1. Introduction
The direct drive technology of permanent synchronous motors (PMSMs) has been widely applied in ground-based, large-aperture telescopes, including the 8.2 m Subaru telescope in Japan, the 10.4 m GTC telescope in Spain, and the four 8.2 m VLT telescopes in the European Southern Observatory, because of their advantages, such as their high power density and good low-speed performance [
1,
2]. As capability for deep space exploration and requirements for wide-field surveys grow, the apertures of ground-based telescopes are becoming larger and larger. Consequently, a direct drive PMSM servo system with higher driving capability and tracking accuracy is required. For the main axis servo control of large telescopes, the following major challenges have been confronted in engineering practice:
- (i)
As the telescope diameter increases, the mechanical resonance frequency decreases, and the control bandwidth becomes narrower. In addition, disturbances caused by cogging torque, nonlinear friction, and random increases in wind load make it difficult for classical PI controls to meet the requirements of high performance, and the final image quality will be bad if the controller does not reject the disturbances adequately.
- (ii)
Wide-field survey telescopes usually work in a searching and tracking mode; that is, the telescope first points to the target area, takes a long exposure picture, then subsequently points to the next target area, takes another long exposure picture again, and so on. Therefore, fast and smooth pointing without overshooting the target area is crucial to improve the efficiency throughout the whole night. So, the transition process must be planned according to the acceleration capacity.
- (iii)
Many advanced and complex control algorithms have been developed; however, because their design or parameter-tuning methods are too complicated, they are rarely used as widely as PID in engineering practice. Because of its simple design and easily tuned controller, it is best to not change the classical three-closed-loop control structure, as it is more favorable to engineers.
To handle the problems encountered in telescope servo control, many improved PID control methods have been developed, such as the anti-windup internal PID [
3] and variable structure PID [
4]. These methods were designed to solve the contradiction between speed and overshooting. However, there is still much room for further improvement in the high-precision tracking and disturbance rejection performance, so a new disturbance-rejection PID was proposed in [
5]. The authors of [
6] analyzed internal and external disturbances in PMSM drives and summarized disturbance estimation and attenuation techniques. In telescope servo systems, the internal disturbance mainly includes cogging torque and nonlinear friction, and the external disturbance mainly includes wind load.
Han proposed an active disturbance rejection controller (ADRC) [
7,
8] that included TD, NLSEF, and ESO. ESO is a new concept of estimating the total disturbance without distinguishing between internal and external disturbances. Gao analyzed the control paradigm of ADRC and introduced a linearization method to achieve linear active disturbance rejection control (LADRC), which enabled engineers to tune the LADRC parameters based on the concept of bandwidth [
9], significantly promoting the application of ADRC. The authors of [
10] applied LADRC to the speed loop control of a small telescope servo system, and LADRC had the same bandwidth as PI. The LADRC effectively suppressed the friction and cogging torque fluctuations; thus, the low-speed tracking precision was improved compared with PI. However, for small telescopes, the resonant frequency is several times higher than that of large telescopes, and the LADRC parameters were set to wo = 500 and wc = 100 in the paper, so the bandwidth of the LESO was hardly limited by the resonant frequency. Moreover, ref. [
11] applied LADRC to the speed loop of a 1.2-m telescope. The closed bandwidth of the speed loop was designed to be 13.7 Hz; however, the LADRC parameters were only set to wo = 40 and wc = 70, and the bandwidth of the LESO was obviously limited. It is thus necessary to enhance the disturbance rejection ability of the speed loop to achieve higher tracking precision under limited bandwidths.
An overview of the disturbance-observer-based control (DOBC) method was provided in [
12]. In 2020, a survey of the major results from studies over the past 35 years on DOB-based robust control was presented in [
13]. Robust control techniques can be divided into two categories: suppressing disturbances via feedback control, such as PID and internal model control (IMC) [
14], and canceling disturbances via feedforward control, such as DOBC [
15] and ADRC [
16]. It was theoretically and experimentally proven that the robustness and performance of a control system can be independently adjusted using a DOB and a performance controller, respectively, which is referred to as the two-degrees-of-freedom (2-DoF) control structure [
17]. Some control methods, such as PID and sliding mode control (SMC) [
18], have been combined with DOB to apply the 2-DoF control structure to improve the performance of systems. A cascade acceleration feedback control (AFC) enhanced by a disturbance observation and compensation (DOC) method was proposed to improve the tracking precision of telescope systems under disturbances [
19]. However, high-precision acceleration sensors were used, which increased the complexity and cost of the system. To overcome the wind load disturbance on large radio telescopes, LQG and
control methods [
20,
21] were designed, and they demonstrated better disturbance rejection performance than PID, however, at the expense of phase margin stability. In addition, their tuning for antenna tracking purposes is a tricky process.
The nonlinear disturbance observer (NDOB) method was first proposed to estimate the disturbance torque caused by unknown friction in nonlinear robotic manipulators [
22]. Subsequently, an NDOB with an exponential rate of convergence was introduced by constructing a nonlinear observer gain function [
23]. To overcome the limitations of linear DOBs in the presence of highly nonlinear and coupled dynamics, researchers have started to investigate NDOBs for systems with nonlinear dynamics during the past decade. For example, ref. [
24] demonstrated the design and application of some nonlinear disturbance observers. To strengthen the disturbance rejection ability of flexible air-breathing hypersonic vehicles, a new NDOB was constructed through an NTD-based on the hyperbolic sine function to enhance the back-stepping controller’s robustness [
25]. A new NDOB is exploited and, combining it with back-stepping, was utilized to achieve robust control of velocity and altitude [
26]. They demonstrated that the NDOB constructed by different nonlinear methods achieves robustness. However, the NDOB in [
25,
26] has too many parameters to be adjusted, which is not conducive to use in engineering practice.
