

Acoustic Wave Reflection in Water Affects Underwater Wireless Sensor Networks

 ,
,  ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
1.1. Basic Discussion of UWSN
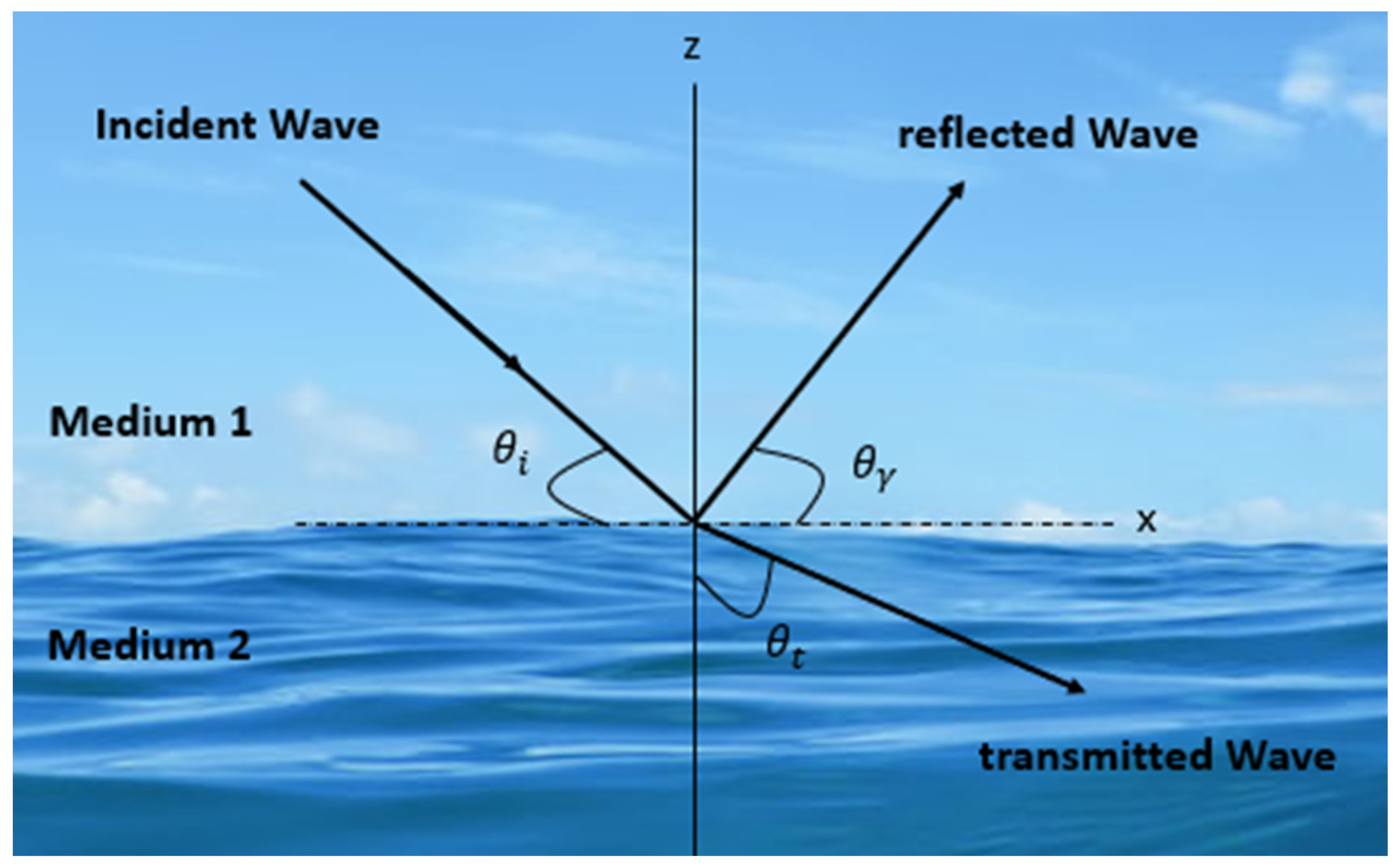
1.2. Preliminary Description of Acoustic Wave Reflection in UWSN
1.3. Problem Formulation
1.4. Proposed Solution
- Development of a design model for UWSN’s water–sediment interaction, taking into consideration the effects of acoustic reflections;
- A comparison of the simulation’s results with the model currently in use;
- An investigation on the permeability and porosity of the design model.
