
Design of Miniature Ultrawideband Active Magnetic Field Probe Using Integrated Design Idea
 , ,
, ,
Abstract
:1. Introduction
2. Probe Design Method and Construction
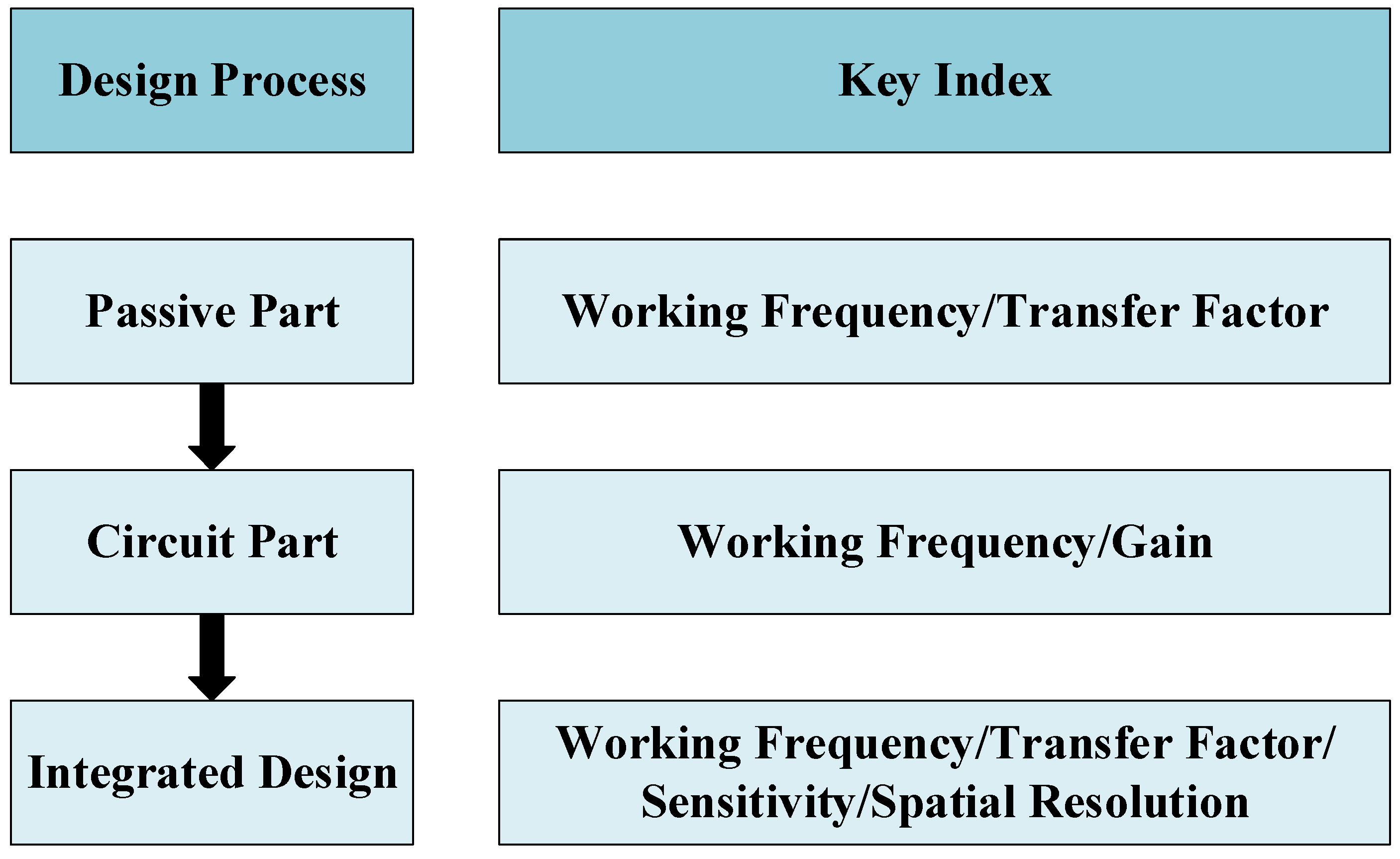
2.1. Probe Design Overview
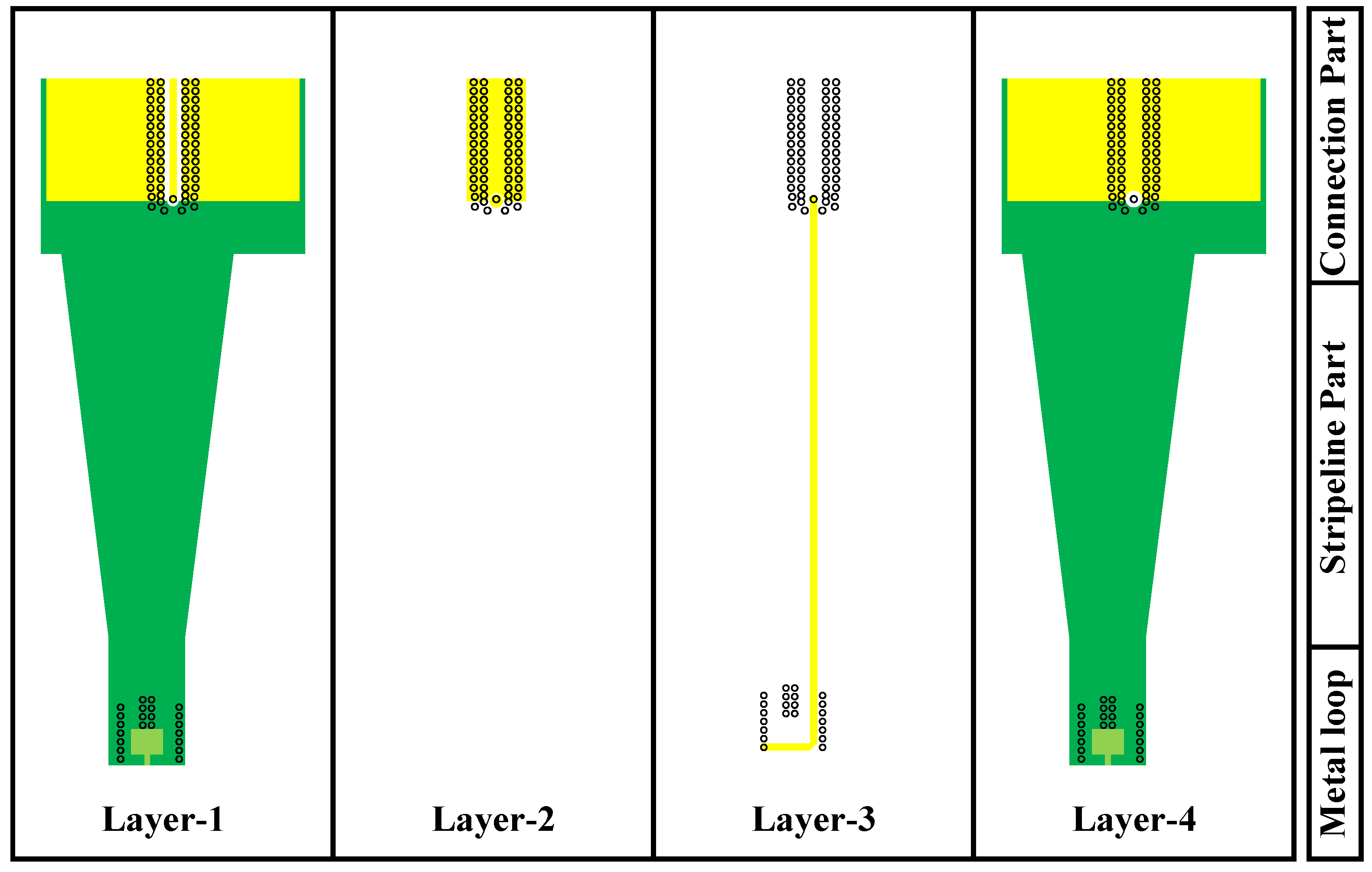
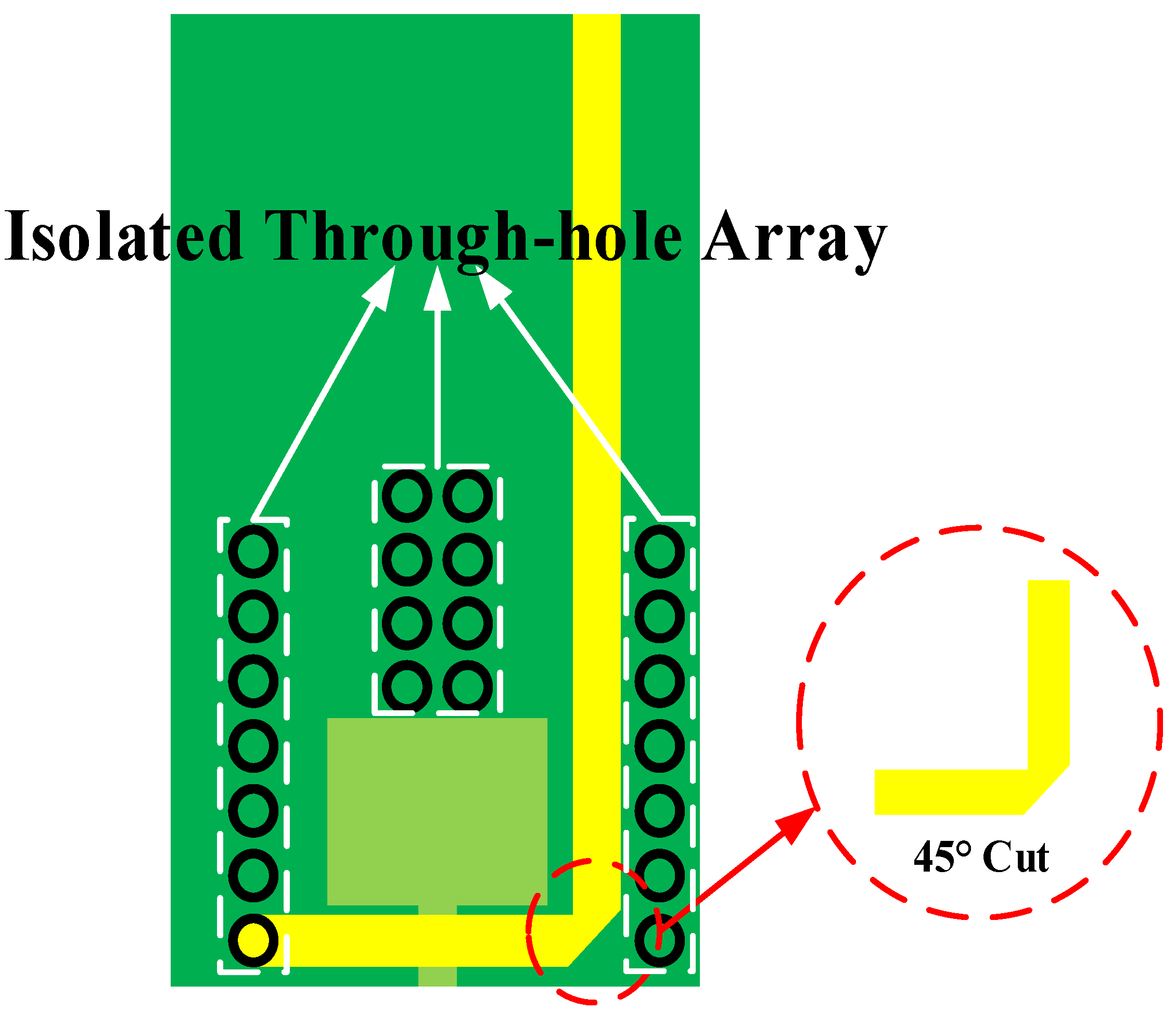
2.2. Design of the Passive Part
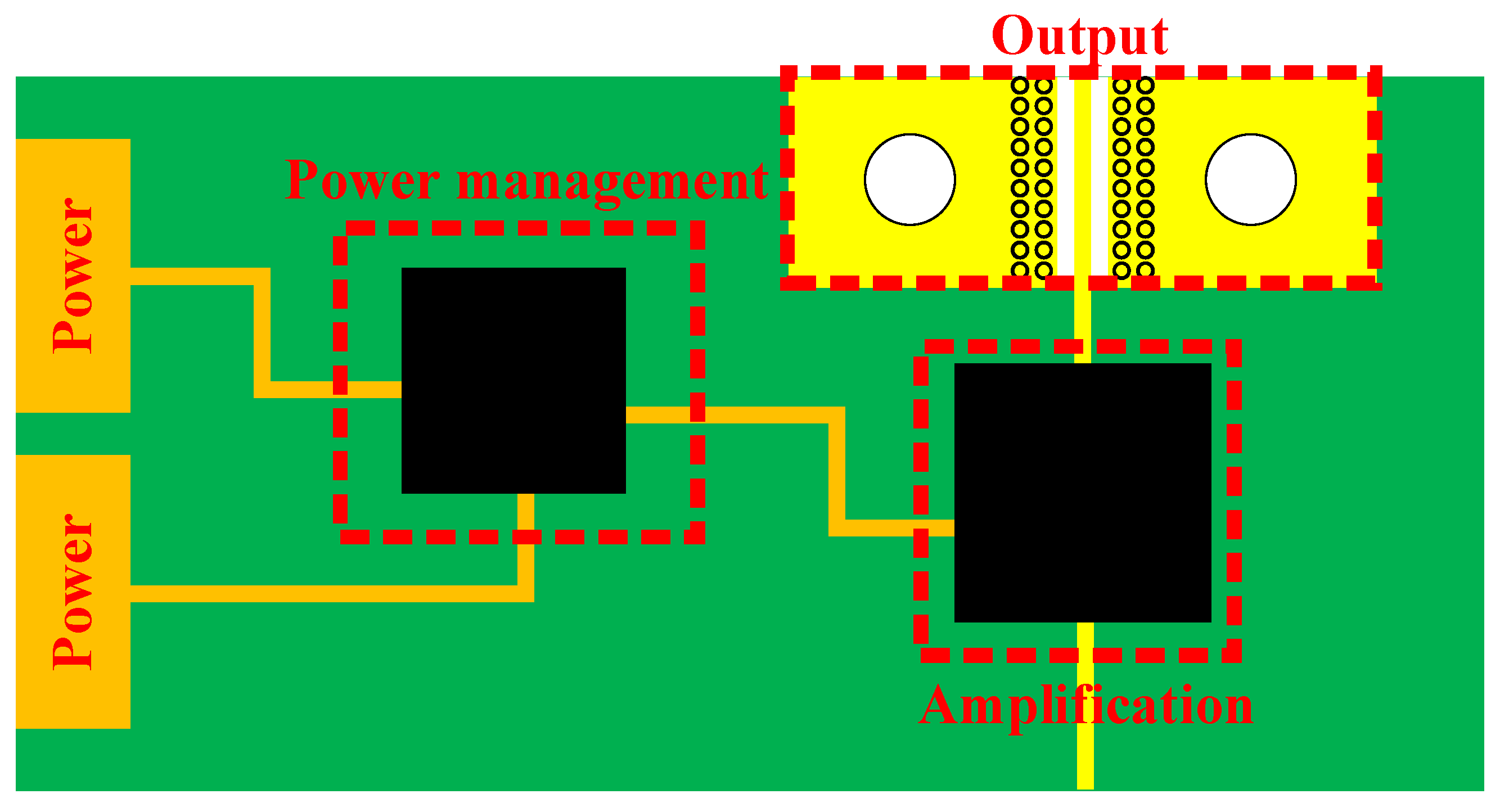
2.3. Design of the Circuit Part
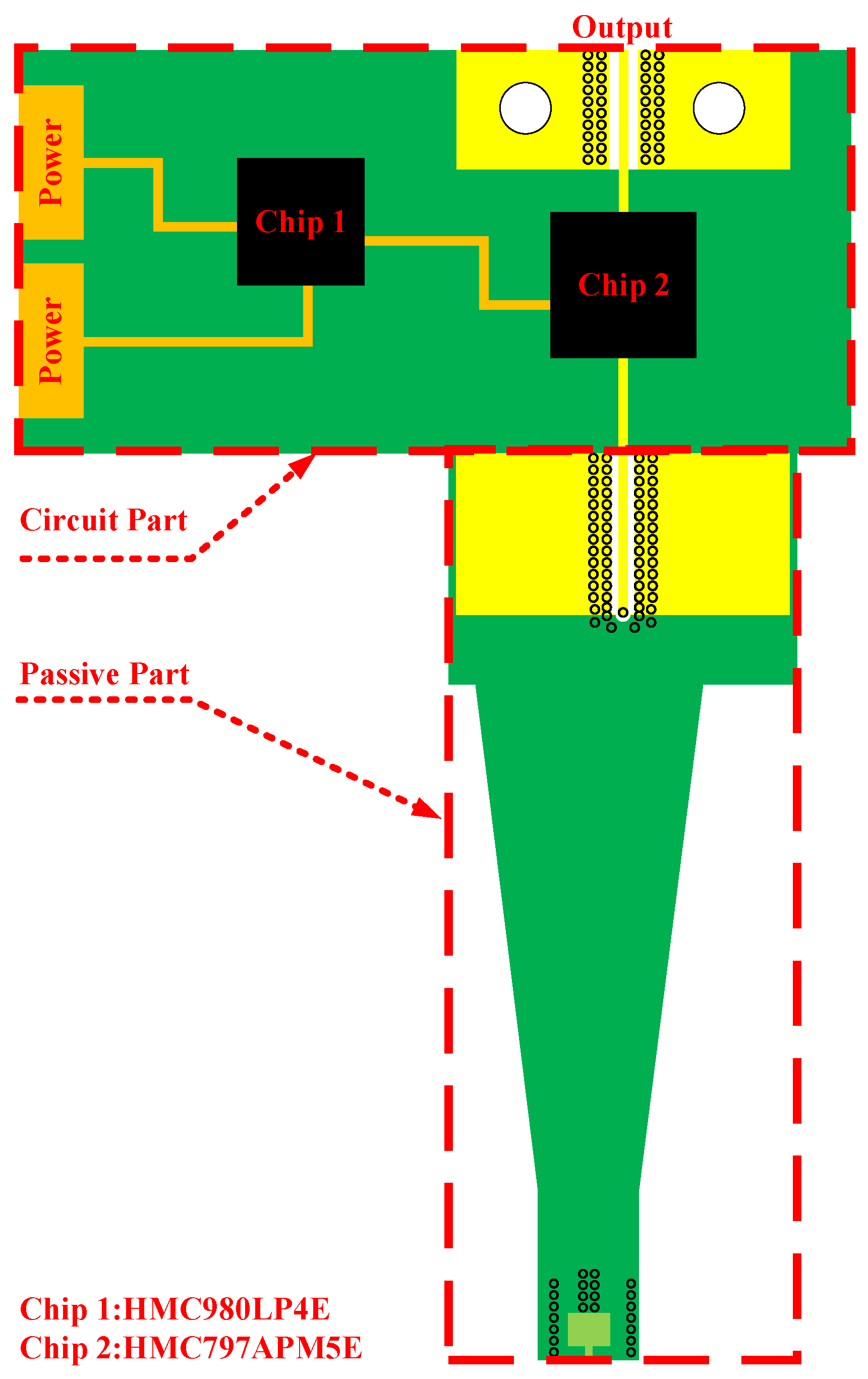
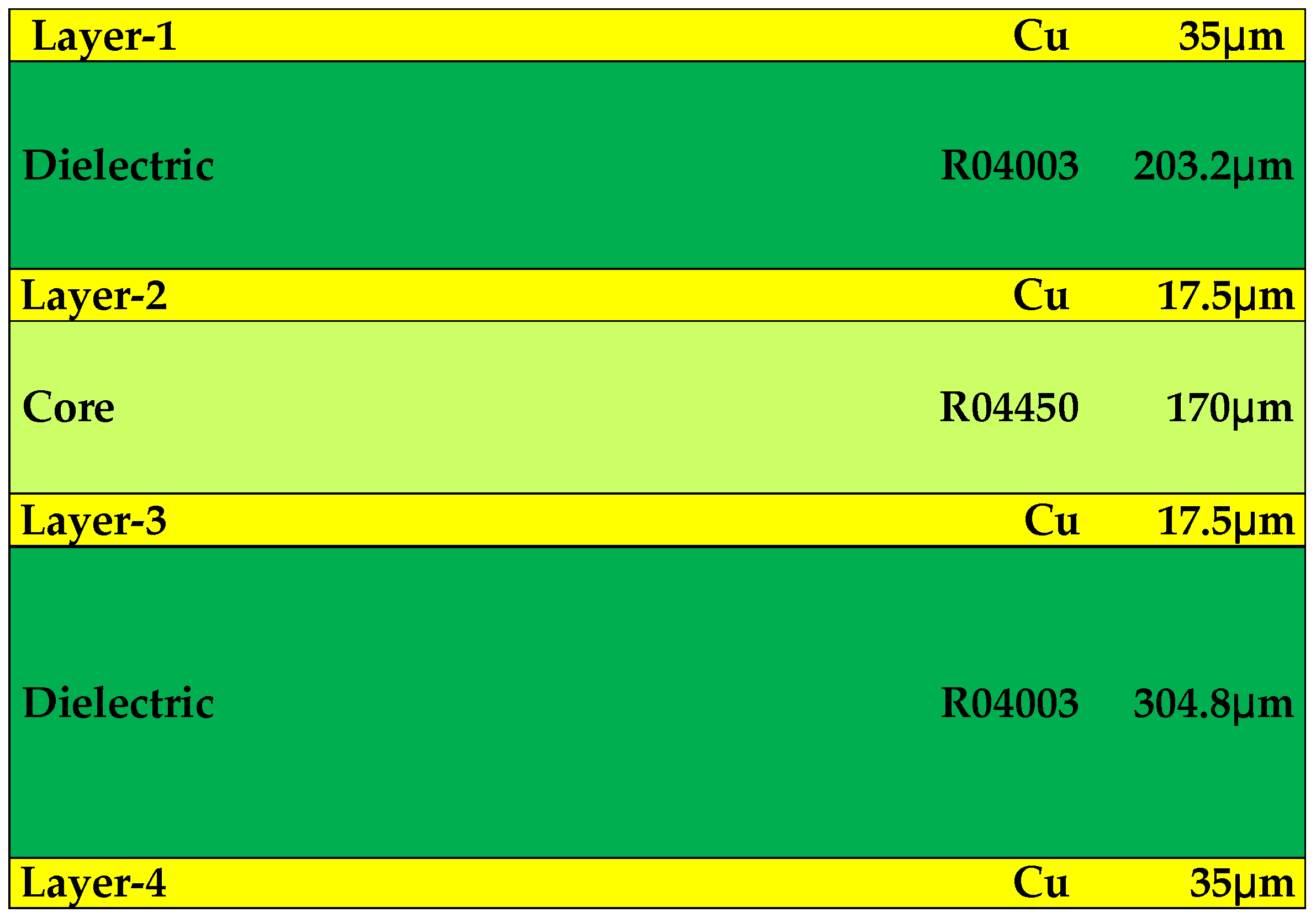
2.4. Integrated Design
3. Measurement and Validation
3.1. Size Measurement
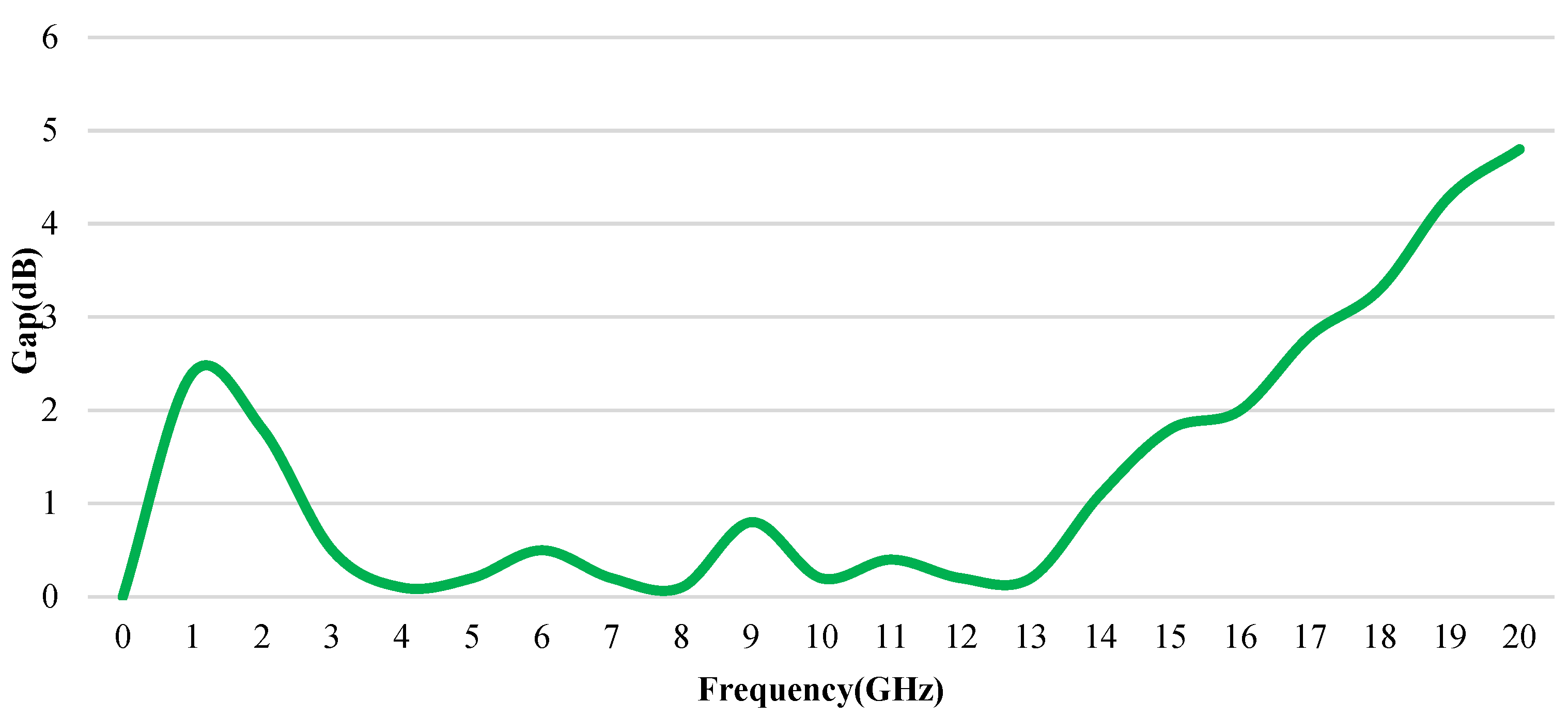
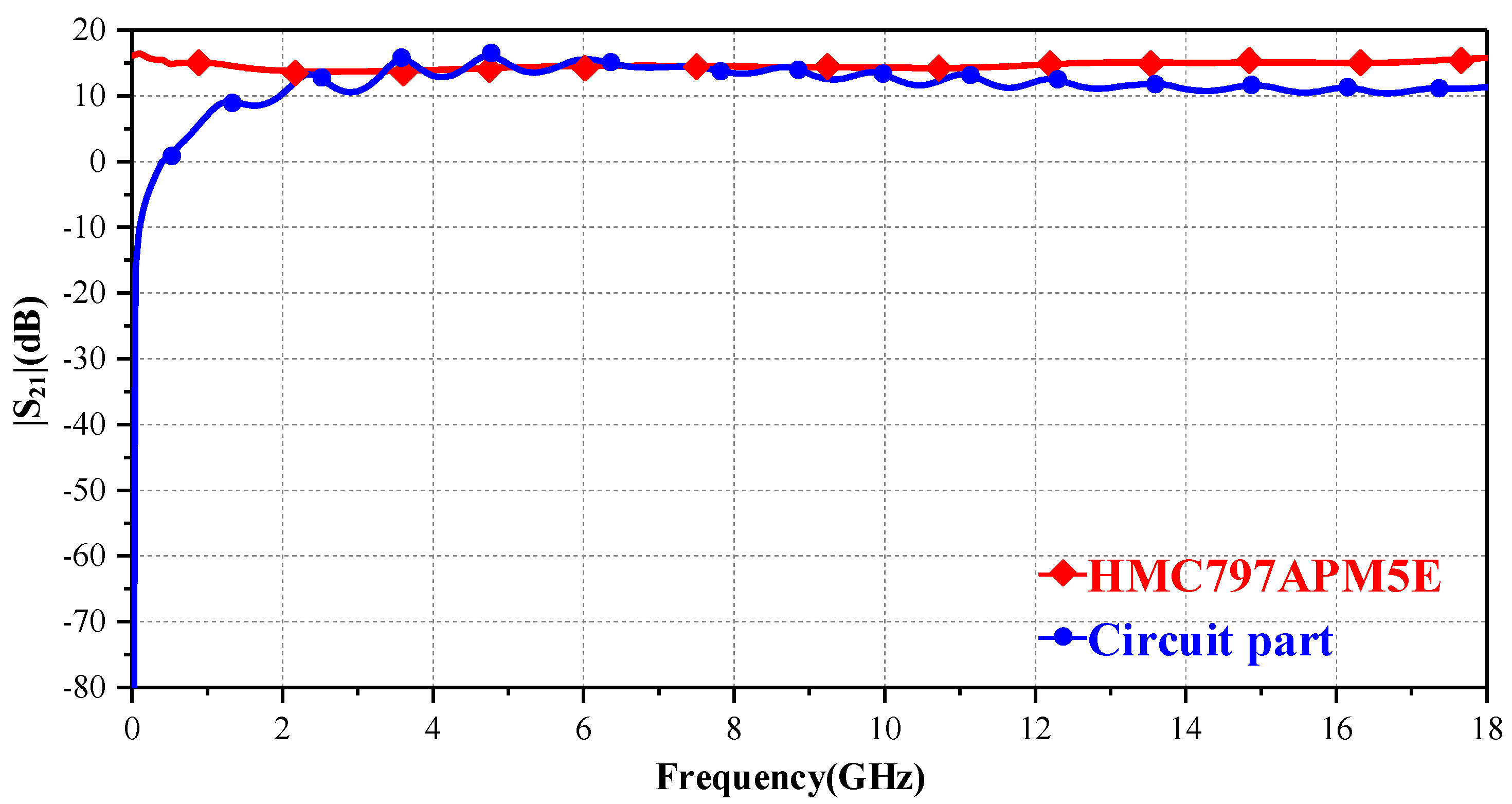
3.2. Frequency Bandwidth and Transfer Factor
3.3. Sensitivity Test
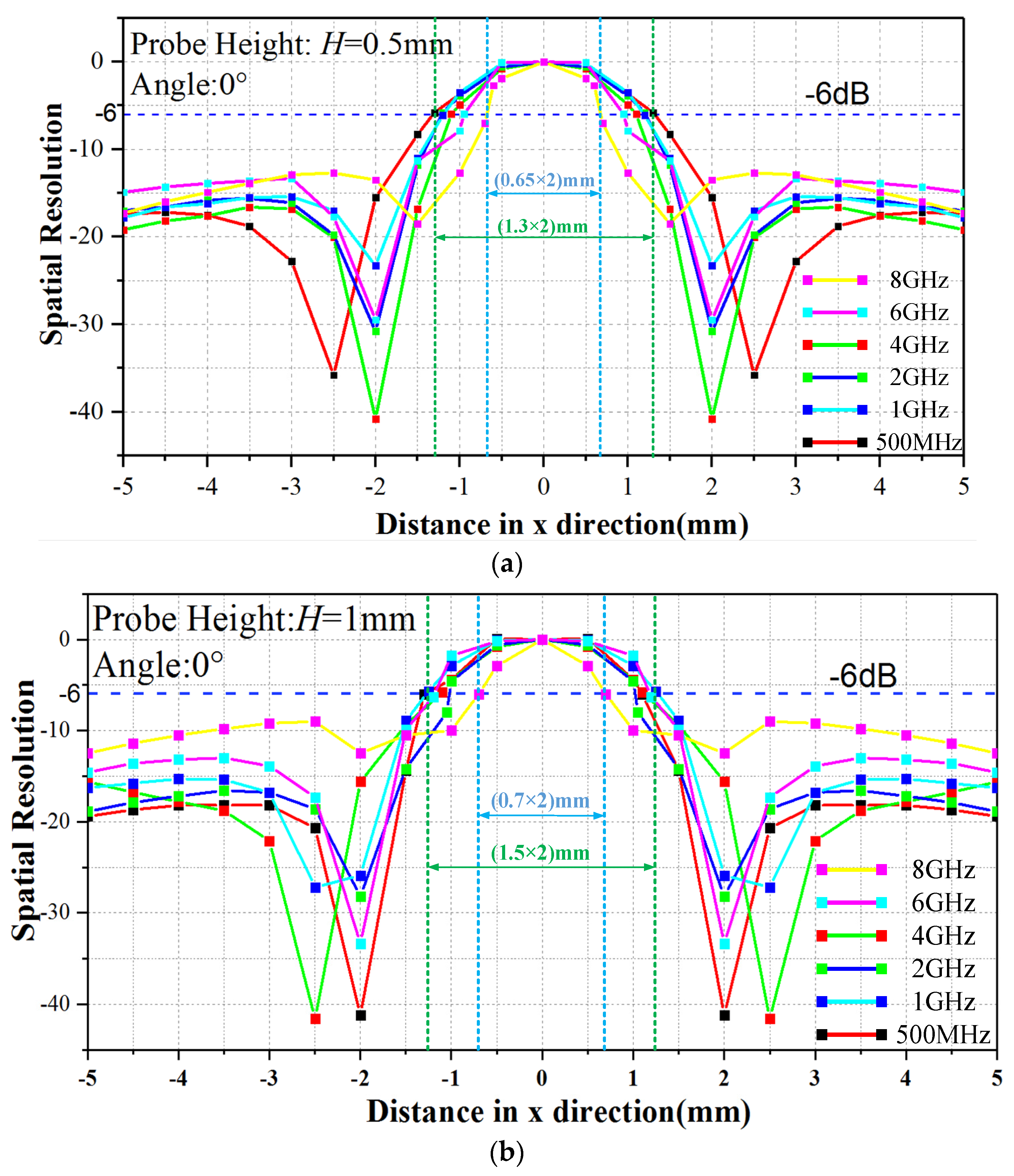
3.4. Spatial Resolution Test
3.5. Linearity Test
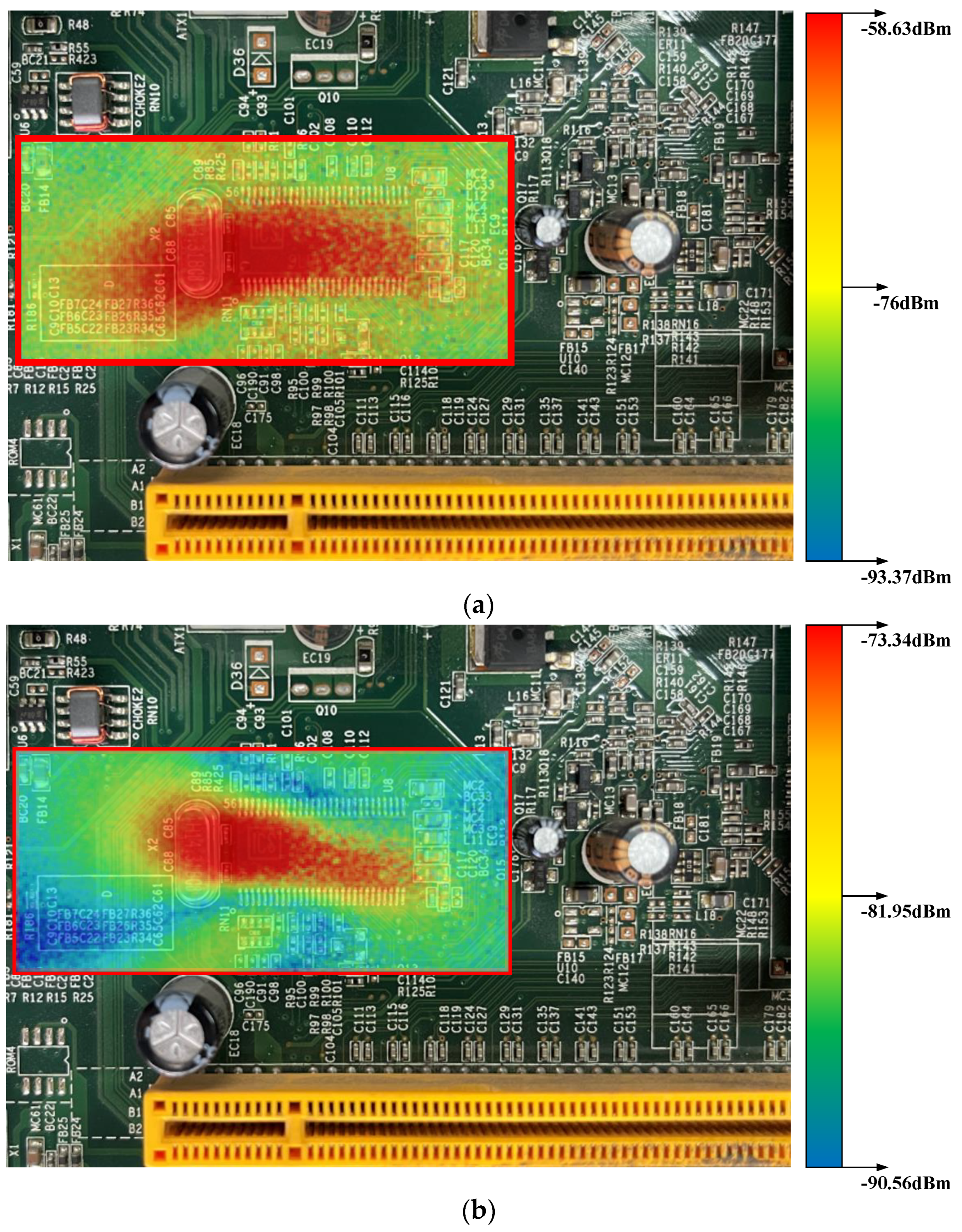
3.6. Applications in Near-Field Measurement
