
Continuous Tracking of Foot Strike Pattern during a Maximal 800-Meter Run


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experimental Setup
2.3. Instrumentation
2.4. Experimental Protocol
2.5. Data Processing
- Foot Strike Angle (FSA): Calculated as the difference in foot angle at foot contact and the angle when the foot was stationary on the ground, with a larger (more positive) value indicating a more RF strike pattern (Figure 2). The foot angle was measured using integrated angular velocity data (from gyroscope) from the axis aligned with foot sagittal plane. Previous results showed a strong correlation between this measure and 2D videography measure of foot strike angles (r = 0.868) [15]. Average (FSAAVE) and standard deviation (FSASD) measures for FSA were calculated for each 100 m interval as well as an average over the entire race. Step-by-step data processing information is provided as Supplementary Materials (see Supplementary Materials—Document S1).
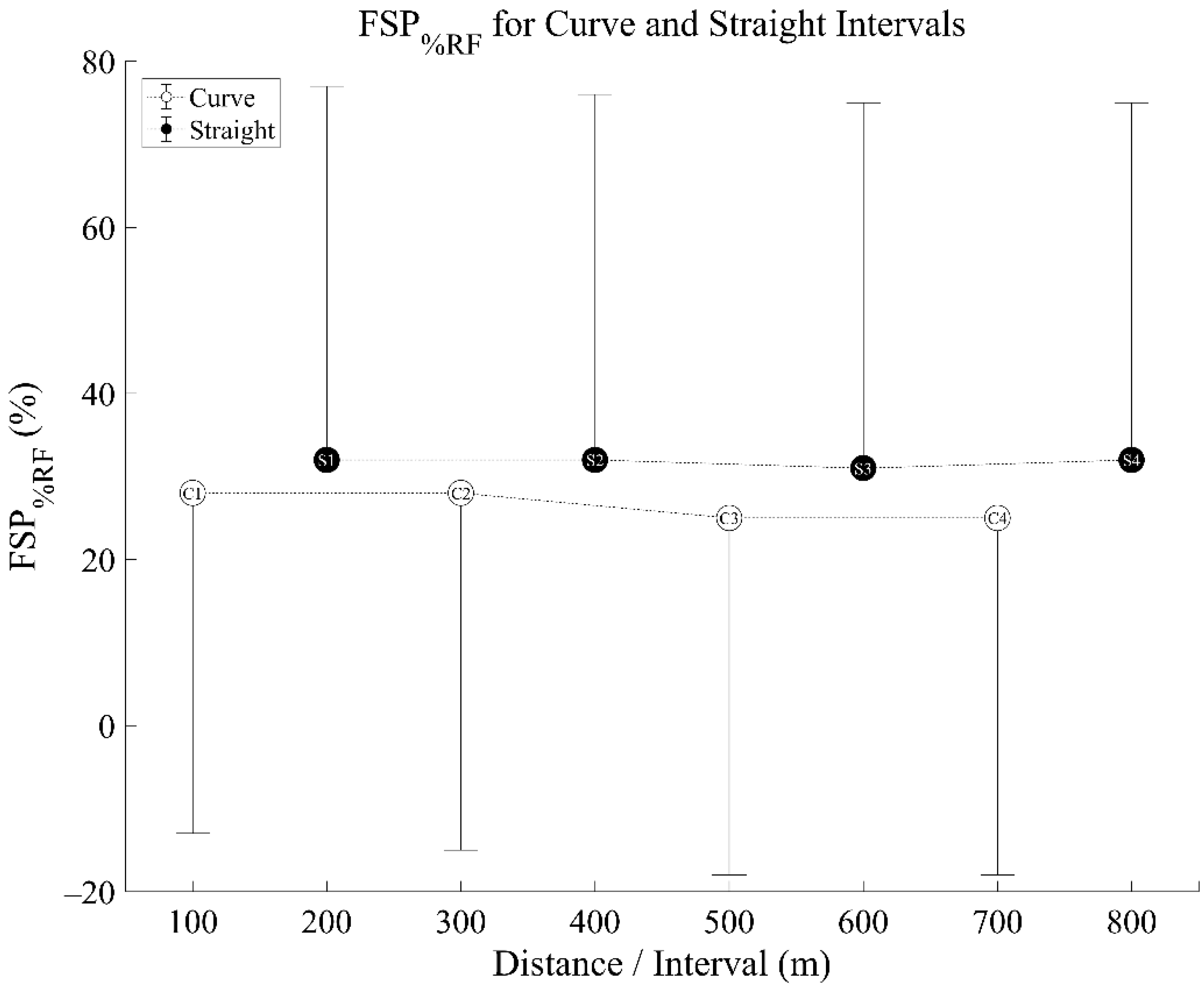
- Foot Strike Pattern (FSP): A binary classifier indicating rearfoot strike (RF) or non-rearfoot strike (NRF). This binary classifier used an average of 15 ms angular velocity data for the foot, starting at foot contact, to determine type of foot strike. A positive value indicated the foot rotating in one direction, and a negative value indicated the foot rotating in the opposite direction. For our purpose, positive FSP indicated a RF strike and negative indicated a NRF strike (Figure 2). Previous work indicated that this method could accurately distinguish RF from NRF with a 92.2% success rate [15]. FSP measures were used to calculate the percentage of foot strikes that were RF (FSP%RF) for each 100 m interval as well as over the entire race. Step-by-step data processing information is provided as Supplementary Materials (see Supplementary Materials—Document S1).
