
A Method for Accessing the Non-Slip Function of Socks in an Acute Maneuver

Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Types of Socks and Shoes
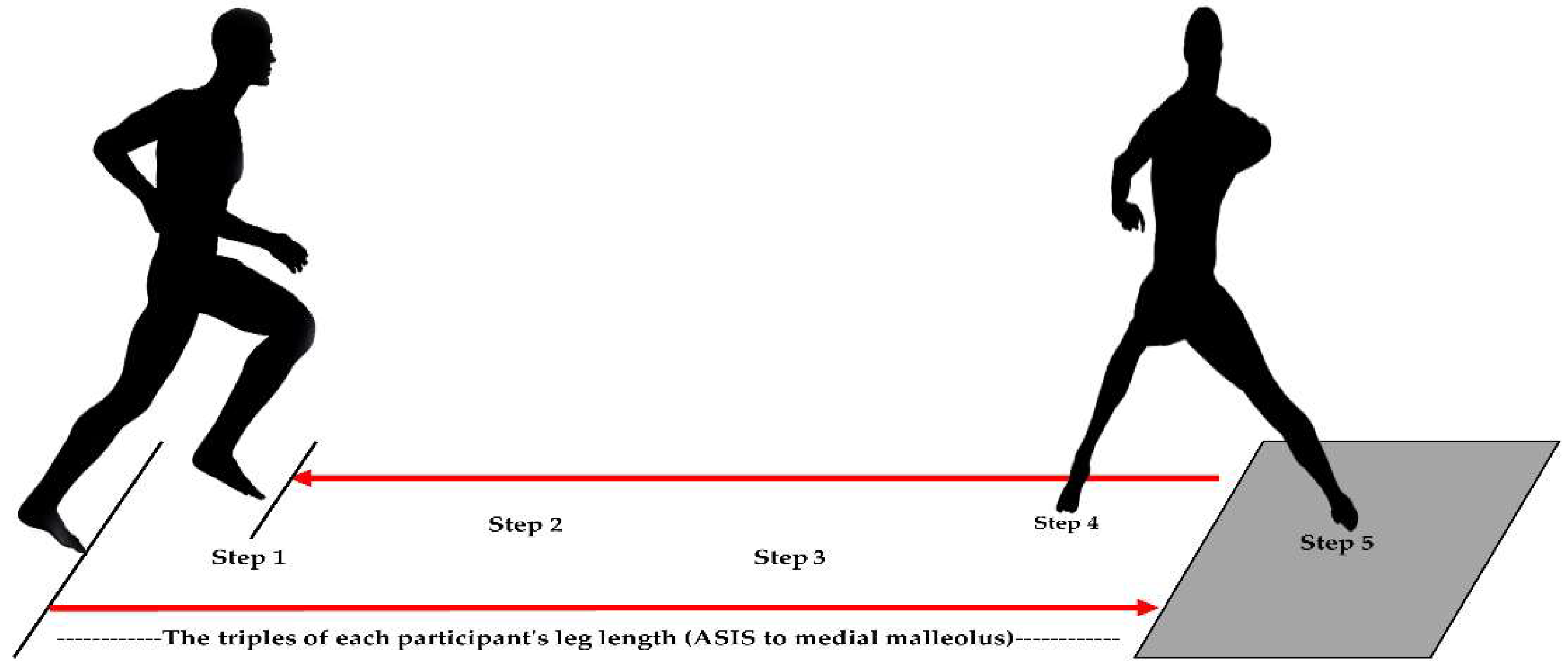
2.3. Emperimental Procedure
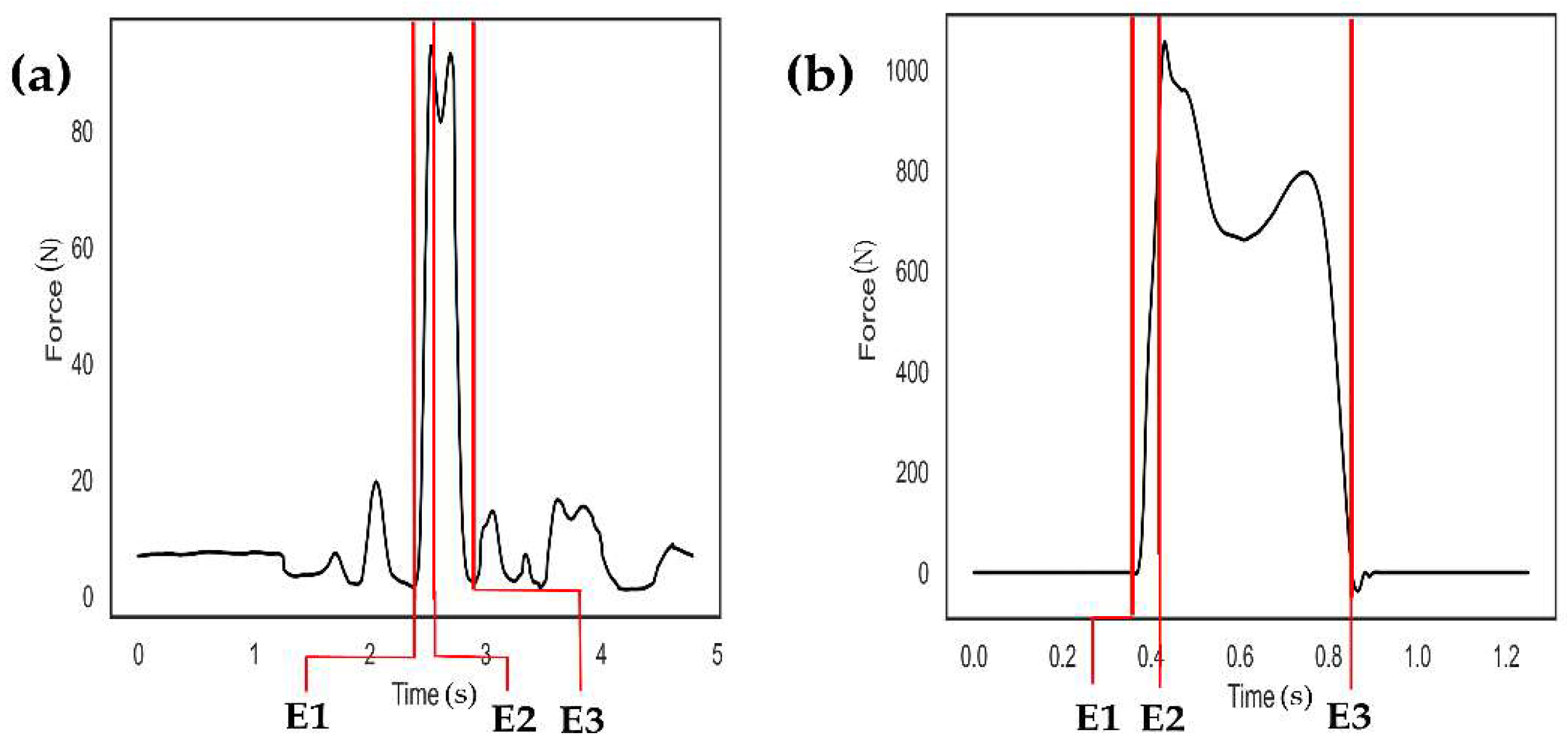
2.4. Data Acquisition
2.5. Statistical Analysis
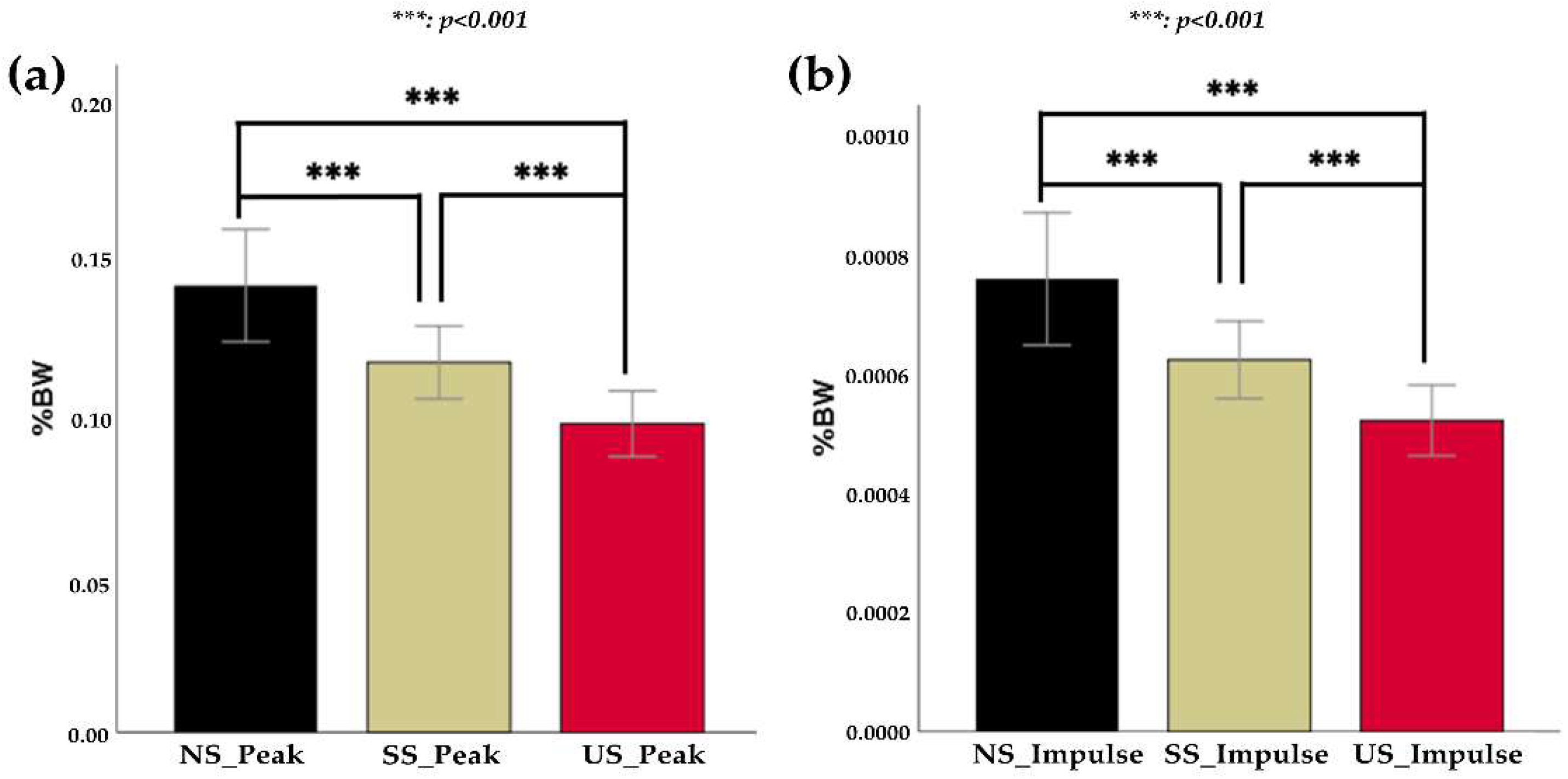
3. Results
4. Discussion
4.1. Forces Applied to the Shoe Upper Can Be Used to Quantify the Non-Slip Function of Socks
4.2. Using Pressure Sensors May Be an Affordable Option to Measure the Non-Slip Function of Socks with Less Effects of Skin Movement and Upper Elasticity Changes
4.3. Study Limitations and Future Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Phillips, P.; Evans, A.; Popplewell, P. Diabetic Foot Ulcers. Am. J. Clin. Dermatol. 2000, 1, 117–123. [Google Scholar] [CrossRef] [PubMed]
- Delporte, C. New socks offer relief, blister guard system with Teflon reduces friction between foot and sock. Am. Text. Int. 1997, 26, K-A. [Google Scholar]
- Stacoff, A.; Steger, J.; Stuessi, E.; Reinschmidt, C. Lateral stability in sideward cutting movements. Med. Sci. Sports Exerc. 1996, 28, 350–358. [Google Scholar] [PubMed]
- Apps, C.; Dawson, L.; Shering, B.; Siegkas, P. Grip socks improve slalom course performance and reduce in-shoe foot displacement of the forefoot in male and female sports players. J. Sports Sci. 2022, 40, 1351–1359. [Google Scholar] [CrossRef] [PubMed]
