
A Novel Optimized V-VLC Receiver Sensor Design Using μGA in Automotive Applications


Abstract
:1. Introduction
1.1. Summary of the Recent Work
1.2. Motivations
1.3. Our Contributions
- To enhance vehicular VLC systems with self-aware capabilities, which would maximize the communication performances and efficiency, we present a novel optimized receiver designed for automotive applications;
- We show the circuit design of the receiver and implemented a micro genetic algorithm (i.e, meta-heuristic searching algorithm) to optimize the maximum received signal strength to ensure the best communication quality in V-VLC. Besides, our proposed algorithm can dictate the alignment of the receiver instead of measuring the signal for each angle;
- To provide a clear insight into our proposed algorithm, we analyzed the characteristics and optimization factor of the chosen GA;
- We compared and analyzed the accuracy and the efficiency of the chosen GA over the conventional genetic algorithm;
- To solve complex real-world problems, we discuss the challenges and future directions of using the evolutionary algorithm, which can provide a reference framework for future research.
2. Methods and Materials
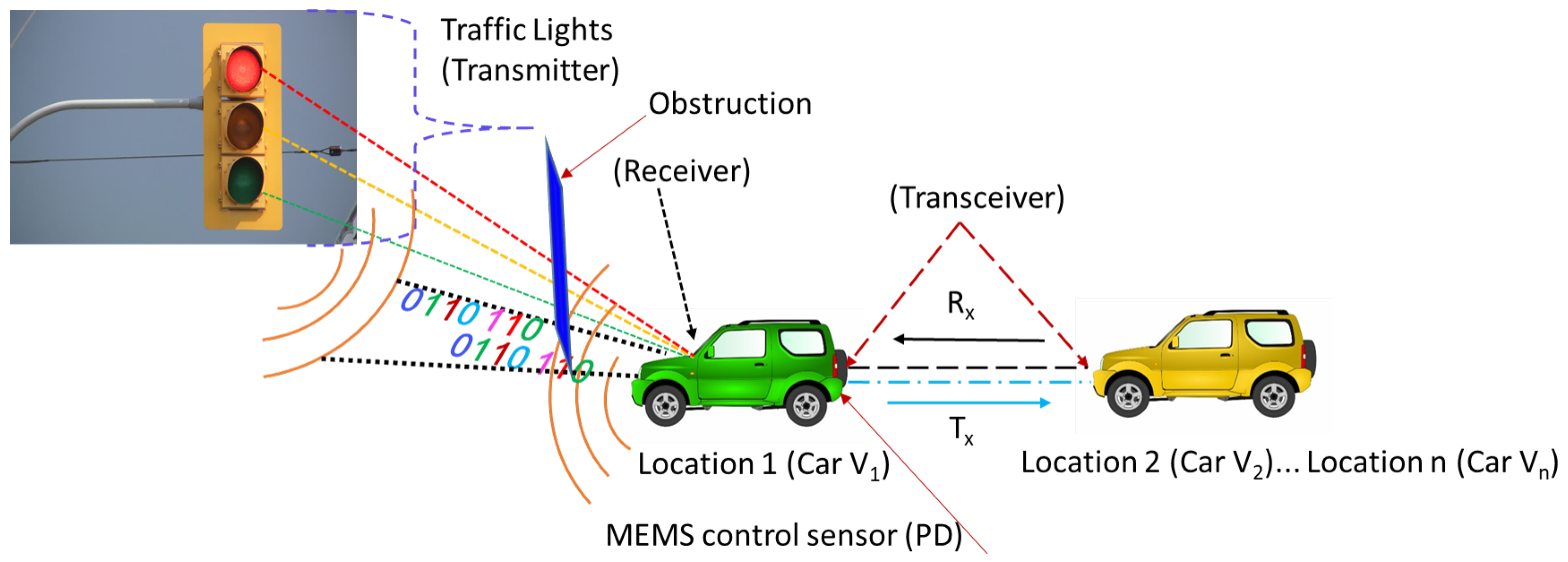
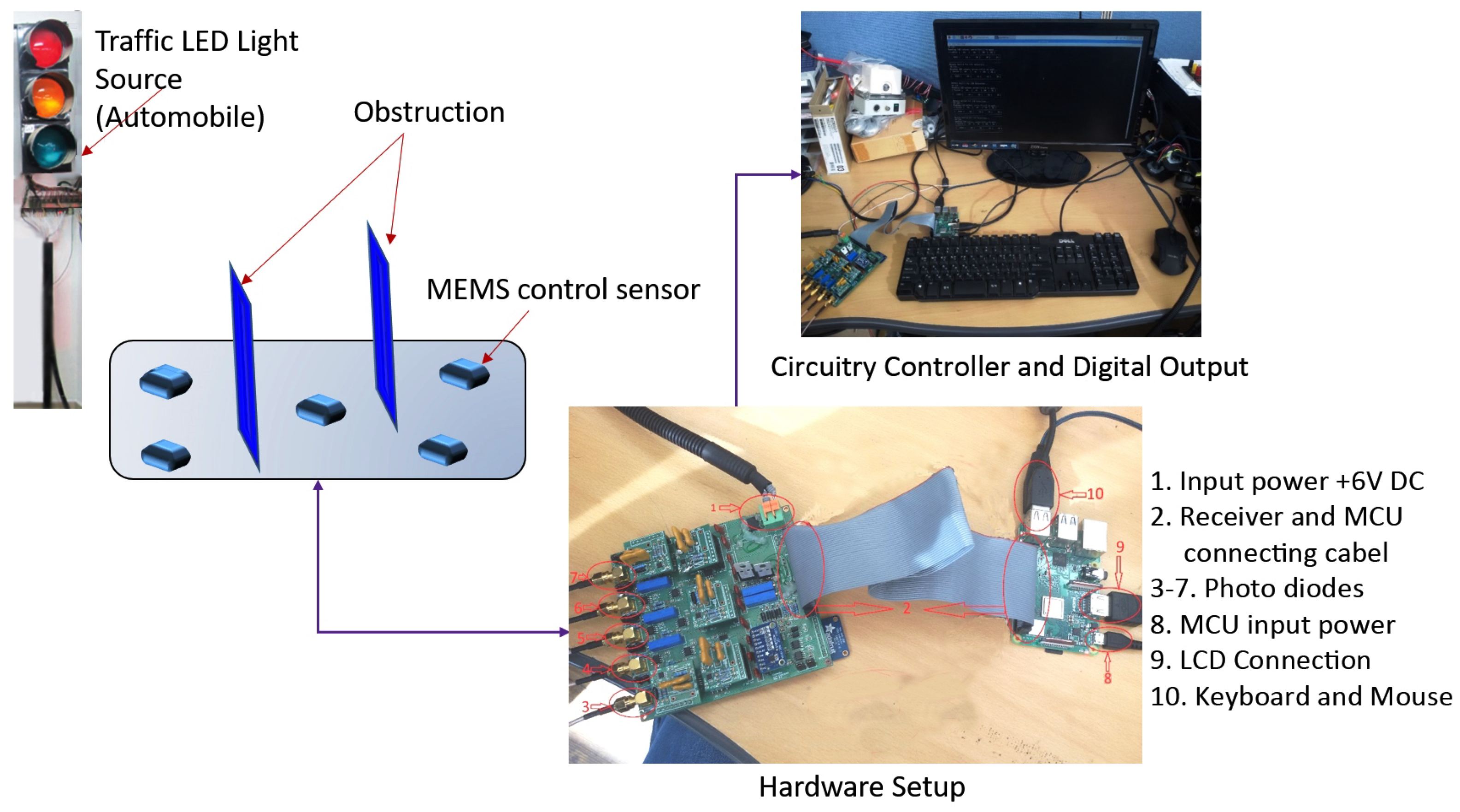
2.1. Design of the Proposed V-VLC Receiver
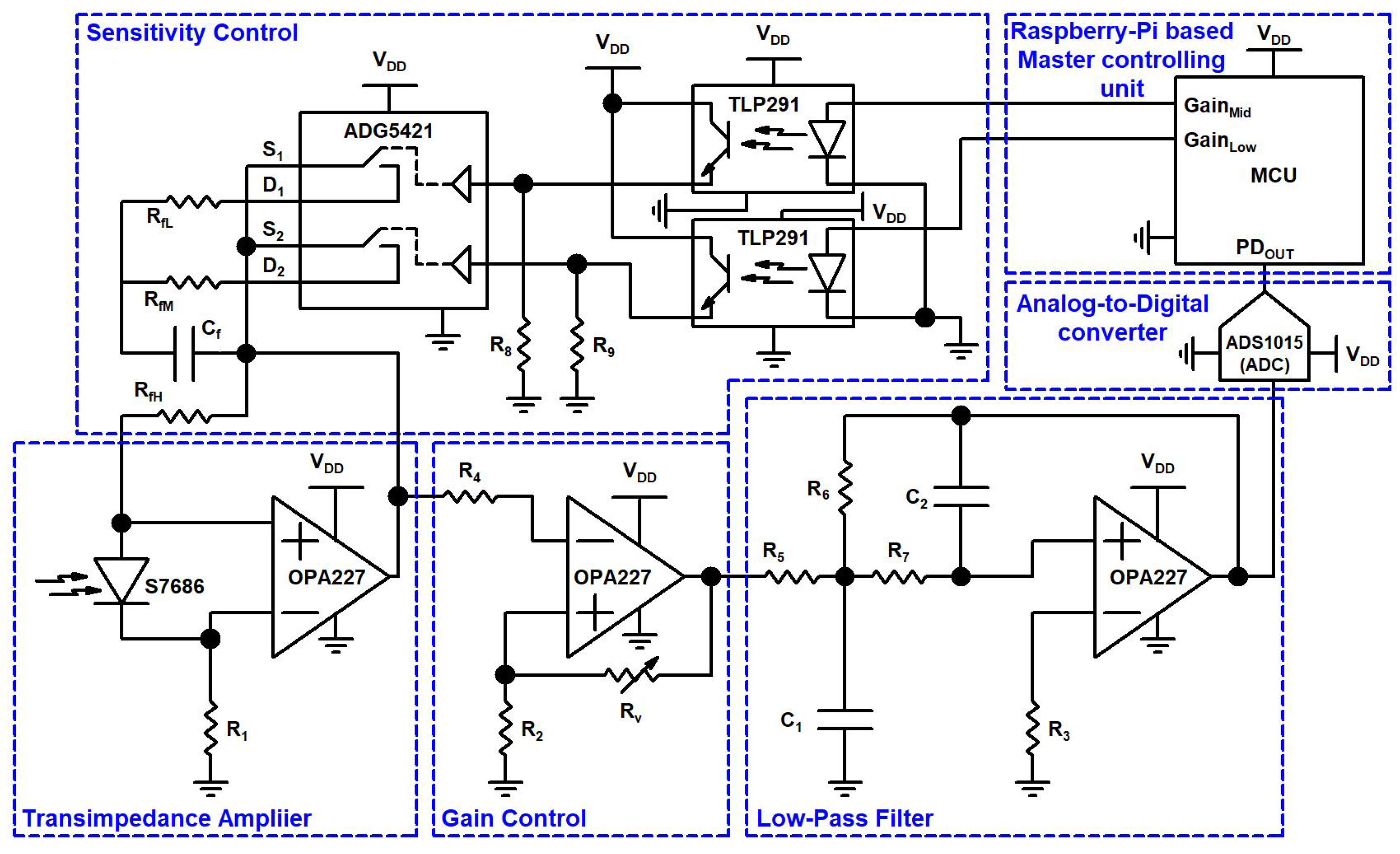
2.2. System Circuit Diagram
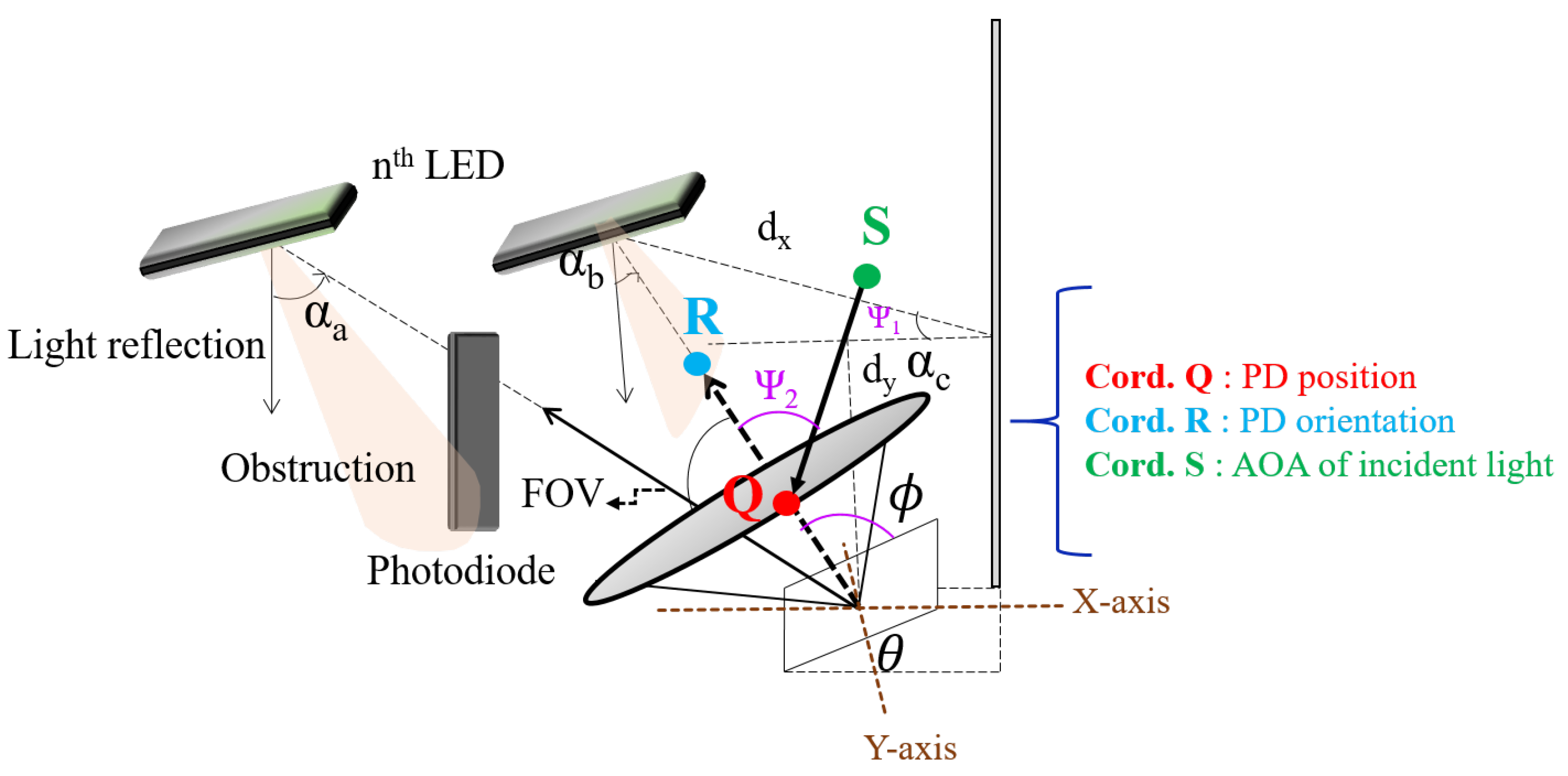
2.3. Problem Formulation
- Aref—reflector area;
- APD—the area of the PD;
- C—speed of light;
- FOV—field of view of the PD.
- = 1, when |x| ≤ 1;
- = 0, when |x| > 1.
