
An Ultrasonic Tomography System for the Inspection of Columns in Architectural Heritage

 ,
,  ,
,
Abstract
:1. Introduction
2. Ultrasonic Tomography System
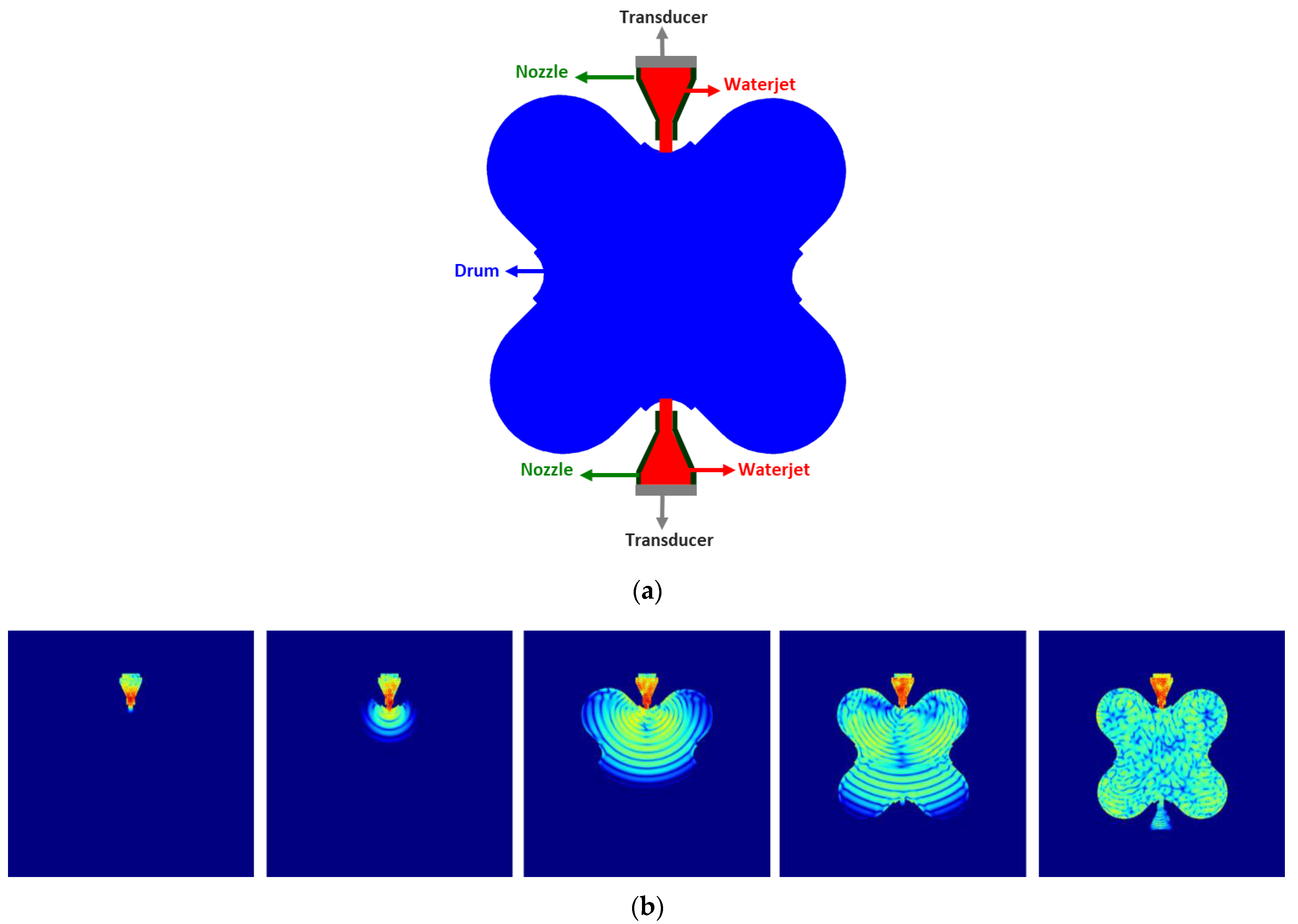
2.1. Initial Considerations for the Design of the Ultrasonic Transmission System
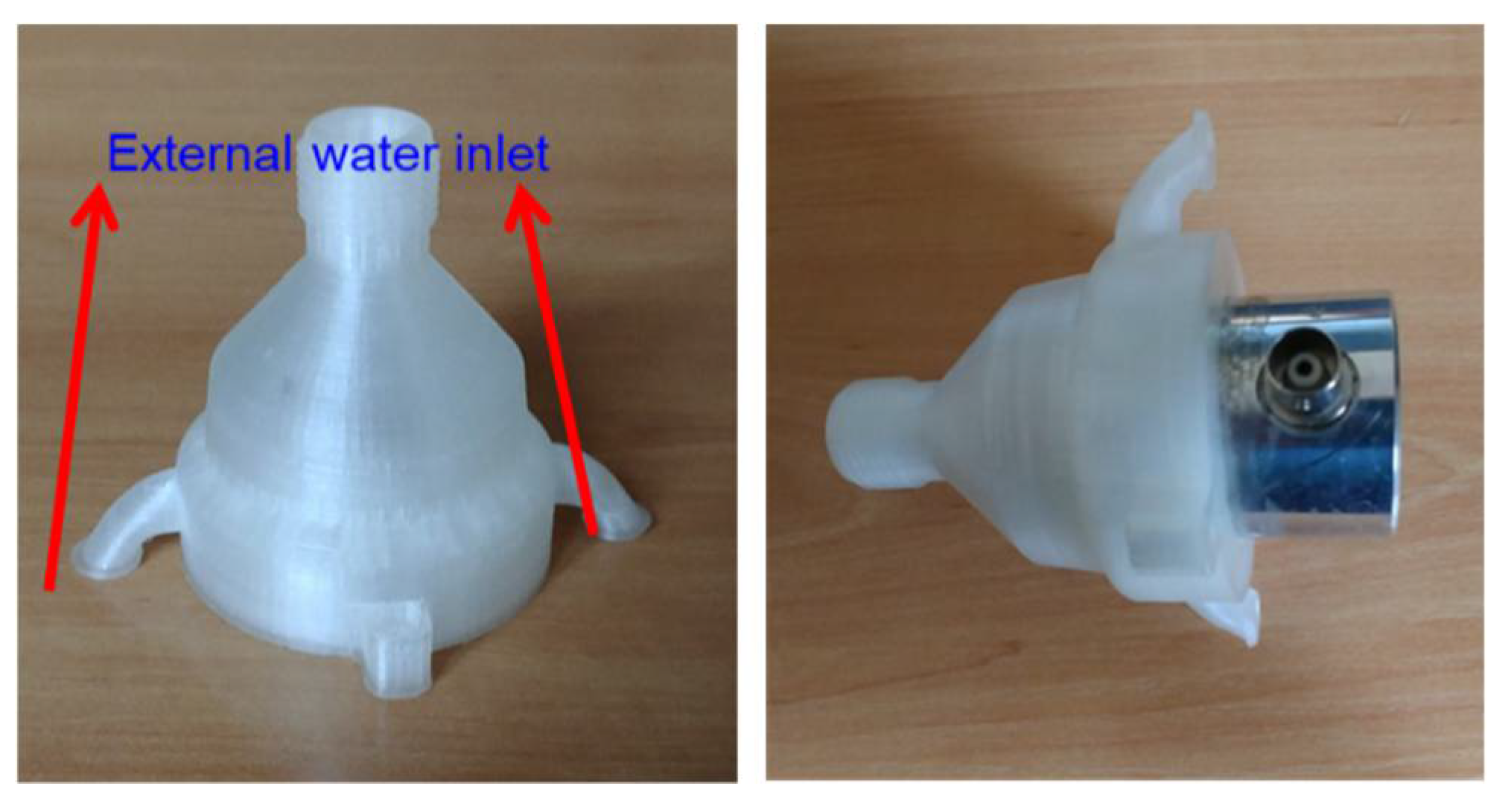
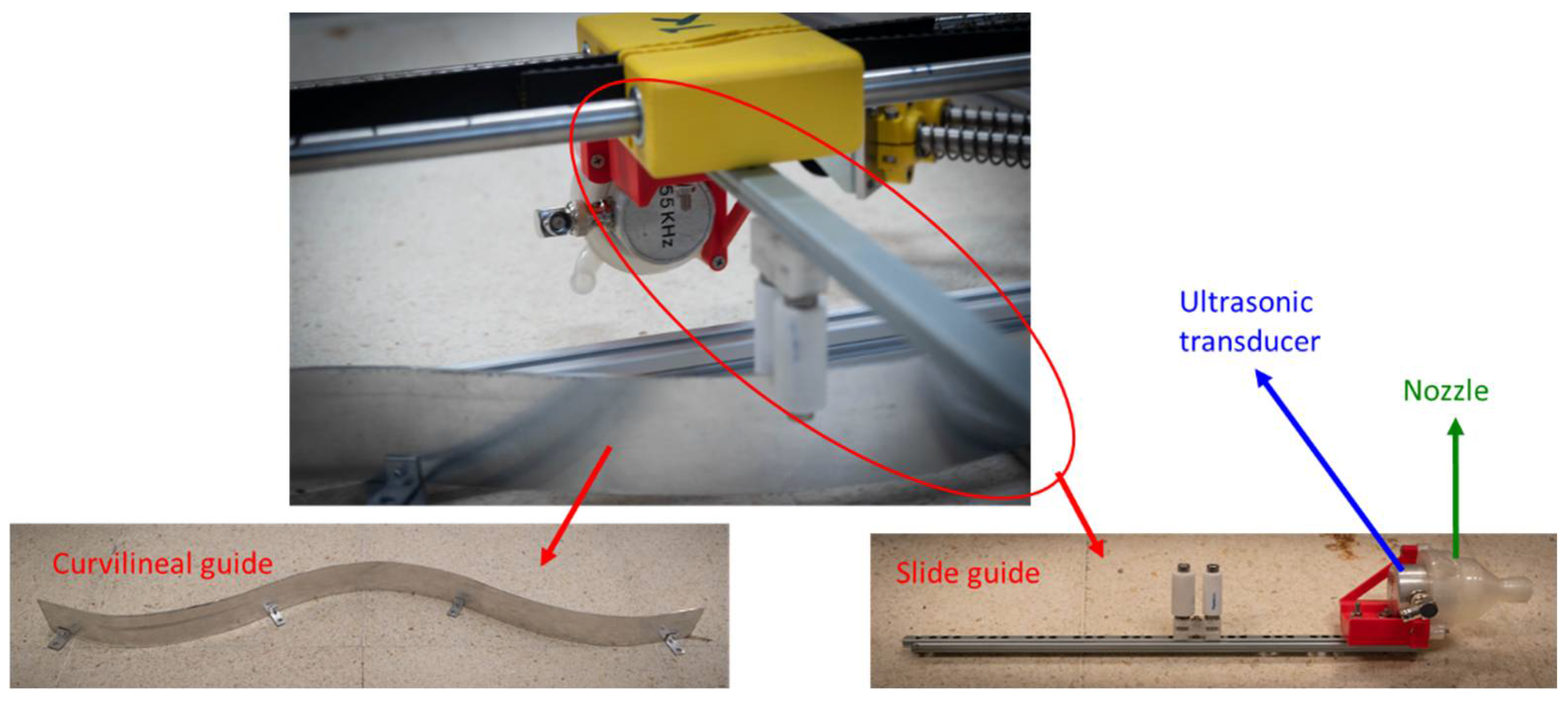
2.2. Mechanical System
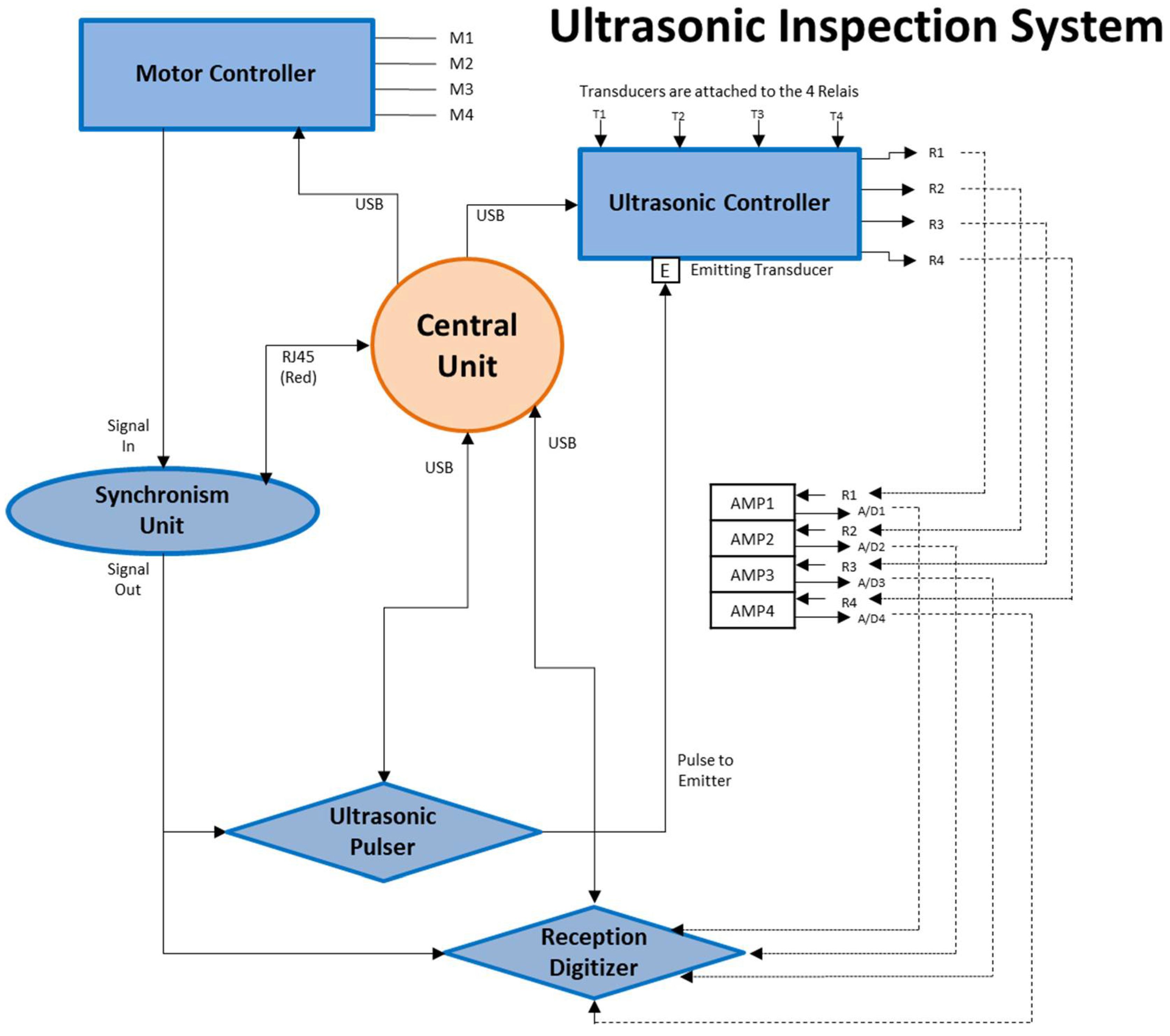
2.3. Electronic System
- (1)
- Motor controller. This is the system that goes along with the mechanical system of movement around the column. This system comprises an Arduino Uno with a CNC-Shield mounted with 4 stepper motor driver chips mounted on top of it. The stepper motor used has 4 cables connected to it (2 per coil). It can drive 3 independent axes (X, Y, Z) and a slave axis (A). The movement of the A-axis is configured with two jumpers. A circuit board with 2 relays is attached to change the configuration jumpers automatically. Finally another pin on this board is responsible to send a signal to the synchronism unit to initialize the ultrasonic pulse sequence.
