Abstract
Robotic systems for lower limb rehabilitation are essential for improving patients’ physical conditions in lower limb rehabilitation and assisting patients with various locomotor dysfunctions. These robotic systems mainly integrate sensors, actuation, and control systems and combine features from bionics, robotics, control, medicine, and other interdisciplinary fields. Several lower limb robotic systems have been proposed in the patent literature; some are commercially available. This review is an in-depth study of the patents related to robotic rehabilitation systems for lower limbs from the point of view of the sensors and actuation systems used. The patents awarded and published between 2013 and 2023 were investigated, and the temporal distribution of these patents is presented. Our results were obtained by examining the analyzed information from the three public patent databases. The patents were selected so that there were no duplicates after several filters were used in this review. For each patent database, the patents were analyzed according to the category of sensors and the number of sensors used. Additionally, for the main categories of sensors, an analysis was conducted depending on the type of sensors used. Afterwards, the actuation solutions for robotic rehabilitation systems for upper limbs described in the patents were analyzed, highlighting the main trends in their use. The results are presented with a schematic approach so that any user can easily find patents that use a specific type of sensor or a particular type of actuation system, and the sensors or actuation systems recommended to be used in some instances are highlighted.
1. Introduction
Humans, or hominins, possess three distinct features that set them apart from other primates: bipedal walking, evolved hands, and a larger brain capacity. While walking on two legs offers advantages, such as better mobility, it also has drawbacks, such as putting pressure on organs, causing spinal problems, and slower movement. Being unable to walk can also have significant psychological effects in modern society.
Unfortunately, various diseases and injuries can impact the lower limbs, including the ankle, knee, and hip. The lower limbs play a crucial role in an individual’s gait. One’s gait, rhythm, and posture can provide important information about their overall health. Medical professionals have identified multiple gait patterns that can indicate different ailments or health issues.
Maintaining a healthy posture and gait is essential for one’s overall well-being. A proper gait enables individuals to achieve functional independence, making detecting and analyzing gait disorders imperative to enhance rehabilitation efforts and prevent complications. Optimal recovery outcomes can be achieved by using rehabilitation, gait training, and assistive/recovery devices.
Robot-assisted lower limb rehabilitation and assistive technology have fascinated engineers and researchers, providing much-needed assistance to individuals suffering from illnesses or injuries. As a result, various robotic lower limb devices and exoskeletons have been proposed and developed, some of which are already available for commercial use.
Rehabilitation robotic systems are categorized based on the body part they aid in the recovery process. They are designed to assist with the upper limb, lower limb, hand, or entire body. The system’s purpose and number of degrees of freedom influence its design and manufacturing solutions. Additionally, there are two types of rehabilitation systems: active and passive, depending on the motor involvement of the patient during recovery activities.
Two options exist to place actuators: distally or directly at the joint level. The distal option requires a torque transmission mechanism to the joint, while the direct joint level option does not need it but may increase the inertia of the moving parts. Each position has its advantages and disadvantages to consider.
Rehabilitation robotic systems have utilized different actuation systems depending on the energy source, such as electric, pneumatic, or hydraulic. Each of these systems comes with its own set of benefits and drawbacks. Additionally, unconventional actuators, such as shape memory alloys, electroactive polymers, and magneto-rheologic fluids, have been tested and analyzed.
Various sensing technologies have been successfully incorporated into robotic rehabilitation systems. These sensors can measure limb movements, forces, torques, bio-signals, etc.
Assistive robotic systems, such as exoskeletons, are mechatronic systems that utilize mechanics, sensors, actuators, and control components. The specialized literature provides numerous reviews on the current state of rehabilitation systems for the lower limbs, specifically regarding their sensors and actuation systems. These reviews focus solely on experimental models developed by research teams or commercial models produced by companies.
As a novelty, our review is an in-depth study of the patents related to rehabilitation robotic systems for lower limbs from the point of view of the sensors and actuation systems used. The patents awarded and published between 2013 and 2023 were investigated, and the temporal distribution of these patents is presented. Our results were obtained by examining the analyzed information from the three public patent databases (Google Patents, Patent-Scope, Lens). The patents were selected so that there were no duplicates after several filters were used in this review. For each patent database, the patents were analyzed according to the category of sensors and the number of sensors used. Additionally, for the main categories of sensors, an analysis was conducted depending on the type of sensors used. Afterwards, the actuation solutions for rehabilitation robotic systems for lower limbs described in the patents were analyzed, highlighting the main trends in their use.
Through this review, the authors want to help researchers by recommending sensors and actuation systems to be used in robotic systems to recover the lower limb by easily and quickly finding patents that use a specific sensor or actuation system.
Compared to other reviews that have investigated book chapters, journals, and conference papers, our study analyzed patents, categorizing them according to different sensors or actuation systems used to show significant indications regarding the trends of research activity in this field.
The first selection of patents was based on two criteria: to be a rehabilitation robotic system according to the purpose of their use, namely if they were used for the recovery of the lower limb.
Investigating the technical solutions of sensors and actuation systems proposed for robotic systems for the recovery of the lower limb can be a helpful contribution to future projects. This review can also be a valuable source of information for researchers and therapists in their work.
It is known that there are differences between the patents and scientific papers published in journals or conference proceedings, for example, from the evaluation point of view or their purpose. Patent evaluations are carried out differently than journal publications, depending on the requirements imposed by the patent laws of a particular country.
There are numerous publications (reviews that investigate book chapters, journals, and conference papers) about technological advances and available solutions for robotic systems in the rehabilitation of the upper or lower limbs. In the following, we mention only a few of them and what analyses their authors have carried out. A review was presented by Ho Shing Lo et al. in 2012 [1], while Maciejasz et al. provided a comprehensive analysis of robotic systems for upper limb rehabilitation in 2014 [2], covering various areas such as aim, target group, type of assistance, mechanical design, control strategy, and clinical evaluation. Other notable review papers in this field include Blank et al.’s (2014) paper [3] on promoting patient engagement in therapy, Babaiasl et al.’s (2015) paper [4] on rehabilitation robots and their clinical outcomes, and Rehmat et al.’s (2018) paper [5] on the use of robotic exoskeleton systems, mechanical structures, and control strategies. Furthermore, Manna et al. conducted a comparative study of actuation systems in 2018 [6], while Sanjiuan et al. explored construction solutions based on cable transmission in 2020 [7]. Lastly, Sobiech et al.’s (2022) paper [8] focused on exoskeletons that can rehabilitate three joints: wrist and hand joints, elbow joints, and shoulder and clavicle joints.
Over time, there have been many scientific works whose authors presented the state of the art or reviewed what has been designed, developed, or tested as a robotic system for the recovery of the lower limb. In the order of their appearance, only a few are presented in this work. One of the first works that carried out a literature review on lower limb robotic rehabilitation, as well as on the challenges in this field, was the work of Inaki Dıaz et al. in 2011 [9]. A few years later, Young and Ferris, in 2017 [10], presented the state of the art and future directions for lower limb robotic exoskeletons from their perspective.
Eiammanussakul and Sangveraphunsiri, in 2018 [11], presented a lower limb rehabilitation robot in a sitting position with a review of training activities. Additionally, in 2018, Carpino et al. [12] presented a meta-analysis and state of the art assessing the effectiveness and costs of robot-mediated lower limbs rehabilitation. In 2019, Sanchez-Villamañan et al. [13] comprehensively reviewed mechanical design principles for compliant lower limb exoskeletons. Shi et al. [14] reviewed lower limb rehabilitation exoskeleton robots.
Hobbs and Artemiadis, in 2020 [15], conducted a review of robot-assisted lower limb stroke therapy. They highlighted unexplored paths and future directions in gait rehabilitation. In 2021, Chaichaowarat et al. [16] presented actuators and sensors for rehabilitation robotics, Zhou et al. [17] achieved a review on lower limb rehabilitation exoskeleton robots, and Rodríguez-Fernández et al. [18] presented a systematic review on wearable lower limb exoskeletons for gait training in neuromuscular impairments.
Numerous materials have been used for lower limb rehabilitation robotic systems, resulting in the design of various robotic exoskeletons for patient gait assistance. Hussain et al., in 2021 [19], highlighted the importance of the choice of materials in constructing exoskeleton robotic systems and the advantages and disadvantages of different materials and manufacturing methods. Their review showed that material selection strongly affects the weight and performance of the robotic exoskeleton.
Sarajchi et al., in 2021 [20], published a systematic review of the mechanical design, actuation type, control strategy, and clinical evaluation of wearable lower limb exoskeleton for children with cerebral palsy.
In 2022, Tiboni et al. [21] presented a review on sensors and actuation technologies in exoskeletons. Sierra et al. [22] presented kinematics, actuation, and sensing architectures for rehabilitation and assistive robotics. Neťuková et al. [23] presented the state of the art of lower limb exoskeleton sensors. Massardi et al. [24] published a review on the characterization and evaluation of human–exoskeleton interaction dynamics.
Mathew et al., in 2023 [25], presented a systematic review of technological advancements in signal sensing, actuation, control, and training methods for robotic exoskeletons for rehabilitation.
Usually, the key technical information is not described in the papers. Many of the solutions proposed in the papers are experimental models, which are not patented. There are quite a few commercial solutions on the market. For these reasons, this review of the existing patents for the sensor and actuation systems of robotic rehabilitation systems was carried out.
In our thorough research of the literature, we did not come across any detailed analyses of patents related to sensors and actuators in the past decade. While some reviews touch on this subject (sensors and actuators), they rely solely on published papers.
This paper is organized as follows: Section 2 describes the research method regarding the analysis of patents from the point of view of sensors and actuation systems used by rehabilitation robotic systems for the lower limb. Section 3 reports the results of the patent review of the three analyzed patent databases, while in Section 4, the authors discuss the results of the patent review of sensors and actuation systems used by rehabilitation robotic systems for the lower limbs. Section 5 summarizes the most significant conclusions of this review paper.
2. Materials and Methods
2.1. Data Collection
Depending on the use of these devices for recovering the lower limbs, we can catalog them in robotic assistance and therapeutic exoskeletons for rehabilitation. The first category of robotic lower limb exoskeletons allows users to complete movements that they could not perform independently with the additional help of crutches. On the other hand, the second category is intended for the realization of therapeutic exercises by the user by training the muscles and the nervous system. However, some devices are combinations of the two categories, which is helpful for treating patients with locomotor difficulties by increasing their current physical capacities.
The data used by us in this study were collected from three online patent databases: Google Patents, Patent-Scope, and Lens, from 1 January 2013, to 31 March 2023, using the following search terms: (Exoskeleton) AND (Robot) AND (Walk OR Gait) AND ((Leg OR Lower) AND (Limb OR Extremity)) AND (Rehabilitation).
2.2. Analysis Method
2.2.1. Inclusion Criteria
All patterns must be:
Filter 1: Published in or translated to English, and directly related to lower limb rehabilitation robotic systems.
Filter 2: Related to the International Patent Classification (IPC) A61H3/00 (appliances for aiding patients or disabled persons to walk using orthopaedical devices for correcting deformities of, or supporting, limbs (A61F 5/0102), knees (A61F 5/0106), or feet or ankles (A61F 5/0111).
Filter 3: Describes the design of a robotic system (exoskeleton) and contains data on the sensors and/or actuation system used.
Filter 4: Registered in any patent office in any country.
Filter 5: Awarded and published.
2.2.2. Exclusion Criteria
All patterns must not be:
Filter 6: Related to rehabilitating the upper limbs (hand or arm).
Filter 7: Inactive, suspended, or pending legal status.
Filter 8: The publication date of the patent was not before 1 January 2013.
Filter 9: Methods that do not contain the description of the exoskeleton, sensors, and/or the actuation system.
Filter 10: Appear in duplicate, triplicate, etc.
2.2.3. Search Methodology
We used a long-term analysis technique to determine the types of sensors and actuation systems used in the patents published in the last decade. Then, by comparison, we determined which are predominant.
With the above keywords and Filters 1, 2, 4, 6, and 7, we initially retrieved 5012 patents on Google Patents, 39 patents on Patent-Scope, and 1029 patents on Lens. Then, after applying Filters 3, 5, and 8, we obtained 1615 patents from Google Patents, 27 patents from Patent-Scope, and 122 patents from Lens. Finally, after using Filters 9 and 10, we obtained 283 patents on Google Patents; the exact number remained on Patent-Scope, and 67 patents were published on Lens.
3. Results
Based on our thorough analysis of the three platforms, we have compiled conclusive results categorized into two sections: sensors and actuation systems.
3.1. Sensors
In general, the senses of a robotic system are realized with the help of sensors that allow for the evaluation of the environment in which it operates. Based on the data collected from the sensors, the robot can adjust its actions. Over time, both researchers and engineers have contributed to the development of many types of sensors. Depending on the needs, a limited number of sensors or a plurality of sensors can be used.
We have compiled a comprehensive list of commonly used sensors, arranged alphabetically for easy reference. The types of sensors included in this list are:
- Acceleration: Used to determine the acceleration of the leg/foot.
- Bio-sensor: A highly sophisticated device that effectively gathers data on a user’s biological information. It is designed to measure physical or chemical reactions with utmost precision by generating signals corresponding to an analyte’s concentration in the response. This sensor can be:
- ➢
- Electromyogram (EMG): Used to measure muscle tension;
- ➢
- Electrodermal activity (EDA): Used to measure changes in perspiration rate;
- ➢
- Finger pulse: Used to measure blood pressure and heartbeat;
- ➢
- Electroencephalogram (EEG): Used to measure electrical brain activity;
- ➢
- Electrocardiogram (ECG/EKG): Records electrical signals passing through the heart;
- ➢
- Electrooculography (EOG): Used to graphically record the potential difference between the cornea and the posterior pole during dark adaptation when the eyes move from left to right at a standard distance;
- ➢
- Body temperature;
- ➢
- Heart rate monitors (HR), etc.
- Distance/detection: Used either to determine the location in the space of the exoskeleton or for detection. Various sensing technologies are available, including ultrasonic, infrared (IR), LIDAR, time-of-flight (ToF), GPS, radar, and proximity sensors;
- Encoder: Typically used in motion control to provide information about the position, speed, and direction. An array of sensor types exists, including linear, rotary, angle, absolute, incremental, optical, magnetic, capacitive, and quadrature sensors;
- Force: Used to measure the amount of force applied. A diverse range of force sensors catering to a variety of applications is available, including load cells (pneumatic, hydraulic, piezoelectric crystal, inductive, capacitive, magnetostrictive, strain gage), force sensing resistors (FSRs), optical force sensors, ultrasonic force sensors, force-torque (F/T), tension–pressure, tension, pulling, and frictional sensors;
- Force–torque (F/T): Used to measure the amount of reaction force produced by an object generating torque;
- Hall effect: Measures the voltage fluctuations when the device is exposed to a magnetic field;
- Inertial measurement unit (IMU): Gauges the exoskeleton’s orientation and tracks movements across various axes. Different types of sensors are available, including gyroscopes, accelerometers, and magnetometers, which can be utilized for various purposes;
- Position or motion sensor: Adept at detecting and transforming an object’s movement into signals that can be effectively harnessed for processing, transmission, or control motion objectives. Numerous sensor types are available, such as active detectors, passive infrared sensors, microwave sensors, ultrasonic sensors, tomographic motion detectors, video cameras, gesture detectors, and dual-technology motion sensors;
- Potentiometer: Used to provide feedback on a specific voltage value, which is then used to detect the motor’s position;
- Pressure: Commonly utilized for measuring air or fluid pressure and foot pressure on the sole/in-shoe or platform;
- Tension: Used to measure the tension force of the pneumatic muscle.
- Tilt: Used to detect orientation or inclination;
- Torque: Measures the torque electric motors produce on the joints along the sagittal plane;
- Other: This group comprises infrequently employed sensors (only once) in the patents reviewed, including audio alarm, flex, temperature, current, and voltage sensors.
3.1.1. Google Patents Platform
The distribution of patents based on the number of sensors they utilize is illustrated in Figure 1.
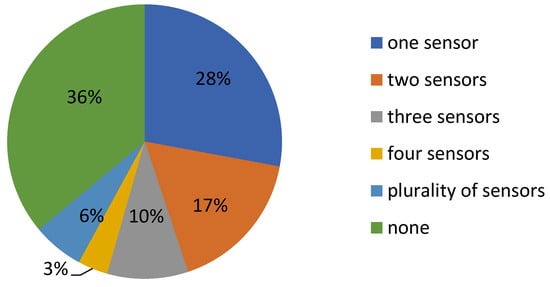
Figure 1.
Distribution of patents on the Google Patents platform, according to the number of sensors used.
In analyzing Figure 1, it is evident that most patents (36%) did not specify the use of the sensors or only mentioned them in a generic context. These patents primarily emphasize the construction or actuation aspects of the devices. A substantial portion of patents (28% of the total) utilized only one type of sensor. Conversely, the patents which utilized four types of sensors had the lowest percentage, at 3%. Patents that used more than five sensors were established for a plurality of sensors, making up a percentage of 6%.
Table 1 presents the bibliographic references according to the type of sensor used. Bibliographic references where sensors were not used or given, such as patents [26,27,28,29], were removed. In Figure 2, the distribution of the patents is displayed according to the type of sensor used.

