

Online Fall Detection Using Wrist Devices



Abstract
:1. Introduction
2. Machine Learning for Fall Detection and Related Work
- K-Nearest Neighbours (kNN)—since elements from the same class tend to have similar characteristics, the intuition behind kNN is to look at the data points around an unknown data point to classify it. Given a training set, with classes “fall” and “not a fall”, the distance of an unknown data point to every other data point is calculated in order to find the k nearest points. The data point is then attributed to the class of the majority of the selected neighbours. An odd k number should be chosen for binary classification problems to avoid ties in this classification.To estimate the nearest data points, several methods can be used to evaluate the distance between the points, namely Euclidean, Manhattan and Hamming distance, and cosine similarity [9]. The most popular for fall detection is the Euclidean distance. Considering a 2D Cartesian coordinate system, the distance d between two points (length of the path connecting them), A and B, is measured by Equation (2):
- Support Vector Machines (SVM)—briefly, SVM [10,11] classifies a given data point x using the decision function , following Equation (3):The previous equation attributes the class to a given point with the sign of the decision function, which is computed by Equation (4):The coefficients are the parameters to be adjusted and the are the training patterns, and b is the bias. The function K is a predefined kernel, usually a linear, quadratic or radial basis function.
- Decision Tree (DT)—“A decision tree is a classifier expressed as a recursive partition of the instance space. The decision tree consists of nodes that form a rooted tree, meaning it is a directed tree with a node called “root” that has no incoming edges. All other nodes have exactly one incoming edge. A node with outgoing edges is called an internal or test node. All other nodes are called leaves (also known as terminal or decision nodes). In a decision tree, each internal node splits the instance space into two or more sub-spaces according to a certain discrete function of the input attributes values.” [12] (p. 165).
2.1. Previous Datasets
- The reasoning for choosing each fall or non-fall movement—it is crucial that the selection of movements is explained, even if the movements chosen are frequent in the literature. Furthermore, the authors of [19] performed a comprehensive survey on how elderly people fall, with 704 women over 65 