1. Introduction
Many studies have proved the existence of a direct link between exposure to air pollutants and issues concerning public health or climate change [
1,
2,
3,
4,
5]. Air quality monitoring is controlled by national regulations, and the equipment required to meet the standards established by such regulations is characterized by high costs due to purchasing, maintenance, and logistical issues [
6,
7,
8,
9,
10,
11]. For this reason, in many cases, fixed monitoring station networks of governmental agencies feature few nodes that are sparsely deployed across the territory. As a consequence, it is not often possible to obtain pollutant maps with an adequate spatio-temporal resolution [
9,
12].
In recent years, an appealing solution to this issue has been represented by the rising of air quality monitors based on low-cost sensors [
10,
11,
12]. A remarkable number of research institutions and companies have started to design, produce, and test a huge variety of sensors not only for pollutant gas and particulate matter monitoring [
10,
11,
13], but also for malodor detection [
14,
15]. The use of low-cost sensors (LCSs) or low-cost monitors (LCMs) based on LCSs for air quality monitoring has been investigated and explored by several studies reporting interesting potentialities, but also substantial limitations and caveats [
9,
10,
11,
12,
13,
16,
17,
18,
19].
The technologies featuring LCSs and LCMs provide devices that are ten or more times cheaper than the regulatory instrumentation [
9,
11], but their data quality is questionable [
9,
11,
17,
19]; additionally, the performance information provided by the manufacturers of LCMs/LCSs is limited in most cases. Several studies have already addressed this issue, and various strategies have been explored to improve LCS or LCM performance. These range from the employment of sensor arrays [
20] to the use of various data elaboration algorithms, such as multilinear regression or artificial neural networks [
9,
11,
20,
21]. The process of improving the performance of these devices by post-processing their data is commonly termed calibration.
Several studies suggest that it is preferable to evaluate or calibrate the performance of such devices in the environment of their final deployment (more concisely, “on-field”), which could be an outdoor site or an indoor space [
9,
11,
13,
16,
18,
19,
21]. The on-field evaluation or calibration of LCSs or LCMs is performed by co-locating the device under test with reference instrumentation featuring higher standards of accuracy and precision [
11].
The performance of the devices under test can be assessed through indicators calculated utilizing the data provided by the reference instrumentation and the data of the devices under evaluation or calibration. We found that the most commonly used indicators in studies concerning LCS/LCM evaluation or calibration were the coefficient of determination (R2), the root mean squared error (RMSE), the mean absolute error (MAE), the mean normalized bias (MNB), and the coefficient of variation (CV). The R2 indicator describes how well the LCM/LCS correlates with the reference device; it ranges from 0 to 1. Values close to 0 indicate poor performance, while values close to 1 show a good agreement between the device under test and the reference device. RMSE, MAE, and MNB are indicators related to the extent of the error between the measurements of the LCM/LCS and the measurements of the reference device; values close to 0 represent a good performance. The coefficient of variation (CV) is used to describe the extent of the variation displayed in the measurements provided by several samples of the same LCM/LCS model under evaluation; values close to 0 indicate a good level of consistency for the model.
The study described in this manuscript focused on the evaluation of the performance of two LCS models designed for measuring particulate matter (PM) concentrations and their application areas. PM is an air pollutant composed of microscopic particles whose aerodynamic diameter is less than or equal to 10 µm, in the case of PM10, or less than or equal to 2.5 µm or 1 µm, in the case of PM2.5 and PM1, respectively.
The present manuscript is organized as follows. In
Section 2, an overview of previous related works is presented together with an overall description of this study.
Section 3 provides some necessary background information that is useful to fully understand some fundamental aspects of this research. The materials and methods used to perform this study are reported in
Section 4, while the results are shown in
Section 5. A detailed discussion of the results can be found in
Section 6. The findings presented in this penultimate section led to the conclusions summarized in
Section 7 of this article.