- (2)
- Ultrasonic controller. This system is responsible for the configuration of each transducer as transmitter or receiver automatically. Four signal switches are used to make this selection. In this way, each transducer can be connected to a pulse emitter, if it acts as an emitter, or to one of the 4 preamplifiers, if it acts as a receiver. As preamplifiers, the Olympus Model 5662 with 54 dB of gain was used.
- (3)
- Ultrasonic pulser. As a pulse emitter, one based on the IC STHV748S was used. It was programmed with a burst of 5 pulses of 50 kHz and ±100 V amplitude.
- (4)
- Synchronism unit. This system, developed by the authors, will be in charge of the synchronism between the movement of the motors and the ultrasound [23]. The system has a SYNC IN input, a SYNC OUT output, and a network cable through which it connects to the central unit to program the sync sequence. The SYNC IN input comes from the motor controller and the SYNC OUT signal is the one that goes to the ultrasonic pulser and the reception digitizer.
- (5)
- Reception digitizer. The TiePie oscilloscope model HS6diff of four channels was used. It works digitally with a software client on a computer via USB connection. The visualization and the oscilloscope settings can be changed using this desktop client. This oscilloscope will be used to gather the data of the amplified waves of the three receiving transducers.
3. Processing of the Ultrasonic Tomography Information
- Extraction of ultrasonic information from raw captured data
- Generation of the tomographic image
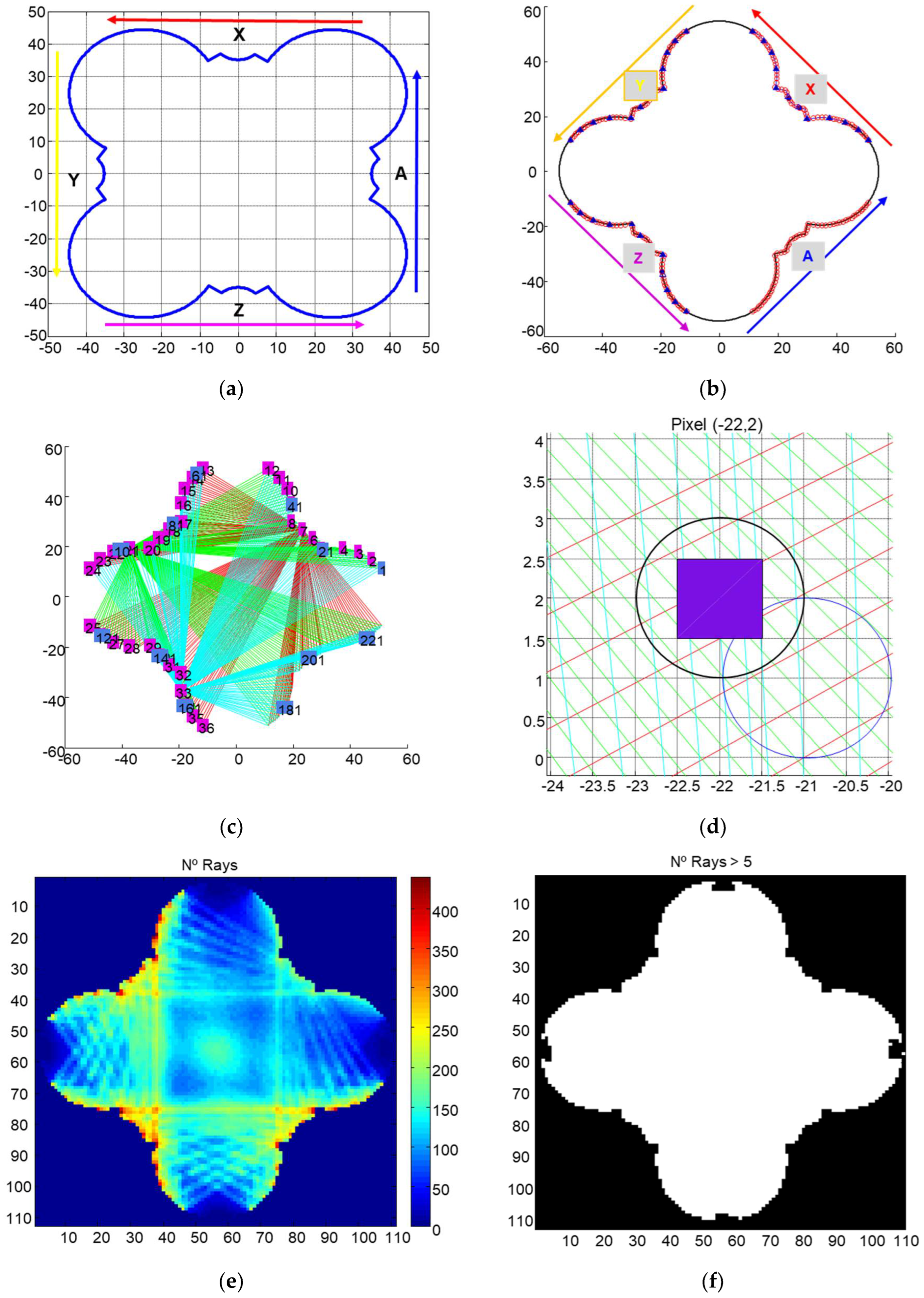
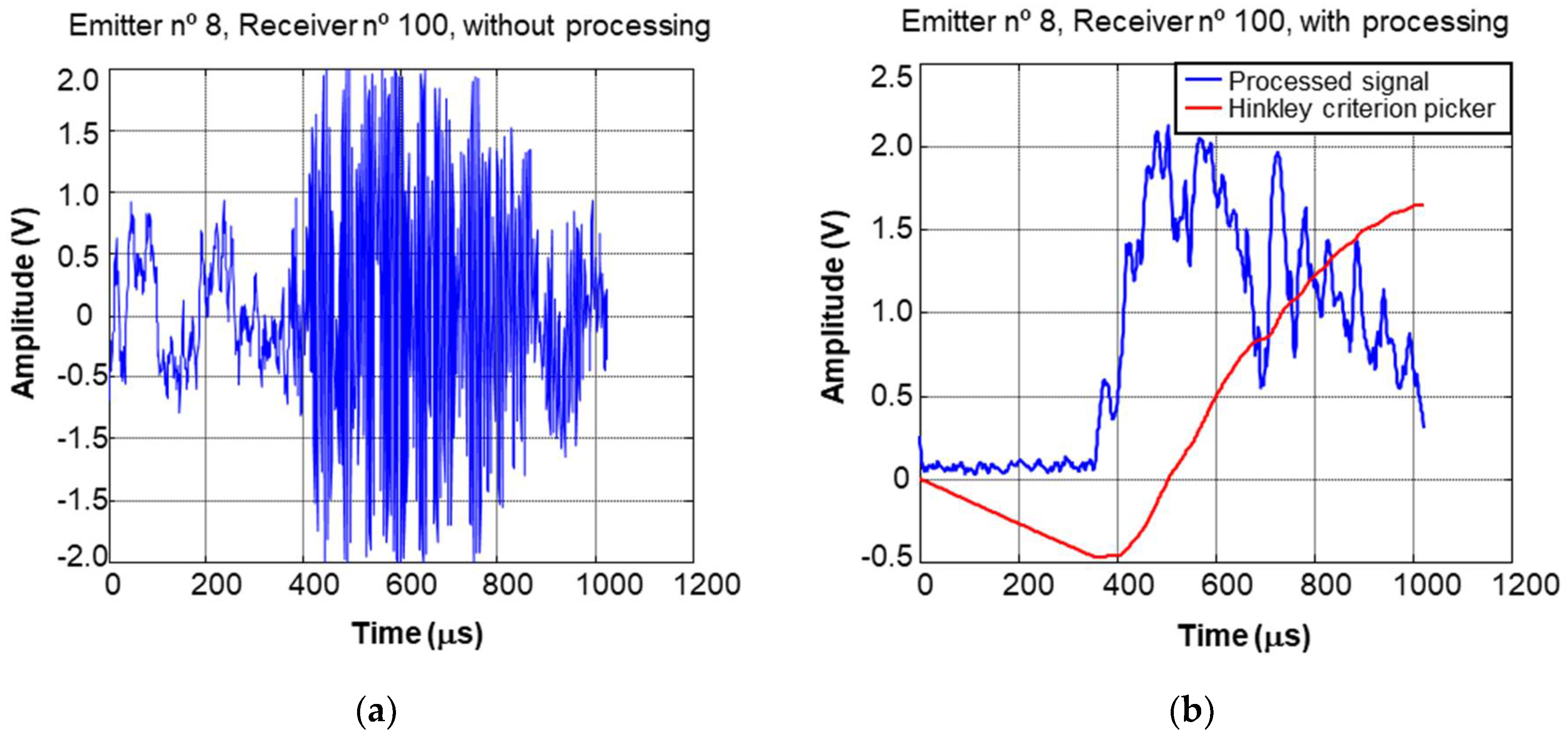
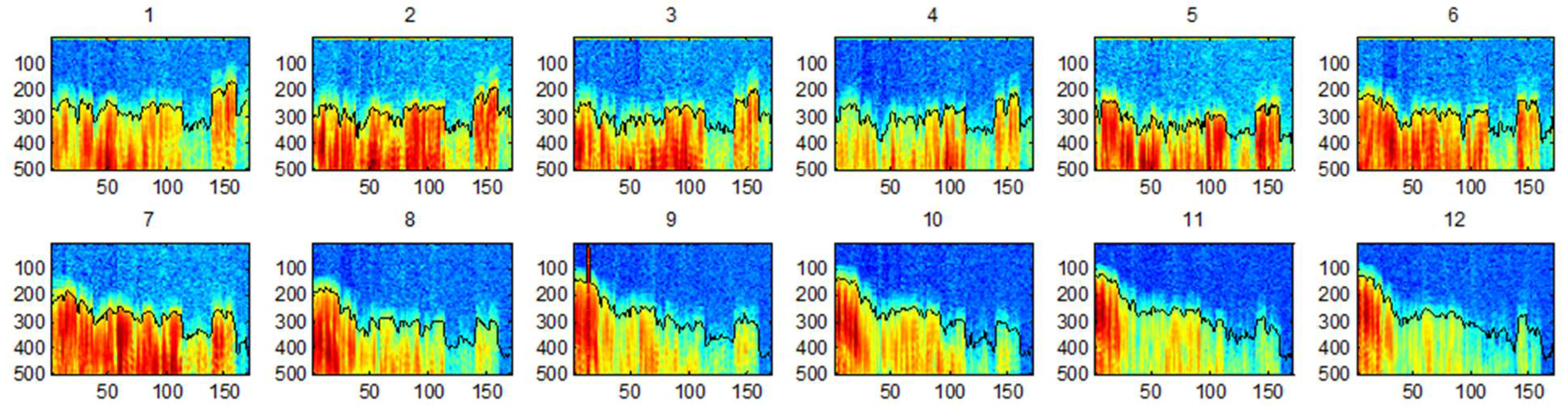
3.1. Extraction of Ultrasonic Information from Raw Captured Data
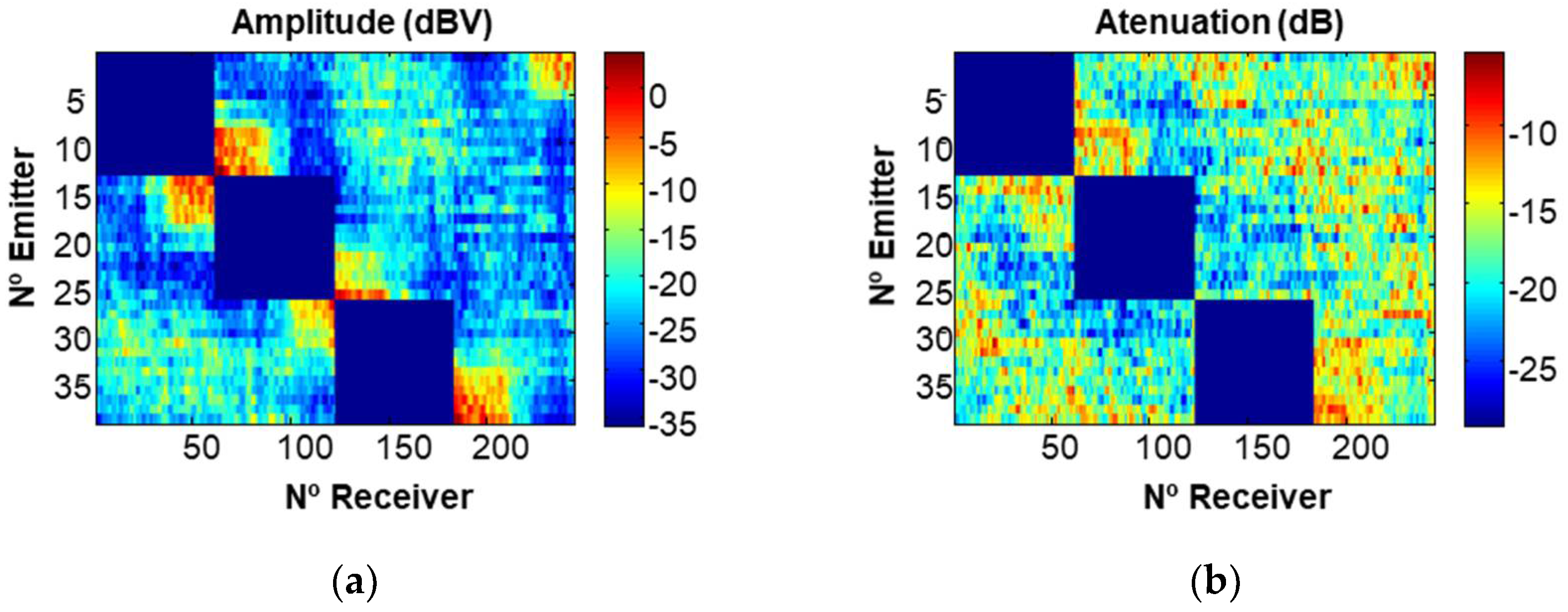
3.2. Generation of the Tomographic Image
4. Results Obtained in Convent of Carmo
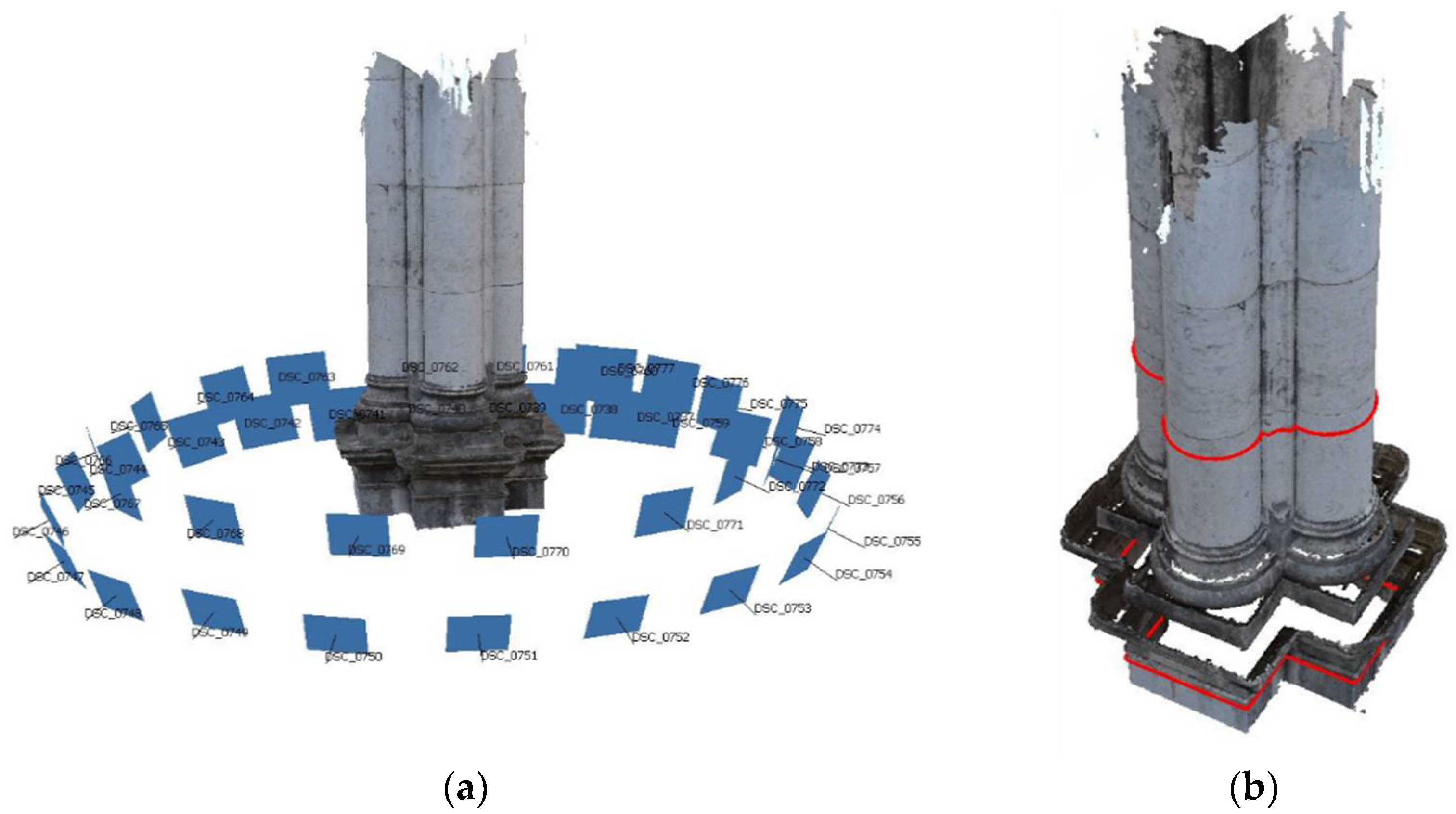
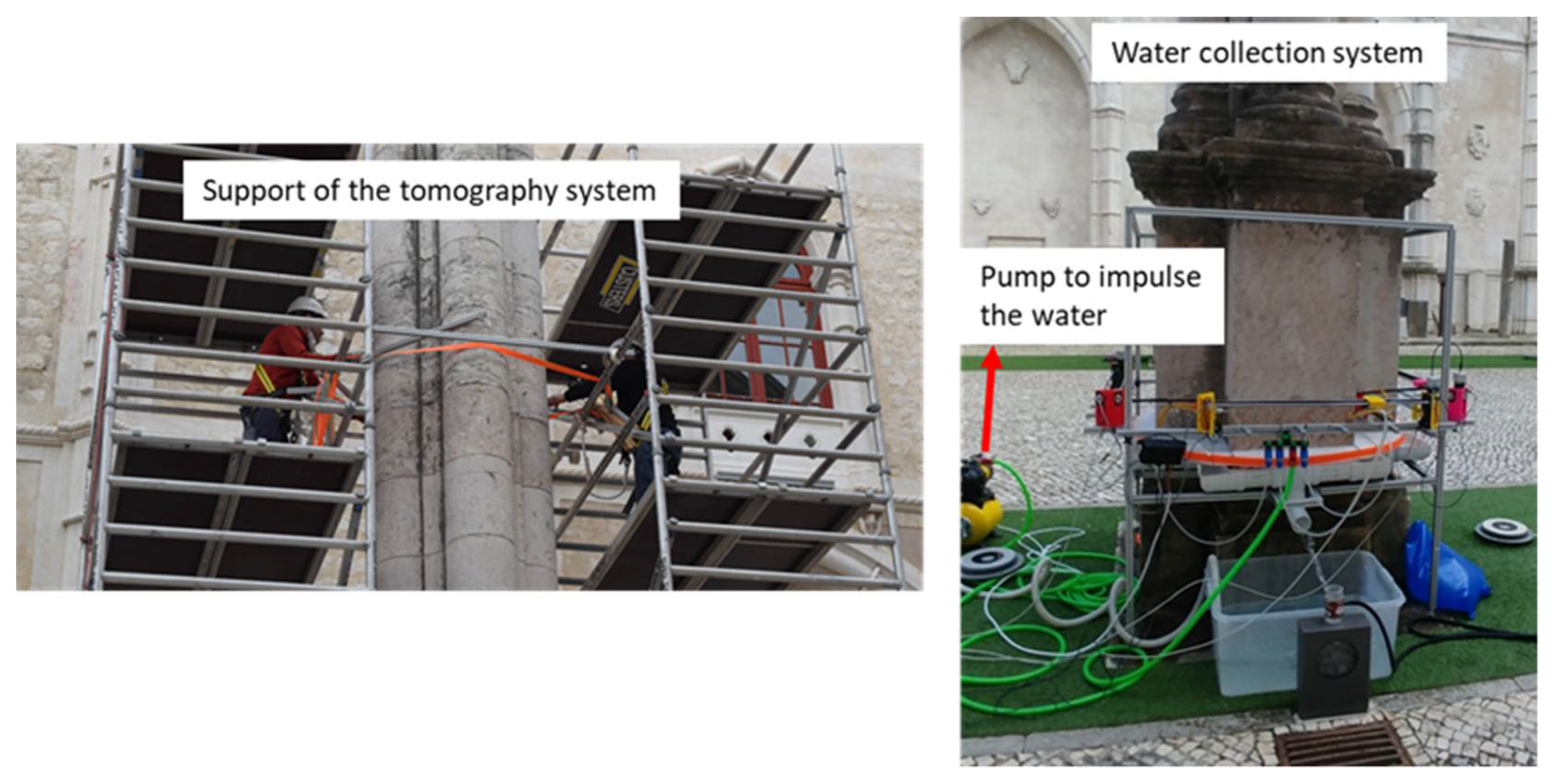
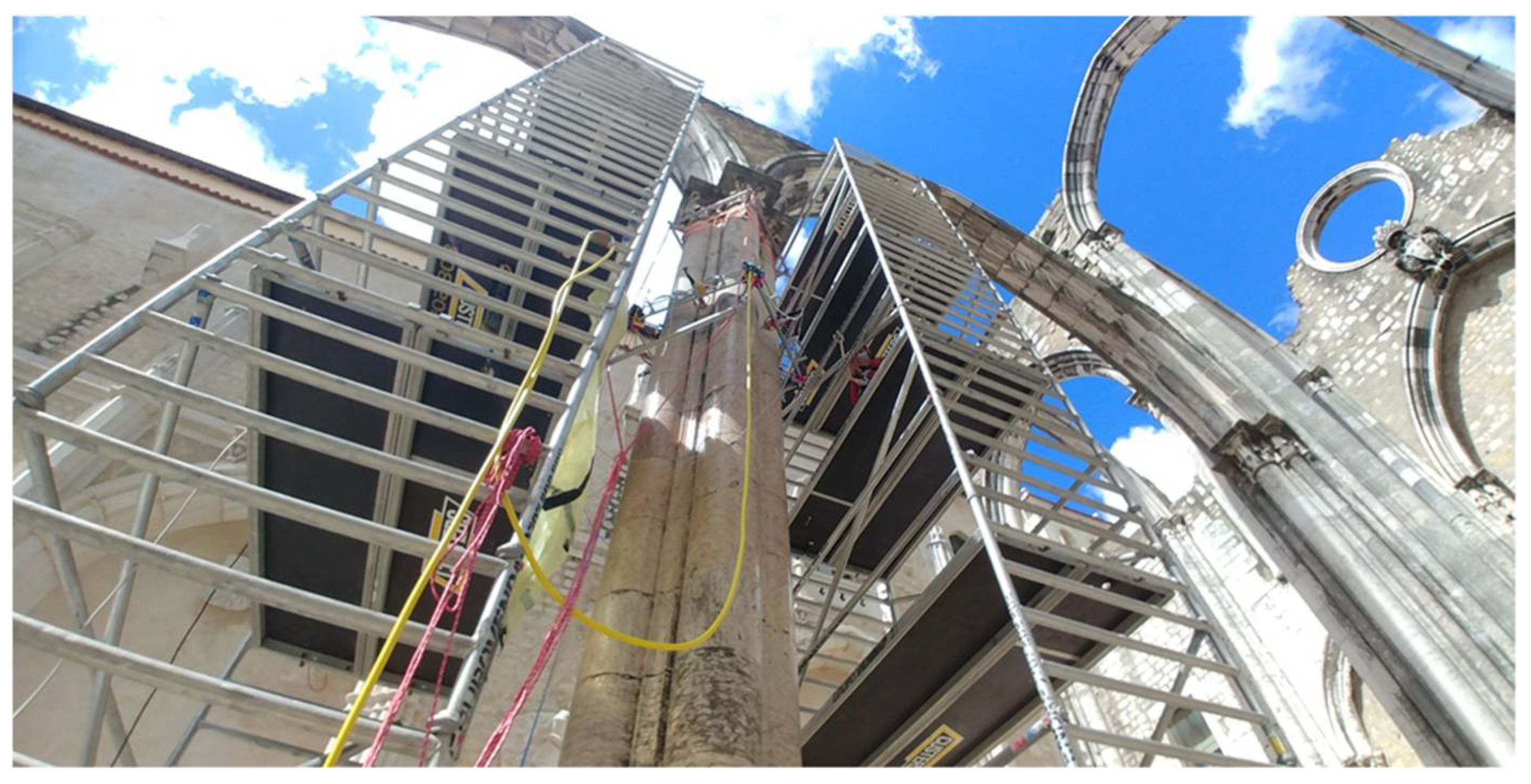
4.1. Case Study: Columns of the Convent Do Carmo
4.2. Results Obtained in Convent of Carmo
