
Precise and Efficient Pointing Control of a 2.5-m-Wide Field Survey Telescope Using ADRC and Nonlinear Disturbance Observer

Abstract
:1. Introduction
- (i)
- As the telescope diameter increases, the mechanical resonance frequency decreases, and the control bandwidth becomes narrower. In addition, disturbances caused by cogging torque, nonlinear friction, and random increases in wind load make it difficult for classical PI controls to meet the requirements of high performance, and the final image quality will be bad if the controller does not reject the disturbances adequately.
- (ii)
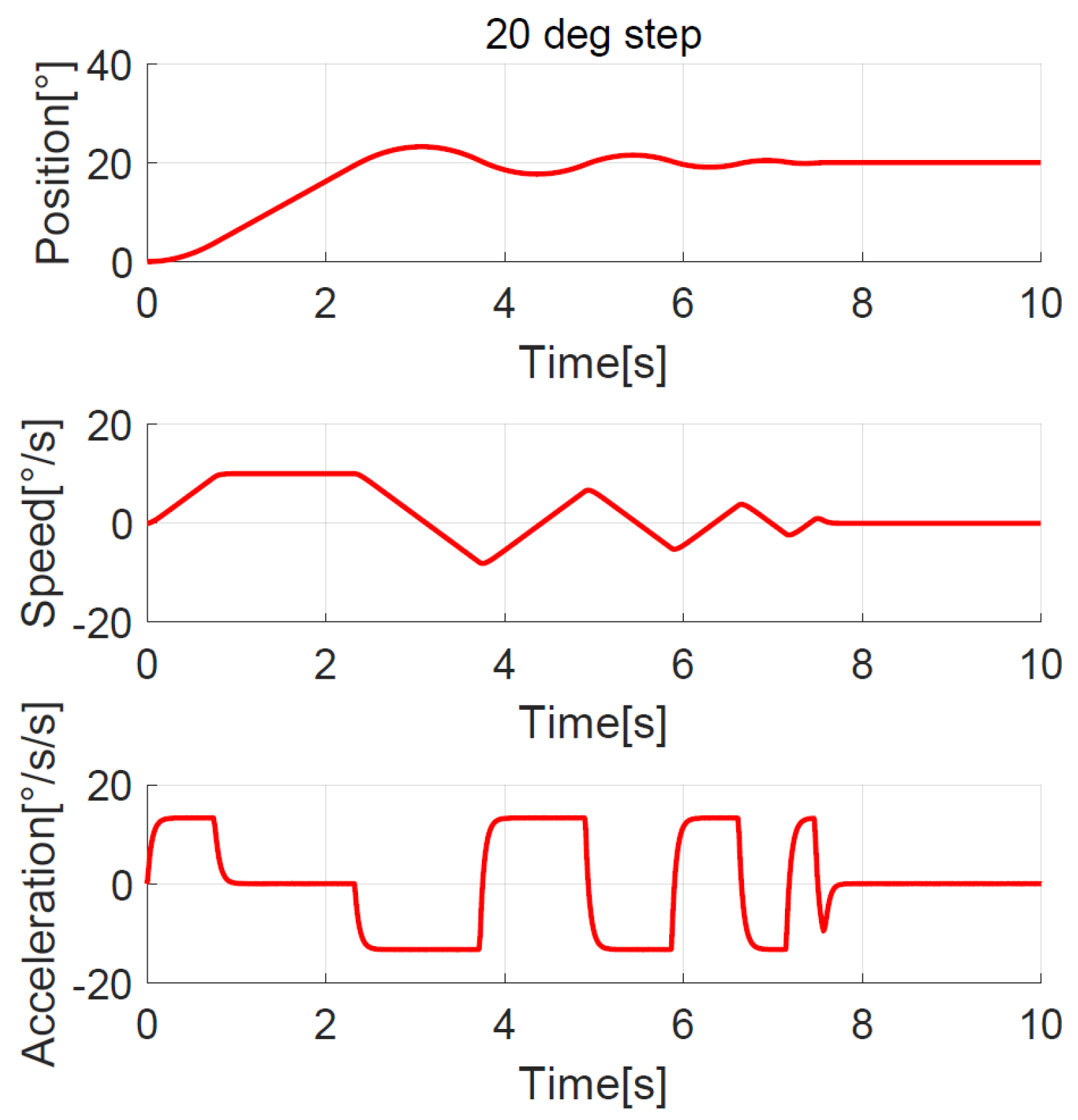
- Wide-field survey telescopes usually work in a searching and tracking mode; that is, the telescope first points to the target area, takes a long exposure picture, then subsequently points to the next target area, takes another long exposure picture again, and so on. Therefore, fast and smooth pointing without overshooting the target area is crucial to improve the efficiency throughout the whole night. So, the transition process must be planned according to the acceleration capacity.
- (iii)
- Many advanced and complex control algorithms have been developed; however, because their design or parameter-tuning methods are too complicated, they are rarely used as widely as PID in engineering practice. Because of its simple design and easily tuned controller, it is best to not change the classical three-closed-loop control structure, as it is more favorable to engineers.
