
A Dynamic Motion Analysis of a Six-Wheel Ground Vehicle for Emergency Intervention Actions

 ,
,  , and
, and
Abstract
:1. Introduction
- Limitations on the progression of the robot under the conditions imposed by missions to detect the level of radiation
- The level of radiation that may affect the communication system or the quality of the data captured by the sensors
- Identification of obstacles
- Reserve of energy resources
- Imperfections due to the execution of the robot, which was constructed in the laboratory
- Discussing a robotic system (carrier vector and operational vector), which, to complete, requires four main stages:
- ○
- Establishing the analytical-numerical model to achieve the kinematic and dynamism performance required to complete the missions presented above
- ○
- Developing a navigation model that avoids obstacles
- ○
- Improving operational platforms
- ○
- Testing and evaluation of the robotic system
2. Configuration of the Intervention Robot
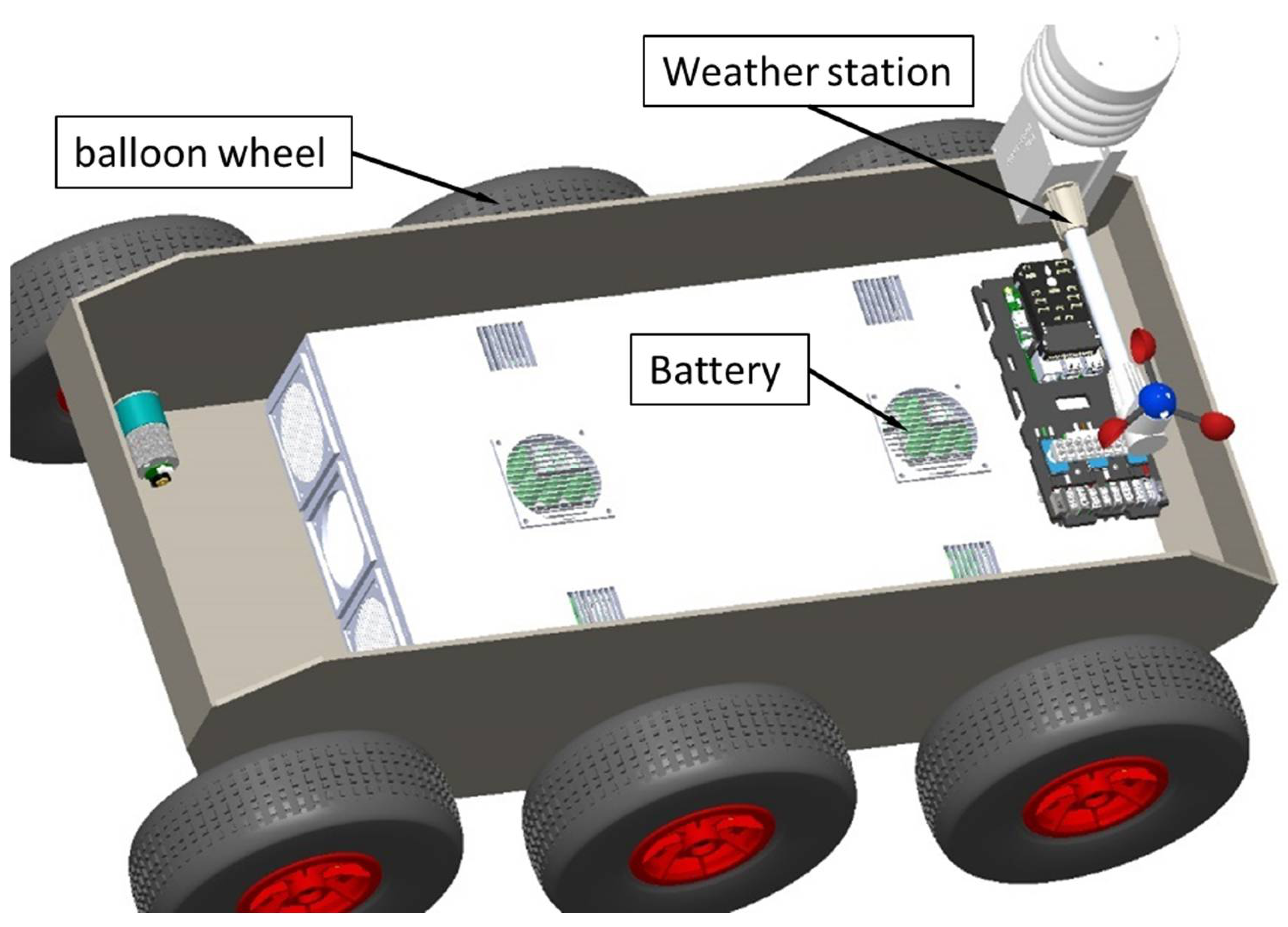
2.1. Hardware
- Its perception is constituted from a system of sensors, controllers, and software modules that are essential for moving from point A to point B. The perception system detects, classifies, and localizes natural and artificial features of the unstructured environment in which it moves. The specific objectives of the perception system for crossing a path, following a planned path and avoiding the obstacles, come from the necessary velocity of the vehicle and from the characteristics of the presumed working environment (the density of the obstacles, visibility, illumination, weather, and the edges of the road) so that the UGV can determine the corresponding velocity, stop, or avoid obstacles [4,17].
- When planning the paths that will be followed, a path is generated with no collisions in an environment with obstacles, and the path is optimized by respecting some criteria. This deals with the planning methods of global and local paths. The planning methods use the data captured by the sensors to estimate the parameters of the environment and moving the robot in real-time. The global method needs a completely known environment and certain simplifying methods; for the local method, the algorithm allows some real-time adjustments to the path to be followed. Planning implies optimization procedures of the time (and velocities) to select the geometrical paths in real-time to avoid obstacles [18,19,20,21]. Since every obstacle creates a risk level for the UGV, introducing proportional integrative derivative (PID) controllers and fuzzy logic methods, which classify the objects around the vehicle based on their level of risk, allows generating some predictions regarding the capacity to avoid fixed or moving obstacles (the velocity obstacle (VO) approach), which means that, virtually, a space that defines the respective object should be generated [22,23,24].
- The mission of a UGV agrees with path planning through adopting some algorithms that can generate optimal behavior and, each time discrepancies from the initial map appear, these data are updated. Thus, the error and cost functions increase the efficiency when crossing a certain space, and the search would become faster [25,26].
- The wireless communication and tele-command of a UGV with a ground control station (GCS) with an operator or with another robot are achieved through wireless mesh networks (WMNs). These networks are self-organized and dynamically auto-configured. For quality communication, these systems have scalability and security as objectives [27,28]. Tele-command is very important [28], even though its functionalities are due to its sensors; the video Infra-Red/Electro-Optical (IR/EO) devices and any other attached devices allow the sampling of data [29,30,31].
- The navigation system of a robot is a non-structured environment that uses path planning, obstacle avoidance and circumnavigating, localization, and perceptive interpretation techniques. All these cannot be combined in a single system (a single software application), which is why for each robotic system, a custom project must be realized with a software system that should be adapted to the respective application. A navigation architecture becomes efficient if the mobility of the robot is divided into specialized software modules. This architecture consists of software modularity (as a consequence of introducing a new sensor or maintaining some obstacle avoidance modules based on certain cinematics), robot location control based on the different functionalities and learning algorithms, techniques of time-domain analysis (response time of the sensors, temporal depth, space localization, and decision making based of the dynamics of the robot), and decoupled control [32,33,34,35,36].
- Implementing machine learning and deep learning techniques requires precise information so that the path planning allows locating the robot in space and memorizing the position of obstacles. UGVs are complex autonomous systems that use artificial intelligence (AI) through image recognition, human-machine interaction, intelligent decisions, logic, and learning. The deep learning algorithms restricted Boltzmann machines (RBMs), and convoluted neural networks (CNNs) are specially used for computer vision (CV) applications for object recognition. The data quantity necessitates using algorithms of the back-propagation types to compute the gradients and stochastic gradient descent optimization methods to minimize the errors in the outputs from the network as a function of the corresponding inputs. Apart from these, various auto-encoders, capsule networks, and synthetic gradients are needed, which we will discuss in future research in the domain of UGVs [37,38,39,40,41,42].
- Obstacles are defined as the elements that appear on the robot’s path—bumps and ditches are just elements of the road that are described in the equations of the contact of the engine with the ground.