- —transmitted optical pulse;
- —noise;
- —power delay product (PDP);
- R—responsivity.
2.4. Proposed GA and Its Advantages over the CGA
2.5. Optimization Factors
3. Results and Discussion
3.1. RSSmax for PD Location 1 (without CGA and GA Optimization)
3.1.1. RSSmax for PD Location 1 (with CGA and GA Optimization)
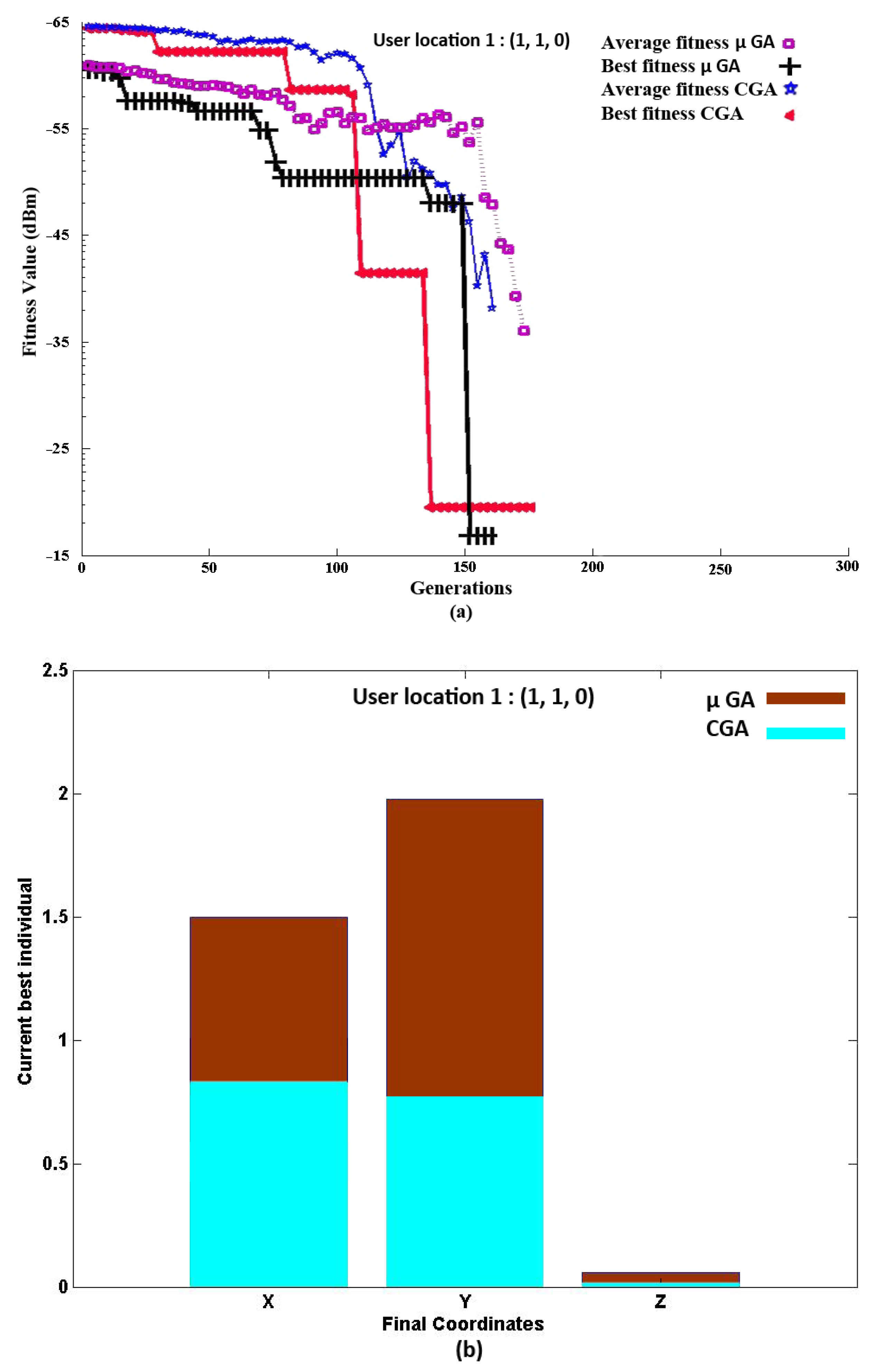
3.1.2. Finding the Alignment of the RSSmax at User Position 1
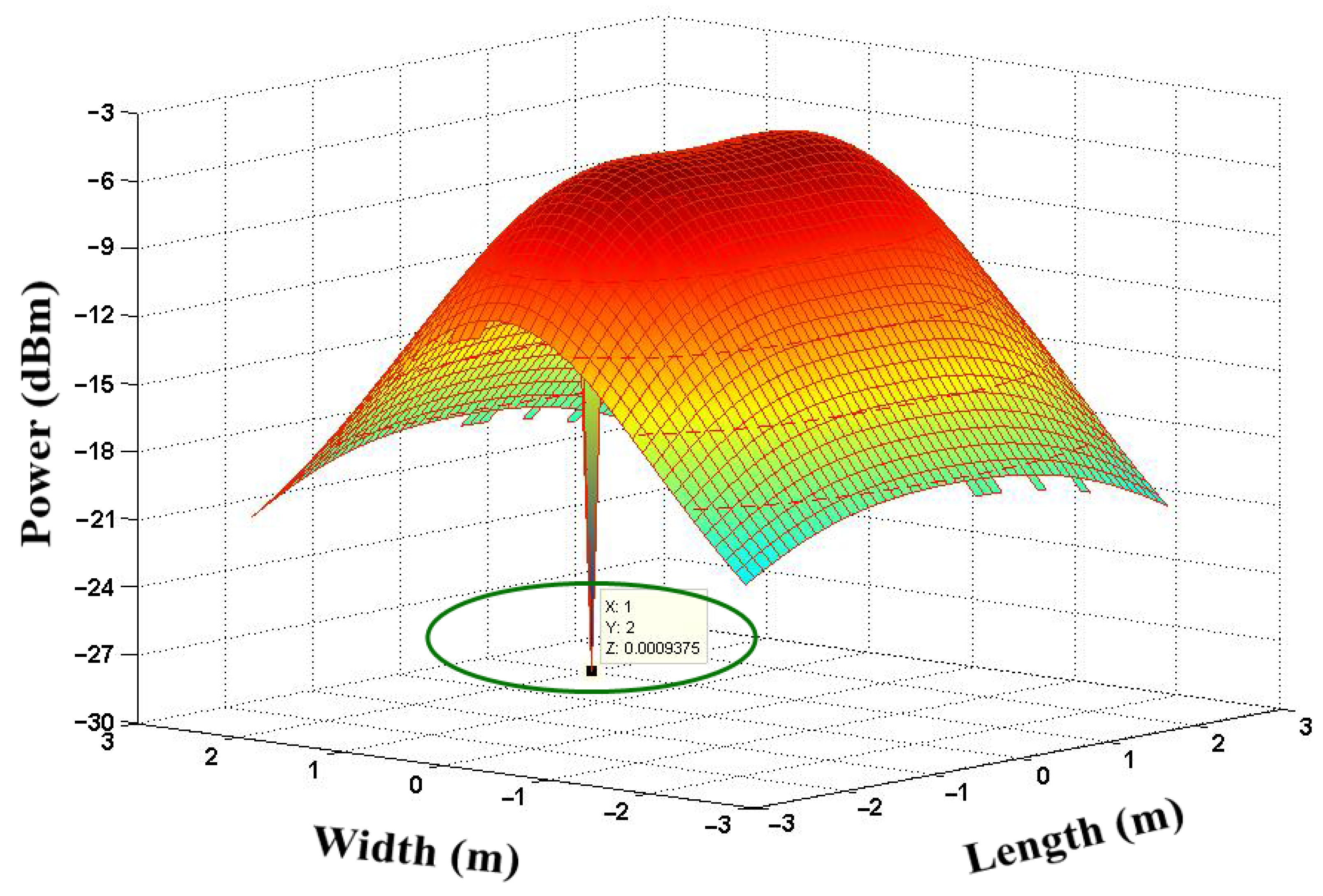
3.2. RSSmax for PD Location 2 (without CGA and GA Optimization)
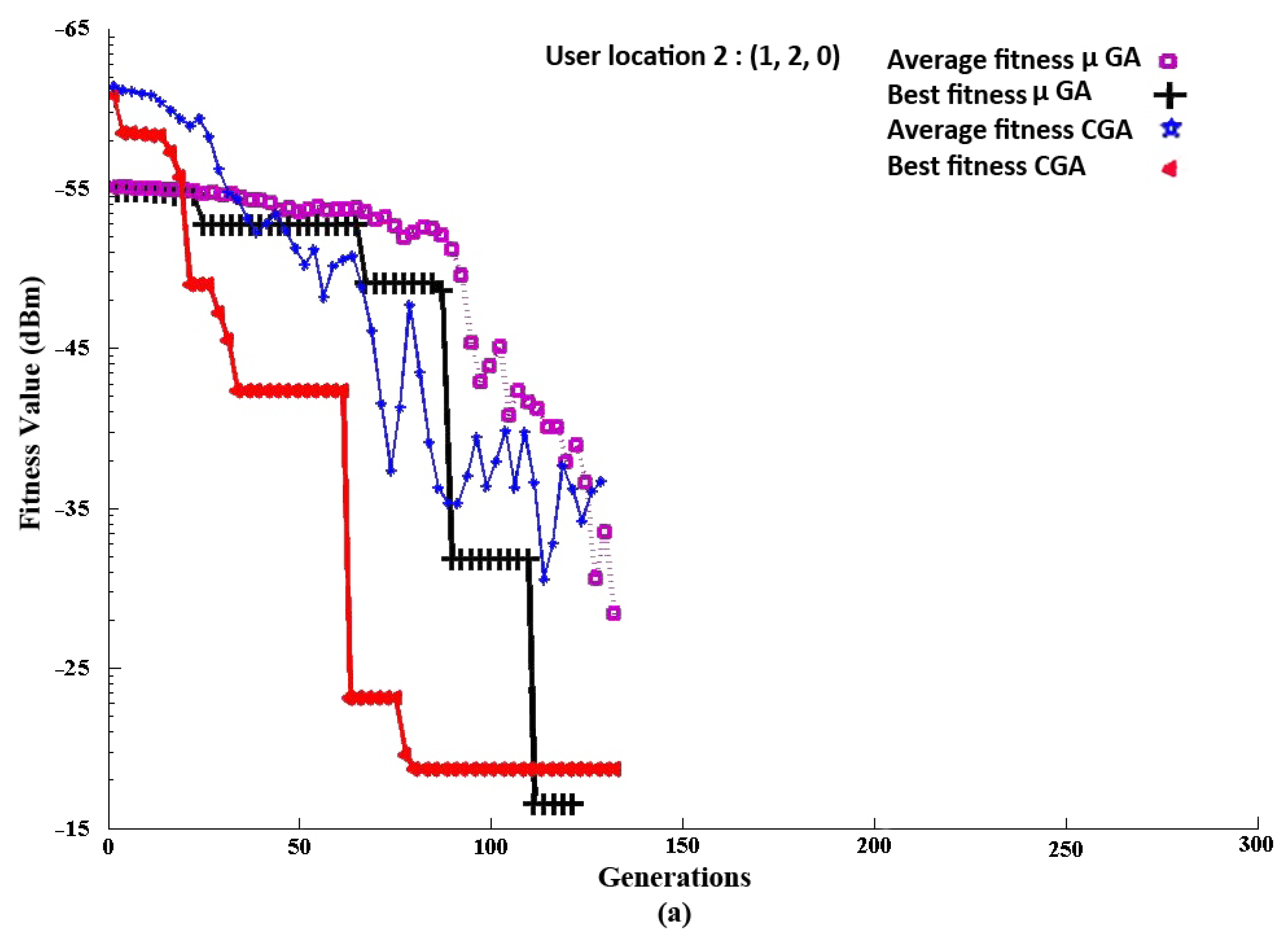