- (1)
- The proposed NCADS with an LADRC on the speed loop and an NDOB on the current loop enhances the anti-disturbance performance under limited bandwidth.
- (2)
- The improved NTD with the upper bounds on speed and acceleration achieves a fast and smooth transition process for the position loop.
- (3)
- The proposed method has few parameters and is simple to tune based on control bandwidth, which makes it easy for engineering applications.
2. Servo Control System Design of a Large Ground-Based Telescope
2.1. Mathematical Model of Vector Control for PMSM
2.2. Design of PI Controller of Current Loop
2.3. Design of the NDOB for Feedforward Compensation on the Current Loop
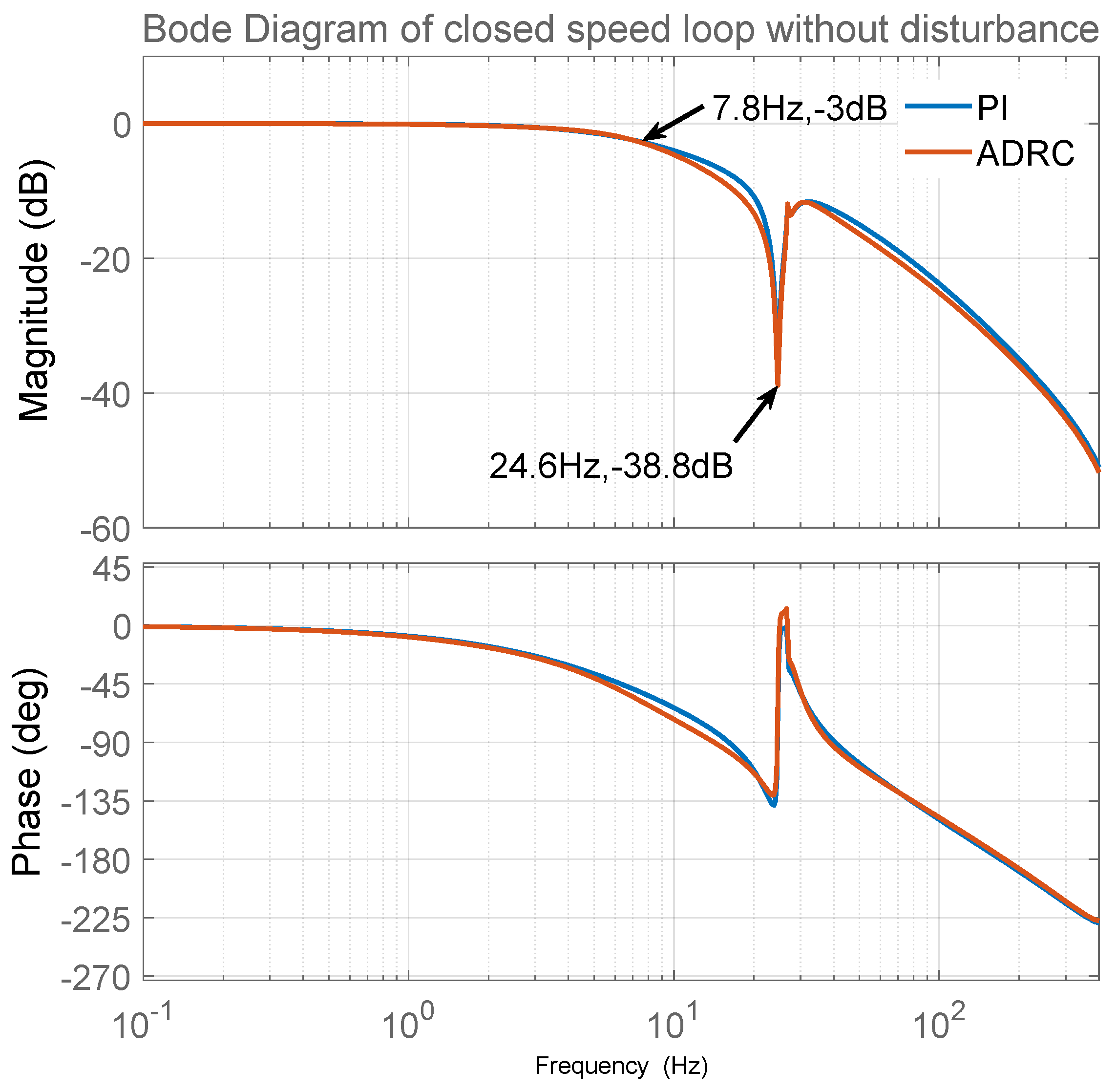
2.4. Design of the LADRC for the Speed Loop
2.5. Design of the PI Controller for the Position Loop
2.6. Design Transition Process Using the NTD
3. Simulation and Analysis
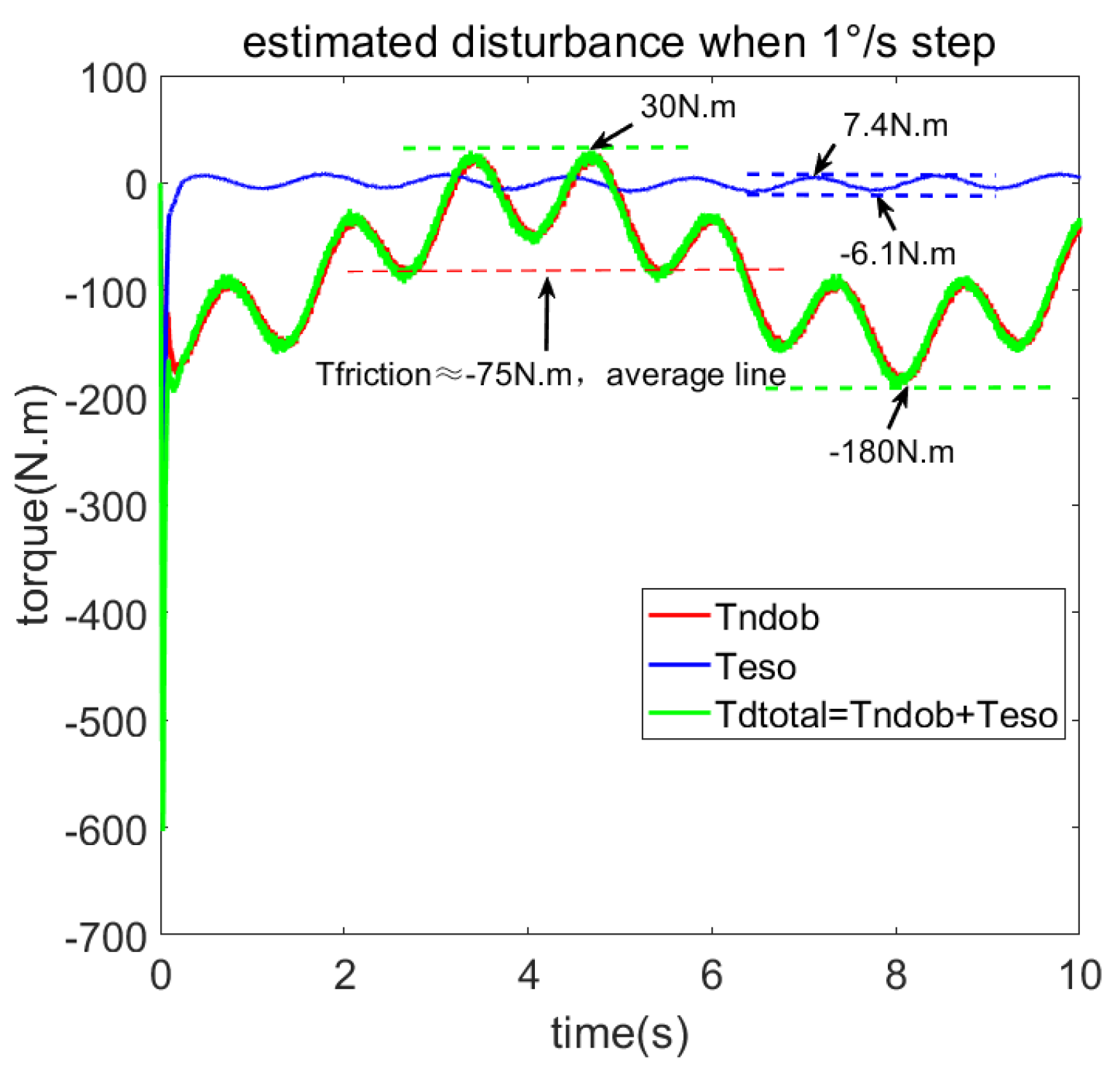
3.1. Main Disturbance of the Servo Systems of Large Telescopes
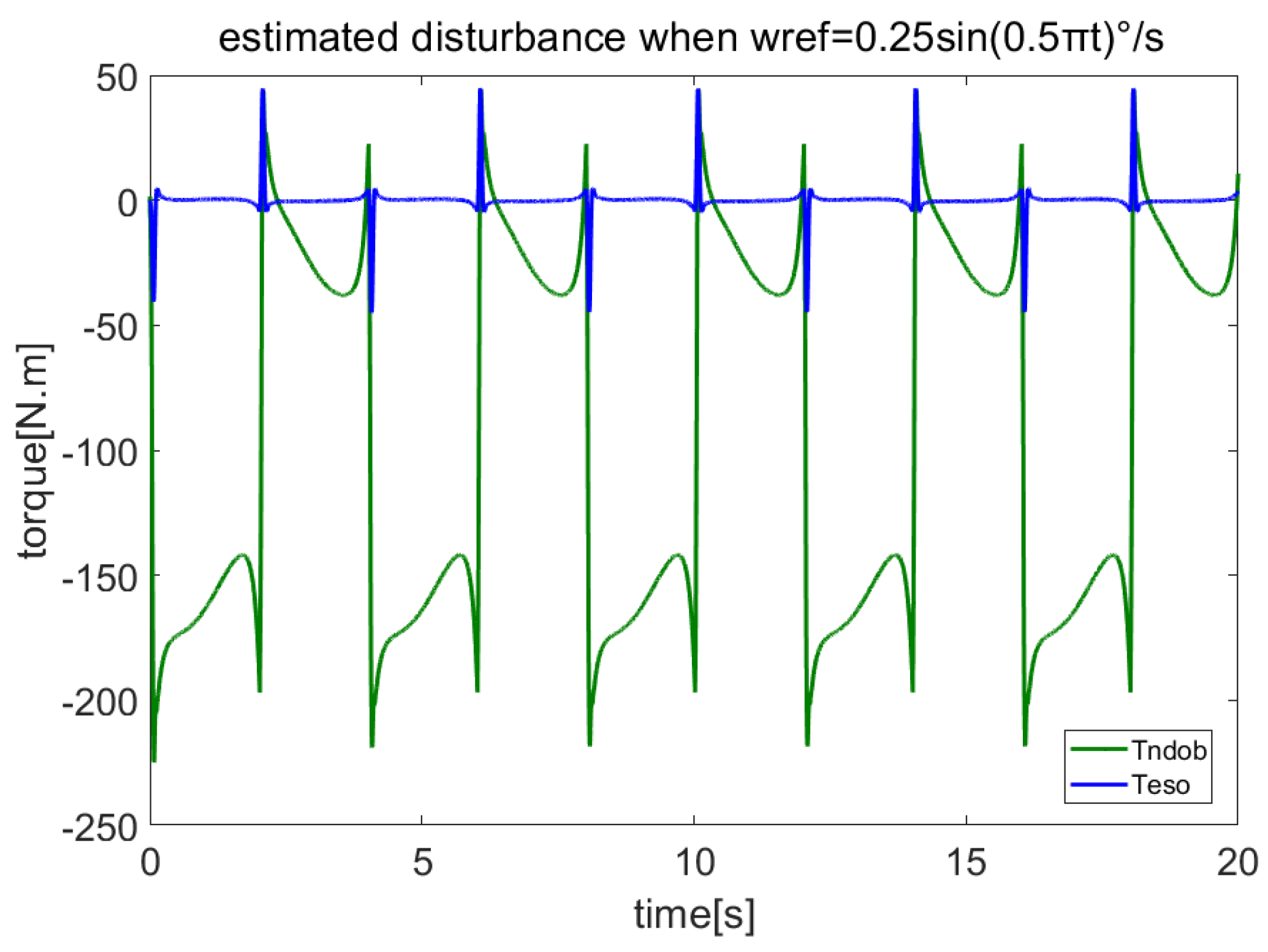
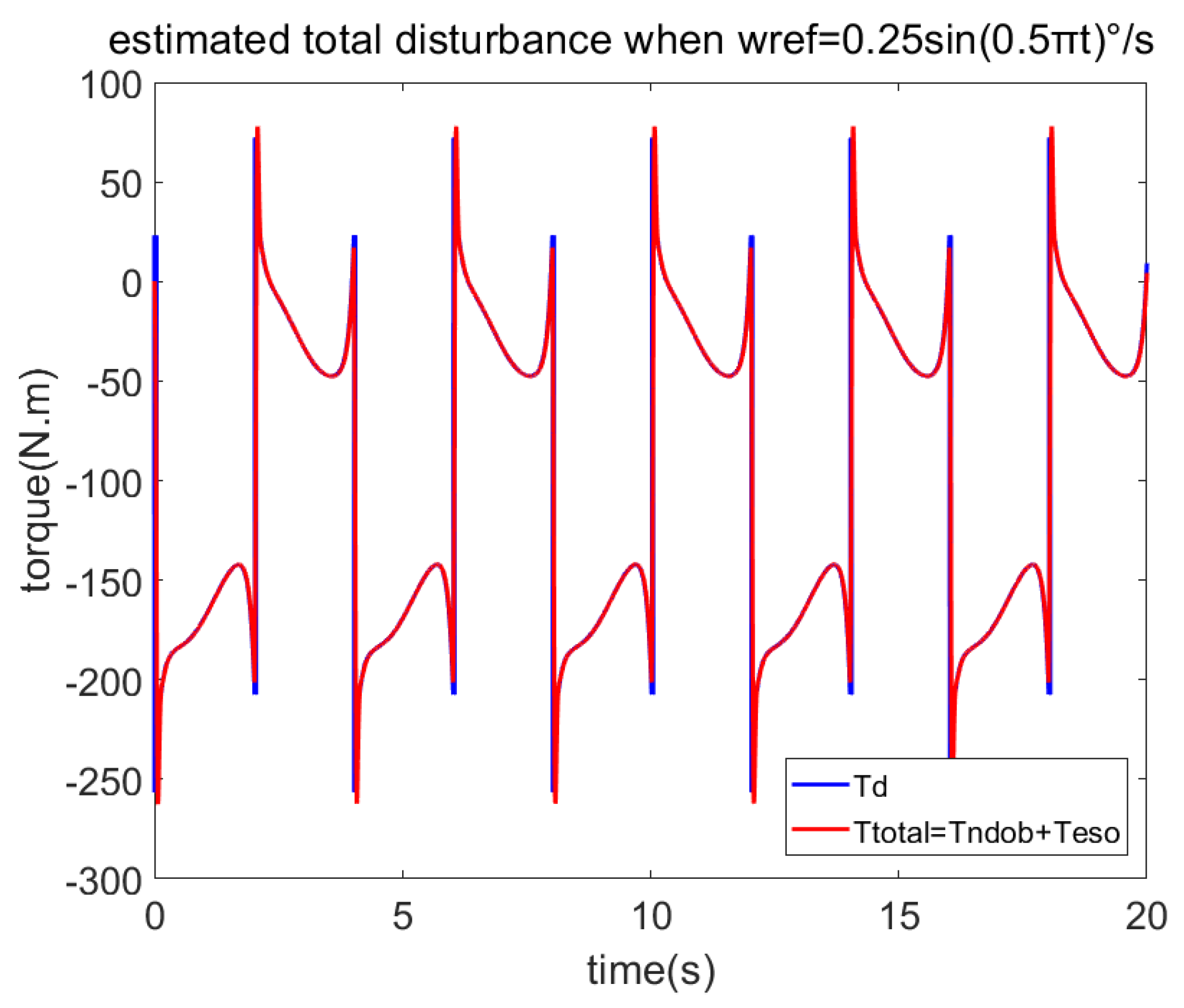
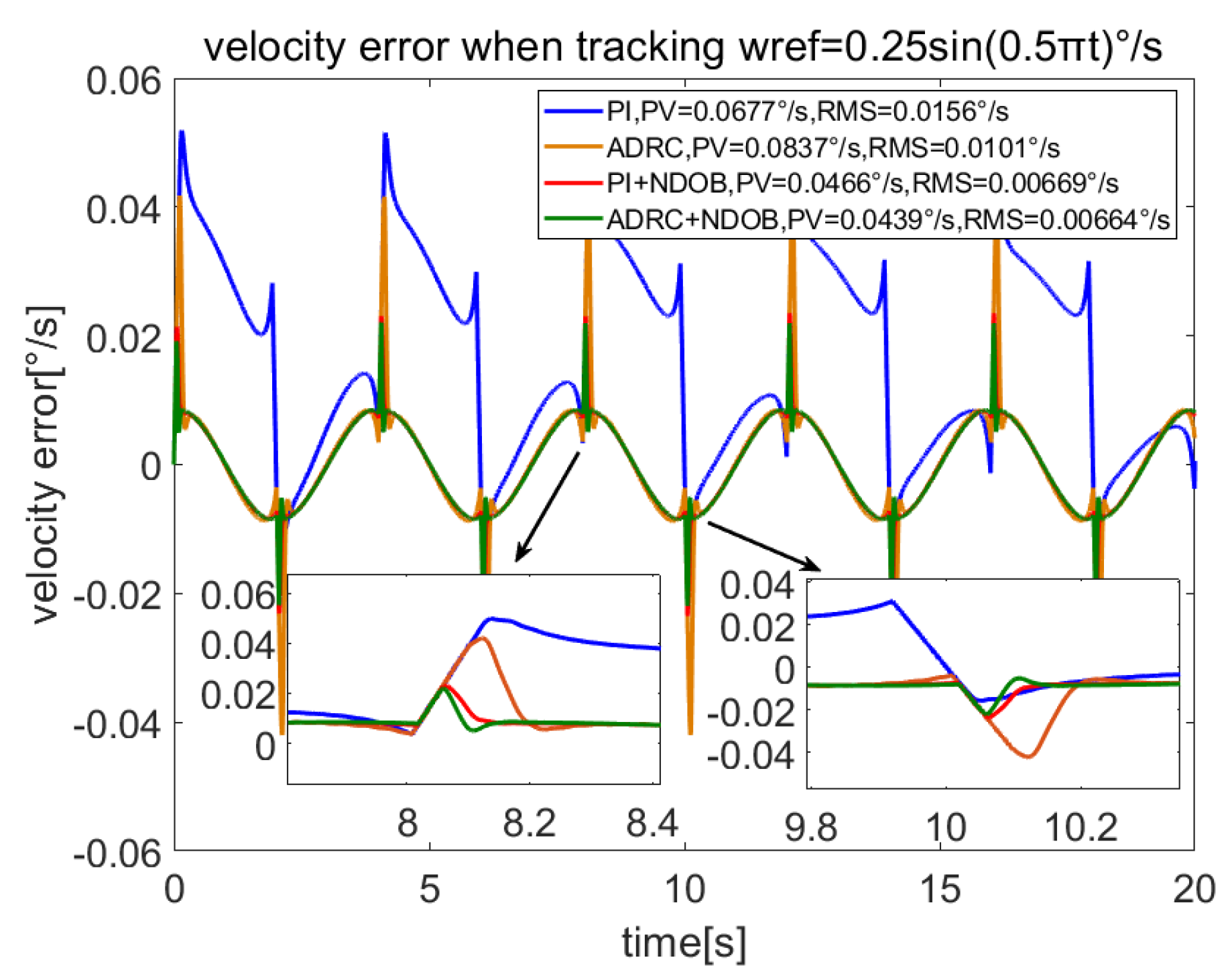
3.2. Simulation of Disturbance Estimation and Rejection Performance
