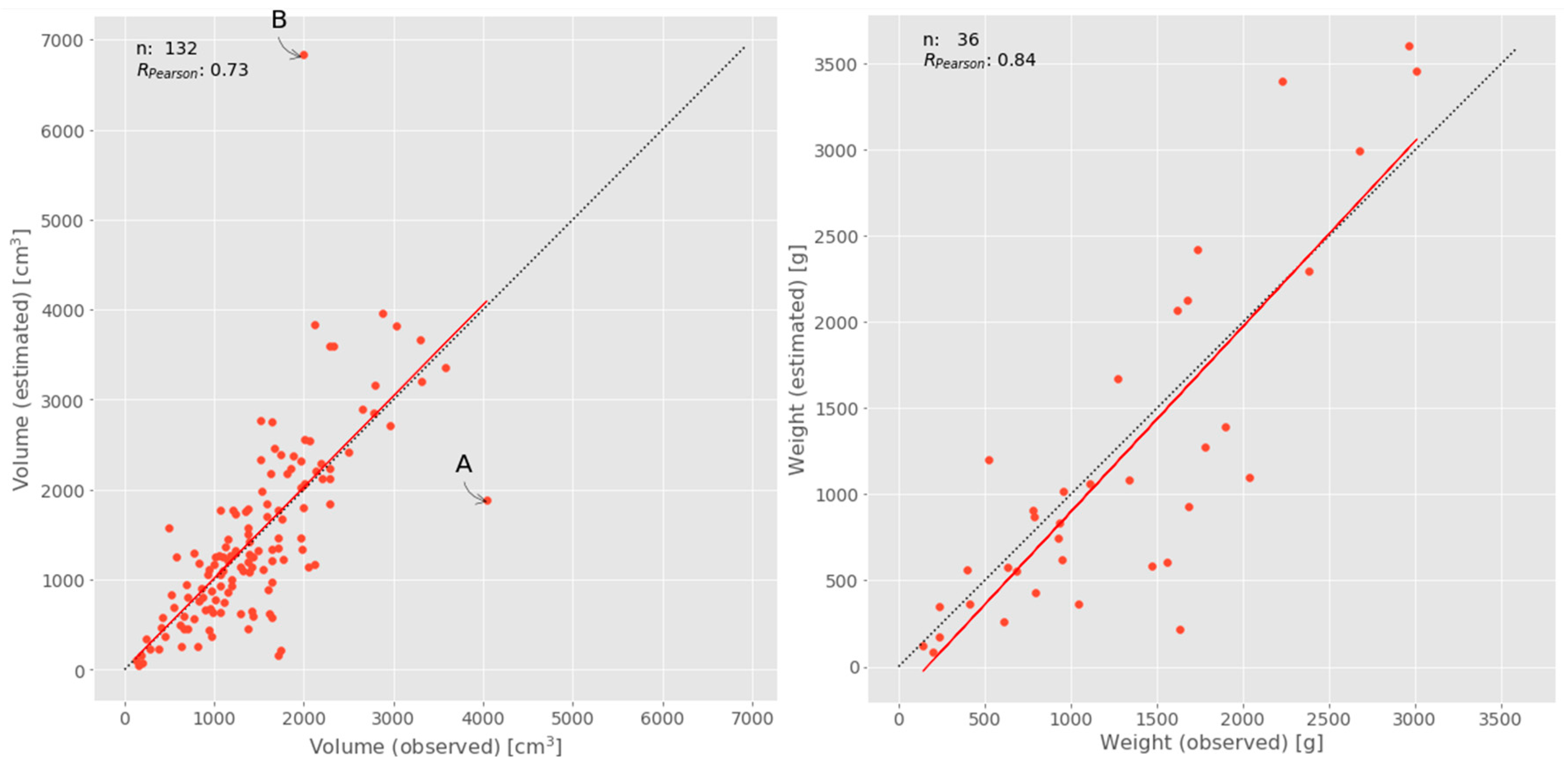
3.2. Accuracy Assessment of Random Forest Classification
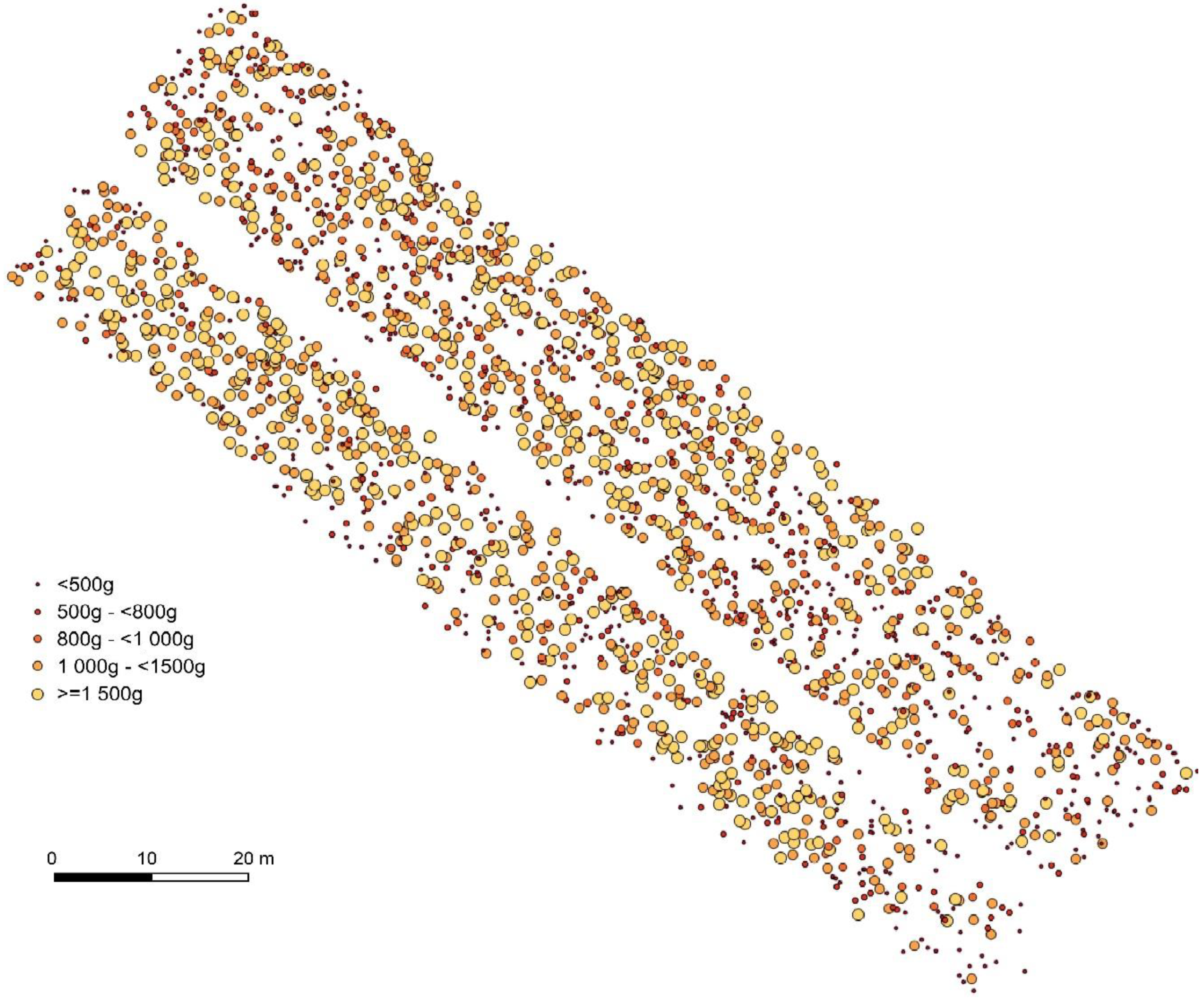
3.3. Mapping of the Estimated Hookaido Pumpkins
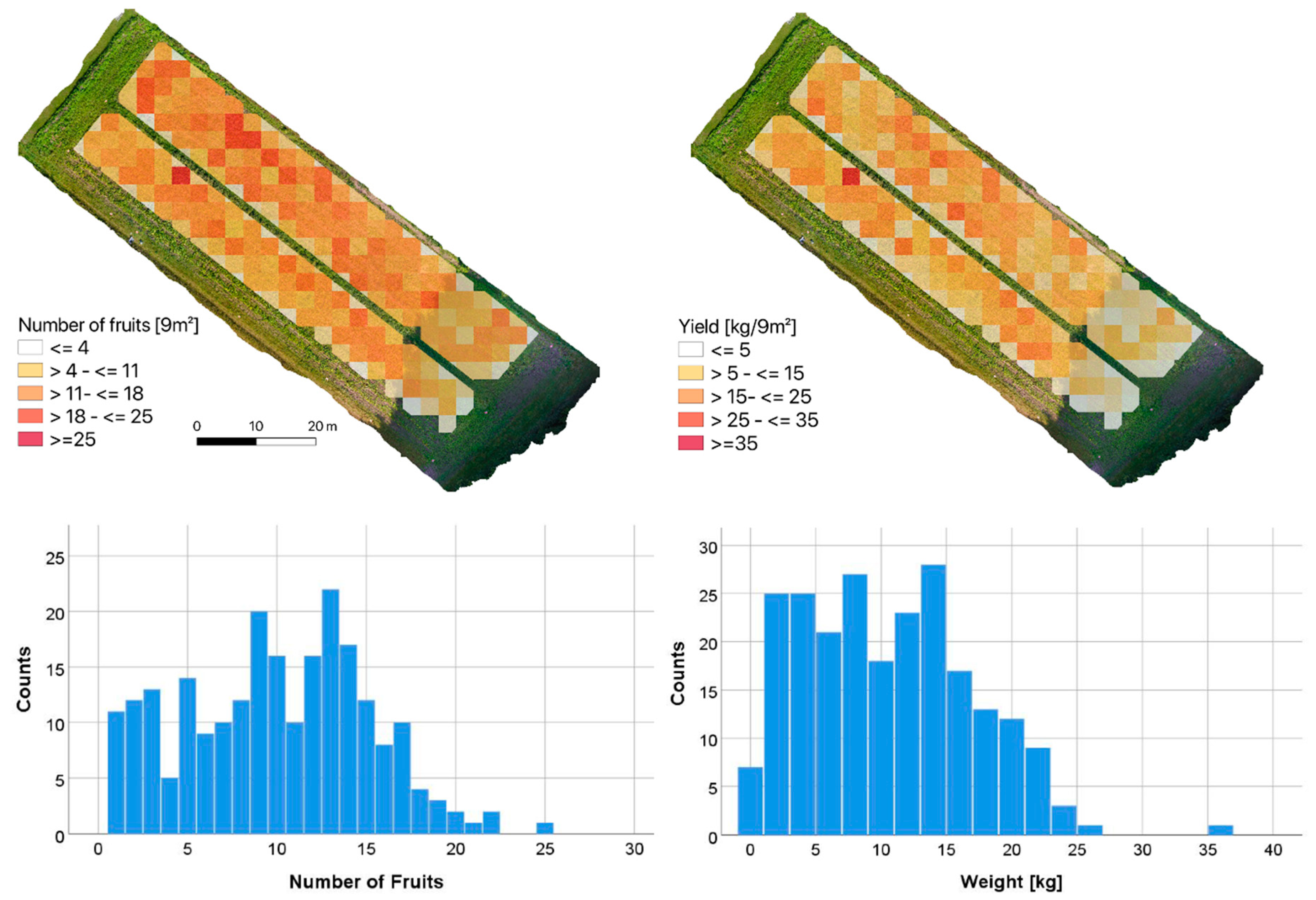
3.4. Quantification of Hokkaido Fruits
4. Discussion
4.1. Methodologic Performance
4.2. Agronomic Consequences
4.3. Future Perspectives
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAOSTAT. Food and Agriculture Organization of the United Nations. 2008. Available online: http://www.fao.org/faostat/en/#data/QC (accessed on 17 October 2020).
- Salehi, B.; Sharifi-Rad, J.; Capanoglu, E.; Adrar, N.; Catalkaya, G.; Shaheen, S.; Jaffer, M.; Giri, L.; Suyal, R.; Jugran, A.K.; et al. Cucurbita Plants: From Farm to Industry. Appl. Sci. 2019, 9, 3387. [Google Scholar] [CrossRef] [Green Version]
- Paris, H.S. Genetic Resources of Pumpkins and Squash, Cucurbita spp. Genet. Genom. Pineapple 2016, 111–154. [Google Scholar]
- Ferriol, M.; Picó, B. Pumpkin and Winter Squash. In Handbook of Plantbreeding—Vegetables I; Prohens, J., Nuez, F., Eds.; Springer: New York, NY, USA, 2008; pp. 317–349. ISBN 978-0-387-72291-7. [Google Scholar]
- García-Martínez, H.; Flores-Magdaleno, H.; Khalil-Gardezi, A.; Ascencio-Hernández, R.; Tijerina-Chávez, L.; Vázquez-Peña, M.A.; Mancilla-Villa, O.R. Digital Count of Corn Plants Using Images Taken by Unmanned Aerial Vehicles and Cross Correlation of Templates. Agronomy 2020, 10, 469. [Google Scholar] [CrossRef] [Green Version]
- Gnädinger, F.; Schmidhalter, U. Digital Counts of Maize Plants by Unmanned Aerial Vehicles (UAVs). Remote Sens. 2017, 9, 544. [Google Scholar] [CrossRef] [Green Version]
- Reinecke, M.; Prinsloo, T. The influence of drone monitoring on crop health and harvest size. In Proceedings of the 2017 1st International Conference on Next Generation Computing Applications (NextComp), Mauritius, Mauritius, 19–21 July 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 5–10. [Google Scholar]