Table 1.
Bibliographic references of sensors on the Google Patents platform, in alphabetical order.
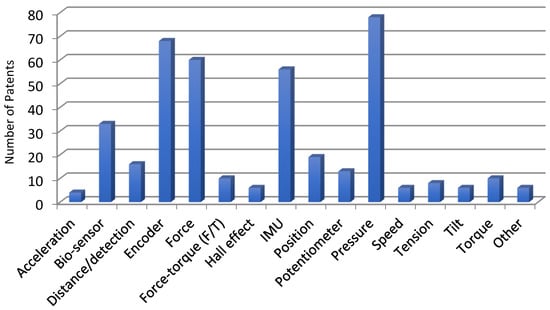
Figure 2.
The distribution of patents on the Google Patents platform depends on the types of sensors used.
Pressure actuation-based sensors were the most commonly used, with nearly 30% of patents including them in their components. According to Table 2, foot plantar sensors were the most frequently used pressure sensors. This was expected, as a significant number of exoskeletons follow the step cycle of users.
Table 2.
The distribution of the use of pressure sensors in the patents on the Google Patents platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
When transmitting and transforming information, the encoder plays a crucial role. It is interesting to note that nearly 24.03% of the exoskeletons contained this element. For more detailed information on the usage of encoders, please refer to Table 3.
Table 3.
The distribution of the use of encoders in the patents pm the Google Patents platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
Proper handling of the force sensor is essential. Table 4 shows the different types of forces that are employed. Among the 283 projects found on Google Patents, 21.20% involved the utilization of force sensors.
Table 4.
The distribution of the use of force sensors in the patents on the Google Patents platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
Based on our analysis of Figure 3, it is evident that bio-sensors have been increasingly utilized, as evidenced by their presence in about 23 patents. These sensors offer specific advantages in certain applications, making them an attractive option for many exoskeletons.
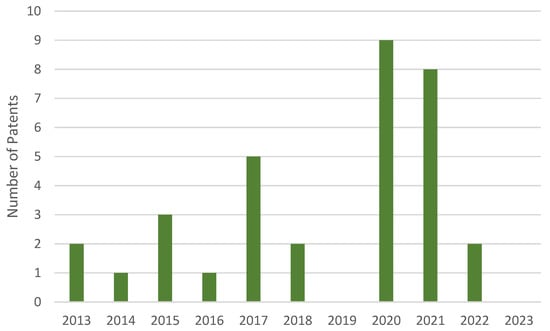
Figure 3.
Time distribution of patents that use bio-sensors on the Google Patents platform.
3.1.2. Patent-Scope Platform
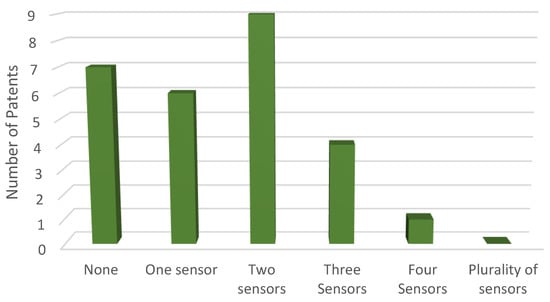
Figure 4.
Distribution of patents on the Patent-Scope platform, according to the number of sensors used.
Table 5.
The percentage distribution of patents on the Patent-Scope platform depended on the number of sensors used, where P represents the total number of patents.
In analyzing the Patent-Scope platform’s database, it was uncovered that around 70.36% of the exoskeletons possess at least one sensor, with a maximum of three sensors. Moreover, exoskeletons with more than four sensors, which are considered complex, account for an extremely low percentage of below 3.70%.
Table 6 presents the bibliographic references according to the type of sensor used. As in the case of the Google Patents platform, bibliographic references where sensors were not used or presented were removed.
Table 6.
Bibliographic references of sensors on the Patent-Scope platform, in alphabetical order.
Based on the data analysis carried out on Patent-Scope, pressure sensors are the most widely utilized type of sensors. As depicted in Figure 5, approximately 30% of patients have employed at least one pressure sensor, making it the most common category. The second most frequently encountered category was exoskeletons involving encoders, followed by bio-sensors.
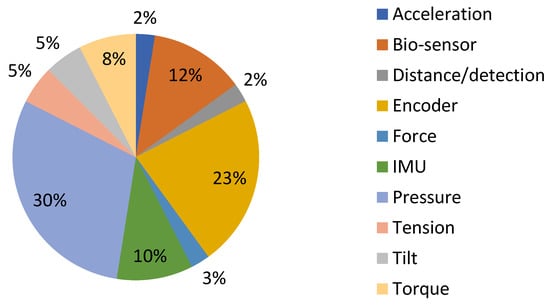
Figure 5.
Distribution of patents on the Patent-Scope patents platform, according to the type of sensors used.
The results of the pressure sensors and encoders on the Patent-Scope platform are presented in Table 7 and Table 8, respectively.
Table 7.
The distribution of the use of pressure sensors in the patents in the Patent-Scope platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
Table 8.
The distribution of the use of encoders in the patents on the Patent-Scope platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
After analyzing the Patent-Scope database, it was clear that only 1 out of 27 utilized force sensors, while 5 patents impressively incorporated bio-sensors into their design.
3.1.3. Lens Platform
The distribution of patents based on the number of sensors they utilize is illustrated in Figure 6.
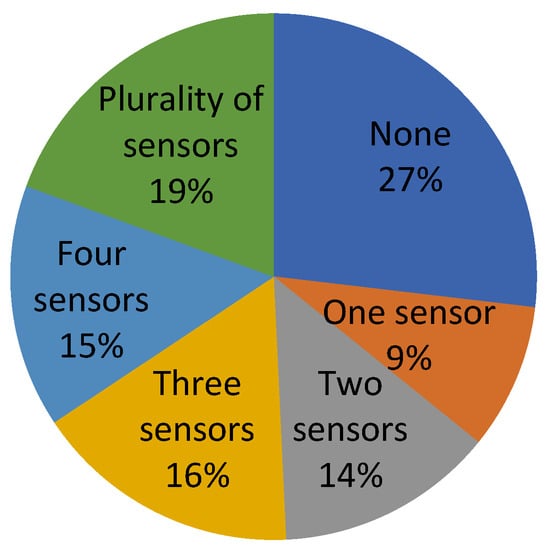
Figure 6.
Patents on the Lens platform, distributed according to the number of sensors used.
Table 9 presents the bibliographic references according to the type of sensor used. As in the case of the above platforms, bibliographic references where sensors were not used or given were removed. Figure 7 shows the distribution of patents according to the sensor type used.
Table 9.
Bibliographic references of sensors on the Lens platform, in alphabetical order.
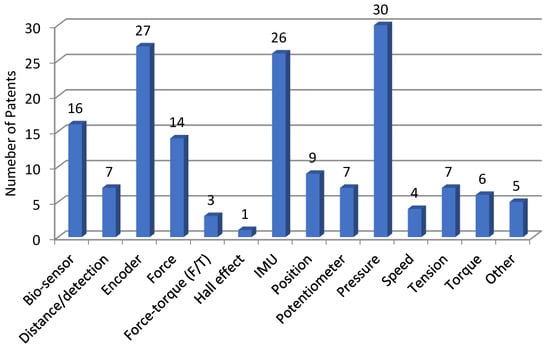
Figure 7.
Distribution of patents on the Lens Patents platform, depending on the type of sensors used.
The results of the pressure sensors, encoders, and force on the Lens platform are presented in Table 10, Table 11 and Table 12, respectively.
Table 10.
The distribution of pressure sensors in the patents on the Lens platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
Table 11.
The distribution of the use of encoders in the patents on the Lens platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
Table 12.
The distribution of the use of force sensors in the patents in the Lens platform, where P represents the total number of patents, and N is the number of patents that use the respective sensor.
3.2. Actuating System
The actuation system is a crucial component of achieving movement in exoskeletons. The proper selection of actuators depends on the anatomical joints of the human lower limb. Since certain joints, such as the ankle, have multiple degrees of freedom, independent actuators can only provide one. As a result, the type of actuation required is the deciding factor in selecting the appropriate actuator.
Evaluating the precision of a joint movement technique is crucial when selecting the appropriate method. Various methods, such as motor or servo-driven joints, pneumatic or hydraulic systems, and air muscles, can be used to move joints. Additionally, combining active and passive techniques, such as spring-based systems, may be advantageous. Finally, factors such as the required force, speed range, and available space influence the choice of technique. Rest assured that the optimal technique can be determined carefully considering these factors.
We have categorized the actuating systems into two groups: conventional (including mechanical, electric, hydraulic, and pneumatic) and unconventional (such as artificial muscle, serial elastic, and others). Furthermore, we have meticulously arranged a comprehensive and easy-to-use list of frequently utilized actuating systems for quick reference.
3.2.1. Google Patents Platform
Regarding the Google Patents platform, Figure 8 provides a detailed breakdown of the percentage of actuation systems used in the patents, including conventional and unconventional actuators.
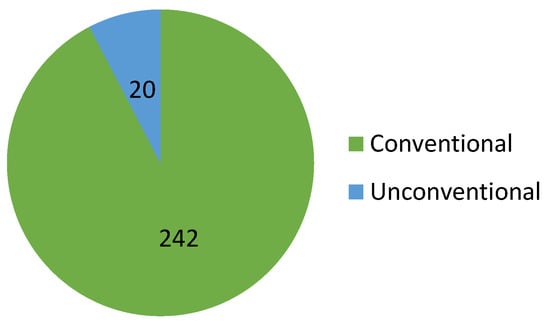
Figure 8.
The distribution of patents on the Google Patents platform, according to the types of actuators used.
It is important to note that when we say “any type of actuator”, we specifically refer to exoskeletons adaptable to various conventional actuation methods (Figure 9). Similarly, “combined actuators” means any possible combination of conventional actuators.
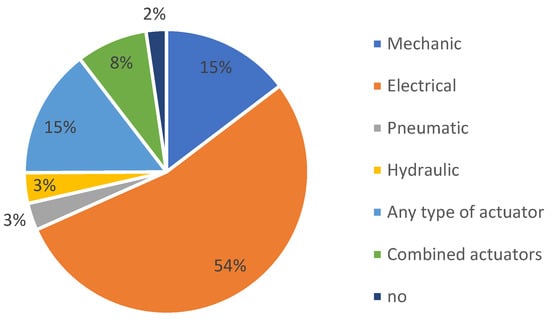
Figure 9.
The distribution of patents on the Google Patents platform, according to the types of conventional actuators used.
Figure 10 (Google Patents platform) shows the year-by-year representation of actuator types.
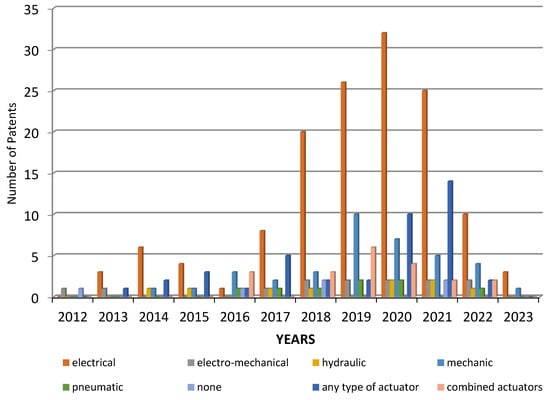
Figure 10.
Distribution of patents over time on the Google Patents platform, depending on the types of actuators used.
Table 13 presents the bibliographic references according to the type of actuating system used. Bibliographic references where actuating systems were not used or given were removed.
Table 13.
Bibliographic references by alphabetical types of actuating system on the Google Patents platform.
The distribution of electric-type actuators is clearly shown in Figure 11.
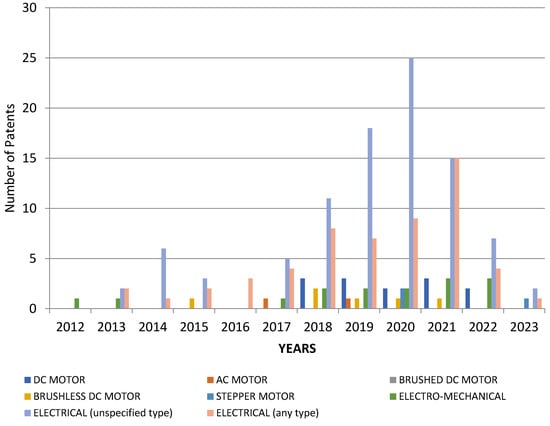
Figure 11.
Distribution of patents over time on the Google Patents platform, depending on the types of electric actuators used.
3.2.2. Patent-Scope Platform
Figure 12, regarding the Patent-Scope platform, provides a comprehensive evaluation of the actuator types used year by year.
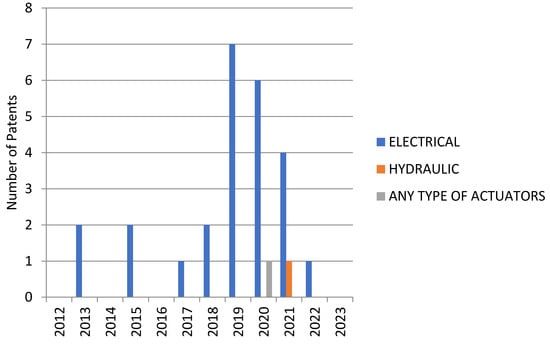
Figure 12.
The distribution of patents in time on the Patent-Scope platform, depending on the types of actuators used.
Table 14 presents the bibliographic references according to the type of actuating system used.
Table 14.
Bibliographic references of actuating systems on the Patent-Scope platform, in alphabetical order.
The distribution of electric-type actuators is clearly shown in Figure 13.
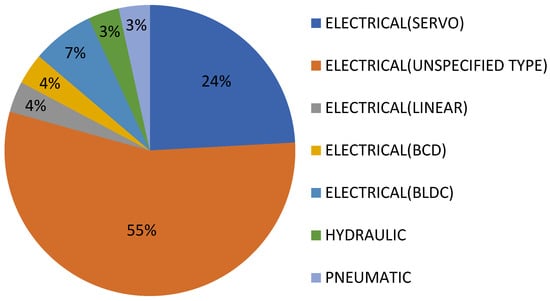
Figure 13.
Distribution of patents on the Patent-Scope platform, depending on the type of electric actuators used.
3.2.3. Lens Platform
Regarding the Lens platform, Figure 14 provides a detailed breakdown of the actuating systems used in the patents, including conventional and unconventional actuators.
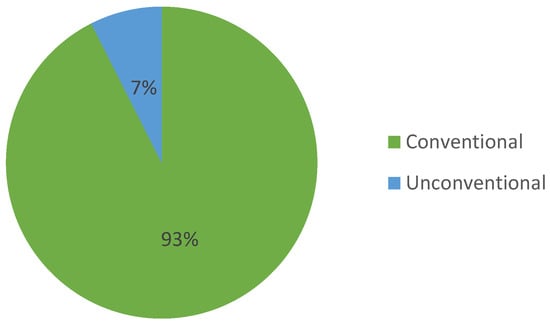
Figure 14.
The distribution of patents on the Lens platform, according to the types of actuators used.
Figure 15 provides a detailed breakdown of the percentage of the actuation systems used in the patents on the Lens platform.
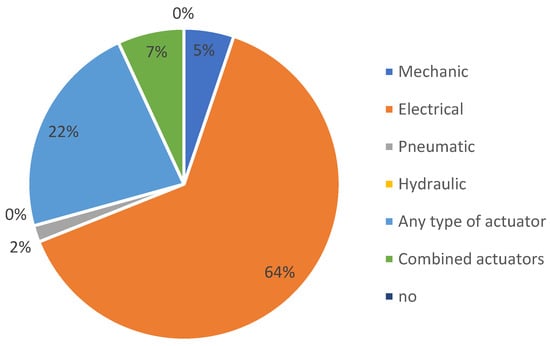
Figure 15.
The distribution of patents on the Lens platform, according to the types of conventional actuators used.
Table 15 presents the bibliographic references according to the type of actuating system used.
Table 15.
Bibliographic references of actuating systems on the Lens platform, in alphabetical order.
Figure 16 offers a comprehensive yearly evaluation of various actuator types on the Lens platform.
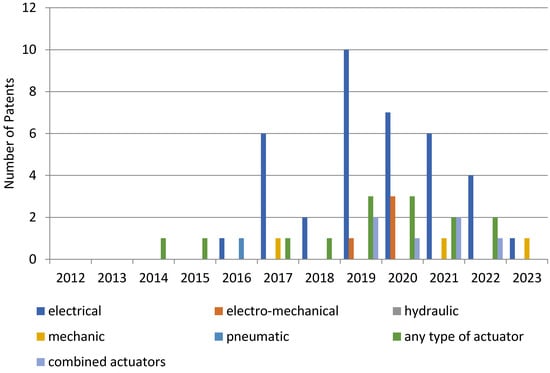
Figure 16.
The distribution of patents over time on the Lens platform, depending on the type of actuators used.