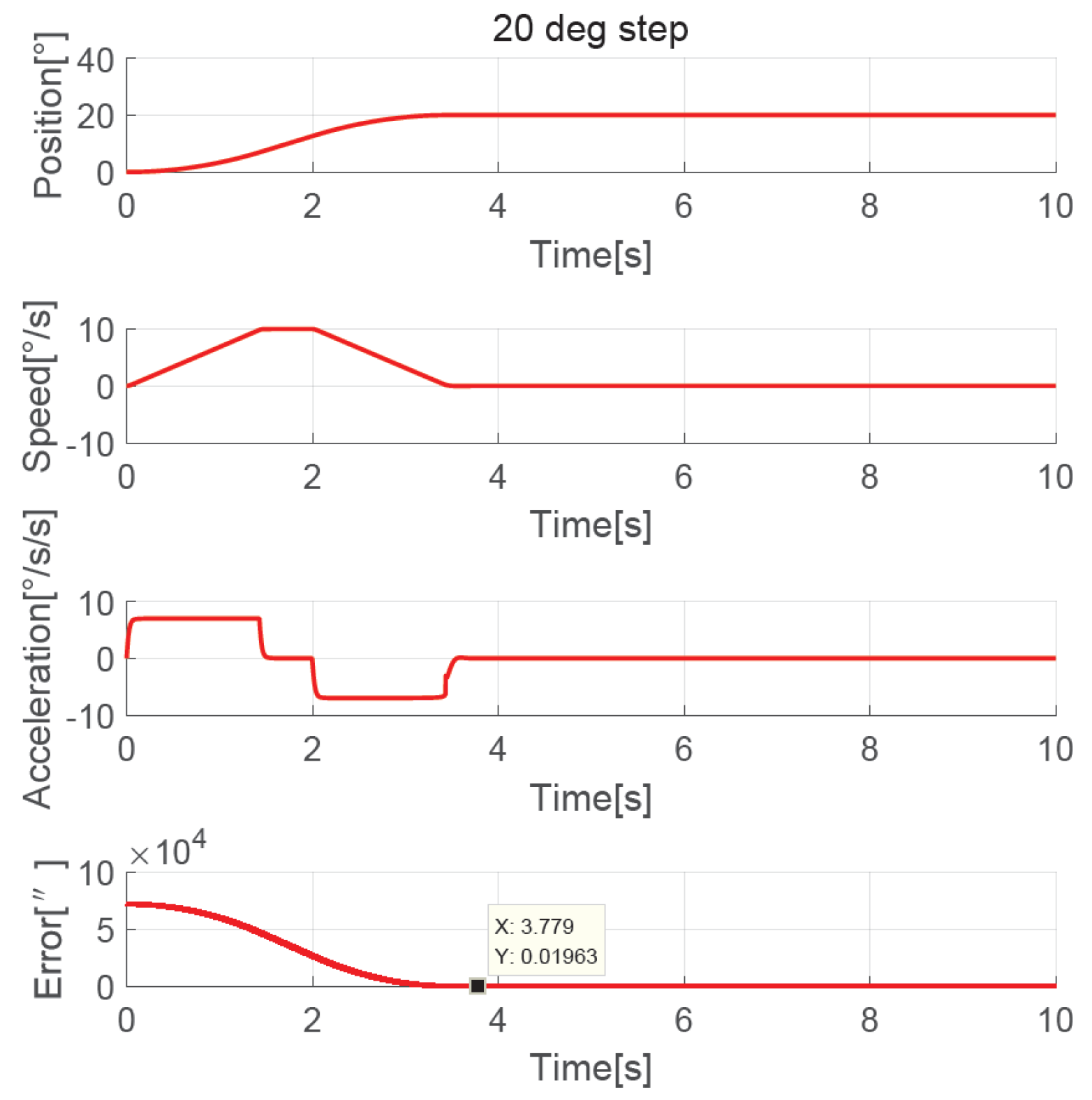
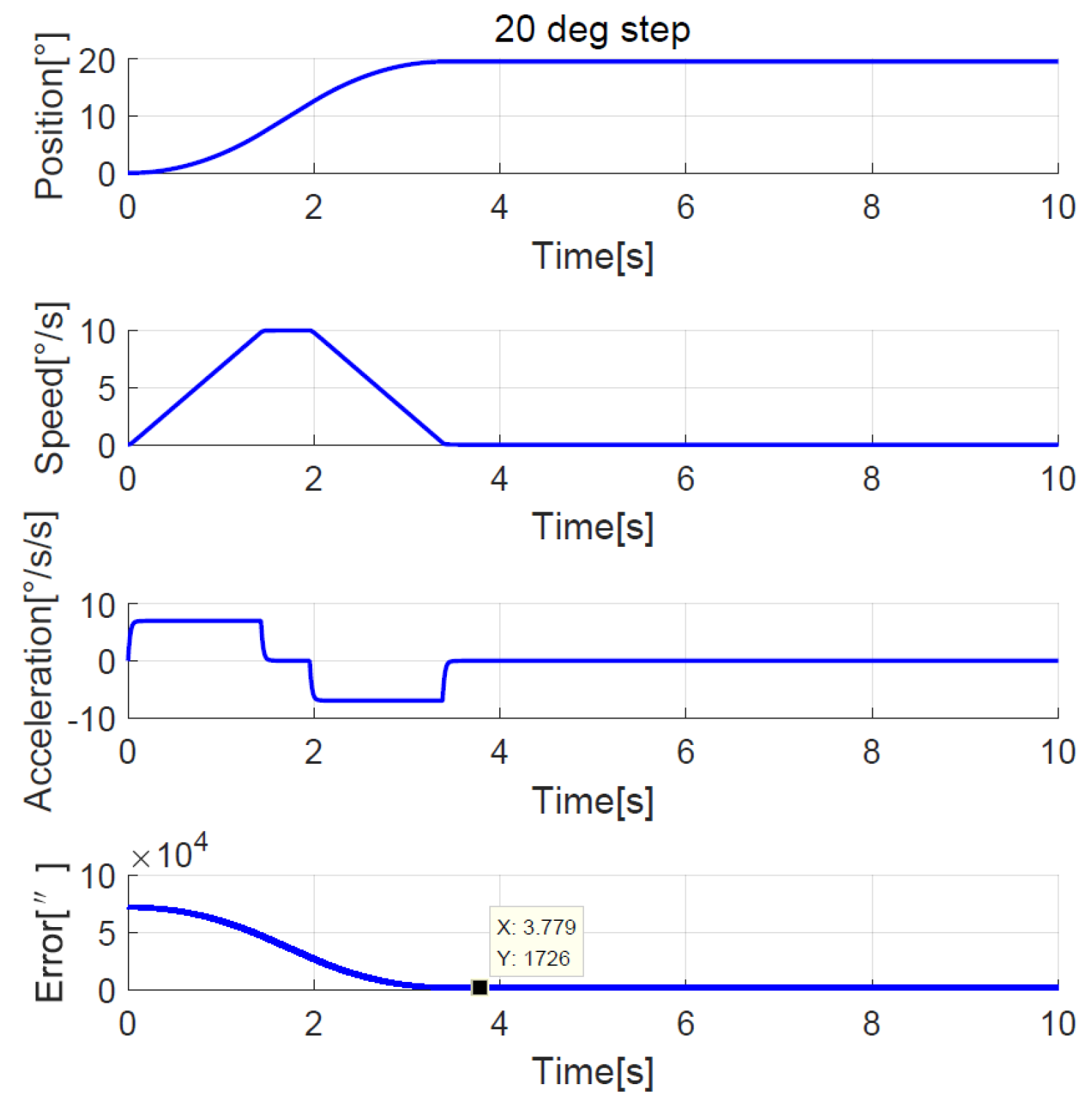
3.3. Simulation of Transition Process Planed by the Improved NTD
4. Experimental Results and Discussions
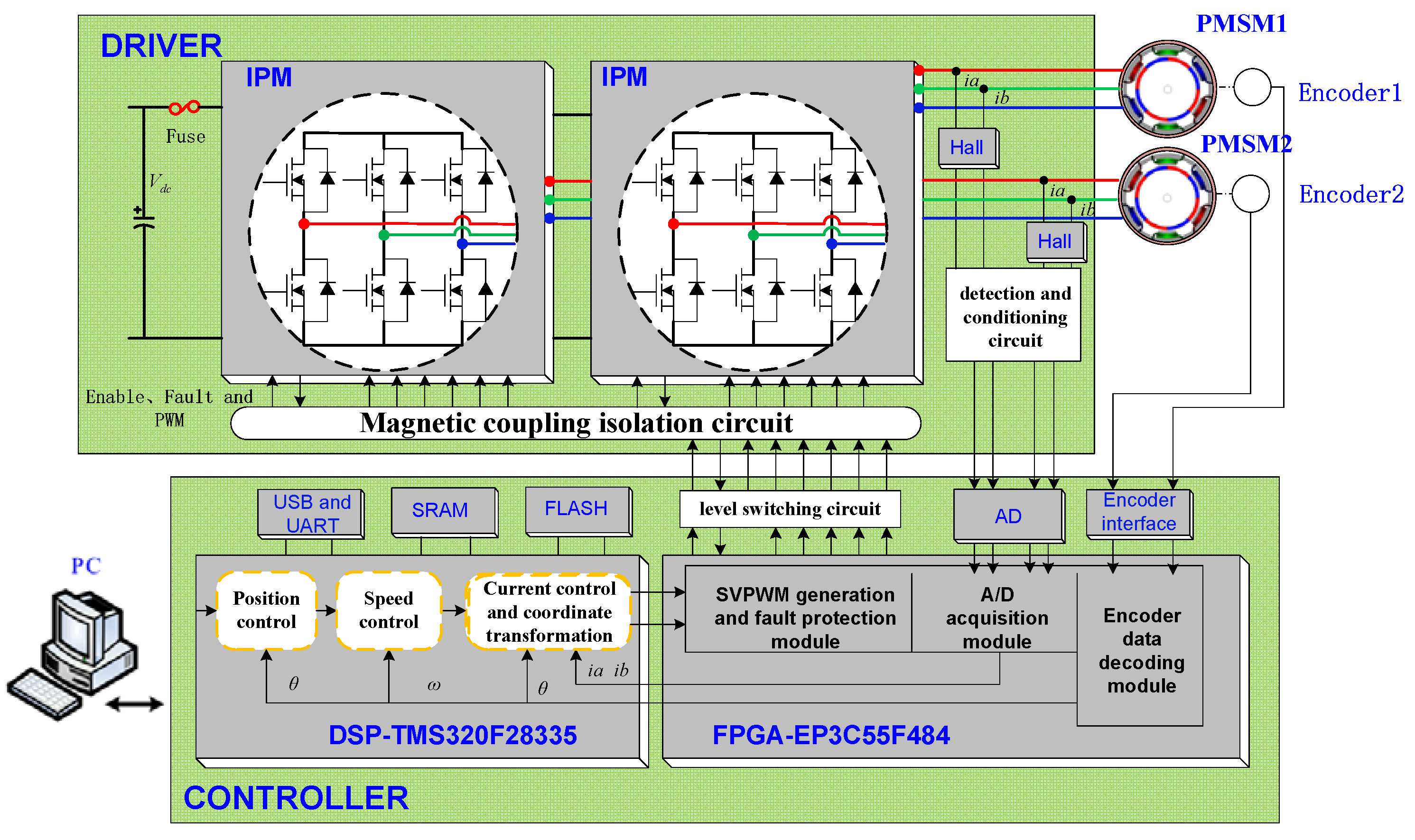
4.1. Experiment Setup
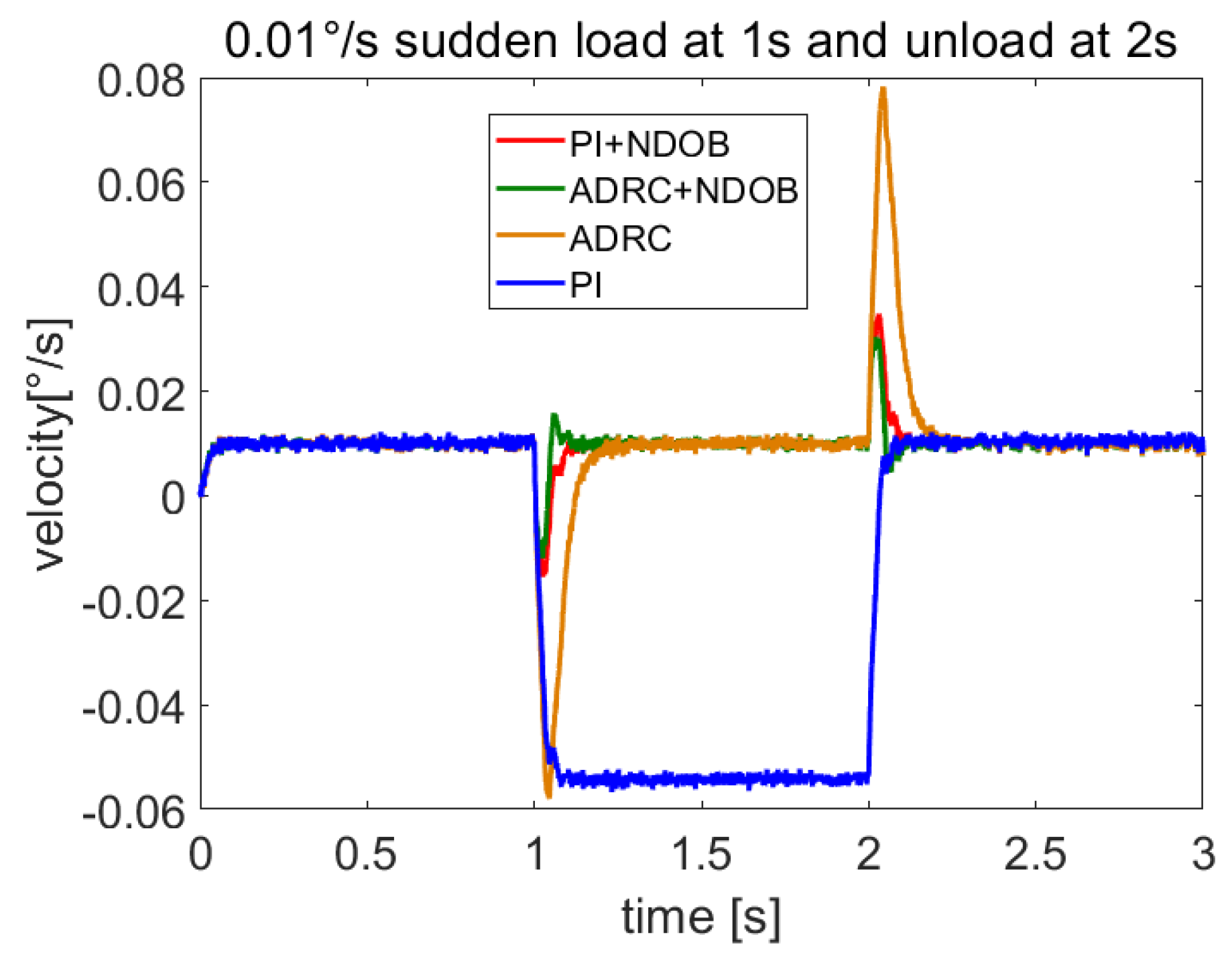
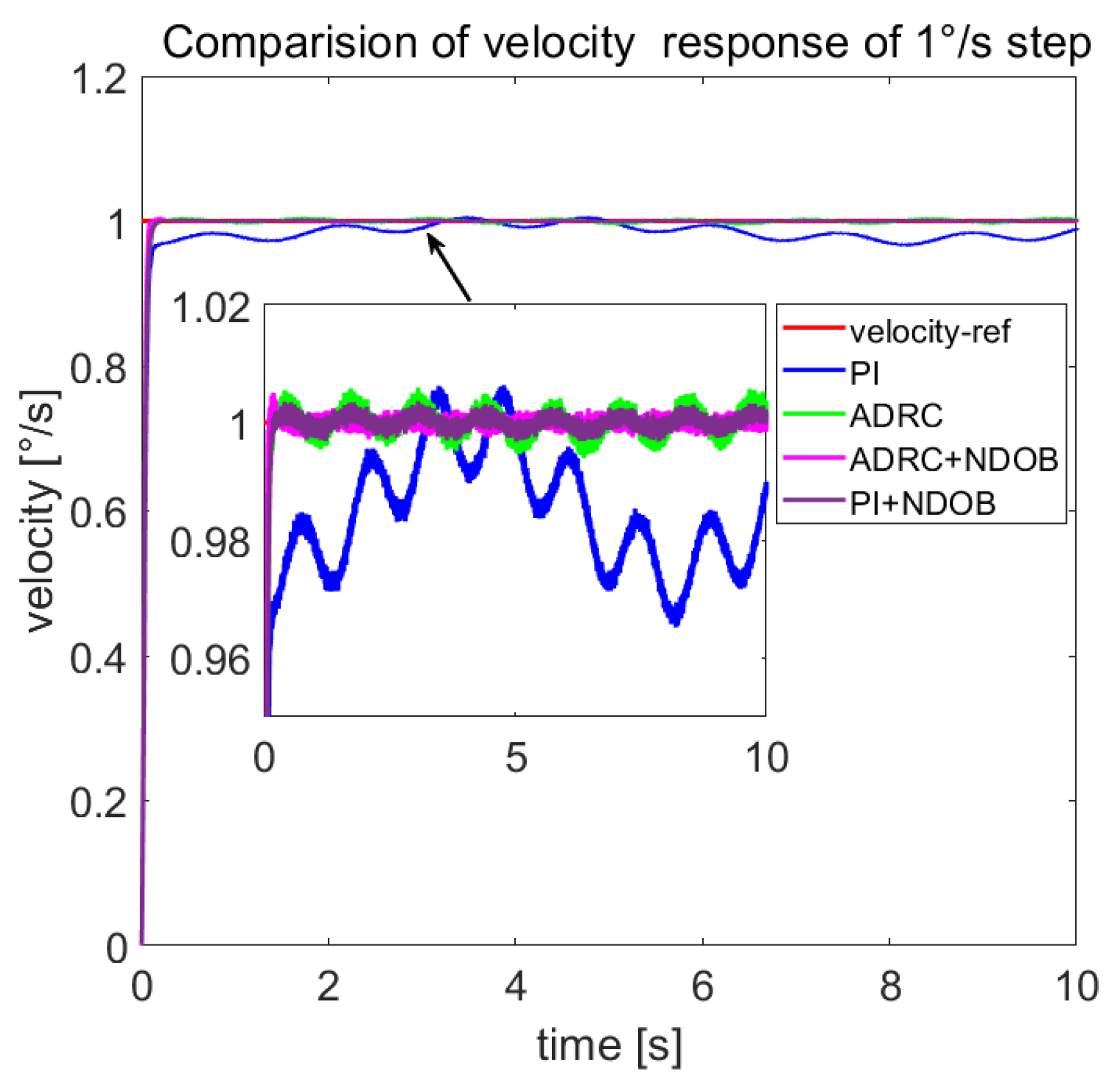
4.2. Anti-Disturbance Performance
4.3. Tracking Performance
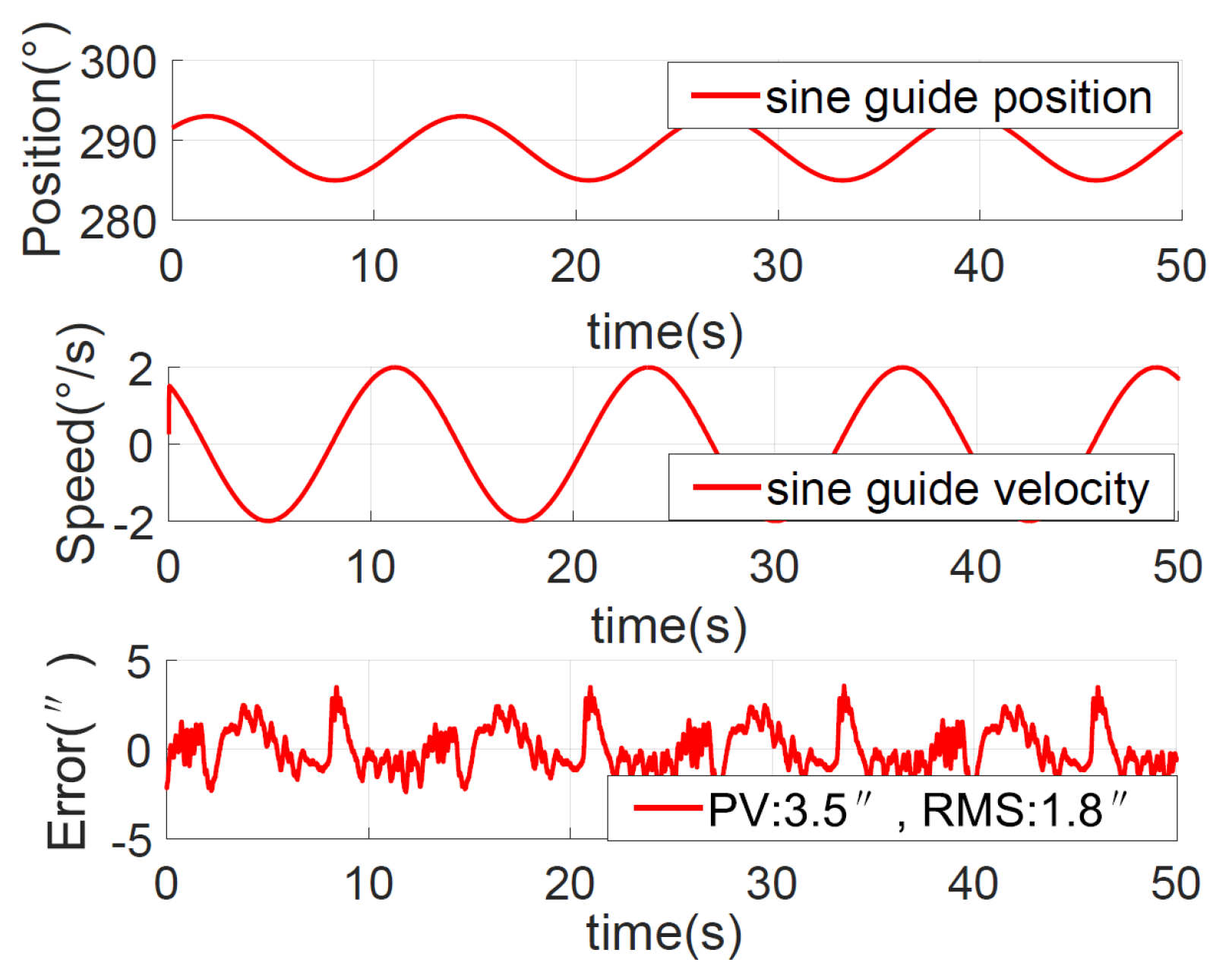
4.3.1. Position Response with Sine Guide to Verify Fast Tracking
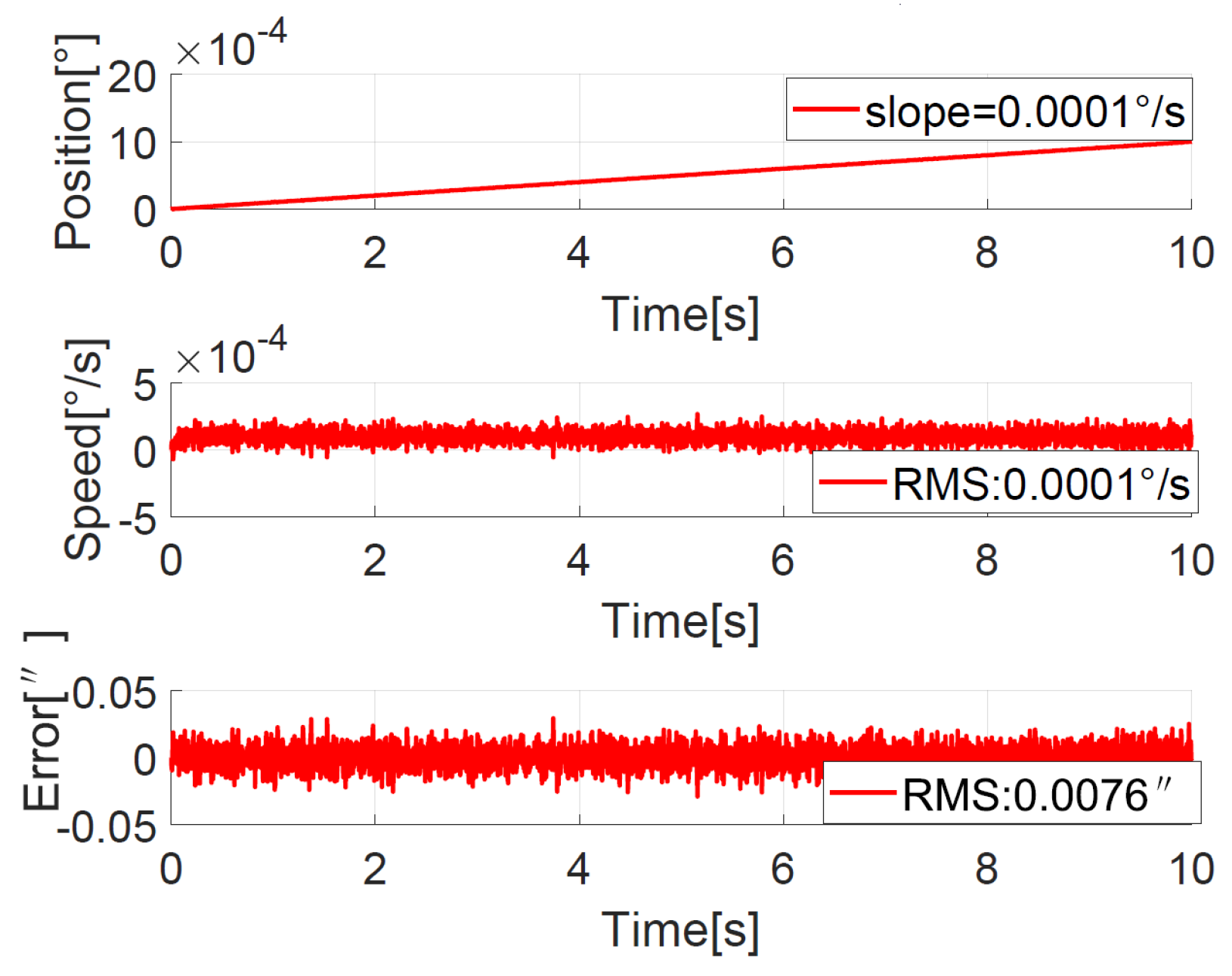
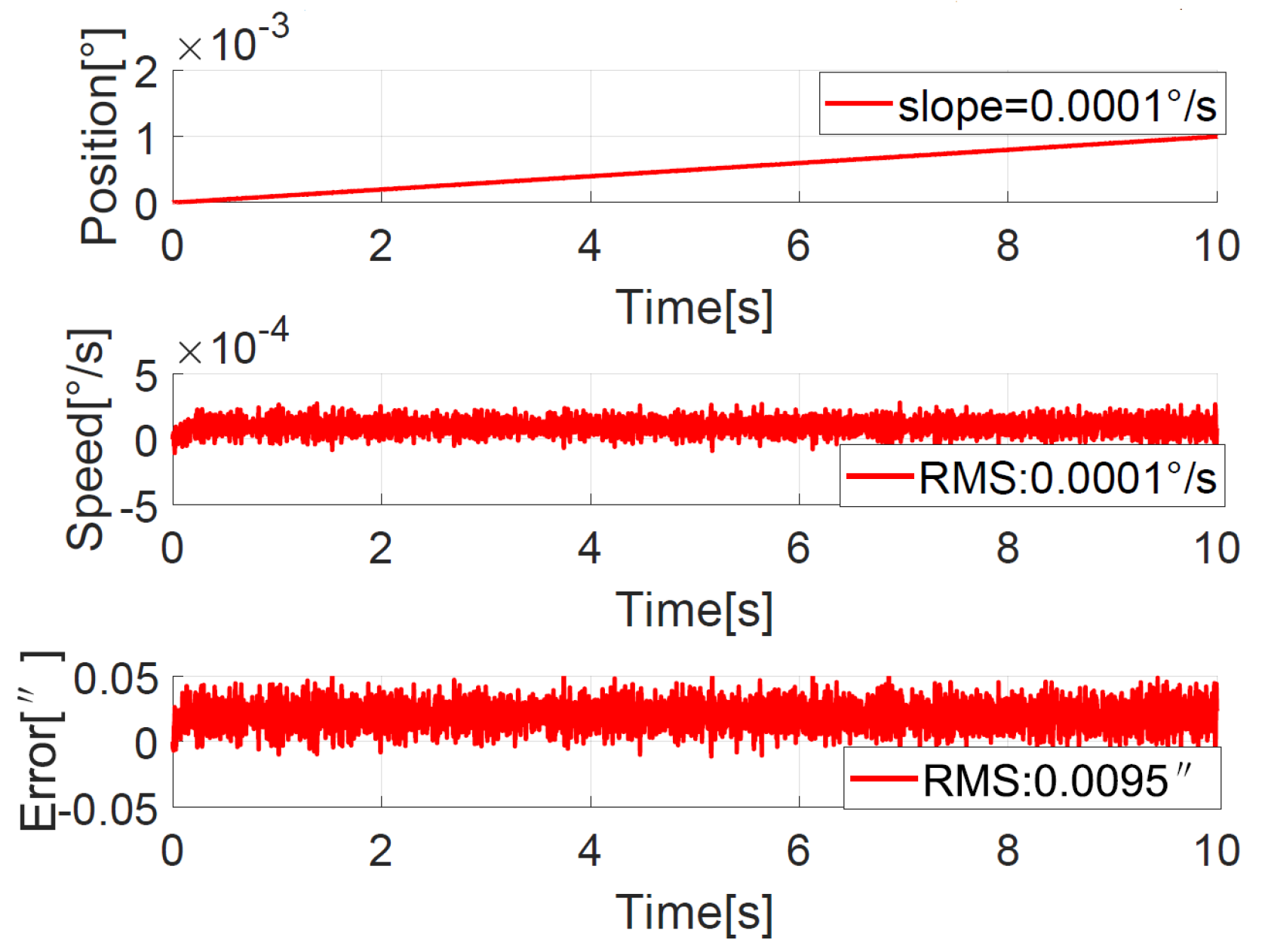
4.3.2. Position Response with Slope Guide to Verify Ultra-Low-Speed Tracking
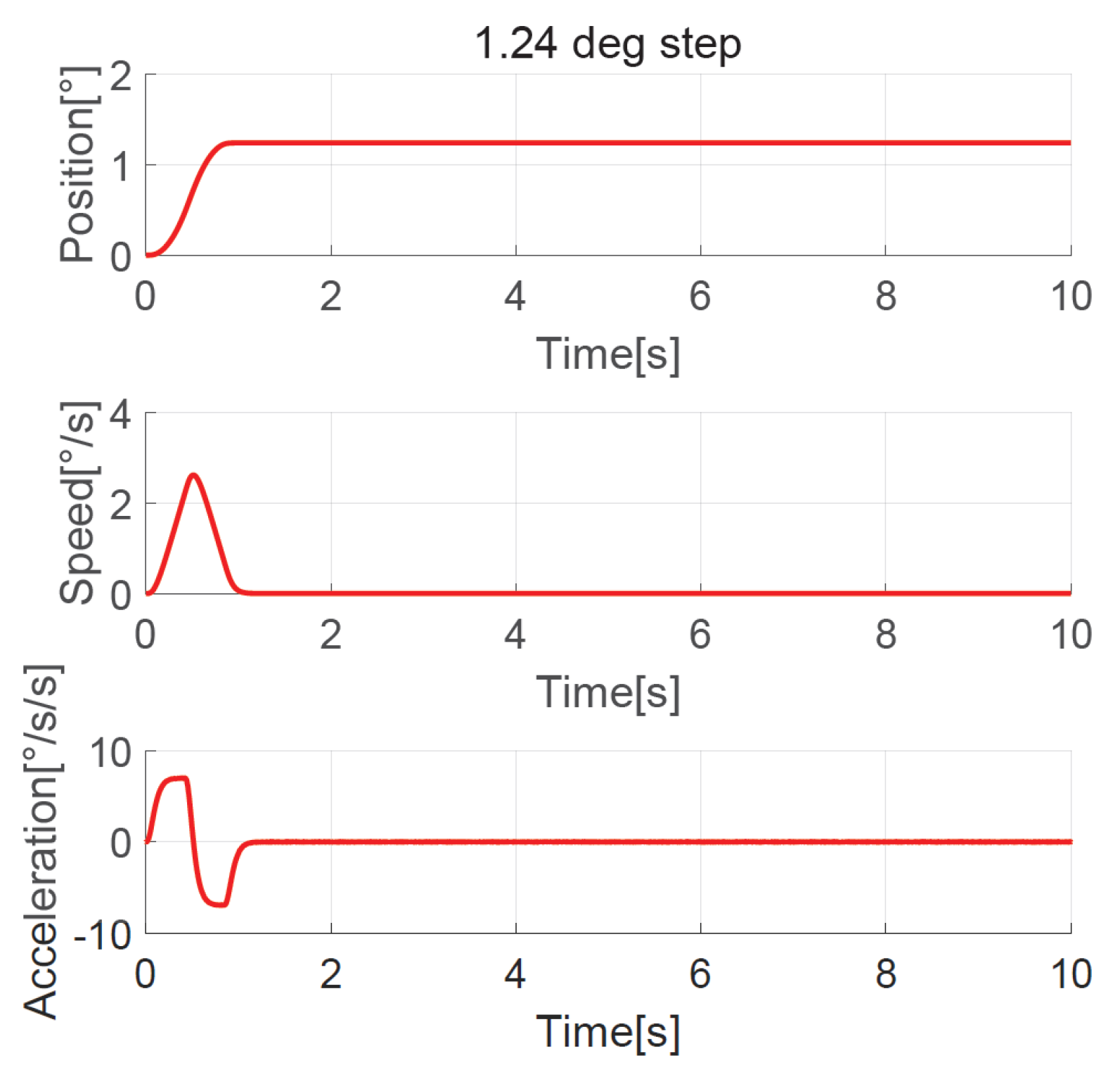
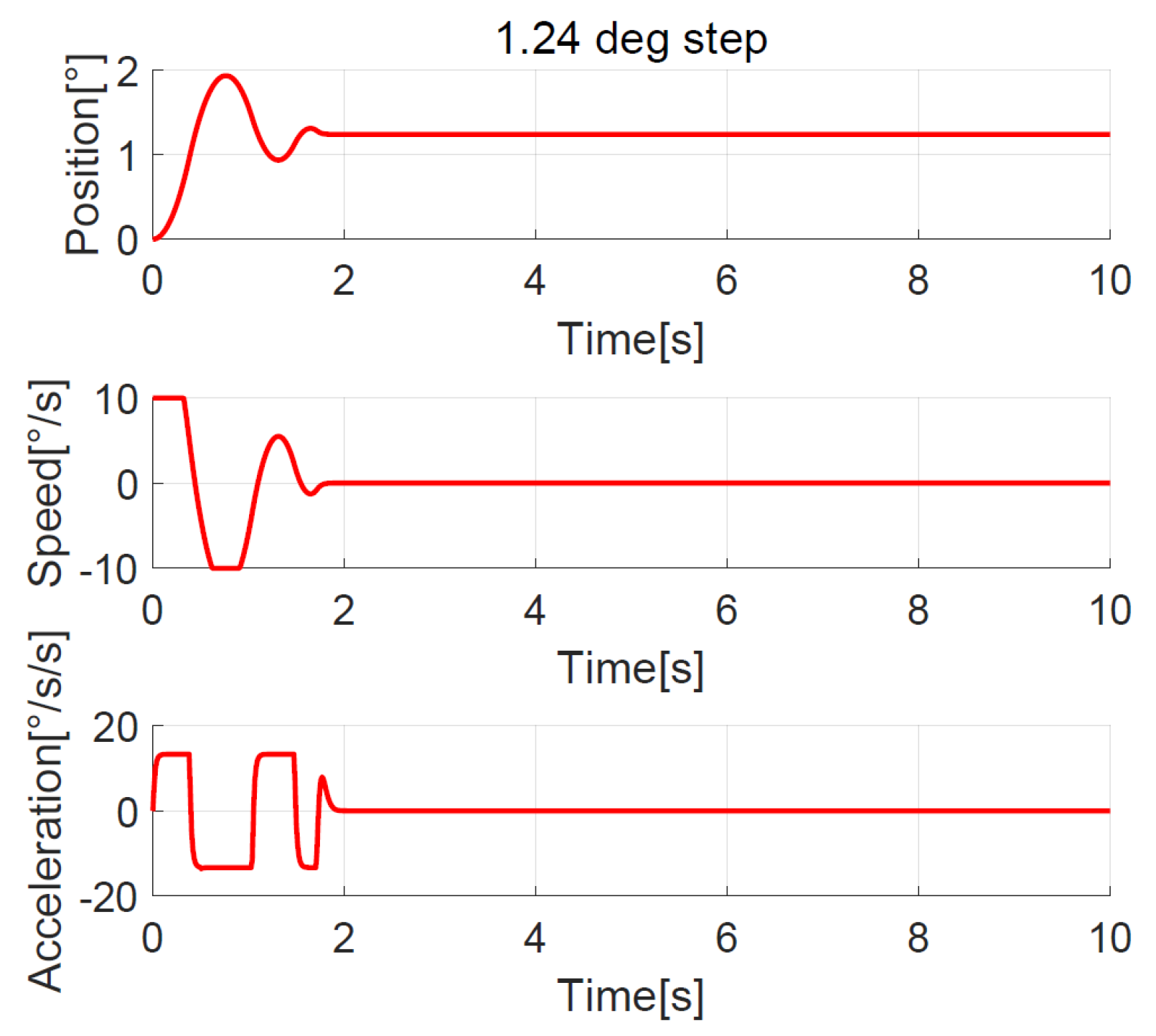
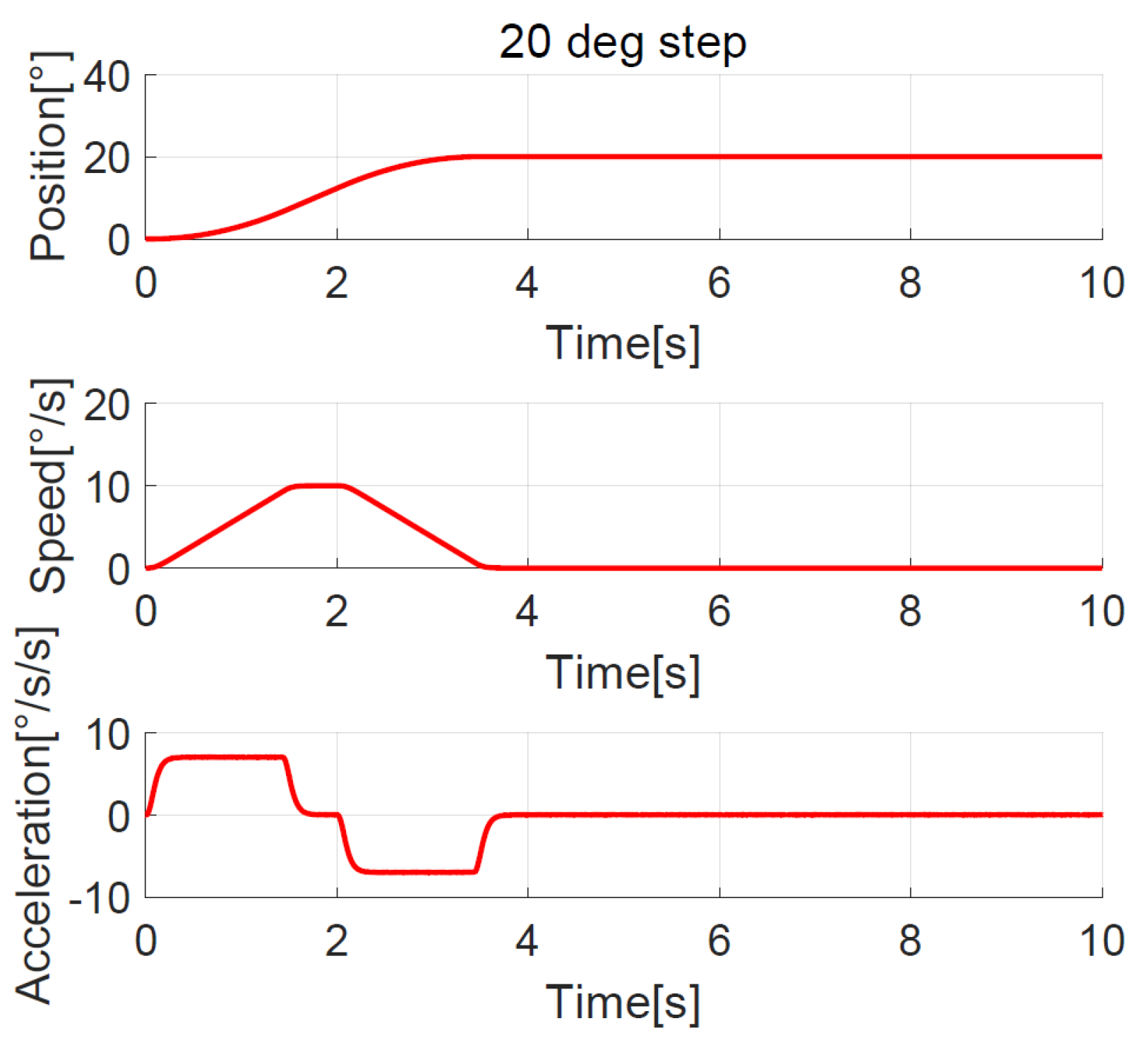
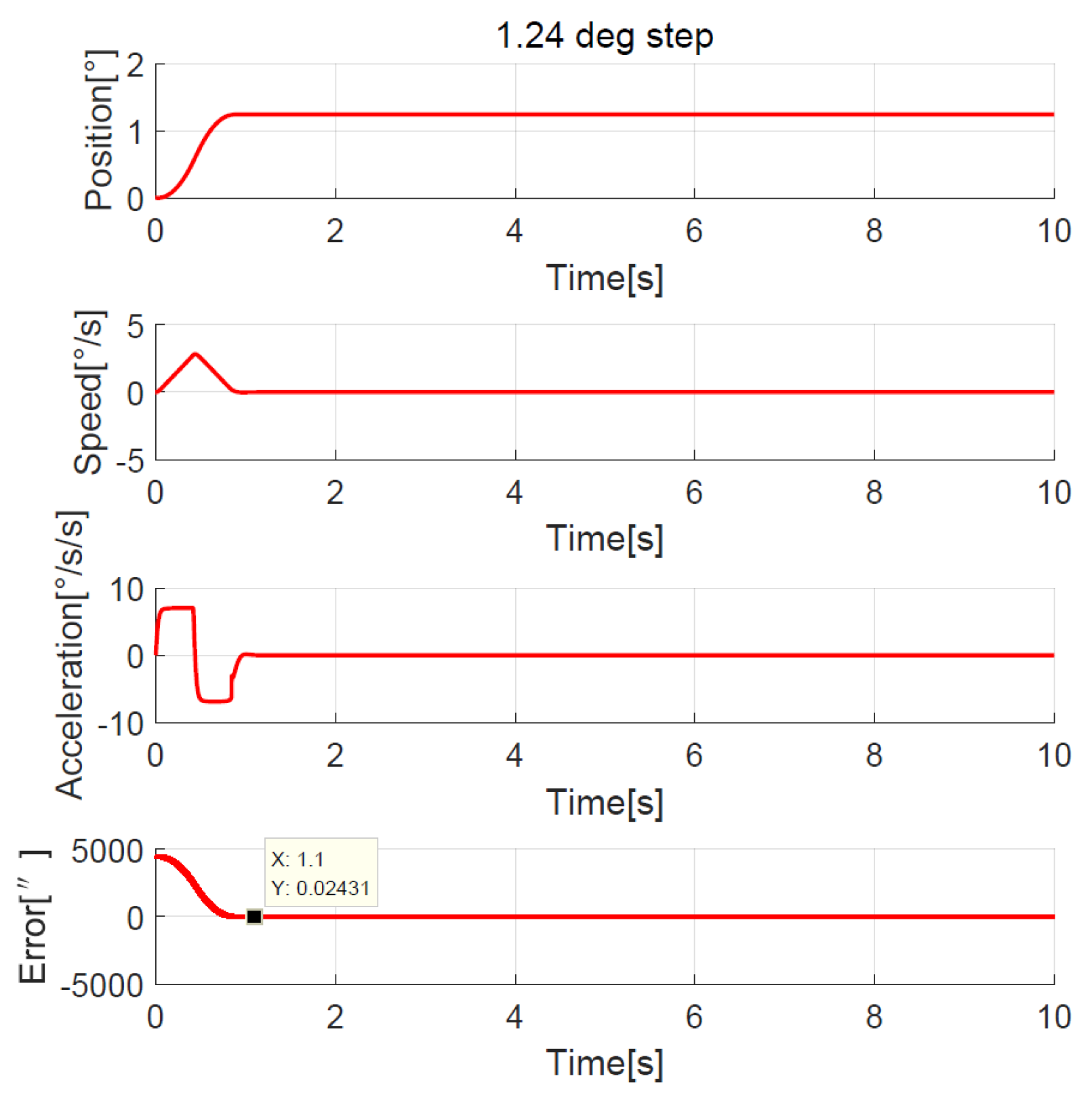
4.4. Fast and Smooth Transition Process
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, X.; Wang, D.; Zhou, W. Azimuth Control for Large Aperture Telescope Based on Segmented Arc Permanent Magnet Synchronous Motors. Res. Astron. Astrophys. 2021, 21, 163. [Google Scholar]
- Deng, Y.; Li, H.; Wang, J. Overview of AC servo control system for the large telescope. Chin. Opt. 2015, 8, 895–908. [Google Scholar] [CrossRef]