2. Related Works and Study Description
Although in recent years, several studies concerning the evaluation/calibration of PM sensors already available on the market have been conducted, it is quite difficult to compare their results due to the remarkable heterogeneity of conditions under which they were performed. By reading the scientific literature, it was found that they differed in terms of the test environment (outdoor, indoor, or in a laboratory test chamber), reference instrumentation used, performance indicators, dataset structures (e.g., data grouped by hourly or daily means), and test duration. All these aforementioned factors directly affected the quantification of the performance, and this element was the origin of the difficulties in comparing the results, even though we considered studies that used identical indicators.
Gao et. al. [
22] evaluated the performance of a Shinyei sensor measuring PM
2.5 during a 4-day test performed in an outdoor environment, concluding that it correlated better with optical reference instruments (R
2 = 0.86–0.89) than with gravimetric ones (R
2 = 0.53). Vogt, Castell, et al. [
23] carried out a performance evaluation of the PMS5003, SPS30, and OPC-N3 sensors through an outdoor test that lasted 7 weeks by using optical and gravimetric reference instruments. They found that in the case of PM
2.5, the sensors showed a good performance in terms of the coefficient of determination (R
2 = 0.7–0.9), while they performed worse for PM
10 measurements (R
2 = 0.6–0.7). Kosmopoulos, Kazantzidis, et al. [
24] evaluated and calibrated a PMS5003 sensor integrated into an LCM called PurpleAir-PA II by performing an experiment that lasted 18 months. In this experiment, the authors gathered data representing hourly measurements provided by the LCM and an optical counter as a reference, reporting R
2 = 0.81 for PM
1, R
2 = 0.56 for PM
2.5, and R
2 < 0.37 for PM
10. Masic et al. [
25] evaluated the PMS5003 and OPC-N2 sensors through a test carried out in a heavily polluted outdoor environment. They showed that by considering daily averaged measurements, the sensors correlated well with the reference (R
2 = 0.9–0.95), even though the MAE ranged between 29.4 µg/m
3 and 55.2 µg/m
3.
Other works [
26,
27,
28] have explored the potentialities and limits of various PM sensor models by applying them in different scenarios.
Evaluations of a notable variety of LCSs/LCMs for PM concentration measurements can be found in the AQ-SPEC program [
18]. This study has remarkable importance not only for the number of different LCM/LCS models investigated, but also because they were all evaluated under the same conditions. In this work, the devices under test were compared on-field or in the laboratory with different types of reference device: beta attenuation monitors and optical counters. The duration of the evaluation period was fixed at roughly two months for every device tested, and the data gathered were grouped into 5 min, hourly, and daily means. The indicators used for the evaluations were the coefficient of determination (R
2) and the coefficient of variation (CV).
The study presented in this manuscript was performed under similar conditions: two copies of two different PM sensor models (PMS5003, produced by Plantower, and SPS30, produced by Sensirion [
29,
30]) were evaluated on-field through a test that lasted roughly two months. The purpose of our study was to understand the potential uses, or application areas, of these PM sensors presenting a good price–quality ratio. To accomplish this task, we took as a reference the Williams et al. [
19] report published by the U.S. Environmental Protection Agency (EPA). In this report, the potential uses of LCSs were classified on the basis of certain performance indicators, more precisely, the MNB and CV [
13,
19]. In particular, we investigated if the PM sensors could be used for supplemental monitoring to complement the existing fixed PM stations of the local government environmental protection agency named ARPA Puglia [
31]. As indicated in the EPA report [
19], if the sensor performance presents a variance and a bias error of less than 20% (CV and MNB) and a data completeness greater than 80%, the devices can be reliably used as a supplemental monitoring tool for improving the spatial resolution of the pollutant concentration maps produced by ARPA Puglia [
32]. As seen in previous works [
18,
23], the reference instrumentation used for evaluating the LCSs/LCMs directly affects the indicator performance; moreover, SPS30 and PMS5003 have already been evaluated in the AQ-SPEC program [
18] using beta attenuation monitors and optical counters as a reference. Considering these factors, we judged it important to use the gravimetric measurements provided by ARPA Puglia in order to understand the possibility of employing these PM sensors to complement ARPA Puglia data. These considerations, in addition to the fact that the MNB of the sensors was not calculated in the AQ-SPEC project [
18], led to the design of the experiment hereafter described.
