
Structural Design and Parameter Optimization of Magnetic Gradient Tensor Measurement System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Magnetic Gradient Tensor Measurement System
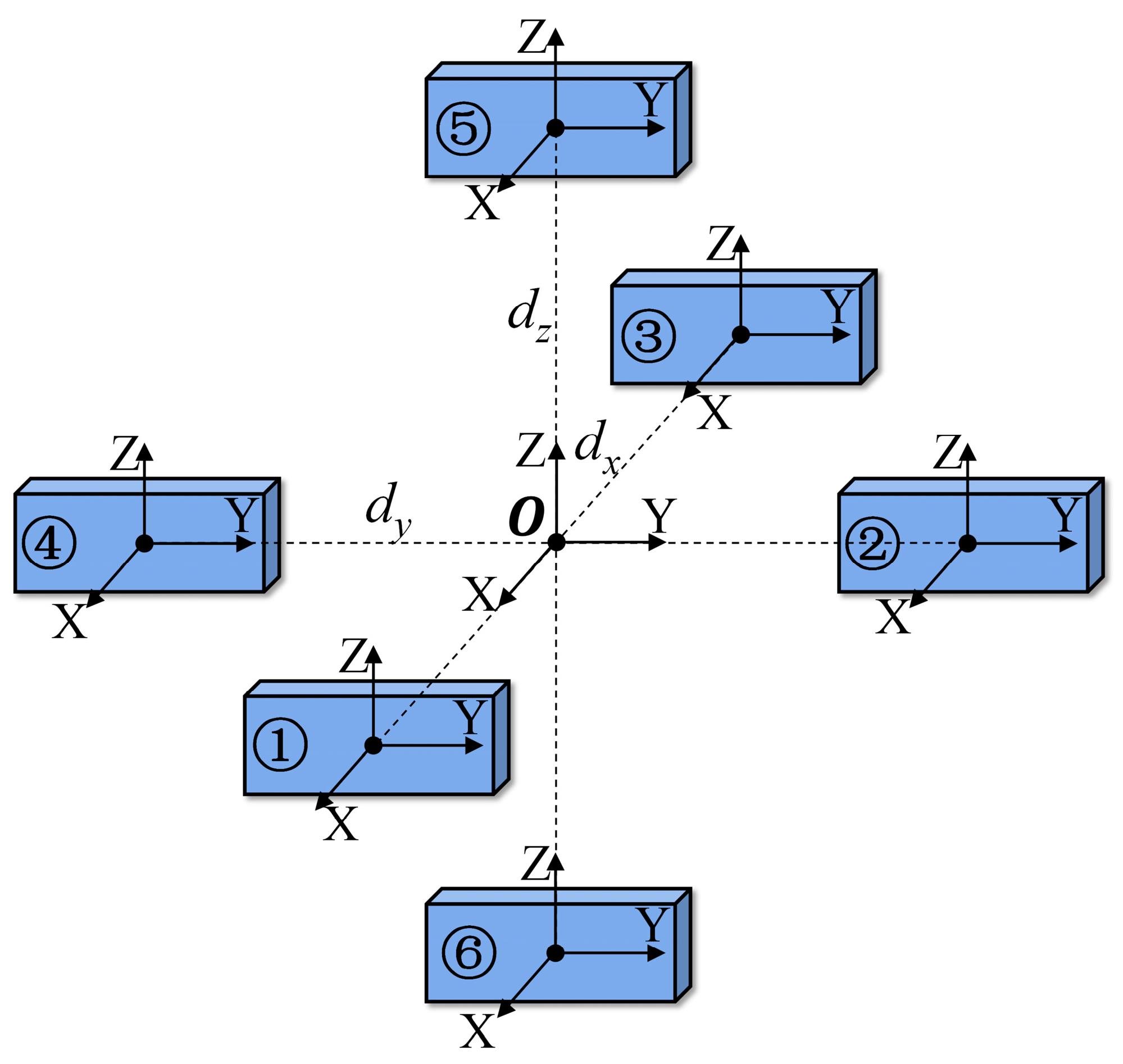
2.1. Design of Sensor Array Structure
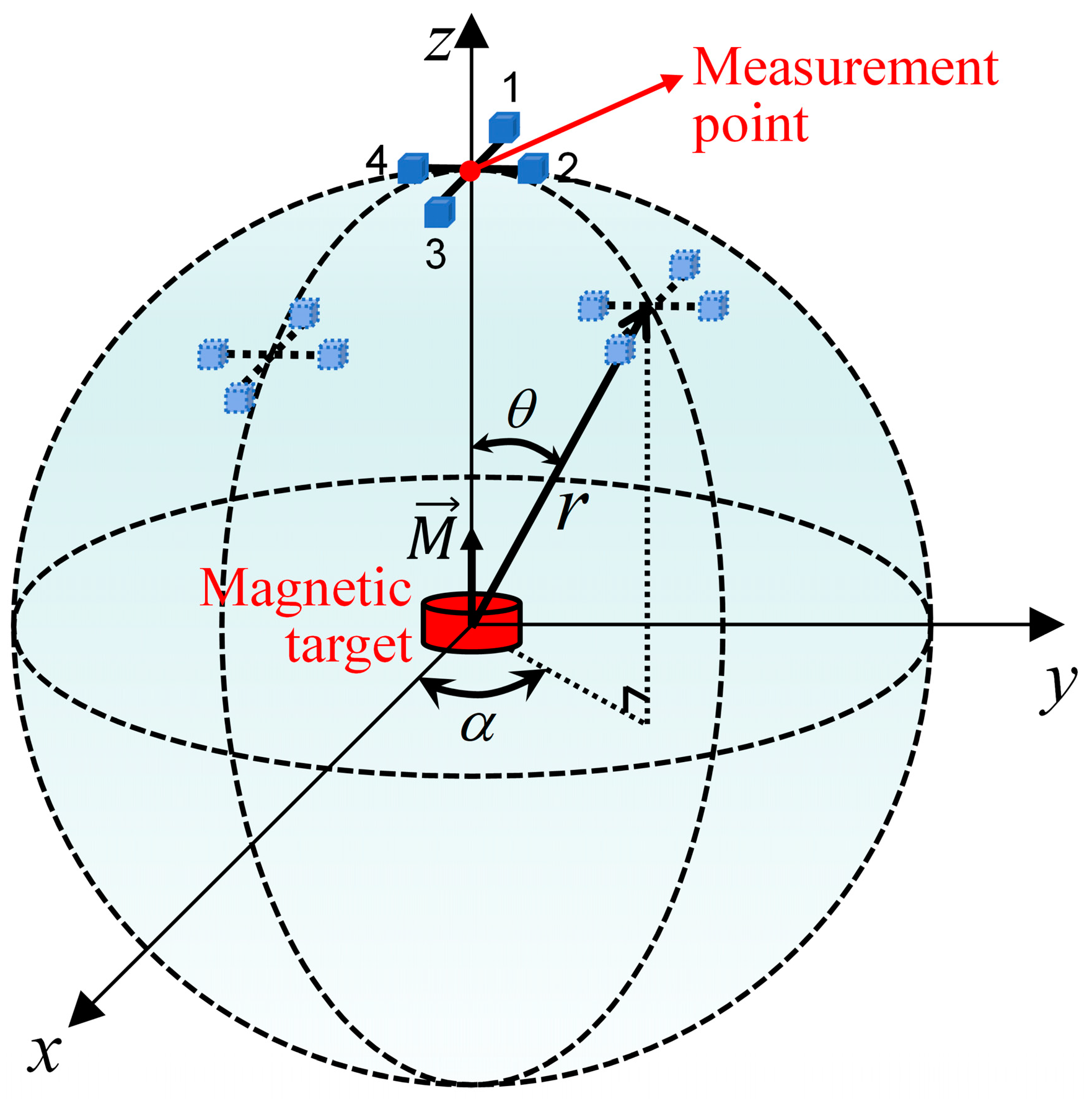
2.2. Selection of Baseline Distance
3. Simulation
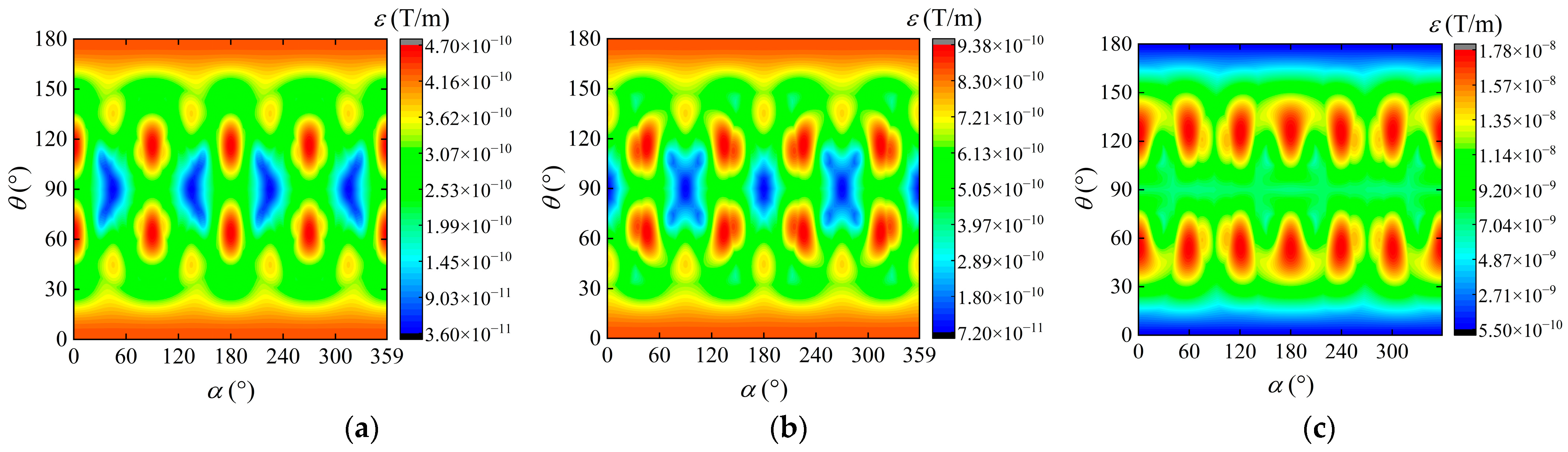
3.1. Determination of Optimal Array Structure
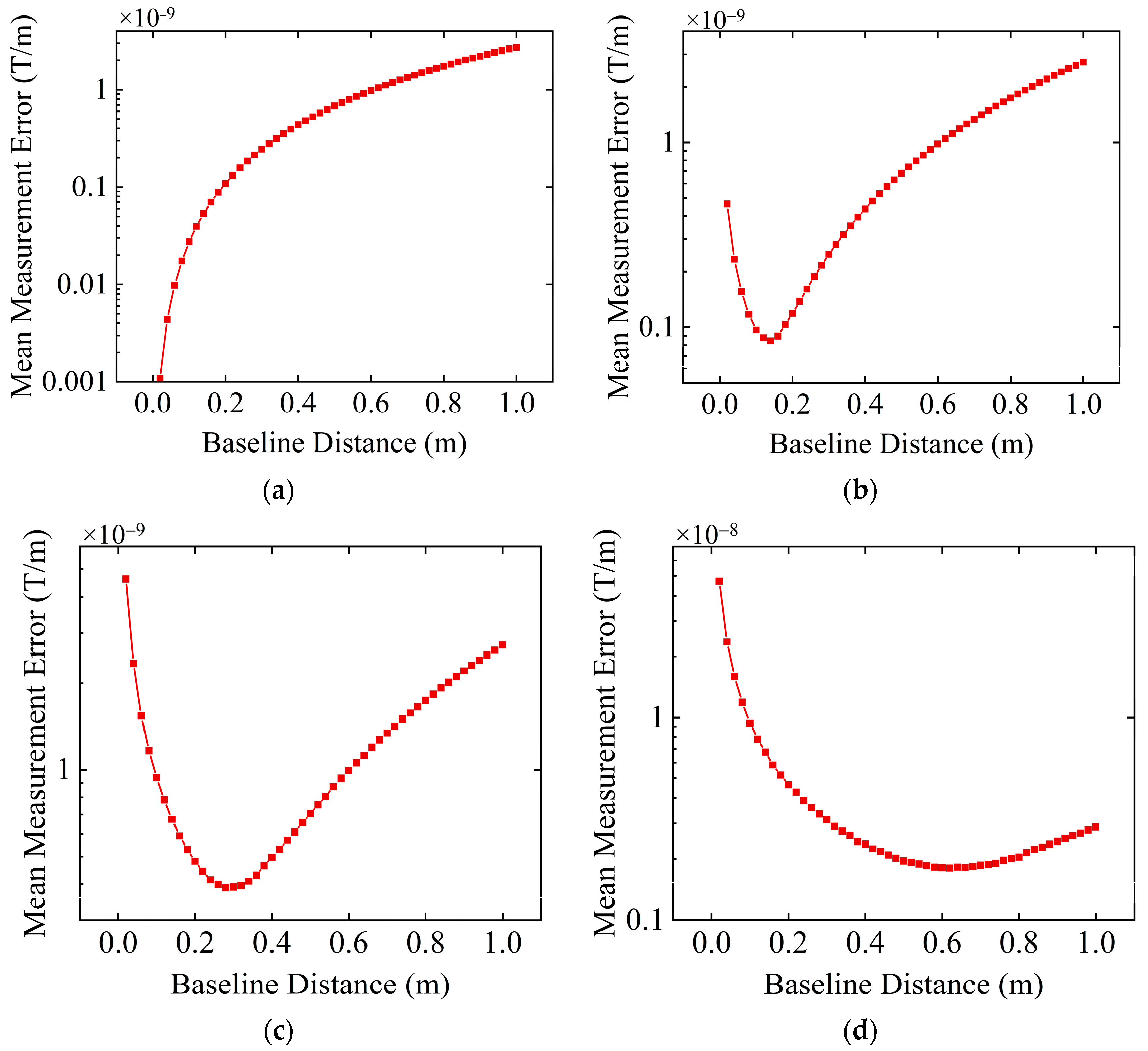
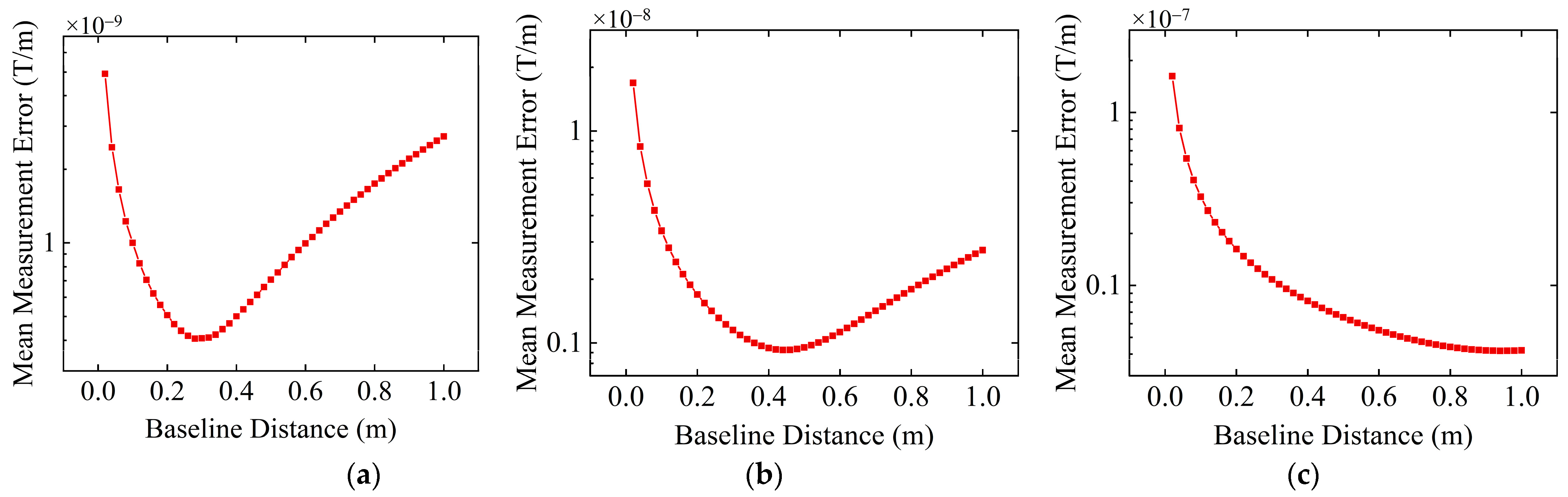
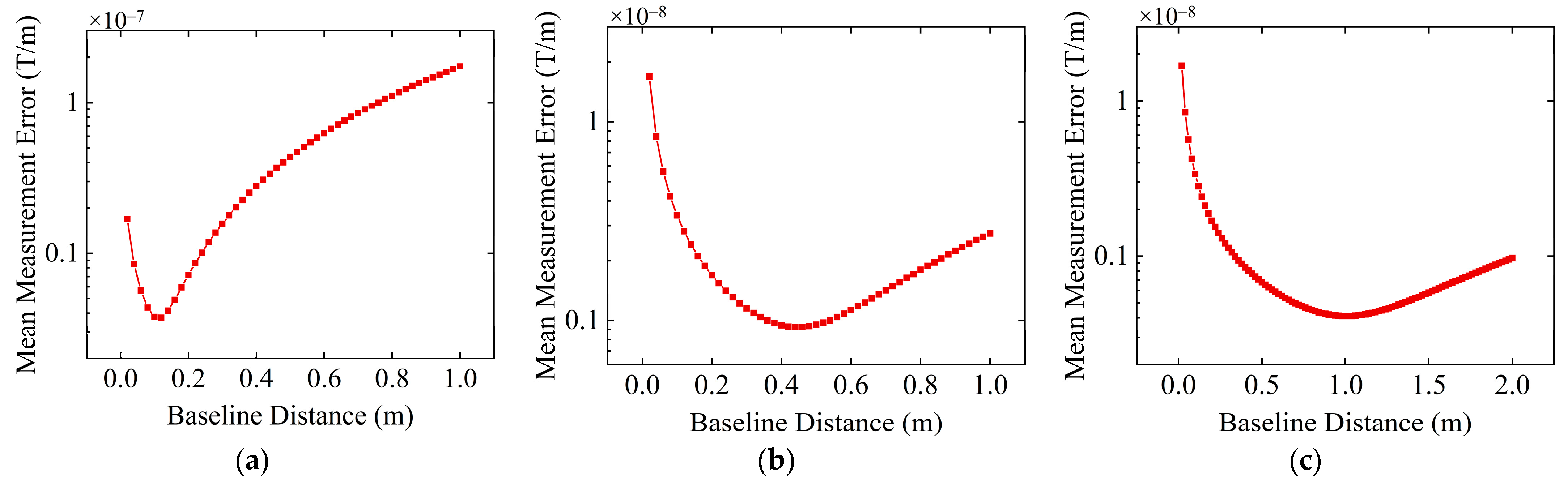
3.2. Selection of the Optimal Baseline Distance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ding, X.; Li, Y.; Luo, M.; Chen, J.; Li, Z.; Liu, H. Estimating Locations and Moments of Multiple Dipole-Like Magnetic Sources from Magnetic Gradient Tensor Data Using Differential Evolution. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5904913. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, Y.; Wang, C.; Li, Q.; Li, F.; Liu, W. A New Magnetic Target Localization Method Based on Two-Point Magnetic Gradient Tensor. Remote Sens. 2022, 14, 6088. [Google Scholar] [CrossRef]
- Zheng, X.; Tian, Y.; Wang, B. A Magnetic Gradient Tensor Based Method for UXO Detection on Movable Platform. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5905709. [Google Scholar] [CrossRef]
- Wang, X.; Liu, H.; Wang, H.; Ge, J.; Dong, H.; Liu, Z. Quantitative Analysis of the Measurable Areas of Differential Magnetic Gradient Tensor Systems for Unexploded Ordnance Detection. IEEE Sens. J. 2021, 21, 5952–5960. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, S.; Chen, S.; Luo, C. Underground Target Localization Based on Improved Magnetic Gradient Tensor With Towed Transient Electromagnetic Sensor Array. IEEE Access 2022, 10, 25025–25033. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, L.H.; Sun, F. Underwater Continuous Localization Based on Magnetic Dipole Target Using Magnetic Gradient Tensor and Draft Depth. IEEE Geosci. Remote Sens. Lett. 2014, 11, 178–180. [Google Scholar] [CrossRef]
- Hu, S.; Tang, J.; Ren, Z.; Chen, C.; Zhou, C.; Xiao, X.; Zhao, T. Multiple Underwater Objects Localization with Magnetic Gradiometry. IEEE Geosci. Remote Sens. Lett. 2019, 16, 296–300. [Google Scholar] [CrossRef]
- Schmidt, P.; Clark, D.; Leslie, K.; Bick, M.; Tilbrook, D.; Foley, C. GETMAG—A SQUID Magnetic Tensor Gradiometer for Mineral and Oil Exploration. Explor. Geophys. 2004, 35, 297–305. [Google Scholar] [CrossRef]
- Primin, M.A.; Nedayvoda, I.V. Non-Contact Analysis of Magnetic Fields of Biological Objects: Algorithms for Data Recording and Processing. Cybern. Syst. Anal. 2020, 56, 848–862. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, X.; Dong, H.; Liu, Z.; Hu, X. Theories, Applications, and Expectations for Magnetic Anomaly Detection Technology: A Review. IEEE Sens. J. 2023, 23, 17868–17882. [Google Scholar] [CrossRef]
- Lin, S.; Pan, D.; Wang, B.; Liu, Z.; Liu, G.; Wang, L.; Li, L. Improvement and omnidirectional analysis of magnetic gradient tensor invariants method. IEEE Trans. Ind. Electron. 2020, 68, 7603–7612. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, H.; Zhang, X.; Lyu, W.; Li, X.; Sang, S. A correction method of magnetic gradient tensor system to improve magnet localization accuracy. Sens. Actuators A Phys. 2024, 369, 115194. [Google Scholar] [CrossRef]
- Ge, L.; Han, Q.; Tong, X.; Wang, Y. Detection, Location, and Classification of Multiple Dipole-like Magnetic Sources Based on L2 Norm of the Vertical Magnetic Gradient Tensor Data. Sensors 2023, 23, 4440. [Google Scholar] [CrossRef]
- Li, Q.; Shi, Z.; Li, Z.; Fan, H.; Zhang, G.; Li, T. Magnetic Object Positioning Based on Second-Order Magnetic Gradient Tensor System. IEEE Sens. J. 2021, 21, 18237–18248. [Google Scholar] [CrossRef]
- Li, Q.; Shi, Z.; Li, Z.; Fan, H.; Zhang, G. Preferred Configuration and Detection Limits Estimation of Magnetic Gradient Tensor System. IEEE Trans. Instrum. Meas. 2021, 70, 1010214. [Google Scholar] [CrossRef]
- Wu, J.; Rong, L.; Jia, H.; Zhang, G.; Qiu, L.; Dong, H.; Pei, Y.; Zhang, S.; Yuan, X.; Li, B. Calibration method for planar SQUID gradiometers based on the magnetic gradient tensor components. Meas. Sci. Technol. 2023, 34, 105001. [Google Scholar] [CrossRef]
- Wei, S.; Liao, X.; Zhang, H.; Pang, J.; Zhou, Y. Recent Progress of Fluxgate Magnetic Sensors: Basic Research and Application. Sensors 2021, 21, 1500. [Google Scholar] [CrossRef]
- Xu, L.; Gu, H.; Chang, M.; Fang, L.; Lin, P.; Lin, C. Magnetic Target Linear Location Method Using Two-Point Gradient Full Tensor. IEEE Trans. Instrum. Meas. 2021, 70, 6007808. [Google Scholar] [CrossRef]
- Jin, H.; Guo, J.; Wang, H.; Zhuang, Z.; Qin, J.; Wang, T. Magnetic Anomaly Detection and Localization Using Orthogonal Basis of Magnetic Tensor Contraction. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5944–5954. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, N.; Fang, L.; Chen, H.; Lin, P.; Lin, C.; Wang, J. Simulation Analysis of Magnetic Gradient Full-Tensor Measurement System. Math. Probl. Eng. 2021, 2021, 6688364. [Google Scholar] [CrossRef]
- Bracken, R.E.; Grover, T.P.; Puniwai, G.S. Development and Testing of a Tensor Magnetic Gradiometer System with Trial Monitoring Near the Kilauea Volcano, Hawaii; 2331-1258; US Department of the Interior, U.S. Geological Survey: Reston, VA, USA, 1998.