- Li, H. Servo system of large telescope based on internal model PID control method. Opt. Precis. Eng. 2009, 17, 327–332. [Google Scholar]
- Jafarov, E.; Parlakci, M.N.A.; Istefanopulos, Y. A New Variable Structure PID-Controller Design for Robot Manipulators. IEEE Trans. Control. Syst. Technol. 2005, 13, 122–130. [Google Scholar]
- Nie, Z.; Zhu, C.; Wang, Q.; Gao, Z.; Shao, H.; Luo, J. Design, analysis and application of a new disturbance rejection PID for uncertain systems. ISA Trans. 2020, 101, 281–294. [Google Scholar] [CrossRef]
- Yang, J.; Chen, W.; Li, S.; Guo, L.; Yan, Y. Disturbance/Uncertainty Estimation and Attenuation Techniques in PMSM Drives—A Survey. IEEE Trans. Ind. Electron. 2005, 64, 3273–3285. [Google Scholar] [CrossRef] [Green Version]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electrn. 2009, 56, 900–906. [Google Scholar]
- Han, J. Active Disturbance Rejection Control Technique: The Technique for Estimating and Compensating the Uncertainties; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Wang, S.; Wang, J.; Deng, Y.; Li, H.; Yin, Y. Active Disturbance Rejection Control of Torque Ripple on Optoelectronic Tracking System. Opt. Precis. Eng. 2012, 39, 7–13. [Google Scholar]
- Yang, X.; Deng, Y.; Zhang, B.; Wang, J. Extended state observer-based control with an adjustable parameter for a large ground-based telescope. Res. Astron. Astrophys. 2021, 21, 316. [Google Scholar]