- Cong, Y.; Lam, W.K.; Cheung, J.T.-M.; Zhang, M. In-shoe plantar tri-axial stress profiles during maximum-effort cutting maneuvers. J. Biomech. 2014, 47, 3799–3806. [Google Scholar] [CrossRef] [PubMed]
- Van Amber, R.R.; Lowe, B.J.; Niven, B.E.; Laing, R.M.; Wilson, C.A.; Collie, S. The effect of fiber type, yarn structure and fabric structure on the frictional characteristics of sock fabrics. Text. Res. J. 2015, 85, 115–127. [Google Scholar] [CrossRef]
- Chaffin, D.B.; Woldstad, J.C.; Trujillo, A. Floor/shoe slip resistance measurement. Am. Ind. Hyg. Assoc. J. 1992, 53, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Kalebek, N.A.; Babaarslan, O. Effect of weight and apllied force on the friction coefficient of the spunlace nonwoven fabrics. Fibers Polym. 2010, 11, 277–284. [Google Scholar] [CrossRef]
- Carré, M.; Tasron, D.; Lewis, R.; Hashmi, F. Investigating foot-sock friction: A comparison of two different methodologies. Procedia Eng. 2016, 147, 759–764. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, S.; Karaman, C. Skin-Fabric Friction and Other Performance Characteristics of Socks Fabrics Produced from Cellulosic Fibers. Text. Appar. 2018, 28, 213–220. [Google Scholar]
- Ali, W.Y. Friction behaviour of Bare Foot and Foot Wearing Socks Sliding against Marble Flooring Tiles. JKAU Eng. Sci. 2010, 21, 83–104. [Google Scholar] [CrossRef]
