
High Gain Compact UWB Antenna for Ground Penetrating Radar Detection and Soil Inspection

 , ,
, ,  , ,
, ,  and
and 
Abstract
:1. Introduction
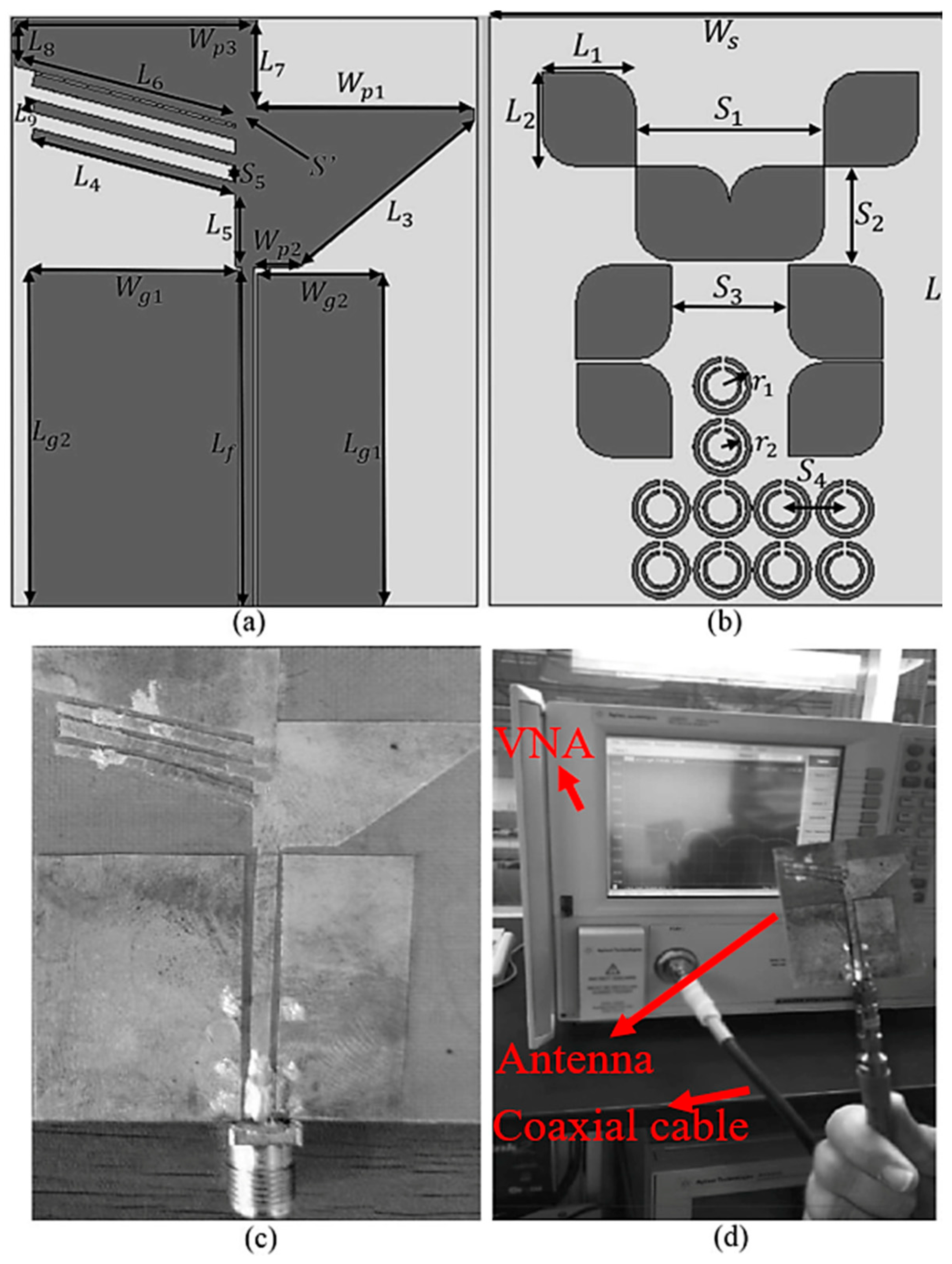
2. Antenna Configuration
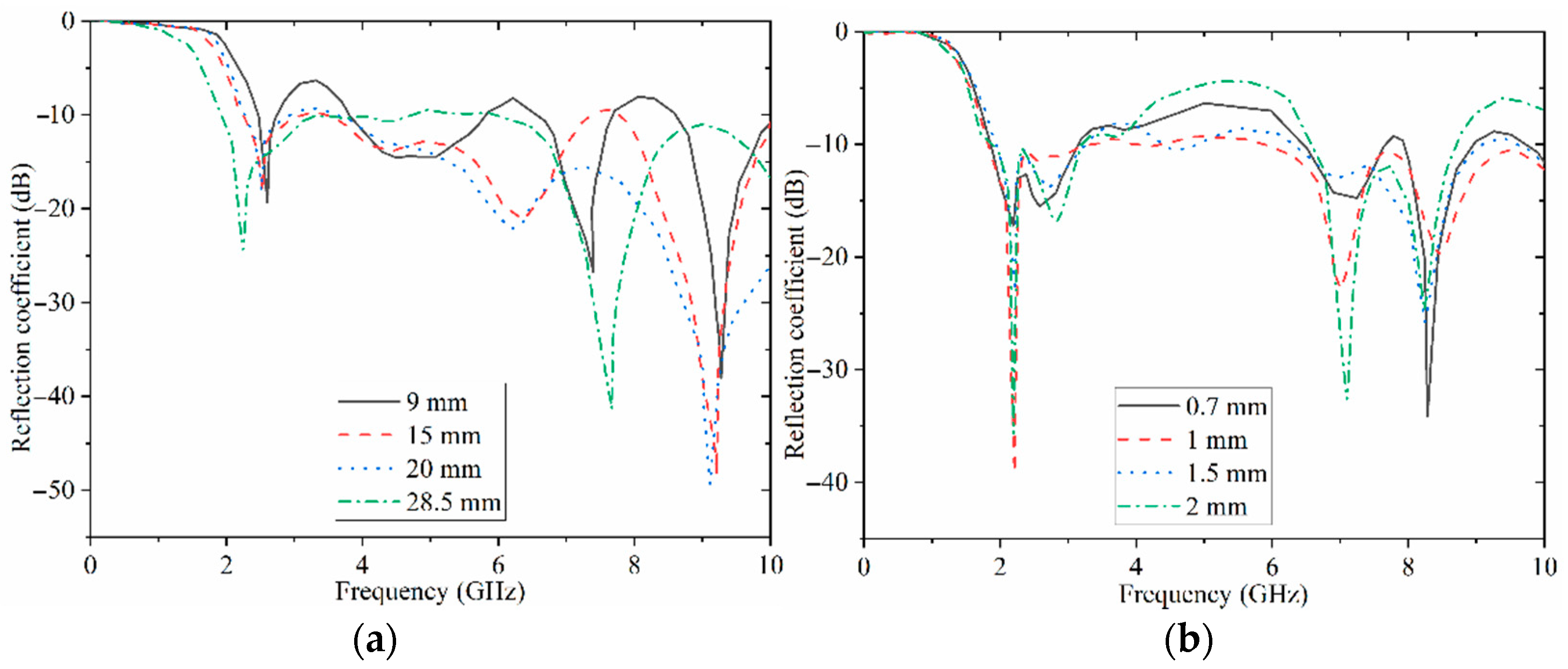
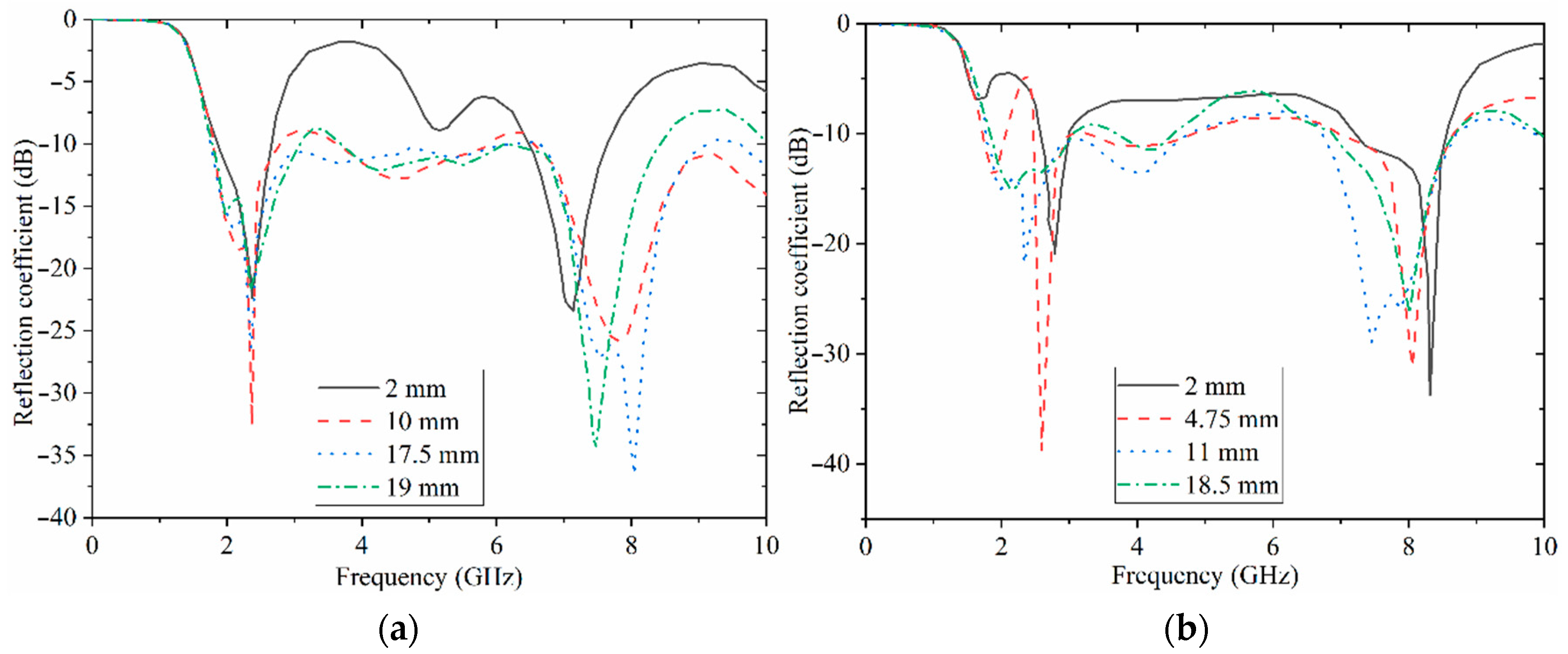
2.1. Parametric Study of the Proposed Antenna
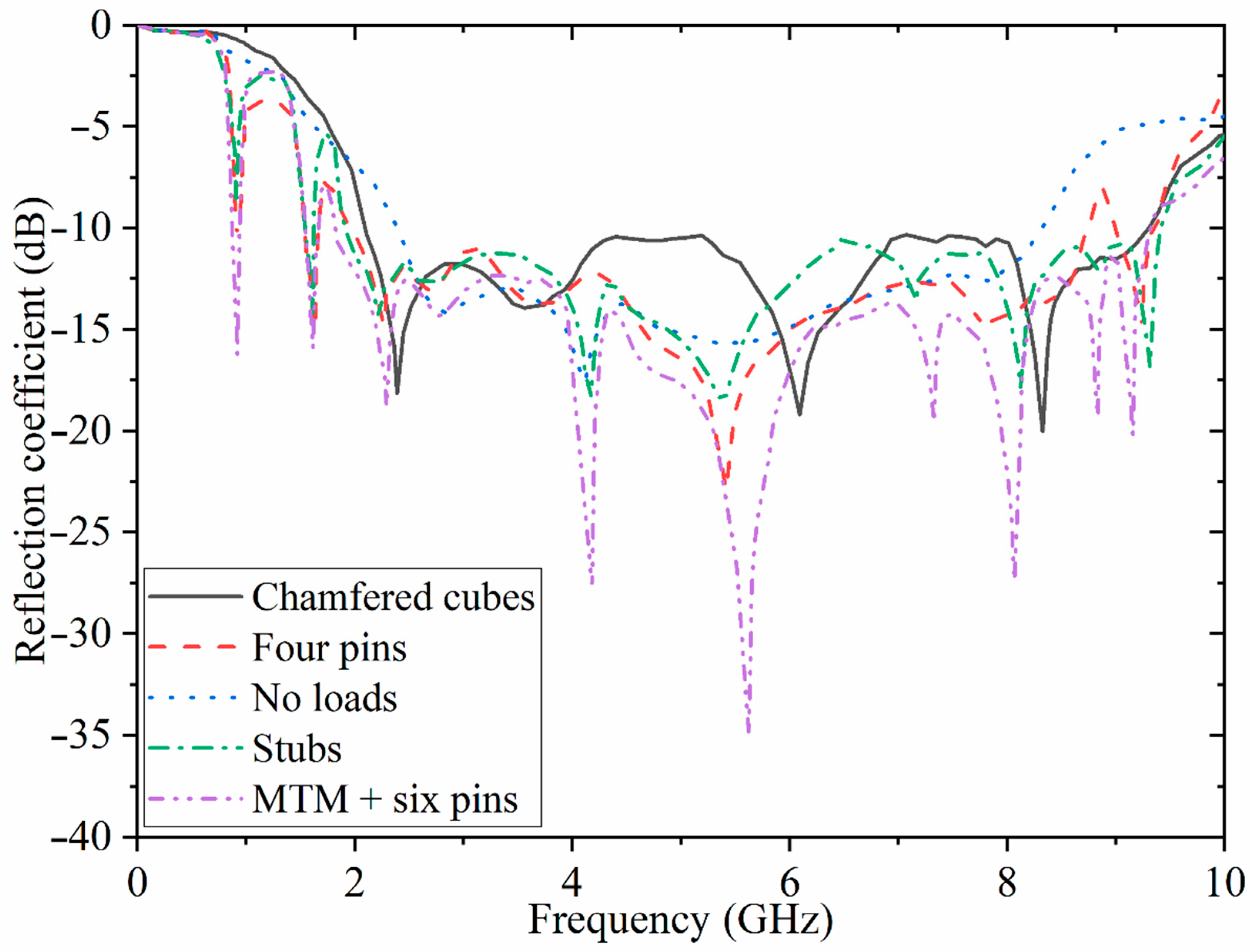
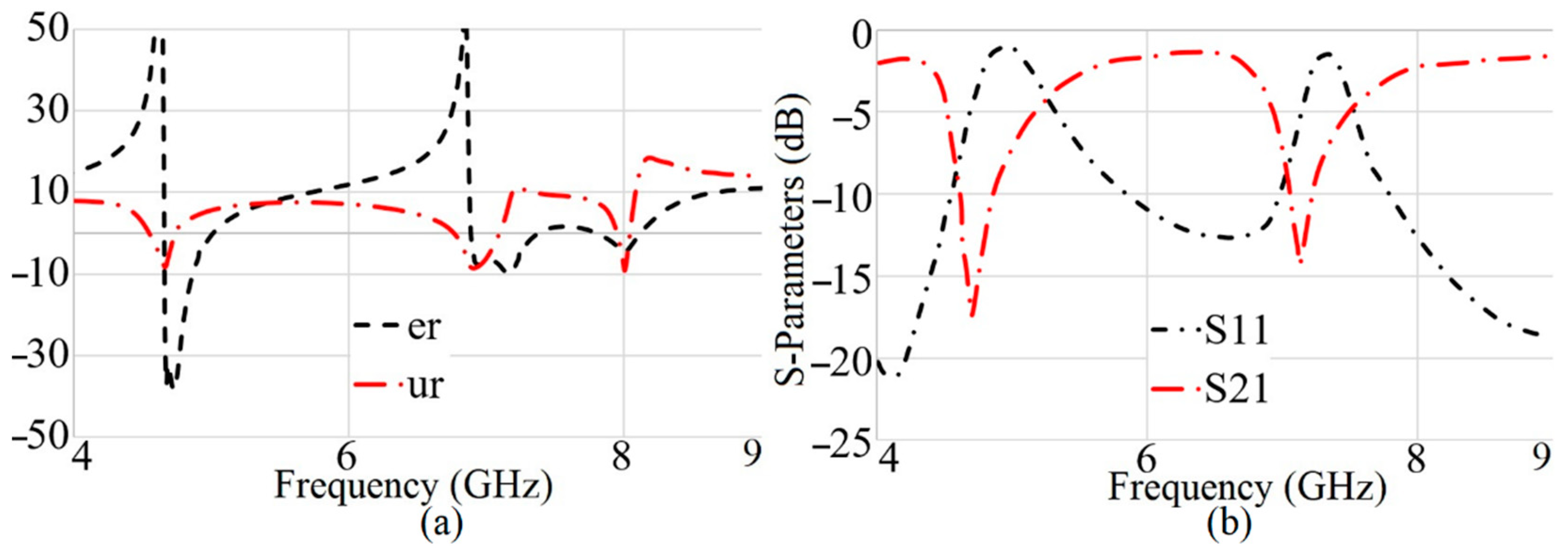
2.2. Antenna’s Performance Improvement Utilizing Periodic SRR Structures
3. Results and Discussion
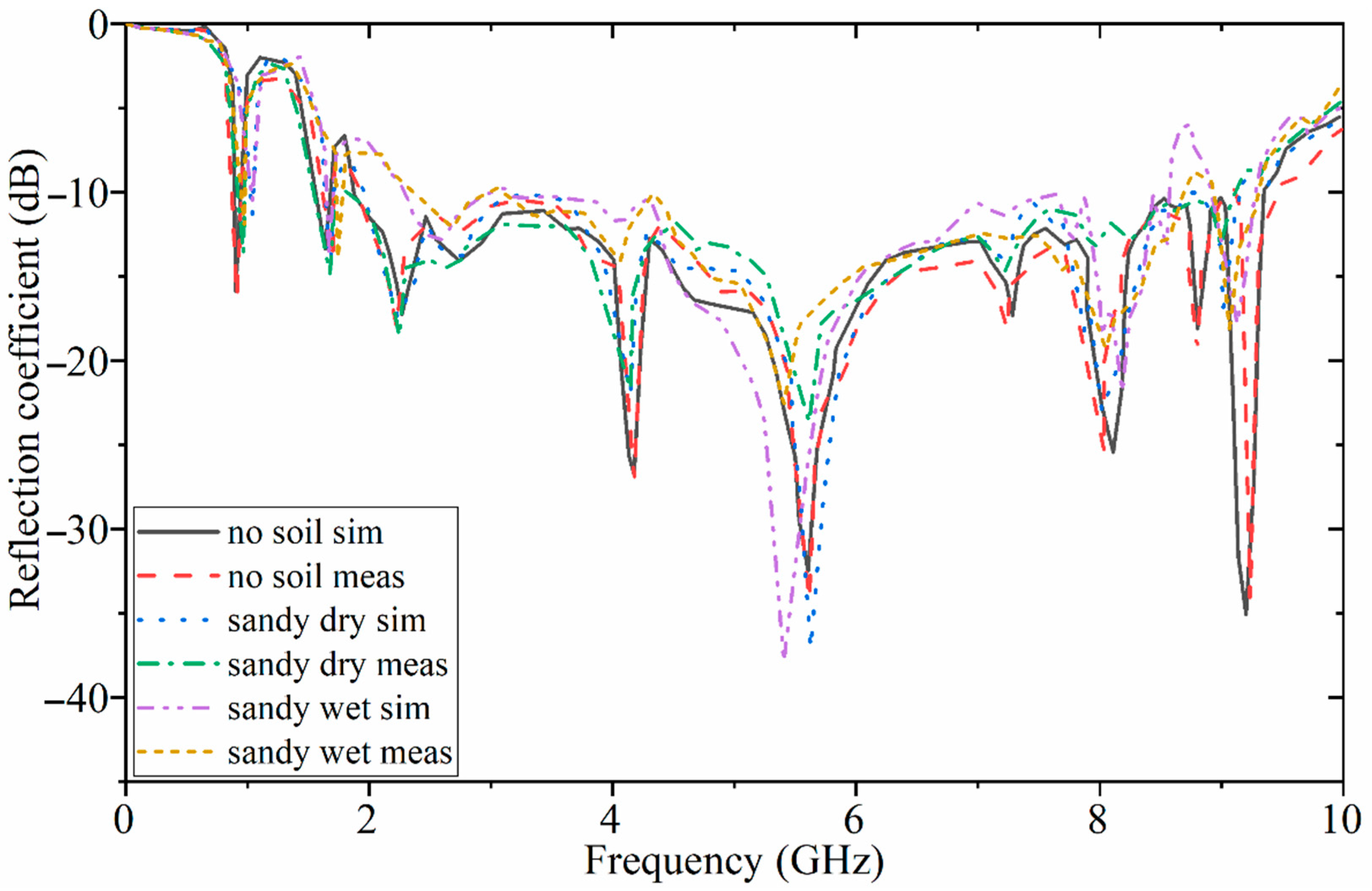
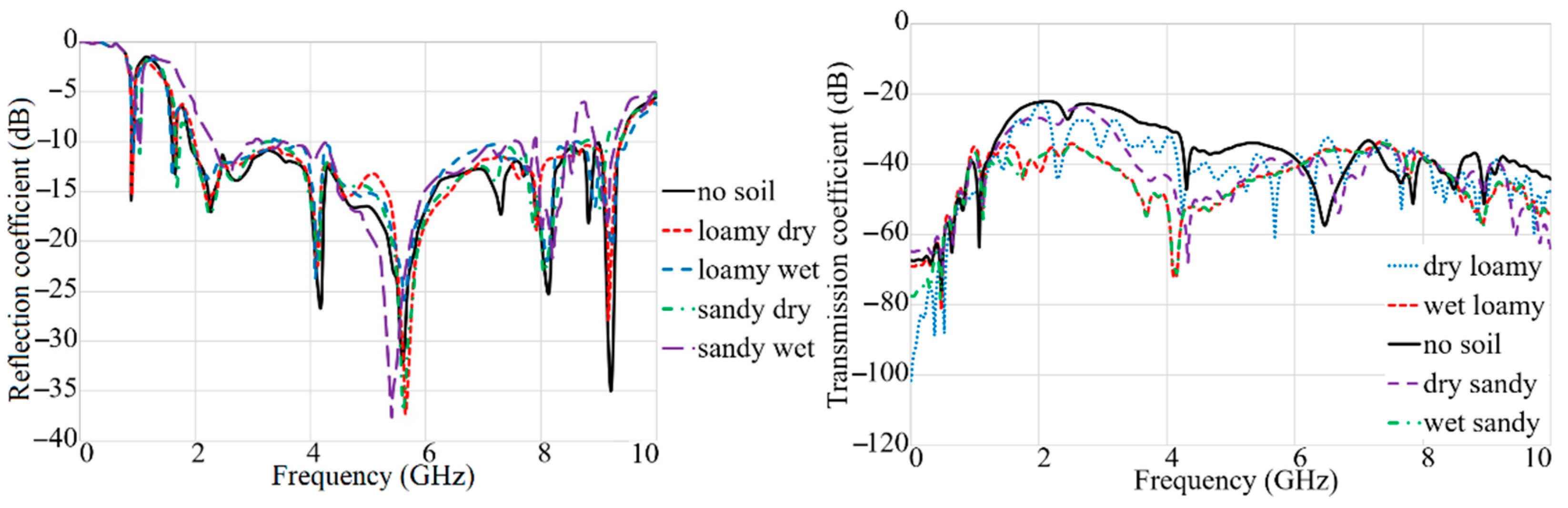
3.1. Antenna Performance Investigations in Various Soils
3.2. Antenna Investigation in Different Levels of Moisture Content of Soil
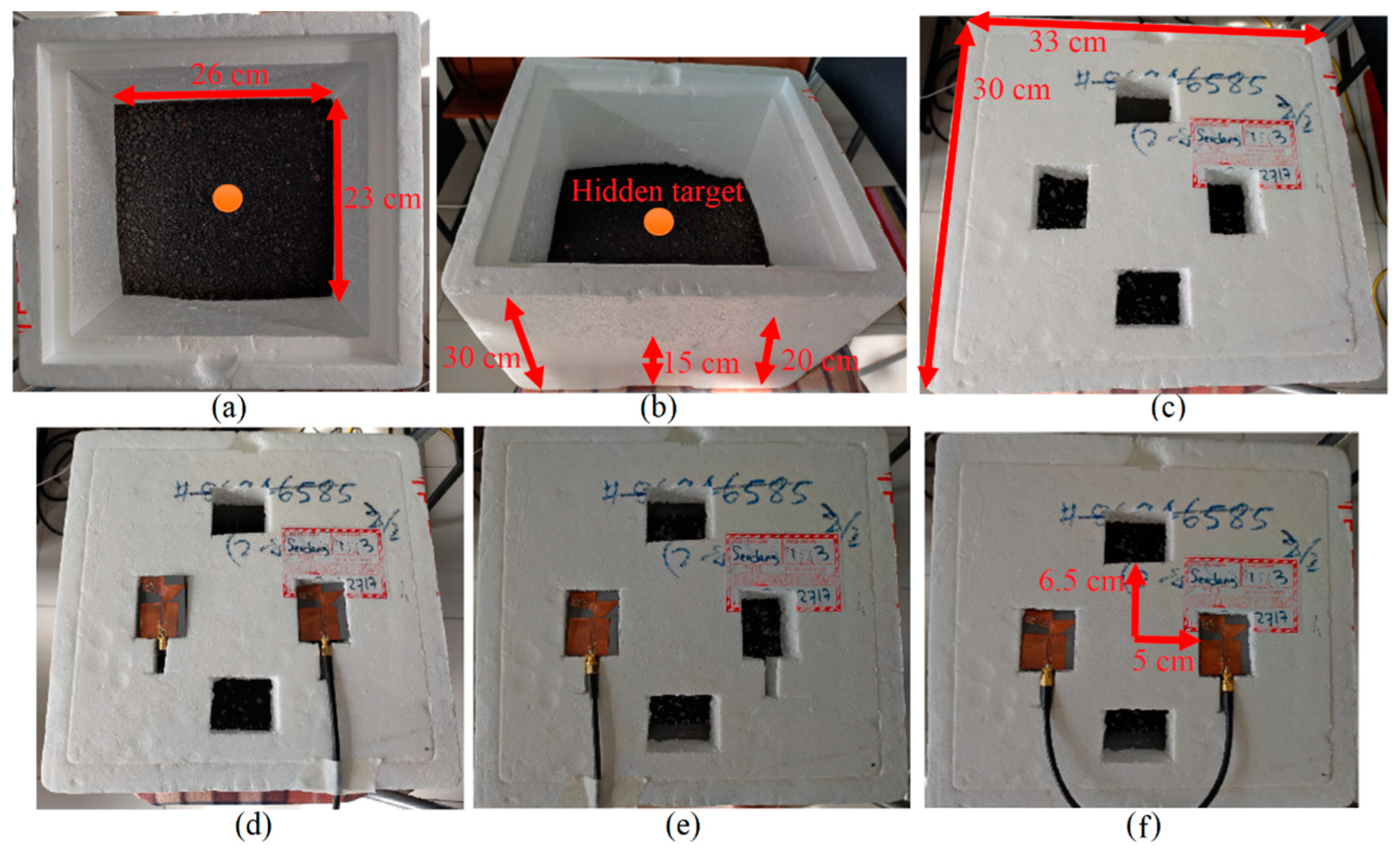
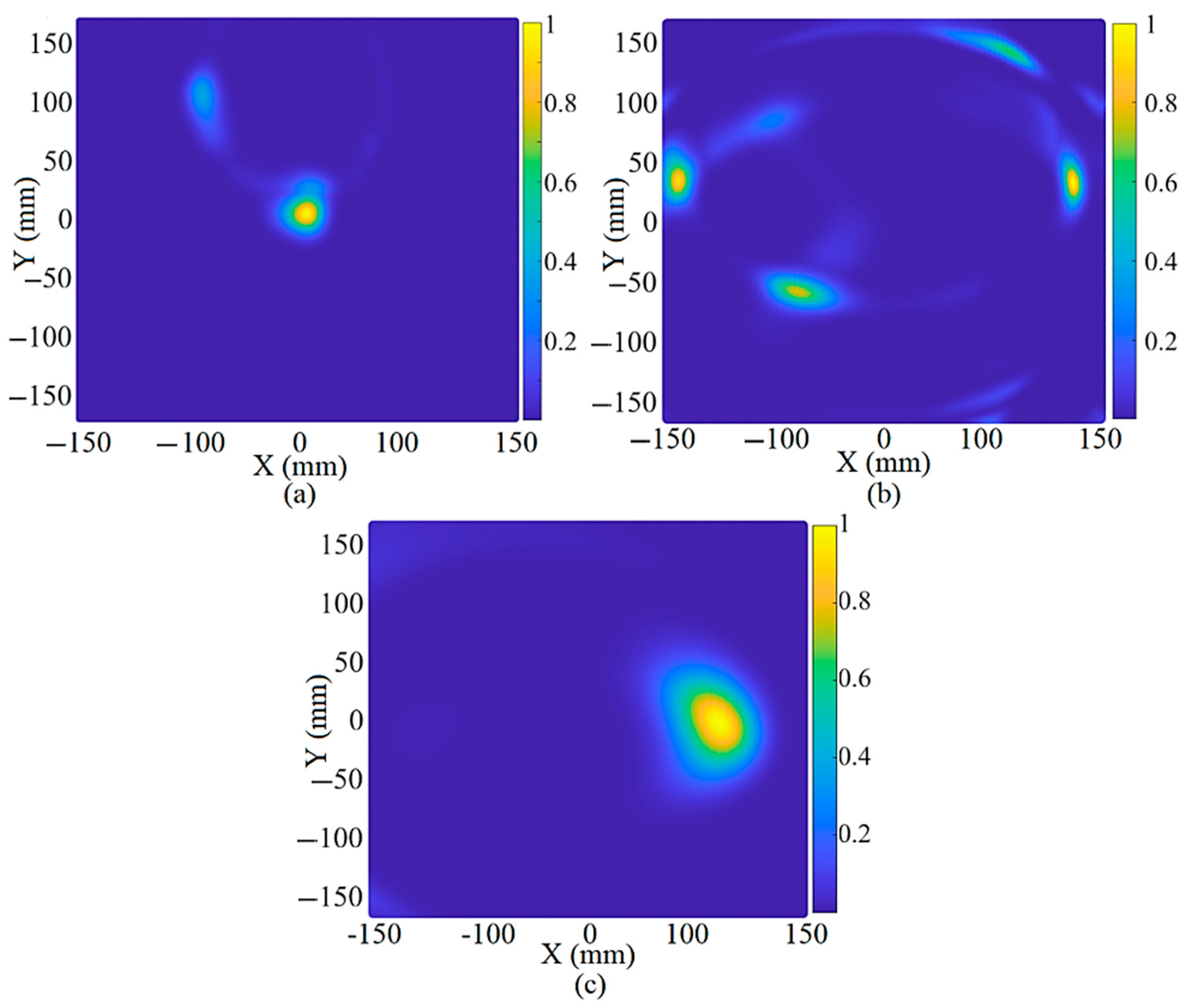
3.3. Antenna Capability for Detection of a Hidden Target in Soil
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zeng, Y.; Guo, C.; Lin, X.; Yang, X. Vivaldi antenna design in millimeter wave band with ultra-wide