- Dehkordi, R.H.; Burgeon, V.; Fouché, J.; Gomez, E.P.; Cornélis, J.-T.; Nguyen, F.; Denis, A.; Meersmans, J. Using UAV Collected RGB and Multispectral Images to Evaluate Winter Wheat Performance Across a Site Characterized by Century-Old Biochar Patches in Belgium. Remote Sens. 2020, 12, 2504. [Google Scholar] [CrossRef]
- Furukawa, F.; Maruyama, K.; Saito, Y.K.; Kaneko, M. Corn Height Estimation Using UAV for Yield Prediction and Crop Monitoring. In Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Springer Science and Business Media LLC.: Berli/Heidelberg, Germany, 2019; pp. 51–69. [Google Scholar]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Li-Ping, J.; Xu, X. The estimation of crop emergence in potatoes by UAV RGB imagery. Plant Methods 2019, 15, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.; Lee, W.-S.; Gan, H.; Peres, N.A.; Fraisse, C.W.; Zhang, Y.; He, Y. Strawberry Yield Prediction Based on a Deep Neural Network Using High-Resolution Aerial Orthoimages. Remote. Sens. 2019, 11, 1584. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.W.; Shivakumar, S.S.; Dcunha, S.; Das, J.; Okon, E.; Qu, C.; Taylor, C.J.; Kumar, V. Counting Apples and Oranges With Deep Learning: A Data-Driven Approach. IEEE Robot. Autom. Lett. 2017, 2, 781–788. [Google Scholar] [CrossRef]
- Apolo-Apolo, O.; Martínez-Guanter, J.; Egea, G.; Raja, P.; Ruiz, M.P. Deep learning techniques for estimation of the yield and size of citrus fruits using a UAV. Eur. J. Agron. 2020, 115, 126030. [Google Scholar] [CrossRef]
- Kalantar, A.; Edan, Y.; Gur, A.; Klapp, I. A deep learning system for single and overall weight estimation of melons using unmanned aerial vehicle images. Comput. Electron. Agric. 2020, 178, 105748. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, K.; Guo, W.; Yoshioka, Y.; Ninomiya, S. On Plant Detection of Intact Tomato Fruits Using Image Analysis and Machine Learning Methods. Sensors 2014, 14, 12191–12206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2014. In International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; IUSS Working Group WRB: Rome, Italy, 2014; ISBN 9789251083697. [Google Scholar]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef] [Green Version]
- DWD Deutscher Wetterdienst. Available online: https://www.dwd.de (accessed on 1 August 2018).
- Meier, U. Growth Stages of Mono-and Dicotyledonous Plants, 2nd ed.; Federal Biological Research Centre for Agriculture and Forestry: Quedlinburg, Germany, 2001. [Google Scholar]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăgu, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Lawrence, R.L.; Wood, S.D.; Sheley, R.L. Mapping invasive plants using hyperspectral imagery and Breiman Cutler classifications (randomForest). Remote Sens. Environ. 2006, 100, 356–362. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification And Regression Trees; Informa UK Limited: London, UK, 2017. [Google Scholar]
- Bovik, A.C. Basic Binary Image Processing. In The Essential Guide to Image Processing; Elsevier BV: Amsterdam, The Netherlands, 2009; pp. 69–96. [Google Scholar]
- Srisha, R.; Khan, A. Morphological Operations for Image Processing: Understanding and its Applications. NCVSComs-13 Conf. Proc. 2013, 17–19. [Google Scholar]
- Suzuki, S.; Abe, K. Topological structural analysis of digitized binary images by border following. Comput. Vision Graph. Image Process. 1985, 29, 396. [Google Scholar] [CrossRef]
- Fitz-Gibbon, A.; Fisher, R. A Buyer’s Guide to Conic Fitting. In Procedings of the British Machine Vision Conference 1995, Birmingham, UK, 11–14 September 1995; British Machine Vision Association and Society for Pattern Recognition: Manchester, UK, 1995; p. 51. [Google Scholar]