4. Discussion
Recovering the ability to walk after lower limb injuries requires considerable time and physical effort from specialized medical personnel, therapists, physiotherapists, and patients. In light of this, implementing robotic rehabilitation for the lower limbs is a significant advantage towards achieving this goal [402]. Robotic exoskeleton systems have proven extremely beneficial for patients with spinal cord injuries [403,404], stroke [20,405], cerebral palsy [406], traumatic brain injuries [407], Parkinson’s disease [408], multiple sclerosis [409], elderly care [410], postoperative care [411], and orthopedics [412].
The specialized literature presents a wide range of research and evaluations on lower limb exoskeletons specially designed for rehabilitation. Numerous studies have thoroughly scrutinized the exhibition of specific exoskeletons [413,414,415,416,417] or comprehensively analyzed published papers across diverse platforms [12,21,24,418,419,420,421,422].
Based on our study findings, we can draw dependable conclusions regarding the analysis results obtained from the three platforms.
In Figure 17, the data exhibit the number of sensors employed in the exoskeletons assessed on the three platforms. While certain patents did not mention or integrate sensors, it is apparent that the utilization of sensors was tailored to fit the particular requirements of the rehabilitation process. Notably, at least one sensor was deemed essential in overseeing the rehabilitation procedure, signifying that inventors integrated sensors only where necessary. Consequently, it can be deduced that using sensors was prioritized for optimal efficiency.
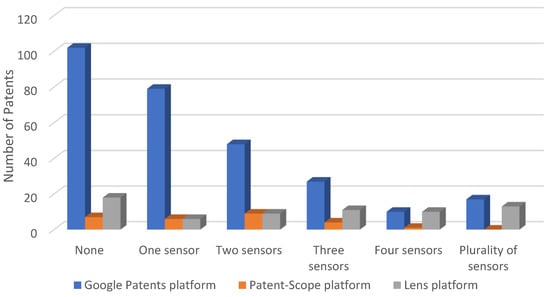
Figure 17.
Distribution of patents on the three platforms, depending on the number of sensors used.
The use of sensors in developing exoskeletons is a topic of great interest. Among the various types of sensors, foot plantar pressure sensors have gained much attention and have been extensively used in many patents analyzed across all three databases. This is especially true for patents on designing exoskeletons to aid gait rehabilitation. More detailed information on the distribution of patents, according to the pressure sensors used, can be seen in Figure 18.
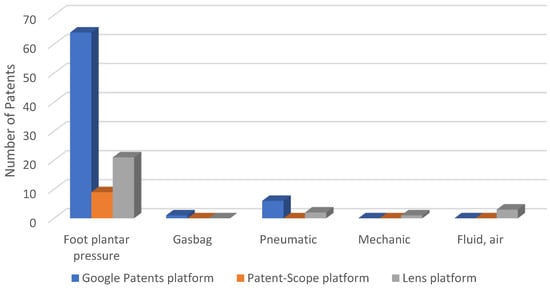
Figure 18.
Distribution of the patents, according to the number of pressure sensors used.
After analyzing data from three different platforms, we can confidently assert that the electric actuation system reigns supreme in creating exoskeletons. Our findings align with those published in the specialized literature on this subject. Electric motors have made considerable progress in recent years, with various sizes and performances now widely available. They are more cost-effective than other actuators and remarkably compact. Furthermore, controlling them has become a much simpler process. Moreover, according to the statistical analyses described in [21,24,422], it is indisputable that electric motors are the most used drive mechanism in the literature.
Our study confirms what was expected, that is, most of the lower limb rehabilitation robotic systems proposed by the authors of the analyzed patents are electrically operated due to easy energy storage and supply. The advantages of electric actuators are a great variety of types and sizes, a good control accuracy, a good reliability. The most used electric actuators are brushed and brushless DC motors.
An Important finding that cannot be ignored is that unconventional actuation techniques are not frequently utilized in patents (Figure 19). While unconventional actuation may be an option for some applications, it has its limitations, such as generating much smaller forces, which leads to instability in terms of the view of the kinematic/dynamic behavior that maintains the motion. Conventional actuation remains the preferred option, despite the low power-to-weight ratio and increasing gear sizes. This is due to its ability to generate higher forces and provide greater stability.
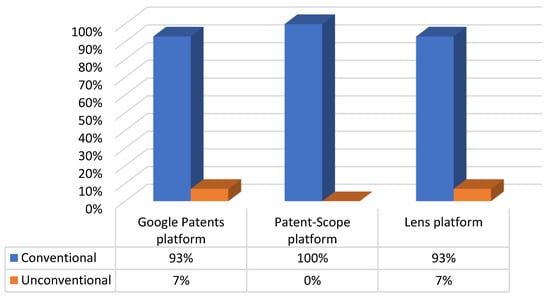
Figure 19.
Percentage distribution of patents, according to the type of actuation system used.
The authors of the patents have proposed different actuation systems for lower limb rehabilitation robotic systems. They have proposed electric, pneumatic, or hydraulic sources as a source of energy. Each of these systems comes with its own set of advantages and disadvantages. For the actuation of lower limb rehabilitation robotic systems, compared to the authors of the conference/journal papers, the authors of the analyzed patents have proposed unconventional actuators, such as shape memory alloys, electroactive polymers, and magneto-rheological fluids. Indeed, the number of these patents proposing unconventional actuators is very small.
According to a review conducted by Pamungkas et al. in [420], recent studies on prototype lower limb exoskeletons have revealed that certain exoskeletons feature actuated joints, while others utilize a combination of actuators that target multiple joints. While lower limb exoskeletons that mimic human biomechanics enable users to move more naturally, they tend to be more intricate and unwieldy. To reduce weight, some exoskeletons incorporate passive actuators instead of active ones, which comes at the cost of decreased controllability.
An intriguing observation can be made based on the results acquired from all three platforms. The years 2019 and 2020 saw the highest number of patent publications, with electric actuating systems predominating.
The actuation system has a fundamental role in the effectiveness of the rehabilitation robotic system because it influences the main functional characteristics of the system, for example, stability, control precision for the position, generated forces/torques, and safety. In addition, the chosen actuation system significantly influences the rehabilitation robotic system’s dimensions, weight, and rigidity.
We also analyzed the distribution of patents for different types of sensors based on the actuation system used in exoskeletons across each platform. Figure 20 shows the distribution of patents on Google Patents, Figure 21 on Patent-Scope, and Figure 22 on Lens. Figure 23 illustrates the overall distribution of patents based on the sensor and actuation type.
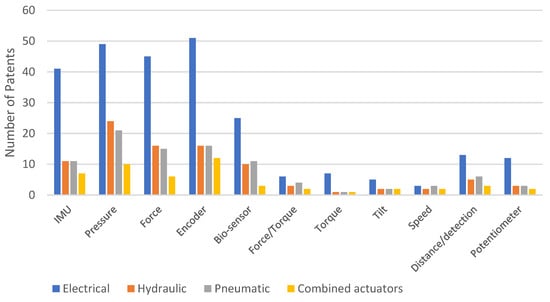
Figure 20.
Distribution of patents on the Google Patents platform, according to the types of sensors used and depending on the actuating system.
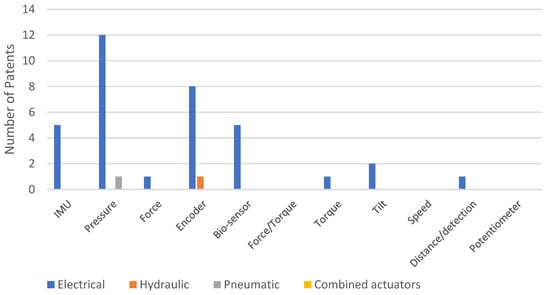
Figure 21.
Distribution of patents on the Patent-Scope platform, according to the types of sensors used and depending on the actuating system.
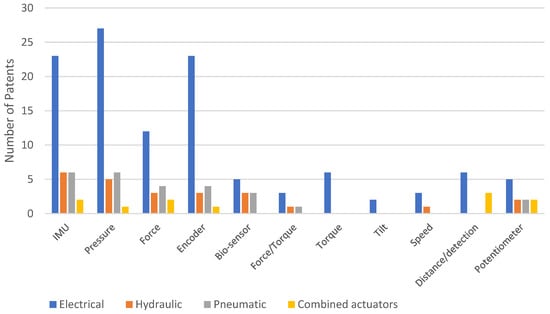
Figure 22.
Distribution of patents on the Lens platform, according to the types of sensors used and depending on the actuating system.
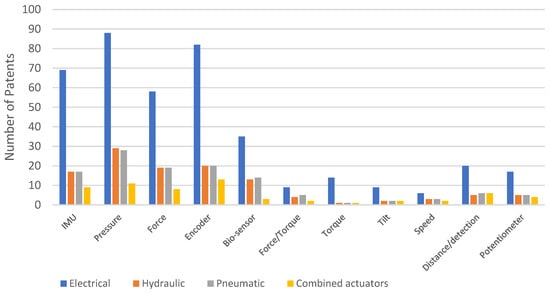
Figure 23.
Distribution of patents on all three platforms, according to the types of sensors used and depending on the actuating system.
Based on Figure 23, the sensors most frequently used for the four types of actuators, in hierarchical order, are pressure, encoders, IMU, force, and bio-sensors. However, when examining the platforms separately (as shown in Figure 20, Figure 21 and Figure 22), there are variations in this hierarchy. For instance, the order on the Google Patents platform is encoders, pressure, force, IMU, and bio-sensors, while the order is different on the other two platforms. On the Patent-Scope platform, the order is pressure, encoders, bio-sensors, IMU, and force, and on the Lens platform, the order is pressure, encoders and IMU (with the same number), force, and bio-sensors.
Cross-analyses were performed to highlight possible correlations between the actuation systems and the sensors used by the patent’s authors. Identifying these correlations can provide helpful information on the technology choices made for different types and uses of rehabilitation robotic systems for the lower limb and the outcomes achieved.
This review aimed to help researchers by making recommendations regarding sensors and actuation systems to be used in robotic systems to recover the lower limb by easily and quickly finding patents that use a specific sensor or actuation system. In Figure 24, we highlight the main advantages and disadvantages of the actuation systems (electrical, pneumatic, and hydraulic) and some characteristics of the main categories of sensors used according to their use percentage. We considered only the first five sensor categories (encoder, pressure, force, IMU, and bio-sensor). The other sensors follow with quite lower percentages. We also tried to make recommendations for using sensors (+++++, the most used; +, the least used) depending on the type of actuation system used.
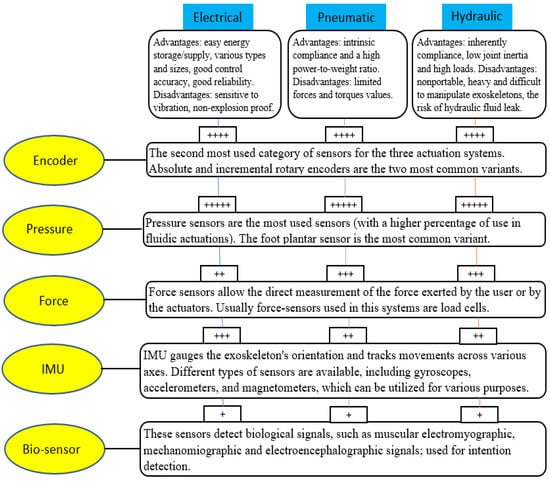
Figure 24.
Features of sensors and actuation systems and recommendations of use.
In multi-sensor systems, encoders, pressure sensors, force/torque sensors, and IMU and EMG sensors are usually used. By sensor fusion, a whole information acquisition system is created.
The sensors used for capturing the biomechanics of lower limb movements can be wearable or nonwearable by human subjects. Each type of sensor has its advantages and disadvantages. It is also important if the subject uses or does not use a rehabilitation robotic system.
An image processing-based system is one of the most used nonwearable sensor-based systems for motion capture, which is most suitable for gait analysis. For example, we used a VICON system (with 14 Vicon T10 video cameras) in a laboratory environment, which allowed for a video analysis of the subject’s movement, determining the parameters of interest of the movement of the lower limb. We obtained excellent results for each joint movement’s position, speed, and acceleration when the subject did not use a rehabilitation robotic system. When the subject/patient used a rehabilitation robotic system, it was more difficult to use an image processing-based system because the elements of the rehabilitation robotic system could cover some joints.
An advantage of wearable sensors is that they can be used indoors (in the laboratory) and in outdoor environments. IMU is the most commonly used wearable sensor (by human subjects) to measure human kinematics/kinetics. If we analyze the capturing of the biomechanics of lower limb movements when using the robotic rehabilitation systems with sensors of this system, then the most used sensors are encoders. EMG sensors are the most used noninvasive wearable sensors to evaluate muscle functions.
Limitations of this Study
Despite some limitations due to a lack of specific details on sensors and actuators in certain cases, this study thoroughly examined lower limb exoskeleton patents and produced results that align with the existing specialized literature and devices currently available. The collected data provide a comprehensive understanding of the subject matter.
5. Conclusions
This study thoroughly evaluated the sensors and actuators used in rehabilitation robotic technology for lower limb recovery by analyzing only patents published between January 2013 and March 2023. Compared to other reviews that have investigated book chapters, journals, and conference papers, our study examines patents, categorizing them according to different sensors or actuation systems used to show significant indications regarding the trends of research activity in this field.
Our results were obtained by examining the information from the three public patent databases (Google Patents, Patent-Scope, and Lens). The review was performed on 283 patents from Google Patents, 27 from Patent-Scope, and 67 from Lens. The patents were selected so that there were no duplicates after several filters.
The aim was to identify areas for improvement and highlight the benefits of integrating this advanced technology. Through this review, the authors want to help researchers by recommending sensors and actuation systems to be used in robotic systems to recover the lower limb by easily and quickly finding patents that use a specific sensor or actuation system.
A cross-analysis was conducted to find possible connections between the actuators and sensors utilized by the patent authors. This can help in determining the suitable technology options for various types and applications of lower limb rehabilitation robotic systems, as well as the results achieved.
The authors believe their research can provide valuable insights for scientists and researchers to develop next-generation systems that effectively address mobility challenges. The final goal of the work was to create an image of the main solutions of actuation systems and sensors used by the authors of the patents for rehabilitation robotic systems of the lower limb, as completely as possible.
The patent activity related to rehabilitation robotic systems for the lower limb, awarded from 2013 to 2023, was significant and addressed various topics and issues. Given the complexity of these systems and due to patient safety requirements, there are many design challenges still unsolved or for improvement. Some examples are the dimensions and portability of the rehabilitation robotic system, the control of this system to increase the efficiency of recovery, and the safety and comfort of the patient. In this context, the authors plan to investigate the control methods employed in patented rehabilitation robotic systems.
