
A Simultaneous Localization and Mapping System Using the Iterative Error State Kalman Filter Judgment Algorithm for Global Navigation Satellite System

Abstract
:1. Introduction
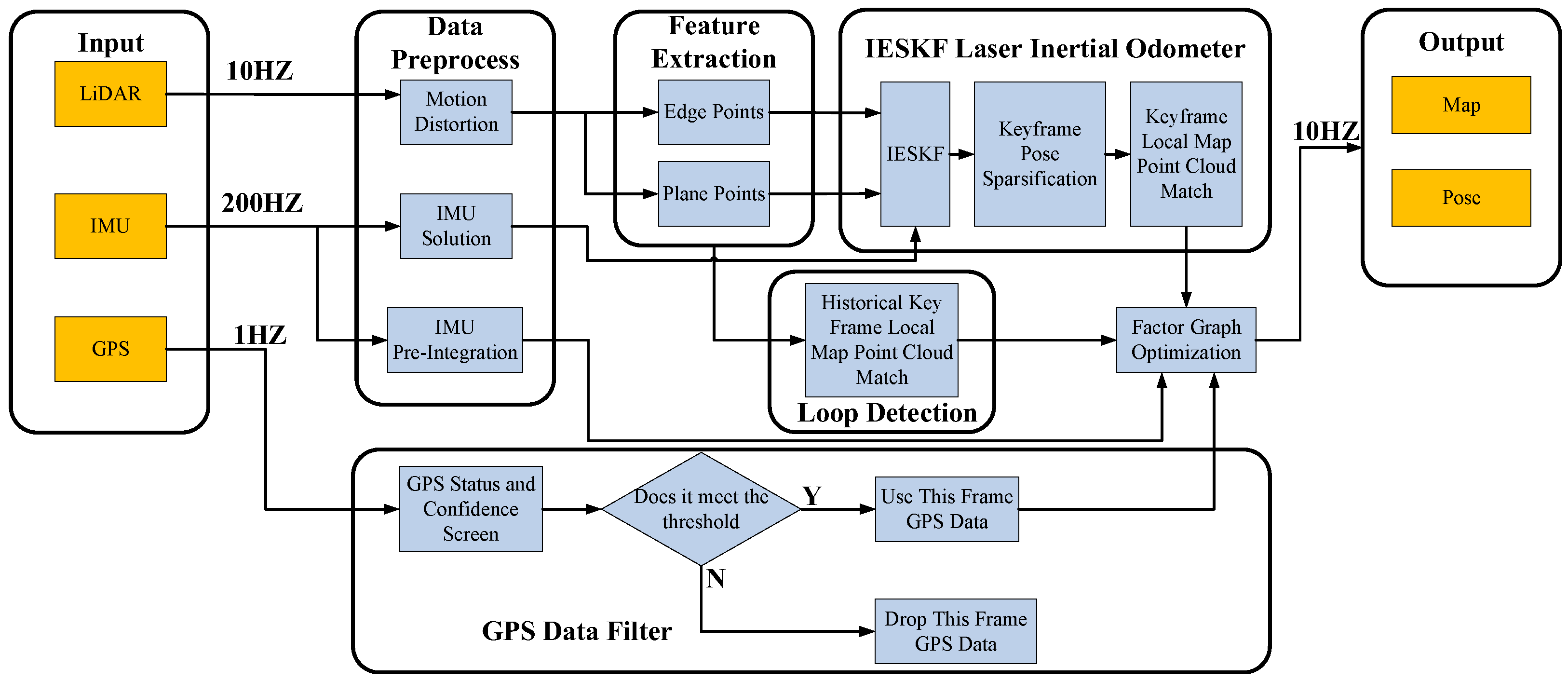
- We employ the IESKF algorithm to achieve tight coupling of laser rangefinder and IMU data, enabling robust pose estimation. This approach effectively integrates sensor data to improve the accuracy and stability of frontend pose estimation.
- We introduce a method for filtering out anomalous GPS data based on GPS state variables and confidence. This method effectively reduces the interference and errors caused by GPS data, thereby enhancing the localization performance of the SLAM system under GPS interruption.
- We utilize factor graph optimization to fuse the frontend-generated odometry, IMU, GPS, and loop closure detection modules. By constructing a factor graph, the system can leverage the information from each module during the optimization process, improving the overall localization accuracy and consistency of the SLAM system.