years old. The results indicate that most falls were caused by trips, slips and losses of balance. The survey highlighted that a fall must not be interpreted alone. Each fall movement has a context—what was happening before the fall (e.g., walking, jogging, sitting)—and a cause (e.g., a slip, a trip, fainting or falling asleep). Datasets where a fall movement starts with an individual standing perfectly still are not only inconsistent with real-life falls but may also inadvertently make researchers take advantage of such perfect conditions to train their algorithms. Moreover, fall movements that do not have a motive of happening (such as a slip) may further remove naturalness from an already unnatural, forced movement.
- Ideally, the number of individuals executing the actions should be as high as possible. However, due to time and availability constraints, the majority of the studies have low numbers of volunteers executing the actions several times. This approach skews the dataset introducing a bias since an individual is likely to repeat each movement in a more similar way than two different individuals performing the same movement.
- Young people’s movements are not equivalent to the elderly’s [18,20]. This issue, even though evident, is delicate to resolve. It can be difficult to ensure complete safety for an older person since the risk of injury is always inherent to falling. Results obtained with an algorithm trained with young people’s data must be carefully evaluated since its results would almost certainly deviate when applied to the elderly in real-life falls.
- Exact conditions of each movement must be documented. The literature lacks detailed descriptions of the exact conditions of each movement, making it hard for researchers to use available datasets.
2.2. Previous Fall Detection Systems
3. Materials and Methods
3.1. Dataset
Description of the Datasets’ Movements
3.2. Description of Participants
3.2.1. Dataset Acquisition Conditions
3.2.2. Ethical Approval and Consent to Participate
3.3. Data Analysis
3.3.1. Feature Selection
3.3.2. Transforming Raw Data to Different Frequencies and Window Sizes
- The first window would occupy the data between 0 s (the first datapoint) and 5 s (the closest data point to the 5-second mark)
- FS-1 features are then obtained for this window. The window is classified as ADL or as Fall based on the following criteria:
- −
- If the initial file was ADL, the window is always considered as ADL.
- −