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Binda, L.; Saisi, A.; Tiraboschi, C. Investigation procedures for the diagnosis of historic masonries. Constr. Build. Mater. 2000, 14, 199–233. [Google Scholar] [CrossRef]
- Pallarés, F.; Betti, M.; Bartoli, G.; Pallarés, L. Structural health monitoring (SHM) and Nondestructive testing (NDT) of slender masonry structures: A practical review. Constr. Build. Mater. 2021, 297, 123768. [Google Scholar] [CrossRef]
- Binda, L.; Saisi, A.; Zanzi, L. Sonic tomography and flat-jack tests as complementary investigation procedures for the stone pillars of S. Nicolò l’Arena (Italy). NDT E Int. 2003, 36, 215–227. [Google Scholar] [CrossRef]
- Leucci, G.; Masini, N.; Persico, R.; Soldovieri, F. GPR and sonic tomography for structural restoration: The case of the cathedral of Tricarico. J. Geophys. Eng. 2011, 8, S76–S92. [Google Scholar] [CrossRef]
- Pérez-Gracia, V.; Caselles, J.O.; Clapés, J.; Martínez, G.; Osorio, R. Non-destructive analysis in cultural heritage buildings: Evaluating the Mallorca cathedral supporting structures. NDT E Int. 2013, 59, 40–47. [Google Scholar] [CrossRef]