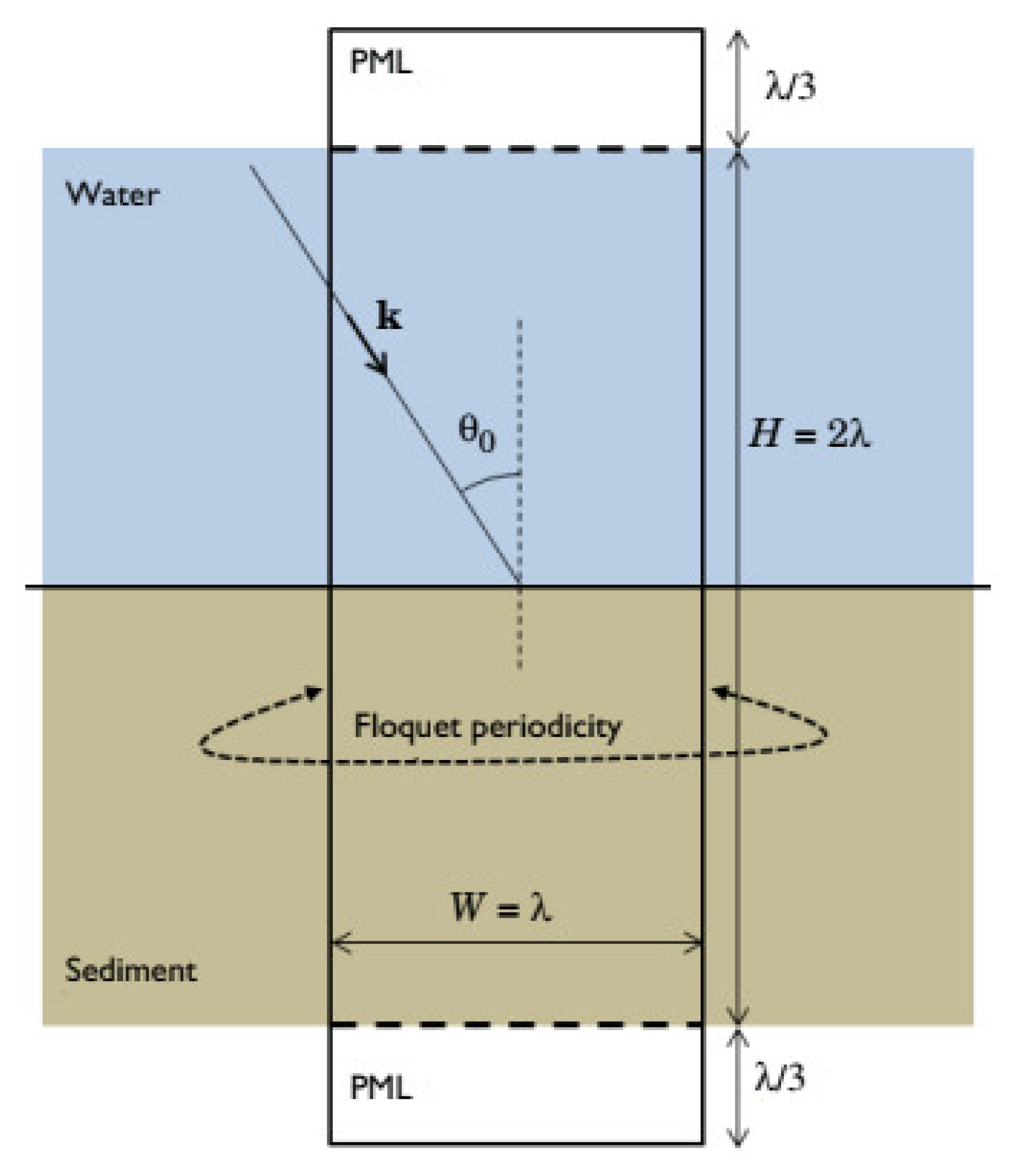
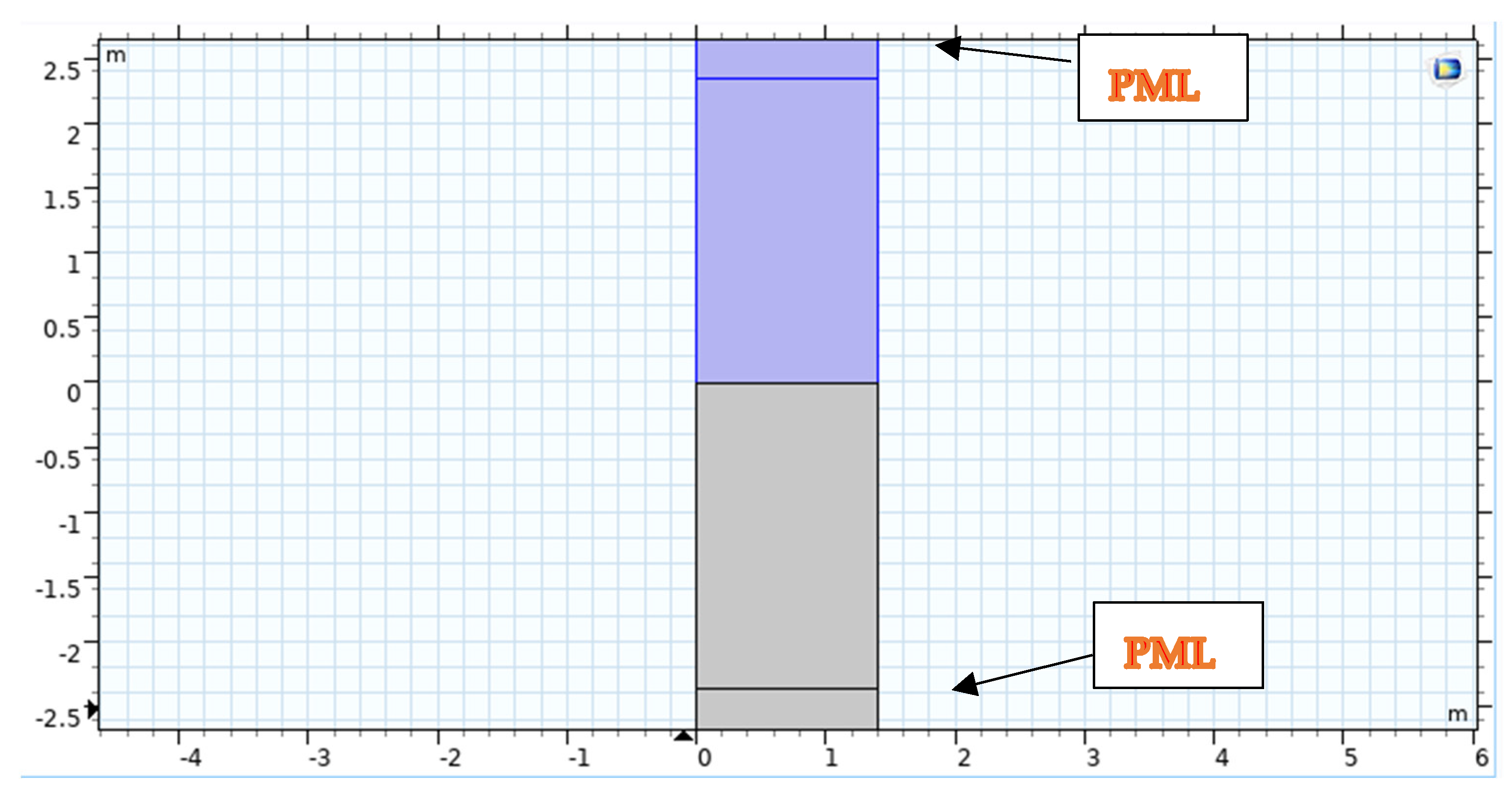
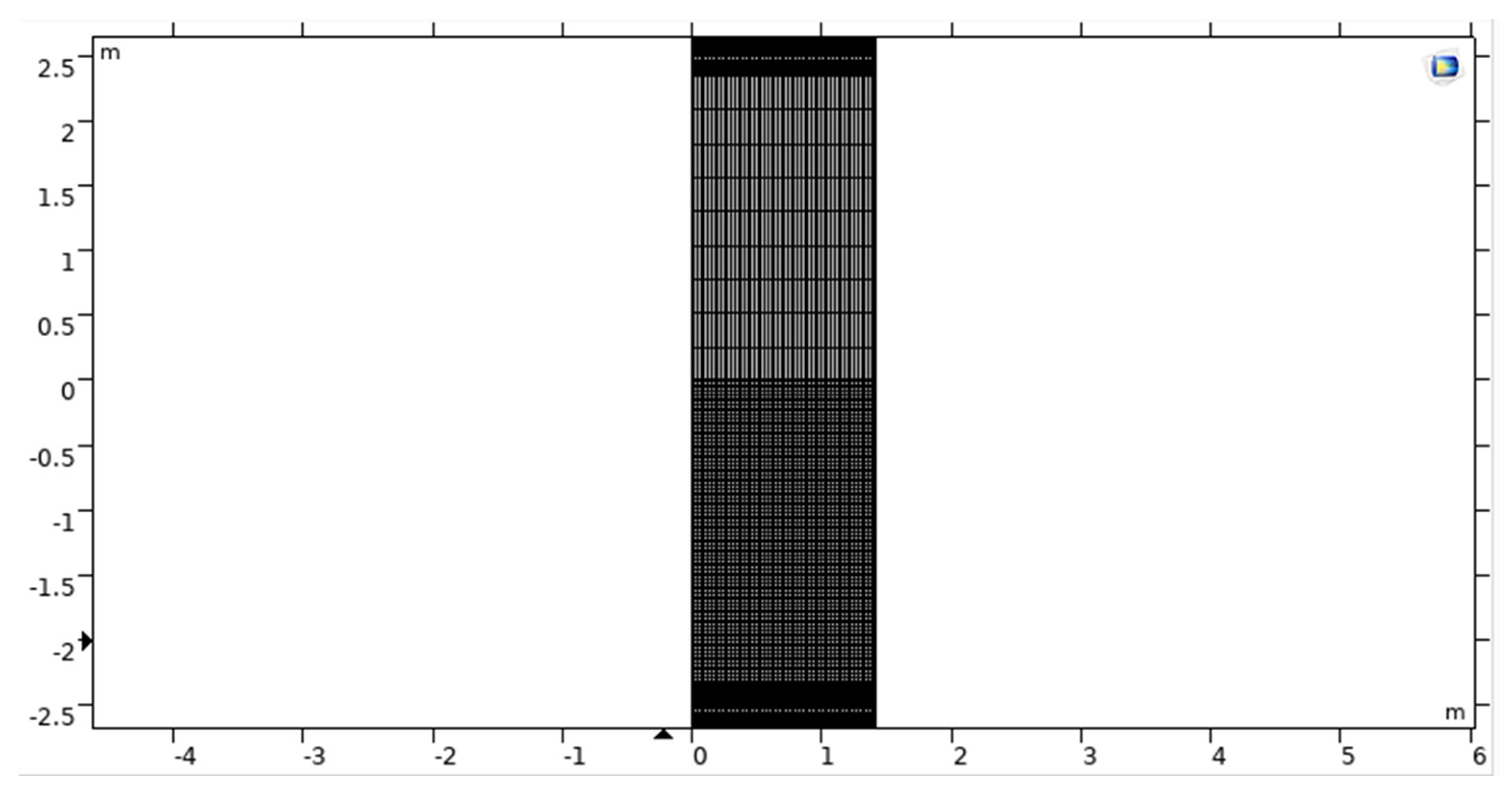
2. Modeling Geometry
3. Conditions at the Boundaries
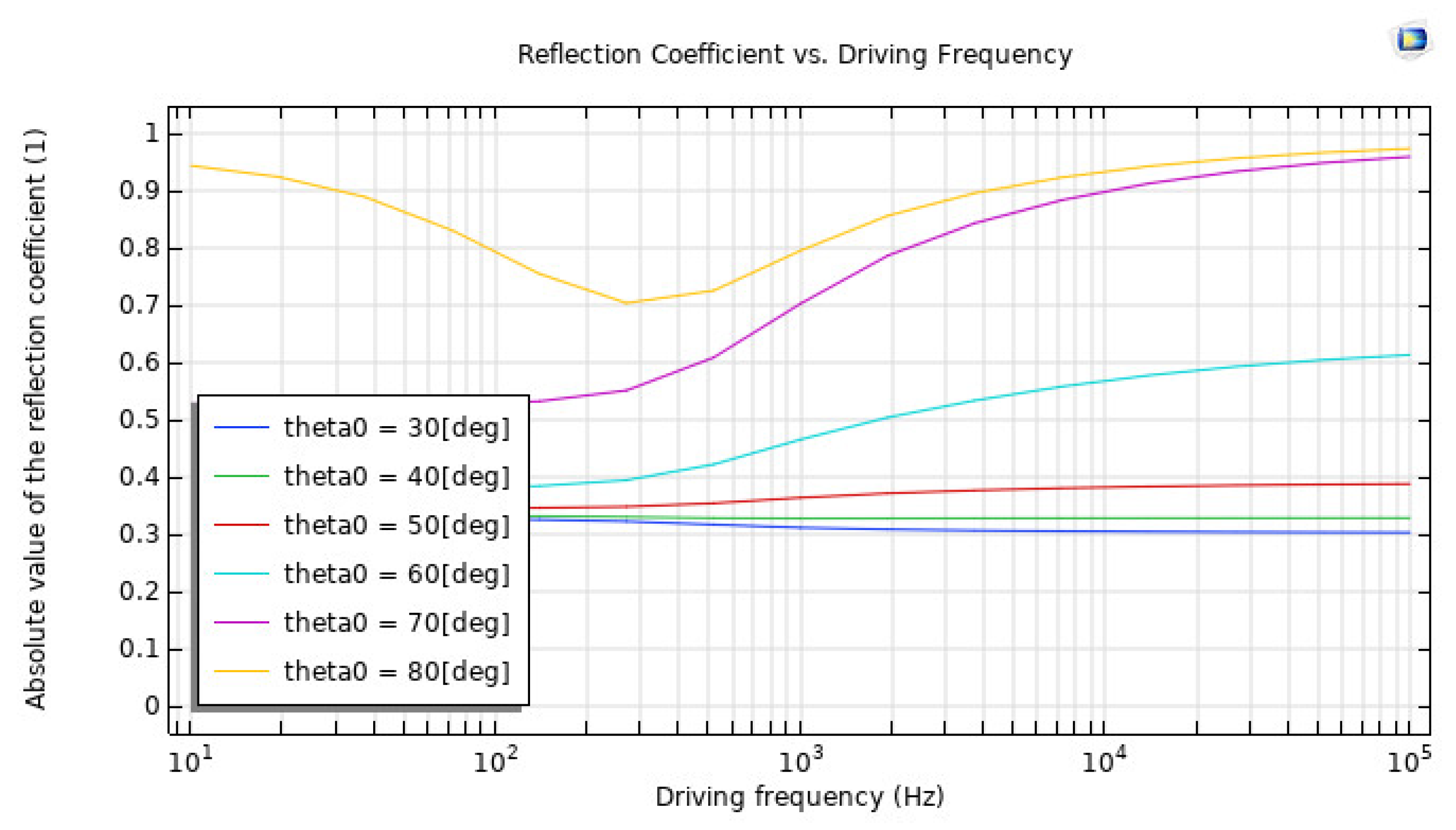
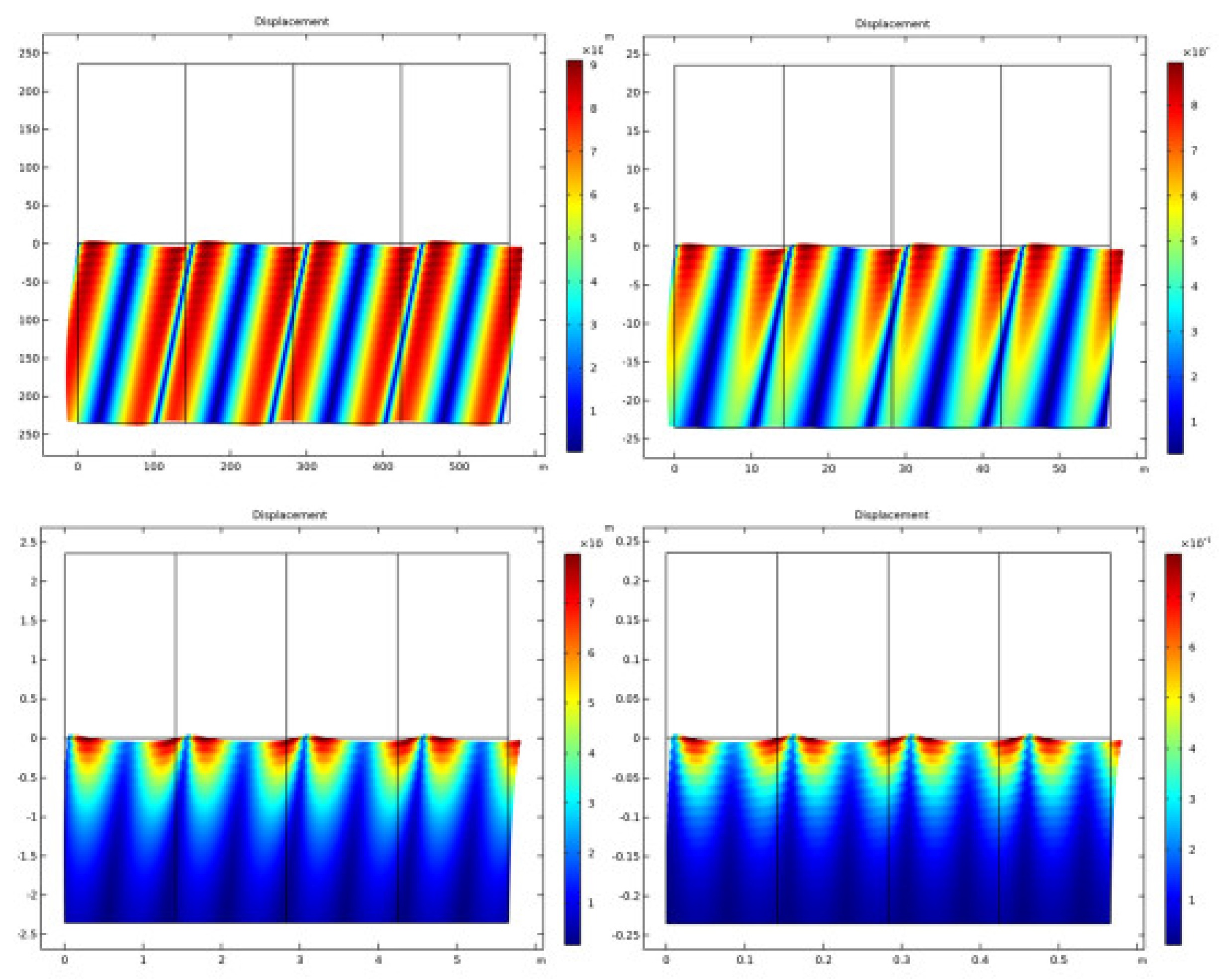
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Wireless Sensor Networks | (WSN) |
| Base Station | (BS) |
| Underwater Wireless Sensor Networks | (UWSNs) |
| Autonomous Underwater Vehicles | (AUVs) |
| Unmanned Undersea Vehicles | (UUVs) |
| Radio Frequency | (RF) |
| Non-Destructive Testing | (NDT) |
| Travelling Wave Tube | (TWT) |
| Perfectly Matched Layers | (PMLs) |
References
- Kamal Kumar, G.; Bhumika, G.; Zubair, I. Implementation and result analysis of secure strategy for high speed transmission and efficient collection of data in wireless sensor network. Int. J. Comput. Appl. 2014, 108, 12. [Google Scholar]
- Ghosh, I. Study on hierarchical cluster-based energy-efficient routing in wireless sensor networks. Int. Res. J. Eng. Technol. IRJET 2018, 5, 688–691. [Google Scholar]
- Sahana, S.; Singh, K.; Kumar, R.; Das, S. A review of underwater wireless sensor network routing protocols and challenges. In Next-Generation Networks; Springer: Singapore, 2018; pp. 505–512. [Google Scholar]
- Paramesh, J.; Robin, C.R. A novel and efficient routing protocol for fishermen using underwater wireless sensor network. J. Comput. Theor. Nanosci. 2018, 15, 1226–1232. [Google Scholar] [CrossRef]
- Jia-Tong, L.; Chen, Z.; Hong-Xin, Z. On simultaneous AUV localization with single acoustic beacon using angles measurements. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 2372–2378. [Google Scholar]
- Ranjha, A.; Kaddoum, G.; Rahim, M.; Dev, K. URLLC in UAV-enabled multicasting systems: A dual time and energy minimization problem using UAV speed, altitude and beamwidth. Comput. Commun. 2022, 187, 125–133. [Google Scholar] [CrossRef]
- Narsani, H.K.; Ranjha, A.; Dev, K.; Memon, F.H.; Qureshi, N.M.F. Leveraging UAV-assisted communications to improve secrecy for URLLC in 6G systems. Digit. Commun. Netw. 2022; in press. [Google Scholar] [CrossRef]