- If the initial file was fall, and if the new window overlaps at least 50% of the “Actual Fall”, movement is considered a Fall. Otherwise, it is considered an ADL.
- The same would be done for other windows, considering a certain . For instance, for a , the following window would occupy the data between 1 and 6 s, and so on, until we reach the last possible 5-second window.
3.3.3. Study of Feature, Sensor, Algorithm, Frequency and Window Size Variations
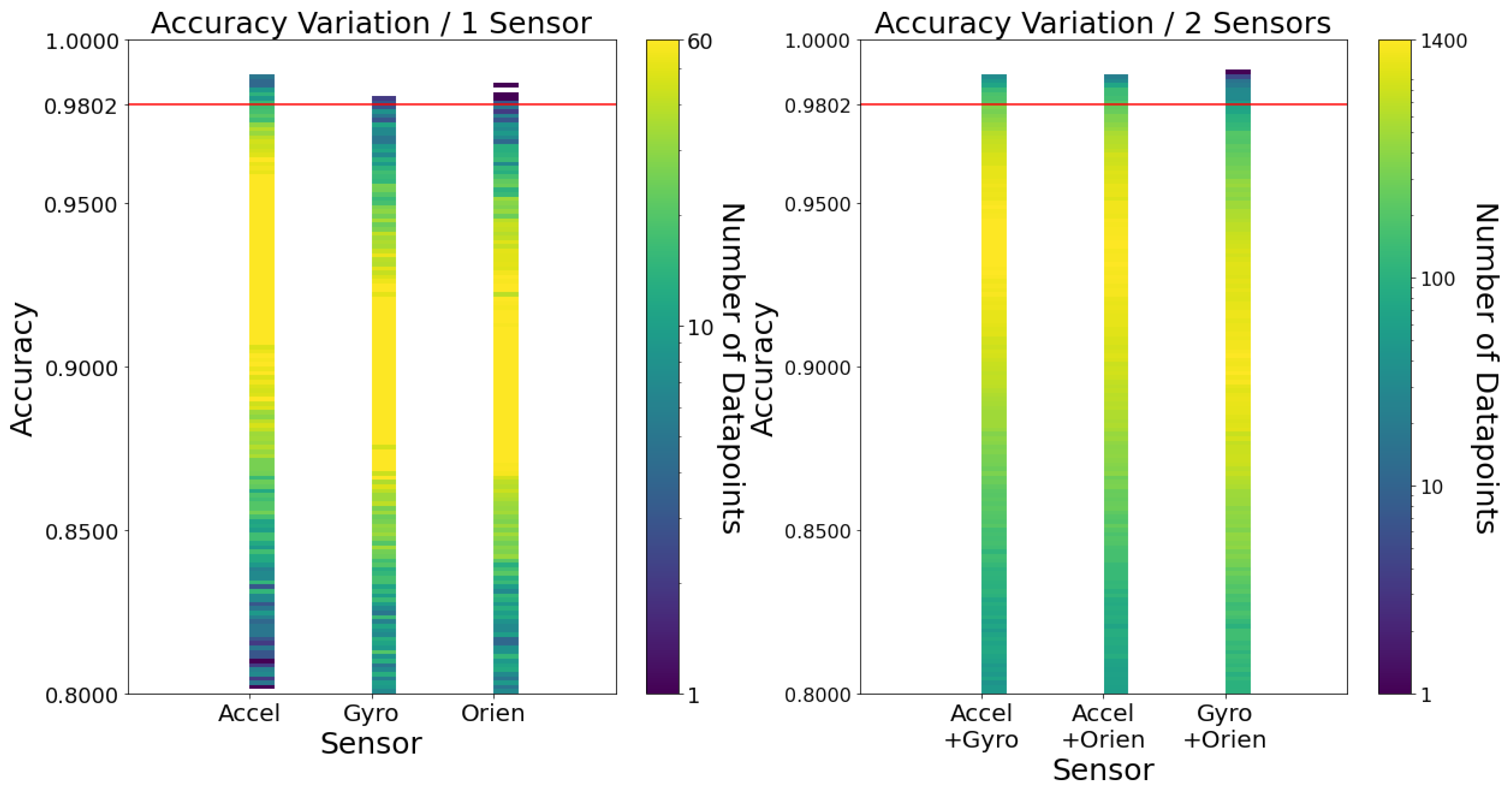
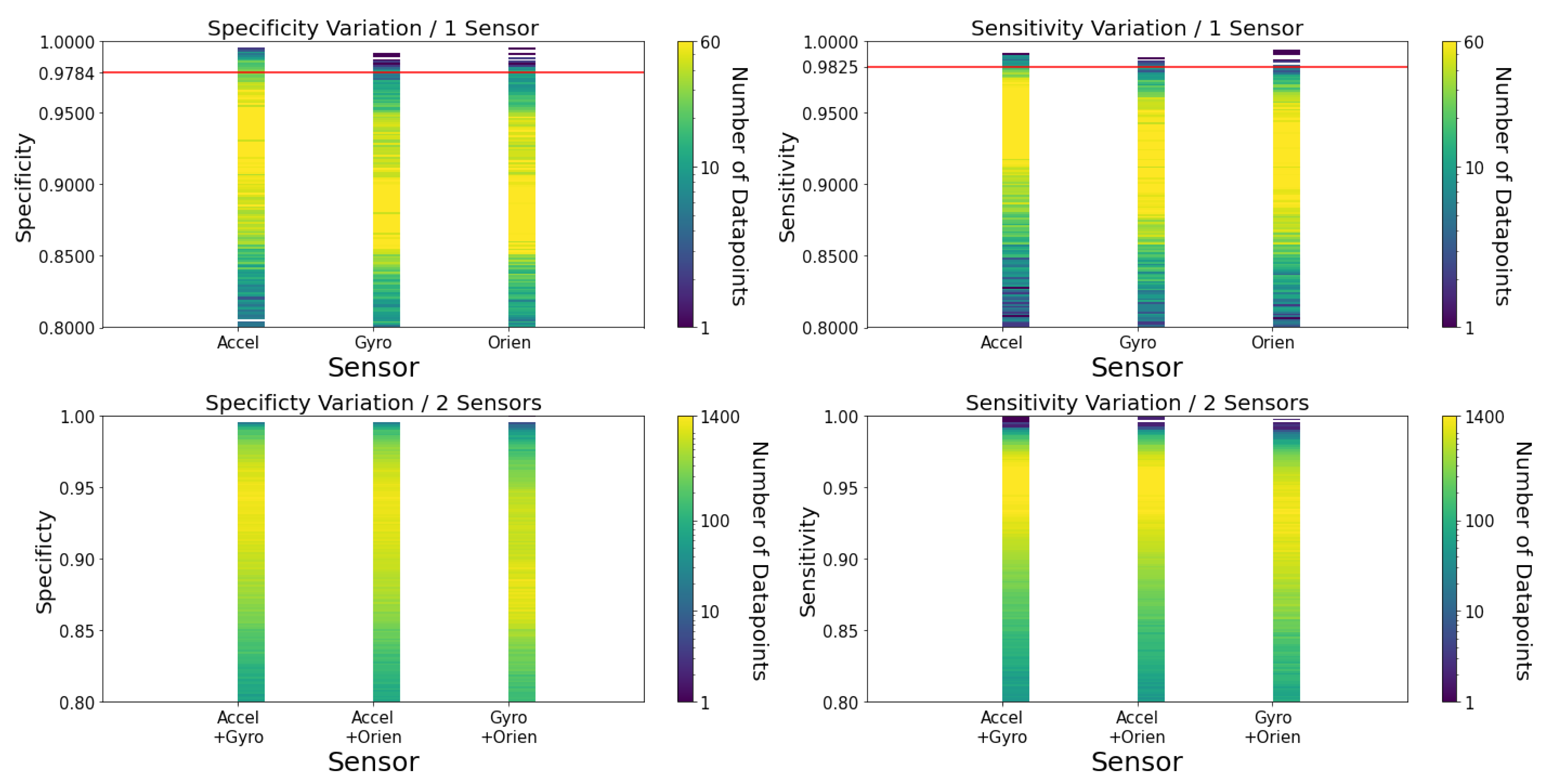
3.3.4. Varying Sensors
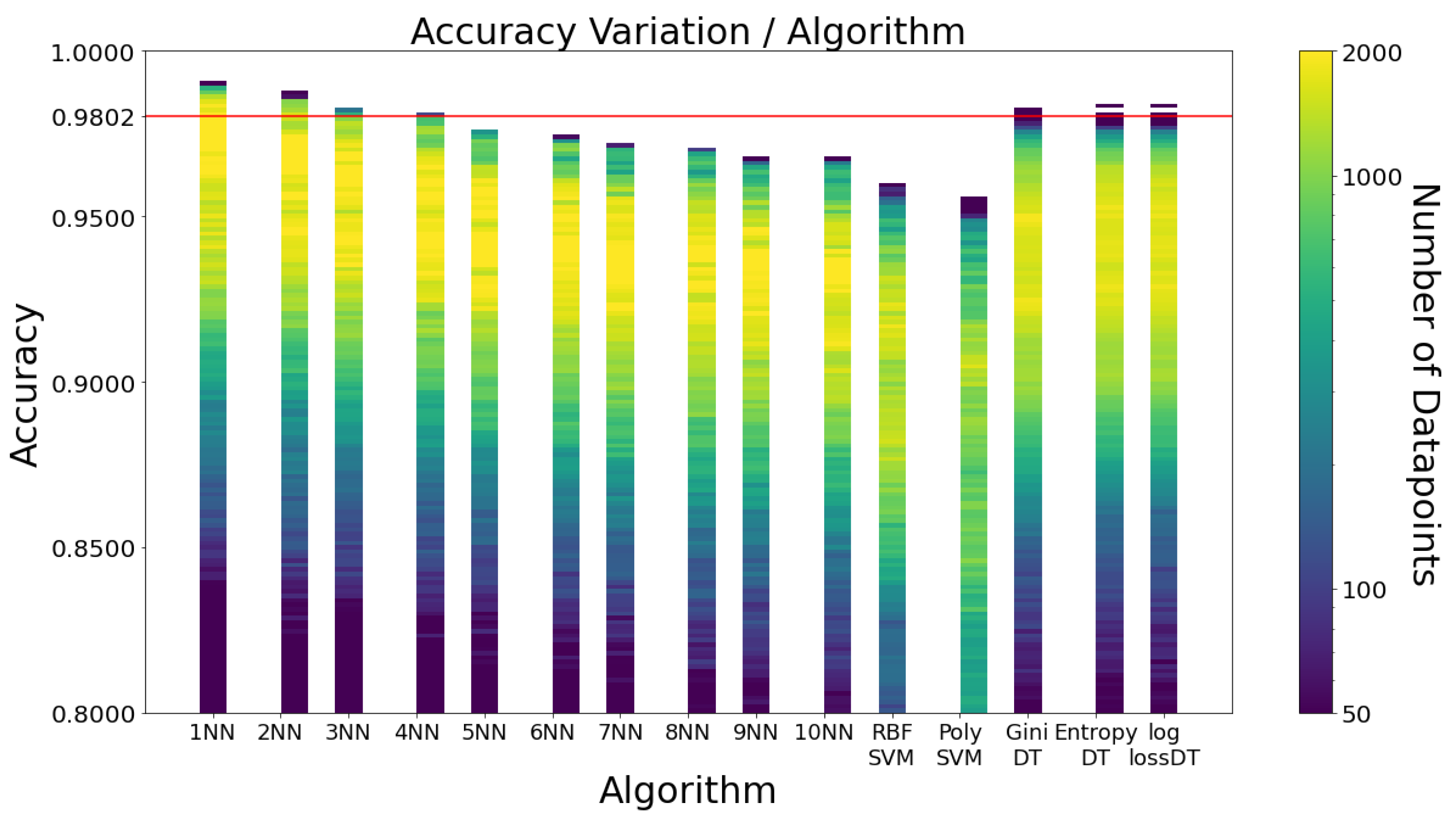
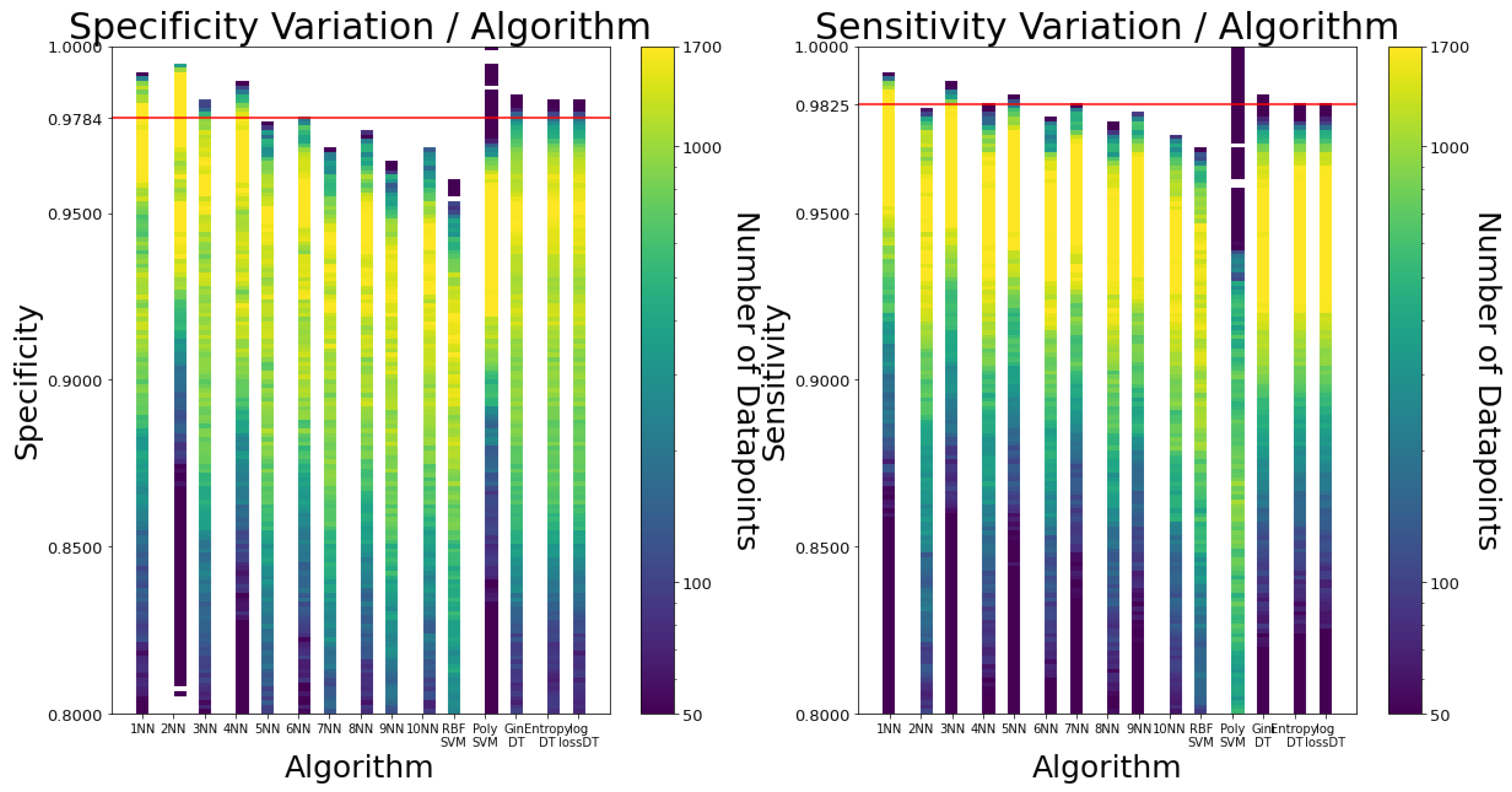
3.3.5. Varying Algorithms
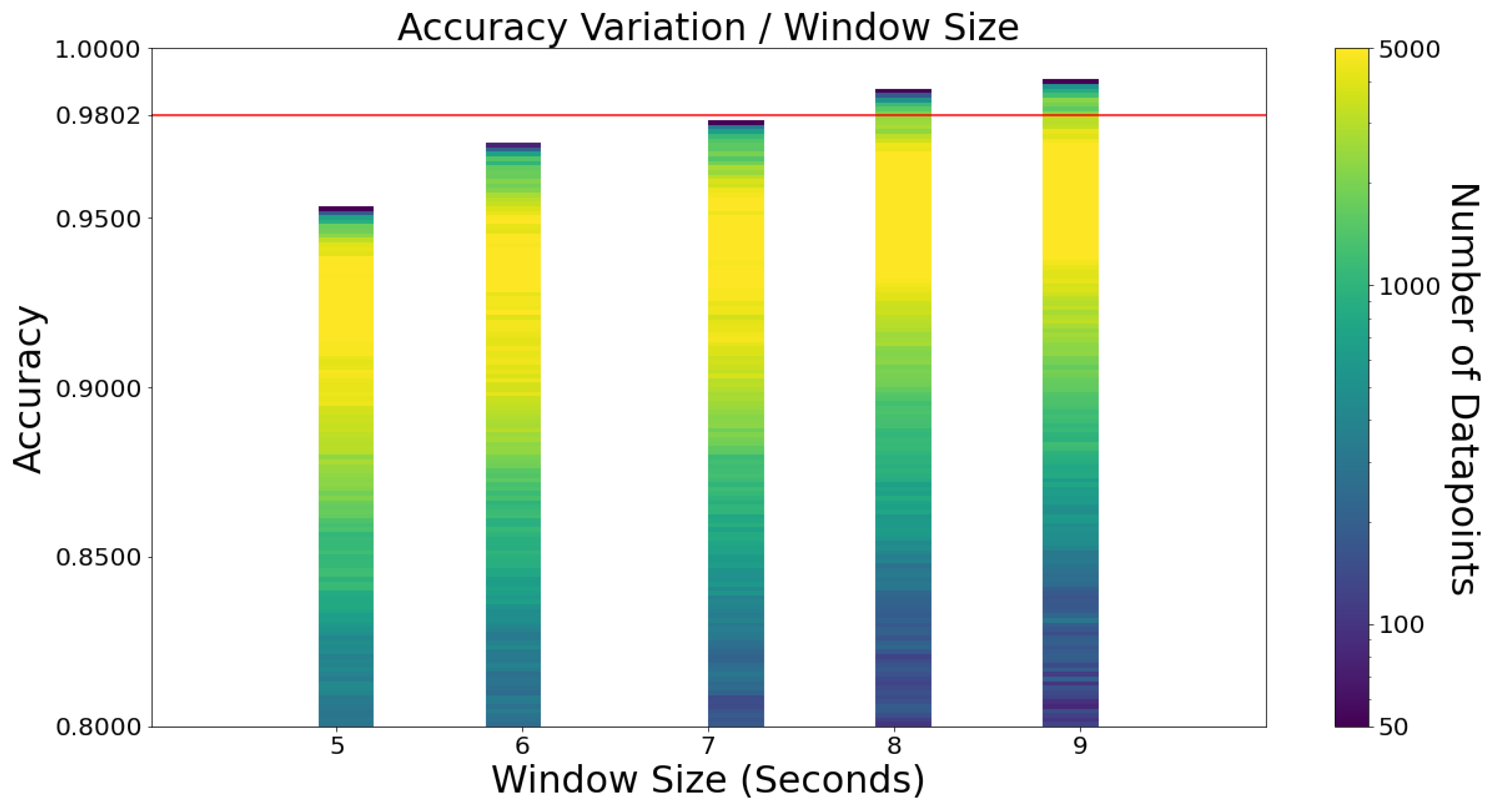
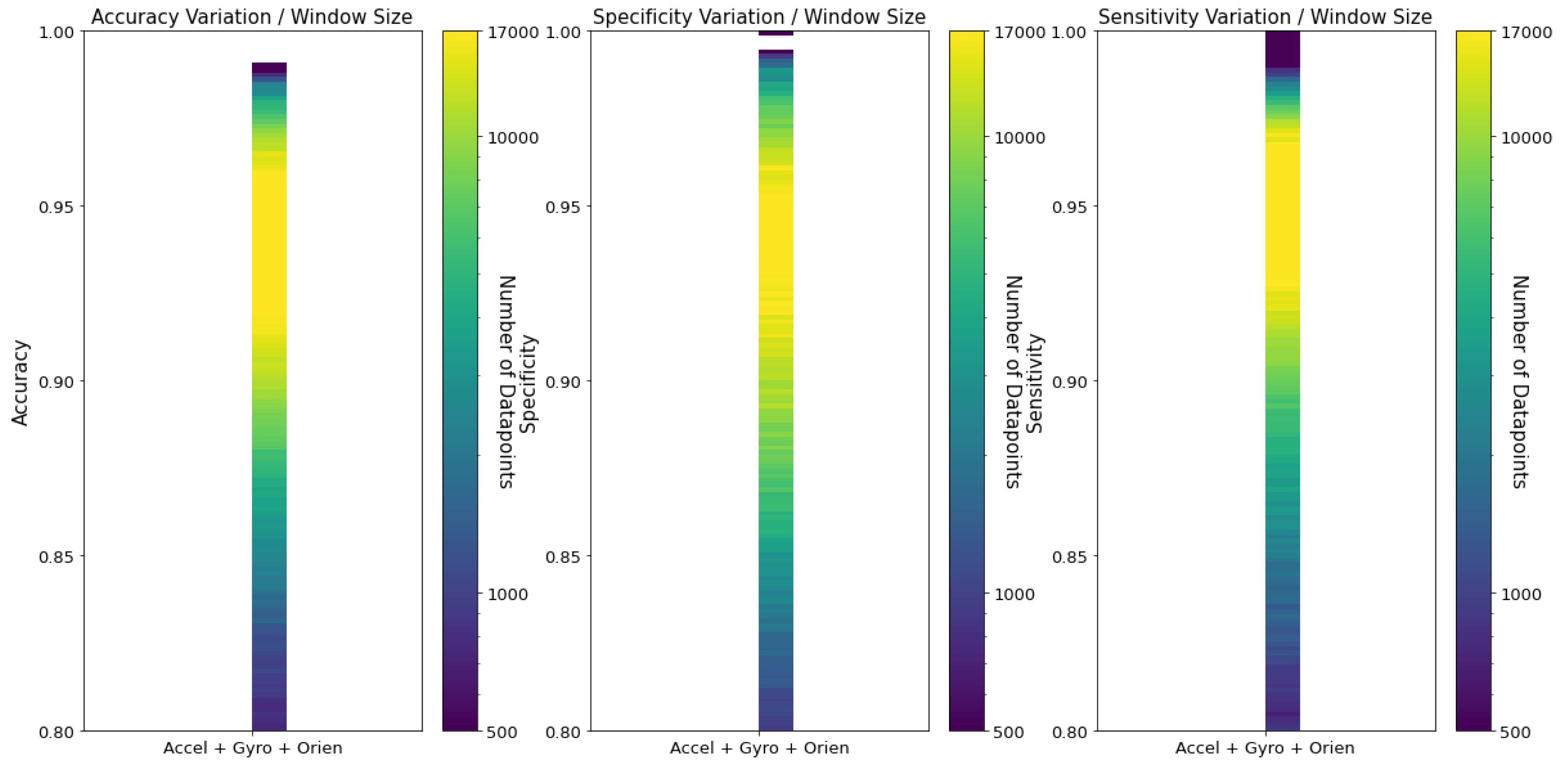
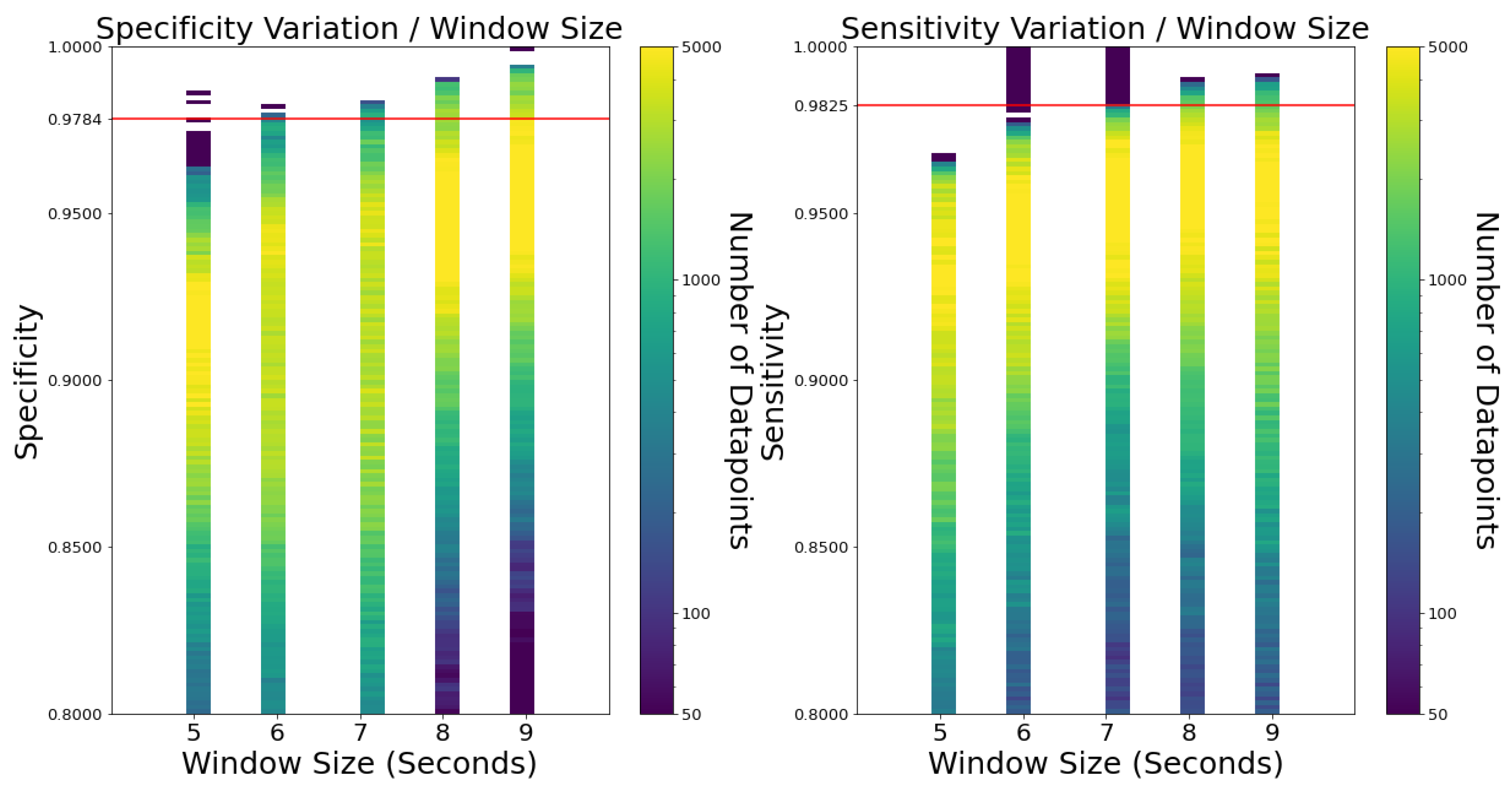
3.3.6. Varying Window Size
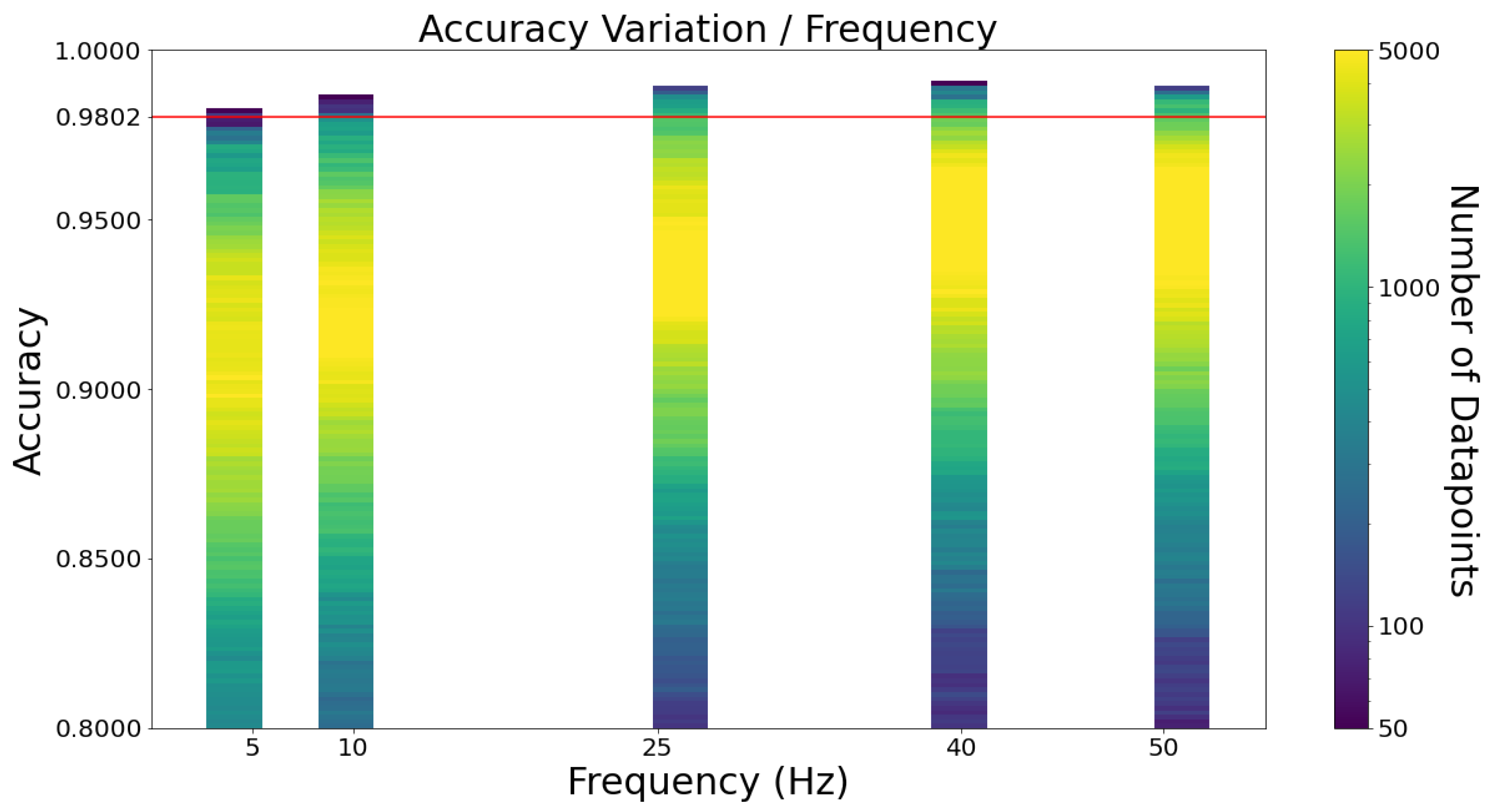
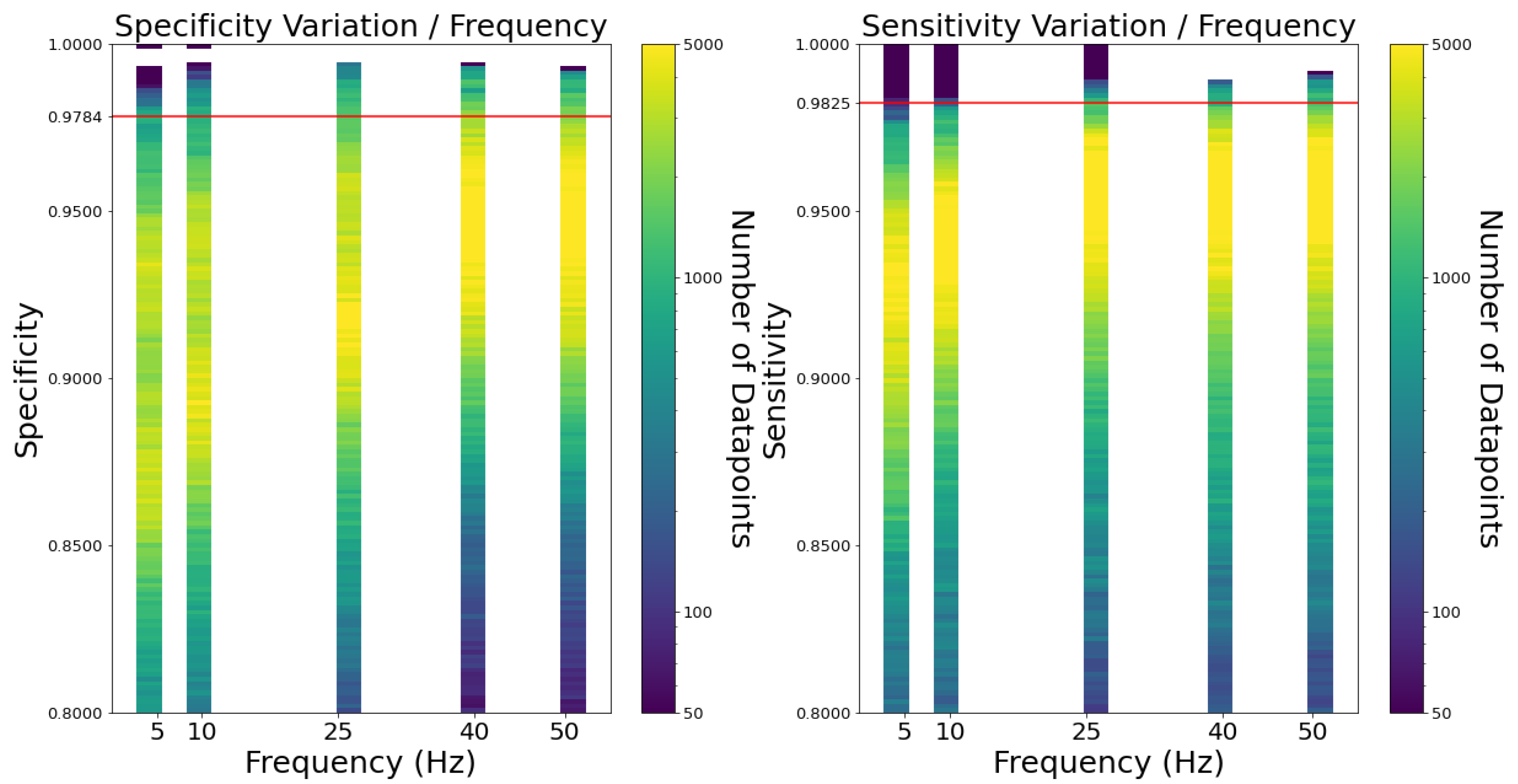
3.3.7. Varying Frequency
3.3.8. Results Discussion and Selection of Approach for Pilot
- In an attempt to reduce the number of sensors used by the fall detector, Section 3.3.4 acknowledged the accelerometer as the most relevant sensor for fall detection. Moreover, given that the accelerometer power consumption is tens of times less than the gyroscope, this work decided on an accelerometer-only solution.