Author Contributions
Conceptualization, C.F.P., D.P. and V.M.R.; methodology, C.F.P.; validation, C.F.P., D.P. and V.M.R.; formal analysis, V.M.R.; investigation, C.F.P.; resources, C.F.P. and D.P.; data curation, C.F.P.; writing—original draft preparation, C.F.P., D.P. and V.M.R.; writing—review and editing, C.F.P., D.P. and V.M.R.; visualization, D.P.; supervision, C.F.P.; project administration, D.P.; funding acquisition, D.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Research, Development, and Innovation Plan III, Program 2: Increasing the competitiveness of the Romanian economy through RDI, Subprogram 2.1: Competitiveness through research, development, and innovation (PED), project number PN-III-P2-2.1-PED-2021-1917, contract number 610PED/2022.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This work was supported by a grant from the Ministry of Research, Innovation and Digitization, CCCDI—UEFISCDI, project number PN-III-P2-2.1-PED-2021-1917, within PNCDI III.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3. Available online: https://jneuroengrehab.biomedcentral.com/articles/10.1186/1743-0003-11-3 (accessed on 15 February 2023). [CrossRef] [PubMed]
- Blank, A.A.; French, J.A.; Pehlivan, A.U.; O’malley, M.K. Current Trends in Robot-Assisted Upper-Limb Stroke Rehabilitation: Promoting Patient Engagement in Therapy. Curr. Phys. Med. Rehabil. Rep. 2014, 2, 184–195. Available online: https://link.springer.com/article/10.1007/s40141-014-0056-z (accessed on 22 February 2023). [CrossRef]
- Babaiasl, M.; Mahdioun, S.H.; Jaryani, P.; Yazdani, M. A review of technological and clinical aspects of robot-aided rehabilitation of upper-extremity after stroke. Disabil. Rehabil. Assist. Technol. 2016, 11, 263–280. [Google Scholar] [CrossRef] [PubMed]
- Rehmat, N.; Zuo, J.; Meng, W.; Liu, Q.; Xie, S.Q.; Liang, H. Upper limb rehabilitation using robotic exoskeleton systems: A systematic review. Int. J. Intell. Robot. Appl. 2018, 2, 283–295. Available online: https://link.springer.com/article/10.1007/s41315-018-0064-8 (accessed on 28 February 2023). [CrossRef]
- Manna, S.K.; Dubey, V.N. Comparative study of actuation systems for portable upper limb exoskeletons. Med. Eng. Phys. 2018, 60, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Sanjuan, J.; Castillo, A.; Padilla, M.; Quintero, M.; Gutierrez, E.; Sampayo, I.; Hernandez, J.; Rahman, M. Cable driven exoskeleton for upper-limb rehabilitation: A design review. Robot. Auton. Syst. 2020, 126, 103445. [Google Scholar] [CrossRef]
- Sobiech, M.; Wolański, W.; Karpiel, I. Brief Overview Upper Limb Rehabilitation Robots/Devices. In Digital Interaction and Machine Intelligence; Biele, C., Kacprzyk, J., Kopeć, W., Owsiński, J.W., Romanowski, A., Sikorski, M., Eds.; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2022; Volume 440. [Google Scholar] [CrossRef]
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-Limb Robotic Rehabilitation: Literature Review and Challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef]
- Eiammanussakul, T.; Sangveraphunsiri, V. A Lower Limb Rehabilitation Robot in Sitting Position with a Review of Training Activities. J. Healthc. Eng. 2018, 2018, 1927807. [Google Scholar] [CrossRef]
- Carpino, G.; Pezzola, A.; Urbano, M.; Guglielmelli, E. Assessing Effectiveness and Costs in Robot-Mediated Lower Limbs Rehabilitation: A Meta-Analysis and State of the Art. J. Healthc. Eng. 2018, 2018, 7492024. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Villamañan, M.D.C.; Gonzalez-Vargas, J.; Torricelli, D.; Moreno, J.C.; Pons, J.L. Compliant lower limb exoskeletons: A comprehensive review on mechanical design principles. J. Neuroeng. Rehabil. 2019, 16, 55. [Google Scholar] [CrossRef] [PubMed]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef]
- Hobbs, B.; Artemiadis, P. A Review of Robot-Assisted Lower-Limb Stroke Therapy: Unexplored Paths and Future Directions in Gait Rehabilitation. Front. Neurorobot. 2020, 14, 19. [Google Scholar] [CrossRef] [PubMed]
- Chaichaowarat, R.; Nishimura, S.; Nozaki, T.; Krebs, H.I. Work in the Time of Covid-19: Actuators and Sensors for Rehabilitation Robotics. IEEJ J. Ind. Appl. 2021, 11, 256–265. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, S.; Xue, Q. Lower limb rehabilitation exoskeleton robot: A review. Adv. Mech. Eng. 2021, 13, 1–17. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, A.; Lobo-Prat, J.; Font-Llagunes, J.M. Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments. J. Neuroeng. Rehabil. 2021, 18, 22. [Google Scholar] [CrossRef]
- Hussain, F.; Goecke, R.; Mohammadian, M. Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2021, 235, 1375–1385. [Google Scholar] [CrossRef]
- Sarajchi, M.; Al-Hares, M.K.; Sirlantzis, K. Wearable Lower-Limb Exoskeleton for Children with Cerebral Palsy: A Systematic Review of Mechanical Design, Actuation Type, Control Strategy, and Clinical Evaluation. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 2695–2720. [Google Scholar] [CrossRef]
- Tiboni, M.; Borboni, A.; Vérité, F.; Bregoli, C.; Amici, C. Sensors and Actuation Technologies in Exoskeletons: A Review. Sensors 2022, 22, 884. [Google Scholar] [CrossRef]
- Sierra, S.D.; Arciniegas-Mayag, L.; Ramos, O.; Maldonado, J.; Múnera, M.; Cifuentes, C.A. Kinematics, Actuation, and Sens-ing Architectures for Rehabilitation and Assistive Robotics. In Interfacing Humans and Robots for Gait Assistance and Rehabilitation; Springer: Cham, Switzerland, 2022; pp. 43–92. [Google Scholar] [CrossRef]
- Neťuková, S.; Bejtic, M.; Malá, C.; Horáková, L.; Kutílek, P.; Kauler, J.; Krupička, R. Lower Limb Exoskeleton Sensors: State-of-the-Art. Sensors 2022, 22, 9091. [Google Scholar] [CrossRef] [PubMed]
- Massardi, S.; Rodriguez-Cianca, D.; Pinto-Fernandez, D.; Moreno, J.C.; Lancini, M.; Torricelli, D. Characterization and Evaluation of Human–Exoskeleton Interaction Dynamics: A Review. Sensors 2022, 22, 3993. [Google Scholar] [CrossRef] [PubMed]
- Mathew, M.; Thomas, M.J.; Navaneeth, M.; Sulaiman, S.; Amudhan, A.; Sudheer, A. A systematic review of technological advancements in signal sensing, actuation, control and training methods in robotic exoskeletons for rehabilitation. Ind. Robot. Int. J. Robot. Res. Appl. 2023, 50, 432–455. [Google Scholar] [CrossRef]
- US-9849048-B2, Mobility System Including an Exoskeleton Assembly Releasably Supported on a Wheeled Base. 26 December 2017. Available online: https://patents.google.com/patent/US9849048B2/en (accessed on 6 April 2023).
- US-8152699-B1, Apparatus and Method for Reduced-Gravity Simulation. 10 April 2012. Available online: https://patents.google.com/patent/US8152699B1/en (accessed on 20 April 2023).
- KR102493959B1, Assistive Devices That Support the Musculoskeletal System. 31 January 2023. Available online: https://patents.google.com/patent/KR102493959B1/en (accessed on 11 May 2023).
- CN217938640U, Allosteric Behavior Auxiliary Robot. 2 December 2022. Available online: https://patents.google.com/patent/CN217938640U/en (accessed on 11 May 2023).
- KR-101471856-B1, Active Type Step Assistance Apparatus. 12 December 2014. Available online: https://patents.google.com/patent/KR101471856B1/en (accessed on 4 April 2023).
- KR-102018436-B1, Ankle Assist Apparatus. 5 September 2019. Available online: https://patents.google.com/patent/KR102018436B1/en (accessed on 28 April 2023).
- KR-101911221-B1, Walking Pattern Training and Intension Analysis System through Complex Stimulus, and Method Thereof. 28 December 2018. Available online: https://patents.google.com/patent/KR101911221B1/en (accessed on 3 May 2023).
- JP-6879301-B2, Measurement System, Measurement Method, and Program. 2 June 2021. Available online: https://patents.google.com/patent/JP6879301B2/en (accessed on 11 May 2023).
- US-10561564-B2, Low Profile Exoskeleton. 18 February 2020. Available online: https://patents.google.com/patent/US10561564B2/en (accessed on 5 April 2023).
- CN-104869969-B, Soft Exterior Protector for Aiding in Human Motion. 9 June 2017. Available online: https://patents.google.com/patent/CN104869969B/en (accessed on 5 April 2023).
- ES-2575255-B1, Exo Skeleton for Human Movement Assistance. 6 April 2017. Available online: https://patents.google.com/patent/ES2575255B1/en (accessed on 6 April 2023).
- US-8419804-B2, Hybrid Terrain-Adaptive Lower-Extremity Systems. 16 April 2013. Available online: https://patents.google.com/patent/US8419804B2/en (accessed on 11 April 2023).
- CN-105213155-B, A Kind of Artificial Intelligence Motion’s Auxiliary Equipment. 29 March 2017. Available online: https://patents.google.com/patent/CN105213155B/en (accessed on 12 April 2023).
- EP-1843823-B1, Prosthetic and orthotic systems usable for rehabilitation. 26 October 2016. Available online: https://patents.google.com/patent/EP1843823B1/en (accessed on 13 April 2023).
- KR-20150055958-A, Wearable Robot and Method for Controlling the Same. 22 May 2015. Available online: https://patents.google.com/patent/KR20150055958A/en (accessed on 17 April 2023).
- US-20210346228-A1, Lower Limb Joint Motion Control Method Based on Wearable Walking Assisting Exoskeleton. 11 November 2021. Available online: https://patents.google.com/patent/US20210346228A1/en (accessed on 18 April 2023).
- KR-101511427-B1, A Treatment Device for Hemiplegia. 10 April 2015. Available online: https://patents.google.com/patent/KR101511427B1/en (accessed on 18 April 2023).
- KR-101226169-B1, Wearing Tool for Measuring Biological Signal, and Wearing-Type Motion Assisting Device. 24 January 2013. Available online: https://patents.google.com/patent/KR101226169B1/en (accessed on 18 April 2023).
- US-10864100-B2, Orthopedic Device Including Protruding Members. 15 December 2020. Available online: https://patents.google.com/patent/US10864100B2/en (accessed on 18 April 2023).
- US-10926123-B2, Systems and Methods for Assistive Exosuit System. 23 February 2021. Available online: https://patents.google.com/patent/US10926123B2/en (accessed on 19 April 2023).
- CA-2867484-C, Control System and Device for Patient Assist. 9 October 2018. Available online: https://patents.google.com/patent/CA2867484C/en (accessed on 20 April 2023).
- CN-101489732-B, Contact Displacement Actuator System. 28 January 2015. Available online: https://patents.google.com/patent/CN101489732B/en (accessed on 20 April 2023).
- EP-2497610-B1, System for Controlling a Robotic Device during Walking, in Particular for Rehabilitation Purposes, and Corresponding Robotic Device. 22 October 2014. Available online: https://patents.google.com/patent/EP2497610B1/en (accessed on 20 April 2023).
- KR-102334854-B1, Robot for Assisting User to Walk. 3 December 2021. Available online: https://patents.google.com/patent/KR102334854B1/en (accessed on 20 April 2023).
- CN-105919779-B, Semi-Automatic Bone Installations of Pulling Together. 9 March 2018. Available online: https://patents.google.com/patent/CN105919779B/en (accessed on 25 April 2023).
- CN-210277443-U, Flexible Body Harness. 10 April 2020. Available online: https://patents.google.com/patent/CN210277443U/en (accessed on 25 April 2023).
- JP-6742196-B2, Life Activity Detection Device and Life Activity Detection System. 19 August 2020. Available online: https://patents.google.com/patent/JP6742196B2/en (accessed on 26 April 2023).
- CN-110292506-B, Auxiliary Exercise System and Lower Limb Exoskeleton Control Method. 18 May 2021. Available online: https://patents.google.com/patent/CN110292506B/en (accessed on 26 April 2023).
- CN-105708587-B, A Kind of the Lower Limb Exoskeleton Training Method and System of the Triggering of mental Imagery Pattern Brain-Computer Interface. 3 November 2017. Available online: https://patents.google.com/patent/CN105708587B/en (accessed on 26 April 2023).
- US-10786371-B2, Technological Aid for Transfemoral Amputees. 29 September 2020. Available online: https://patents.google.com/patent/US10786371B2/en (accessed on 27 April 2023).
- US-11135120-B2, System and Device for Guiding and Detecting Motions of 3-DOF Rotational Target Joint. 5 October 2021. Available online: https://patents.google.com/patent/US11135120B2/en (accessed on 28 April 2023).
- KR-101556747-B1, Muscle Rehabilation Training Method Using Walking-Assistive Robot. 1 October 2015. Available online: https://patents.google.com/patent/KR101556747B1/en (accessed on 28 April 2023).
- US-10799381-B2, Tendon Device for Suit Type Robot for Assisting Human with Physical Strength. 13 October 2020. Available online: https://patents.google.com/patent/US10799381B2/en (accessed on 2 May 2023).
- US-10905877-B2, System and Method for the Regeneration of at Least One Severed Nerve Conduit. 2 February 2021. Available online: https://patents.google.com/patent/US10905877B2/en (accessed on 2 May 2023).
- US-11109778-B2, Walking Assistance Method and Apparatuses. 7 September 2021. Available online: https://patents.google.com/patent/US11109778B2/en (accessed on 2 May 2023).
- US-10694948-B2, Methods of Exoskeleton Communication and Control. 30 June 2020. Available online: https://patents.google.com/patent/US10694948B2/en (accessed on 2 May 2023).
- CA-3098479-C, Self-Supported Device for Guiding Motions of a Target Joint. 8 June 2021. Available online: https://patents.google.com/patent/CA3098479C/en (accessed on 5 May 2023).
- US-11192237-B2, Exosuit Systems and Methods. 7 December 2021. Available online: https://patents.google.com/patent/US11192237B2/en (accessed on 8 May 2023).
- CN-107661193-B, Walking-Aid Boots. 7 April 2020. Available online: https://patents.google.com/patent/CN107661193B/en (accessed on 10 May 2023).
- KR-102352537-B1, Walking Assistance System. 17 January 2022. Available online: https://patents.google.com/patent/KR102352537B1/en (accessed on 10 May 2023).
- US-20190029914-A1, Soft Inflatable Exosuit for Knee Rehabilitation. 31 January 2019. Available online: https://patents.google.com/patent/US11259980B2/en (accessed on 11 May 2023).
- JP-6035590-B2, Actuator Device, Humanoid Robot and Power Assist Device. 30 November 2016. Available online: https://patents.google.com/patent/JP6035590B2/en (accessed on 11 May 2023).
- US-10238318-B2, Treadmill Training Device Adapted to Provide Targeted Resistance to Leg Movement. 26 March 2019. Available online: https://patents.google.com/patent/US10238318B2/en (accessed on 13 April 2023).
- CN-107693314-B, Walking Stick Type Autonomous Falling Protection Rehabilitation Walking-Aid Robot. 14 July 2020. Available online: https://patents.google.com/patent/CN107693314B/en (accessed on 20 April 2023).
- US-9655805-B2, Walking Assist Robot and Control Method Thereof. 23 May 2017. Available online: https://patents.google.com/patent/US9655805B2/en (accessed on 24 April 2023).
- KR-101991588-B1, Walking Assistance Apparatus and Operation Method of the Same. 20 June 2019. Available online: https://patents.google.com/patent/KR101991588B1/en (accessed on 26 April 2023).
- EP-3524218-B1, Adaptive Assistive and/or Rehabilitative Device and System. 8 September 2021. Available online: https://patents.google.com/patent/EP3524218B1/en (accessed on 27 April 2023).
- KR-101981402-B1, Walking Assistance Apparatus and Operation Method of the Same. 28 August 2019. Available online: https://patents.google.com/patent/KR101981402B1/en (accessed on 4 May 2023).
- KR-101981403-B1, Walking Assistance Apparatus and Operation Method of the Same. 28 August 2019. Available online: https://patents.google.com/patent/KR101981403B1/en (accessed on 4 May 2023).
- EP-3539527-B1, Controlling Position of Wearable Assistive Device Depending on Operation Mode. 17 November 2021. Available online: https://patents.google.com/patent/EP3539527B1/en (accessed on 5 May 2023).
- CN-111920651-B, Exoskeleton Joint Self-Locking Mechanism, Knee Joint and Bionic Rehabilitation Robot. 5 February 2021. Available online: https://patents.google.com/patent/CN111920651B/en (accessed on 9 May 2023).
- JP-6845378-B2, Lower Limbs of the Exoskeleton with Low Power Consumption. 17 March 2021. Available online: https://patents.google.com/patent/JP6845378B2/en (accessed on 9 May 2023).
- US-10137050-B2, Gait Device with a Crutch. 27 November 2018. Available online: https://patents.google.com/patent/US10137050B2/en (accessed on 4 April 2023).
- CN -105105973-B, Wearable Power-Assisted Exoskeleton Lower Limb Mechanism. 22 March 2017. Available online: https://patents.google.com/patent/CN105105973B/en (accessed on 5 April 2023).
- CN-105263448-B, For Aiding in the Soft Machine Armour of Human Motion. 4 May 2018. Available online: https://patents.google.com/patent/CN105263448B/en (accessed on 5 April 2023).
- ES-2618285-B1, System to Assist Walk. 6 April 2018. Available online: https://patents.google.com/patent/ES2618285B1/en (accessed on 5 April 2023).
- CN-106264988-B, Exoskeleton Ankle Joint Machine Device. 27 December 2019. Available online: https://patents.google.com/patent/US20160331557A1/en (accessed on 5 April 2023).
- CN-107468487-B, Wearable Lower Limb Exoskeleton Driven by Lasso Artificial Muscles. 3 November 2020. Available online: https://patents.google.com/patent/CN107468487B/en (accessed on 6 April 2023).
- CN-108379038-B, A Kind of Lower Limb Rehabilitation Exoskeleton System and Its Walking Control Method. 9 July 2019. Available online: https://patents.google.com/patent/CN108379038B/en (accessed on 6 April 2023).
- JP-2019520230-A, Exo Skeleton and Proxy. 18 July 2019. Available online: https://patents.google.com/patent/JP2019520230A/en (accessed on 6 April 2023).
- US-9198821-B2, Lower Extremity Exoskeleton for Gait Retraining. 1 December 2015. Available online: https://patents.google.com/patent/US9198821B2/en (accessed on 10 April 2023).
- EP-2906172-B1, Robotic Device for Assistance and Rehabilitation of Lower Limbs. 21 December 2016. Available online: https://patents.google.com/patent/EP2906172B1/en (accessed on 11 April 2023).
- US-11191653-B2, Powered Lower Limb Devices and Methods of Control Thereof. 7 December 2021. Available online: https://patents.google.com/patent/US11191653B2/en (accessed on 12 April 2023).
- CN-109172289-B, Hip Joint Rehabilitation Exoskeleton Based on Multifunctional Driver and Motion Control Method Thereof. 23 February 2021. Available online: https://patents.google.com/patent/CN109172289B/en (accessed on 13 April 2023).
- CN-104936570-B, Interface for the Movement by Externally Applied Force Motivation of Adjustment Orthopedic Appliance. 9 October 2018. Available online: https://patents.google.com/patent/CN104936570B/en (accessed on 17 April 2023).