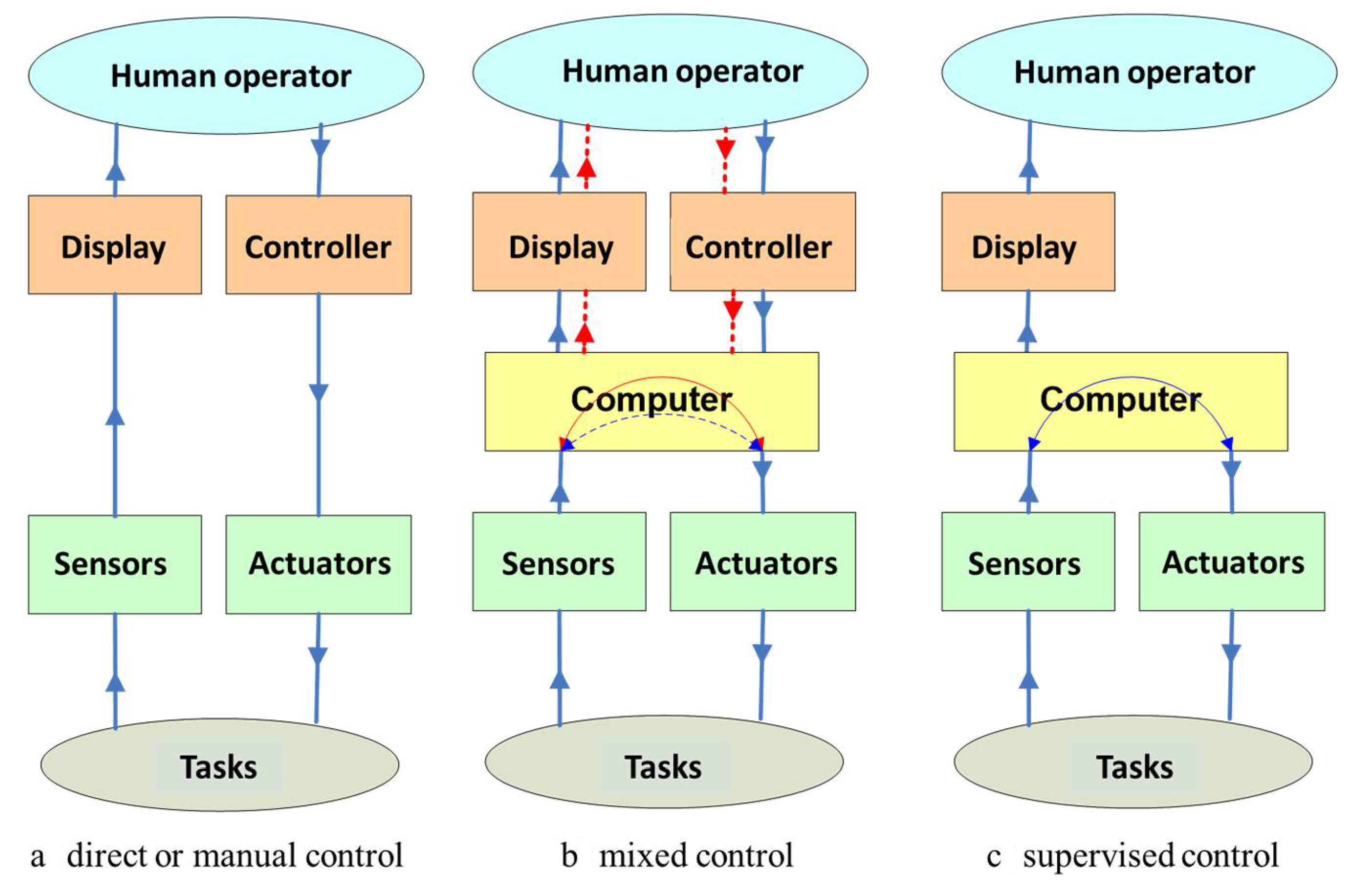
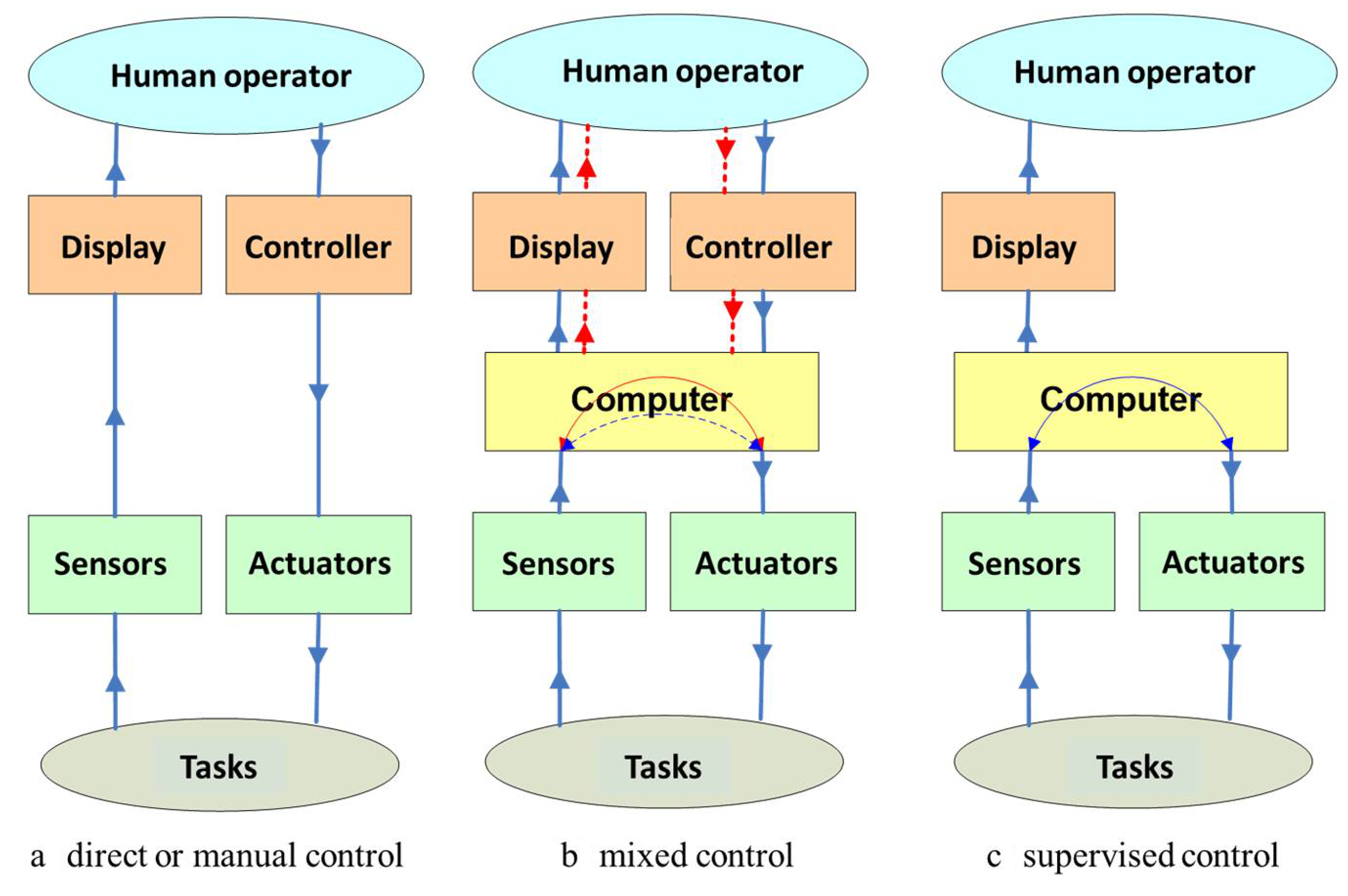
2.2. The Controller
- Direct or manual control: The robot does not have artificial intelligence or autonomy, and the operator controls the movement of the robot directly without automatic aid; the principle of operation is very simple and is based on four bits (forward-backward and left-right), in which case signal identification is a priority, as the microcontroller timer is used as an internal counter so that it can calculate the pulse width from the motor shaft [45].
- Mixed control: The robot has a certain degree of artificial intelligence and/or autonomy, and the operator helps it to perform certain operations; to switch to autonomous mode, the system of sensors for orientation (gyroscope) and measurement of distances (odometer) make predictions about the next path to follow. The greater the distance from the operator, the more difficult the teleoperation, especially due to the visual effect on the operator due to the movements of the vehicle and the orientation of the camera. If the orientation of the camera does not correctly compensate for the vehicle’s rotation, it will cause a shunt of the camera and wrong decisions related to the movement of the vehicle [46].
- Supervised control: The robot has a high degree of intelligence and/or autonomy, while the user only intervenes at a high decision level. Control architectures are designed to allow the use of a single control law for each context: the route to the target, the avoidance of obstacles, etc. To manage the interactions between controllers depending on the context, multi-agent systems are used, which can self-organize depending on the emergence of phenomena [47].
- i.