- Section 3.3.5 concluded that although 1NN had the overall best results, kNN with only one neighbour may be unreliable. Therefore, 3NN was chosen, as it is the next odd number configuration with the highest accuracy values.
- The most surprising conclusion of this study concerns window sizes. Section 3.3.6 showed that bigger window sizes provide greater accuracy than smaller window sizes. The window size of the fall detector this work develops will be 9-ss long.
- Regarding frequencies, Section 3.3.7 inferred the predictable conclusion that lower frequency values have poorer accuracy performances. The accuracy variation is similar to 40 Hz and 50 Hz frequencies. This work decided on using a 50 Hz frequency for the following two reasons:
- −
- Given the previous choices, i.e., an accelerometer-only solution, having 3NN as the algorithm with a window size of 9 s, the best performing configuration was with a 50 Hz frequency.
- −
- The smartwatch’s performance was not compromised by using a 50 Hz frequency. Although this choice impacted the battery, it was considered to be worth it given the accuracy gain and its likely greater robustness when considering unknown movements.
The impact of different frequencies on a day-to-day basis on the fall detection performance is not evaluated in this work, so it may be part of future works. - Lastly, all four features of the low computational complexity FS-1 feature set (maximum, minimum, mean and variance) were used to train the algorithm, as it had the best accuracy than any other subset.
3.4. Impact of Personalisation of Data
3.5. Impact of Filtered Data
3.6. Impact of Vertical Acceleration
3.7. Impact of Elder Participants’ Data
4. Pilot Study and Results
4.1. Device Limitations
4.2. Feature Calculation
4.3. The Dataset Choice and Need for Learning Version
4.4. Solution Evaluation
5. Conclusions and Future Work
5.1. Conclusions
5.2. Future Work
5.2.1. Study How Other Algorithms and Features Would Perform on the Watch
5.2.2. Understand Impact of Personalisation
5.2.3. Understand Performance of Fall Detector with Elder People
5.2.4. Achieve Improvements by Contacting Fitbit
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| ADL | Activity of Daily Life |
| DT | Decision Tree |
| EPs | Elder Participants |
| FDS | Fall Detection System |
| FP | False Positive |
| FN | False Negative |
| IMU | Inertial Measurement Unit |
| MEMS | Micro-Electromechanical System |
| MLM | Machine Learning Method |
| SDK | Software Development Kit |
| SVMs | Support Vector Machines |
| YPs | Young Participants |
Appendix A





Appendix B












References
- WHO. Falls, Fact Sheet. 2021. Available online: https://www.who.int/en/news-room/fact-sheets/detail/falls (accessed on 28 November 2021).
- World Health Organization; Ageing and Life Course Unit. WHO Global Report on Falls Prevention in Older Age; World Health Organization: Geneva, Switzerland, 2008.
- Legters, K. Fear of falling. Phys. Ther. 2002, 82, 264–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vellas, B.J.; Wayne, S.J.; Romero, L.J.; Baumgartner, R.N.; Garry, P.J. Fear of falling and restriction of mobility in elderly fallers. Age Ageing 1997, 26, 189–193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- de Quadros, T.; Lazzaretti, A.E.; Schneider, F.K. A movement decomposition and machine learning-based fall detection system using wrist wearable device. IEEE Sens. J. 2018, 18, 5082–5089. [Google Scholar] [CrossRef]
- Wikipedia Contributors. Binary Classification—Wikipedia. The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Binary_classification&oldid=1022218348 (accessed on 8 January 2022).
- Wikipedia Contributors. Classification Rule—Wikipedia. The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Classification_rule&oldid=1051223560 (accessed on 8 January 2022).
- Wikipedia Contributors. Multiclass Classification—Wikipedia. The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Multiclass_classification&oldid=1023970866 (accessed on 8 January 2022).