2.6. Statistical Analysis
3. Results
3.1. Performance
3.2. Foot Strike Angle (FSA)
3.3. Foot Strike Pattern Classification (FSP)
4. Discussion
4.1. Performance
4.2. Foot Strike Angle
4.3. Foot Strike Pattern
4.4. Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Filipas, L.; Ballati, E.N.; Bonato, M.; La Torre, A.; Piacentini, M.F. Elite Male and Female 800-m Runners’ Display of Different Pacing Strategies during Season-Best Performances. Int. J. Sports Physiol. Perform. 2018, 13, 1344–1348. [Google Scholar] [CrossRef]
- Hanley, B.; Stellingwerff, T.; Hettinga, F.J. Successful Pacing Profiles of Olympic and IAAF World Championship Middle-Distance Runners Across Qualifying Rounds and Finals. Int. J. Sports Physiol. Perform. 2019, 14, 894–901. [Google Scholar] [CrossRef] [Green Version]
- Sandford, G.N.; Pearson, S.; Allen, S.V.; Malcata, R.M.; Kilding, A.E.; Ross, A.; Laursen, P.B. Tactical Behaviors in Men’s 800-m Olympic and World-Championship Medalists: A Changing of the Guard. Int. J. Sports Physiol. Perform. 2017, 13, 246–249. [Google Scholar] [CrossRef]
- Sandford, G.N.; Stellingwerff, T. “Question Your Categories”: The Misunderstood Complexity of Middle-Distance Running Profiles with Implications for Research Methods and Application. Front. Sports Act. Living 2019, 1, 28. [Google Scholar] [CrossRef] [Green Version]
- Bates, B.T.; Osternig, L.R.; James, S.L. Fatigue Effects in Running. J. Mot. Behav. 1977, 9, 203–207. [Google Scholar] [CrossRef]
- Elliot, B.; Roberts, A.D. A Biomechanical Evaluation of the Role of Fatigue in Middle-Distance Running. Can. J. Appl. Sports Sci. 1980, 5, 203–207. [Google Scholar]
- Girard, O.; Millet, G.; Micallef, J.-P. Mechanical Alterations during 800-m Self-Paced Track Running. Int. J. Sports Med. 2017, 38, 314–321. [Google Scholar] [CrossRef]
- Hayes, P.; Caplan, N. Foot Strike Patterns and Ground Contact Times during High-Calibre Middle-Distance Races. J. Sports Sci. 2012, 30, 1275–1283. [Google Scholar] [CrossRef] [PubMed]
- Di Michele, R.; Merni, F. The Concurrent Effects of Strike Pattern and Ground-Contact Time on Running Economy. J. Sci. Med. Sport 2014, 17, 414–418. [Google Scholar] [CrossRef] [PubMed]
- Kasmer, M.E.; Wren, J.J.; Hoffman, M.D. Foot Strike Pattern and Gait Changes during a 161-Km Ultramarathon. J. Strength Cond. Res. 2014, 28, 1343–1350. [Google Scholar] [CrossRef] [PubMed]
- Ogueta-Alday, A.; RodríGuez-Marroyo, J.A.; GarcíA-LóPez, J. Rearfoot Striking Runners Are More Economical Than Midfoot Strikers. Med. Sci. Sports Exerc. 2014, 46, 580–585. [Google Scholar] [CrossRef]
- Perl, D.P.; Daoud, A.I.; Lieberman, D.E. Effects of Footwear and Strike Type on Running Economy. Med. Sci. Sports Exerc. 2012, 44, 1335–1343. [Google Scholar] [CrossRef] [Green Version]
- Hasegawa, H.; Yamauchi, T.; Kraemer, W.J. Foot Strike Patterns of Runners at the 15-Km Point during an Elite-Level Half Marathon. J. Strength Cond. Res. 2007, 21, 888–893. [Google Scholar] [CrossRef]
- Gaudel, J.; Oriwol, D.; Maiwald, C.; Dannemann, A. Classification of Foot Strike Pattern Using Single Accelerometers. Footwear Sci. 2015, 7, S132–S133. [Google Scholar] [CrossRef]
- van Werkhoven, H.; Farina, K.A.; Langley, M.H. Using A Soft Conformable Foot Sensor to Measure Changes in Foot Strike Angle During Running. Sports 2019, 7, 184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahn, A.N.; Brayton, C.; Bhatia, T.; Martin, P. Muscle Activity and Kinematics of Forefoot and Rearfoot Strike Runners. J. Sport Health Sci. 2014, 3, 102–112. [Google Scholar] [CrossRef]