- Hirosawa, K.; Takashima, K.; Nakagawa, H.; Kon, M.; Yamamoto, A.; Lauriks, W. Comparison of three measurement techniques for the normal absorption coefficient of sound absorbing materials in the free field. J. Acoust. Soc. Am. 2009, 126, 3020–3027. [Google Scholar] [CrossRef]
- Asif, M.; Ihsan, A.; Khan, W.U.; Ranjha, A.; Zhang, S.; Wu, S.X. Energy-Efficient Backscatter-Assisted Coded Cooperative-NOMA for B5G Wireless Communications. IEEE Trans. Green Commun. Netw. 2022, 7, 70–83. [Google Scholar] [CrossRef]
- Sun, L.; Hou, H.; Dong, L.-Y.; Wan, F.-R. Measurement of characteristic impedance and wave number of porous material using pulse-tube and transfer-matrix methods. J. Acoust. Soc. Am. 2009, 126, 3049–3056. [Google Scholar] [CrossRef]
- Sathish, K.; Anbazhagan, R.; Venkata, R.C.; Arena, F.; Pau, G. Investigation and Numerical Simulation of the Acoustic Target Strength of the Underwater Submarine Vehicle. Inventions 2022, 7, 111. [Google Scholar] [CrossRef]
- Anirudh, K.; Ankit, G. Reflection of oblique incident acoustic waves at various fluid-solid interface for varying material properties. Appl. Acoust. 2021, 174, 107611. [Google Scholar]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the Wireless Communications and Networking Conference (WCNC 2006), Las Vegas, NV, USA, 3–6 April 2006; Volume 1, pp. 228–235. [Google Scholar]
- Jan, S.; Yafi, E.; Hafeez, A.; Khatana, H.W.; Hussain, S.; Akhtar, R.; Wadud, Z. Investigating Master–Slave Architecture for Underwater Wireless Sensor Network. Sensors 2021, 21, 3000. [Google Scholar] [CrossRef] [PubMed]
- Bagadi, K.; Ravikumar, C.V.; Sathish, K.; Alibakhshikenari, M.; Virdee, B.S.; Kouhalvandi, L.; Olan-Nunez, K.N.; Pau, G.; See, C.H.; Dayoub, I.; et al. Detection of Signals in MC–CDMA Using a Novel Iterative Block Decision Feedback Equalizer. IEEE Access 2022, 10, 105674–105684. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.V.; Srinivasulu, A.; Rajesh, A.; Oyerinde, O.O. Performance and Improvement Analysis of the Underwater WSN Using a Diverse Routing Protocol Approach. J. Comput. Netw. Commun. 2022, 2022, 9418392. [Google Scholar] [CrossRef]