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kobayashi, R.; Kobayashi, T.; Miyazaki, C.; Oka, N.; Oh-hashi, H. Near magnetic field probe for detection of noise current flowing to uncertain directions. In Proceedings of the 2017 International Symposium On Electromagnetic Compatibility EMC EUROPE, Angers, France, 4–8 September 2017; pp. 1–5. [Google Scholar]
- Pan, J.; Li, G.; Zhou, Y.; Bai, Y.; Yu, X.; Zhang, Y.; Fan, J. Measurement validation of the dipole-moment model for IC radiated emissions. In Proceedings of the 2013 IEEE International Symposium on Electromagnetic Compatibility, Denver, CO, USA, 5–9 August 2013; pp. 666–670. [Google Scholar]
- Huang, Q.; Li, L.; Yan, X.; Bae, B.; Park, H.; Hwang, C.; Fan, J. MoM based current reconstruction using near-field scanning. In Proceedings of the 2017 IEEE International Symposium on Electromagnetic Compatibility & Signal/Power Integrity (EMCSI), Washington, DC, USA, 7–11 August 2017; pp. 549–554. [Google Scholar]
- Shen, G.; Yang, S.; Sun, J.; Xu, S.; Pommerenke, D.J.; Khilkevich, V.V. Maximum radiated emissions evaluation for the heatsink/IC structure using the measured near electrical fifield. IEEE Trans. Electromagn. Compat. 2017, 59, 1408–1414. [Google Scholar] [CrossRef]
- Zhang, J.; Kam, K.W.; Min, J.; Khilkevich, V.V.; Pommerenke, D.; Fan, J. An effective method of probe calibration in phase-resolved near- fifield scanning for EMI application. IEEE Trans. Instrum. Meas. 2013, 62, 648–658. [Google Scholar] [CrossRef]
- Weng, H.; Beetner, D.G.; DuBroff, R.E. Prediction of radiated emissions using near-field measurements. IEEE Trans. Electromagn. Compat. 2011, 53, 891–899. [Google Scholar] [CrossRef]