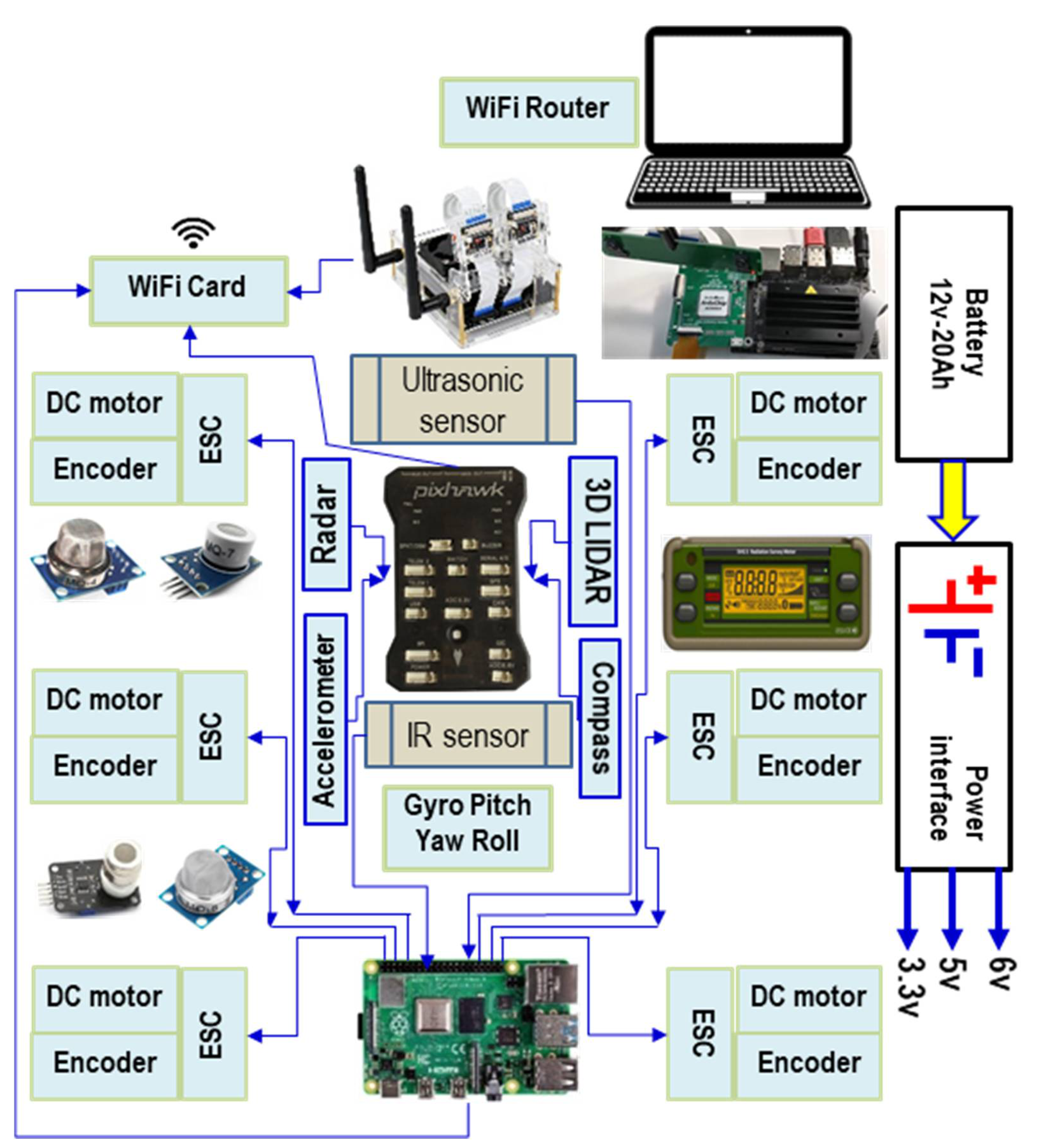
- The obstacle detection module, consisting mainly of sensors for measuring distance. The use of several types of sensors (ultrasonic, IR, and 3DLIDAR) was used to allow obtaining values as close as possible to reality. Each type of sensor had its own characteristics regarding the maximum/minimum measuring distance. The 3DLIDAR sensor had the role of performing an overall scan, allowing the lifting of a 3D survey of the area of interest. Overlapping information from the three types of sensors would provide a map of the terrain, including beyond the open view.
- ii.
- The orientation module, composed of inertial sensors, GPS, compass, magnetometer, gyroscope, was used to analyze the position of the robot but also the obstacles to the global and local reference system. This information passed through the displacement algorithm determining the optimal path between the local reference point and the final position. The final