bandwidth and high gain. In Proceedings of the IEEE MTT-S Workshop Series on Advanced Materials and Processes of RF and THz Applications, Chengdu, China, 20–22 July 2016; pp. 1–3. [Google Scholar]
- Elsheakh, D.N.; Elsadek, H.; Abdallah, E.A. Noninvasive electromagnetic biological microwave testing. In Microwave Systems and Applications; InTech: Munich, Germany, 2017; ISBN 978–953–51-2867-0. [Google Scholar]
- Elsheakh, D.M.N.; Eltresy, N.; Fattah, E.A.A. Ultra-wide bandwidth high gain Vivaldi antenna for wireless communications. Prog. Electromagn. Res. Lett. 2017, 69, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Elsheakh, D. Electromagnetic Band Gap (EBG) Structure for Microstrip Antenna Systems (Analysis and Design). Ph.D. Thesis, Ain Shams University, Faculty of Engineering, Electrical and Communication Department, Cairo, Egypt, 2015. [Google Scholar]
- Liu, H.; Sato, M. In situ measurement of pavement thickness and dielectric permittivity by GPR using an antenna array. NDT E Int. 2014, 64, 65–71. [Google Scholar] [CrossRef]
- Elsheakh, D.M.; Abdallah, E.A. Novel shapes of Vivaldi antenna for ground penetrating radar (GPR). In Proceedings of the 7th European Conference on Antenna and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013; pp. 2886–2889. [Google Scholar]
- Diamanti, N.; Redman, D.; Giannopoulos, A. A study of GPR vertical crack responses in pavement using field data and numerical modelling. In Proceedings of the 13th International Conference on Ground Penetrating Radar (GPR), Lecce, Italy, 21–25 June 2010. [Google Scholar]
- Liu, Y.; Wang, M.; Cai, Q. The target detection for GPR images based on curve fitting. In Proceedings of the 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; pp. 2876–2879. [Google Scholar]
- Elsheakh, D.N.; Abdallah, E.A. Compact ultra-wideband Vivaldi antenna for ground-penetrating radar detection applications. Microw. Opt. Technol. Lett. 2019, 61, 1268–1277. [Google Scholar] [CrossRef]