- Meratnia, N.; Havinga, P.J.; Casari, P.; Petrioli, C.; Grythe, K.; Husoy, T.; Zorzi, M. CLAM—Collaborative embedded networks for submarine surveillance: An overview. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–4. [Google Scholar]
- Fang, Z.; Wang, J.; Jiang, C.; Wang, X.; Ren, Y. Average Peak Age of Information in Underwater Information Collection with Sleep-Scheduling. IEEE Trans. Veh. Technol. 2022, 71, 10132–10136. [Google Scholar] [CrossRef]
- Sathish, K.; Hamdi, M.; Chinthaginjala, R.; Pau, G.; Ksibi, A.; Anbazhagan, R.; Abbas, M.; Usman, M. Reliable Data Transmission in Underwater Wireless Sensor Networks Using a Cluster-Based Routing Protocol Endorsed by Member Nodes. Electronics 2023, 12, 1287. [Google Scholar] [CrossRef]
- Hayder, I.A.; Khan, S.N.; Althobiani, F.; Irfan, M.; Idrees, M.; Ullah, S.; Alsaaq, F.; Glowacz, A.; Goldasz, I.; Tomczyk, M.; et al. Towards Controlled Transmission: A Novel Power-Based Sparsity-Aware and Energy-Efficient Clustering for Underwater Sensor Networks in Marine Transport Safety. Electronics 2021, 10, 854. [Google Scholar] [CrossRef]
- Sadouki, M. Experimental characterization of rigid porous material via the first ultrasonic reflected waves at oblique incidence. Appl. Acoust. 2018, 133, 64–72. [Google Scholar] [CrossRef]
- Al-Habob, A.A.; Dobre, O.A.; Poor, V. Age-Optimal Information Gathering in Linear Underwater Networks: A Deep Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2021, 70, 13129–13138. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.V.; Rajesh, A.; Pau, G. Underwater Wireless Sensor Network Performance Analysis Using Diverse Routing Protocols. J. Sens. Actuator Netw. 2022, 11, 64. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.V.; Srinivasulu, A.; Gupta, A.K. Performance Analysis of Underwater Wireless Sensor Network by Deploying FTP, CBR, and VBR as Applications. J. Comput. Netw. Commun. 2022, 2022, 7143707. [Google Scholar] [CrossRef]
- Rani, S.; Ahmed, S.H.; Malhotra, J.; Talwar, R. Energy efficient chain based routing protocol for underwater wireless sensor networks. J. Netw. Comput. Appl. 2017, 92, 42–50. [Google Scholar] [CrossRef]
- Li, S.; Liu, S.; Yuan, S.; Wen, J.; Zhang, Z. Reflection of Acoustic Wave through Multilayered Porous Sea Ice Sandwiched between the Water and Air Half-Spaces. Appl. Sci. 2021, 11, 7411. [Google Scholar] [CrossRef]
