
Computational Efficient Motion Planning Method for Automated Vehicles Considering Dynamic Obstacle Avoidance and Traffic Interaction

 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. State-of-the-Art Review and Challenges
1.2. Work and Contributions
- The complex and reasonable behavior of the host vehicle is efficiently realized by connecting different points located on unequally divided road segments and lane centerlines.
- Trajectory prediction of surrounding vehicles is considered during trajectory planning. And the trajectory planning is based on both driver’s intention and the kinematics vehicle model, which can increase the accuracy and rationality.
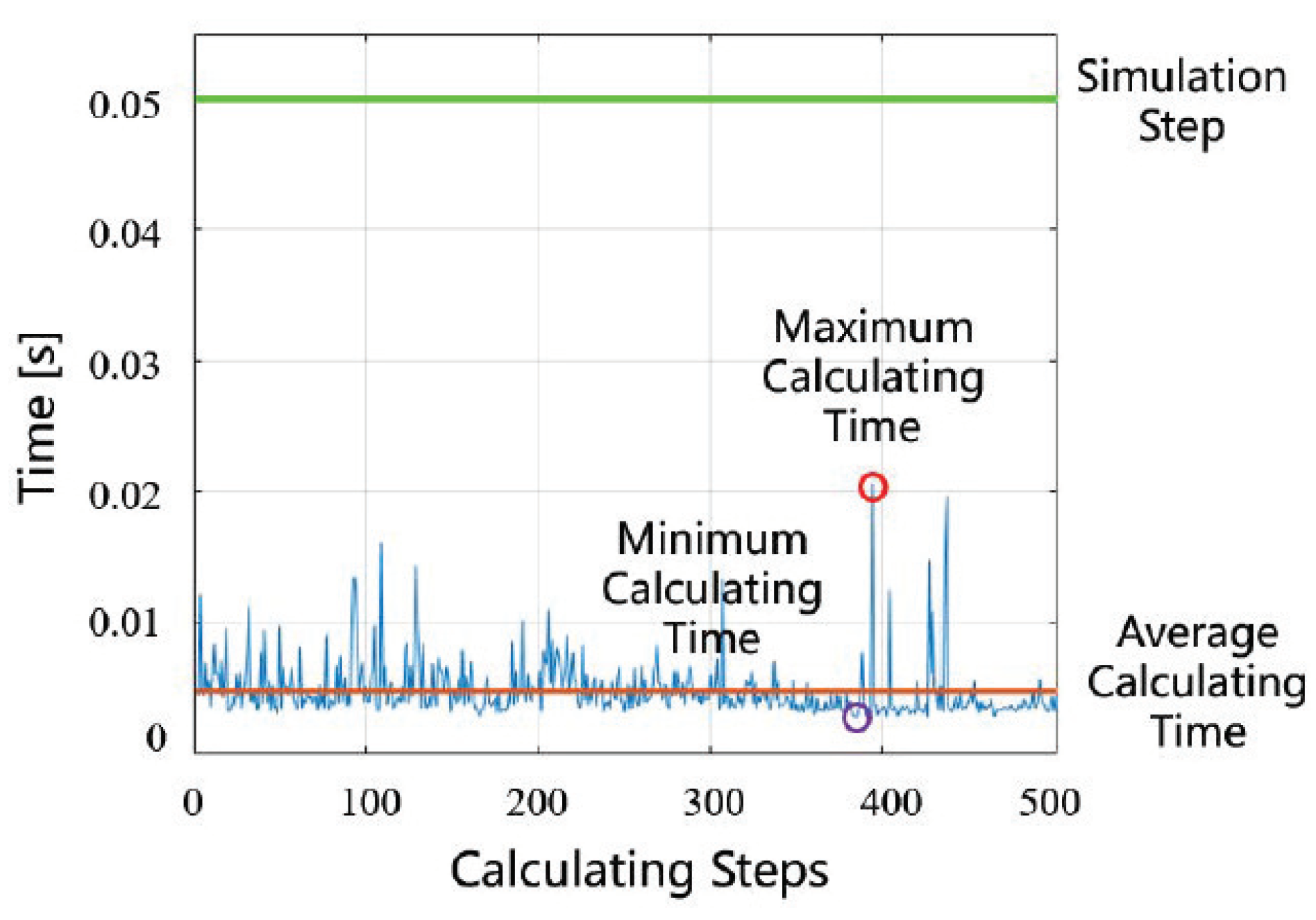
- C/GMRES is used to realize online calculation and raise the reasonability of trajectory generation and trajectory following.