- Reinisch, S.; Sauer, H. Sortenvergleich Hokkaido-Kürbisse 2015. Versuche im Dtsch. Gartenbau 2015, 1–6. [Google Scholar]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Panday, U.S.; Pratihast, A.K.; Aryal, J.; Kayastha, R.B. A Review on Drone-Based Data Solutions for Cereal Crops. Drones 2020, 4, 41. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Astor, T.; Dayananda, S.; Nidamanuri, R.R.; Nautiyal, S.; Hanumaiah, N.; Gebauer, J.; Wachendorf, M. Estimation of Vegetable Crop Parameter by Multi-temporal UAV-Borne Images. Remote Sens. 2018, 10, 805. [Google Scholar] [CrossRef] [Green Version]
- Banko, G. A review of assessing the accuracy of and of methods including remote sensing data in forest inventory. Int. Inst. Appl. Syst. Anal. Interim Rep. 1998, 1–36. [Google Scholar]
- Zawbaa, H.M.; Hazman, M.; Abbass, M.; Hassanien, A.E. Automatic fruit classification using random forest algorithm. In Proceedings of the 2014 14th International Conference on Hybrid Intelligent Systems, Kuwait City, Kuwait, 14–16 December 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2014; pp. 164–168. [Google Scholar]
- Bu, R.; Xiong, J.; Chen, S.; Zheng, Z.; Guo, W.; Yang, Z.; Lin, X. A shadow detection and removal method for fruit recognition in natural environments. Precis. Agric. 2020, 21, 782–801. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, K.; Liu, H.; Yang, L.; Zhang, D. Real-Time Visual Localization of the Picking Points for a Ridge-Planting Strawberry Harvesting Robot. IEEE Access 2020, 8, 116556–116568. [Google Scholar] [CrossRef]
- Hirthe, G.; Heinze, C. Auswirkung unterschiedlicher Standweiten auf den Ertrag von Hokkaido-Kürbis im Ökologischen Anbau. Landesforschungsan. Landwirtsch. Fisch. M-V 2006, 1–5. [Google Scholar]
- Loy, J.B. Breeding squash and pumpkins. In Genetics, Genomics and Breeding of Cucurbits; Wang, Y.-H., Behera, T., Kole, C., Eds.; CRC Press: Boca Raton, FL, USA, 2012; pp. 93–139. [Google Scholar]
- Connor, D.J.; Loomis, R.S.; Cassman, K.G. Crop Ecology: Productivity and Management in Agricultural Systems; Cambridge University Press: Cambridge, UK, 2011; ISBN 9780511974199. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | DAP | Management |