- Luchin, G.; Ramos, L.F.; D’Amato, M. Sonic Tomography for Masonry Walls Characterization. Int. J. Archit. Herit. 2020, 14, 589–604. [Google Scholar] [CrossRef]
- Binda, L.; Saisi, A.; Tiraboschi, C.; Valle, S.; Colla, C.; Forde, M. Application of sonic and radar tests on the piers and walls of the Cathedral of Noto. Constr. Build. Mater. 2003, 17, 613–627. [Google Scholar] [CrossRef]
- Valluzzi, M.R.; Cescatti, E.; Cardana, G.; Cantini, L.; Zanzi, L.; Colla, C.; Casarin, F. Calibration of sonic pulse velocity tests for detection of variable conditions in masonry walls. Constr. Build. Mater. 2018, 192, 272–286. [Google Scholar] [CrossRef]
- Ranalli, D.; Scozzafava, M.; Tallini, M. Ground penetrating radar investigations for restoration of historical building: The case study of Collemaggio Basilicata (L’aquila, Italy). J. Cult. Herit. 2004, 5, 91–99. [Google Scholar] [CrossRef]
- Masini, N.; Nuzzo, L.; Rizzo, E. GPR investigations for the study and the restoration of the Rose Window of Troia Cathedral (Southern Italy). Near Surf. Geophys. 2007, 5, 287–300. [Google Scholar] [CrossRef]