2. Coordinate Systems Conversion and Trajectory Prediction
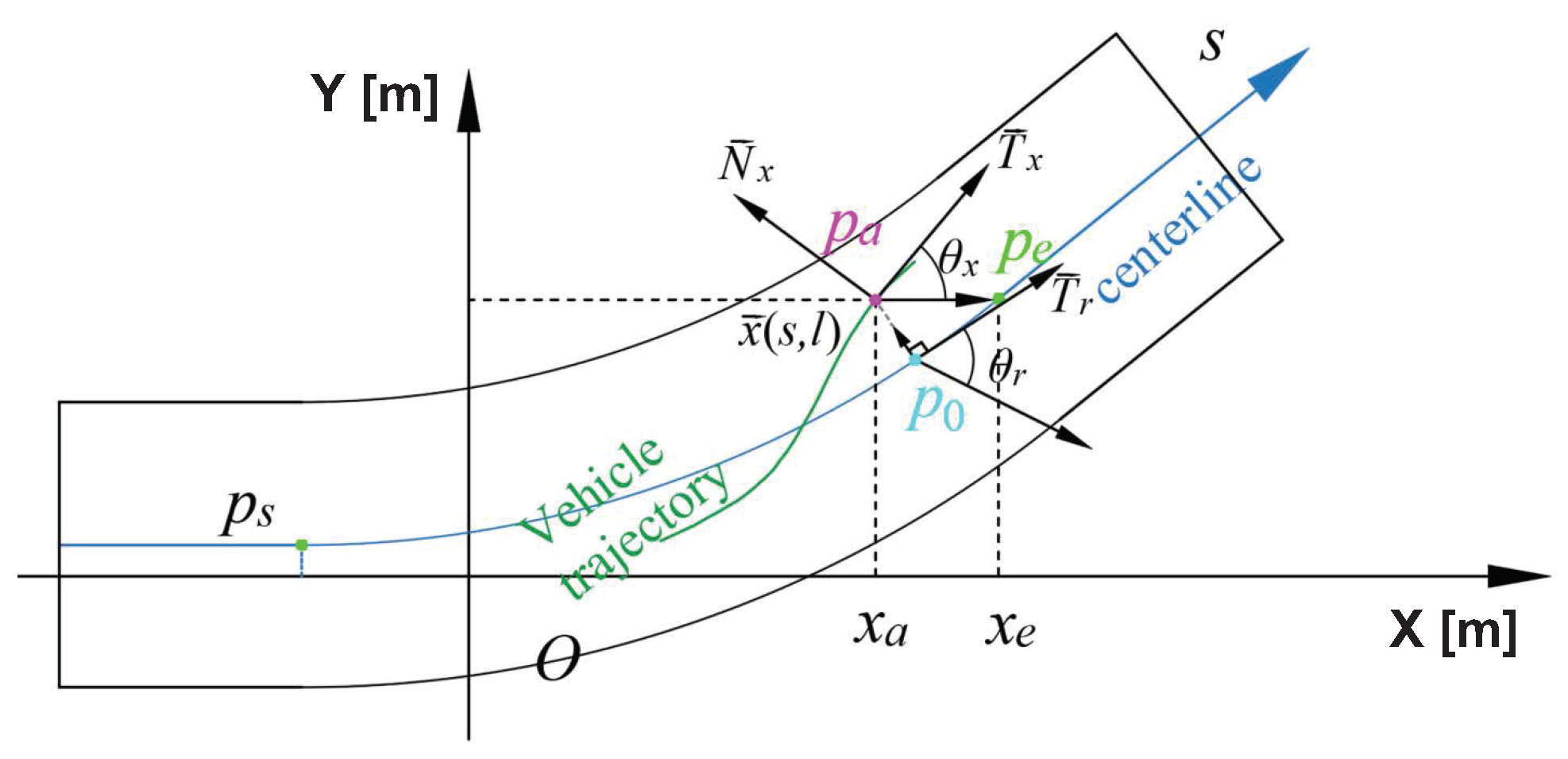
2.1. Coordinate Systems Conversion
2.2. Trajectory Prediction
2.2.1. Trajectory Prediction Based on Driver’s Intention
2.2.2. Trajectory Prediction Based on Vehicle Kinematics Model
2.2.3. Trajectory Prediction Based on Both Driver’s Intention and Vehicle Kinematics Model
3. Behavioral Planning
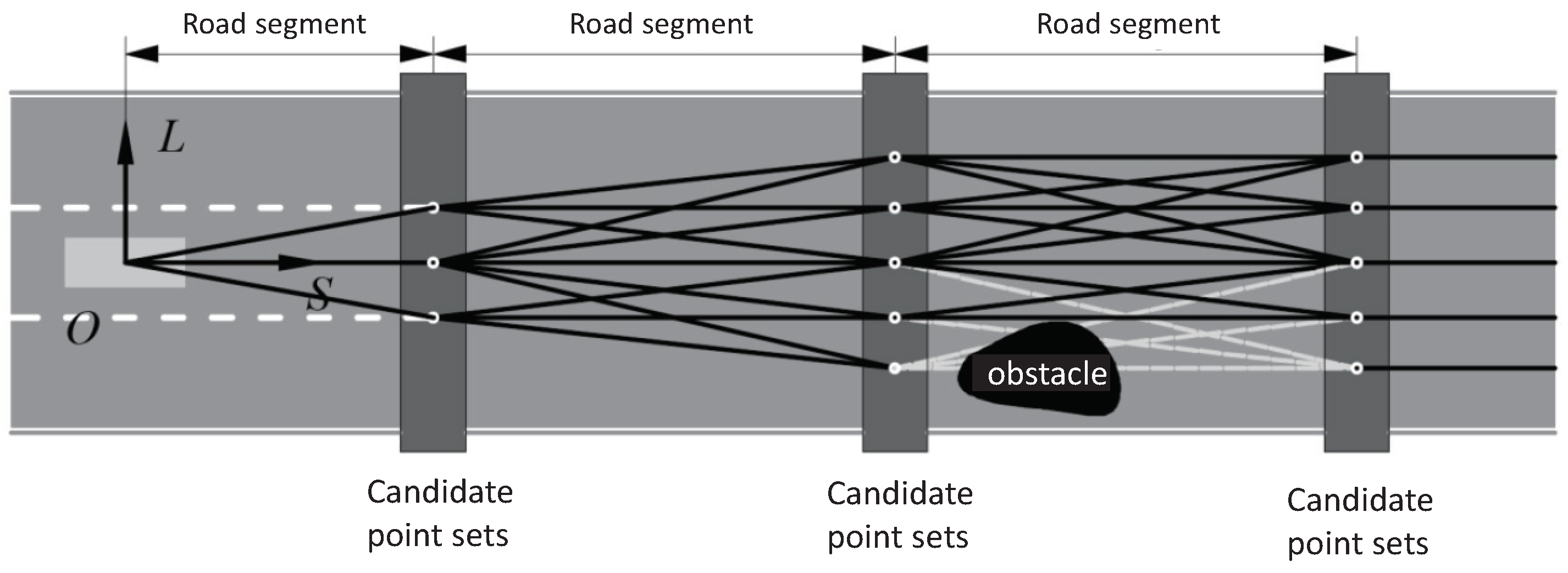
3.1. Generation of Candidate Paths
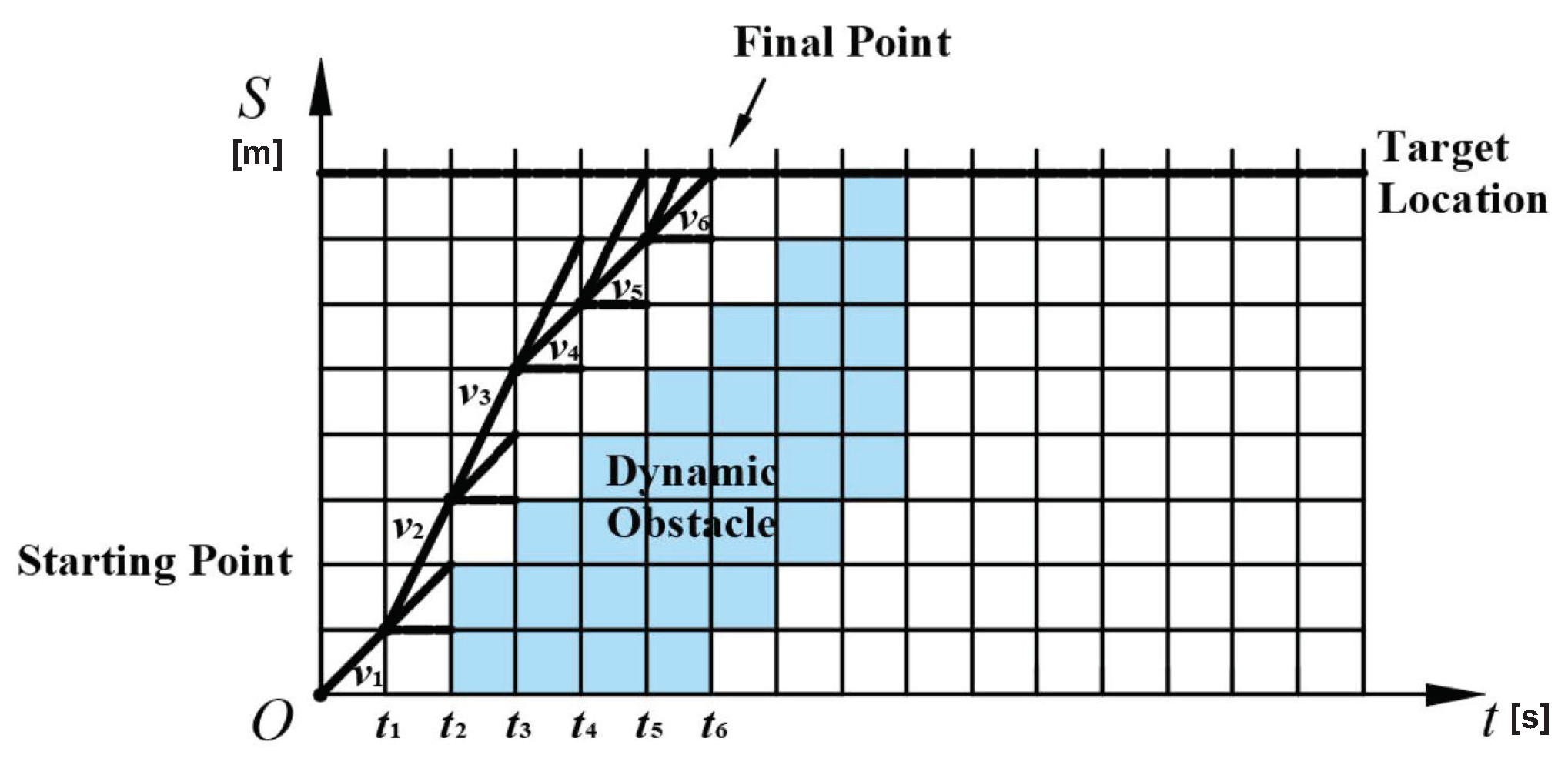
3.2. Speed Profile
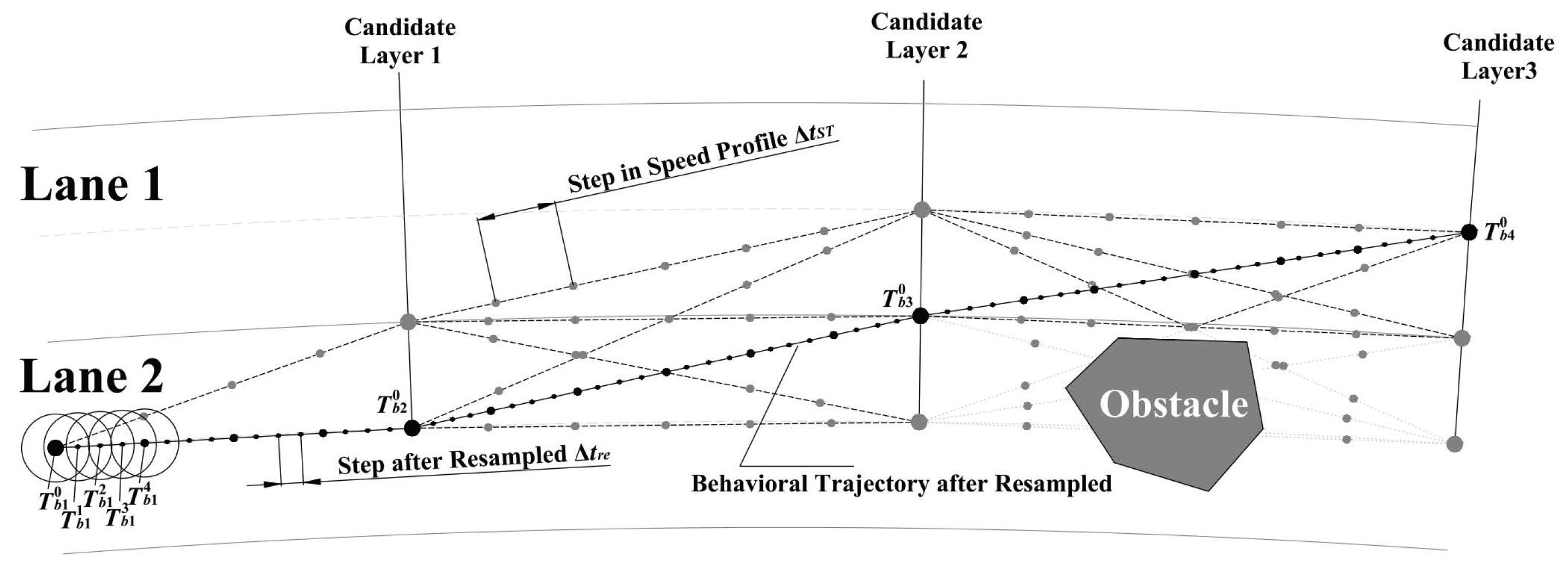
3.3. Optimal Behavioral Trajectory Selection
3.4. Resampled Behavioral Trajectory
4. Trajectory Generation
4.1. Vehicle Dynamic Model
4.2. Controller Design
4.3. C-GMRES
| Algorithm 1 C/GMRES Algorithm |
| //Initialize , , initial state and find analytically or numerically such that for some positive δ, maximum iteration number . 1. For , compute the real control input by . 2. At next sampling instant , measure the state , set . 3. , where with . 4. . 5. Update , . |
5. Simulation
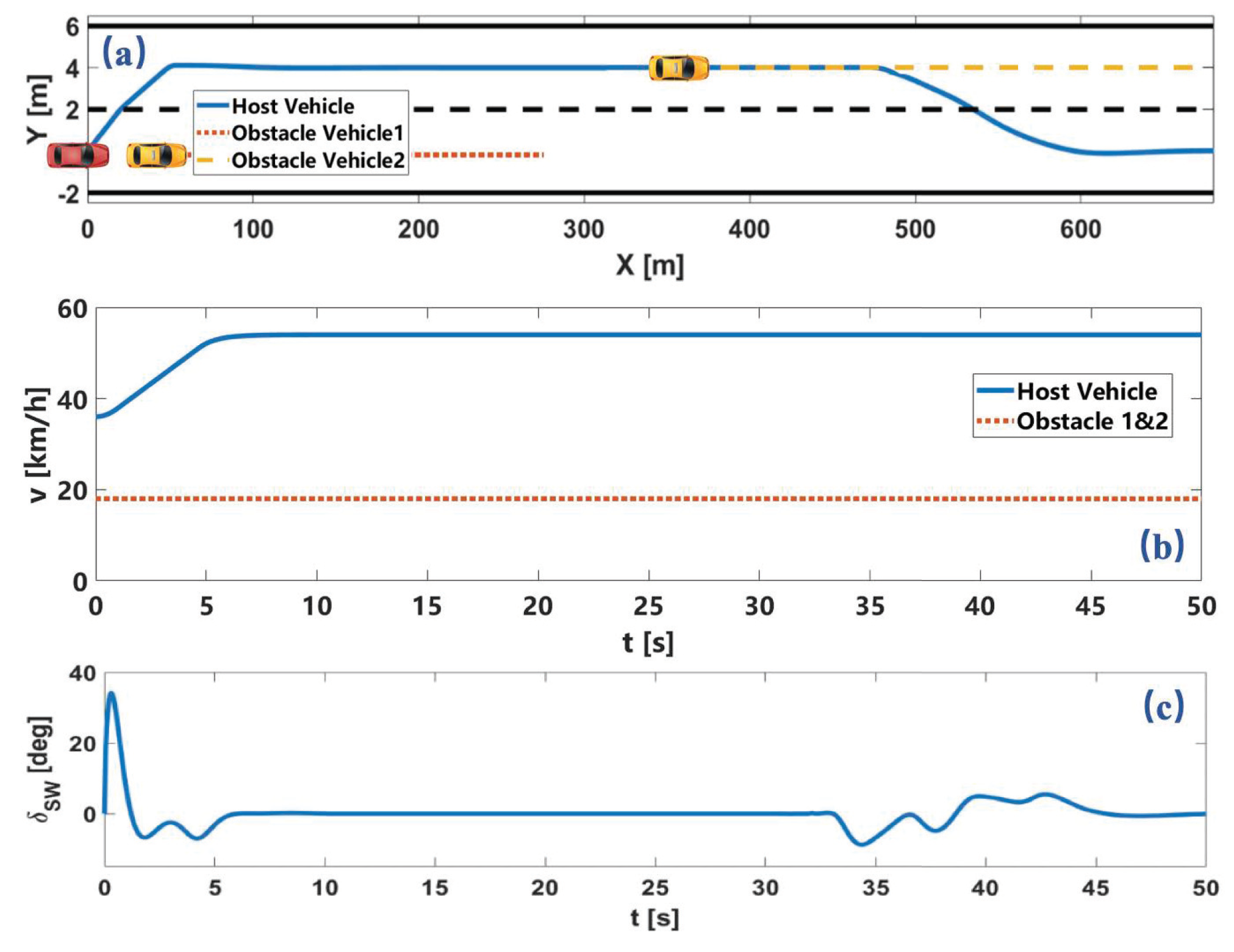
5.1. Obstacle Avoidance on Straight Lane
5.2. Obstacle Avoidance on Winding Lane