- The proposed SLAM framework’s localization accuracy improvements are tested and evaluated using GPS uninterrupted/interrupted tests on the KITTI dataset and our own experimental platform.
2. SLAM System
2.1. IESKF LiDAR Inertial Odometry Factor
- (1)
- Input the posterior state variables and covariance matrix output by the previous IESKF, the laser point cloud after motion compensation, and the IMU data collected during the current laser scan.
- (2)
- Predict the state variables and covariance matrix as shown in Equations (4) and (5). In Equation (4): denotes the generalized addition; and respectively represent the prior system state variables between the laser frames -th and -th when receiving IMU data at times and ; denotes the IMU sampling period; denotes the system state transition matrix; and and represent the IMU measurement values and their measurement noise at time . In Equation (5): represents the predicted covariance matrix at time ; represents the predicted state matrix at time ; represents the noise matrix; represents the noise covariance matrix; and represents the posterior covariance matrix of the laser -th frame.
- (3)
- Setting the initial value of the iteration count to 1, the state quantity of the iteration is .
- (4)
- Judge whether the absolute value of the difference between the state quantity obtained after one iteration and the previous iteration is less than the threshold , represented by the symbol in Formula (6), where denotes generalized subtraction. If it is less than the threshold , then repeat the following loop.
- (a)
- Calculate the Jacobian matrix of the error state vector at point using Formula (7), where represents the error state vector of -th frame. Use Formula (8) to update the prior covariance matrix during the iteration process.
- (b)
- Transform the laser point cloud into the world coordinate system, and calculate the residual equation and covariance matrix of the observation using Formulas (9) and (10), respectively. Here, and represent the coordinate sets of feature points after motion compensation for corner points and plane points , respectively, between -th frame and -th frame. The covariance matrix is represented using the formula from LINS, represents the pose transformation of the laser between -th frame and -th frame, and denotes the skew-symmetric matrix of the variable.