3. Background
As mentioned earlier, the conditions characterizing the assessment or the calibration of the LCSs/LCMs are very important for their final evaluation. The test environment is the most influential factor. In general, LCMs or LCSs evaluated or calibrated in a laboratory test chamber show better performance in comparison with devices evaluated or calibrated on-field. This is because the environmental variables typical of real-world scenarios, which negatively affect LCM/LCS performance, are hard to reproduce in a laboratory test chamber. Other relevant factors weighing on their performance quantification are the type of data grouping, the instrumentation used as a reference, the duration of the evaluation period, the range of the pollutant concentrations, and the performance indicators adopted. As already mentioned, there is no commonly accepted procedure used to perform LCM/LCS evaluations or calibrations. In this respect, the EPA guidelines tried to standardize these processes by proposing a minimum set of rules to allow a better comparison of LCS/LCM performance. In particular, they proposed the adoption of the CV and MNB indicators to provide reliable information about the optimal use of LCSs/LCMs.
Therefore, in order to assess the possible uses of the sensors following the approach indicated in the EPA report [
19], the MNB and CV indicators were calculated for each sensor model. In addition to these, the coefficient of determination (R
2), RMSE, and MAE were also computed for each copy of the sensors to allow a comparison with previous studies where the same sensors were evaluated or calibrated. R
2, MAE, MNB, RMSE, and CV are performance indicators defined as follows (see also [
9,
13,
21,
23,
33]):
where
is the
ith measurement of the reference,
is the
ith reading of the sensor, N is the total number of observations,
is the average of the sensor readings, and
is the average of the reference measurements. Concerning the CV and MNB formulas,
represents the
ith reading of the sensor of the
jth copy of the sensor model, while
M is the number of copies for each sensor model, which was equal to two in our case.
The classification of the LCS/LCM uses, or application areas, proposed by the EPA features five tiers (Tier I–Tier V), presented in
Table 1, which depend on the pollutant considered, the MNB and CV values.
Once the CV and MNB have been computed for a sensor model, it is possible to determine the optimal “tier”, or application area, of the LCM/LCS. The conditions necessary to assign an LCS/LCM model to a tier are determined by the “AND” logic operation for the ranges of the MNB and CV values indicated in
Table 1. Thus, as an example, an LCM/LCS model belonging to Tier IV must demonstrate both −0.3 < MNB < 0.3 and CV < 0.3.
4. Materials and Methods
The LCSs available on the market for air quality monitoring are devices able to measure pollutant concentrations using different technologies and working principles. Nonetheless, aside from the sensor type and technology used, these devices need appropriate electronic boards for their effective use. The electronic circuitry of these boards converts the current or the voltage output of the sensing element, dependent on the pollutant concentration, into an electronic signal available at the output interface. These sensors can present various types of interfaces, the most common being: analog, TTL serial, I2C, and USB. To effectively make use of the data produced by the sensors, it is required a suitable electronic system capable of reading the signals coming out of the output interfaces and converting them into usable data. The overall electronic system in charge of accomplishing this task is commonly called a low-cost monitor (LCM).
The PM sensors evaluated in this work were integrated into the SentinAir platform [
34] designed to act as both a tool for quickly performing evaluations/calibrations of LCSs and an LCM for indoor or outdoor environments [
21,
35,
36,
37]. The SentinAir system is an in-house and open-source design implemented in the ENEA research center of Brindisi, located in the Puglia region of Italy. Therefore, all the materials, software, and procedures required to build a copy of SentinAir are available online on the project repository webpage [
34].