- Qiu, H.; Fang, W.; En, Y.; Huang, Y.; Liu, Y.; Lai, P.; Chen, Y.; Shi, C. Movable Noncontact RF Current Measurement on a PCB Trace. IEEE Trans. Instrum. Meas. 2017, 66, 2464–2473. [Google Scholar] [CrossRef]
- Li, G.; Shao, W.; Chen, R.; Tian, X.; Huang, Q.; Zhang, X.Y.; Fang, W.; Chen, Y. Ultrawideband Differential Magnetic Near Field Probe with High Electric Field Suppression. IEEE Sens. J. 2020, 20, 7669–7676. [Google Scholar] [CrossRef]
- Li, G.; Pommerenke, D.; Min, J. A low frequency electric field probe for near-field measurement in EMC applications. In Proceedings of the 2017 IEEE International Symposium on Electromagnetic Compatibility & Signal/Power Integrity (EMCSI), Washington, DC, USA, 7–11 August 2017; pp. 498–503. [Google Scholar]
- Liu, W.; Yan, Z.; Min, Z.; Ning, Z.; Wang, J. Design of Miniature Active Magnetic Probe for Near-Field Weak Signal Measurement in ICs. IEEE Microw. Wirel. Compon. Lett. 2020, 30, 312–315. [Google Scholar] [CrossRef]