- (c)
- Update the state variables and Kalman gain using Formulas (11) and (12).
- (5)
- Output the posterior state quantity and posterior covariance using Equations (13) and (14).
2.2. GPS Factor
2.3. Loop Detection Factor
2.4. IMU Pre-Integration
3. Experimental
3.1. KITTI Dataset Testing and Evaluation
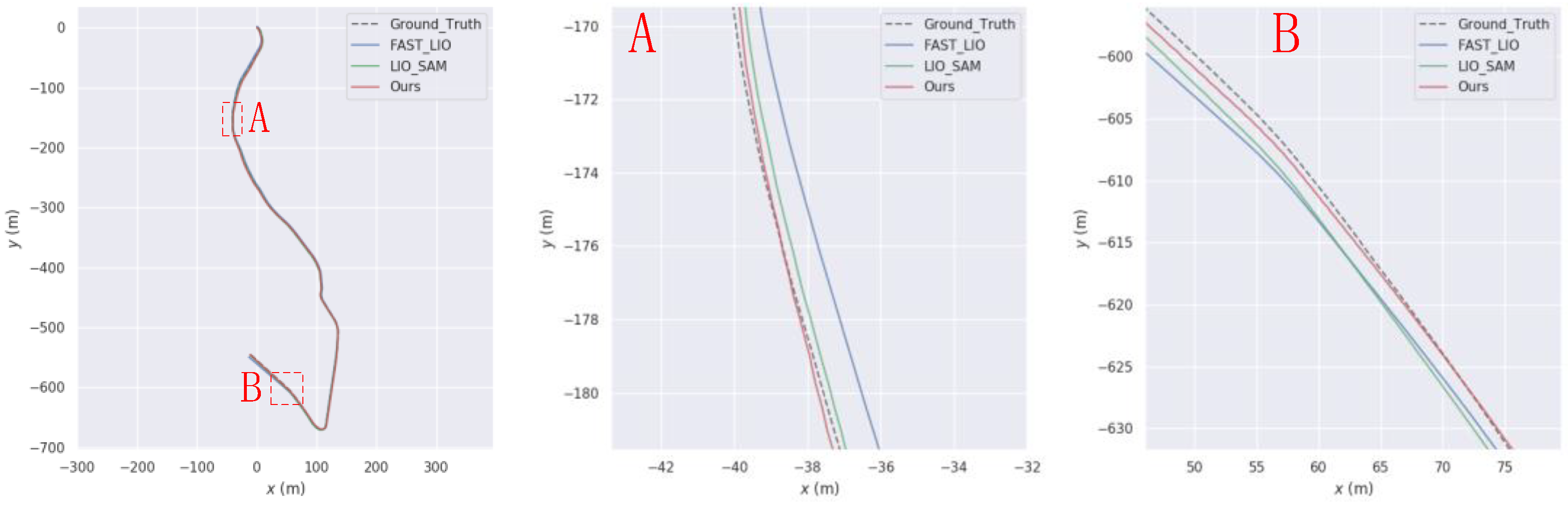
3.1.1. GPS Uninterrupted Experiment
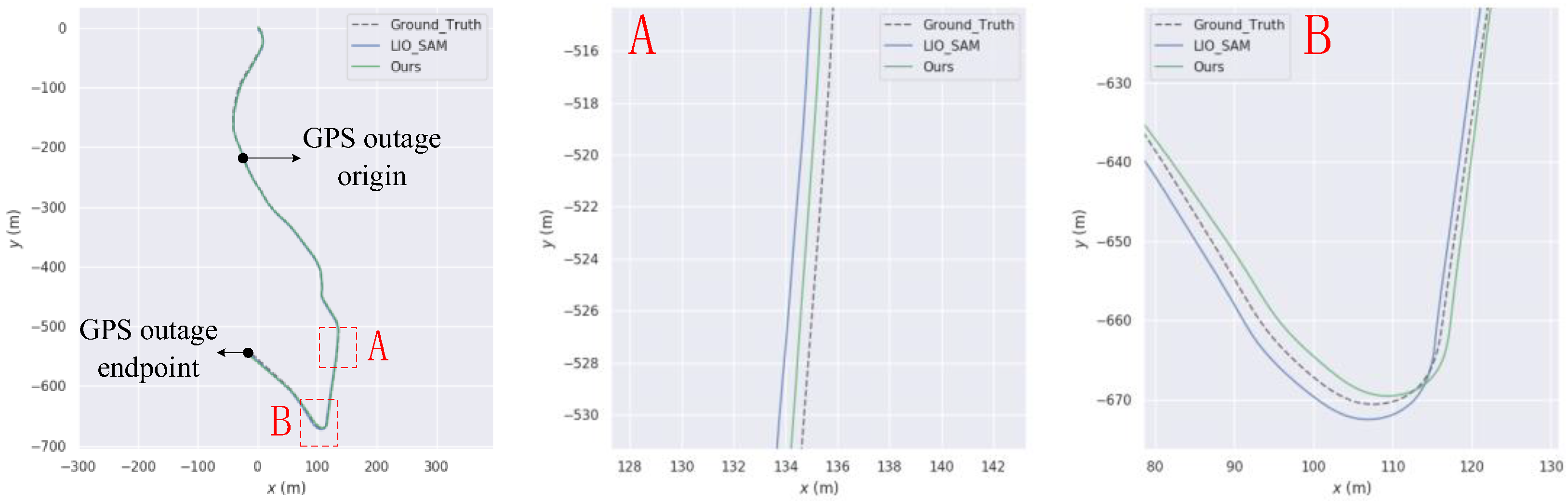
3.1.2. GPS Interrupted Experiment
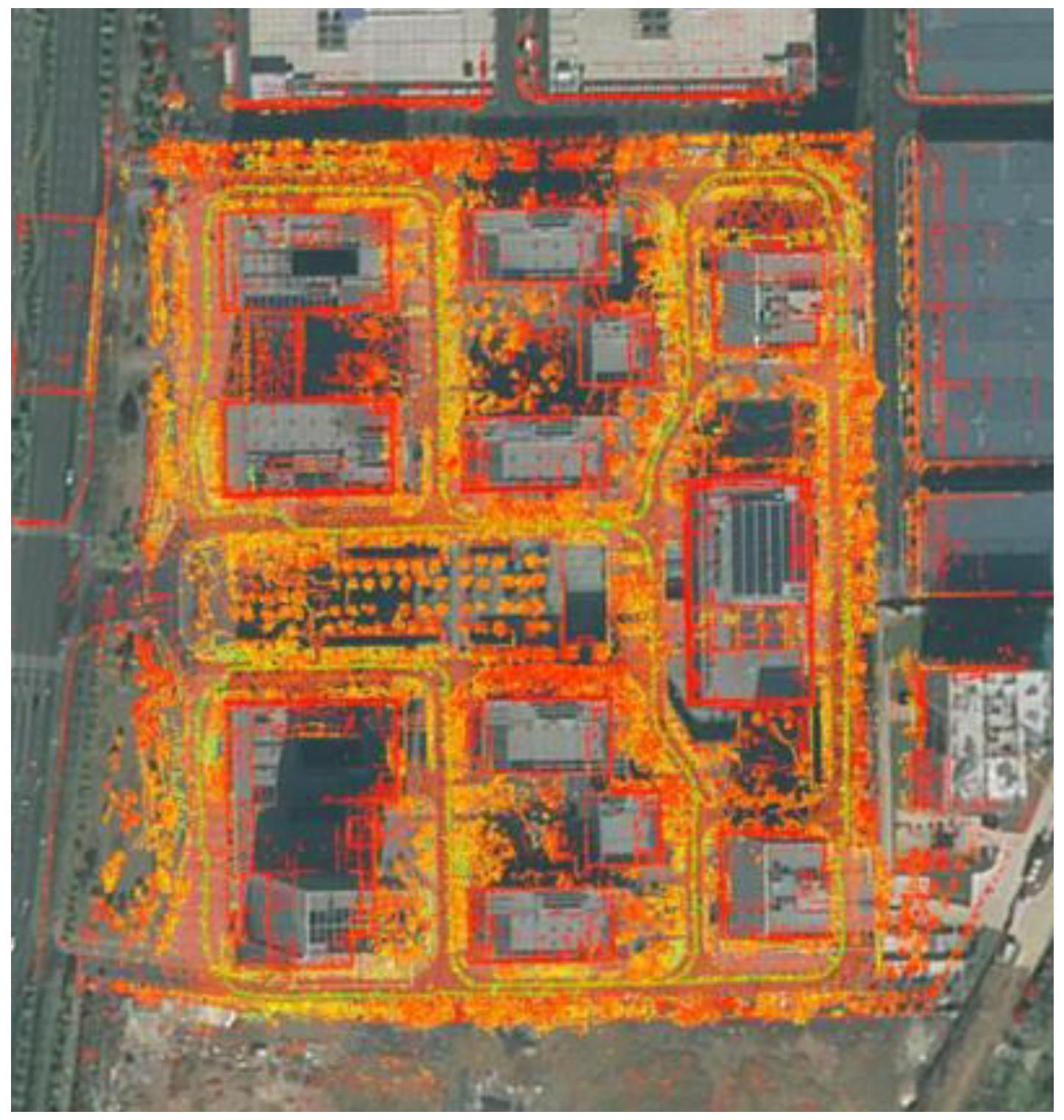
3.2. Experiments on a Real Platform
3.2.1. GPS Uninterrupted Experiment
3.2.2. GPS Interrupted Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, J.; You, B.; Ding, L.; Yu, X.; Li, W.; Zhang, T.; Gao, H. Dual-Master/Single-Slave Haptic Teleoperation System for Semiautonomous Bilateral Control of Hexapod Robot Subject to Deformable Rough Terrain. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2435–2449. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robots 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhang, W.; Zhang, K.; Zhang, Q.; Li, X.; Jiang, Z.; Ren, X.; Yuan, Y. GPS satellite differential code bias estimation with current eleven low earth orbit satellites. J. Geod. 2021, 95, 76. [Google Scholar] [CrossRef]
- You, B.; Li, J.; Ding, L.; Xu, J.; Li, W.; Li, K.; Gao, H. Semi-Autonomous Bilateral Teleoperation of Hexapod Robot Based on Haptic Force Feedback. J. Intell. Robot. Syst. 2018, 91, 583–602. [Google Scholar] [CrossRef]
- Schmid, K.; Lutz, P.; Tomíc, T.; Mair, E.; Hirschmüller, H. Autonomous vision-based microair vehicle for indoor and outdoor navigation. J. Field Robots 2014, 31, 537–570. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [Green Version]
- Shamsudin, A.U.; Ohno, K.; Hamada, R.; Kojima, S.; Westfechtel, T.; Suzuki, T.; Okada, Y.; Tadokoro, S.; Fujita, J.; Amano, H. Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR. Robomech. J. 2018, 5, 7. [Google Scholar] [CrossRef] [Green Version]
- Abdelaziz, N.; El-Rabbany, A. An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments. Sensors 2022, 22, 4327. [Google Scholar] [CrossRef]