The main difference between the SentinAir system and the other commercially available LCMs is represented by the possibility of integrating, or installing, a huge variety of sensors presenting any of the earlier mentioned output interfaces and produced by various manufacturers. This capability was achieved thanks to the adoption of the low-cost micro-computer Raspberry 3B+ [
38] as the core of the system and the software created for the operation of SentinAir. As a matter of fact, the Raspberry 3B+ hardware is characterized by four USB ports, an I2C bus, and a TTL serial port, while a driver software for the installation of an analog-to-digital converter (ADC) was designed and implemented to allow the use of the ADCPi board by ABelectronics [
39]. This electronic board is necessary for the use of the LCSs with an analog output interface. A software system composed of drivers written in the Python language [
40] specific to each device or sensor installable in SentinAir provides the “plug-and-play” feature for the system. Another very useful feature of SentinAir consists in its ability to be remotely operated through its dual wireless communication system: a WiFi channel and an internet connection via a USB modem.
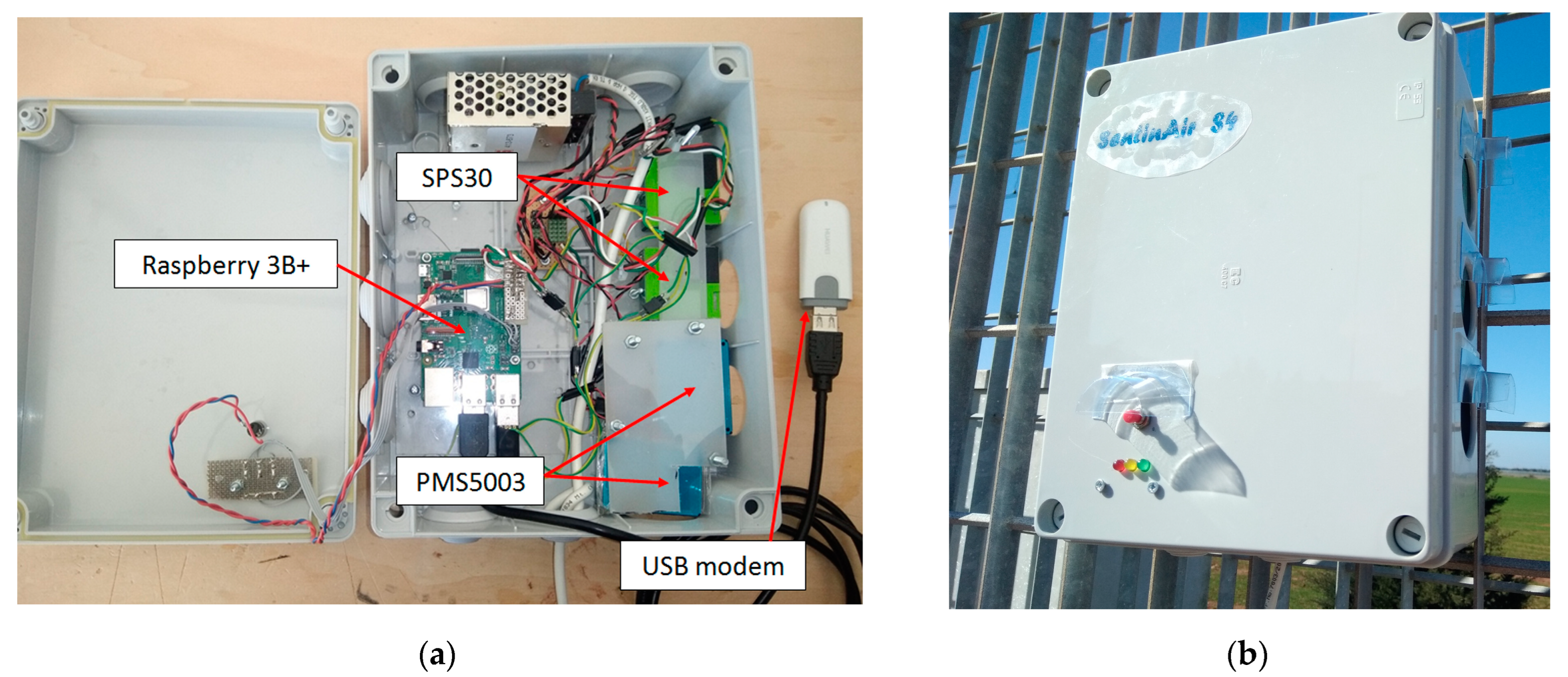
The SentinAir device used for the test acted as an LCM containing two copies of the PMS5003 sensor model and two copies of the SPS30 model, as illustrated in
Figure 1. The LCSs used in this experiment were particle optical counters available on the market, whose hardware was contained in a compact case, as shown in
Figure 2.