- Min, Z.; Yan, Z.; Liu, W.; Wang, J.; Su, D.; Yan, X. A Miniature High-Sensitivity Active Electric Field Probe for Near-Field Measurement. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2552–2556. [Google Scholar] [CrossRef]
- Chang, Y.-C.; Wang, P.-Y.; Chang, D.-C.; Hsu, S.S.H. A Low-Loss Fully Integrated CMOS Active Probe for Gigahertz Conducted EMI Test. IEEE Trans. Microw. Theory Tech. 2019, 67, 1652–1660. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, W.; Wang, J.; Su, D.; Yan, X.; Fan, J. Noncontact Wideband Current Probes with High Sensitivity and Spatial Resolution for Noise Location on PCB. IEEE Trans. Instrum. Meas. 2018, 67, 2881–2891. [Google Scholar] [CrossRef]
- Zhou, Y.; Yan, Z.; Wang, J.; Hu, K.; Zhao, D.; Chen, Y.; Zhao, Y. A Miniaturized Ultrawideband Active Electric Probe with High Sensitivity for Near-Field Measurement. IEEE Trans. Instrum. Meas. 2022, 71, 8003608. [Google Scholar] [CrossRef]
- Chou, Y.T.; Lu, H.-C. Space difference magnetic near-field probe with spatial resolution improvement. IEEE Trans. Microw. Theory Tech. 2013, 61, 4233–4244. [Google Scholar] [CrossRef]
- IEC 61967-3; Integrated Circuits—Measurement of Electromagnetic Emission, 150 kHz to 1 GHz—Part 6: Magnetic Probe Method. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Wang, J.; Yan, Z.; Fu, C.; Ma, Z.; Liu, J. Near-Field Precision Measurement System of High-Density Integrated Module. IEEE Trans. Instrum. Meas. 2021, 70, 9509109. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, J.; Zhang, W.; Wang, Y.; Fan, J. A Simple Miniature Ultrawideband Magnetic Field Probe Design for Magnetic Near-Field Measurements. IEEE Trans. Antennas Propag. 2016, 64, 5459–5465. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Proposed Probe | Commercial Probe | Probe in [13] |