- US-9943459-B2, Method and Apparatus for Providing Deficit-Adjusted Adaptive Assistance during Movement Phases of an Impaired Joint. 17 April 2018. Available online: https://patents.google.com/patent/US9943459B2/en (accessed on 17 April 2023).
- CN-104869970-B, Reconfigurable Ectoskeleton. 29 September 2017. Available online: https://patents.google.com/patent/CN104869970B/en (accessed on 18 April 2023).
- US-8147436-B2, Powered Orthosis. 3 April 2012. Available online: https://patents.google.com/patent/US8147436B2/en (accessed on 18 April 2023).
- US-9597217-B2, Cable Driven Joint Actuator and Method. 21 March 2017. Available online: https://patents.google.com/patent/US9597217B2/en (accessed on 18 April 2023).
- EP-2583657-B1, Leg Support Device. 18 February 2015. Available online: https://patents.google.com/patent/EP2583657B1/en (accessed on 19 April 2023).
- ES-2491218-T3, Semi-Motorized Exoskeleton of the Lower Extremities. 5 September 2014. Available online: https://patents.google.com/patent/ES2491218T3/en (accessed on 20 April 2023).
- CN-107149539-B, Lower Limb Rehabilitation Walking-Aid Robot Supporting Omnidirectional Movement and Control Method. 24 March 2020. Available online: https://patents.google.com/patent/CN107149539B/en (accessed on 20 April 2023).
- ES-2886134-T3, Powered Orthopedic System for Cooperative Above-Ground Rehabilitation. 16 December 2021. Available online: https://patents.google.com/patent/ES2886134T3/en (accessed on 20 April 2023).
- CN-111805511-B, Lower Limb Exoskeleton System with Actively Adjustable Leg Rod Length and Control Method Thereof. 14 September 2021. Available online: https://patents.google.com/patent/CN111805511B/en (accessed on 24 April 2023).
- CN-109953761-B, Lower Limb Rehabilitation Robot Movement Intention Reasoning Method. 22 October 2021. Available online: https://patents.google.com/patent/CN109953761B/en (accessed on 24 April 2023).
- CN-107997929-B, Portable Ankle Joint Rehabilitation Robot Based on Active Intention Control. 1 September 2020. Available online: https://patents.google.com/patent/CN107997929B/en (accessed on 24 April 2023).
- US-8366591-B2, Reconfigurable Ankle Exoskeleton Device. 5 February 2013. Available online: https://patents.google.com/patent/US8366591B2/en (accessed on 25 April 2023).
- ES-2666382-T3, Active Orthosis for the Neurological Rehabilitation of the Movement of the Lower Limbs, a System Comprising Said Orthosis and a Process to Put Said System into Operation. 4 May 2018. Available online: https://patents.google.com/patent/ES2666382T3/en (accessed on 25 April 2023).
- CN-110812127-B, Lower Limb Exoskeleton Control Method and Device. 4 January 2022. Available online: https://patents.google.com/patent/CN110812127B/en (accessed on 25 April 2023).
- CN-109528453-B, Lower Limb Exoskeleton Heterogeneous Knee Joint Based on Parallel Elastomers. 15 June 2021. Available online: https://patents.google.com/patent/CN109528453B/en (accessed on 25 April 2023).
- EP-3643286-A1, Lower Limb Training Rehabilitation Apparatus. 29 April 2020. Available online: https://patents.google.com/patent/EP3643286A1/en (accessed on 26 April 2023).
- CN-111604890-B, Motion Control Method Suitable for Exoskeleton Robot. 25 May 2021. Available online: https://patents.google.com/patent/CN111604890B/en (accessed on 26 April 2023).
- CN-106580637-B, A Kind of Exoskeleton Robot. 28 December 2018. Available online: https://patents.google.com/patent/CN106580637B/en (accessed on 26 April 2023).
- CN-105326627-B, Convalescence Device Walking Trigger Control Method Based on Trunk Centre-of Gravity Shift. 13 April 2018. Available online: https://patents.google.com/patent/CN105326627B/en (accessed on 28 April 2023).
- CN-203662948-U, Ankle Treatment and Exoskeleton Measurement Device Not Making Contact with Ground, Capable of Being Worn and Capable of Being Reconstructed. 25 June 2014. Available online: https://patents.google.com/patent/CN203662948U/en (accessed on 28 April 2023).
- US-10300337-B2, Walking Training Apparatus and State Determination Method. 28 May 2019. Available online: https://patents.google.com/patent/US10300337B2/en (accessed on 28 April 2023).
- US-20190262214-A1, Method and System for Control and Operation of Motorized Orthotic Exoskeleton Joints. 29 August 2019. Available online: https://patents.google.com/patent/US20190262214A (accessed on 2 May 2023).
- EP-3539526-B1, Wearable Assistive Device Performing Protection Operation for Drive System. 10 November 2021. Available online: https://patents.google.com/patent/EP3539526B1/en (accessed on 2 May 2023).
- US-10626944-B2, Magneto-Rheological Series Elastic Actuator. 21 April 2020. Available online: https://patents.google.com/patent/US10626944B2/en (accessed on 2 May 2023).
- US-11034016-B2, Exoskeleton Device. 15 June 2021. Available online: https://patents.google.com/patent/US11034016B2/en (accessed on 3 May 2023).
- US-11090801-B2, Exoskeleton Device. 17 August 2021. Available online: https://patents.google.com/patent/US11090801B2/en (accessed on 3 May 2023).
- CN-111419652-B, Power-Source-Free Knee Joint Mechanism. 29 September 2020. Available online: https://patents.google.com/patent/CN111419652B/en (accessed on 3 May 2023).
- CN-105877973-B, A Kind of Hip Joint Structure of Wearable Exoskeleton Robot. 21 September 2018. Available online: https://patents.google.com/patent/CN105877973B/en (accessed on 3 May 2023).
- CN-105342808-B, The Walking Trigger Control Method of Convalescence Device Based on Foot Pressure Sensor. 15 May 2018. Available online: https://patents.google.com/patent/CN105342808B/en (accessed on 4 May 2023).
- EP-3360529-B1, Walking Training Apparatus and Method of Controlling the Same. 23 September 2020. Available online: https://patents.google.com/patent/EP3360529B1/en (accessed on 4 May 2023).
- CN-105287164-B, A Kind of Convalescence Device Speed of Travel Control Method Rocked Based on Trunk. 5 January 2018. Available online: https://patents.google.com/patent/CN105287164B/en (accessed on 4 May 2023).
- CN-106726357-B, Standing Mode Control Method of Exoskeleton Mechanical Leg Rehabilitation System. 22 September 2020. Available online: https://patents.google.com/patent/CN106726357B/en (accessed on 4 May 2023).
- CN-108175639-B, The Bionical Dynamic Knee Joint System in the Wearable List Source of One Kind and Its Control Method. 30 August 2019. Available online: https://patents.google.com/patent/CN108175639B/en (accessed on 4 May 2023).
- RU-2659132-C1, Modular Orthopedic Apparatus. 28 June 2018. Available online: https://patents.google.com/patent/RU2659132C1/en (accessed on 5 May 2023).
- EP-3750166-B1, Advanced Gait Control System and Methods Enabling Continuous Walking Motion of a Powered Exoskeleton Device. 5 January 2022. Available online: https://patents.google.com/patent/EP3750166B1/en (accessed on 8 May 2023).
- US-11077556-B2, Safety Monitoring and Control System and Methods for a Legged Mobility Exoskeleton Device. 3 August 2021. Available online: https://patents.google.com/patent/US11077556B2/en (accessed on 8 May 2023).
- ES-2663899-B2, System to Assist Walking. 11 September 2018. Available online: https://patents.google.com/patent/ES2663899B2/en (accessed on 8 May 2023).
- CN-109998860-B, Lower Limb Exoskeleton Robot with Overload Slipping Function. 8 October 2021. Available online: https://patents.google.com/patent/CN109998860B/en (accessed on 9 May 2023).
- KR-102020129-B1, Rehabilitation Walking Method Considering Patient’s Rom Characteristics and System Thereof. 9 September 2019. Available online: https://patents.google.com/patent/KR102020129B1/en (accessed on 9 May 2023).
- CN-107669447-B, Control Method of Hydraulic System of Knee Joint Rehabilitation Robot. 21 July 2020. Available online: https://patents.google.com/patent/CN107669447B/en (accessed on 10 May 2023).
- US-10290235-B2, Rehabilitation using a prosthetic device. 14 May 2019. Available online: https://patents.google.com/patent/US10290235B2/en (accessed on 4 April 2023).
- KR-101979938-B1, Robot for Assisting User to Walk. 20 May 2019. Available online: https://patents.google.com/patent/KR101979938B1/en (accessed on 5 April 2023).
- KR-101869968-B1, Robot for Assisting User to Walk with Lower Body Exoskeleton. 21 June 2018. Available online: https://patents.google.com/patent/KR101869968B1/en (accessed on 5 April 2023).
- JP-5906506-B1, Actuator Device, Power Assist Robot and Humanoid Robot. 20 April 2016. Available online: https://patents.google.com/patent/JP5906506B1/en (accessed on 12 April 2023).
- KR-102014162-B1, Monitoring System of Walking Balance for Lower Limb Rehabilitation. 26 August 2019. Available online: https://patents.google.com/patent/KR102014162B1/en (accessed on 12 April 2023).
- EP-2942044-B1, Forward or Rearward Oriented Exoskeleton. 19 January 2022. Available online: https://patents.google.com/patent/EP2942044B1/en (accessed on 13 April 2023).
- ES-2773853-T3, Movement Assist Device. 15 July 2020. Available online: https://patents.google.com/patent/ES2773853T3/en (accessed on 13 April 2023).
- CN-107708641-B, Sitting Type Walking Rehabilitation Robot. 12 January 2021. Available online: https://patents.google.com/patent/CN107708641B/en (accessed on 13 April 2023).
- KR-102119536-B1, Wearable Robot and Control Method Thereof. 05 June 2020. Available online: https://patents.google.com/patent/KR102119536B1/en (accessed on 13 April 2023).
- EP-3243606-B1, Ball Screw and Tensile Member Exoskeleton Joint Actuation Device. 16 February 2022. Available online: https://patents.google.com/patent/EP3243606B1/en (accessed on 17 April 2023).
- KR-101988644-B1, Robot for Assisting User to Walk. 12 June 2019. Available online: https://patents.google.com/patent/KR101988644B1/en (accessed on 18 April 2023).
- EP-2346447-B1, An Exoskeleton and Method for Controlling a Swing Leg of the Exoskeleton. 4 September 2019. Available online: https://patents.google.com/patent/EP2346447B1/en (accessed on 18 April 2023).
- KR-101979937-B1, Robot for Assisting User to Walk. 20 May 2019. Available online: https://patents.google.com/patent/KR101979937B1/en (accessed on 19 April 2023).
- ES-2549004-T3, Device and Method for Reducing a Person’s Oxygen Consumption during a Regular Walk by Using a Load-Bearing Exoskeleton. 22 October 2015. Available online: https://patents.google.com/patent/ES2549004T3/en (accessed on 19 April 2023).
- JP-6927912-B2, Walking Robot System that Regenerates Energy. 1 September 2021. Available online: https://patents.google.com/patent/JP6927912B2/en (accessed on 19 April 2023).
- US-8731716-B2, Control Logic for Biomimetic Joint Actuators. 20 May 2014. Available online: https://patents.google.com/patent/US8731716B2/en (accessed on 19 April 2023).
- CN-109223456-B, Lower Limb Exoskeleton Robot System Based on Man-Machine Terminal Interaction. 13 October 2020. Available online: https://patents.google.com/patent/CN109223456B/en (accessed on 20 April 2023).
- CN-106112985-B, Exoskeleton Hybrid Control System and Method for Lower Limb Walking Aid Machine. 22 May 2020. Available online: https://patents.google.com/patent/CN106112985B/en (accessed on 24 April 2023).
- CN-105596018-B, Human Motion Trend Detection Device and Detection Method Based on Force Sensor. 28 July 2020. Available online: https://patents.google.com/patent/CN105596018B/en (accessed on 27 April 2023).
- TW-I702977-B, Walking Rehabilitation Robot System. 1 September 2020. Available online: https://patents.google.com/patent/TWI702977B/en (accessed on 27 April 2023).
- CN-106236519-B, A Kind of Single Rope Towards Gait and Balance Rehabilitation Training Suspends Active Loss of Weight System in Midair. 10 July 2018. Available online: https://patents.google.com/patent/CN106236519B/en (accessed on 28 April 2023).
- KR-102146363-B1, Wearable Robot and Control Method for the Same. 20 August 2020. Available online: https://patents.google.com/patent/KR102146363B1/en (accessed on 28 April 2023).
- CN-110812130-B, Pelvic Auxiliary Walking Rehabilitation Training Robot. 9 November 2021. Available online: https://patents.google.com/patent/CN110812130B/en (accessed on 28 April 2023).
- KR-101828256-B1, Robot for Lower Limb with Multi-Link Type Knee Joint and Method for Controlling the Same. 13 February 2018. Available online: https://patents.google.com/patent/KR101828256B1/en (accessed on 3 May 2023).
- CN-109222984-B, Sole Human-Computer Interaction Measuring Device Based on Multi-Source Information Fusion. 6 July 2021. Available online: https://patents.google.com/patent/CN109222984B/en (accessed on 4 May 2023).
- KR-102067127-B1, Reaction Force Adjusting Device of Exoskeleton System and Variable Stiffness Actuator Using the Same. 16 January 2020. Available online: https://patents.google.com/patent/KR102067127B1/en (accessed on 8 May 2023).
- CN218484825U, Force Feedback System of Lower Limb Rehabilitation Exoskeleton. 17 February 2023. Available online: https://patents.google.com/patent/CN218484825U/en (accessed on 15 May 2023).
- US-20160346156-A1, Systems, Methods, and Devices for Assisting Walking for Developmentally Delayed Toddlers. 1 December 2016. Available online: https://patents.google.com/patent/US20160346156A1/en (accessed on 6 April 2023).
- US-8900167-B2, Passive Swing Assist Leg Exoskeleton. 2 December 2014. Available online: https://patents.google.com/patent/US8900167B2/en (accessed on 13 April 2023).
- US-10406059-B2, Human Movement Research, Therapeutic, and Diagnostic Devices, Methods, and Systems, 10 September 2019. Available online: https://patents.google.com/patent/US10406059B2/en (accessed on 13 April 2023).
- KR-101778025-B1, Legged Robotic Device Utilizing Modifiable Linkage Mechanism. 13 September 2017. Available online: https://patents.google.com/patent/KR101778025B1/en (accessed on 20 April 2023).
- ES-2858316-T3, Drive Device for Motorized Orthosis. 30 September 2021. Available online: https://patents.google.com/patent/ES2858316T3/en (accessed on 28 April 2023).
- CN114714334B, Hip Joint Exoskeleton Device. 6 September 2022. Available online: https://patents.google.com/patent/CN114714334B/en (accessed on 15 May 2023).
- KR-101955925-B1, Rehabilitation Robot of Legs, Boarding and Driving Method Thereof. 12 March 2019. Available online: https://patents.google.com/patent/KR101955925B1/en (accessed on 6 April 2023).
- KR-101774152-B1, Wearable Apparatus for Support Holding Posture. 4 September 2017. Available online: https://patents.google.com/patent/KR101774152B1/en (accessed on 6 April 2023).
- CN-105456004-B, Exoskeleton-Type Moves Walking Rehabilitation Training Device and Method. 1 February 2019. Available online: https://patents.google.com/patent/CN105456004B/en (accessed on 11 April 2023).
- JP-6948923-B2, How to Operate the Autonomous Motion Support Robot. 13 October 2021. Available online: https://patents.google.com/patent/JP6948923B2/en (accessed on 11 April 2023).
- US-10576008-B2, Methods of Enhancing the Rehabilitation or Training of an Exoskeleton Wearer. 3 March 2020. Available online: https://patents.google.com/patent/US10576008B2/en (accessed on 19 April 2023).
- CN-102088933-B, Device and Method for Decreasing Energy Consumption of a Person by Use of a Lower Extremity Exoskeleton. 18 March 2015. Available online: https://patents.google.com/patent/CN102088933B/en (accessed on 19 April 2023).
- CN-106334265-B, The Ectoskeleton Walk Help System Driven with Functional Muscle Electric Stimulation. 8 January 2019. Available online: https://patents.google.com/patent/CN106334265B/en (accessed on 27 April 2023).
- CN-112220650-B, Online Step Generation Control System for Exoskeleton Robot Contralateral Training. 16 April 2021. Available online: https://patents.google.com/patent/CN112220650B/en (accessed on 27 April 2023).
- CN-106377838-B, A Kind of Ectoskeleton Walk Help System Driven with Functional Muscle Electric Stimulation. 5 April 2019. Available online: https://patents.google.com/patent/CN106377838B/en (accessed on 3 May 2023).
- CN-109157381-B, Handrail Type Intelligent Tumble Protection Walking Aid Rehabilitation Robot. 4 August 2020. Available online: https://patents.google.com/patent/CN109157381B/en (accessed on 4 May 2023).