- Pandit, S.; Gupta, S. A comparative study on distance measuring approaches for clustering. Int. J. Res. Comput. Sci. 2011, 2, 29–31. [Google Scholar] [CrossRef] [Green Version]
- Boser, B.E.; Guyon, I.M.; Vapnik, V.N. A training algorithm for optimal margin classifiers. In Proceedings of the Fifth Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Saleh, M.; Jeannès, R.L.B. Elderly fall detection using wearable sensors: A low cost highly accurate algorithm. IEEE Sens. J. 2019, 19, 3156–3164. [Google Scholar] [CrossRef]
- Rokach, L.; Maimon, O. Decision trees. In Data Mining and Knowledge Discovery Handbook; Springer: Berlin/Heidelberg, Germany, 2005; pp. 165–192. [Google Scholar]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E. A hybrid temporal reasoning framework for fall monitoring. IEEE Sens. J. 2017, 17, 1749–1759. [Google Scholar] [CrossRef]
- Martínez-Villaseñor, L.; Ponce, H.; Brieva, J.; Moya-Albor, E.; Núñez-Martínez, J.; Peñafort-Asturiano, C. UP-fall detection dataset: A multimodal approach. Sensors 2019, 19, 1988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Casilari, E.; Santoyo-Ramón, J.A.; Cano-García, J.M. Umafall: A multisensor dataset for the research on automatic fall detection. Procedia Comput. Sci. 2017, 110, 32–39. [Google Scholar] [CrossRef]
- Vavoulas, G.; Pediaditis, M.; Chatzaki, C.; Spanakis, E.G.; Tsiknakis, M. The mobifall dataset: Fall detection and classification with a smartphone. Int. J. Monit. Surveill. Technol. Res. (IJMSTR) 2014, 2, 44–56. [Google Scholar] [CrossRef]
- Medrano, C.; Igual, R.; Plaza, I.; Castro, M. Detecting falls as novelties in acceleration patterns acquired with smartphones. PLoS ONE 2014, 9, e94811. [Google Scholar] [CrossRef] [PubMed]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. SisFall: A fall and movement dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lord, S.R.; Ward, J.A.; Williams, P.; Anstey, K.J. An epidemiological study of falls in older community-dwelling women: The Randwick falls and fractures study. Aust. J. Public Health 1993, 17, 240–245. [Google Scholar] [CrossRef] [PubMed]
- Bagala, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hussain, F.; Hussain, F.; Ehatisham-ul Haq, M.; Azam, M.A. Activity-aware fall detection and recognition based on wearable sensors. IEEE Sens. J. 2019, 19, 4528–4536. [Google Scholar] [CrossRef]
- Yuan, J.; Tan, K.K.; Lee, T.H.; Koh, G.C.H. Power-efficient interrupt-driven algorithms for fall detection and classification of activities of daily living. IEEE Sens. J. 2014, 15, 1377–1387. [Google Scholar] [CrossRef]
- Vergara, P.M.; De La Cal, E.; Villar, J.R.; González, V.M.; Sedano, J. An IoT platform for epilepsy monitoring and supervising. J. Sens. 2017, 2017, 6043069. [Google Scholar] [CrossRef] [Green Version]
- Deutsch, M.; Burgsteiner, H. A Smartwatch-Based Assistance System for the Elderly Performing Fall Detection, Unusual Inactivity Recognition and Medication Reminding. In Proceedings of the eHealth Summit Austria, Viena, Austria, May 2016; pp. 259–266. [Google Scholar]
- Liu, Q.; Williamson, J.; Li, K.; Mohrman, W.; Lv, Q.; Dick, R.P.; Shang, L. Gazelle: Energy-efficient wearable analysis for running. IEEE Trans. Mob. Comput. 2016, 16, 2531–2544. [Google Scholar] [CrossRef]
- Cook, J.D. Accurately Computing Running Variance. 2022. Available online: https://www.johndcook.com/blog/standard_deviation/ (accessed on 10 October 2022).
- Knuth, D.E. Seminumerical algorithms. Art Comput. Program. 1997, 2, 232. [Google Scholar]
- iFixit. Teardown, Fitbit Sense. 2022. Available online: https://pt.ifixit.com/Teardown/Fitbit+Sense+Teardown/137130 (accessed on 6 January 2022).
- Moscaritolo, A. Review, Fitbit Sense. 2022. Available online: https://www.pcmag.com/reviews/fitbit-sense (accessed on 21 October 2022).
- Fitbit. Sale Advertisement, Fitbit Sense. 2022. Available online: https://www.fitbit.com/global/us/products/smartwatches/sense#features (accessed on 21 October 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Activity |
|---|---|
| F01 | Fall forward while walking caused by a slip |
| F02 | Lateral fall while walking caused by a slip |
| F03 | Fall backward while walking caused by a slip |
| F04 | Fall forward while walking caused by a trip |
| F05 | Fall backward when trying to sit down |
| F06 | Fall forward while sitting, caused by fainting or falling asleep |
| F07 | Fall backward while sitting, caused by fainting or falling asleep |
| F08 | Lateral fall while sitting, caused by fainting or falling asleep |
| Code | Activity |
|---|---|
| D01 | Walking |
| D02 | Jogging |
| D03 | Walking up and downstairs |
| D04 | Sitting on a chair, waiting a moment and getting up |
| D05 | Sitting a moment, attempting to get up and collapsing into a chair |
| D06 | Crouching (bending at the knees), tie shoes, and get up |
| D07 | Stumble while walking |
| D08 | Gently jump without falling (trying to reach high object) |
| D09 | Hit table with hand |
| D10 | Clapping hands |
| D11 | Opening and closing door |
| User_id | Age | Height (m) | Weight (Kg) | Gender |
|---|---|---|---|---|
| 1 | 22 | 1.76 | 56.3 | Male |
| 2 | 22 | 1.78 | 56.0 | Male |
| 3 | 20 | 1.73 | 69.5 | Male |
| 4 | 21 | 1.70 | 57.1 | Female |
| 5 | 23 | 1.67 | 59.6 | Male |
| 6 | 22 | 1.67 | 69.0 | Male |
| 7 | 21 | 1.78 | 68.1 | Male |
| 8 | 23 | 1.62 | 61.0 | Female |
| 9 | 22 | 1.70 | 52.0 | Female |
| 10 | 23 | 1.83 | 77.0 | Male |
| 11 | 23 | 1.69 | 61.8 | Female |
| 12 | 23 | 1.78 | 64.5 | Female |
| 13 | 22 | 1.79 | 66.0 | Male |
| 14 | 46 | 1.84 | 83.0 | Male |
| User_id | Age | Height (m) | Weight (Kg) | Gender |
|---|---|---|---|---|
| 21 | 95 | 1.70 | 71.0 | Male |
| 22 | 85 | 1.53 | 62.0 | Female |
| 23 | 82 | 1.60 | 60.0 | Female |
| 24 | 81 | 1.52 | 63.0 | Female |
| 25 | 81 | 1.73 | 72.0 | Female |
| 26 | 83 | 1.75 | 85.0 | Male |
| 27 | 89 | 1.71 | 71.5 | Male |
| 28 | 88 | 1.57 | 52.5 | Female |
| 29 | 77 | 1.60 | 65.9 | Female |
| 30 | 80 | 1.79 | 72.0 | Male |
| 31 | 88 | 1.63 | 53.0 | Female |
| User_id | Activities Performed |
|---|---|
| 21 | D01; D04; D09; D10; D11; |