position could be variable or fixed. We are talking about fixed targets when we are dealing with stable emergencies. In general, the kinematic and dynamic characteristics of the targets can be variable. For example, the flames of a fire can have different intensities depending on the nature of the combustible material, the direction and speed of the wind, etc.
- iii.
- The motor supply voltage control module consisted of the encoder, and the electronic speed controller (ESC) has the role of modifying the speed and direction of rotation of the motors so that the robot can move on a certain route. It also knows when and how much energy to deliver to the engines when leaving the place or climbing some slopes or climbing some obstacles. In the case of intervention in terrorist actions (artisanal bombs, etc.), the engines must be very stable so that no vibrational phenomena occur. In addition to the traction motors, there will also be motors for the manipulator on the robot.
- iv.
- The module consisted of two types of controllers, Raspberry Pi and Pixhawk, which handled the management of all components of the robot. The Raspberry controller controlled the engines, managed the sensors, the power supply system. The Pixhawk controller handled the management of the navigation system.
- v.
- The module consists of an NVIDIA Jetson nano-controller; two video cameras had the mission of taking video images, analyzing them, and/or sending them wirelessly to the GCS in order to prepare the route to be followed by the robot. The Jeston nano-controller also had a master role.
- vi.
- The power supply module was a structure made up of Li-Ion batteries type 18,650, 5000 mAh, 3.7 V.
- vii.
- Wireless communication module: router and a cheap and available ESP8266 Wi-Fi module with full TCP/IP capability and microcontroller capability. It could be used with any Pixhawk, Raspberry Pi, or Jetson nano-controller.
2.3. External Sensor System