- Aboutaleb, A.; El-Wakeel, A.S.; Elghamrawy, H.; Noureldin, A. LiDAR/RISS/GNSS dynamic integration for land vehicle robust positioning in challenging GNSS environments. Remote Sens. 2020, 12, 2323. [Google Scholar] [CrossRef]
- Zhao, S.; Fang, Z.; Li, H.; Scherer, S. A Robust Laser-Inertial Odometry and Mapping Method for Large-Scale Highway Environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1285–1292. [Google Scholar] [CrossRef]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, F. Fast-LIO: A fast, robust LiDAR-inertial odometry package by tightly-coupled iterated Kalman filter. IEEE Robots Autom. Lett. 2021, 6, 3317–3324. [Google Scholar] [CrossRef]
- Xu, W.; Cai, Y.; He, D.; Lin, J.; Zhang, F. Fast-lio2: Fast direct lidar-inertial odometry. IEEE Trans. Robots 2022, 38, 2053–2073. [Google Scholar] [CrossRef]
- Li, J.; You, B.; Ding, L.; Xu, J.; Li, W.; Chen, H.; Gao, H. A Novel Bilateral Haptic Teleoperation Approach for Hexapod Robot Walking and Manipulating with Legs. Robot. Auton. Syst. 2018, 108, 1–12. [Google Scholar] [CrossRef]
- Bai, C.; Xiao, T.; Chen, Y.; Wang, H.; Zhang, F.; Gao, X. Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. IEEE Robots Autom. Lett. 2022, 7, 4861–4868. [Google Scholar] [CrossRef]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM Integrated Navigation System Based on Graph Optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef] [Green Version]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. Isprs J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the IEEE International Conference Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar] [CrossRef]
- Chang, L.; Niu, X.; Liu, T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors 2020, 20, 4702. [Google Scholar] [CrossRef]
- Pierzchała, M.; Giguère, P.; Astrup, R. Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM. Comput. Electron. Agric. 2018, 145, 217–225. [Google Scholar] [CrossRef]
- Google Cartographer. Available online: https://google-cartographer.readthedocs.io/en/latest/ (accessed on 9 July 2018).
- Zhang, J.; Singh, S. Low-drift and Real-time Lidar Odometry and Mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robots Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Xue, G.; Wei, J.; Li, R.; Cheng, J. LeGO-LOAM-SC: An Improved Simultaneous Localization and Mapping Method Fusing LeGO-LOAM and Scan Context for Underground Coalmine. Sensors 2022, 22, 520. [Google Scholar] [CrossRef]