- CN-110353952-B, Anti-Falling Walking Aid Vehicle for Lower Limb Rehabilitation Training and Rehabilitation Training Method. 21 July 2020. Available online: https://patents.google.com/patent/CN110353952B/en (accessed on 9 May 2023).
- KR-102288425-B1, Wearable Suit Control Method. 10 August 2021. Available online: https://patents.google.com/patent/KR102288425B1/en (accessed on 10 May 2023).
- KR-101497673-B1, Two-Leg Walking Assistant System for Boarding Type. 3 March 2015. Available online: https://patents.google.com/patent/KR101497673B1/en (accessed on 10 May 2023).
- CN-105899177-B, Walking Aid. 11 September 2020. Available online: https://patents.google.com/patent/CN105899177B/en (accessed on 17 April 2023).
- US-8888723-B2, Gait Rehabilitation Methods and Apparatuses. 18 November 2014. Available online: https://patents.google.com/patent/US8888723B2/en (accessed on 18 April 2023).
- US-10315067-B2, Natural Assist Simulated Gait Adjustment Therapy System. 11 June 2019. Available online: https://patents.google.com/patent/US10315067B2/en (accessed on 4 April 2023).
- CN-109044742-B, Rehabilitation Type Lower Limb Exoskeleton. 13 March 2020. Available online: https://patents.google.com/patent/CN109044742B/en (accessed on 5 April 2023).
- CN-108392378-B, Lower Limb Rehabilitation Training Exoskeleton System and Its Walking Control Method and Hip Joint Structure. 20 September 2019. Available online: https://patents.google.com/patent/CN108392378B/en (accessed on 10 April 2023).
- KR-101275030-B1, Training System for Leg Rehabilatation Having Saparated Treadmill. 17 June 2013. Available online: https://patents.google.com/patent/KR101275030B1/en (accessed on 10 April 2023).
- CN-107260483-B, A Kind of Link-Type Lower Limb Exoskeleton Rehabilitation Robot. 26 June 2018. Available online: https://patents.google.com/patent/CN107260483B/en (accessed on 17 April 2023).
- CN-107126348-B, A Kind of Quasi-Passive Knee Ankle-Joint Coupling Lower Limb Exoskeleton and Its Control Method. 18 June 2019. Available online: https://patents.google.com/patent/CN107126348B/en (accessed on 17 April 2023).
- CN-105796286-B, Use the Lower Limb Exoskeleton Robot Control Method of Air Bag Sensor. 6 April 2018. Available online: https://patents.google.com/patent/CN105796286B/en (accessed on 20 April 2023).
- CN-105686930-B, A Kind of Link Joint Integrated Hydraulic Driving Ectoskeleton. 20 November 2018. Available online: https://patents.google.com/patent/CN105686930B/en (accessed on 24 April 2023).
- KR-101171225-B1, Sensor System for a User’s Intention Following and Walk Supporting Robot. 6 August 2012. Available online: https://patents.google.com/patent/KR101171225B1/en (accessed on 24 April 2023).
- CN-106420279-B, A kind of Wearable Flexible Knee Joint Robotic Exoskeleton Equipment Based on Gait. 9 April 2019. Available online: https://patents.google.com/patent/CN106420279B/en (accessed on 24 April 2023).
- CN-106137687-B, A Kind of Lower Limb Exoskeleton Robot. 5 September 2017. Available online: https://patents.google.com/patent/CN106137687B/en (accessed on 26 April 2023).
- CN-109464264-B, Human Lower Limb Assisting Device. 18 September 2020. Available online: https://patents.google.com/patent/CN109464264B/en (accessed on 26 April 2023).
- KR-101814676-B1, Wearable Soft Exoskeleton Apparatus. 4 January 2018. Available online: https://patents.google.com/patent/KR101814676B1/en (accessed on 28 April 2023).
- KR-101648270-B1, Shoe Module for Detecting Walking Phase, Method, Gait Analysis System and Active Walking Assist Device Using the Same. 16 August 2016. Available online: https://patents.google.com/patent/KR101648270B1/en (accessed on 28 April 2023).
- CN-111358667-B, Method for Controlling Man-Machine Interactive Motion of Lower Limb Exoskeleton Based on Joint Stress. 11 February 2022. Available online: https://patents.google.com/patent/CN111358667B/en (accessed on 28 April 2023).
- CN-110385692-B, Pneumatic Waist Assistance Exoskeleton Robot. 8 September 2020. Available online: https://patents.google.com/patent/CN110385692B/en (accessed on 2 May 2023).
- CN-105662419-B, A Kind of Plantar Pressure Measuring Device and Method for Ectoskeleton Control. 12 October 2018. Available online: https://patents.google.com/patent/CN105662419B/en (accessed on 3 May 2023).
- CN-109276415-B, Control Method of Lower Limb Exoskeleton Robot. 22 December 2020. Available online: https://patents.google.com/patent/CN109276415B/en (accessed on 4 May 2023).
- KR-101619297-B1, Elastic Type Sole Assembly in Wearable Robot Absorbing Impact and Detecting Ground Reaction Force. 10 May 2016. Available online: https://patents.google.com/patent/KR101619297B1/en (accessed on 8 May 2023).
- CN-108670731-B, Electro-Hydraulic Hybrid Driving Exoskeleton Device. 7 April 2020. Available online: https://patents.google.com/patent/CN108670731B/en (accessed on 8 May 2023).
- CN-109124999-B, Pneumatic Weight-Reducing Walking Power-Assisted Robot. 16 June 2020. Available online: https://patents.google.com/patent/CN109124999B/en (accessed on 8 May 2023).
- CN-113181009-B, Novel Self-Balancing Ectoskeleton Robot. 1 February 2022. Available online: https://patents.google.com/patent/CN113181009B/en (accessed on 9 May 2023).
- CN217572885U, Lower Limb Carrying Assistance Exoskeleton Robot Based on Hydraulic Drive. 14 October 2022. Available online: https://patents.google.com/patent/CN217572885U/en (accessed on 15 May 2023).
- CN-108606907-B, Movable Parallel Flexible Cable Driven Lower Limb Rehabilitation Robot and Implementation Method Thereof. 18 February 2020. Available online: https://patents.google.com/patent/CN108606907B/en (accessed on 11 April 2023).
- CN-110652425-B, Variable-Rigidity Lower Limb Exoskeleton Power-Assisted Robot. 17 December 2021. Available online: https://patents.google.com/patent/CN110652425B/en (accessed on 24 April 2023).
- KR-101368817-B1, Walk Assist Apparatus. 3 March 2014. Available online: https://patents.google.com/patent/KR101368817B1/en (accessed on 4 April 2023).
- KR-102067124-B1, Reaction Force Adjusting Device and Method Using Variable Stiffness Actuator of Exoskeleton System. 16 January 2020. Available online: https://patents.google.com/patent/KR102067124B1/en (accessed on 8 May 2023).
- US-10617906-B2, Patient Aid Devices, Particularly for Mobile Upper Extremity Support in Railed Devices Such as Parallel Bars and Treadmills. 14 April 2020. Available online: https://patents.google.com/patent/US10617906B2/en (accessed on 4 April 2023).
- KR-102156837-B1, Variable-Rigidity Knee Joint Exoskeleton Robot Based on Shape Memory Alloy. 14 January 2022. Available online: https://patents.google.com/patent/CN111823218B/en (accessed on 10 May 2023).
- CN112472531, Lower Limb Exoskeleton Robot Gait Stabilization Algorithm for Medical Rehabilitation and Assisted Walking. 12 March 2021. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN320941869&_cid=P21-LGB7EB-96710-3 (accessed on 16 May 2023).
- CN107874981, Wearable Exoskeleton Type Lower Limb Walking Training Rehabilitation Robot. 6 April 2018. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN214586242&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN109568089, Slave-Type Lower Limb Gait Training Rehabilitation Robot System. 5 April 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN241296998&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN210205291, Follow-Up Lower Limb Gait Training Rehabilitation Robot System. 31 March 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN293217412&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN111631923, Neural Network Control System of Exoskeleton Robot Based on Intention Recognition. 8 September 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN306327021&_cid=P21-LGB7EB-96710-3 (accessed on 16 May 2023).
- CN112089577, Interactive Training Exoskeleton Robot Based on Surface Myoelectricity and Functional Electrical Stimulation. 18 December 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN314079325&_cid=P21-LGB7EB-96710-3 (accessed on 16 May 2023).
- CN109875842, Lower Limb Assisted Exoskeleton Robot Control System. 14 June 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN245680227&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN104490568, Human Lower Extremity Exoskeleton Walking Aid Rehabilitation Robot. 8 April 2015. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN132810412&_cid=P21-LGB76G-92822-1 (accessed on 15 May 2023).
- CN107126344, Exoskeleton Rehabilitation Robot for Rehabilitation of Lower Limb Walking Function and Control System and Method Thereof. 5 September 2017. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN204802797&_cid=P21-LGB7EB-96710-1 (accessed on 15 May 2023).
- CN109771214, Gait Training Rehabilitation Robot. 21 May 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN243472474&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN110074949, Lower Extremity Exoskeleton Robot and Application Method. 2 August 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN250416798&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN110974631, Asymmetric Lower Limb Exoskeleton Robot and Control Method. 10 April 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN294002450&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN210447545, Lower Limb Exoskeleton Robot. 5 May 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN295108781&_cid=P21-LGB7EB-96710-3 (accessed on 16 May 2023).
- CN210472561, Joint Structure for Lower Limb Exoskeleton Robot. 8 May 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN295374587&_cid=P21-LGB7EB-96710-3 (accessed on 16 May 2023).
- CN112603759, Exoskeleton Robot for Lower Limb Paraplegia Patient. 6 April 2021. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN322137363&_cid=P21-LGB7EB-96710-3 (accessed on 17 May 2023).
- CN113230094, Single-Leg Exoskeleton Robot and Control Method Thereof. 10 August 2021. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN333957877&_cid=P21-LGB7EB-96710-4 (accessed on 17 May 2023).
- CN110522457, Real-Time Gait Analysis Method Based on Motor Current and Sensor Feedback. 3 December 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN279522836&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN112220650, Online Gait Generation Control System for Exoskeleton Robot Opposite Side Training. 15 January 2021. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN317076624&_cid=P21-LGB7EB-96710-3 (accessed on 16 May 2023).
- US20200100977, Lower Limb Training Rehabilitation Apparatus. 2 April 2020. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=US291926515&_fid=CN220639983 (accessed on 15 May 2023).
- CN113558886, Wheelchair Type Walking Assist Device. 29 October 2021. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN341246006&_cid=P21-LGB7EB-96710-4 (accessed on 17 May 2023).
- US 10792210 B2, Movement Assistance Devices. 20 June 2017. Available online: https://lens.org/025-386-529-449-943 (accessed on 17 May 2023).
- US 10434027 B2, Recognition Method of Human Walking Speed Intention from Surface Electromyogram Signals of Plantar Flexor and Walking Speed Control Method of a Lower-Limb Exoskeleton Robot. 8 October 2019. Available online: https://lens.org/079-429-467-660-693 (accessed on 18 May 2023).
- US 9498401 B2, Robotic System for Simulating a Wearable Device and Method of Use. 22 November 2016. Available online: https://lens.org/129-557-246-973-440 (accessed on 18 May 2023).
- US 10406059 B2, Human Movement Research, Therapeutic, and Diagnostic Devices, Methods, and Systems. 10 September 2019. Available online: https://lens.org/147-343-147-734-128 (accessed on 18 May 2023).
- US 11259980 B2, Soft Inflatable Exosuit for Knee Rehabilitation. 1 March 2022. Available online: https://lens.org/105-133-640-235-251 (accessed on 19 May 2023).
- EP 3378446 B1, System for Assisting Walking. 4 November 2020. Available online: https://lens.org/006-100-037-471-962 (accessed on 19 May 2023).
- US 10561563 B2, Optimal Design of a Lower Limb Exoskeleton or Orthosis. 18 February 2020. Available online: https://lens.org/158-268-134-096-341 (accessed on 19 May 2023).
- US 10537283 B1, Methods, Apparatuses and Systems for Amputee Gait Capacity Assessment. 21 January 2020. Available online: https://lens.org/180-028-878-408-47X (accessed on 22 May 2023).
- US 10843332 B2, Soft Exosuit for Assistance with Human Motion. 24 November 2020. Available online: https://lens.org/085-436-666-828-519 (accessed on 22 May 2023).
- US 10556335 B2, Wearable Robot and Method for Controlling the Same. 11 February 2020. Available online: https://lens.org/118-646-163-749-684 (accessed on 23 May 2023).
- US 9545353 B2, Methods of Operating an Exoskeleton for Gait Assistance and Rehabilitation. 17 January 2017. Available online: https://lens.org/191-647-518-893-709 (accessed on 23 May 2023).
- EP 3133998 B1, Human Movement Research, Therapeutic, and Diagnostic Devices, Methods, and Systems. 3 July 2019. Available online: https://lens.org/196-858-197-378-467 (accessed on 24 May 2023).
- US 10532000 B1, Integrated Platform to Monitor and Analyze Individual Progress in Physical and Cognitive Tasks. 14 January 2020. Available online: https://lens.org/170-652-962-236-195 (accessed on 24 May 2023).
- EP 3402444 B1, System and Device for Guiding and Detecting Motions of 3-Dof Rotational Target Joint. 6 April 2022. Available online: https://lens.org/102-232-676-546-582 (accessed on 25 May 2023).
- US 11179251 B2, Method and System for Providing Proprioceptive Feedback and Functionality Mitigating Limb Pathology. 23 November 2021. Available online: https://lens.org/188-384-612-428-993 (accessed on 25 May 2023).
- US 11135122 B2, Self-Supported Device for Guiding Motions of a Passive Target System. 5 October 2021. Available online: https://lens.org/043-537-778-105-357 (accessed on 25 May 2023).
- US 9801772 B2, Human Machine Interfaces for Lower Extremity Orthotics. 31 October 2017. Available online: https://lens.org/162-886-657-127-285 (accessed on 17 May 2023).
- US 10492977 B2, Apparatus and System for Limb Rehabilitation. 3 December 2019. Available online: https://lens.org/105-401-703-507-268 (accessed on 17 May 2023).
- US 9789023 B1, Multi-Function Lower Limb Ambulation Rehabilitation and Walking Assist Device. 17 October 2017. Available online: https://lens.org/026-402-980-207-651 (accessed on 17 May 2023).
- US 10285828 B2, Implementing a Stand-Up Sequence Using a Lower-Extremity Prosthesis or Orthosis. 14 May 2019. Available online: https://lens.org/156-334-395-976-013 (accessed on 18 May 2023).
- US 10278883 B2, Systems, Methods, and Devices for Assisting Walking for Developmentally-Delayed Toddlers. 7 May 2019. Available online: https://lens.org/035-088-029-865-462 (accessed on 23 May 2023).
- US 8679040 B2, Intention-Based Therapy Device and Method. 25 March 2014. Available online: https://lens.org/117-221-971-388-856 (accessed on 24 May 2023).
- US 10292892 B2, Pneumatic Lower Extremity Gait Rehabilitation Training System. 21 May 2019. Available online: https://lens.org/091-575-650-229-690 (accessed on 17 May 2023).
- US 10426637 B2, Exoskeleton Ankle Robot. 1 October 2019. Available online: https://lens.org/044-718-156-869-415 (accessed on 17 May 2023).
- EP 2931204 B1, Reconfigurable Exoskeleton. 3 April 2019. Available online: https://lens.org/034-108-386-050-041 (accessed on 17 May 2023).
- US 10390973 B2, Interactive Exoskeleton Robotic Knee System. 27 August 2019. Available online: https://lens.org/016-590-908-661-532 (accessed on 18 May 2023).
- EP 3522847 B1, Modular and Minimally Constraining Lower Limb Exoskeleton for Enhanced Mobility and Balance Augmentation. 13 April 2022. Available online: https://lens.org/193-277-385-457-109 (accessed on 18 May 2023).
- EP 3079581 B1, Assistive Flexible Suits, Flexible Suit Systems, and Methods for Making and Controassistive Flexible Suits, Flexible Suit Systems, and Methods for Making and Control Thereof to Assist Human Mobility. 16 March 2022. Available online: https://lens.org/053-425-184-396-253 (accessed on 19 May 2023).
- US 11337622 B2, Method and Apparatus for Providing Economical, Portable Deficit-Adjusted Adaptive Assistance during Movement Phases of an Impaired Ankle. 24 May 2022. Available online: https://lens.org/024-149-971-228-566 (accessed on 19 May 2023).
- US 9682005 B2, Elastic Element Exoskeleton and Method of Using Same. 20 June 2017. Available online: https://lens.org/167-921-232-127-215 (accessed on 22 May 2023).
- US 9480618 B2, Portable Active Pneumatically Powered Ankle-Foot Orthosis. 1 November 2016. Available online: https://lens.org/137-971-064-369-502 (accessed on 23 May 2023).
- US 10278885 B1, Method and System for Control and Operation of Motorized Orthotic Exoskeleton Joints. 7 May 2019. Available online: https://lens.org/050-047-039-258-431 (accessed on 24 May 2023).