5.3. Lane-Changing Obstacle Avoidance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1135–1145. [Google Scholar] [CrossRef]
- Schwarting, W.; Alonso-Mora, J.; Rus, D. Planning and decision-making for autonomous vehicles. Annu. Rev. Control. Robot. Auton. Syst. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Nilsson, J.; Sjöberg, J. Strategic decision making for automated driving on two-lane, one way roads using model predictive control. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 1253–1258. [Google Scholar]
- Xie, G.; Gao, H.; Qian, L.; Huang, B.; Li, K.; Wang, J. Vehicle trajectory prediction by integrating physics-and maneuver-based approaches using interactive multiple models. IEEE Trans. Ind. Electron. 2017, 65, 5999–6008. [Google Scholar] [CrossRef]
- Houenou, A.; Bonnifait, P.; Cherfaoui, V.; Yao, W. Vehicle trajectory prediction based on motion model and maneuver recognition. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4363–4369. [Google Scholar]
- Liu, W.; Kim, S.W.; Pendleton, S.; Ang, M.H. Situation-aware decision making for autonomous driving on urban road using online POMDP. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 1126–1133. [Google Scholar]
- Song, W.; Xiong, G.; Chen, H. Intention-aware autonomous driving decision-making in an uncontrolled intersection. Math. Probl. Eng. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Lim, W.; Lee, S.; Sunwoo, M.; Jo, K. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method. IEEE Trans. Intell. Transp. Syst. 2018, 19, 613–626. [Google Scholar] [CrossRef]
- Wei, J.; Snider, J.M.; Gu, T.; Dolan, J.M.; Litkouhi, B. A behavioral planning framework for autonomous driving. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 458–464. [Google Scholar]
- Schmerling, E.; Janson, L.; Pavone, M. Optimal sampling-based motion planning under differential constraints: The driftless case. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2368–2375. [Google Scholar]
- Li, Y.; Littlefield, Z.; Bekris, K.E. Sparse methods for efficient asymptotically optimal kinodynamic planning. In Algorithmic Foundations of Robotics XI; Springer: Berlin/Heidelberg, Germany, 2015; pp. 263–282. [Google Scholar]
- Broggi, A.; Medici, P.; Zani, P.; Coati, A.; Panciroli, M. Autonomous vehicles control in the VisLab intercontinental autonomous challenge. Annu. Rev. Control. 2012, 36, 161–171. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Ziegler, J.; Bender, P.; Schreiber, M.; Lategahn, H.; Strauss, T.; Stiller, C.; Dang, T.; Franke, U.; Appenrodt, N.; Keller, C.G.; et al. Making bertha drive?aan autonomous journey on a historic route. IEEE Intell. Transp. Syst. Mag. 2014, 6, 8–20. [Google Scholar] [CrossRef]