|---|---|---|---|
| 9 kHz | 10 dBm | 16 dBm | 13 dBm |
| 1 MHz | −25 dBm | −15 dBm | −20 dBm |
| 500 MHz | −50 dBm | −35 dBm | −40 dBm |
| 1 GHz | −70 dBm | −51 dBm | −56 dBm |
| 3 GHz | −71 dBm | −52 dBm | −55 dBm |
| 5 GHz | −72 dBm | −57 dBm | −56 dBm |
| 10 GHz | −74 dBm | −20 dBm | −54 dBm |
| 14 GHz | −72 dBm | ||
| 18 GHz | −74 dBm |
| Parameter | Value |
|---|---|
| High P1dB Output Power | 29 dBm |
| High Psat Output Power | 31 dBm |
| High Gain | 15 dB |
| High Output IP3 | 41 dBm |
| RF Input Power | 27 dBm |
| Matched Input/Output | 50 Ohm |
| Operating Temperature | −40 to +85 °C |
| ESD Sensitivity (HBM) Class | 1A—Passed 250 V |
| Probe | BW (Hz) | Size (mm × mm) | TF (dB) | SR (mm) | Gain (dB) |
|---|---|---|---|---|---|
| Proposed Probe | 9 k~18 G | 64 × 41.5 | <0 | 0.65 | 25 |
| Probe in [10] | 9 k~1 G | 60 × 19 | <0 | 0.9 | 33 |
| Commercial Probe | 1 M~6 G | - | - | 0.3 | - |
| Probe in [13] | 9 k~20 G | 85 × 15 | <−30 | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Yan, Z.; Ma, Z.; Zhao, Y.; Gao, J.; Cheng, R.; Huang, B. Design of Miniature Ultrawideband Active Magnetic Field Probe Using Integrated Design Idea. Sensors 2023, 23, 6170. https://doi.org/10.3390/s23136170
Zhou Y, Yan Z, Ma Z, Zhao Y, Gao J, Cheng R, Huang B. Design of Miniature Ultrawideband Active Magnetic Field Probe Using Integrated Design Idea. Sensors. 2023; 23(13):6170. https://doi.org/10.3390/s23136170
Chicago/Turabian StyleZhou, Yang, Zhaowen Yan, Zhangqiang Ma, Yang Zhao, Jie Gao, Ruiqi Cheng, and Baocheng Huang. 2023. "Design of Miniature Ultrawideband Active Magnetic Field Probe Using Integrated Design Idea" Sensors 23, no. 13: 6170. https://doi.org/10.3390/s23136170