- EP 2854939 B1, Apparatus for Restoring Voluntary Control of Locomotion in Neuromotor Impairments. 19 April 2017. Available online: https://lens.org/194-337-122-143-907 (accessed on 24 May 2023).
- US 9662262 B2, Joint Torque Augmentation System and Method for Gait Assistance. 30 May 2017. Available online: https://lens.org/058-807-780-397-813 (accessed on 25 May 2023).
- EP 3173191 B1, Method for Estimating Posture of Robotic Walking Aid. 17 March 2021. Available online: https://lens.org/101-475-813-013-556 (accessed on 25 May 2023).
- EP 3609455 B1, Actuating Device for Powered Orthosis. 24 February 2021. Available online: https://lens.org/101-920-177-269-667 (accessed on 25 May 2023).
- US 8945028 B2, Device and Method for Decreasing Energy Consumption of a Person by Use of a Lower Extremity Exoskeleton. 3 February 2015. Available online: https://lens.org/116-994-630-636-389 (accessed on 18 May 2023).
- US 10512583 B2, Forward or Rearward Oriented Exoskeleton. 24 December 2019. Available online: https://lens.org/169-236-701-117-915 (accessed on 22 May 2023).
- US 10766133 B2, Legged Robotic Device Utilizing Modifiable Linkage Mechanism. 8 September 2020. Available online: https://lens.org/130-818-584-633-113 (accessed on 24 May 2023).
- US 10201437 B2, Wearable Robot and Control Method Thereof. 12 February 2019. Available online: https://lens.org/153-448-172-180-137 (accessed on 18 May 2023).
- US 11298285 B2, Ankle Exoskeleton System and Method for Assisted Mobility and Rehabilitation. 12 April 2022. Available online: https://lens.org/172-260-957-082-216 (accessed on 19 May 2023).
- US 11590048 B2, Method and Device for Controlling Walking Assist Device. 28 February 2023. Available online: https://lens.org/109-876-950-519-316 (accessed on 22 May 2023).
- EP 3524220 B1, Adaptive Assistive and/or Rehabilitative Device and System. 31 March 2021. Available online: https://lens.org/036-239-440-306-718 (accessed on 24 May 2023).
- EP 2825146 B1, Active Orthosis for the Motion Neurological Rehabilitation of Lower Limbs, System Comprising Such Orthosis and Process for Operating Such System. 28 March 2018. Available online: https://lens.org/165-398-716-660-562 (accessed on 18 May 2023).
- US 11278465 B2, Modular Exoskeleton for Example for Spinal Cord Injured Patients. 22 March 2022. Available online: https://lens.org/122-094-640-086-062 (accessed on 23 May 2023).
- US 11166866 B2, Lower Limb Training Rehabilitation Apparatus. 9 November 2021. Available online: https://lens.org/020-267-456-916-593 (accessed on 18 May 2023).
- US 10537987 B2, Control System for a Mobility Aid. 21 January 2020. Available online: https://lens.org/187-121-526-161-910 (accessed on 23 May 2023).
- EP 3238686 B1, Walking Training Apparatus and State Determination Method. 30 September 2020. Available online: https://lens.org/026-171-476-158-568 (accessed on 24 May 2023).
- EP 3196484 B1, Actuator Device, Power Assist Robot, and Humanoid Robot. 3 July 2019. Available online: https://lens.org/089-925-600-773-79X (accessed on 25 May 2023).
- CN-108542718-B, A Kind of Wearable Flexible Lower Limb Exoskeleton Based on Negative Pressure Rotary Pneumatic Artificial-Muscle. 26 July 2019. Available online: https://patents.google.com/patent/CN108542718B/en (accessed on 25 April 2023).
- CN-107811805-B, Wearable Lower Limb Exoskeleton Rehabilitation Robot. 21 February 2020. Available online: https://patents.google.com/patent/CN107811805B/en (accessed on 10 April 2023).
- CN-106109186-B, Wearable Lower Limb Exoskeleton Robot. 14 August 2018. Available online: https://patents.google.com/patent/CN106109186B/en (accessed on 11 April 2023).
- US-10105839-B2, Electrolaminate Clutches for an Exosuit System. 23 October 2018. Available online: https://patents.google.com/patent/US10105839B2/en (accessed on 11 April 2023).
- CN-107137207-B, Based on Rope-Pulley Mechanism Drive Lacking Lower Limb Assistance Exoskeleton Robot. 17 May 2019. Available online: https://patents.google.com/patent/CN107137207B/en (accessed on 11 April 2023).
- CN-107411939-B, A Kind of Dedicated Power-Assisted Healing Robot of Single Lower Limb Individuals with Disabilities. 27 September 2019. Available online: https://patents.google.com/patent/CN107411939B/en (accessed on 12 April 2023).
- JP-6729870-B2, Exoskeleton Robot. 29 July 2020. Available online: https://patents.google.com/patent/JP6729870B2/en (accessed on 17 April 2023).
- US-11141342-B2, Wearable Robotic Device. 12 October 2021. Available online: https://patents.google.com/patent/US11141342B2/en (accessed on 18 April 2023).
- JP-5400890-B2, Wheelchair Walking Assist Robot. 29 January 2014. Available online: https://patents.google.com/patent/JP5400890B2/en (accessed on 18 April 2023).
- CN-106420271-B, It Is Single to Drive Bionical Gait Rehabilitation Training Robot System. 30 November 2018. Available online: https://patents.google.com/patent/CN106420271B/en (accessed on 19 April 2023).
- CN-106420203-B, The Ectoskeleton Wheelchair Integrated Mobile Auxiliary Robot of Telescopic. 20 April 2018. Available online: https://patents.google.com/patent/CN106420203B/en (accessed on 24 April 2023).
- US-20170340506-A1, Torque Control Methods for an Exoskeleton Device. 30 November 2017. Available online: https://patents.google.com/patent/US20170340506A1/en (accessed on 24 April 2023).
- CN-105232293-B, A Kind of Portable Waist Hunting Gear. 11 July 2017. Available online: https://patents.google.com/patent/CN105232293B/en (accessed on 25 April 2023).
- CN-105726272-B, A Kind of Unweighting Walking Rehabilitation Training Robot. 16 October 2018. Available online: https://patents.google.com/patent/CN105726272B/en (accessed on 25 April 2023).
- RU-2708223-C2, Actuation System for Hip Joint Orthosis. 4 December 2019. Available online: https://patents.google.com/patent/RU2708223C2/en (accessed on 25 April 2023).
- CN-108836759-B, Anti-Falling System Based on Lower Limb Exoskeleton Robot. 29 December 2020. Available online: https://patents.google.com/patent/CN108836759B/en (accessed on 26 April 2023).
- CN-106491318-B, A Kind of Unpowered Wearable Auxiliary Walking Servomechanism. 25 December 2018. Available online: https://patents.google.com/patent/CN106491318B/en (accessed on 26 April 2023).
- CN-108309593-B, A Kind of Sufficient Isomorphism Deformation Type Wheelchair Exoskeleton Robot of Wheel. 3 December 2019. Available online: https://patents.google.com/patent/CN108309593B/en (accessed on 26 April 2023).
- CN-106063760-B, The External Bone Robot of Hemiparalysis Recovery Type. 12 October 2018. Available online: https://patents.google.com/patent/CN106063760B/en (accessed on 26 April 2023).
- CN-109498375-B, Human Motion Intention Recognition Control Device and Control Method. 25 December 2020. Available online: https://patents.google.com/patent/CN109498375B/en (accessed on 27 April 2023).
- KR-101912920-B1, Ankle Module for Gait Rehabilitation Robot. 28 December 2018. Available online: https://patents.google.com/patent/KR101912920B1/en (accessed on 27 April 2023).
- CN-106236517-B, Exoskeleton Robot Leg Exercise System. 7 September 2018. Available online: https://patents.google.com/patent/CN106236517B/en (accessed on 27 April 2023).
- CN-106726369-B, A Kind of Detachable Recovery Set for Lower Limbs and Control Method. 30 April 2019. Available online: https://patents.google.com/patent/CN106726369B/en (accessed on 27 April 2023).
- US-10792209-B2, Wearable Assistive Device that Efficiently Delivers Assistive Force. 6 October 2020. Available online: https://patents.google.com/patent/US10792209B2/en (accessed on 27 April 2023).
- JP-6647225-B2, Leg Straightening Device and Straightening Device. 14 February 2020. Available online: https://patents.google.com/patent/JP6647225B2/en (accessed on 27 April 2023).
- CN-106214427-B, The Lower Limb Rehabilitation Ectoskeleton Control System and Method that Subject Dominates. 24 May 2019. Available online: https://patents.google.com/patent/CN106214427B/en (accessed on 27 April 2023).
- JP-6555790-B2, Assisted Rehabilitation Training Robot. 7 August 2019. Available online: https://patents.google.com/patent/JP6555790B2/en (accessed on 28 April 2023).
- CN-110559162-B, Lower Limb Exoskeleton Driver. 29 September 2020. Available online: https://patents.google.com/patent/CN110559162B/en (accessed on 28 April 2023).
- CN-110279562-B, Auxiliary Standing Device and Auxiliary Standing Mechanism. 28 December 2021. Available online: https://patents.google.com/patent/CN110279562B/en (accessed on 28 April 2023).
- CN-106236518-B, Exoskeleton Robot Line Winding Driving Hip Joint. 14 August 2018. Available online: https://patents.google.com/patent/CN106236518B/en (accessed on 2 May 2023).
- KR-101363850-B1, Robot for Assistance Exoskeletal Power. 18 February 2014. Available online: https://patents.google.com/patent/KR101363850B1/en (accessed on 2 May 2023).
- CN-108992259-B, Sit and Stand and Go Multi-Functional Motion Auxiliary Robot. 1 May 2020. Available online: https://patents.google.com/patent/CN108992259B/en (accessed on 2 May 2023).
- CN-105078708-B, A Kind of Exoskeleton Robot Follow-Up Control Device. 31 May 2017. Available online: https://patents.google.com/patent/CN105078708B/en (accessed on 2 May 2023).
- KR-101330343-B1, A Knee-Orthosis to Assist the Gait by Support the Knee-Joint. 15 November 2013. Available online: https://patents.google.com/patent/KR101330343B1/en (accessed on 3 May 2023).
- CN-106625605-B, A Kind of Light-Duty Ankle-Joint Ectoskeleton. 5 February 2019. Available online: https://patents.google.com/patent/CN106625605B/en (accessed on 3 May 2023).
- CN-111671624-B, Wearable Metatarsophalangeal Joint Walking Power Assisting Device. 27 August 2021. Available online: https://patents.google.com/patent/CN111671624B/en (accessed on 3 May 2023).
- EP-3539529-A1, Belt for Effective Wearing and Wearable Assistive Device Having the Same. 18 September 2019. Available online: https://patents.google.com/patent/EP3539529A1/en (accessed on 3 May 2023).
- RU-171262-U1, Femal Link of an Active Foot Orthosis. 25 May 2017. Available online: https://patents.google.com/patent/RU171262U1/en (accessed on 3 May 2023).
- KR-102130886-B1, Gait Rehabilitation Apparatus. 6 July 2020. Available online: https://patents.google.com/patent/KR102130886B1/en (accessed on 3 May 2023).
- CN-109940581-A, Exoskeleton and Mounting device. 28 June 2019. Available online: https://patents.google.com/patent/CN109940581A/en (accessed on 5 May 2023).
- CN-105997438-B, A Kind of Wearable Leg Power Brace of Self-Regulation. 12 February 2019. Available online: https://patents.google.com/patent/CN105997438B/en (accessed on 5 May 2023).
- CN-107174488-B, A Wheeled Drive Self-Balancing Power Ectoskeleton of Sole for Spinal Cord Injury Patient. 20 March 2020. Available online: https://patents.google.com/patent/CN107174488B/en (accessed on 5 May 2023).
- US-11191694-B2, Exoskeleton System. 7 December 2021. Available online: https://patents.google.com/patent/US11191694B2/en (accessed on 8 May 2023).
- CN-108888473- B, Lower Limb Joint Motion Control Method Based on Wearable Walking Assisting Exoskeleton. 9 April 2021. Available online: https://patents.google.com/patent/CN108888473B/en (accessed on 8 May 2023).
- DE-102016215399-B3, Mobility System. 5 October 2017. Available online: https://patents.google.com/patent/DE102016215399B3/en (accessed on 8 May 2023).
- KR-102334851-B1, Gait Assist Robot for Rehabilitation Training with Lift Device. 3 December 2021. Available online: https://patents.google.com/patent/KR102334851B1/en (accessed on 8 May 2023).
- KR-102305924-B1, Robot Device for Upper and Lower Extremity Rehabilitation. 30 September 2021. Available online: https://patents.google.com/patent/KR102305924B1/en (accessed on 8 May 2023).
- CN-110916970-B, Device and Method for Realizing Cooperative Motion of Weight-Reducing Vehicle and Lower Limb Robot through Communication. 21 September 2021. Available online: https://patents.google.com/patent/CN110916970B/en (accessed on 9 May 2023).
- CN-110946742-B, Device and Method for Assisting Lower Limb Robot to Transfer Gravity Center by Aid of Weight Reduction Vehicle. 19 November 2021. Available online: https://patents.google.com/patent/CN110946742B/en (accessed on 9 May 2023).
- KR-102317401-B1, Patient Weight Burden Reduction Device of Walking Rehabilitation Training Robot. 26 October 2021. Available online: https://patents.google.com/patent/KR102317401B1/en (accessed on 9 May 2023).
- KR-102292983-B1, Lower Extremity Exoskeleton Robotic Device. 24 August 2021. Available online: https://patents.google.com/patent/KR102292983B1/en (accessed on 9 May 2023).
- CN-110393656-B, Lower Limb Exoskeleton Capable of Being Used for Both Wheel and Leg. 11 May 2021. Available online: https://patents.google.com/patent/CN110393656B/en (accessed on 9 May 2023).
- CN-110292510-B, Auxiliary Dual-Purpose Outer Limb Robot for Human Body Movement. 8 September 2020. Available online: https://patents.google.com/patent/CN110292510B/en (accessed on 9 May 2023).
- KR-102081911-B1, Rehabilitation Robot. 26 February 2020. Available online: https://patents.google.com/patent/KR102081911B1/en (accessed on 10 May 2023).
- KR-102037316-B1, Leg Opening Joint of Walking Exoskeleton and Walking Exoskeleton Comprising the Same. 15 November 2019. Available online: https://patents.google.com/patent/KR102037316B1/en (accessed on 10 May 2023).
- CN-113183176-B, Motion Decoupling Parallel Driving Type Exoskeleton Robot Ankle Joint. 25 January 2022. Available online: https://patents.google.com/patent/CN113183176B/en (accessed on 10 May 2023).
- CN-106344344-B, A Kind of Human Foot’s Bionic Exoskeleton System. 28 August 2018. Available online: https://patents.google.com/patent/CN106344344B/en (accessed on 11 May 2023).
- KR-102002635-B1, Apparatus and Method for Observing Feedback Force of Wearable Exoskeleton System. 1 October 2019. Available online: https://patents.google.com/patent/KR102002635B1/en (accessed on 11 May 2023).
- CN218220559U, Upper Limb Rehabilitation Robot. 6 January 2023. Available online: https://patents.google.com/patent/CN218220559U/en (accessed on 11 May 2023).
- CN114851175B, Mechanical Exoskeleton. 28 October 2022. Available online: https://patents.google.com/patent/CN114851175B/en (accessed on 11 May 2023).
- CN218220558U, Lower Limb Exoskeleton Auxiliary Rehabilitation Robot. 6 January 2023. Available online: https://patents.google.com/patent/CN218220558U/en (accessed on 15 May 2023).
- CN218106330U, Rope-Driven Lower Limb Rehabilitation Robot. 23 December 2022. Available online: https://patents.google.com/patent/CN218106330U/en (accessed on 15 May 2023).
- CN218138043U, Integrated Load-Bearing Exoskeleton and Waist Exoskeleton. 27 December 2022. Available online: https://patents.google.com/patent/CN218138043U/en (accessed on 15 May 2023).
- CN217566689U, Knee Joint Rehabilitation Exercise Brace. 14 October 2022. Available online: https://patents.google.com/patent/CN217566689U/en (accessed on 15 May 2023).
- CN-108309688-B, Variable-Rigidity Flexible Driver for Exoskeleton Type Lower Limb Rehabilitation Robot. 6 December 2019. Available online: https://patents.google.com/patent/CN108309688B/en (accessed on 6 April 2023).
- CN-110507516-B, Constant-Force Human Body Suspension System for Rehabilitation Training. 29 September 2020. Available online: https://patents.google.com/patent/CN110507516B/en (accessed on 10 May 2023).
- CN217793742U, Wearable Lower Limb Rehabilitation Exoskeleton Robot. 15 November 2022. Available online: https://patents.google.com/patent/CN217793742U/en (accessed on 15 May 2023).
- CN217728730U, Moment Balance Multi-Limb Exoskeleton. 4 November 2022. Available online: https://patents.google.com/patent/CN217728730U/en (accessed on 11 May 2023).
- ES-2759298-T3, Support Structure. 8 May 2020. Available online: https://patents.google.com/patent/ES2759298T3/en (accessed on 6 April 2023).