- Rasekhipour, Y.; Fadakar, I.; Khajepour, A. Autonomous driving motion planning with obstacles prioritization using lexicographic optimization. Control. Eng. Pract. 2018, 77, 235–246. [Google Scholar] [CrossRef]
- Gil, A.F.A.; Ruíz, A.M.; Espinosa, J.J. Nonlinear Model Predictive Control of a Passenger Vehicle for Automated Lane Changes. Revista Ingeniería Electrónica Automática y Comunicaciones 2019, 38, 56. [Google Scholar]
- Nolte, M.; Rose, M.; Stolte, T.; Maurer, M. Model predictive control based trajectory generation for autonomous vehicles? An architectural approach. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 798–805. [Google Scholar]
- Arikere, A.; Yang, D.; Klomp, M.; Lidberg, M. Integrated evasive manoeuvre assist for collision mitigation with oncoming vehicles. Veh. Syst. Dyn. 2018, 56, 1577–1603. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, B.; Guo, L.; Guo, H.; Cui, M. A Novel Trajectory Planning Method for Automated Vehicles Under Parameter Decision Framework. IEEE Access 2019, 7, 88264–88274. [Google Scholar] [CrossRef]
- Tajeddin, S.; Vajedi, M.; Azad, N.L. A Newton/GMRES approach to predictive ecological adaptive cruise control of a plug-in hybrid electric vehicle in car-following scenarios. IFAC-PapersOnLine 2016, 49, 59–65. [Google Scholar] [CrossRef]
- Shen, C.; Buckham, B.; Shi, Y. Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs. IEEE Trans. Control. Syst. Technol. 2016, 25, 1896–1904. [Google Scholar] [CrossRef]
- Deng, H.; Ohtsuka, T. A parallel Newton-type method for nonlinear model predictive control. Automatica 2019, 109, 108560. [Google Scholar] [CrossRef]
- Kim, J.; Jo, K.; Lim, W.; Lee, M.; Sunwoo, M. Curvilinear-coordinate-based object and situation assessment for highly automated vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1559–1575. [Google Scholar] [CrossRef]
- Wang, H.; Kearney, J.; Atkinson, K. Robust and efficient computation of the closest point on a spline curve. In Proceedings of the 5th International Conference on Curves and Surfaces, Saint-Malo, France, 27 June–3 July 2002; pp. 397–406. [Google Scholar]
- Ohtsuka, T. A continuation/GMRES method for fast computation of nonlinear receding horizon control. Automatica 2004, 40, 563–574. [Google Scholar] [CrossRef]