- Chen, W.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar]
- Sariyildiz, E.; Oboe, R.; Ohnishi, K. Disturbance Observer-Based Robust Control and Its Applications: 35th Anniversary Overview. IEEE Trans. Ind. Electron. 2020, 67, 2042–2053. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Gu, H. Fuzzy Adaptive Internal Model Control Schemes for PMSM Speed-Regulation System. IEEE Trans. Ind. Inform. 2012, 8, 767–779. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.; Chen, W.; Chen, X. Disturbance Observer Based Control: Methods and Applications; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Guo, B.; Bacha, S.; Alamir, M. A review on ADRC based PMSM control designs. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1747–1753. [Google Scholar]
- Taguchi, H.; Araki, M. Two-Degree-of-Freedom PID Controllers—Their Functions and Optimal Tuning. Proceedings of IFAC Workshop on Digital Control: Past, Present and Future of PID Control, Terrassa, Spain, 5–7 April 2000; Volume 33, pp. 91–96. [Google Scholar]
- Zhang, X.; Li, Z. Sliding-Mode Observer-Based Mechanical Parameter Estimation for Permanent Magnet Synchronous Motor. IEEE Trans. Power Electron. 2016, 31, 5732–5745. [Google Scholar] [CrossRef]
- Wang, Q.; Cai, H.; Huang, Y.; Ge, L.; Tang, T.; Su, Y.; Liu, X.; Li, J.; He, D.; Du, S.; et al. Acceleration feedback control (AFC) enhanced by disturbance observation and compensation (DOC) for high precision tracking in telescope systems. Res. Astron. Astrophys. 2016, 16, 124. [Google Scholar] [CrossRef]
- Gawronski, W. Antenna control systems: From PI to H∞. IEEE Antennas Propag. Mag. 2001, 43, 52–60. [Google Scholar] [CrossRef]
- Gawronski, W.; Souccar, K. Control systems of the large millimeter telescope. IEEE Antennas Propag. Mag. 2005, 47, 41–49. [Google Scholar] [CrossRef]
- Chen, W.; Ballance, D. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef] [Green Version]
- Chen, W. Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 2004, 9, 706–710. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, A.; Marquez, H.; Tavakoli, M. Nonlinear Disturbance Observers: Design and Applications to Euler-Lagrange Systems. IEEE Control Syst. Mag. 2017, 37, 50–72. [Google Scholar]
- Bu, X.; Wu, X.; Zhang, R.; Ma, Z.; Huang, J. Tracking differentiator design for the robust backstepping control of a flexible air-breathing hypersonic vehicle. J. Frankl. Inst. 2015, 352, 1739–1765. [Google Scholar] [CrossRef]
- Bu, X.; Wei, D.; He, G. A robust constrained control approach for flexible air-breathing hypersonic vehicles. Int. J. Robust Nonlinear Control 2020, 30, 2752–2776. [Google Scholar] [CrossRef]