2.4. Propulsion System
3. Analytical Model
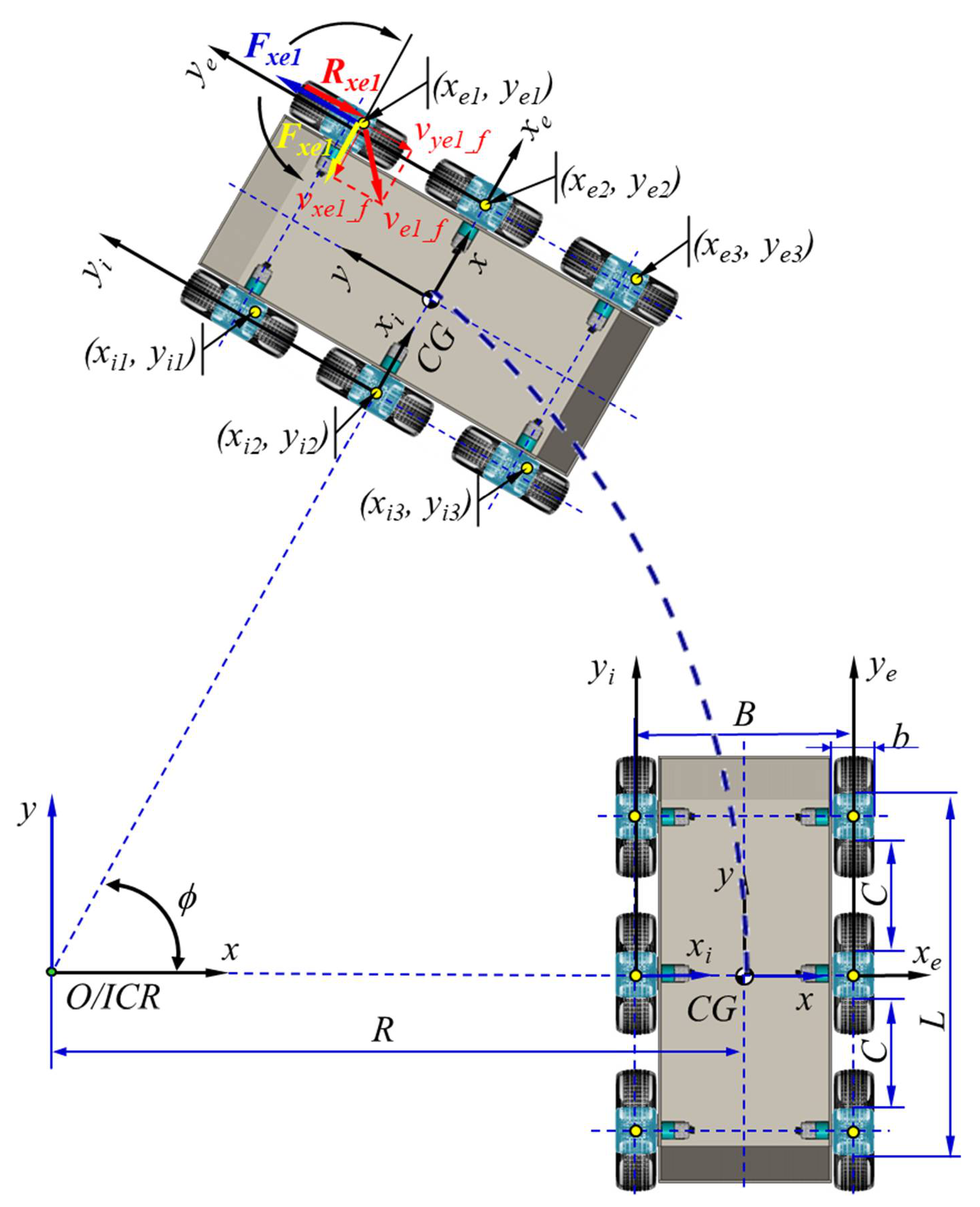
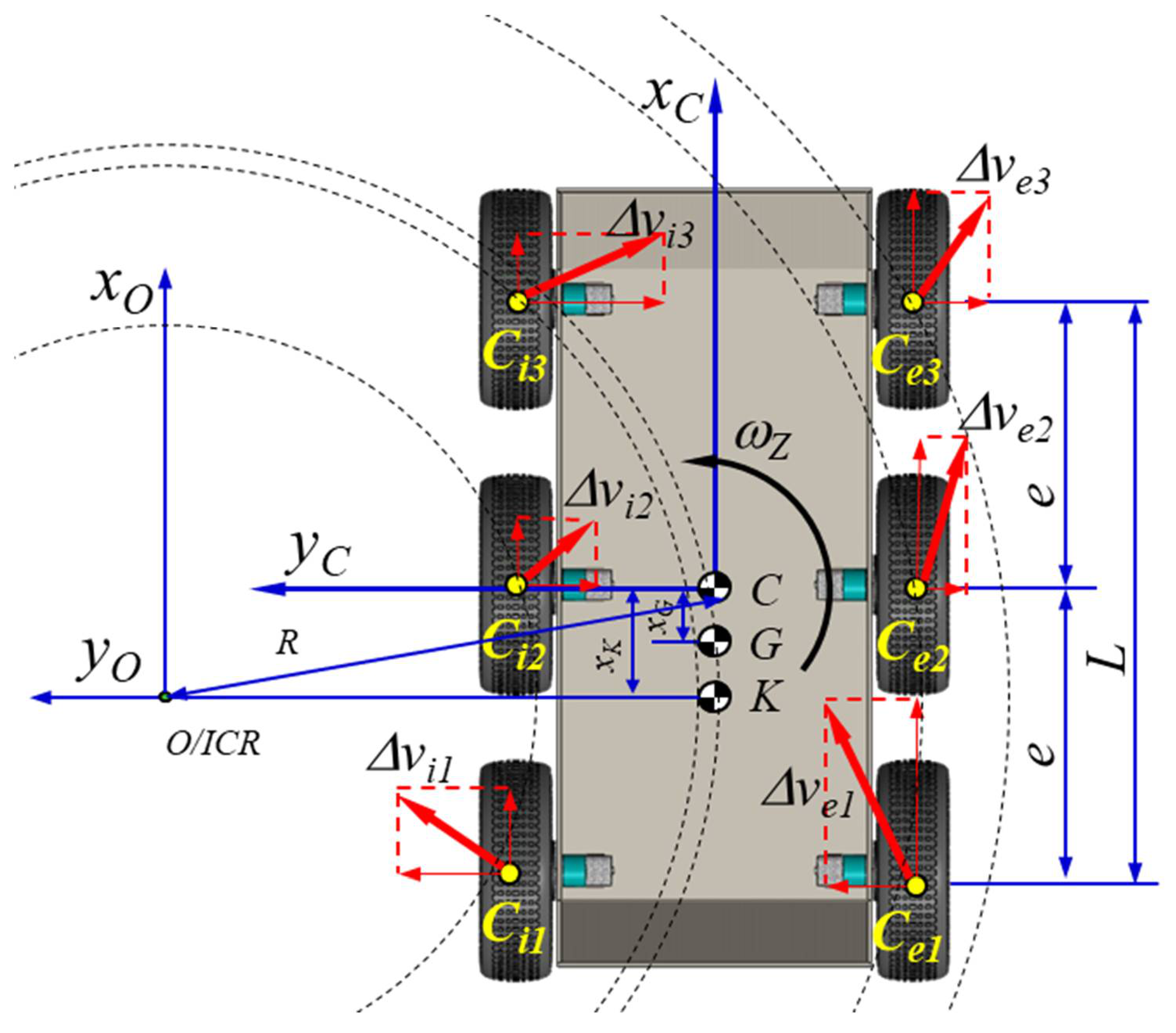
3.1. Kinematics of the Robot with a 6 × 6 Propulsion System
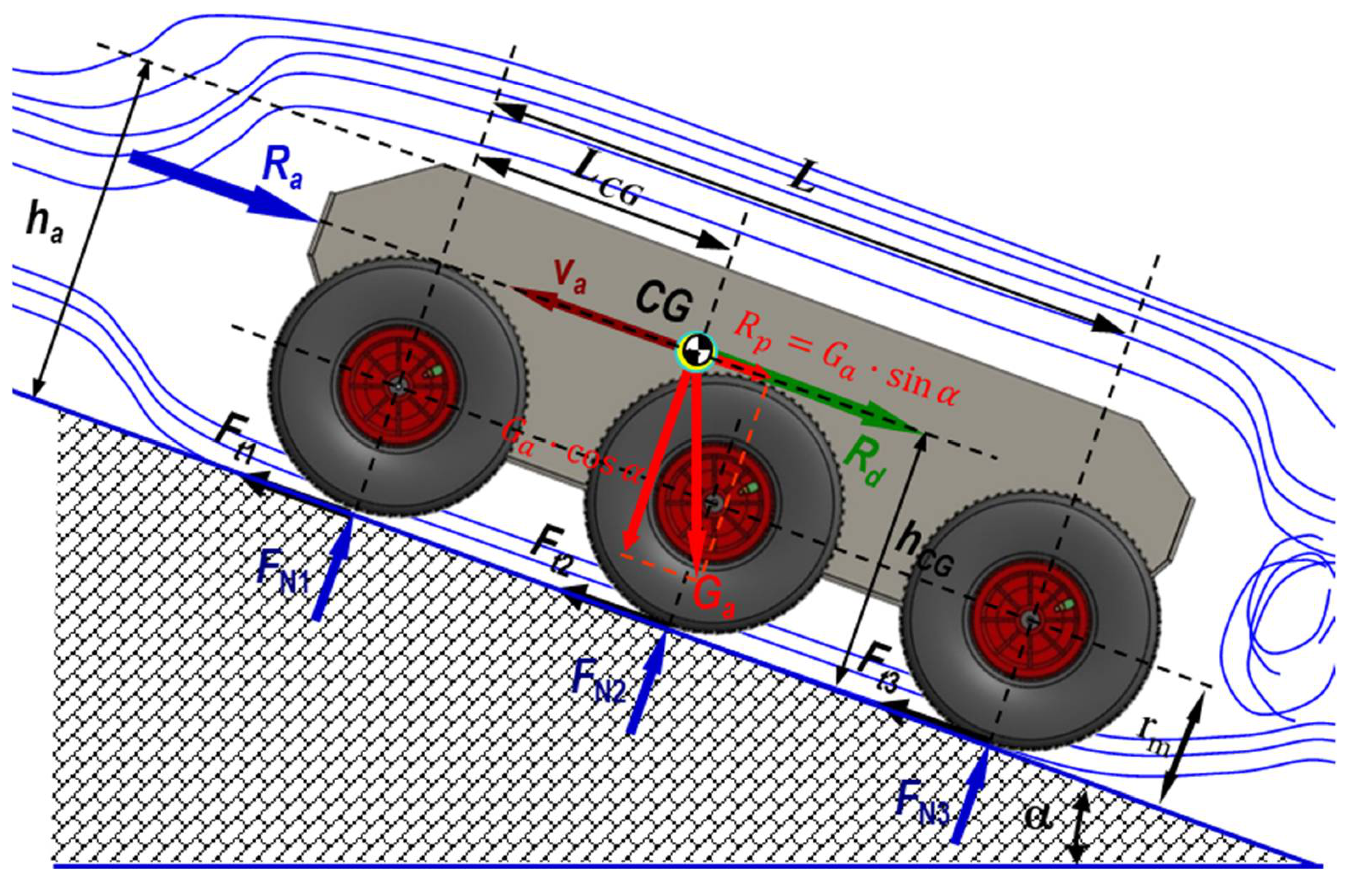
3.2. Dynamics of the Robot with a 6 × 6 Propulsion System
3.2.1. D Robotics Dynamics
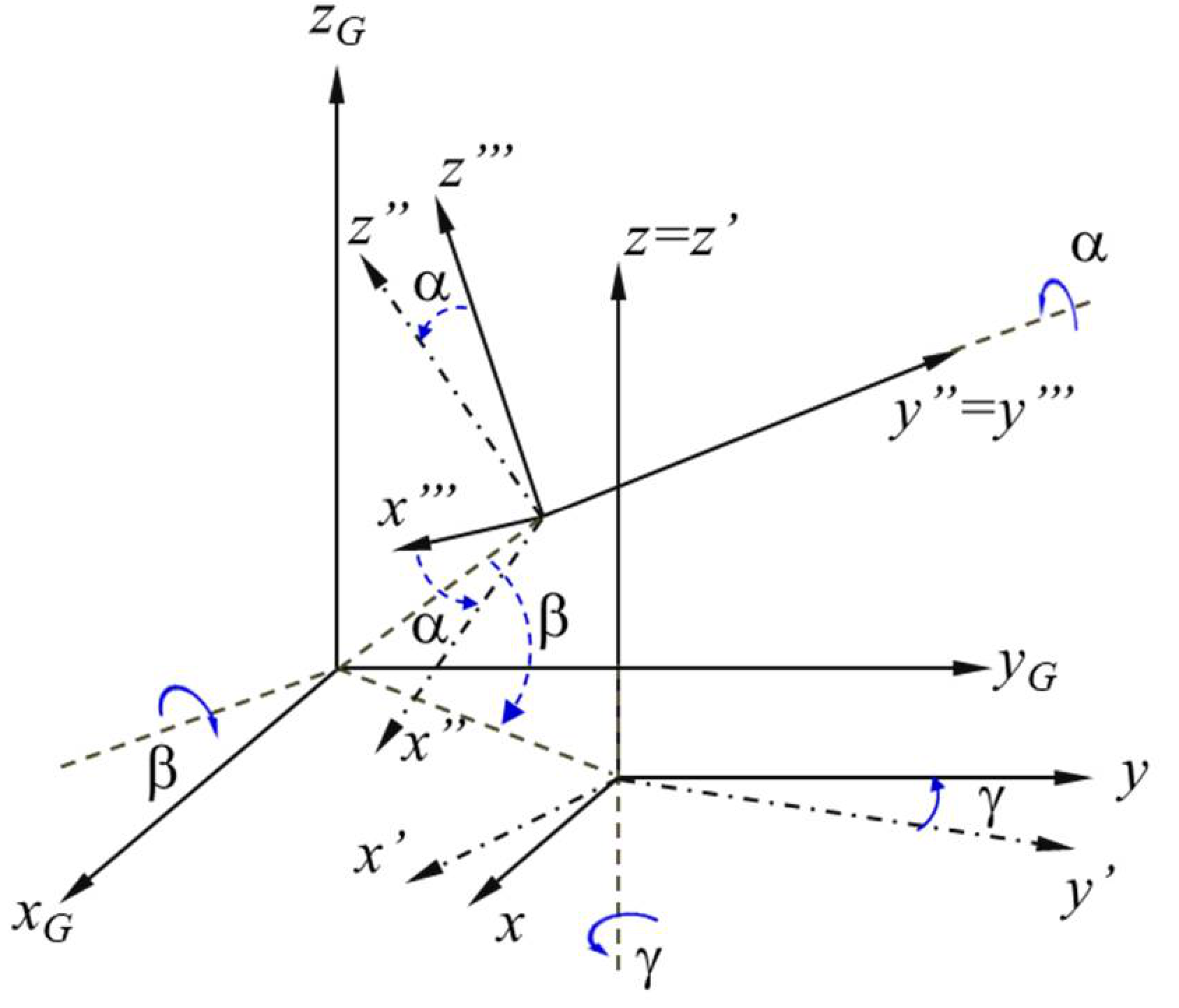
3.2.2. D Robotics Dynamics
4. Simulation of the 6 × 6 Propulsion System
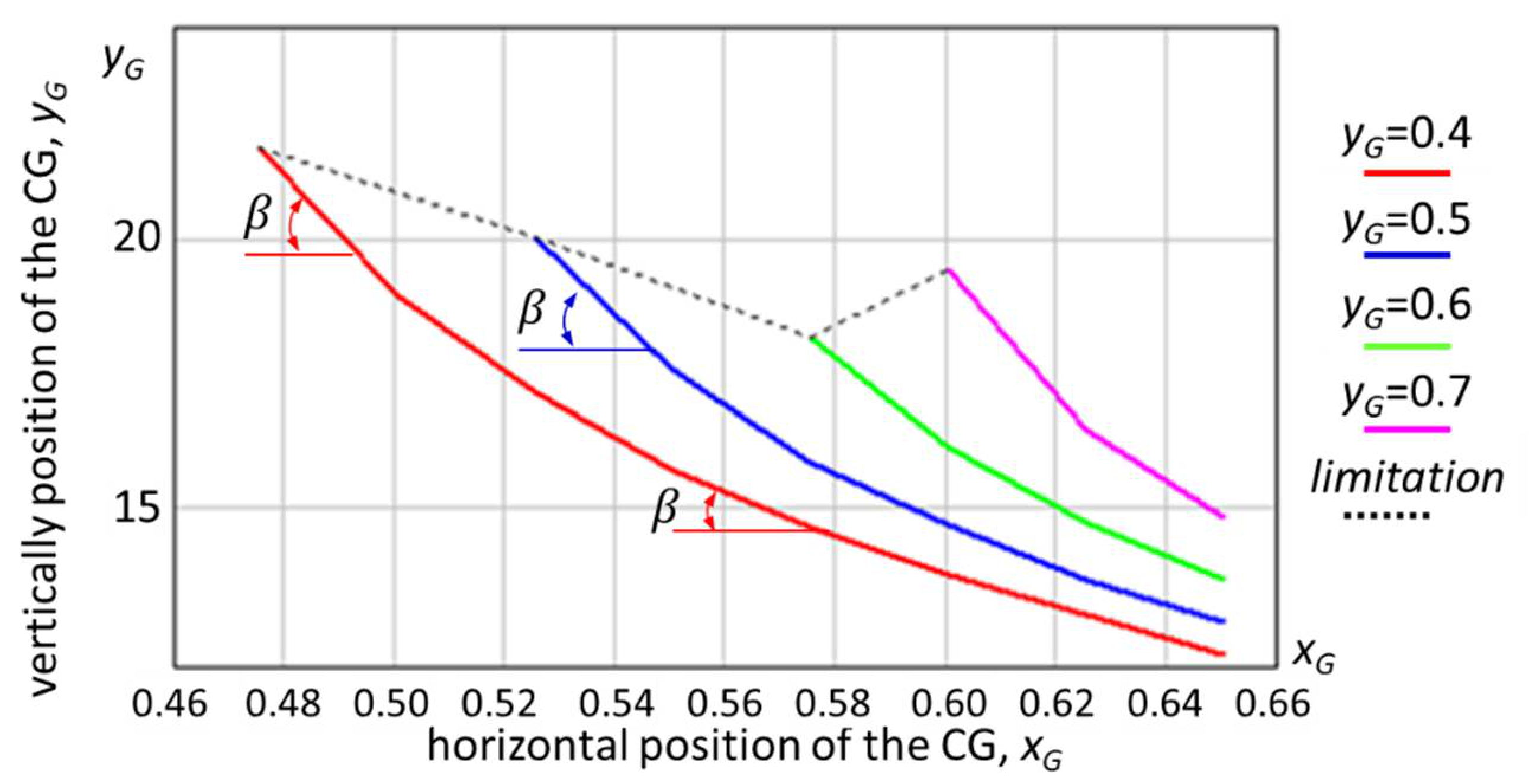
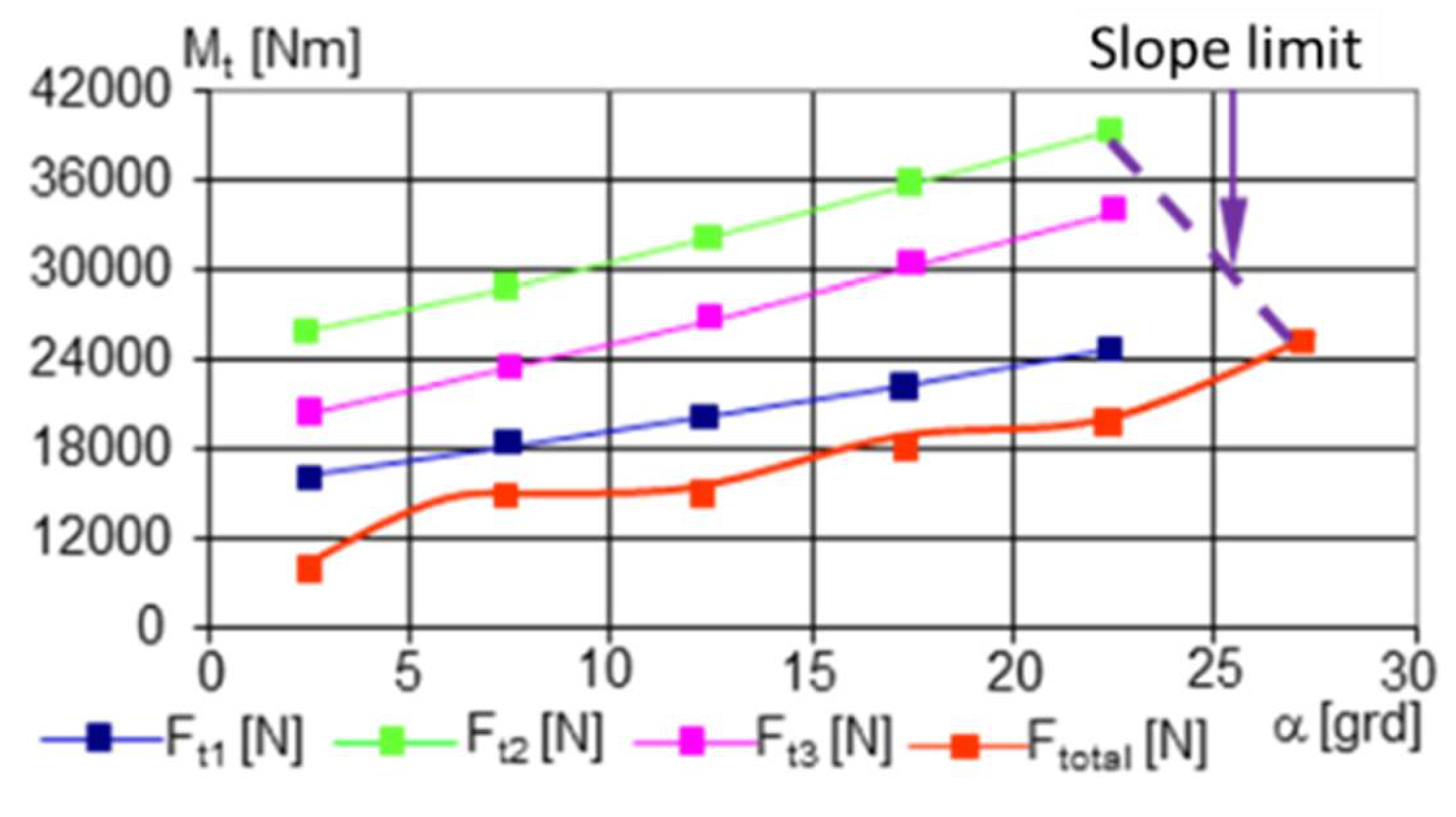
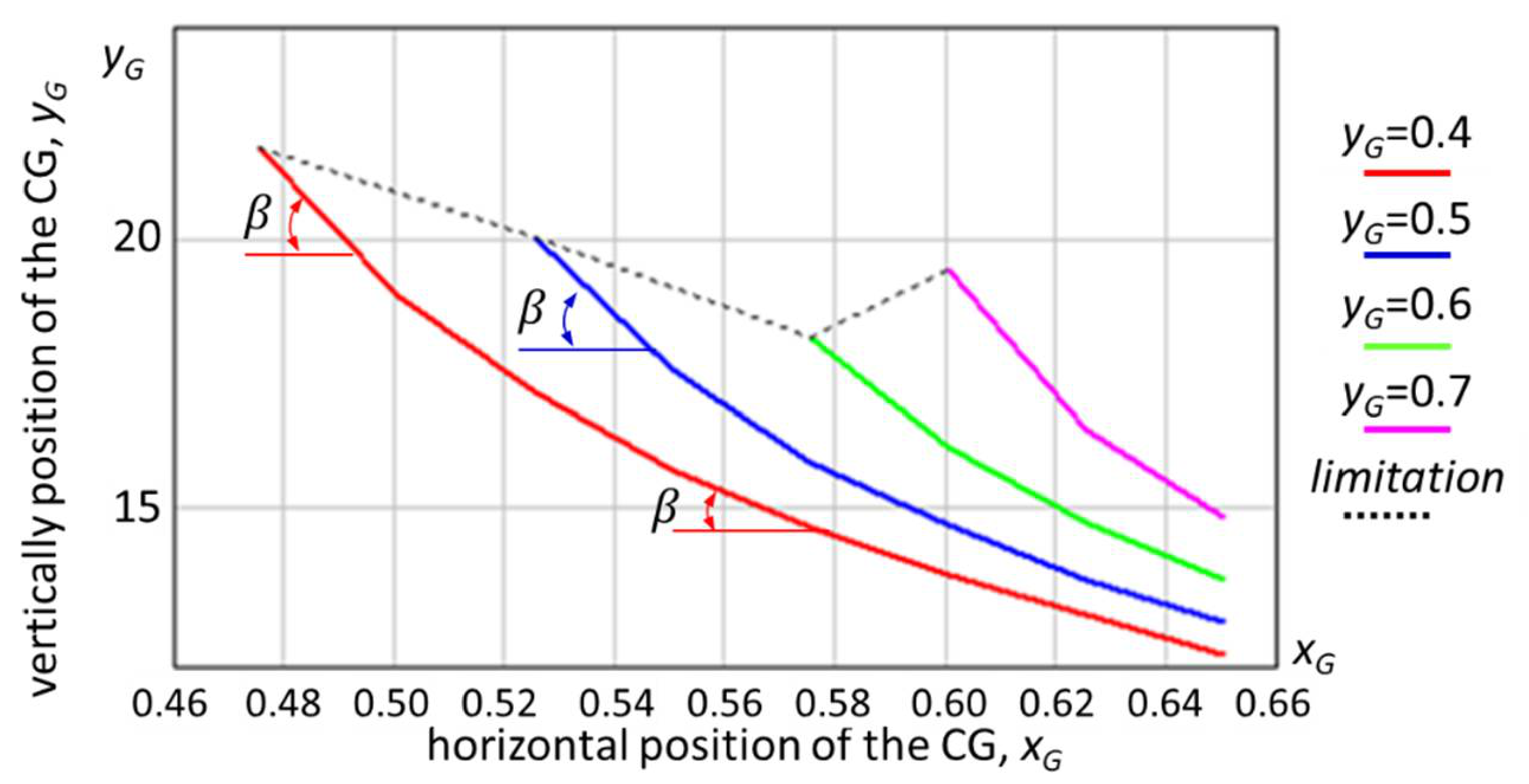
4.1. Simulation of Slope Climbing
4.2. Simulation of Crossing a Step-Type Obstacle
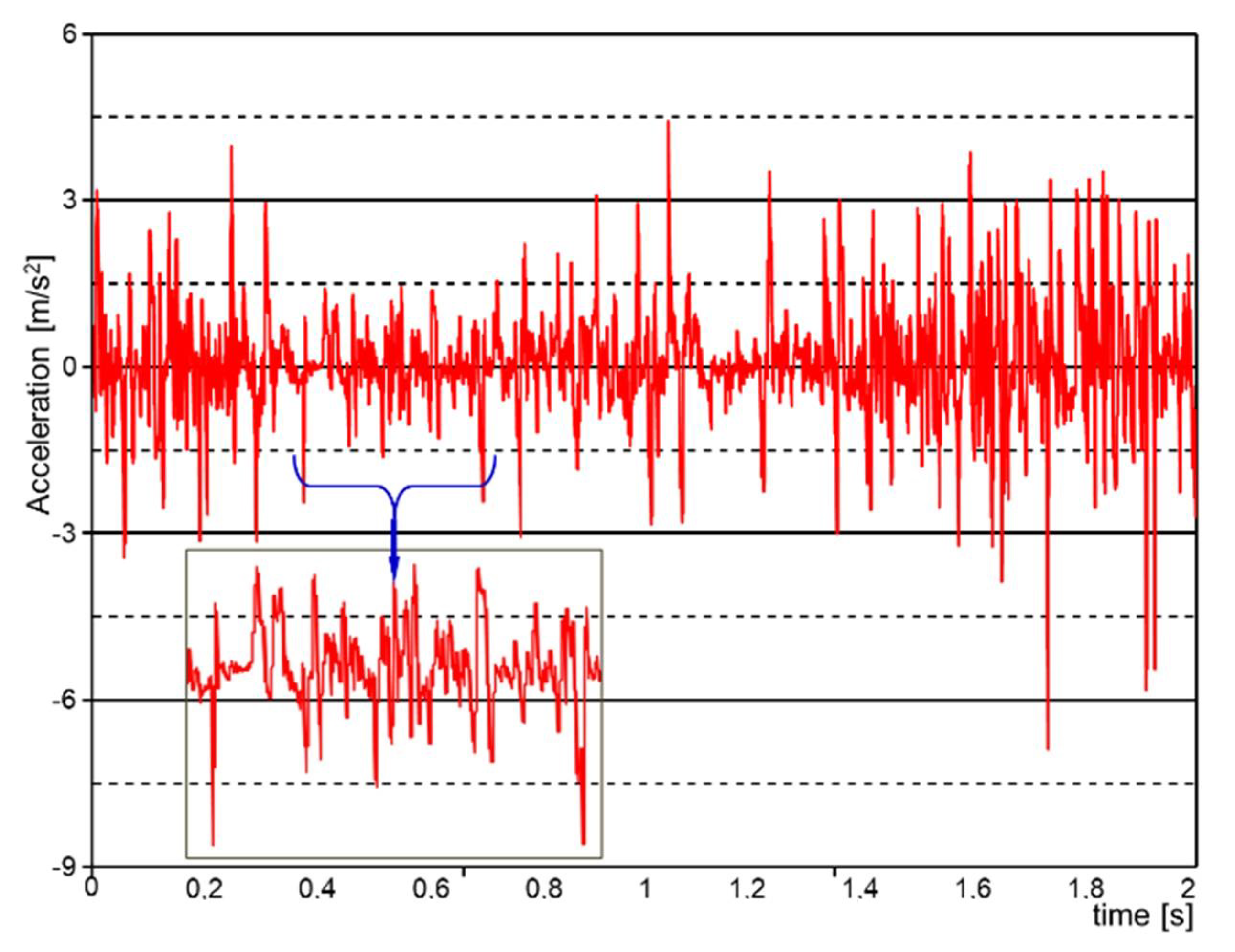
5. Testing the Braking When Descending a Slope in Dynamic Mode
6. Discussion of Potential Emergency Response Missions
6.1. Emergency Response to Fires
6.2. Intervention in Emergencies Due to Gamma Radiation Emissions
- Improving safety by eliminating direct exposure of personnel to possible hazardous radiation.