3.2.1. RSSmax for PD Location 2 (with CGA and GA Optimization)
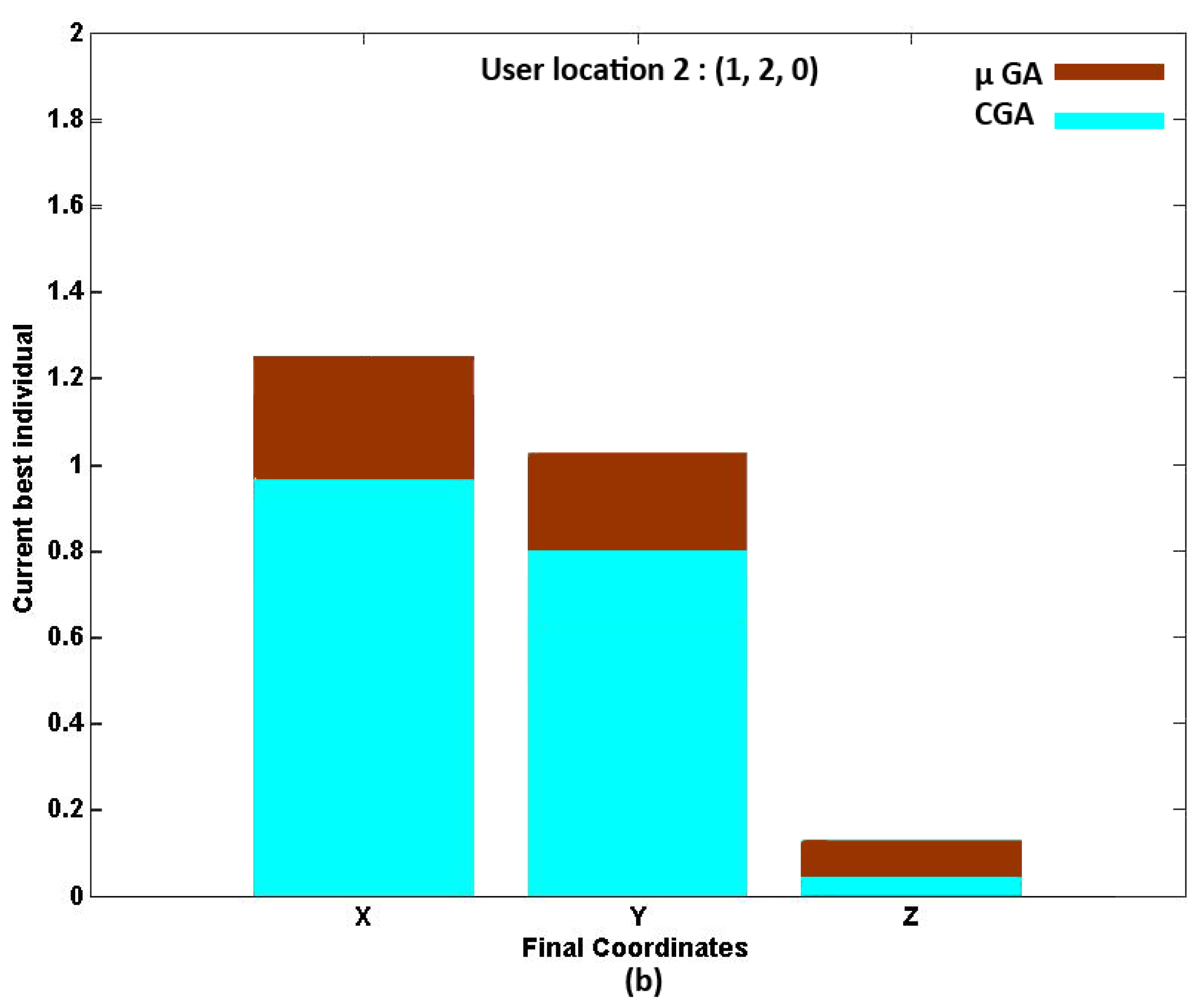
3.2.2. Finding the Alignment of the RSSmax for User Position 2
3.2.3. Benchmark Testing and Holm–Bonferroni Statistical Test
- h = 0, the first hypothesis is accepted;
- h = 1, the second hypothesis is accepted;
- Ci = (i shows the number of a compared algorithm) is calculated according to the rank score of each algorithm;
- Ri = rank score (Ri), demonstrating the degree of performance of the algorithm;
- NA = 2.