- Xue, W.; Huang, Y.; Yang, X. What kinds of system can be used as tracking-differentiator. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010; pp. 6113–6120. [Google Scholar]
- Tang, Y.; Wu, Y.; Wu, M.; Hu, X.; Shen, L. Nonlinear Tracking-Differentiator for Velocity Determination Using Carrier Phase Measurements. IEEE J. Sel. Top. Signal Process. 2009, 3, 716–725. [Google Scholar] [CrossRef]
- Tian, D.; Shen, H.; Dai, M. Improving the Rapidity of Nonlinear Tracking Differentiator via Feedforward. IEEE Trans. Ind. Electron. 2014, 61, 3736–3743. [Google Scholar] [CrossRef]
- Yang, X.; Deng, Y.; Wang, J.; Zhang, B. A Variable Parameter Linear Tracking Differentiator and Its Application in Large Ground-based Telescopes. Res. Astron. Astrophys. 2022, 22, 125013. [Google Scholar] [CrossRef]
- Deng, Y.; Li, H.; Wang, J. Methods of improving closed-loop bandwidth for large telescope large telescope control systems. Infrared Laser Eng. 2018, 47, 11237001. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Synchronous inductance /mH | 23.75 |
| Stator phase resistance | 2.45 |
| Number of pole pairs | 45 |
| Number of slots in stator Z | 270 |
| The torque coefficient | 118 |
| The moment of inertia | 7100 |
| Coefficient of viscous friction | 30 |
| Bus voltage /V | 60 |
| Limited current /A | 10 |
| Parameters | Value |
|---|---|