- Khairi, M.T.M.; Ibrahim, S.; Yunus, M.A.; Faramarzi, M.; Sean, G.P.; Pusppanathan, J.; Abid, A. Ultrasound computed tomography for material inspection: Principles design and applications. Measurement 2019, 146, 490–593. [Google Scholar] [CrossRef]
- Babacan, A.E.; Gelisli, K. Ultrasonic investigations of marble columns of historical structures built in two different periods. Carbonates Evaporites 2015, 30, 357–363. [Google Scholar] [CrossRef]
- Zielińska, M.; Rucka, M. Non-Destructive assessment of masonry pillars using ultrasonic tomography. Materials 2018, 11, 2543. [Google Scholar] [CrossRef] [PubMed]
- Menningen, J.; Siegesmund, S.; Krompholz, R.; Rieffel, Y. The marble sculptures of General Bülow and Scharnhorst in Berlin: Comparative, non-destructive analysis of the weathering state after 12 years of exposure. Environ. Earth Sci. 2020, 79, 249. [Google Scholar] [CrossRef]
- Casula, G.; Cuccuru, F.; Bianchi, M.G.; Fais, S.; Ligas, P. High resolution 3-D modelling of cylinder shape bodies applied to ancient columns of a church. Adv. Geosci. 2020, 54, 119–127. [Google Scholar] [CrossRef]