Their working principle is illustrated in
Figure 3. It is based on a laser beam scattered by the particles entering a detection camera. The more particles cross the laser beam, the more scattered the beam becomes. The beam is detected by a light detector that provides an electronic signal depending on the scattering level of the laser light. Thus, the microprocessor inside the sensor is devoted to translating the electronic signal of the detector into numbers of particles per volume unit. Therefore, an algorithm implemented in the sensor microprocessor provides the PM concentration depending on the number of particles detected. Unfortunately, the manufacturers do not provide details about this algorithm. Concerning the output interface, these LCSs are provided with a serial TTL interface in the case of the PMS5003 sensor, and an I2C or a serial TTL interface in the case of the SPS30 sensor. By connecting the LCM hardware through these interfaces, measurements related to PM
10, PM
2.5, and PM
1 (and, in the case of SPS30, also PM
4) concentrations can be read. More details about these LCSs can be found by downloading the datasheets from the manufacturer’s websites [
29,
30].
Other LCMs similar to SentinAir are currently available on the market. These are all based on LCSs whose working principle follows the simplified scheme depicted in
Figure 3. An estimation of their costs is provided in
Table 2, where some examples of both LCMs and LCSs for PM measurements are listed.
The experiment designed to assess the potential uses of these sensors consisted in placing a SentinAir device near the ARPA Puglia fixed monitoring station located in the town of Mesagne (Italy), as shown in
Figure 4.
The reference used for the evaluation was the ARPA Puglia monitoring station located in Via Udine, which is devoted to measuring the background concentrations of PM
10 in a suburban environment. It performs the measurements using gravimetric instruments and provides data concerning the daily means of this pollutant that are freely downloadable from the ARPA website [
32].
Data elaboration and indicator computations were performed using the Scikit-learn libraries written in the Python language [
41,
42,
43], which are an open-source software freely downloadable from their website [
41]. The sensor data were read by the SentinAir device every 5 min, and, subsequently, daily means were computed for building the database together with the ARPA data. Italian rules for PM monitoring require just the monitoring of PM
10 on a daily average basis and yearly averages for PM
2.5; for this reason, the useful data provided by the fixed reference station were only those related to the daily averages of PM
10. The SentinAir system can store the data related to the performed measurements on its internal SD card memory; moreover, it features a web server from which the user can download any data measured by the device thanks to the presence of a USB modem [
35,
36,
37]. The data gathered by the SentinAir device were periodically downloaded and joined with the ARPA measurements that are publicly available on the ARPA website [
32]. Starting from the daily averages of the ARPA monitoring station and the daily averages computed by the LCM, it was possible to assess the LCS uses related to PM
10 monitoring by considering the MNB and CV values computed for each sensor model according to the EPA guidelines [
13,
19].
The performance of PM sensors is negatively affected by the environmental relative humidity [
44,
45]. The reason for this effect is the condensation of water vapor that makes the aerosol particles comprising the particulate matter grow hygroscopically. This phenomenon causes incorrect measurements in devices based on the optical counter working principle, such as the PM sensors considered in this experiment. Some studies [
44,
45] have proposed an algorithm to take into account the negative effect of humidity in order to improve sensor performance. This algorithm consists in applying a correction factor to the sensor readings, as indicated by the following formulas:
where
RH is the relative humidity, and “
k” is a parameter depending on the nature of the particulate matter. To have a complete view of the capabilities of the sensors considered in our investigation, we applied the correction algorithm illustrated above to understand the extent to which the performance of the sensors could be improved. However, in our experiment, no information could be collected on the composition of
PM compounds; therefore, we selected two distinct values (
k = 0.5 and
k = 0.62), as suggested in the works of Crilley [
44] and Di Antonio [
45]. In the first study, it was stated that the expected range of the “
k” parameter could be reasonably thought to be 0.48–0.51 for PM
10, while the second study hypothesized that the “
k” value could be set equal to 0.62 in the case of a mixture of organic and inorganic compounds, such as in a typical polluted urban environment.