3.2.4. Authentication of the Achieved Final Coordinates
4. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. Based Indoor Visible Light Communications: State of the Art. Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Grobe, L.; Paraskevopoulos, A.; Hilt, J.; Shulz, D.; Lassak, F.; Hartlieb, F.; Kottke, C.; Jungnickel, V.; Langer, K.-D. High-speed visible light communication systems. IEEE Commun. Mag. 2013, 51, 60–66. [Google Scholar] [CrossRef]
- Rajagopal, S.; Roberts, R.D.; Lim, S.-K. IEEE 802.15.7 visible light communication: Modulation schemes and dimming support. IEEE Commun. Mag. 2012, 50, 72–82. [Google Scholar] [CrossRef]
- Niaz, M.T.; Imdad, F.; Kim, H.S. Power Consumption Efficiency Evaluation of Multi-User Full-Duplex Visible Light Communication Systems for Smart Home Technologies. Energies 2017, 10, 254. [Google Scholar] [CrossRef] [Green Version]
- Chvojka, P.; Zvanovec, S.; Haigh, P.A.; Ghassemlooy, Z. Channel Characteristics of Visible Light Communications within Dynamic Indoor Environment. J. Lightwave Technol. 2015, 33, 1719–1725. [Google Scholar] [CrossRef]
- Pathak, P.H.; Feng, X.; Hu, P.; Mohapatra, P. Visible Light Communication, Networking, and Sensing: A Survey, Potential and Challenges. Commun. Surv. Tutor. 2015, 17, 2047–2077. [Google Scholar] [CrossRef]
- Do, T.-H.; Yoo, M. Performance Analysis of Visible Light Communication Using CMOS Sensors. Sensors 2016, 16, 309. [Google Scholar] [CrossRef]
- Huynh, P.; Yoo, M. VLC-Based Positioning System for an Indoor Environment Using an Image Sensor and an Accelerometer Sensor. Sensors 2016, 16, 783. [Google Scholar] [CrossRef] [Green Version]
- Huynh, P.; Do, T.-H.; Yoo, M. A Probability-Based Algorithm Using Image Sensors to Track the LED in a Vehicle Visible Light Communication System. Sensors 2017, 17, 347. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Chen, X.; Huang, B.; Tang, D.; Chen, H. High Bandwidth Visible Light Communications Based on a Post-Equalization Circuit. IEEE Photon. Technol. Lett. 2014, 26, 119–122. [Google Scholar] [CrossRef]
- Lim, K.-H.; Lee, H.-S.; Chung, W.-Y. Multichannel Visible Light Communication with Wavelength Division for Medical Data Transmission. J. Med. Imaging Health Inform. 2015, 5, 1952–1957. [Google Scholar] [CrossRef]
- Tan, Y.Y.; Chung, W.-Y. Mobile health monitoring system through visible light communication. Biomed. Mater. Eng. 2014, 24, 3529–3538. [Google Scholar] [CrossRef] [Green Version]
- Danakis, C.; AfCGAni, M.; Povey, G.; Underwood, I.; Haas, H. Using a CMOS camera sensor for visible light communication. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1244–1248. [Google Scholar]
- Ji, P.; Tsai, H.M.; Wang, C.; Liu, F. Vehicular visible light communications with LED taillight and rolling shutter camera. In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–6. [Google Scholar]
- Nagura, T.; Yamazato, T.; Katayama, M.; Yendo, T.; Fujii, T.; Okada, H. Improved decoding methods of visible light communication system for ITS using LED array and high-speed camera. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar]
- Okada, S.; Yendo, T.; Yamazato, T.; Fujii, T.; Tanimoto, M.; Kimura, Y. On-vehicle receiver for distant visible light road-to-vehicle communication. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 1033–1038. [Google Scholar]
- Lay-Ekuakille, A.; VerCGAllo, P.; Saracino, D.; Trotta, A. Optimizing and post processing of a smart beamformer for obstacle retrieval. IEEE Sens. J. 2011, 12, 1294–1299. [Google Scholar] [CrossRef]
- Wada, M.; Yendo, T.; Fujii, T.; Tanimoto, M. Road-to-vehicle communication using LED traffic light. In Proceedings of the IEEE Proceedings. Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 601–606. [Google Scholar]
- Liu, C.B.; Sadeghi, B.; Knightly, E.W. Enabling vehicular visible light communication (V2LC) networks. In Proceedings of the Eighth ACM International Workshop on Vehicular Inter-Networking, Las Vegas, NV, USA, 23 September 2011; pp. 41–50. [Google Scholar]
- Chang, C.C.; Su, Y.J.; Kurokawa, U.; Choi, B.I. Interference rejection using filter-based sensor array in VLC systems. IEEE Sens. J. 2011, 12, 1025–1032. [Google Scholar] [CrossRef]
- Esmail, M.A.; Fathallah, H.A. Indoor visible light communication without line of sight: Investigation and performance analysis. Photonic Netw. Commun. 2015, 30, 159–166. [Google Scholar] [CrossRef]
- Dong, Z.; Cui, K.; Chen, G.; Xu, Z. Non-line-of-sight link performance study for indoor visible light communication systems. In Free-Space Laser Communications X; International Society for Optics and Photonics: San Diego, CA, USA, 2010; Volume 7814, p. 781404. [Google Scholar]