| Coefficient of viscous friction | 30.0 |
| Coulomb friction | 67.0 |
| Static friction | 140.0 |
| Stribeck speed | 0.0004 |
| Controller Type | Speed Fluctuation/() | Adjustment Time/(s) |
|---|---|---|
| PI | 0.0649 | / |
| ADRC | 0.0679 | 0.216 |
| PI + NDOB | 0.0255 | 0.129 |
| ADRC + NDOB | 0.0219 | 0.113 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Deng, Y.; Li, H.; Wang, J.; Wang, D. Precise and Efficient Pointing Control of a 2.5-m-Wide Field Survey Telescope Using ADRC and Nonlinear Disturbance Observer. Sensors 2023, 23, 6068. https://doi.org/10.3390/s23136068
Liu Y, Deng Y, Li H, Wang J, Wang D. Precise and Efficient Pointing Control of a 2.5-m-Wide Field Survey Telescope Using ADRC and Nonlinear Disturbance Observer. Sensors. 2023; 23(13):6068. https://doi.org/10.3390/s23136068
Chicago/Turabian StyleLiu, Yang, Yongting Deng, Hongwen Li, Jianli Wang, and Dejun Wang. 2023. "Precise and Efficient Pointing Control of a 2.5-m-Wide Field Survey Telescope Using ADRC and Nonlinear Disturbance Observer" Sensors 23, no. 13: 6068. https://doi.org/10.3390/s23136068
APA StyleLiu, Y., Deng, Y., Li, H., Wang, J., & Wang, D. (2023). Precise and Efficient Pointing Control of a 2.5-m-Wide Field Survey Telescope Using ADRC and Nonlinear Disturbance Observer. Sensors, 23(13), 6068. https://doi.org/10.3390/s23136068