- Gardziejczyk, W.; Jaskula, P.; Ejsmont, J.A.; Motylewicz, M.; Stienss, M.; Mioduszewski, P.; Gierasimiuk, P.; Zawadzki, M. Investigation of Acoustic Properties of Poroelastic Asphalt Mixtures in Laboratory and Field Conditions. Materials 2021, 14, 2649. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Zhang, X. Method for Establishing a Traveling Wave Sound Field with Adaptive Control in a Water-Filled Sound Tube. Appl. Sci. 2021, 11, 5785. [Google Scholar] [CrossRef]
- Sani, S.; Saad, M.H.; Jamaludin, N.; Ismail, M.P.; Mohd, S.; Mustapha, I.; Masenwat, N.; Amran, T.S.T.; Ahmad, M.H.A.M. A study of PC-based ultrasonic goniometer system of surface properties and characterization of materials. IOP Conf. Ser. Mater. Sci. Eng. 2018, 298, 012044. [Google Scholar] [CrossRef]
- Rajaram, P.V.; Prakash, M. Intelligent deep learning based bidirectional long short term memory model for automated reply of e-mail client prototype. Pattern Recognit. Lett. 2021, 152, 340–347. [Google Scholar]
- Ahmed, G.; Islam, S.; Ali, I.; Hayder, I.A.; Ahmed, A.I.A.; Talha, M.; Alshamrani, S.S.; Ibrahim, A.A.A. Adaptive Power Control Aware Depth Routing in Underwater Sensor Networks. Comput. Mater. Contin. 2021, 69, 1301–1322. [Google Scholar] [CrossRef]
- Wang, K.; Gao, H.; Xu, X.; Jiang, J.; Yue, D. An energy-efficient reliable data transmission scheme for complex environmental monitoring in underwater acoustic sensor networks. IEEE Sens. J. 2015, 16, 4051–4062. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Guizani, M. An attack-resistant trust model based on multidimensional trust metrics in underwater acoustic sensor network. IEEE Trans. Mob. Comput. 2015, 14, 2447–2459. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization algorithms of underwater wireless sensor networks: A survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef]
- Lee, S.; Kim, D. Underwater hybrid routing protocol for UWSNs. In Proceedings of the Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 472–475. [Google Scholar]