- Reduction in operating time.
- The accuracy and precision of providing information.
- Reducing costs to help minimize the social and economic impact of possible accidents.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radius of the wheels | 130.00 |
| Wheelbase | 400.00 |
| Distance between the front deck and the center of mass | 200.00 |
| Height of the center of mass related to the rolling path | 125.00 |
| Mass of the unequipped robot | 35.00 |
| Adhesion coefficient | 0.8 |
References
- Hoeppe, P. Trends in weather related disasters—Consequences for insurers and society. Weather Clim. Extrem. 2016, 11, 70–79. [Google Scholar] [CrossRef] [Green Version]
- Fire and Rescue Authorities Operational Guidance Generic Risk Assessment 3.10 Fighting Fires in Petrochemical Plant and Pipelines. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/877073/GRA_3-10_archived.pdf (accessed on 24 February 2021).
- Nuță, I. Contributions to the Development and Improvement of Emergency Intervention Techniques. Ph.D. Thesis, Military Technical Academy “FERDINAND I”, Bucharest, Romania, 2013; p. 352. [Google Scholar]
- Virginia Tech Takes on Department of Defense Challenge to Build Disaster-Response Robots. Available online: https://vtnews.vt.edu/articles/2012/10/102412-engineering-thorrobotannouncement.html. (accessed on 24 February 2021).
- Kurvinen, K.; Smolander, P.; Pöllänen, R.; Kuukankorpi, S.; Kettunen, M.; Lyytinen, J. Design of a radiation surveillance unit for an unmanned aerial vehicle. J. Environ. Radioact. 2005, 81, 1–10. [Google Scholar] [CrossRef]
- Martínez, J.L.; Morales, J.; Sánchez, M.; Morán, M.; Reina, A.J.; Fernández-Lozano, J.J. Reactive Navigation on Natural Envi-ronments by Continuous Classification of Ground Traversability. Sensors 2020, 20, 6423. [Google Scholar] [CrossRef] [PubMed]
- Yukihisa, S.; Takeshi, S.; Yukiyasu, N.; Atsuya, K.; Tatsuo, T. The Aerial Radiation Monitoring in Japan after the Fukushima Daiichi Nuclear Power Plant Accident. Prog. Nucl. Sci. Technol. 2014, 4, 76–80. [Google Scholar]
- Lowdon, M.; Martin, P.G.; Hubbard, M.; Taggart, M.; Connor, D.T.; Verbelen, Y.; Sellin, P.; Scott, T.B. Evaluation of Scintillator Detection Materials for Application within Airborne Environmental Radiation Monitoring. Sensors 2019, 19, 3828. [Google Scholar] [CrossRef] [Green Version]
- Chee, F.T.; Sivakumar, D.M. Fire Fighting Mobile Robot: State of the Art and Recent Development, Malacca. Aust. J. Basic Appl. Sci. 2013, 7, 220–230. [Google Scholar]
- Grigore, L.Ș.; Soloi, A.; Tiron, O.; Răcuciu, C. Fundamentals of Autonomous Robot Classes with a System of Stabilization of the Gripping Mechanism. Adv. Mater. Res. 2013, 646, 164–170. [Google Scholar] [CrossRef]
- Park, J.-H.; Kim, B.-W.; Park, D.-J.; Kim, M.-J. A System Architecture of Wireless Communication for Fire-Fighting Robots. IFAC Proc. Vol. 2008, 41, 5303–5307. [Google Scholar] [CrossRef] [Green Version]
- Nuţă, I.; Orban, O.; Grigore, L. Development and Improvement of Technology in Emergency Response. Procedia Econ. Financ. 2015, 32, 603–609. [Google Scholar] [CrossRef] [Green Version]
- Grigore, L.S.; Priescu, I.; Joita, D.; Oncioiu, I. The Integration of Collaborative Robot Systems and Their Environmental Impacts. Processes 2020, 8, 494. [Google Scholar] [CrossRef] [Green Version]
- Gomez, J.C.; Ceballos, M.N.D. Hardware and software architecture for a Rover robot. Revista Avances en Sistemas e Informática Medellín 2011, 8, 494. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.; Lee, D.-J.; Schoenberger, R.; Wei, Z.; Archibald, J. Semi-autonomous unmanned ground vehicle control system. Def. Secur. Symp. 2006, 6230, 62301. [Google Scholar] [CrossRef]
- Grigore, L.Ș.; Priescu, I.; Grecu, D.L. Applied Artificial Intelligence in Fixed and Mobile Robotic Systems. Cap 4 Terrestrial Mobile Robots; AGIR: Bucharest, Romania, 2020; p. 703. ISBN 978-973-72-0767-8. [Google Scholar]
- Millard, F.R.; Aggarwal, R.; David, E.; Aspens, D.E.; Feddema, J.T.; Goodwine, J.W., Jr.; Kelly, C.W., III; Lehowicz, L.; McLaughlin, A.J.; Murphy, R.R.; et al. Technology Development for Army Unmanned Ground Vehicles; The National Academies Press: Washington, DC, USA, 2002. [Google Scholar]
- Wu, Q.; Chen, Z.; Wang, L.; Lin, H.; Jiang, Z.; Li, S.; Chen, D. Real-Time Dynamic Path Planning of Mobile Robots: A Novel Hybrid Heuristic Optimization Algorithm. Sensors 2019, 20, 188. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.; Kim, Y.; Yi, H. Fuzzy Analytic Hierarchy Process-Based Mobile Robot Path Planning. Electronics 2020, 9, 290. [Google Scholar] [CrossRef] [Green Version]
- Hegedus, T.; Németh, B.; Gáspár, P. Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles. Appl. Sci. 2020, 10, 7716. [Google Scholar] [CrossRef]
- Guo, F.; Wang, S.; Yue, B.; Wang, J. A Deformable Configuration Planning Framework for a Parallel Wheel-Legged Robot Equipped with Lidar. Sensors 2020, 20, 5614. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Liu, G.; Tian, G.; Zhang, J. Smart Obstacle Avoidance Using a Danger Index for a Dynamic Environment. Appl. Sci. 2019, 9, 1589. [Google Scholar] [CrossRef] [Green Version]
- Zuhaib, K.M.; Khan, A.M.; Iqbal, J.; Ali, M.A.; Usman, M.; Ali, A.; Yaqub, S.; Lee, J.Y.; Han, C. Collision Avoidance from Multiple Passive Agents with Partially Predictable Behavior. Appl. Sci. 2017, 7, 903. [Google Scholar] [CrossRef] [Green Version]
- Geng, X.; Wang, Y.; Wang, P.; Zhang, B. Motion Plan of Maritime Autonomous Surface Ships by Dynamic Programming for Collision Avoidance and Speed Optimization. Sensors 2019, 19, 434. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Cos-Cholula, H.E.; Diaz-Arango, G.U.; Hernandez-Martinez, L.; Vazquez-Leal, H.; Sarmiento-Reyes, A.; Sanz-Pascual, M.T.; Herrera-May, A.L.; Castaneda-Sheissa, R. FPGA Implementation of Homotopic Path Planning Method with Automatic As-signment of Repulsion Parameter. Energies 2020, 13, 2623. [Google Scholar] [CrossRef]
- Gwon, J.; Kim, H.; Bae, H.; Lee, S. Path Planning of a Sweeping Robot Based on Path Estimation of a Curling Stone Using Sensor Fusion. Electronics 2020, 9, 457. [Google Scholar] [CrossRef] [Green Version]
- Akyildiz, I.; Wang, X. A survey on wireless mesh networks. IEEE Commun. Mag. 2005, 43, S23–S30. [Google Scholar] [CrossRef]
- Rao, N. Dynamic Data Transmission Using Wireless Sensor Networks. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2014, 4, 837–841. [Google Scholar]
- Parasuraman, R.; Caccamo, S.; Baberg, F.; Ogren, P.; Neerincx, M. A New UGV Teleoperation Interface for Improved Awareness of Network Connectivity and Physical Surroundings. J. Hum. Robot Interact. 2017, 6, 48. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Atia, M.M.; Gao, Y.; Noureldin, A. Adaptive Covariance Estimation Method for LiDAR-Aided Multi-Sensor Integrated Navigation Systems. Micromachines 2015, 6, 196–215. [Google Scholar] [CrossRef]
- Grace, P.; Hughes, D.; Porter, B.; Alcock, P.; Coulson, G.; Blair, G. Middleware Support for Dynamic Reconfiguration in Sensor Networks. Available online: https://eprints.lancs.ac.uk/id/eprint/42464/2/grace09reconfiguration.pdf (accessed on 24 February 2021).