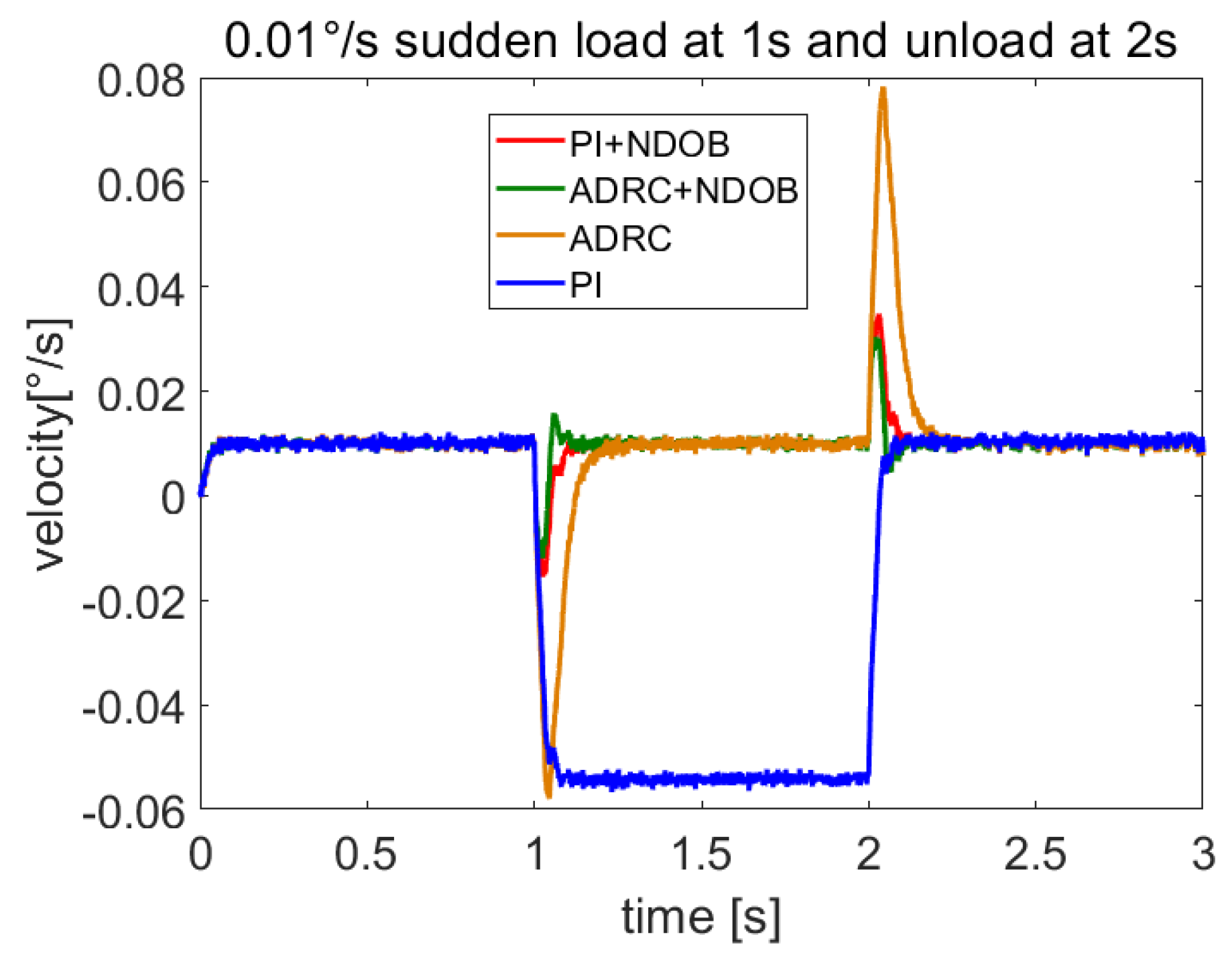
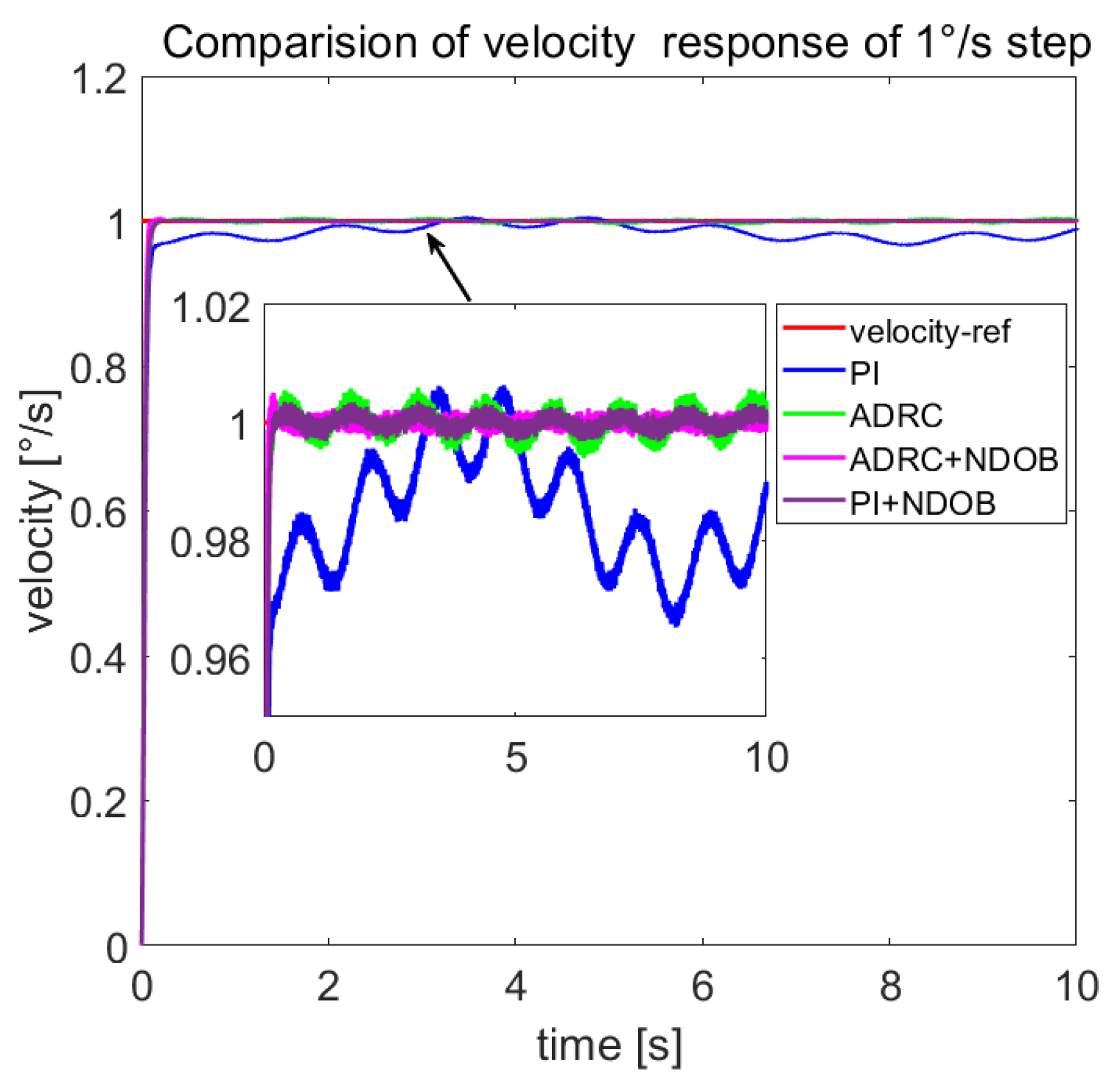
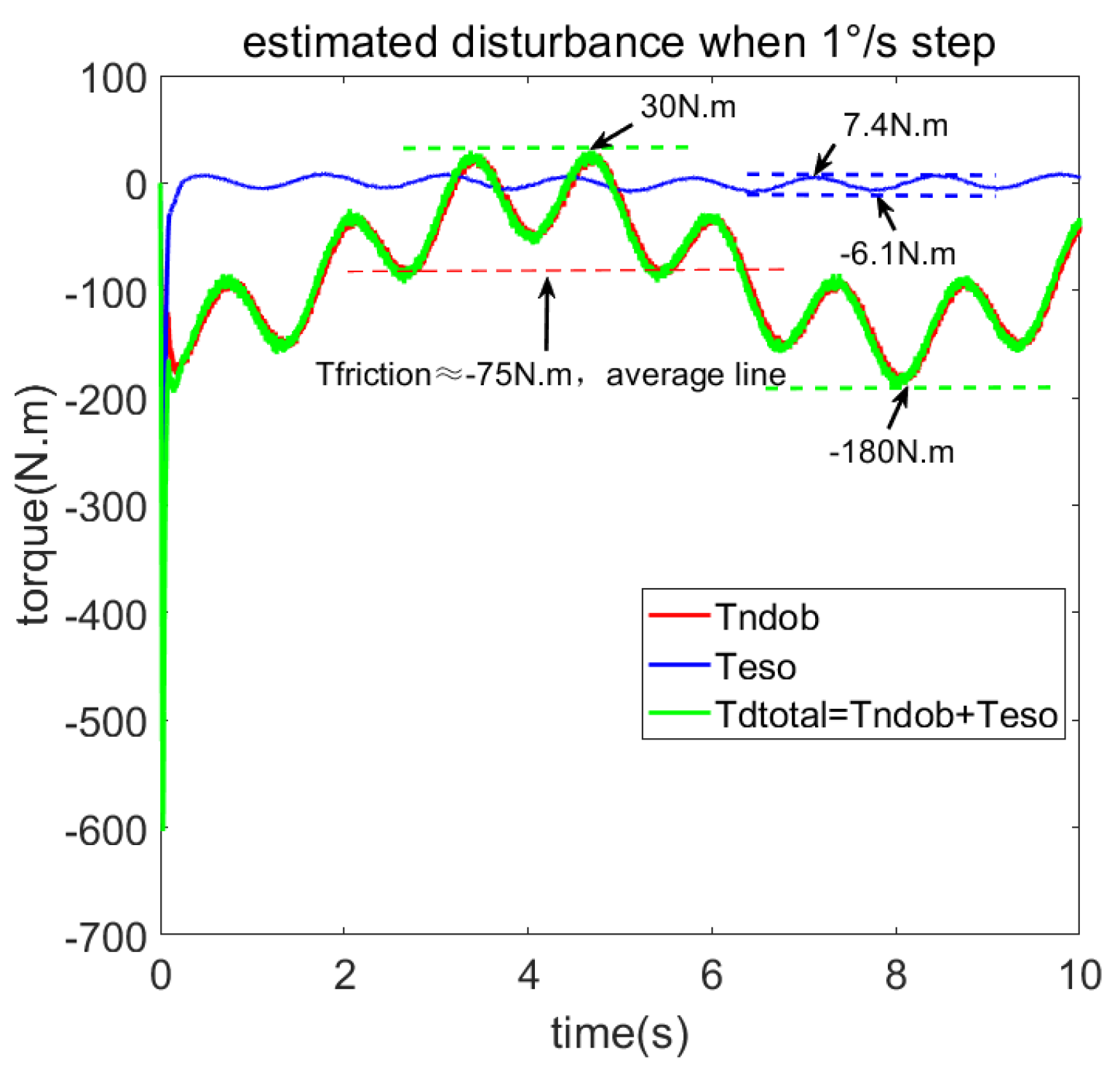
In this study, an NDOB with an exponential rate of convergence was developed which only required tuning for its gain parameter. On the basis of the classic three-closed-loop control structure of telescope servo system, a novel cascade anti-disturbance structure (NCADS) with an LADRC on the speed loop and a nonlinear disturbance observer (NDOB) on the current loop was proposed. Combining LADRC with NDOB solved the anti-disturbance problems under limited bandwidths. The inner current loop is much faster than the outer speed loop, so the dominant disturbance was firstly compensated for by the NDOB through feedforwarding it to the current reference without acceleration sensors, and then the residual disturbance was rejected by the LADRC of the speed loop, which lightened the burden of the LESO. The NCADS method achieves better anti-disturbance performance compared to the conventional proportional integral (PI) + NDOB and LADRC method.
The tracking differentiator (TD) is an important component of ADRC [
8]. It has two main functions: one is to construct differentiators, and the other is to plan the transition process. Many previous studies on TDs mainly focus on constructing differentiators [
27,
28,
29]; however, there are rarely studies about the use of TDs to plan transition processes. A variable parameter linear tracking differentiator (VLTD) with speed and acceleration bounds was applied in large ground-based telescopes in [
30], which achieved almost the same performance as the NTD. In the study, an improved NTD with upper bounds on speed and acceleration was proposed to smoothen and speed up the position response and was shown to have better performance for planning transition processes than the NTD.
Simulations and experiments of the proposed control method demonstrated better performance on the main axis control of a 2.5-m telescope driven by PMSMs. The main contributions of this paper are summarized as follows:
- (1)
The proposed NCADS with an LADRC on the speed loop and an NDOB on the current loop enhances the anti-disturbance performance under limited bandwidth.
- (2)
The improved NTD with the upper bounds on speed and acceleration achieves a fast and smooth transition process for the position loop.
- (3)
The proposed method has few parameters and is simple to tune based on control bandwidth, which makes it easy for engineering applications.
The remainder of this paper is organized as follows:
Section 2 highlights the dynamic models and controller design.
Section 3 presents the simulation results and analysis. The experimental results and discussion are presented in
Section 4. Finally, the conclusions of the study are provided in
Section 5.
2. Servo Control System Design of a Large Ground-Based Telescope
Because the servo systems for the azimuth and elevation axes of a telescope are independent of each other, in this study, the elevation axis of a telescope was considered as an example.