- Wang, Z.; Yu, C.; Zhong, W.D.; Chen, J. Performance improvement by tilting receiver plane in M-QAM OFDM visible light communications. Opt. Express 2011, 19, 13418–13427. [Google Scholar] [CrossRef] [PubMed]
- Delwar, T.S.; Cahyadi, W.A.; Chung, Y.H. Visible light signal strength optimization using genetic algorithm in non-line-of-sight optical wireless communication. Opt. Commun. 2018, 426, 511–518. [Google Scholar] [CrossRef]
- Delwar, T.S.; Siddique, A.; Pradhan, P.K.; Jana, A.; Ryu, J.Y. Signal power optimization technique in optical wireless link: A comparative study with CGA and PSO. Opt. Quantum Electron. 2021, 53, 1–19. [Google Scholar] [CrossRef]
- Montiel, O.; Sepúlveda, R.; Orozco-Rosas, U. Optimal path planning generation for mobile robots using parallel evolutionary artificial potential field. J. Intell. Robot. Syst. 2015, 79, 237–257. [Google Scholar] [CrossRef]
- Orozco-Rosas, U.; Montiel, O.; Sepúlveda, R. Mobile robot path planning using membrane evolutionary artificial potential field. Appl. Soft Comput. 2019, 77, 236–251. [Google Scholar] [CrossRef]
- Hare, W.; Nutini, J.; Tesfamariam, S. A survey of non-gradient optimization methods in structural engineering. Adv. Eng. Softw. 2013, 59, 19–28. [Google Scholar] [CrossRef]
- Haupt, R.L.; Haupt, S.E. Practical Genetic Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Coello, C.A.C.C.; Pulido, G.T. A micro-genetic algorithm for multiobjective optimization. International Conference on Evolutionary Multi-Criterion Optimization, Zurich, Switzerland, 7–9 March 2001; pp. 126–140. [Google Scholar]
- Mitchell, T.M. Machine Learning; WCB: Edmonton, AB, Canada, 1997. [Google Scholar]
- Lee, K.; Park, H.; Barry, J.R. Indoor channel characteristics for visible light communications. IEEE Commun. Lett. 2011, 15, 217–219. [Google Scholar] [CrossRef]
- Ding, J.P.; Ji, Y.F. Evolutionary algorithm-based optimisation of the signal-to-noise ratio for indoor visible-light communication utilising white light-emitting diode. IET Optoelectron. 2012, 6, 307–317. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, X.; Guan, W.; Chen, B.; Chen, X.; Xie, C. High-speed 3D indoor localization system based on visible light communication using differential evolution algorithm. Opt. Commun. 2018, 424, 177–189. [Google Scholar] [CrossRef]
- Slowik, A.; Kwasnicka, H. Evolutionary algorithms and their applications to engineering problems. Neural Comput. Appl. 2020, 32, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Konstantinidis, A.; Yang, K.; Zhang, Q.; Zeinalipour-Yazti, D. A multi-objective evolutionary algorithm for the deployment and power assignment problem in wireless sensor networks. Comput. Netw. 2010, 54, 960–976. [Google Scholar] [CrossRef]
- Sabino, S.; Horta, N.; Grilo, A. Centralized unmanned aerial vehicle mesh network placement scheme: A multi-objective evolutionary algorithm approach. Sensors 2018, 18, 4387. [Google Scholar] [CrossRef] [Green Version]
- Sabri, B.T.; Yaseen AL-Falahi, N.A.; Salman, I.A. Option for optimal extraction to indicate recognition of gestures using the self-improvement of the micro genetic algorithm. Int. J. Nonlinear Anal. Appl. 2021, 12, 2295–2302. [Google Scholar]
- Badalló, P.; Trias, D.; Marín, L.; Mayugo, J.A. A comparative study of genetic algorithms for the multi-objective optimization of composite stringers under compression loads. Compos. Part B Eng. 2013, 47, 130–136. [Google Scholar] [CrossRef] [Green Version]
- Yamaguchi, S.; Mai, V.V.; Thang, T.C.; Pham, A.T. Design and performance evaluation of VLC indoor positioning system using optical orthogonal codes. In Proceedings of the IEEE Fifth International Conference on Communications and Electronics (ICCE), Da Nang, Vietnam, 30 July–1 August 2014; pp. 54–59. [Google Scholar]
- Luo, P.; Zhang, M.; Zhang, X.; Cai, G.; Han, D.; Li, Q. An indoor visible light communication positioning system using dual-tone multi-frequency technique. In Proceedings of the 2nd International Workshop on Optical Wireless Communications (IWOW), Newcastle upon Tyne, UK, 21 October 2013; pp. 25–29. [Google Scholar]
- Hu, P.; Li, L.; Peng, C.; Shen, G.; Zhao, F. Pharos: Enable physical analytics through visible light based indoor localization. In Proceedings of the Twelfth ACM Workshop on Hot Topics in Networks, College Park, MD, USA, 21–22 November 2013. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Typical Value | Unit |
|---|---|---|
| Spectral response range | 480 to 660 | nm |
| Peak sensitivity wavelength | 550 | nm |
| Photo sensitivity | 0.38 | A/W |