- Oelsch, M.; Karimi, M.; Steinbach, E. R-LOAM: Improving LiDAR odometry and mapping with point-to-mesh features of a known 3D Reference Object. IEEE Robots Autom. Lett. 2021, 6, 2068–2075. [Google Scholar] [CrossRef]
- Wang, H.; Wang, C.; Chen, C.L.; Xie, L. F-LOAM: Fast LiDAR odometry and mapping. In Proceedings of the 2021 IEEE/RSJ International Conference Intelligent Robots and Systems (IROS) IEEE, Prague, Czech Republic, 27 September–1 October 2021; pp. 4390–4396. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled LiDAR inertial odometry via smoothing and mapping. In Proceedings of the 2020 IEEE/RSJ International Conference Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5135–5142. [Google Scholar] [CrossRef]
- Li, T.; Pei, L.; Xiang, Y.; Wu, Q.; Xia, S.; Tao, L.; Guan, X.; Yu, W. P3-LOAM: PPP/LiDAR loosely coupled SLAM with accurate covariance estimation and robust RAIM in urban canyon environment. IEEE Sensors J. 2021, 21, 6660–6671. [Google Scholar] [CrossRef]
- Kaess, M.; Johannsson, H.; Roberts, R.; Ila, V.; Leonard, J.; Dellaert, F. iSAM2: Incremental smoothing and mapping with fluid relinearization and incremental variable reordering. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3281–3288. [Google Scholar] [CrossRef]
- He, J.; Sun, C.; Zhang, B.; Wang, P. Adaptive error-state Kalman filter for attitude determination on a moving platform. IEEE Trans. Instrum. Meas. 2021, 70, 9513110. [Google Scholar] [CrossRef]
- Evo: Python Package for the Evaluation of Odometry and SLAM. Available online: https://github.com/MichaelGrupp/evo (accessed on 5 June 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Method | Max (m) | Mean (m) | Median (m) | Min (m) |
|---|---|---|---|---|---|
| 05 | Ours | 1.572958 | 0.555240 | 0.623827 | 0.054046 |
| LIO-SAM | 1.140164 | 0.604368 | 0.666729 | 0.050848 | |
| FAST-LIO | 12.143285 | 5.453287 | 6.046867 | 0.743559 | |
| 07 | Ours | 1.333466 | 0.555258 | 0.605827 | 0.079949 |
| LIO-SAM | 1.323349 | 0.617591 | 0.665901 | 0.147816 | |
| FAST-LIO | 4.248161 | 2.376953 | 2.522683 | 0.456325 | |
| 10 | Ours | 2.751671 | 1.146823 | 1.293698 | 0.262802 |
| LIO-SAM | 5.528663 | 1.544244 | 1.914991 | 0.140108 | |