- D’Souza, B.; Kasar, A.K.; Jones, J.; Skeete, A.; Rader, L.; Kumar, P.; Menezes, P.L. A Brief Review on Factors Affecting the Tribological Interaction between Human Skin and Different Textile Materials. Materials 2022, 15, 2184. [Google Scholar] [CrossRef] [PubMed]
- Eun, J.; Ryue, J.; Park, S.; Lee, K. A Novel Method to Measure the Static Coefficient of Friction for Socks. Sensors 2022, 22, 5525. [Google Scholar] [CrossRef] [PubMed]
- Sanders, J.E.; Greve, J.M.; Mitchell, S.B.; Zachariah, S.G. Material properties of commonly-used interface materials and their static coefficients of friction with skin and socks. J. Rehabil. Res. Dev. 1998, 35, 161–176. [Google Scholar] [PubMed]
- Apps, C.; Rodrigues, P.; Isherwood, J.; Lake, M. Footwear insoles with higher frictional properties enhance performance by reducing in-shoe sliding during rapid changes of direction. J. Sports Sci. 2020, 38, 206–213. [Google Scholar] [CrossRef] [PubMed]
- Reinschmidt, C.; Stacoff, A.; Stüssi, E. Heel movement within a court shoe. Med. Sci. Sports Exerc. 1992, 24, 1390–1395. [Google Scholar] [CrossRef] [PubMed]
- Shultz, R.; Jenkyn, T. Determining the maximum diameter for holes in the shoe without compromising shoe integrity when using a multi-segment foot model. Med. Eng. Phys. 2012, 34, 118–122. [Google Scholar] [CrossRef] [PubMed]