- Cavanagh, P.R.; Lafortune, M.A. Ground Reaction Forces in Distance Running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef]
- Landreneau, L.L.; Watts, K.; Heitzman, J.E.; Childers, W.L. Lower Limb Muscle Activity during Forefoot and Rearfoot Strike Running Techniques. Int. J. Sports Phys. Ther. 2014, 9, 888. [Google Scholar] [PubMed]
- Adrigo, L.P.; Lafortuna, C.; Minetti, A.E.; Mognoni, P.; Saibene, F. Metabolic and Mechanical Aspects of Foot Landing Type, Forefoot and Rearfoot Strike, in Human Running. Acta Physiol. Scand. 1995, 155, 17–22. [Google Scholar] [CrossRef]
- Novacheck, T.F. The Biomechanics of Running. Gait Posture 1998, 7, 77–95. [Google Scholar] [CrossRef]
- Bovalino, S.P.; Cunningham, N.J.; Zordan, R.D.; Harkin, S.M.; Thies, H.H.G.; Graham, C.J.; Kingsley, M.I.C. Change in Foot Strike Patterns and Performance in Recreational Runners during a Road Race: A Cross-Sectional Study. J. Sci. Med. Sport 2020, 23, 621–624. [Google Scholar] [CrossRef]
- Larson, P.; Higgins, E.; Kaminski, J.; Decker, T.; Preble, J.; Lyons, D.; McIntyre, K.; Normile, A. Foot Strike Patterns of Recreational and Sub-Elite Runners in a Long-Distance Road Race. J. Sports Sci. 2011, 29, 1665–1673. [Google Scholar] [CrossRef]
- Kulmala, J.-P.; Avela, J.; Pasanen, K.; Parkkari, J. Forefoot Strikers Exhibit Lower Running-Induced Knee Loading than Rearfoot Strikers. Med. Sci. Sports Exerc. 2013, 45, 2306–2313. [Google Scholar] [CrossRef]
- Pohl, M.B.; Buckley, J.G. Changes in Foot and Shank Coupling Due to Alterations in Foot Strike Pattern during Running. Clin. Biomech. 2008, 23, 334–341. [Google Scholar] [CrossRef]
- Sinclair, J.; Cole, T.; Richards, J. The Influence of Barefoot and Shod Running on Triceps Surae Muscle Strain Characteristics. Foot Ankle Online J. 2016. [Google Scholar] [CrossRef]
- Jewell, C.; Boyer, K.A.; Hamill, J. Do Footfall Patterns in Forefoot Runners Change over an Exhaustive Run? J. Sports Sci. 2017, 35, 74–80. [Google Scholar] [CrossRef] [PubMed]
- García-Pinillos, F.; Molina-Molina, A.; Párraga-Montilla, J.A.; Latorre-Román, P.A. Kinematic Alterations after Two High-Intensity Intermittent Training Protocols in Endurance Runners. J. Sport Health Sci. 2019, 8, 442–449. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hanley, B.; Bissas, A.; Merlino, S.; Gruber, A.H. Most Marathon Runners at the 2017 IAAF World Championships Were Rearfoot Strikers, and Most Did Not Change Footstrike Pattern. J. Biomech. 2019, 92, 54–60. [Google Scholar] [CrossRef] [PubMed]
- Hanon, C.; Thomas, C. Effects of Optimal Pacing Strategies for 400-, 800-, and 1500-m Races on the [Vdot]O2 Response. J. Sports Sci. 2011, 29, 905–912. [Google Scholar] [CrossRef]
- Clermont, C.A.; Benson, L.C.; Edwards, W.B.; Hettinga, B.A.; Ferber, R. New Considerations for Wearable Technology Data: Changes in Running Biomechanics during a Marathon. J. Appl. Biomech. 2019, 35, 401–409. [Google Scholar] [CrossRef]
- Giandolini, M.; Poupard, T.; Gimenez, P.; Horvais, N.; Millet, G.Y.; Morin, J.-B.; Samozino, P. A Simple Field Method to Identify Foot Strike Pattern during Running. J. Biomech. 2014, 47, 1588–1593. [Google Scholar] [CrossRef]
- Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J.J. Continuous Three Dimensional Analysis of Running Mechanics during a Marathon by Means of Inertial Magnetic Measurement Units to Objectify Changes in Running Mechanics. J. Biomech. 2016, 49, 3362–3367. [Google Scholar] [CrossRef]
- Reenalda, J.; Maartens, E.; Buurke, J.H.; Gruber, A.H. Kinematics and Shock Attenuation during a Prolonged Run on the Athletic Track as Measured with Inertial Magnetic Measurement Units. Gait Posture 2019, 68, 155–160. [Google Scholar] [CrossRef]