- Bracken, R.E.; Smith, D.V.; Brown, P.J. Calibrating a Tensor Magnetic Gradiometer Using Spin Data; U.S. Geological Survey: Reston, VA, USA, 2005. Available online: https://pubs.usgs.gov/sir/2005/5045/ (accessed on 24 February 2005).
- Wiegert, R.F. Magnetic STAR technology for real-time localization and classification of unexploded ordnance and buried mines. In Proceedings of the Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XIV, Orlando, FL, USA, 13–17 April 2009; pp. 514–522. [Google Scholar] [CrossRef]
- Wiegert, R.; Lee, K.; Oeschger, J. Improved magnetic STAR methods for real-time, point-by-point localization of unexploded ordnance and buried mines. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Qu, X.; Pan, X.; Fang, G.; Chen, L. A Modified Magnetic Gradient Contraction Based Method for Ferromagnetic Target Localization. Sensors 2016, 16, 2168. [Google Scholar] [CrossRef]
- Koch, R.H.; Keefe, G.A.; Allen, G. Room temperature three sensor magnetic field gradiometer. Rev. Sci. Instrum. 1996, 67, 230–235. [Google Scholar] [CrossRef]
- Chen, W.; Li, X.; Zhang, H.; Li, C.; Zhang, X.; Sang, S. Magnetic target nonlinear positioning method based on planar regular octagon tensor system. Meas. Sci. Technol. 2024, 35, 055120. [Google Scholar] [CrossRef]
- Gang, Y.; Zhang, Y.; Fan, H.; Zhang, G.; Ren, G. Linear calibration method of magnetic gradient tensor system. Measurement 2014, 56, 8–18. [Google Scholar] [CrossRef]
- Qin, Y.; Li, K.; Yao, C.; Wang, X.; Ouyang, J.; Yang, X. Magnetic Anomaly Detection Using Full Magnetic Gradient Orthonormal Basis Function. IEEE Sens. J. 2020, 20, 12928–12940. [Google Scholar] [CrossRef]
- Yin, G.; Zhang, Y.; Fan, H.; Li, Z. Magnetic dipole localization based on magnetic gradient tensor data at a single point. J. Appl. Remote Sens. 2014, 8, 083596. [Google Scholar] [CrossRef]
- Deng, X.L.; Shen, W.B.; Yang, M.; Kuhn, M.; Ran, J. First-Order Derivatives of Principal and Main Invariants of Magnetic Gradient Tensor of a Uniformly Magnetized Tesseroid and Spherical Shell. Surv. Geophys. 2022, 43, 1233–1262. [Google Scholar] [CrossRef]
- Du, G.; Wang, Y.; Wang, G.; Chen, Q. A Robust Calibration and Adaptive Multipair of Magnetic Gradient Tensors Localization Method for Magnetic Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5902614. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, N.; Fang, L.; Lin, P.; Chen, H.; Chang, M. Error analysis of cross-shaped magnetic gradient full tensor measurement system. AIP Adv. 2020, 10, 125201. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Zhang, Y.; Liu, W. Structural Design and Parameter Optimization of Magnetic Gradient Tensor Measurement System. Sensors 2024, 24, 4083. https://doi.org/10.3390/s24134083
Liu G, Zhang Y, Liu W. Structural Design and Parameter Optimization of Magnetic Gradient Tensor Measurement System. Sensors. 2024; 24(13):4083. https://doi.org/10.3390/s24134083
Chicago/Turabian StyleLiu, Gaigai, Yingzi Zhang, and Wenyi Liu. 2024. "Structural Design and Parameter Optimization of Magnetic Gradient Tensor Measurement System" Sensors 24, no. 13: 4083. https://doi.org/10.3390/s24134083
APA StyleLiu, G., Zhang, Y., & Liu, W. (2024). Structural Design and Parameter Optimization of Magnetic Gradient Tensor Measurement System. Sensors, 24(13), 4083. https://doi.org/10.3390/s24134083