- Yuan, F.; Zhan, Y.; Wang, Y. Data Density Correlation Degree Clustering Method for Data Aggregation in WSN. IEEE Sens. J. 2013, 14, 1089–1098. [Google Scholar] [CrossRef]
- Agarwal, R.; Kumar, S.; Hegde, R.M. Algorithms for crowd surveillance using passive acoustic sensors over a multimodal sensor network. IEEE Sens. J. 2014, 15, 1920–1930. [Google Scholar] [CrossRef]
- Ravikumar, C.V. Kala Praveen Bagadi, Design of MC-CDMA receiver using RBF network to mitigate MAI and nonlinear distortion. Neural Comput. Appl. 2019, 31, 1263–1273. [Google Scholar]
- Park, M.K.; Rodoplu, V. UWAN-MAC: An energy-efficient mac protocol for underwater acoustic wireless sensor networks. IEEE J. Ocean. Eng. 2007, 32, 710–720. [Google Scholar] [CrossRef]
- Domingo, M.C.; Prior, R. Energy analysis of routing protocols for underwater wireless sensor networks. Comput. Commun. 2008, 31, 1227–1238. [Google Scholar] [CrossRef]
- Ravikumar, C.V. Kala Praveen Bagadi, MC-CDMA receiver design using recurrent neural network for eliminating MAI and non linear distortion. Int. J. Commun. Syst. IJCS 2017, 10, e3328. [Google Scholar]
- Patil, M.S.A.; Mishra, M.P. Improved mobicast routing protocol to minimize energy consumption for underwater wireless sensor networks. Int. J. Res. Sci. Eng. 2017, 3, 197–204. [Google Scholar]
- Sathish, K.; CV, R.; Ab Wahab, M.N.; Anbazhagan, R.; Pau, G.; Akbar, M.F. Underwater Wireless Sensor Networks Performance Comparison Utilizing Telnet and Superframe. Sensors 2023, 23, 4844. [Google Scholar] [CrossRef]
- Alsulami, M.; Elfouly, R.; Ammar, R. A reliable underwater computing system. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–12 May 2021; pp. 467–472. [Google Scholar]
- Mohan, P.; Subramani, N.; Alotaibi, Y.; Alghamdi, S.; Khalaf, O.I.; Ulaganathan, S. Improved Metaheuristics-Based Clustering with Multihop Routing Protocol for Underwater Wireless Sensor Networks. Sensors 2022, 22, 1618. [Google Scholar] [CrossRef]
- Ahmedy, I.; Anisi, M.H.; Javaid, N.; Ali, I.; Khan, N.; Alsaqer, M.; Mahmood, H. A localization-free interference and energy holes minimization routing for underwater wireless sensor networks. Sensors 2018, 18, 165. [Google Scholar] [CrossRef]