| 22 | D01; D04; D09; D10; D11; |
| 23 | D01; D03; D04; D09; D10; D11; |
| 24 | D01; D03; D04; D09; D10; D11; |
| 25 | D01; D04; D09; D10; D11; |
| 26 | D01; D03; D04; D09; D10; D11; |
| 27 | D01; D03; D04; D09; D10; D11; |
| 28 | D01; D03; D04; D09; D10; D11; |
| 29 | D01; D03; D04; D09; D10; D11; |
| 30 | D01; D03; D04; D09; D10; D11; |
| 31 | D01; D03; D04; D09; D10; D11; |
| Algorithm | Accuracy Mean | Accuracy stdev | Specificity Mean | Specificity stdev | Sensitivity Mean | Sensitivity stdev |
|---|---|---|---|---|---|---|
| 3NN | 0.94292 | 0.02835 | 0.94128 | 0.05029 | 0.94483 | 0.02248 |
| 8NN | 0.93988 | 0.02696 | 0.94691 | 0.03385 | 0.93103 | 0.05587 |
| 7NN | 0.93833 | 0.02193 | 0.93576 | 0.03563 | 0.94138 | 0.04967 |
| 5NN | 0.93524 | 0.02770 | 0.93576 | 0.03824 | 0.93448 | 0.03738 |
| 6NN | 0.93524 | 0.03215 | 0.94965 | 0.04424 | 0.91724 | 0.05897 |
| 1NN | 0.93369 | 0.03127 | 0.94413 | 0.03603 | 0.92069 | 0.03575 |
| 4NN | 0.93369 | 0.03569 | 0.96084 | 0.03516 | 0.90000 | 0.05770 |
| 9NN | 0.92756 | 0.02594 | 0.91909 | 0.03076 | 0.93793 | 0.05666 |
| 2NN | 0.92755 | 0.02483 | 0.97203 | 0.02981 | 0.87241 | 0.03575 |
| 10NN | 0.92448 | 0.02276 | 0.92187 | 0.03263 | 0.92759 | 0.06022 |
| rbf_SVM | 0.92295 | 0.00956 | 0.92187 | 0.03680 | 0.92414 | 0.04815 |
| poly_SVM | 0.91369 | 0.01930 | 0.94695 | 0.03362 | 0.87241 | 0.05796 |
| entropy_DT | 0.88754 | 0.03098 | 0.89147 | 0.02636 | 0.87931 | 0.04043 |
| gini_DT | 0.88594 | 0.02424 | 0.89687 | 0.02154 | 0.87586 | 0.02833 |
| log_loss_DT | 0.88134 | 0.04027 | 0.89421 | 0.02296 | 0.86207 | 0.04223 |
| Metric | Description | Equation |
|---|---|---|
| Accuracy | Number of correctly predicted data points out of all the data points | |
| Sensitivity | Proportion of actual positive cases, which got predicted correctly | |
| Specificity | Proportion of actual negative cases, which got predicted correctly |
| Configuration | Features | Accuracy Mean | Accuracy stdev | Specificity Mean | Specificity stdev | Sensitivity Mean | Sensitivity stdev |
|---|---|---|---|---|---|---|---|
| 1NN 40 Hz, 9 s | Accel—Max, Min, Mean Gyro—Min, Variance Orien—Min, Variance | 0.98936 | 0.00662 | 0.99081 | 0.00431 | 0.98757 | 0.01225 |
| 1NN 40 Hz, 9 s | Accel—Max, Min, Mean Gyro—Min, Mean, Variance Orien—Min, Variance | 0.98936 | 0.00662 | 0.99081 | 0.00431 | 0.98757 | 0.01225 |
| 1NN 40 Hz, 9 s | Accel—Max, Min, Mean Gyro—Min, Mean, Variance Orien—Min | 0.98936 | 0.00662 | 0.99081 | 0.00431 | 0.98757 | 0.01225 |
| 1NN 40 Hz, 9 s | Accel—Max, Min, Mean Gyro—Min, Variance Orien—Min | 0.98936 | 0.00662 | 0.99081 | 0.00431 | 0.98757 | 0.01225 |
| 3NN 40 Hz, 9 s | Accel—Max, Min, Mean, Variance | 0.98025 | 0.00463 | 0.97842 | 0.00839 | 0.98249 | 0.00368 |
| User_id | Accuracy Mean | Accuracy stdev | Specificity Mean | Specificity stdev | Sensitivity Mean | Sensitivity stdev |
|---|---|---|---|---|---|---|
| 8 | 0.99753 | 0.00552 | 1.00000 | 0.00000 | 0.99500 | 0.01118 |
| 9 | 0.99630 | 0.00828 | 0.99310 | 0.01542 | 1.00000 | 0.00000 |
| 2 | 0.99333 | 0.00913 | 1.00000 | 0.00000 | 0.98182 | 0.02490 |
| 7 | 0.99286 | 0.00978 | 1.00000 | 0.00000 | 0.98261 | 0.02381 |
| 1 | 0.98987 | 0.01059 | 0.98105 | 0.02807 | 0.99574 | 0.00952 |
| 11 | 0.98571 | 0.02130 | 1.00000 | 0.00000 | 0.93056 | 0.10111 |
| 10 | 0.98408 | 0.01671 | 0.99333 | 0.01491 | 0.97000 | 0.04472 |
| 6 | 0.98290 | 0.01566 | 0.97167 | 0.04652 | 0.99048 | 0.01304 |
| 4 | 0.98286 | 0.02556 | 0.98519 | 0.03313 | 0.97778 | 0.04969 |
| 12 | 0.98252 | 0.02622 | 1.00000 | 0.00000 | 0.94182 | 0.08851 |
| All Users | 0.98025 | 0.00463 | 0.97842 | 0.00839 | 0.98249 | 0.00368 |
| 14 | 0.97549 | 0.01489 | 0.94127 | 0.03285 | 0.99565 | 0.00972 |
| 13 | 0.97401 | 0.01822 | 0.96800 | 0.03347 | 0.98139 | 0.02550 |
| 3 | 0.97287 | 0.02872 | 0.98261 | 0.03889 | 0.94286 | 0.07825 |
| 5 | 0.97160 | 0.01693 | 0.95936 | 0.04622 | 0.98421 | 0.01441 |
| Label | Accuracy Mean | Accuracy stdev | Specificity Mean | Specificity stdev | Sensitivity Mean | Sensitivity stdev |
|---|---|---|---|---|---|---|
| No Filtered Data | 0.98025 | 0.00463 | 0.97842 | 0.00839 | 0.98249 | 0.00368 |
| Three Sensors Filtered Data | 0.97820 | 0.00414 | 0.97978 | 0.00787 | 0.97624 | 0.00253 |
| Accel-Only Filtered Data | 0.97313 | 0.00414 | 0.97427 | 0.00733 | 0.97172 | 0.00281 |
| Label | Accuracy Mean | Accuracy stdev | Specificity Mean | Specificity stdev | Sensitivity Mean | Sensitivity stdev |
|---|---|---|---|---|---|---|
| Normal Accel | 0.98025 | 0.00463 | 0.97842 | 0.00839 | 0.98249 | 0.00368 |
| Vertical Accel + Gyro | 0.97185 | 0.00504 | 0.97197 | 0.00696 | 0.97172 | 0.00776 |
| Only Vertical Accel | 0.96577 | 0.00516 | 0.96370 | 0.00893 | 0.96832 | 0.00760 |
| Label | Accuracy Mean | Accuracy stdev | Specificity Mean | Specificity stdev | Sensitivity Mean | Sensitivity stdev |
|---|---|---|---|---|---|---|
| 3 sensors EPs’ data | 0.98247 | 0.00786 | 0.97108 | 0.01324 | 0.98963 | 0.00655 |
| Accel only EPs’ data | 0.98141 | 0.00860 | 0.96969 | 0.01155 | 0.98876 | 0.00785 |
| YPs’ data | 0.98025 | 0.00463 | 0.97842 | 0.00839 | 0.98249 | 0.00368 |
| User_id | Age | Battery Lifetime | #Falls Correctly Detected | #False Negatives | #False Positives | #Datapoints |
|---|---|---|---|---|---|---|
| 1 | 22 | 33 h | 3 | 1 | 4 | ∼570 |
| 5 | 23 | 33 h | 4 | 1 | 7 | ∼578 |
| A | 61 | 32 h | 1 | 0 | 12 | ∼650 |
| 1 | 22 | 35 h | 3 | 1 | 2 | ∼400 |
| B | 56 | 35 h | 0 | 0 | 0 | ∼406 |
| C | 86 | 35 h | 0 | 0 | 0 | ∼406 |
| A | 61 | 35 h | 0 | 0 | 0 | ∼406 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marques, J.; Moreno, P. Online Fall Detection Using Wrist Devices. Sensors 2023, 23, 1146. https://doi.org/10.3390/s23031146
Marques J, Moreno P. Online Fall Detection Using Wrist Devices. Sensors. 2023; 23(3):1146. https://doi.org/10.3390/s23031146
Chicago/Turabian StyleMarques, João, and Plinio Moreno. 2023. "Online Fall Detection Using Wrist Devices" Sensors 23, no. 3: 1146. https://doi.org/10.3390/s23031146
APA StyleMarques, J., & Moreno, P. (2023). Online Fall Detection Using Wrist Devices. Sensors, 23(3), 1146. https://doi.org/10.3390/s23031146