- Nayak, R.; Maiti, S.; Patra, S.K. Design, and simulation of compact UWB bow-tie antenna with reduced end-fire reflections for GPR applications. In Proceedings of the 2016 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 21–23 March 2016; pp. 1786–1790. [Google Scholar]
- Leng, Z.; Al-Qadi, I.L. An innovative method for measuring pavement dielectric constant using the extended CMP method with two airs coupled GPR systems. NDT & E Int. 2014, 66, 90–98. [Google Scholar]
- Cigno, E.; Magagnoli, C.; Pierce, M.; Iglesias, P. High gain UWB bow-tie antenna design for ground penetrating radar application. Microw. Opt. Technol. Lett. 2018, 60, 2420–2425. [Google Scholar] [CrossRef]
- Saeidi, T.; Ismail, I.; Wen, W.P.; Alhawari, A.R.H.; Mohammadi, A. Ultra-Wideband Antennas for Wireless Communication Applications. Int. J. Antennas Propag. 2019, 2019, 1–25. [Google Scholar] [CrossRef]
- Saeidi, T.; Ismail, I.; Alhawari, A.R.H.; Wen, W.P. Near-field and far-field investigation of miniaturized UWB antenna for imaging of wood. AIP Adv. 2019, 9, 035232. [Google Scholar] [CrossRef] [Green Version]