- CN-105686927-B, Collapsible Mobile Lower Limb Exoskeleton. 11 July 2017. Available online: https://patents.google.com/patent/CN105686927B/en (accessed on 24 April 2023).
- KR-102336585-B1, Devices Designed to Be Positioned Near Joints and Systems Incorporating Such Devices. 9 December 2021. Available online: https://patents.google.com/patent/KR102336585B1/en (accessed on 11 May 2023).
- KR-101530525-B1, Wearable Crutch with Lap Joints. 23 June 2015. Available online: https://patents.google.com/patent/KR101530525B1/en (accessed on 4 April 2023).
- KR-101656695-B1, Gait Assistant Robot. 13 September 2016. Available online: https://patents.google.com/patent/KR101656695B1/en (accessed on 5 April 2023).
- KR-101997997-B1, Weight Bearing Brace. 8 July 2019. Available online: https://patents.google.com/patent/KR101997997B1/en (accessed on 10 April 2023).
- CN-106956243-B, A Kind of Bionical Lower Limb Exoskeleton Robot Driven Based on Rope. 2 August 2019. Available online: https://patents.google.com/patent/CN106956243B/en (accessed on 10 April 2023).
- CN-106109181-B, Reduction Exoskeleton Joint and Exoskeleton Power Assisting Device Thereof. 14 April 2020. Available online: https://patents.google.com/patent/CN106109181B/en (accessed on 18 April 2023).
- CN-108095980-B, A Kind of Passive Exoskeleton Device of Hip Joint Based on Energy Timesharing Regulation. 22 November 2019. Available online: https://patents.google.com/patent/CN108095980B/en (accessed on 18 April 2023).
- CN-109199786-B, Lower Limb Rehabilitation Robot Based on Bidirectional Neural Interface. 30 July 2021. Available online: https://patents.google.com/patent/CN109199786B/en (accessed on 24 April 2023).
- CN-105997441-B, Wearable Lower Limb Healing Robot Based on Ectoskeleton. 23 January 2018. Available online: https://patents.google.com/patent/CN105997441B/en (accessed on 24 April 2023).
- CN-105616113-B, A kind of Passive Energy Storage Foot Mechanism for Lower Limb Assistance Exoskeleton. 20 October 2017. Available online: https://patents.google.com/patent/CN105616113B/en (accessed on 24 April 2023).
- CN-109528451-B, A Kind of Passive Exoskeleton Device of Hip Knee Double Jointed Based on Clutch Timesharing Regulation. 8 October 2019. Available online: https://patents.google.com/patent/CN109528451B/en (accessed on 24 April 2023).
- JP-6800634-B2, Control Design Framework for Resistant Exoskeleton. 16 December 2020. Available online: https://patents.google.com/patent/JP6800634B2/en (accessed on 26 April 2023).
- CN-108670732-B, Walking Aid for Hemiplegia Patients. 30 June 2020. Available online: https://patents.google.com/patent/CN108670732B/en (accessed on 28 April 2023).
- CN-108354785-B, A Kind of Unpowered Walking Power-Assisted Flexible Exoskeleton Device. 20 September 2019. Available online: https://patents.google.com/patent/CN108354785B/en (accessed on 28 April 2023).
- EP-3322395-B1, Foot for a Robotic Exoskeleton for Assisted Walking of Persons Suffering from Locomotor Disorders. 17 July 2019. Available online: https://patents.google.com/patent/EP3322395B1/en (accessed on 2 May 2023).
- CN-105473116-B, External Structure Holder Device. 9 January 2018. Available online: https://patents.google.com/patent/CN105473116B/en (accessed on 2 May 2023).
- CN-110192966-B, Lower Limb Power Assisting Device. 8 February 2022. Available online: https://patents.google.com/patent/CN110192966B/en (accessed on 4 May 2023).
- EP-3549570-B1, Active Arm Passive Leg Exercise Machine with Guided Leg Movement. 8 March 2023. Available online: https://patents.google.com/patent/EP3549570B1/en (accessed on 5 May 2023).
- JP-5930354-B2, Foot Mounting Structure of Joint Motion Assist Device. 8 June 2016. Available online: https://patents.google.com/patent/JP5930354B2/en (accessed on 8 May 2023).
- CN-109528440-B, Lower Limb Exoskeleton Ankle Joint Based on Telecentric Mechanism. 2 March 2021. Available online: https://patents.google.com/patent/CN109528440B/en (accessed on 9 May 2023).
- CN-112245239-B, Locking-Free Hip Adjusting Device. 9 April 2021. Available online: https://patents.google.com/patent/CN112245239B/en (accessed on 10 May 2023).
- CN218138052U, Hip Joint Assistance Exoskeleton Robot. 27 December 2022. Available online: https://patents.google.com/patent/CN218138052U/en (accessed on 11 May 2023).
- CN218398109U, A Transport Auxiliary Device and Motion Auxiliary Assembly for Ectoskeleton. 31 January 2023. Available online: https://patents.google.com/patent/CN218398109U/en (accessed on 15 May 2023).
- CN217489209U, Walking Aid. 27 September 2022. Available online: https://patents.google.com/patent/CN217489209U/en (accessed on 15 May 2023).
- CN217833653U, Wear Comfortable Mechanical Ectoskeleton. 18 November 2022. Available online: https://patents.google.com/patent/CN217833653U/en (accessed on 15 May 2023).
- US-9498354-B2, Actuation System for a Joint. 22 November 2016. Available online: https://patents.google.com/patent/US9498354B2/en (accessed on 10 April 2023).
- JP-6105091-B2, Joint Motion Assist Device. 29 March 2017. Available online: https://patents.google.com/patent/JP6105091B2/en (accessed on 4 May 2023).
- KR-102027069-B1, Soft Exo Suit for Fall Prevention and Gait Assistance. 30 September 2019. Available online: https://patents.google.com/patent/KR102027069B1/en (accessed on 27 April 2023).
- CN-111823217-B, Variable-Rigidity Lower Limb Exoskeleton Robot Based on Shape Memory Alloy. 4 January 2022. Available online: https://patents.google.com/patent/CN111823217B/en (accessed on 3 May 2023).
- CN-108938340-B, Flexible Exoskeleton Robot Assisting Movement of Hip Joint and Knee Joint. 26 June 2020. Available online: https://patents.google.com/patent/CN108938340B/en (accessed on 3 May 2023).
- CN102846448, Portable and Wearable Exoskeleton Robot for Lower Limb Rehabilitation and Walk Aid. 2 January 2013. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN85785846&_cid=P21-LGB7EB-96710-1 (accessed on 15 May 2023).
- CN103417356, Gait Rehabilitation Training Robot. 4 December 2013. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN97924666&_cid=P21-LGB7EB-96710-1 (accessed on 16 May 2023).
- KR1020150054041, Lower Limb Gait Assistant Robot. 20 May 2015. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=KR151754929&_cid=P21-LGB7EB-96710-1 (accessed on 15 May 2023).
- KR1020180010854, Lower Limb Rehabilitation Training Mechanism for Providing Convenience of Training and Method of Using SAME. 31 January 2018. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=KR211188439&_cid=P21-LGB7EB-96710-1 (accessed on 15 May 2023).
- CN109938970, Wearable Lower Limb Exoskeleton Rehabilitation Robot. 28 June 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN248491331&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN110141467, Lower Limb Exoskeleton Wheel Type Rehabilitation Robot and Use Method Thereof. 20 August 2019. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN251214617&_cid=P21-LGB7EB-96710-2 (accessed on 16 May 2023).
- CN115006206, Controller Based on Exoskeleton Robot Double-Lower-Limb Muscle Force Compensation and Gait Mirror Image Adjusting Mechanism. 6 September 2022. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=CN374858909&_cid=P21-LGB7EB-96710-4 (accessed on 17 May 2023).
- US 11160715 B2, Support Rehabilitation Training Robot and Operation Method Thereof. 2 November 2021. Available online: https://lens.org/067-862-442-771-09X (accessed on 17 May 2023).
- US 9907722 B2, Admittance Shaping Controller for Exoskeleton Assistance of the Lower Extremities. 6 March 2018. Available online: https://lens.org/005-588-574-094-213 (accessed on 18 May 2023).
- EP 3398579 B1, Physical Therapy Support Robot and Operation Method Therefor. 18 November 2020. Available online: https://lens.org/198-764-064-092-604 (accessed on 18 May 2023).
- US 10421185 B2, Follow-Up Control Device for an Exoskeleton Robot. 24 September 2019. Available online: https://lens.org/049-942-123-063-130 (accessed on 22 May 2023).
- EP 2914230 B1, Mobility System Including an Exoskeleton Assembly Releasably Supported on a Wheeled Base. 23 May 2018. Available online: https://lens.org/147-796-546-386-927 (accessed on 23 May 2023).
- US 9687409 B2, Walking Assist Device. 27 June 2017. Available online: https://lens.org/193-266-718-750-853 (accessed on 23 May 2023).
- US 11135119 B2, Adaptable Robotic Gait Trainer. 5 October 2021. Available online: https://lens.org/148-229-812-066-228 (accessed on 23 May 2023).
- US 11083924 B2, Active Arm Passive Leg Exercise Machine with Guided Leg Movement. 10 August 2021. Available online: https://lens.org/074-952-979-711-073 (accessed on 24 May 2023).
- US 11400008 B2, Dynamic Mounting Mechanism for an Exoskeleton. 2 August 2022. Available online: https://lens.org/040-268-099-929-950 (accessed on 25 May 2023).
- EP 3616670 B1, Wearable Robotic Device. 5 May 2021. Available online: https://lens.org/065-483-262-505-162 (accessed on 25 May 2023).
- US 10603786 B2, Belt for Effective Wearing and Wearable Assistive Device Having the Same. 31 March 2020. Available online: https://lens.org/163-707-483-010-502 (accessed on 25 May 2023).
- US 10265565 B2, Support Frame and Related Unweighting System. 23 April 2019. Available online: https://lens.org/009-769-780-667-826 (accessed on 25 May 2023).
- EP 3501473 B1, Exoskeleton and Mounting Arrangement. 25 November 2020. Available online: https://lens.org/007-142-020-783-179 (accessed on 22 May 2023).
- US 10555865 B2, Torque Control Methods for an Exoskeleton Device. 11 February 2020. Available online: https://lens.org/047-903-718-822-568 (accessed on 24 May 2023).
- US 10549138 B2, Methods and Systems for an Exoskeleton to Reduce a Runners Metabolic Rate. 4 February 2020. Available online: https://lens.org/198-765-893-821-602 (accessed on 25 May 2023).
- US 10918558 B2, Portable Human Exoskeleton System. 16 February 2021. Available online: https://lens.org/182-222-289-182-830 (accessed on 23 May 2023).
- EP 3958814 B1, Locking and Adjustment Mechanism for Exoskeleton. 25 January 2023. Available online: https://lens.org/089-008-046-626-240 (accessed on 25 May 2023).
- EP 3256090 B1, Actuation System for Hip Orthosis. 15 August 2018. Available online: https://lens.org/147-488-616-360-614 (accessed on 25 May 2023).
- Kao, P.-C.; Lewis, C.L.; Ferris, D.P. Invariant ankle moment patterns when walking with and without a robotic ankle exoskeleton. J. Biomech. 2010, 43, 203–209. [Google Scholar] [CrossRef] [PubMed]
- Mekki, M.; Delgado, A.D.; Fry, A.; Putrino, D.; Huang, V. Robotic Rehabilitation and Spinal Cord Injury: A Narrative Review. Neurotherapeutics 2018, 15, 604–617. [Google Scholar] [CrossRef] [PubMed]
- Stampacchia, G.; Rustici, A.; Bigazzi, S.; Gerini, A.; Tombini, T.; Mazzoleni, S. Walking with a powered robotic exoskeleton: Subjective experience, spasticity and pain in spinal cord injured persons. Neurorehabilitation 2016, 39, 277–283. [Google Scholar] [CrossRef]
- Zhao, M.; Wang, G.; Wang, A.; Cheng, L.J.; Lau, Y. Robot-assisted distal training improves upper limb dexterity and function after stroke: A systematic review and meta-regression. Neurol. Sci. 2022, 43, 1641–1657. [Google Scholar] [CrossRef]
- Vinoj, P.G.; Jacob, S.; Menon, V.G.; Rajesh, S.; Khosravi, M.R. Brain-Controlled Adaptive Lower Limb Exoskeleton for Rehabilitation of Post-Stroke Paralyzed. IEEE Access 2019, 7, 132628–132648. [Google Scholar] [CrossRef]
- Karunakaran, K.; Nisenson, D.; Nolan, K. Alterations in Cortical Activity due to Robotic Gait Training in Traumatic Brain Injury. In Proceedings of the 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020. [Google Scholar]
- Capecci, M.; Pournajaf, S.; Galafate, D.; Sale, P.; Le Pera, D.; Goffredo, M.; De Pandis, M.F.; Andrenelli, E.; Pennacchioni, M.; Ceravolo, M.G.; et al. Clinical effects of robot-assisted gait training and treadmill training for Parkinson’s disease. A randomized controlled trial. Ann. Phys. Rehabil. Med. 2019, 62, 303–312. [Google Scholar] [CrossRef]
- Yeh, S.-W.; Lin, L.-F.; Tam, K.-W.; Tsai, C.-P.; Hong, C.-H.; Kuan, Y.-C. Efficacy of robot-assisted gait training in multiple sclerosis: A systematic review and meta-analysis. Mult. Scler. Relat. Disord. 2020, 41, 102034. [Google Scholar] [CrossRef]
- Pearce, A.J.; Adair, B.; Miller, K.; Ozanne, E.; Said, C.; Santamaria, N.; Morris, M.E. Robotics to Enable Older Adults to Remain Living at Home. J. Aging Res. 2012, 2012, 538169. [Google Scholar] [CrossRef] [PubMed]
- Payedimarri, A.B.; Ratti, M.; Rescinito, R.; Vanhaecht, K.; Panella, M. Effectiveness of Platform-Based Robot-Assisted Rehabilitation for Musculoskeletal or Neurologic Injuries: A Systematic Review. Bioengineering 2022, 9, 129. [Google Scholar] [CrossRef] [PubMed]
- Bryce, T.N.; Dijkers, M.P.; Kozlowski, A.J. Framework for Assessment of the Usability of Lower-Extremity Robotic Exoskeletal Orthoses. Am. J. Phys. Med. Rehabil. 2015, 94, 1000–1014. [Google Scholar] [CrossRef] [PubMed]
- Moreno, J.C.; Figueiredo, J.; Pons, L.J. Chapter 7—Exoskeletons for lower-limb rehabilitation. In Rehabilitation Robotics; Academic Press: Cambridge, MA, USA, 2018; pp. 89–99. [Google Scholar]
- Baud, R.; Ortlieb, A.; Olivier, J.; Bouri, M.; Bleuler, H. HIBSO hip exoskeleton: Toward a wearable and autonomous design. Mech. Mach. Sci. 2018, 48, 185–195. [Google Scholar] [CrossRef]
- Mayr, A.; Quirbach, E.; Picelli, A.; Kofler, M.; Smania, N.; Saltuari, L. Early robot-assisted gait retraining in non-ambulatory patients with stroke: A single blind randomized controlled trial. Eur. J. Phys. Rehabil. Med. 2018, 54, 819–826. [Google Scholar] [CrossRef] [PubMed]
- Ullas, U.; Rajendrakumar, P.K. Design of a Low-Cost Lower Limb Rehabilitation Exoskeleton System. In IOP Conference Series: Materials Science and Engineering, Volume 1132, Proceedings of the International Conference on Innovations in Mechanical Sciences (ICIMS 2021), Kerala, India, 19–20 February 2021; IOP Publishing: Bristol, UK, 2021. [Google Scholar]
- Luo, S.; Androwis, G.; Adamovich, S.; Nunez, E.; Su, H.; Zhou, X. Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning. J. Neuroeng. Rehabil. 2023, 20, 34. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; She, H.; Lu, H.; Fukuda, T.; Shen, Y. State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Appl. Sci. 2017, 7, 1182. [Google Scholar] [CrossRef]
- Plaza, A.; Hernandez, M.; Puyuelo, G.; Garces, E.; Garcia, E. Wearable rehabilitation exoskeletons of the lower limb: Analysis of versatility and adaptability. Disabil. Rehabil. Assist. Technol. 2020, 18, 392–406. [Google Scholar] [CrossRef]
- Pamungkas, D.S.; Caesarendra, W.; Soebakti, H.; Analia, R.; Susanto, S. Overview: Types of Lower Limb Exoskeletons. Electronics 2019, 8, 1283. [Google Scholar] [CrossRef]
- Kalita, B.; Narayan, J.; Dwivedy, S.K. Development of Active Lower Limb Robotic-Based Orthosis and Exoskeleton Devices: A Systematic Review. Int. J. Soc. Robot. 2021, 13, 775–793. [Google Scholar] [CrossRef]
- Slucock, T. A Systematic Review of Low-Cost Actuator Implementations for Lower-Limb Exoskeletons: A Technical and Financial Perspective. J. Intell. Robot. Syst. 2022, 106, 3. [Google Scholar] [CrossRef] [PubMed]
























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).