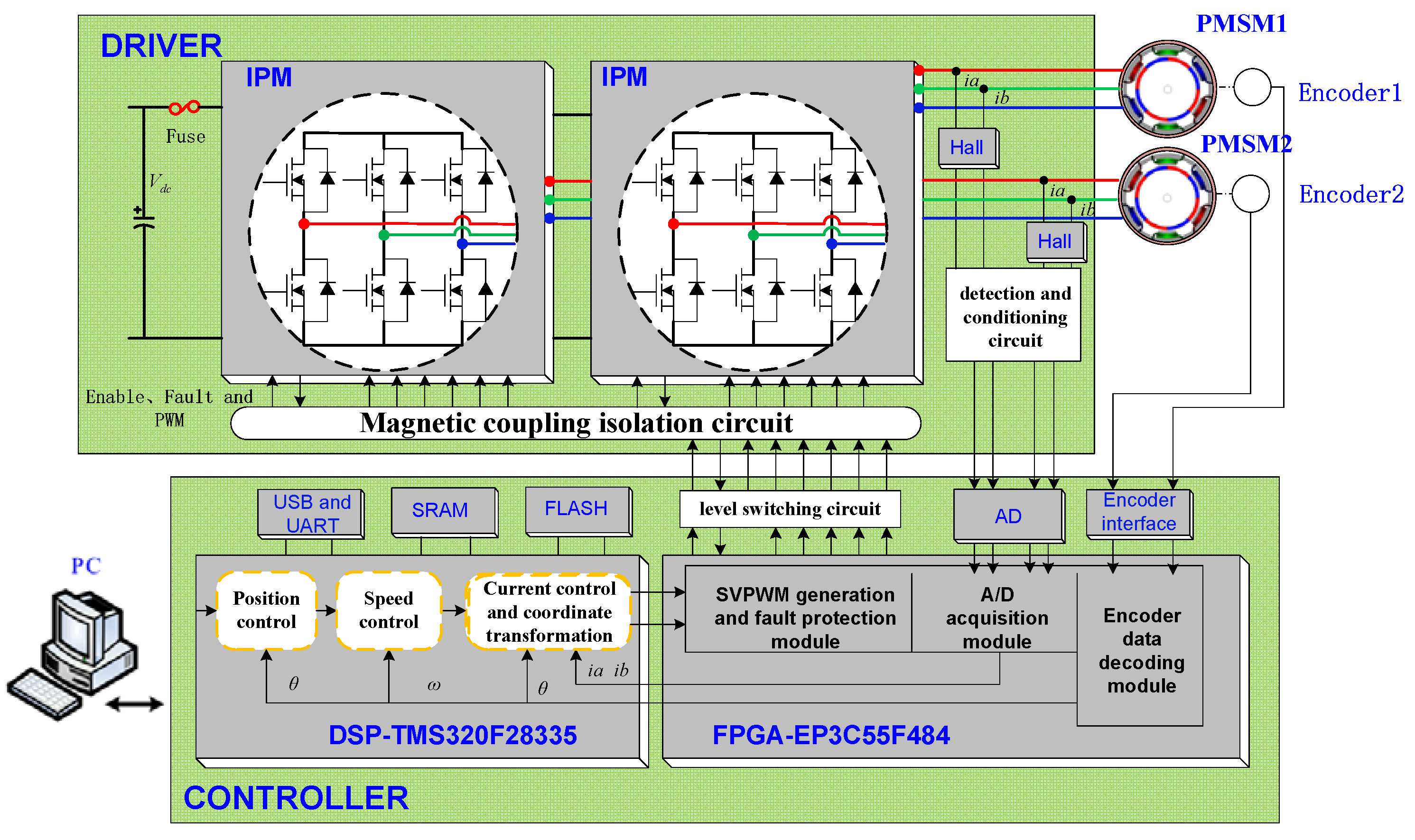
Figure 1 shows the diagram of a typical telescope servo control system, which is mainly composed of a position loop, a speed loop, a current loop, an inverter, a PMSM, and the telescope. The transition process of the position loop is based on the improved nonlinear tracking differentiator (NTD), which generates the reference position and velocity according to the maximum speed and acceleration allowed by the telescope. The smoothed position reference is used as the new command, and the speed reference is used to feedforward speed. The linear active disturbance rejection control (LADRC) is used on the speed loop, and the linear extended state observer (LESO) estimates and compensates the disturbance. Moreover, the conventional proportional integral (PI) control is used on the current loop. Although the use of acceleration information can improve the tracking performance of the telescope, a high-precision acceleration sensor is expensive and requires high installation accuracy. Therefore, to improve the servo performance without an acceleration sensor, an NDOB is designed to estimate and compensate for the disturbance. Since the NDOB compensates for most of the disturbance through feedforward q-axis current command, the LESO only needs to estimate the residual disturbance on the outer speed loop. The ADRC + NDOB method has a better anti-disturbance performance, and therefore the speed loop can achieve higher low-speed tracking precision under disturbances. Because the control bandwidth of the speed loop is limited by the resonant frequency of the telescope, the design of the structural filter is necessary, for which the reader is referred to [
31], as it is not covered here.
2.1. Mathematical Model of Vector Control for PMSM
Ground-based, large-aperture telescope servo systems are mainly used in high-precision and low-speed applications, and a surface mount PMSM is generally used. The mathematical model of a PMSM in the d–q coordinate system is expressed as follows.
Electromagnetic torque equation:
Motion equation:
where
and
are the voltages;
and
are the currents; and
and
are the inductance along the
d and
q axes, respectively; furthermore,
.
is the phase resistance of the stator;
is the permanent magnet flux;
is the number of pole pairs;
is the torque coefficient;
is the electrical angular speed of rotor rotation;
is the mechanical angular speed of rotor rotation; and
.
is the load torque, and
B is the coefficient of viscous friction.
2.2. Design of PI Controller of Current Loop
The AC servo system of the 2.5-m-aperture telescope has a low-speed application and usually adopts the cascade control of the position, speed, and current. The inner current loop has a higher bandwidth than the outer loops of speed and position, and the PI control can meet the requirements for current response. The vector control method is adopted, and the influence of the back electromotive force is ignored. The open-loop transfer function for the current loop is given as follows:
According to the type-I system settings,
, the closed-loop transfer function of the current loop is given as
The appropriate bandwidth of the current loop can be designed by adjusting proportional gain . For a 2.5-m telescope, the closed-loop bandwidth of the current loop is about 100 Hz.
After the current loop is set, ignoring the influence of the disturbance torque, the transfer function of the controlled object on the speed loop is given as follows:
For large-aperture telescopes, the current loop has a much higher bandwidth than the speed loop. By ignoring its time constant, the speed loop can be further simplified into a first-order system, as follows:
The current is used as the system input
u, the mechanical angular speed is used as the system output
, and a random disturbance
w is introduced. The system parameter is denoted by
, and the system control gain is denoted by
. Thus, the speed loop model becomes
Considering the control gain error, the controller gain b is introduced to obtain
2.3. Design of the NDOB for Feedforward Compensation on the Current Loop
The total system disturbance is denoted as
. The torque disturbance of the servo system for the telescope includes friction, cogging torque, wind load, and random disturbance. The total disturbance includes the internal and external disturbances of the system, including the known and unknown parts. The system model can be expressed as follows:
Because the total disturbance cannot be measured directly, it must be estimated by the disturbance observer (DOB) as follows:
Generally, there is no prior knowledge of the differential of the disturbance, which changes slowly with respect to the dynamic characteristics of the DOB, assuming
. The error of the DOB is given by
The DOB error satisfies the following constraints.
The DOB converges exponentially, and the convergence rate can be determined by the gain K. In practical engineering, it is difficult to obtain the acceleration signal by differentiating the speed because of the signal noise. Therefore, the DOB cannot estimate disturbance well, but the NDOB can be designed without the acceleration information.
The auxiliary parameter of the NDOB is defined as
Differentiating both sides of Equation (
15) and combining with Equation (
11), we have
The convergence of NDOB is proven below:
We also obtain Equation (
14) and solve it as follows:
Since the value of
is bounded,
will converge exponentially, and the convergence rate can be determined by gain
K. A larger value of
K provides a larger range of estimated disturbance frequencies but results in a control system that is more sensitive to noise. Thus, the disturbance
f can be estimated by Equation (
17) of the NDOB without acceleration information.