- Pari, S.N.; Sathish, M.; Arumugam, K. An energy-efficient and reliable depth-based routing protocol for underwater wireless sensor network (ER-DBR). In Advances in Power Systems and Energy Management; Springer: Berlin/Heidelberg, Germany, 2018; pp. 451–463. [Google Scholar]
- Sathish, K.; Venkata, R.C.; Anbazhagan, R.; Pau, G. Review of Localization and Clustering in USV and AUV for Underwater Wireless Sensor Networks. Telecom 2023, 4, 43–64. [Google Scholar] [CrossRef]
- Sher, A.; Khan, A.; Javaid, N.; Ahmed, S.H.; Aalsalem, M.Y.; Khan, W.Z. Void hole avoidance for reliable data delivery in iot enabled underwater wireless sensor networks. Sensors 2018, 18, 3271. [Google Scholar] [CrossRef] [PubMed]
- Yahya, A.; Islam, S.U.; Akhunzada, A.; Ahmed, G.; Shamshirband, S.; Lloret, J. Towards Efficient Sink Mobility in Underwater Wireless Sensor Networks. Energies 2018, 11, 1471. [Google Scholar] [CrossRef]
- Zheng, H.; Zhang, C.; Wang, Y.; Chen, W.; Sladek, J.; Sladek, V. A local RBF collocation method for band structure computations of 2D solid/fluid and fluid/solid phononic crystals. Int. J. Numer. Methods Eng. 2016, 110, 467–500. [Google Scholar] [CrossRef]
- Zheng, H.; Fan, Z.; Li, J. Simulation of electromagnetic wave propagations in negative index materials by the localized RBF-collocation method. Eng. Anal. Bound. Elem. 2022, 136, 204–212. [Google Scholar] [CrossRef]
- Tu, H.; Wang, Y.; Liu, W.; Ma, X.; Xiao, W.; Lan, Q. A Chebyshev spectral method for normal mode and parabolic equation models in underwater acoustics. Math. Probl. Eng. 2020, 2020, 7461314. [Google Scholar] [CrossRef]
- Tu, H.; Wang, Y.; Lan, Q.; Liu, W.; Xiao, W.; Ma, S. A Chebyshev-Tau spectral method for normal modes of underwater sound propagation with a layered marine environment. J. Sound Vib. 2020, 492, 115784. [Google Scholar] [CrossRef]
- Reddy, G.N.; Ravikumar, C.V.; Rajesh, A. Literature review and research direction towards channel estimation and hybrid pre-coding in mmWave massive MIMO communication systems. J. Reliab. Intell. Environ. 2023, 9, 241–260. [Google Scholar] [CrossRef]
- Navabharat Reddy, G.; Ravikumar, C.V. Developing novel channel estimation and hybrid precoding in millimeter-wave communication system using heuristic-based deep learning. Energy 2023, 268, 126600. [Google Scholar] [CrossRef]