- Azouaoui, O.; Oudah, N.; Mansour, I.; Sema, A. Soft-computing based navigation approach for a bi-steerable mobile robot, Kybernetes. Int. J. Syst. Cybern. 2013, 42, 241–267. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Rawankar, A.; Hoshino, Y.; Kobayashi, Y. ITC: Infused Tangential Curves for Smooth 2D and 3D Navigation of Mobile Robots. Sensors 2019, 19, 4384. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots, a Bradford Book; The MIT Press: Cambridge, MA, USA, 2004; p. 335. ISBN 0-262-19502-X. [Google Scholar]
- Xiao, P.; Ju, H.; Li, Q.; Chen, F. Task Planning of Space-Robot Clusters Based on Modified Differential Evolution Algorithm. Appl. Sci. 2020, 10, 5000. [Google Scholar] [CrossRef]
- Pandey, A.; Parhi, D.R. New algorithm for behaviour-based mobile robot navigation in cluttered environment using neural network architecture. World J. Eng. 2016, 13, 129–141. [Google Scholar] [CrossRef]
- Yakub, F.; Abu, A.; Sarip, S.; Mori, Y. Study of Model Predictive Control for Path-Following Autonomous Ground Vehicle Control under Crosswind Effect. J. Control Sci. Eng. 2016, 2016, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y. Model Predictive Control for Autonomous and Semiautonomous Vehicles. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2014.
- O’Mahony, N.; Campbell, S.; Krpalkova, L.; Riordan, D.; Walsh, J.; Murphy, A.; Ryan, C. Deep Learning for Visual Navigation of Unmanned Ground Vehicles: A review. In Proceedings of the 2018 29th Irish Signals and Systems Conference (ISSC), Belfast, UK, 21–22 June 2018; pp. 1–6. [Google Scholar]
- Shan, T. Minimalistic and Learning-Enabled Navigation Algorithms for Unmanned Ground Vehicles. Ph.D. Thesis, Faculty of the Stevens Institute of Technology, Hoboken, NJ, USA, 2019. [Google Scholar]
- Zhang, T.; Li, Q.; Zhang, C.-S.; Liang, H.-W.; Li, P.; Wang, T.-M.; Li, S.; Zhu, Y.-L.; Wu, C. Current trends in the development of intelligent unmanned autonomous systems. Front. Inf. Technol. Electron. Eng. 2017, 18, 68–85. [Google Scholar] [CrossRef] [Green Version]
- Toma, Ș.A.; Sebacher, B.; Focșa, A.; Pura, M.L. On Anomalous Deformation Profile Detection Through Supervised and Un-supervised Machine Learning. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 7419–7422. [Google Scholar] [CrossRef]
- Appelqvist, P.; Knuuttila, J.; Ahtiaine, J. Mechatronics Design of an Unmanned Ground Vehicle for Military Applications. In Mechatronic Systems Applications; IntechOpen: London, UK, March 2010; Chapter 15; pp. 28–32. [Google Scholar] [CrossRef] [Green Version]
- Al-Mayyahi, A.; Wang, W.; Hussein, A.A.; Birch, P. Motion control design for unmanned ground vehicle in dynamic environment using intelligent controller. Int. J. Intell. Comput. Cybern. 2017, 10, 530–548. [Google Scholar] [CrossRef]
- Saputra, H.M.; Mirdanies, M. Controlling unmanned ground vehicle via 4 channel remote control. Energy Procedia 2015, 68, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Norberg, M.; Söderbäck, N.E. Design and Implementation of an Intuitive Control Method for Tracked UGVs. Master’s Thesis, KTH Industrial Engineering and Management, Stockholm, Sweden, 8 March 2011. [Google Scholar]
- Dafflon, B.; Vilca, J.; Gechter, F.; Adouane, L. Adaptive Autonomous Navigation using Reactive Multi-agent System for Control Law Merging. Procedia Comput. Sci. 2015, 51, 423–432. [Google Scholar] [CrossRef]
- Aleksandar, R.; Khalid, A.; Mirko, J. Sensor-Based Intelligent Navigation and Control of Autonomous Mobile Robots for Advanced Terrain Missions. Sci. Tech. Rev. 2010, 60, 7–15. [Google Scholar]
- Liu, G.; Zeng, W.; Feng, B.; Xu, F. DMS-SLAM: A General Visual SLAM System for Dynamic Scenes with Multiple Sensors. Sensors 2019, 19, 3714. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, X.; Fei, J. Study of a MEMS Vibratory Gyroscope Using Adaptive Iterative Learning Control. Int. J. Adv. Robot. Syst. 2014, 11, 151. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Guo, S.; Song, T.; Zeng, L. Robust Localization of the Mobile Robot Driven by Lidar Measurement and Matching for Ongoing Scene. Appl. Sci. 2020, 10, 6152. [Google Scholar] [CrossRef]
- Wong, J.Y. Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and Design, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2009; p. 488. ISBN 978-0-75-068561-0. [Google Scholar]
- Ciobotaru, T. Semi-Empiric Algorithm for Assessment of the Vehicle Mobility. Leonardo Electron. J. Pract. Technol. 2009, 8, 19–30. [Google Scholar]
- Alexa, O.; Coropețchi, I.; Vasile, A.; Oncioiu, I.; Grigore, L. Ștefăniță Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle. Sensors 2020, 20, 5587. [Google Scholar] [CrossRef]
- Pop, N.; Cioban, H.; Horvat-Marc, A. Finite element method used in contact problems with dry friction. Comput. Mater. Sci. 2011, 50, 1283–1285. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley & Sons Inc.: New York, NY, USA, 2001; p. 560. ISBN 13 978-0-471-35461-1. [Google Scholar]
- Dénes, T.; Gábor, S. Contact patch memory of tyres leading to lateral vibrations of four-wheeled vehicles. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 12. [Google Scholar]
- Wong, J.Y.; Chiang, C.F. A general theory for skid steering of tracked vehicles on firm ground. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]
- Yu, W.; Chuy, O.; Collins, E.G.; Hollis, P. Dynamic Modeling of a Skid-steered Wheeled Vehicle with Experimental Verification. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St Louis, MO, USA, 11–15 November 2009; pp. 4212–4219. [Google Scholar] [CrossRef]
- Cojocaru-Greblea, T.; Bontoș, D.; Vasiliu, N.; Dobre, A. Redundant Steering Systems for Articulated Vehicles. In Proceedings of the 17th International Multidisciplinary Scientific GeoConference SGEM 2017, Albena, Bulgaria, 29 June–5 July 2017. [Google Scholar] [CrossRef]
- Gao, J.; Ye, W.; Guo, J.; Li, Z. Deep Reinforcement Learning for Indoor Mobile Robot Path Planning. Sensors 2020, 20, 5493. [Google Scholar] [CrossRef] [PubMed]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grigore, L.Ș.; Gorgoteanu, D.; Molder, C.; Alexa, O.; Oncioiu, I.; Ștefan, A.; Constantin, D.; Lupoae, M.; Bălașa, R.-I. A Dynamic Motion Analysis of a Six-Wheel Ground Vehicle for Emergency Intervention Actions. Sensors 2021, 21, 1618. https://doi.org/10.3390/s21051618
Grigore LȘ, Gorgoteanu D, Molder C, Alexa O, Oncioiu I, Ștefan A, Constantin D, Lupoae M, Bălașa R-I. A Dynamic Motion Analysis of a Six-Wheel Ground Vehicle for Emergency Intervention Actions. Sensors. 2021; 21(5):1618. https://doi.org/10.3390/s21051618
Chicago/Turabian StyleGrigore, Lucian Ștefăniță, Damian Gorgoteanu, Cristian Molder, Octavian Alexa, Ionica Oncioiu, Amado Ștefan, Daniel Constantin, Marin Lupoae, and Răzvan-Ionuț Bălașa. 2021. "A Dynamic Motion Analysis of a Six-Wheel Ground Vehicle for Emergency Intervention Actions" Sensors 21, no. 5: 1618. https://doi.org/10.3390/s21051618
APA StyleGrigore, L. Ș., Gorgoteanu, D., Molder, C., Alexa, O., Oncioiu, I., Ștefan, A., Constantin, D., Lupoae, M., & Bălașa, R.-I. (2021). A Dynamic Motion Analysis of a Six-Wheel Ground Vehicle for Emergency Intervention Actions. Sensors, 21(5), 1618. https://doi.org/10.3390/s21051618