2.4. Design of the LADRC for the Speed Loop
After the disturbance is compensated for by the NDOB, the disturbance rejection performance is improved, and only the residual error
needs to be estimated instead of the total disturbance
f. This reduces the burden the ADRC takes on while estimating the disturbance. The system model can be expressed as follows:
Design a second-order LESO for the first-order system:
where
is the estimated value of the mechanical angular speed signal
,
is the estimation error of the LESO of the speed,
is the estimated value of the disturbance
, and
u is the system control output, which is a finite value in an actual physical system and its amplitude should therefore be limited.
and
are the LESO gains, which are determined by the angular frequency bandwidth
of the LESO. Thus, the eigenvalue of the LESO characteristic equation is
, which is expressed as follows:
The error feedback control law is designed as a proportional controller:
where
is the reference input of mechanical angular speed, and
is the proportional gain of the speed loop. The actual control output is obtained by disturbance feedforward compensation:
The closed-loop transfer function of the speed loop can be obtained by substituting Equations (23) and (24) into Equation (
21) by selecting the appropriate values of
and
:
where
. The controller gain
is determined according to the required angular frequency bandwidth
of the speed loop. In general,
is set to one-third of the mechanical anti-resonance frequency.
2.5. Design of the PI Controller for the Position Loop
The diagram of the position loop control is shown in
Figure 1. After the speed loop is set, the transfer function of the controlled object on the position loop is expressed as follows:
The position loop controller is designed as a PI controller. Considering the small integration gain, to simplify the analysis, the integral term is ignored. Thus, the closed-loop transfer function of the position loop becomes
If the proportional gain of the position loop is selected
, the transfer function of position loop is
The closed-loop angular frequency bandwidth of the position loop will be set as follows:
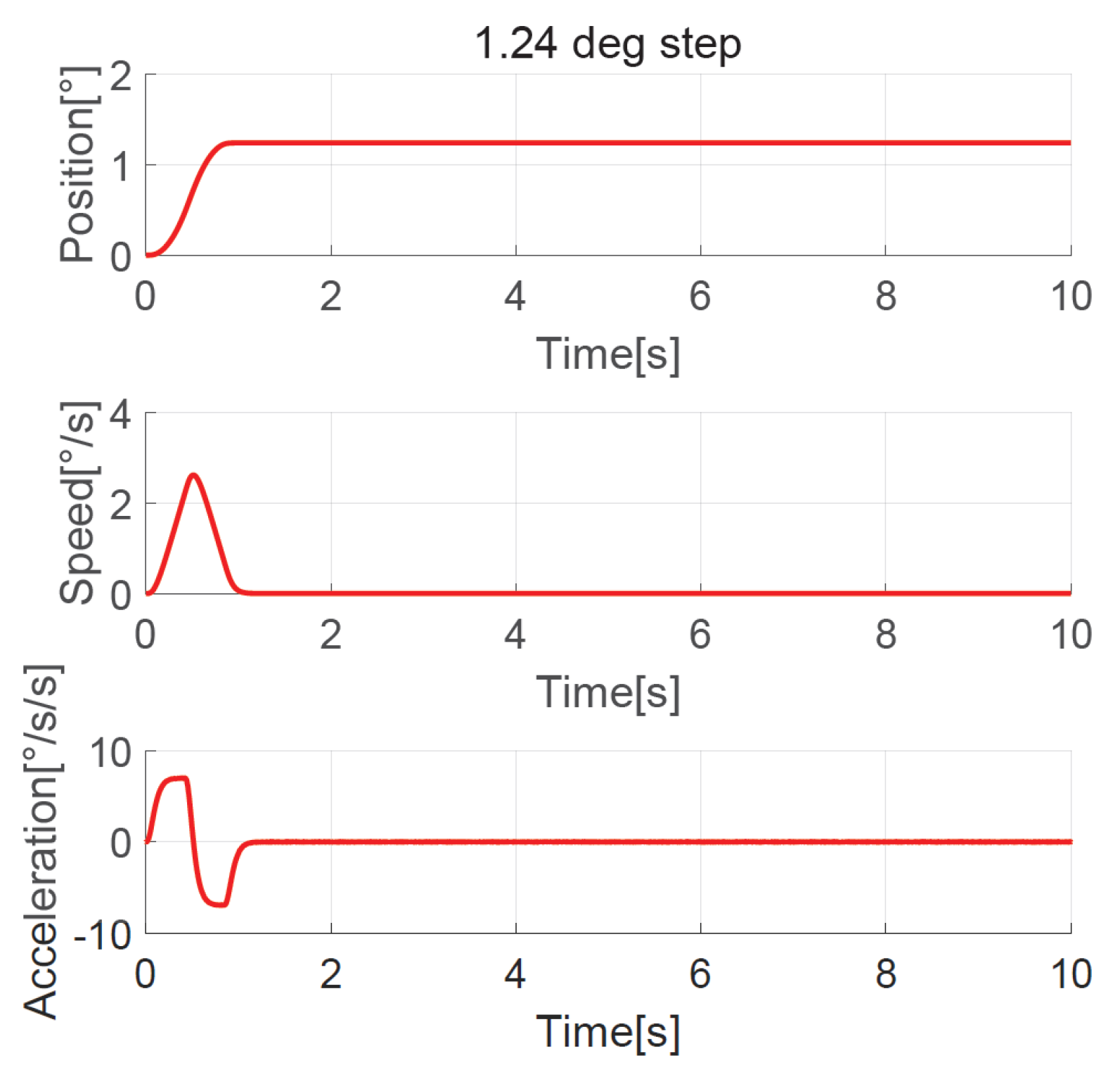
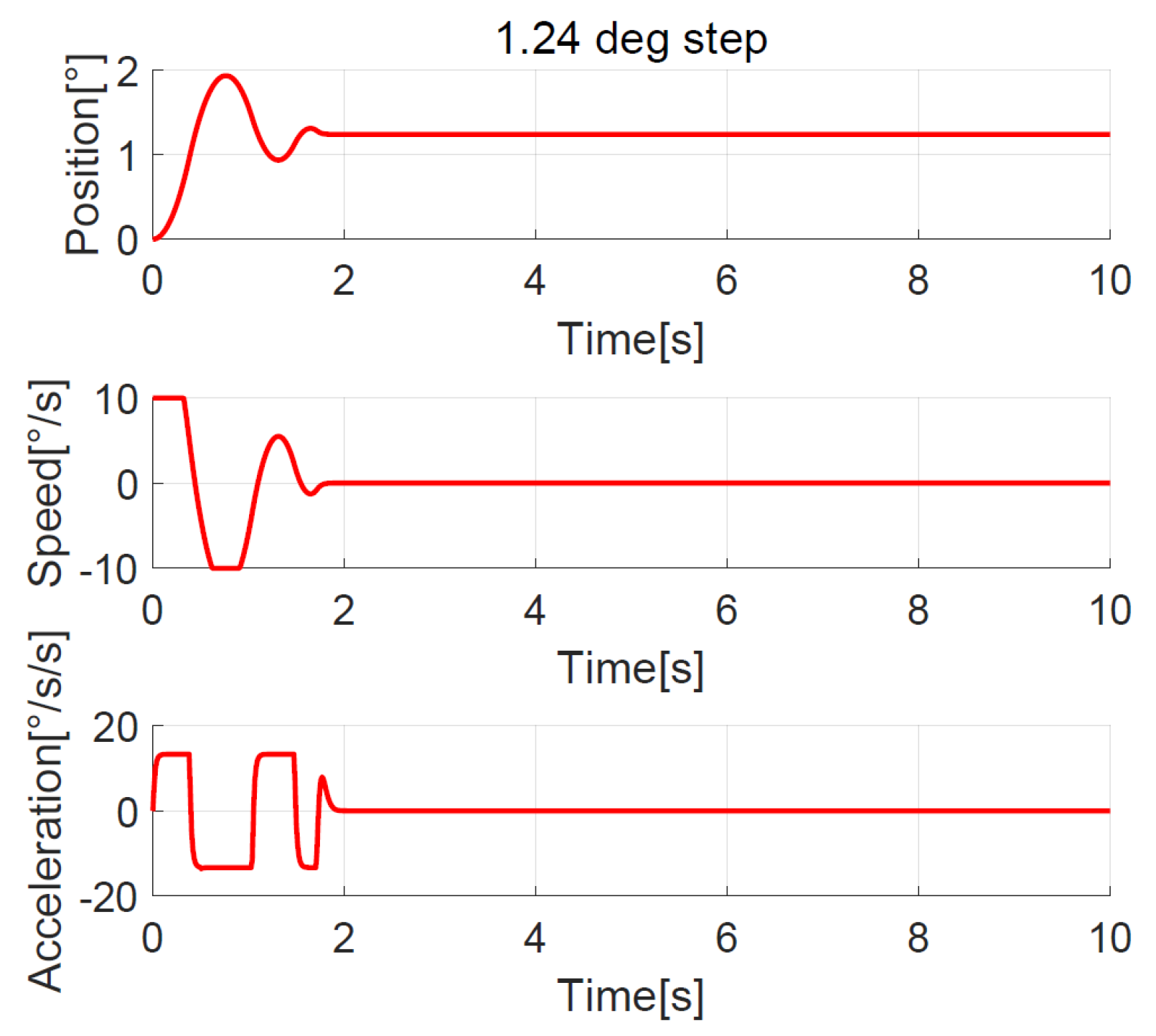
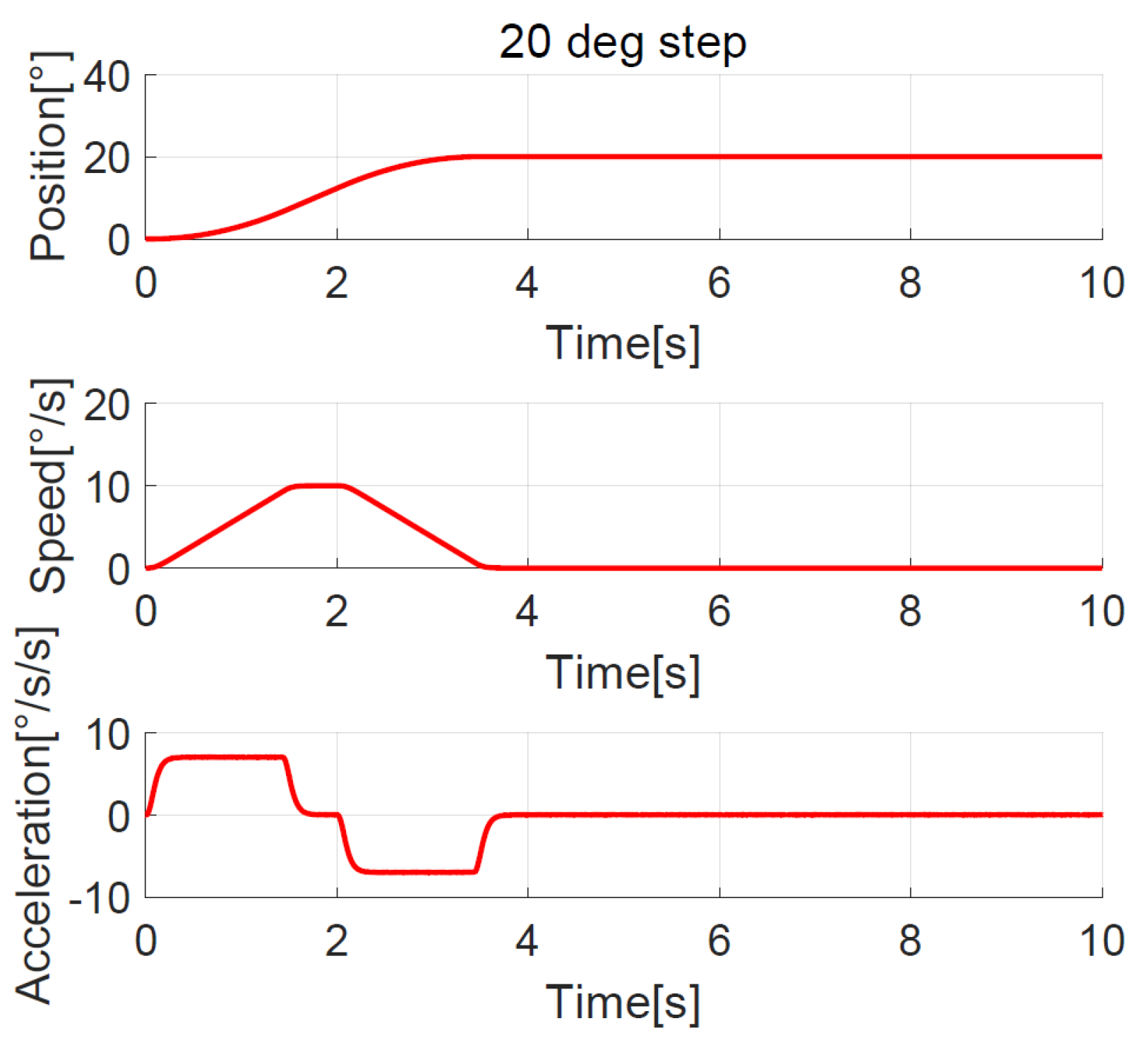
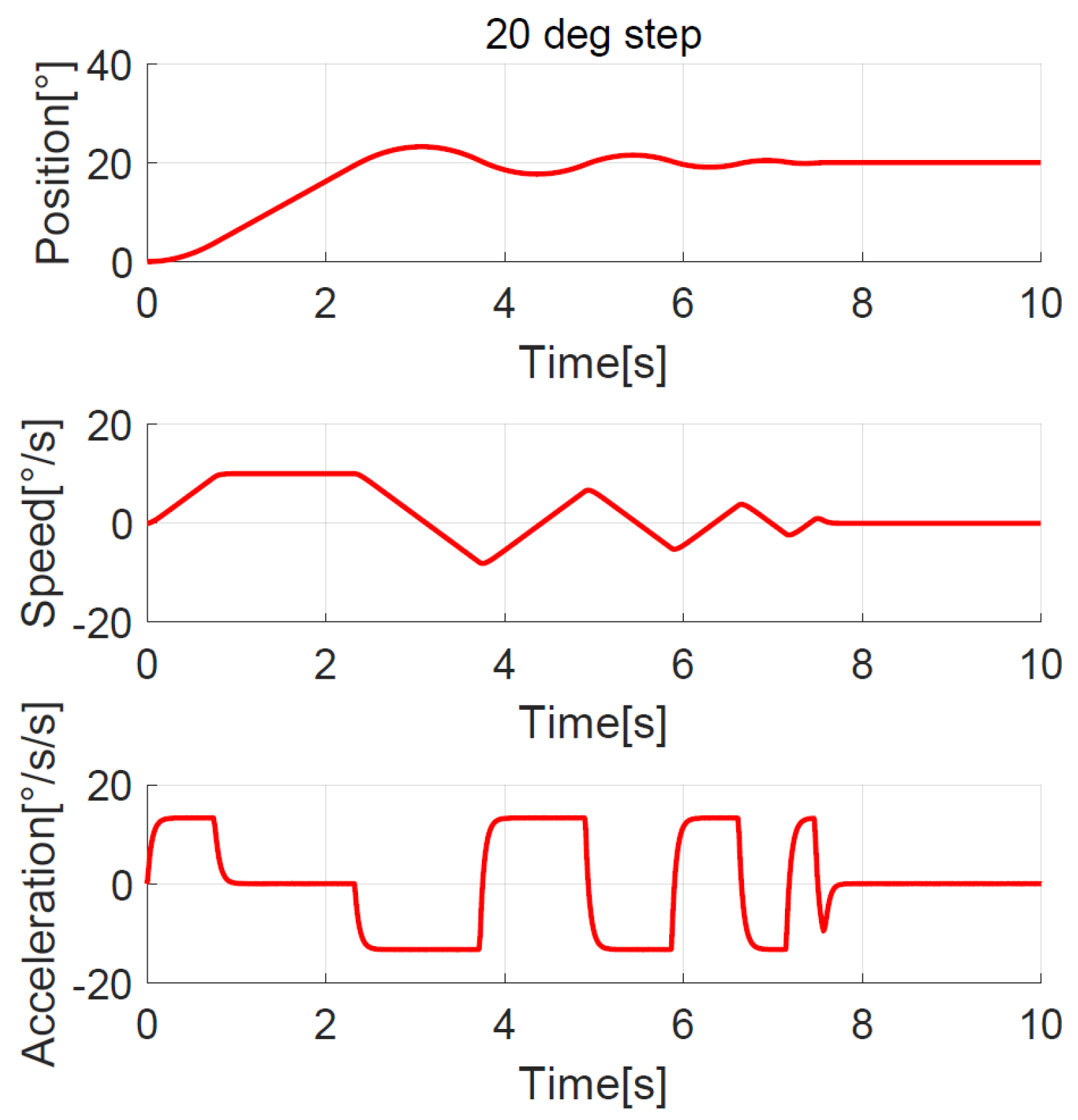
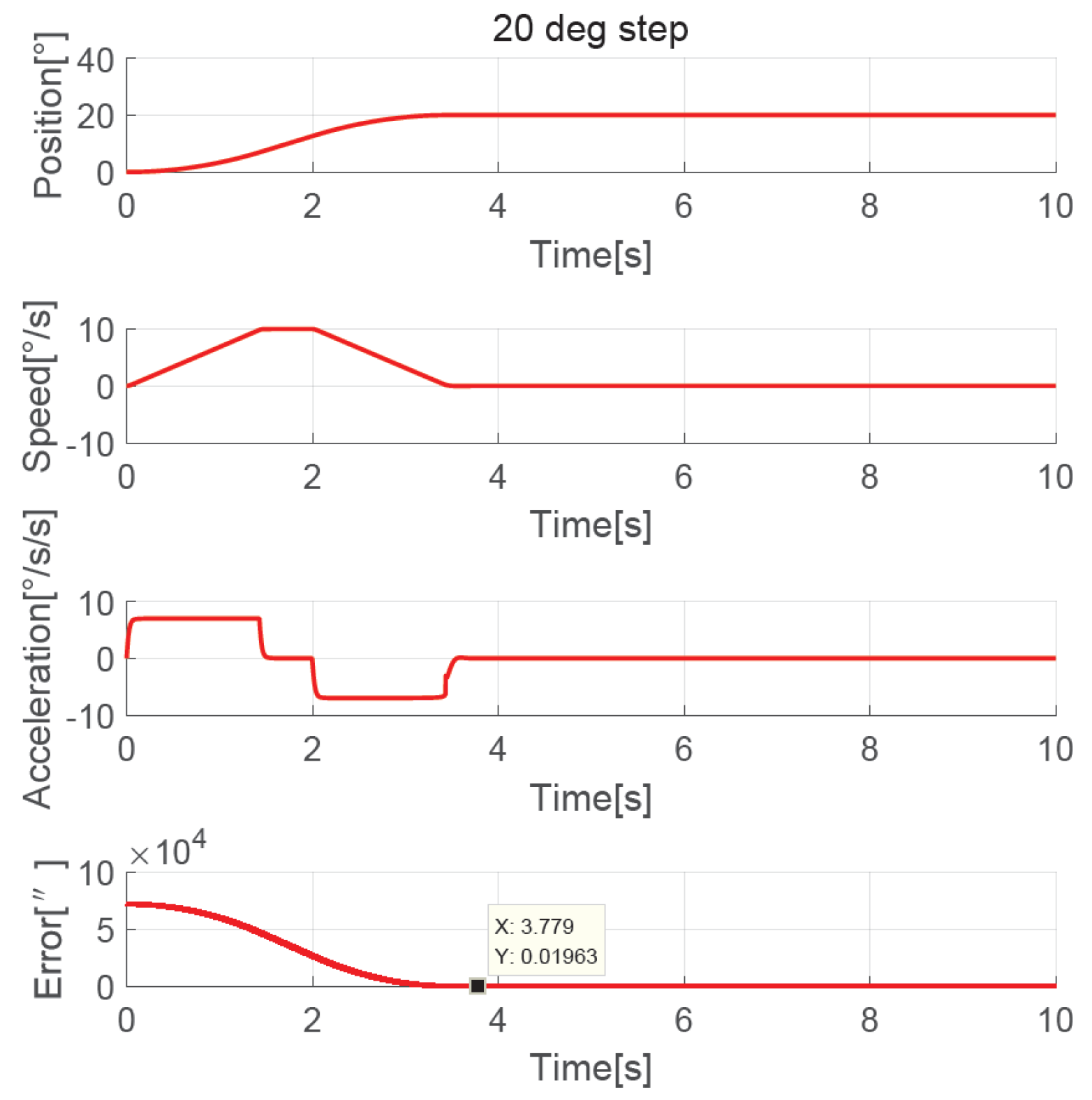
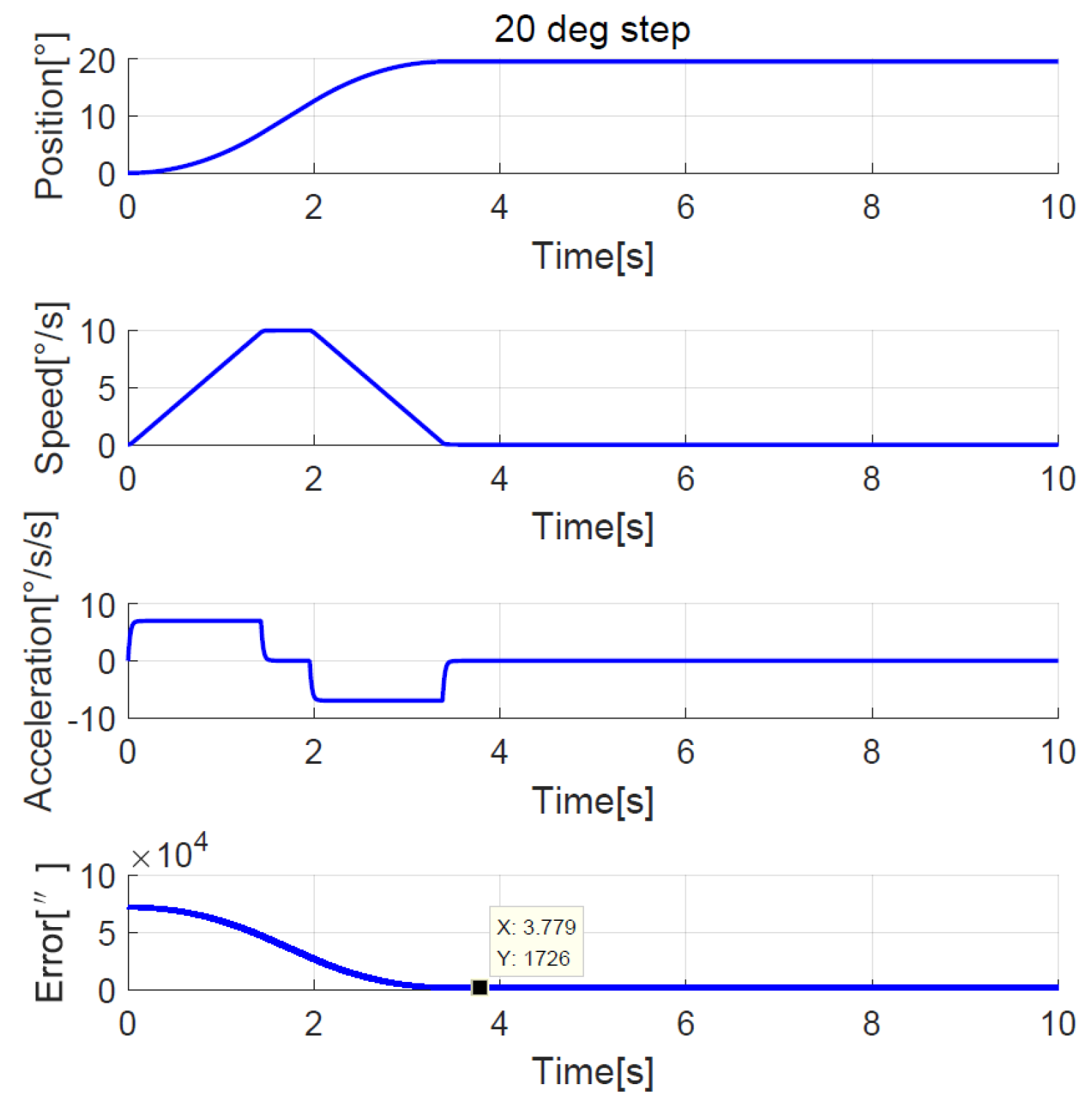
2.6. Design Transition Process Using the NTD
The position loop uses the NTD to generate the transition process, and the reference position and speed are planned according to the maximum acceleration and maximum speed to suppress resonance and reduce overshoot. Here, the NTD adopts Han’s discrete fastest control function fhan [
8]. The discrete fastest tracking function
is given by
The NTD is improved according to the maximum speed and maximum acceleration limit of the telescope, and the design is as follows:
where
v is the input signal to be followed and
r is the speed factor. For a larger value of
r, the
value reaches the set value
v faster. The turning frequency
of the NTD is also determined by
r. Generally,
, and
r is taken as the maximum acceleration of the telescope, that is,
.
can be used as the approximate derivative of
v.
h is the integration step, which is generally the sampling period.
is the filtering factor. Generally,
, and
m is a positive integer greater than 1, which can filter out the noise of the input signal. If a larger
m is selected, the filtering performance is better, but the phase lag is higher.
is the amplitude limiting function, and the position signal
is the signal to be followed, where
is the maximum allowable mechanical angular speed
of the system.
5. Conclusions
To address the issues facing a 2.5-m-wide field survey telescope suffering from limited control bandwidth and increasing disturbances, a novel cascade anti-disturbances structure (NCADS) with linear active disturbance rejection control (LADRC) and a nonlinear disturbance observer (NDOB) was proposed in this study. The NDOB feedforward compensated for dominant disturbances on the inner current loop, and the LESO of the ADRC rejected the residual disturbance on the outer speed loop, which lightened the burden of the ADRC. Compared with conventional methods such as PI, ADRC, and PI + NDOB, the proposed NCADS method has stronger ability to reject disturbances from friction, cogging torque, and wind load, thus achieving higher tracking precision. A parameter-tuning method based on bandwidth was presented, which makes it easy for engineering applications.
The improved NTD with the speed and acceleration limit of the telescope was proposed to plan the transition process, which does not need to tune other parameters and made the telescope operation faster and smoother.
The simulation and experimental results of the 2.5-m-wide field survey telescope showed that the proposed method has better performance in terms of disturbance rejection, tracking precision, and transition process compared to the conventional methods. There is no need to add an acceleration sensor or change the classical three-closed-loop control structure.
The NCADS method can effectively enhance robustness against disturbances under limited control bandwidth, and the improved NTD is feasible method to plan transition process for servo system that knows the drive capability. We believe that the proposed method has the potential to improve the performance of large telescopes’ servo systems.
The simulations verified the effectiveness of the proposed method for suppressing wind disturbance, but it is necessary to conduct an outfield wind disturbance experiment next. In order to further improve the control efficiency, nonlinear active disturbance rejection control will be studied in the future.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}