- Riebe, D.; Franklin, B.A.; Thompson, P.D.; Garber, C.E.; Whitfield, G.P.; Magal, M.; Pescatello, L.S. Updating ACSM’s Recommendations for Exercise Preparticipation Health Screening. Med. Sci. Sports Exerc. 2015, 47, 2473–2479. [Google Scholar] [CrossRef] [Green Version]
- McGinnis, R.S.; Patel, S.; Silva, I.; Mahadevan, N.; DiCristofaro, S.; Jortberg, E.; Ceruolo, M.; Aranyosi, A.J. Skin mounted accelerometer system for measuring knee range of motion. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 5298–5302. [Google Scholar]
- Moon, Y.; McGinnis, R.S.; Seagers, K.; Motl, R.W.; Sheth, N.; Wright, J.A.; Ghaffari, R.; Sosnoff, J.J. Monitoring Gait in Multiple Sclerosis with Novel Wearable Motion Sensors. PLoS ONE 2017, 12, e0171346. [Google Scholar] [CrossRef]
- Churchill, S.M.; Salo, A.I.; Trewartha, G. The effect of the bend on technique and performance during maximal speed sprinting. In Proceedings of the ISBS-Conference Proceedings Archive, Porto, Portugal, 27 June–1 July 2011; Volume 1. [Google Scholar]
- Hamill, J.; Murphy, M.; Sussman, D. The Effects of Track Turns on Lower Extremity Function. Int. J. Sport Biomech. 1987, 3, 276–286. [Google Scholar] [CrossRef]
- Alt, T.; Heinrich, K.; Funken, J.; Potthast, W. Lower Extremity Kinematics of Athletics Curve Sprinting. J. Sports Sci. 2015, 33, 552–560. [Google Scholar] [CrossRef]
- Dugan, S.A.; Bhat, K.P. Biomechanics and Analysis of Running Gait. Phys. Med. Rehabil. Clin. N. Am. 2005, 16, 603–621. [Google Scholar] [CrossRef] [PubMed]
- Altman, A.R.; Davis, I.S. A Kinematic Method for Footstrike Pattern Detection in Barefoot and Shod Runners. Gait Posture 2012, 35, 298–300. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nigg, B.M.; Bahlsen, H.A.; Luethi, S.M.; Stokes, S. The Influence of Running Velocity and Midsole Hardness on External Impact Forces in Heel-Toe Running. J. Biomech. 1987, 10, 951–959. [Google Scholar] [CrossRef]
- Caekenberghe, I.V.; Segers, V.; Aerts, P.; Willems, P.; De Clercq, D. Joint Kinematics and Kinetics of Overground Accelerated Running versus Running on an Accelerated Treadmill. J. R. Soc. Interface 2013, 10, 20130222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elliot, B.; Ackland, T. Biomechanical Effects of Fatigue on 10,000 Meter Running Technique. Res. Q. Exerc. Sport 1981, 52, 160–166. [Google Scholar] [CrossRef] [PubMed]
- García-Pinillos, F.; Soto-Hermoso, V.M.; Latorre-Román, P.Á. Do Running Kinematic Characteristics Change over a Typical HIIT for Endurance Runners? J. Strength Cond. Res. 2016, 30, 2907–2917. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Females (14) | Males (7) | |
|---|---|---|
| Age (years) | 24.43 ± 3.92 | 24.71 ± 5.06 |
| Height (cm) | 166.83 ± 7.29 | 181.53 ± 7.48 |
| Mass (kg) | 58.49 ± 7.06 | 72.27 ± 8.53 |
| Miles per Week | 33.75 ± 18.10 | 42.14 ± 22.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farina, K.A.; Needle, A.R.; van Werkhoven, H. Continuous Tracking of Foot Strike Pattern during a Maximal 800-Meter Run. Sensors 2021, 21, 5782. https://doi.org/10.3390/s21175782
Farina KA, Needle AR, van Werkhoven H. Continuous Tracking of Foot Strike Pattern during a Maximal 800-Meter Run. Sensors. 2021; 21(17):5782. https://doi.org/10.3390/s21175782
Chicago/Turabian StyleFarina, Kathryn A., Alan R. Needle, and Herman van Werkhoven. 2021. "Continuous Tracking of Foot Strike Pattern during a Maximal 800-Meter Run" Sensors 21, no. 17: 5782. https://doi.org/10.3390/s21175782