6. Discussion
6.1. Analysis of Results
The results concerning the performance of the models evaluated in this study can be better understood by comparing them with the data found in previous, similar works. We mentioned earlier that a comparison with several existing studies was not an easy task due to the different conditions surrounding the various experiments and the different metrics used for assessing the LCM/LCS performance. Nevertheless, we selected two such studies with very similar characteristics to the present experiment.
In their research, Vogt and Castell [
23] performed an on-field evaluation of three LCM models. Two of the devices under evaluation were the Ensense and the Airly LCM model, commercially available at the current date. The operation of the Ensense model is based on the PMS5003 sensor, while the Airly monitor uses an SPS30 sensor. The duration of their research (53 days) was shorter than the one of the experiment described in the present study, but similar to it. They assessed the performance of the LCMs using gravimetric and optical reference instrumentations and by considering the hourly and daily averages of the measurements. In
Table 6, the results related to the sensors involved in the present study are compared with the results from Vogt and Castell’s study by considering only the daily averages.
In the same table, the performance indicators determined by the AQ-SPEC program [
18] are presented for comparison with this research. In this work, a notable number of LCMs and LCSs were evaluated on-field using both optical and beta-attenuator reference instrumentations. The assessment of the devices was performed by considering 5 min, hourly, and daily averages; however, in accordance with the present study, only the results related to the daily averages are summarized. Another element in common with the present work characterizing the AQ-SPEC program was the duration of the LCS/LCM tests, which was roughly equal to two months for each device under evaluation.
By inspecting the table above, one can note a marked heterogeneity in the values of almost all the indicators related to the same sensor model. The reasons for these wide ranges are ascribed to various factors, mainly, different reference types, and PM concentration ranges used in the evaluations. The table also shows that data completeness could be found only for the R2, slope, and bias parameters.
If we consider the LCMs using the SPS30 sensor separately from those employing the PMS5003 model, we can see that the ranges of R2 were 0.18–0.9, and 0.06–0.89, respectively. Therefore, the values found in this work for PMS5003 (R2 = 0.61) and SPS30 (R2 = 0.55–0.57) indicate better performance in relation to the median value of R2 found by the previous studies (R2 = 0.41 for PMS5003 and R2 = 0.36 for SPS30).
Table 6 also indicates that the ranges of the RMSE for SPS30 and PMS5003 were, respectively, 1.92–9.47 µg/m
3 and 3.79–35.3 µg/m
3. If we compare these ranges with the data found in this experiment (RMSE = 9.19–9.47 µg/m
3 for SPS30, RMSE = 11.63–12.09 µg/m
3 for PMS5003), we can note that the SPS30 displayed a worse performance, even though it has to be said that there was just one record in the table to compare it with; meanwhile, in the case of the other sensor model, the RMSE values were placed in the middle of the range found by the previous studies.
The other indicator presenting a completeness of data was the slope of the linear fit (see also
Figure 6). As shown in
Table 6, the ranges were equal to 0.26–1.61 for the SPS30 model and 0.64–3.38 for the PMS5003 model. In this regard, by considering that the ranges found in this study were, respectively, 0.59–0.60 and 1.38–1.41 for the SPS30 and PMS5003 models, we could conclude that the SPS30 model evaluated in this study showed lower slopes with respect to the overall median value (equal to 0.93), while the PMS5003 model was characterized by slopes more in line with the overall median value (equal to 1.37).
The coefficient of variation (CV) is the indicator that provides quantitative information about the consistency of the sensors or devices belonging to the same model. The values found by this work (1.96% for PMS5003 and 2.76% for SPS30) were much lower than the maximum CV found by the previous study (equal to 5.8% for PMS5003 and 11% for SPS30).