- Tu, H.; Wang, Y.; Ma, X.; Zhu, X. Applying the Chebyshev–Tau spectral method to solve the parabolic equation model of wide-angle rational approximation in ocean acoustics. J. Theor. Comput. Acoust. 2022, 30, 2150013. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values | Definition |
|---|---|---|
| f0 | 1000 [Hz] | Driving frequency |
| theta0 | 0 [deg] | Angle of incidence |
| c0 | 1414 [m/s] | Speed of sound in water |
| cs_poro | 130 [m/s] | Speed of slow shear waves in the poroelastic wave domains |
| lam0 | c0/f0 | Wavelength at f0 |
| rhoF | 1000 [kg/m3] | Fluid density |
| Kf | rhoF × c02 | Bulk modulus of fluid |
| muF | 1 × 10−3 [Pa·s] | Fluid viscosity |
| epsilonP | 0.47 | Porosity |
| a | 4 × 10−3 [cm] | Pore size parameter |
| tau0 | 1.25 | Tortuosity |
| Gc | G × (1 + i × logdec/pi) | Complex shear modulus of frame |
| W | lam0 | Domain width |
| H | 2 × lam0 | Domain height |
| Hpml | lam0/3 | PML height |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sathish, K.; Hamdi, M.; Chinthaginjala Venkata, R.; Alibakhshikenari, M.; Ayadi, M.; Pau, G.; Abbas, M.; Shukla, N.K. Acoustic Wave Reflection in Water Affects Underwater Wireless Sensor Networks. Sensors 2023, 23, 5108. https://doi.org/10.3390/s23115108
Sathish K, Hamdi M, Chinthaginjala Venkata R, Alibakhshikenari M, Ayadi M, Pau G, Abbas M, Shukla NK. Acoustic Wave Reflection in Water Affects Underwater Wireless Sensor Networks. Sensors. 2023; 23(11):5108. https://doi.org/10.3390/s23115108
Chicago/Turabian StyleSathish, Kaveripakam, Monia Hamdi, Ravikumar Chinthaginjala Venkata, Mohammad Alibakhshikenari, Manel Ayadi, Giovanni Pau, Mohamed Abbas, and Neeraj Kumar Shukla. 2023. "Acoustic Wave Reflection in Water Affects Underwater Wireless Sensor Networks" Sensors 23, no. 11: 5108. https://doi.org/10.3390/s23115108
APA StyleSathish, K., Hamdi, M., Chinthaginjala Venkata, R., Alibakhshikenari, M., Ayadi, M., Pau, G., Abbas, M., & Shukla, N. K. (2023). Acoustic Wave Reflection in Water Affects Underwater Wireless Sensor Networks. Sensors, 23(11), 5108. https://doi.org/10.3390/s23115108