- Alhawari, A.R.H.; Almawgani, A.H.M.; Hindi, A.T.; Alghamdi, H.; Saeidi, T. Metamaterial-based wearable flexible elliptical UWB antenna for WBAN and breast imaging applications. AIP Adv. 2021, 11, 015128. [Google Scholar] [CrossRef]
- Ranga, Y.; Esselle, K.P.; Matekovits, L.; Hay, S.G. Increasing the gain of a semicircular slot UWB antenna using an FSS reflector. In Proceedings of the 2012 IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Cape Town, South Africa, 2–7 September 2012; pp. 478–481. [Google Scholar]
- Chakrabarti, N.; Kalra, S.; Saxena, S. Tripathy MR. Ultra-wideband antenna for a ground penetrating radar. In Proceedings of the 2016 Thirteenth International Conference on Wireless and Optical Communications Networks (WOCN), Hyderabad, India, 21–23 July 2016; pp. 1–6. [Google Scholar]
- Badhai, R.K.; Gupta, N. Reduced size bow-tie slot monopole antenna for land mine detection. Microw. Opt. Technol. Lett. 2009, 52, 122–125. [Google Scholar] [CrossRef]
- Moosazadeh, M.; Kharkovsky, S. Development of the antipodal Vivaldi antenna for detection of cracks inside concrete members. Microw. Opt. Technol. Lett. 2015, 57, 1573–1578. [Google Scholar] [CrossRef]
- Sagnard, F.; Rejiba, F. Wide band coplanar waveguide-fed bow-tie slot antenna for a large range of ground penetrating radar applications. IET Microw. Antennas Propag. 2011, 5, 734–739. [Google Scholar] [CrossRef]
- Hertl, I.; Strycek, M. UWB antennas for ground penetrating radar application. In Proceedings of the 19th International Conference on Applied Electromagnetics and Communications, Dubrovnik, Croatia, 24–26 September 2007; pp. 1–4. [Google Scholar]
- Elsheakh, D.M.; Abdallah, E.A. Compact printed log-periodic dipole antenna for water detection by using ground penetrating radar. Microw. Opt. Technol. Lett. 2014, 56, 1225–1232. [Google Scholar] [CrossRef]
- Available online: https://www.raypcb.com/rogers-rt-duroid-5880/#:~:text=The%20price%20tag%20is%20reasonable,high%2Dfrequency%20and%20broadband%20applications (accessed on 6 June 2017).
- Available online: https://www.raypcb.com/ (accessed on 6 June 2017).