- Siegesmund, S.; Menningen, J.; Shushakova, V. Marble decay: Towards a measure of marble degradation based on ultrasonic wave velocities and thermal expansion data. Environ. Earth Sci. 2021, 80, 395. [Google Scholar] [CrossRef]
- Ranz, J.; Aparicio, S.; Romero, H.; Casati, M.J.; Molero, M.; González, M. Monitoring of Freeze-Thaw Cycles in Concrete Using Embedded Sensors and Ultrasonic Imaging. Sensors 2014, 14, 2280–2304. [Google Scholar] [CrossRef]
- Hernandez, M.G.; Lluveras, D.; Izquierdo, M.A.G.; Ranz, J.; Aparicio, S. Evaluación de la Calidad de la Arenisca Albamiel Mediante END por Ultrasonidos; Libro de Comunicaciones 13º Congreso de Nacional de Ensayos No Destructivos: Sevilla, Spain, 2015; ISBN 978-84-606-7565-5. [Google Scholar]
- Molero-Armenta, M.; Iturrarán-Viveros, U.; Aparicio, S.; Hernández, M.G. Optimized OpenCL Implementation of the Elastodynamic Finite Integration Technique for viscoelastic media. Comput. Phys. Commun. 2014, 185, 2683–2696. [Google Scholar] [CrossRef]
- SimNDT. Available online: https://github.com/mmolero/SimNDT (accessed on 6 April 2021).