| Short circuit current | 0.45 @ 100 lx | A |
| Dark current | 2 | pA |
| Sensitivity | Control Signal | Resistive Combination | Measuring Range (lx) | Measuring Condition (lx) | Output Voltage (V) | |||
|---|---|---|---|---|---|---|---|---|
| S1 | S2 | I-V Output | Gain Amplifier Output | LPF Output | ||||
| High | L | L | Rfh | 0–300 | 300 | −2.4 | −3.6 | 3.6 |
| Medium | L | H | Rfh // RfM | 300–1500 | 1500 | −2.4 | −3.6 | 3.6 |
| Low | H | L | RfH// RfL | 1500–7500 | 7500 | −2.4 | −3.6 | 3.6 |
| Output Parameter | Reference | Receiver | Accuracy | Objective | Processing Time |
|---|---|---|---|---|---|
| [40] | PD | 8 cm | Indoor positioning | - | |
| [41] | PD | 1.5 cm | Indoor positioning | - | |
| [42] | PD | 0.3 cm–0.7 cm | Indoor positioning | - | |
| RSS | [24] | PD | - | Achieve maximum RSS in indoor VLC | 0.21 ms (GA) |
| [25] | PD | - | Achieve maximum RSS in indoor VLC | 30 ms (PSO) | |
| This work | PD | - | Achieve maximum RSS in outdoor VLC | GA processing time 0.7 s |
| Parameters | Values |
|---|---|
| No. of LEDs | 3 |
| LED Power | 10 W |
| TX (1st) location (m) | [0, −1, 2] |
| TX (2nd) location (m) | [0, 1, 2] |
| TX (3rd) location (m) | [0, 1, −2] |
| RX Location 1/Coordinate A1 (m) | [1, 2, 0] |
| RX Location 1/Coordinate A2 (m) | [1, 1, 0] |
| Blockage location for Rx 1 (m) | [1.2, 2, 1.5] |
| Blockage location for Rx 2 (m) | [1.5, 1, 1] |
| Lambertian angle in degrees | 60∘ |
| FOV of user (PD) | c = 20180∘ |
| PD area | 0.01 × 0.01 m2 |
| Symbol | Parameters | Values |
|---|---|---|
| Npop | Population size | 50 |
| Itermax | Maximum iteration | 300 |
| Pcrossover | Probability of crossover | 0.5 |
| Pmutation | Probability of mutation | 0.05 |
| Execution time | Time (seconds) | 7.1 |
| Symbol | Parameters | Values |
|---|---|---|
| Npop | Population size | 50 |
| Itermax | Maximum iteration | 300 |
| Pcrossover | Probability of crossover | 0.25 |
| Pmutation | Probability of mutation | 0.01 |
| Execution time | Time (seconds) | 0.7 |
| Algorithm Name | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| CGA | 0.8 | 0.7 | 0.2 |
| GA | 1.5 | 1.9 | 0.4 |
| Algorithm Name | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| CGA | 0.9 | 0.8 | 0.08 |
| GA | 1.3 | 1.0 | 0.1 |
| Function | Mean Value/Standard Deviation (CGA) | Mean Value/Standard Deviation (GA) | Rank CGA | Rank GA |
|---|---|---|---|---|
| 1 | 2.43 × 100/8.45 × 10−1 | 2.12 × 10−9/3.44 × 10−9 | 6 | 1 |
| 2 | 5.10 × 10−1/1.05 × 10−1 | 1.21 × 10−2/1.11 × 10−2 | 6 | 2 |
| 3 | 1.19 × 104/3.49 × 103 | 1.03 × 103/4.83 × 102 | 6 | 3 |
| 4 | 1.12 × 101/2.80 × 101 | 1.22 × 100/1.90 × 10−1 | 6 | 1 |
| 5 | 5.04 × 102/2.44 × 102 | 1.00 × 102/5.55 × 101 | 6 | 1 |
| 6 | 3.72 × 100/1.75 × 100 | 0/0 | 4 | 1 |
| 7 | 2.04 × 10−1/4.30 × 10−2 | 1.34 × 10−2/3.91 × 10−3 | 6 | 1 |
| 8 | −1.51 × 104/4.05 × 102 | −2.19 × 104/2.00 × 10−1 | 2 | 1 |
| 9 | 4.48 × 100/2.03 × 100 | 2.18 × 10−2/2.83 × 10−2 | 2 | 1 |
| 10 | 3.52 × 10−1/1.14 × 10−1 | 7.95 × 10−3/6.05 × 10−3 | 2 | 1 |
| - | - | - | Avg.rank 4.6 Rank 2 | Avg.rank 1.3 Rank 1 |
| Algorithm Name | Score | Z | P | h | |
|---|---|---|---|---|---|
| CGA | 4.6000 | −3.2696 | 0.00051 | 0.0081 | 1 (accepted) |
| GA | 7.7034 | - | - | - | - |
| Algorithm Name | User Position 1 (m) | Signal Power Received (dBm) User 1 | User Position 2 (m) | Signal Power Received (dBm) User 2 |
|---|---|---|---|---|
| w/o CGA | X, Y, Z 1.13, 2.87, 0.08 0.25, 2.10, 0.07 0.8, 0.7, 0.2 0.5, 0.25, 0.3 | −20.98 −21.08 −19.6 −25.70 | X, Y, Z 0.13, 1.87, 0.01 1.25, 2.10, 0.05 0.9, 0.9, 0.08 2.5, 0.2, 0.3 | −25.40 −19.08 −14.7 −16.70 |
| w/o GA | X, Y, Z 1.15, 0.37, 0.03 1.25, 1.02, 0.01 1.5, 1.9, 0.4 0.6, 0.5, 0.23 | −26.40 −19.08 −17.9 −23.70 | X, Y, Z 1.13, 2.87, 0.08 0.25, 2.10, 0.07 1.3, 1.0, 0.1 0.5, 0.25, 0.3 | −14.40 −18.08 −12.1 −15.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddique, A.; Delwar, T.S.; Ryu, J.-Y. A Novel Optimized V-VLC Receiver Sensor Design Using μGA in Automotive Applications. Sensors 2021, 21, 7861. https://doi.org/10.3390/s21237861
Siddique A, Delwar TS, Ryu J-Y. A Novel Optimized V-VLC Receiver Sensor Design Using μGA in Automotive Applications. Sensors. 2021; 21(23):7861. https://doi.org/10.3390/s21237861
Chicago/Turabian StyleSiddique, Abrar, Tahesin Samira Delwar, and Jee-Youl Ryu. 2021. "A Novel Optimized V-VLC Receiver Sensor Design Using μGA in Automotive Applications" Sensors 21, no. 23: 7861. https://doi.org/10.3390/s21237861
APA StyleSiddique, A., Delwar, T. S., & Ryu, J.-Y. (2021). A Novel Optimized V-VLC Receiver Sensor Design Using μGA in Automotive Applications. Sensors, 21(23), 7861. https://doi.org/10.3390/s21237861