- Guan, C.-E.; Fujimoto, T. Design of a Wideband L-Shape Fed Microstrip Patch Antenna Backed by Conductor Plane for Medical Body Area Network. Electronics 2020, 9, 21. [Google Scholar] [CrossRef] [Green Version]
- Chaurasia, R.K.; Mathur, V.; Mishra, R.; Mishra, R.G. Effect of the dimension of feedline for the enhancement of bandwidth of square microstrip antenna. In Intelligent Communication, Control and Devices, Advances in Intelligent Systems and Computing 624; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Mohan, K.N.; Reddy, K.H. Effective Microstrip Feed Line Length in Ultra-Wideband Responses and Wireless Applications. J. Physics Conf. Ser. 2021, 1804, 012163. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, L. Gain-Enhanced Patch Antennas with Loading of Shorting Pins. EEE Trans. Antennas Propag. 2016, 64, 3310–3318. [Google Scholar] [CrossRef]
- Liu, N.; Chen, X.; Zhu, L.; Liu, Z.; Fu, G. Gain-Enhanced Patch Antenna without Enlarged Size via Loading of Slot and Shorting Pins. IEEE Trans. Antennas Propag. 2017, 65, 5702–5709. [Google Scholar]
- Liu, N.W.; Chen, X.P.; Zhu, L.; Liu, Z.X.; Fu, G. Compact dielectric resonator antenna with bandwidth enhancement via loading of shorting pins. IET Microwaves, Antennas Propag. 2019, 13, 1969–1973. [Google Scholar] [CrossRef]
- Kundu, S.; Chatterjee, A. Sharp Triple-Notched Ultra-Wideband Antenna with Gain Augmentation Using FSS for Ground Penetrating Radar. Wirel. Pers. Commun. 2020, 117, 1399–1418. [Google Scholar] [CrossRef]
- Al-Gburi, A.J.A.; Ibrahim, I.M.; Zakaria, Z.; Abdulhameed, M.K.; Saeidi, T. Enhancing Gain for UWB Antennas Using FSS: A Systematic Review. Mathematics 2021, 9, 3301. [Google Scholar] [CrossRef]
- Alhawari, A.R.H.; Saeidi, T.; Almawgani, A.H.M.; Hindi, A.T.; Alghamdi, H.; Alsuwian, T.; Awwad, S.A.B.; Imran, M.A. Wearable Metamaterial Dual-Polarized High Isolation UWB MIMO Vivaldi Antenna for 5G and Satellite Communications. Micromachines 2021, 12, 1559. [Google Scholar] [CrossRef]
- Ojaroudi, M.; Jahed, H. High-Resolution Ultra-Wideband Material Penetrating Radar (UWB-MPR) using Modified Configuration of Receiver Antennas. ACES J. 2018, 33, 407–412. [Google Scholar]
- Tahar, Z.; Dérobert, X.; Benslama, M. An Ultra-Wideband Modified Vivaldi Antenna Applied to Ground and Through the Wall Imaging. Prog. Electromagn. Res. C 2018, 86, 111–122. [Google Scholar] [CrossRef] [Green Version]
- Biancheri-Astier, M.; Diet, A.; Le Bihan, Y.; Grzeskowiak, M. UWB Vivaldi Antenna Array Lower Band Improvement for Ground Penetrating Radar Applications. Radioengineering 2019, 27, 92–98. [Google Scholar] [CrossRef]
- Wu, Y.; Shen, F.; Yuan, Y.; Xu, D. An Improved Modified Universal Ultra-Wideband Antenna Designed for Step Frequency Continuous Wave Ground Penetrating Radar System. Sensors 2019, 19, 1045. [Google Scholar] [CrossRef] [Green Version]
- Widyananda, R.; Nur, L.O.; Wijanto, H. Design of Ultra-Wide-Band Bowtie Antenna for GPR Applications. In Proceedings of the 2nd Faculty of Industrial Technology International Congress International Conference Bandung, Indonesia, 28–30 January 2020. [Google Scholar]
- Karamzadeh, S.; Kılıç, O.F.; Demirbaş, F.; Hepbiçer, A.S. Frequency Independent Self Complementary Bow Tie Antenna Design for GPR Applications. Appl. Sci. Eng. 2017, 18, 131–138. [Google Scholar] [CrossRef] [Green Version]
- Ajith, K.K.; Bhattacharya, A. A Novel Compact Super wide band Bowtie Antenna for 420 MHz to 5.5 GHz Operation. IEEE Trans. Antennas. Propag. 2018, 66, 3830–3836. [Google Scholar] [CrossRef]
- Raza, A.; Lin, W.; Ishfaq, M.K.; Inam, M.; Masud, F.; Dahri, M.H. A Wideband Reflector-Backed Antenna for Applications in GPR. Int. J. Antennas Propag. 2021, 2021, 3531019. [Google Scholar] [CrossRef]
- Mohanna, M.M.; Abdallah, E.A.; Elhennawy, H.M.; Kamel, M.M. A Novel High Directive Willis-Sinha Tapered Slot Antenna for GPR Application in Detecting Landmine. Prog. Electromagn. Res. C 2018, 80, 181–198. [Google Scholar]
- Africano, M.; Vargas, J.O.; Adriano, R.; Oliveira, D.B.; Lisboa, A.C. Ground Penetrating Radar Antenna Design for Homogeneous and Low Loss Dielectric Multilayer Media. J. Microw. Optoelectron. Electromagn. Appl. 2020, 19, 137–151. [Google Scholar] [CrossRef]
- Rajesh Mohan, R.; Binu Paul, S.; Mridula, P.; Mohanan, P. Measurement of soil moisture content at microwave frequencies. Proc. Comput. Sci. 2015, 46, 1238–1245. [Google Scholar] [CrossRef] [Green Version]
- Saeidi, T.; Ismail, I.; Mahmood, S.N.; Alani, S.; Alhawari, A.R.H. Microwave Imaging of Voids in Oil Palm Trunk Applying UWB Antenna and Robust Time-Reversal Algorithm. J. Sens. 2020, 2020, 8895737. [Google Scholar] [CrossRef]