- Wenshuo, W.; Letian, W.; Chengyuan, Z.; Changliu, L.; Lijun, S. Social Interactions for Autonomous Driving: A Review and Perspective. arXiv 2022, arXiv:2208.07541. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, J.; Lv, J.; Gao, B.; Chu, H.; Na, X. Computational Efficient Motion Planning Method for Automated Vehicles Considering Dynamic Obstacle Avoidance and Traffic Interaction. Sensors 2022, 22, 7397. https://doi.org/10.3390/s22197397
Zhang Y, Wang J, Lv J, Gao B, Chu H, Na X. Computational Efficient Motion Planning Method for Automated Vehicles Considering Dynamic Obstacle Avoidance and Traffic Interaction. Sensors. 2022; 22(19):7397. https://doi.org/10.3390/s22197397
Chicago/Turabian StyleZhang, Yuxiang, Jiachen Wang, Jidong Lv, Bingzhao Gao, Hongqing Chu, and Xiaoxiang Na. 2022. "Computational Efficient Motion Planning Method for Automated Vehicles Considering Dynamic Obstacle Avoidance and Traffic Interaction" Sensors 22, no. 19: 7397. https://doi.org/10.3390/s22197397
APA StyleZhang, Y., Wang, J., Lv, J., Gao, B., Chu, H., & Na, X. (2022). Computational Efficient Motion Planning Method for Automated Vehicles Considering Dynamic Obstacle Avoidance and Traffic Interaction. Sensors, 22(19), 7397. https://doi.org/10.3390/s22197397