- Myers, C.A.; Allen, W.; Laz, P.J.; Lawler-Schwartz, J.; Conrad, B.P. The impact of self-lacing technology on foot containment during dynamic cutting. Footwear Sci. 2022, 14, 94–102. [Google Scholar] [CrossRef]
- Morin, J.-B.; Edouard, P.; Samozino, P. Technical ability of force application as a determinant factor of sprint performance. Med. Sci. Sport. Exerc. 2011, 43, 1680–1688. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NS | SS | US | |
|---|---|---|---|
| Time | r = 0.301 | r = 0.002 | r = −0.045 |
| p = 0.025 ** | p = 0.989 | p = 0.746 | |
| Peak | r = 0.121 | r = 0.057 | r = −0.133 |
| p = 0.377 | p = 0.679 | p = 0.331 | |
| Impulse | r = −0.46 | r = −0.179 | r = 0.025 |
| p = 0.739 | p = 0.191 | p = 0.854 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, D.; Eun, J.; Yu, Y.; Park, S.; Lee, K. A Method for Accessing the Non-Slip Function of Socks in an Acute Maneuver. Sensors 2023, 23, 1378. https://doi.org/10.3390/s23031378
Seo D, Eun J, Yu Y, Park S, Lee K. A Method for Accessing the Non-Slip Function of Socks in an Acute Maneuver. Sensors. 2023; 23(3):1378. https://doi.org/10.3390/s23031378
Chicago/Turabian StyleSeo, Dongwook, Jinsu Eun, Yeonwoo Yu, Sangsoo Park, and Kikwang Lee. 2023. "A Method for Accessing the Non-Slip Function of Socks in an Acute Maneuver" Sensors 23, no. 3: 1378. https://doi.org/10.3390/s23031378