Unfortunately, we could not find MAE values for the SPS30 sensor in any previous works, but in the case of the PMS5003 model, they ranged from 9.3 µg/m3 to 32.6 µg/m3. Thus, the PMS5003 model evaluated in this study showed a better performance in terms of MAE values.
As shown in
Table 1 and
Table 4, the PMS5003 model featured an MNB of 0.14 and a CV of 1.96%, which fall in the range of the values characterizing Tier III. Thus, according to the classification proposed by the EPA guidelines, this sensor model can be used for supplemental monitoring to complete the data provided by the regulatory monitoring network and achieve a better spatio-temporal resolution for pollutant maps. In the case of the SPS30 model, we found that it presented an MNB of 0.44 and a CV of 2.76%, which assigned this model to Tier I. The possible uses of this sensor model are therefore related to the informal indication of pollutant presence.
6.2. EPA Guidelines Limits
The guidelines proposed by the EPA offer a practical tool that is useful for supporting the understanding of the most appropriate use, or application area, of an LCS or LCM, especially considering that the performance indicators related to the same sensor can present a wide range of values, as can be found in
Table 6. The algorithm responsible for the “tier” selection proposed in the guidelines is based on the computation of the MNB and the CV. The first parameter takes into account the measurement discrepancies between the device under evaluation and the reference, while the CV provides a quantification of the consistency of the devices. Both these parameters are expressed by non-dimensional values, preserving the generality of the guidelines.
However, it can also be noted that the decision process for the selection of the different “tiers” lacks an indicator through which the grade of the correlation of the device with the reference is taken into account. This suggests that the addition of such an indicator to the mechanism at the basis of the tier selection could improve the effectiveness of the guidelines. The most suitable candidates could be the R2 and the slope of the linear fit line, because they are both non-dimensional parameters.
Nevertheless, a more detailed analysis of these indicators showed that the coefficient of determination (R
2) depends on the range of reference measurements and the duration of the on-field evaluation. In particular, the wider the range of the pollutant concentration values registered by the reference device, the higher the probability of obtaining R
2 values close to unity [
11] is. This suggests that the selection of the slope of the linear fit line (see
Figure 6) could be an additional indicator to use together with the MNB and the CV for “tiers” determination, but such a decision must be corroborated by targeted, detailed studies, which was beyond the limits of this work. Another limit of this research was the number of LCSs evaluated, the type of reference device considered, and the temporal frequency of the records comprising the measurement database (e.g., 5min, daily, or hourly averages). More specifically, this preliminary investigation performed an evaluation on the basis of daily averages but did not clarify if the application area (“tier”) of the evaluated sensors may be assigned to different “tiers” by changing the temporal average of the measurements (e.g., by considering hourly averages) or by changing the reference type.
7. Conclusions
The EPA guidelines offer a useful tool for assessing the most suitable application area, or use, of an LCS/LCM for air quality monitoring. To the best of our knowledge, until now, the performance of the PM sensor models considered in this work had not been analyzed in light of the EPA guidelines by other studies. Therefore, the SPS30 sensor produced by Sensirion and the PMS5003 sensor produced by Plantower were tested in this study using the SentinAir device as a LCM. Their performance in measuring PM10 concentrations was evaluated through an on-field test using a gravimetric reference providing daily averages of PM10.
We found that including the effects of the humidity by applying a correction algorithm proposed in previous works could improve the performance of the PMS5003 sensor models. We also found that, as prescribed by the guidelines, considering the MNB and CV indicators, the PMS5003 sensor could be used for supplementing regulatory monitoring networks, while the SPS30 sensor could be used to provide informal information about the presence of pollutants. However, even though the EPA guidelines represent without a doubt an efficient tool to guide the user through the jungle of the low-cost devices for air quality monitoring available on the market, we found that some improvements to the selection criteria characterizing the guidelines are necessary.
In our opinion, adding an indicator that takes into account the grade of correlation between the reference and the device under evaluation could make the guidelines more efficient in providing indications about the most appropriate application area. However, a rigorous analysis to confirm this aspect could represent a matter for future studies.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}