- Ramonet Marqués, F. Diseño, fabricación, ensamble y sincronización de un sistema mecánico para la inspección tomográfica por ultrasonidos. Rev. AEND 2020, 98, 40–47. [Google Scholar]
- Mendonck, M. Internship Report AE5050; Delft University: Delft, The Netherlands, 2020. [Google Scholar]
- Secanellas, S.A.; Parrila, M.; Ibáñez, A.; Martínez, Ó.; Hernández, M.G.; Velayos, J.J.A. Método y Sistema de Calibración de un Sistema de Inspección Mediante Ultrasonidos. ES Patent nº 202130210, 2021. [Google Scholar]
- Kurz, J.H.; Grosse, C.U.; Reinhardt, H.-W. Strategies for reliable automatic onset time picking of acoustic emissions and of ultrasound signals in concrete. Ultrasonics 2005, 43, 538–546. [Google Scholar] [CrossRef]
- Lluveras, D.; Molero Armenta, M.; Izquierdo, M.A.G.; Hernández, M.G.; Anaya, J.J. Ultrasound Transmission Tomography for the Assessment of Inclusions in Concrete. Sensors 2017, 17, 1085. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pereira, C. The Archaeological Museum of Carmo. Heritage Within—European Research Project; Universidade do Minho. Escola de Engenharia: Braga, Portugal, 2021; pp. 15–26. ISBN 978-989-54496-6-8t. [Google Scholar]
- Simson, O.G.V. The Gothic Cathedral: Origins of Gothic Architecture and the Medieval Concept of Order, Expanded ed.; Princeton University Press: Princeton, NJ, USA, 1988. [Google Scholar]
- Borghardt, J. Gothic Stone Masonry Cross-Sections: NDT Sonic Tomography. MSC Thesis, University of Minho, Braga, Portugal, 2021. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
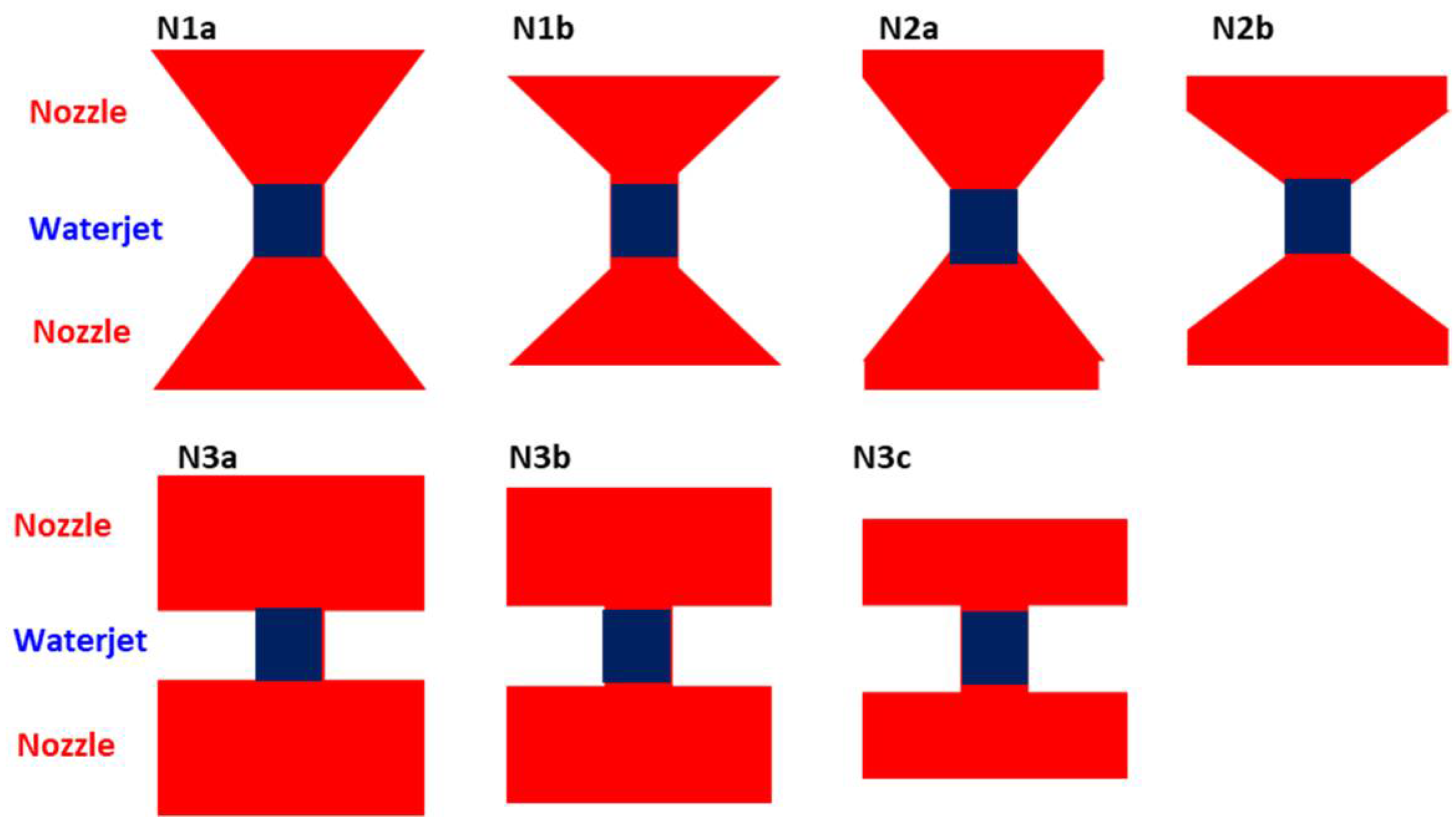
| Nozzle | Waterjet | ||||
|---|---|---|---|---|---|
| Dsup (mm) | Dinf (mm) | H (mm) | D (mm) | H (mm) | |
| N1a (λ) | 40 | 10 | 20 | 10 | 10 |
| N1b (λ/2) | 40 | 10 | 10 | 10 | 10 |
| N2a (λ) | 40 | 10 | 25 | 10 | 10 |
| N2b (λ/2) | 40 | 10 | 15 | 10 | 10 |
| N3a (λ) | 40 | 10 | 20 | 10 | 10 |
| N3b (λ/2) | 40 | 10 | 15 | 10 | 10 |
| N3c (λ/2) | 40 | 10 | 10 | 10 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aparicio Secanellas, S.; Liébana Gallego, J.C.; Anaya Catalán, G.; Martín Navarro, R.; Ortega Heras, J.; García Izquierdo, M.Á.; González Hernández, M.; Anaya Velayos, J.J. An Ultrasonic Tomography System for the Inspection of Columns in Architectural Heritage. Sensors 2022, 22, 6646. https://doi.org/10.3390/s22176646
Aparicio Secanellas S, Liébana Gallego JC, Anaya Catalán G, Martín Navarro R, Ortega Heras J, García Izquierdo MÁ, González Hernández M, Anaya Velayos JJ. An Ultrasonic Tomography System for the Inspection of Columns in Architectural Heritage. Sensors. 2022; 22(17):6646. https://doi.org/10.3390/s22176646
Chicago/Turabian StyleAparicio Secanellas, Sofía, Juan Carlos Liébana Gallego, Guillermo Anaya Catalán, Rodrigo Martín Navarro, Javier Ortega Heras, Miguel Ángel García Izquierdo, Margarita González Hernández, and José Javier Anaya Velayos. 2022. "An Ultrasonic Tomography System for the Inspection of Columns in Architectural Heritage" Sensors 22, no. 17: 6646. https://doi.org/10.3390/s22176646
APA StyleAparicio Secanellas, S., Liébana Gallego, J. C., Anaya Catalán, G., Martín Navarro, R., Ortega Heras, J., García Izquierdo, M. Á., González Hernández, M., & Anaya Velayos, J. J. (2022). An Ultrasonic Tomography System for the Inspection of Columns in Architectural Heritage. Sensors, 22(17), 6646. https://doi.org/10.3390/s22176646