|---|---|---|
| 30 March | −48 | Tillage: Primary soil cultivation by moldboard plough (25 cm depth) |
| 15 May | −2 | Fertilization: 60 kg N ha−1, 60 kg P ha−1, 60 kg K ha−1 |
| 16 May | −1 | Tillage: Seedbed preparation by cultivator with crumbler roller |
| 17 May | 0 | Planting: Cultivar Uchiki Kuri, 10.000 plants ha−1, 2 m row width |
| 24 May | 7 | Weed regulation: once a week, 5 times Between rows by harrow, in row manually |
| 7 June | 21 | Fertilization: 15 kg N ha−1, 15 kg P ha−1, 15 kg K ha−1 |
| 24 September | 130 | Harvest |
| n | Minimum | Maximum | Mean | SD | |
|---|---|---|---|---|---|
| Height (cm) | 140 | 6.5 | 19.0 | 12.4 | 2.6 |
| Diameter (cm) | 140 | 6.0 | 21.0 | 13.8 | 3.0 |
| Weight (g) | 40 | 142.0 | 3011.0 | 1187.0 | 776.2 |
| Weight Class (kg) | Classification Data | Percentage |
|---|---|---|
| <0.5 * | 628 | 27.5 |
| 0.5–0.8 | 351 | 15.3 |
| 0.8–1.0 | 204 | 8.9 |
| 1.0–1.5 | 535 | 23.4 |
| ≥1.5 | 568 | 24.8 |
| Sum | 2286 | 99.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wittstruck, L.; Kühling, I.; Trautz, D.; Kohlbrecher, M.; Jarmer, T. UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation. Sensors 2021, 21, 118. https://doi.org/10.3390/s21010118
Wittstruck L, Kühling I, Trautz D, Kohlbrecher M, Jarmer T. UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation. Sensors. 2021; 21(1):118. https://doi.org/10.3390/s21010118
Chicago/Turabian StyleWittstruck, Lucas, Insa Kühling, Dieter Trautz, Maik Kohlbrecher, and Thomas Jarmer. 2021. "UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation" Sensors 21, no. 1: 118. https://doi.org/10.3390/s21010118
APA StyleWittstruck, L., Kühling, I., Trautz, D., Kohlbrecher, M., & Jarmer, T. (2021). UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation. Sensors, 21(1), 118. https://doi.org/10.3390/s21010118