| FAST-LIO | 5.772416 | 2.933960 | 3.189745 | 0.497090 |
| Sequence | Method | Max (m) | Mean (m) | Median (m) | Min (m) |
|---|---|---|---|---|---|
| 05 | Ours | 2.936086 | 1.242616 | 1.392347 | 0.177911 |
| LIO-SAM | 4.969321 | 1.750427 | 1.939206 | 0.051103 | |
| 07 | Ours | 1.272413 | 0.667964 | 0.723489 | 0.139385 |
| LIO-SAM | 2.237385 | 0.775331 | 0.872355 | 0.135207 | |
| 10 | Ours | 2.978839 | 1.422265 | 1.524391 | 0.331625 |
| LIO-SAM | 6.073832 | 1.803528 | 2.169900 | 0.122156 |
| Method | Max (m) | Mean (m) | Median (m) | Min (m) |
|---|---|---|---|---|
| Ours | 7.827892 | 3.801397 | 4.189983 | 0.245139 |
| LIO-SAM | 15.985649 | 4.853936 | 5.585050 | 0.854267 |
| FAST-LIO | 22.136492 | 8.540459 | 10.115659 | 0.788699 |
| Time(s) | Method | Max (m) | Mean (m) | Median (m) | Min (m) |
|---|---|---|---|---|---|
| 50 | Ours | 7.955014 | 4.338442 | 4.700273 | 0.245139 |
| LIO-SAM | 15.671642 | 5.396973 | 6.765650 | 0.854267 | |
| 100 | Ours | 7.955014 | 4.338442 | 4.700273 | 0.245139 |
| LIO-SAM | 15.671642 | 5.396973 | 6.765650 | 0.854267 | |
| 200 | Ours | 7.927294 | 4.952018 | 5.397438 | 0.245139 |
| LIO-SAM | 15.90683 | 5.630523 | 7.022866 | 0.854267 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, B.; Zhong, G.; Chen, C.; Li, J.; Ma, E. A Simultaneous Localization and Mapping System Using the Iterative Error State Kalman Filter Judgment Algorithm for Global Navigation Satellite System. Sensors 2023, 23, 6000. https://doi.org/10.3390/s23136000
You B, Zhong G, Chen C, Li J, Ma E. A Simultaneous Localization and Mapping System Using the Iterative Error State Kalman Filter Judgment Algorithm for Global Navigation Satellite System. Sensors. 2023; 23(13):6000. https://doi.org/10.3390/s23136000
Chicago/Turabian StyleYou, Bo, Guangjin Zhong, Chen Chen, Jiayu Li, and Ersi Ma. 2023. "A Simultaneous Localization and Mapping System Using the Iterative Error State Kalman Filter Judgment Algorithm for Global Navigation Satellite System" Sensors 23, no. 13: 6000. https://doi.org/10.3390/s23136000
APA StyleYou, B., Zhong, G., Chen, C., Li, J., & Ma, E. (2023). A Simultaneous Localization and Mapping System Using the Iterative Error State Kalman Filter Judgment Algorithm for Global Navigation Satellite System. Sensors, 23(13), 6000. https://doi.org/10.3390/s23136000