- Mukherjee, S.; Tamburrino, A.; Haq, M.; Udpa, S.; Udpa, L. Far field microwave NDE of composite structures using time reversal mirror. NDT E Int. 2018, 93, 7–17. [Google Scholar] [CrossRef]
- Akıncı, M.N.; Çayören, M.; Akduman, I. Near-field orthogonality sampling method for microwave imaging: Theory and experimental verification. IEEE Trans. Microw. Theory Tech. 2016, 64, 2489–2501. [Google Scholar] [CrossRef]
- Islam, M.M.; Samsuzzaman, M.; Faruque, M.R.I.; Misran, N. Microstrip line-fed fractal antenna with a high-fidelity factor for UWB imaging applications. Microw. Opt. Technol. Lett. 2015, 57, 2580–2585. [Google Scholar] [CrossRef]
- Roggenbuck, M.; Catenacci, J.; Walker, R.; Hanson, E.; Hsieh, J.; Patch, S.K. Thermoacoustic imaging with VHF signal generation: A new contrast mechanism for cancer imaging over large fields of view. In Abdomen and Thoracic Imaging; El-Baz, A., Saba, L., Suri, J., Eds.; Springer: Boston, MA, USA, 2014; pp. 523–557. [Google Scholar]
- Xin, H.; Wang, X.; Qin, T.; Meng, H.; Qin, Y.; Witte, R.S. Time-efficient contrast-enhanced thermoacoustic imaging modality for 3-D breast cancer detection using compressive sensing. In Proceedings of the XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014; pp. 1–2. [Google Scholar]
- Kosmas, P.; Rappaport, C. A matched-filter FDTD based time reversal approach for microwave breast cancer detection. IEEE Trans. Antennas Propag. 2006, 54, 1257–1264. [Google Scholar] [CrossRef]
- Simonov, N.; Son, S.H.; Kim, B.R.; Jeon, S.I. Investigation of Spatial Resolution in a Microwave Tomography System. In Proceedings of the International Conference on Electronics, Information and Communications (ICEIC), Kota Kinabalu, Malaysia, 15–18 January 2014; pp. 305–700. [Google Scholar]
- Li, H.-J.; Liu, T.-Y.; Yang, S.-H. Superhigh Image Resolution for Microwave Imaging. Int. J. Imaging Syst. Technol. 1990, 2, 37–46. [Google Scholar] [CrossRef]
- Simonov, N.A.; Jeon, S.I.; Son, S.H.; Lee, J.M.; Kim, H.J. About Equivalency of Two Methods of Information Gathering in Microwave Imaging; Radio Technology Research Department, ETRI: Daejeon, Korea, 2012. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values (mm) | Parameter | Values (mm) |
|---|---|---|---|
| 50.00 | 10.00 | ||
| 28.80 | 5.40 | ||
| 28.25 | 16.00 | ||
| 28.55 | 8.40 | ||
| 17.75 | 10.00 | ||
| 10.75 | 5.30 | ||
| 4.70 | 4.70 | ||
| 39.5 | 1.5 | ||
| 2.5 | 8.00 | ||
| 8.00 | 19.50 | ||
| 17.85 | 6.70 | ||
| 19.00 | 7.5 | ||
| 3.85 | 1.00 | ||
| 1.5 |
| Ref. | BW (GHz) | Dimensions (mm2) | Gain (dBi) | Applications |
|---|---|---|---|---|
| [9] | 1.75–10 | 120 × 130 | 17 (at 1.1 GHz) | UWB GPR |
| [12] | 0.98–4.5 | 107.7 × 68 | 10.3 (at 3 GHz) | UWB GPR |
| [34] | 1.57–7.04 | 90 × 100 | N/A | UWB-GPR |
| [35] | 1.7–475 | 200 × 100 | 8.39 (at 3 GHz) | UWB, GND, and through-wall imaging |
| [36] | 0.5–4 | 173 × 299 | 7.46 (at 1 GHz) | UWB GPR |
| [37] | 0.64–1.97 | 177.75 × 91.5 | 5.1 (at 1.6 GHz) | UWB GPR |
| [38] | 1.8–2.6 | 50 × 80 | N/A | UWB GPR |
| [39] | 0.45–10 | 240 × 240 | 6.68 (at 0.8 GHz) | UWB GPR |
| [40] | 0.42–5.5 | 172 × 230 | 7.96 (at 4.8 GHz) | UWB GPR |
| This work | 0.9, 1.8, 1.9–9.2 | 50 × 39.5 | 10.8 (at 3 GHz) | UWB GPR |
| Ref. | Dimensions (mm2) | Max Gain (dBi) | BW (GHz) | Examined Material and Thickness (cm) |
|---|---|---|---|---|
| [9] | 130 × 120 | 17 | 0.25–10 | Soil (100) |
| [12] | 107.7 × 68 | 10.3 | 0.98–4.5 | Soil, 12 |
| [41] | 180 × 220 × 50 | 7 | 0.6–4.6 | Sandy soil (N/A) |
| [42] | 235 × 270 | <8 | 0.18–6.2 | - |
| [43] | 78.5 × 47.9 | <9 | 3.2 | Asphalt, base, sub-grade (max 30 cm) |
| Proposed antenna | 50 × 39.5 | 10.8 | 0.9, 1.8, 1.9–9.2 | Loamy soil (wet and dry), sandy soil (wet and dry) (max 50) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeidi, T.; Alhawari, A.R.H.; Almawgani, A.H.M.; Alsuwian, T.; Imran, M.A.; Abbasi, Q. High Gain Compact UWB Antenna for Ground Penetrating Radar Detection and Soil Inspection. Sensors 2022, 22, 5183. https://doi.org/10.3390/s22145183
Saeidi T, Alhawari ARH, Almawgani AHM, Alsuwian T, Imran MA, Abbasi Q. High Gain Compact UWB Antenna for Ground Penetrating Radar Detection and Soil Inspection. Sensors. 2022; 22(14):5183. https://doi.org/10.3390/s22145183
Chicago/Turabian StyleSaeidi, Tale, Adam R. H. Alhawari, Abdulkarem H. M. Almawgani, Turki Alsuwian, Muhammad Ali Imran, and Qammer Abbasi. 2022. "High Gain Compact UWB Antenna for Ground Penetrating Radar Detection and Soil Inspection" Sensors 22, no. 14: 5183. https://doi.org/10.3390/s22145183
APA StyleSaeidi, T., Alhawari, A. R. H., Almawgani, A. H. M., Alsuwian, T., Imran, M. A., & Abbasi, Q. (2022). High Gain Compact UWB Antenna for Ground Penetrating Radar Detection and Soil Inspection. Sensors, 22(14), 5183. https://doi.org/10.3390/s22145183