Research on Division of Labor Decision and System Stability of Swarm Robots Based on Mutual Information

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A mutual information model is built to measure the disparity of information interaction within swarm robot systems. The exponential function is leveraged to convert the mutual information value into a probability. Leveraging this probability value, the assessment of information interaction among diverse robots is conducted to unveil the strategic choices made by individual robots across the disparity of mutual information.
- The division of labor decision-making behavior of swarm robots under different mutual information levels is modeled as a game-theoretic model, exploring the complex dynamical behaviors exhibited by robots during the game process. Based on this, the stability and bifurcation characteristics of the established dynamic game model are analyzed. The impact of system parameter on the dynamic behavior of the model is investigated, leading to the determination of equilibrium stability conditions and complex features.
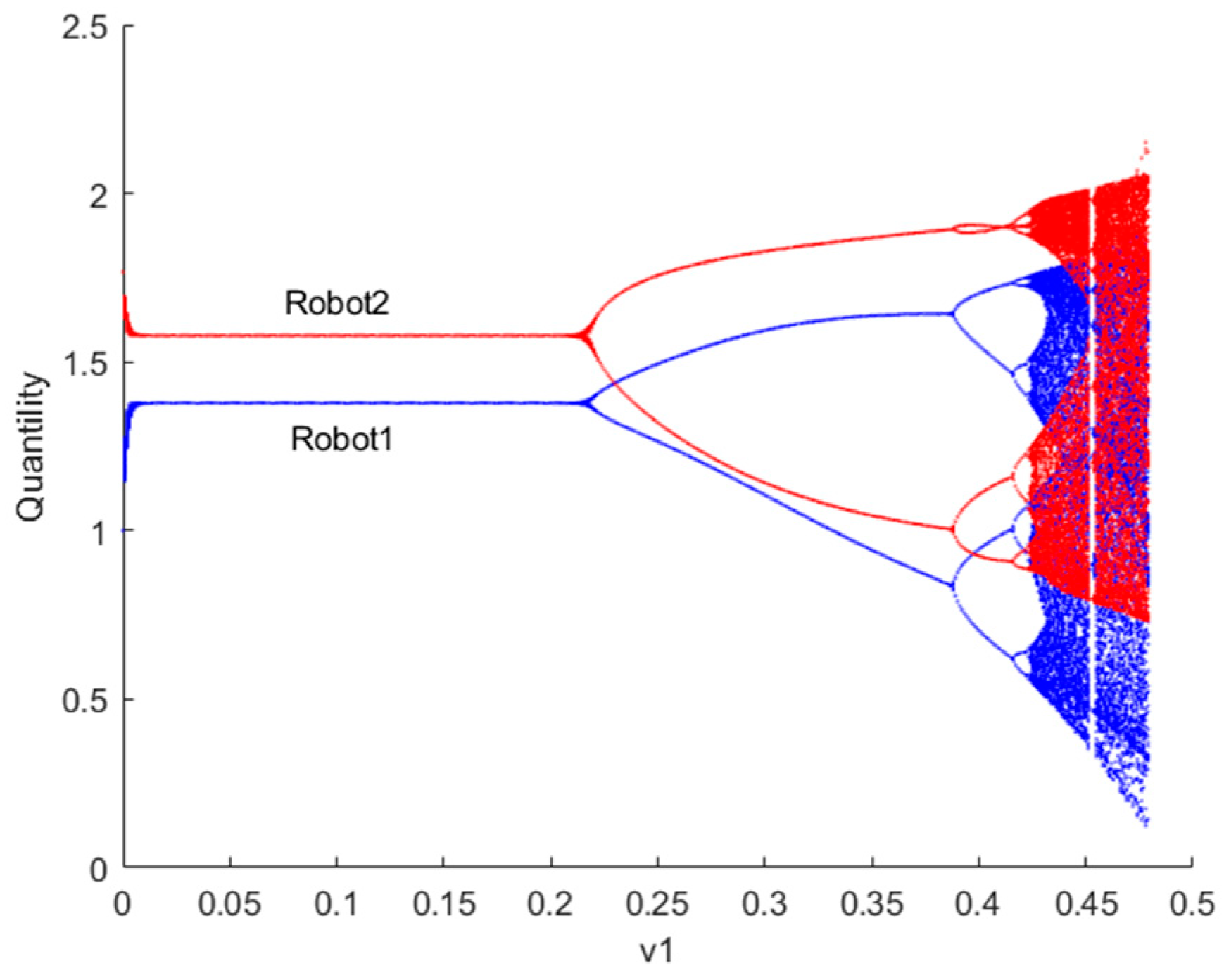
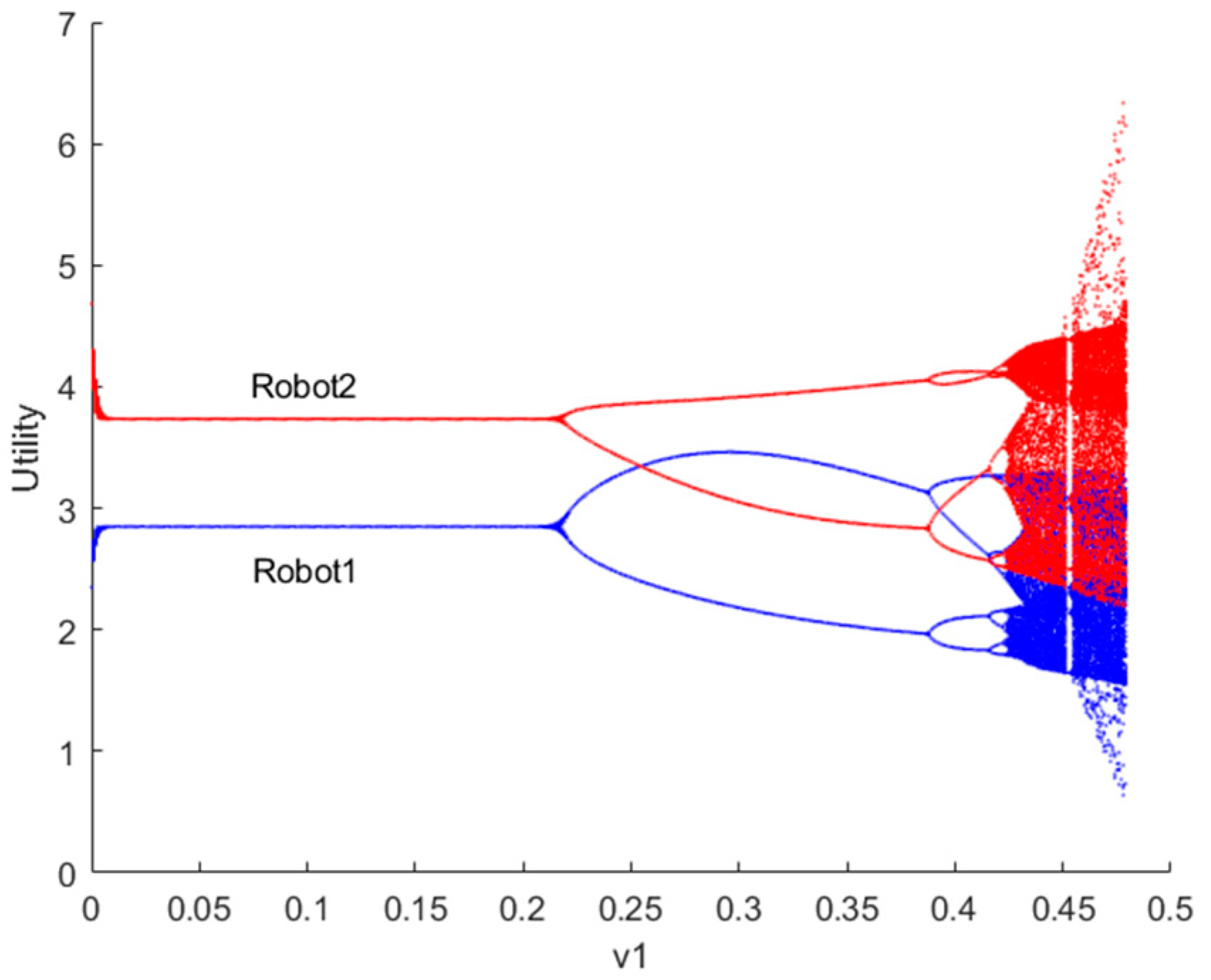
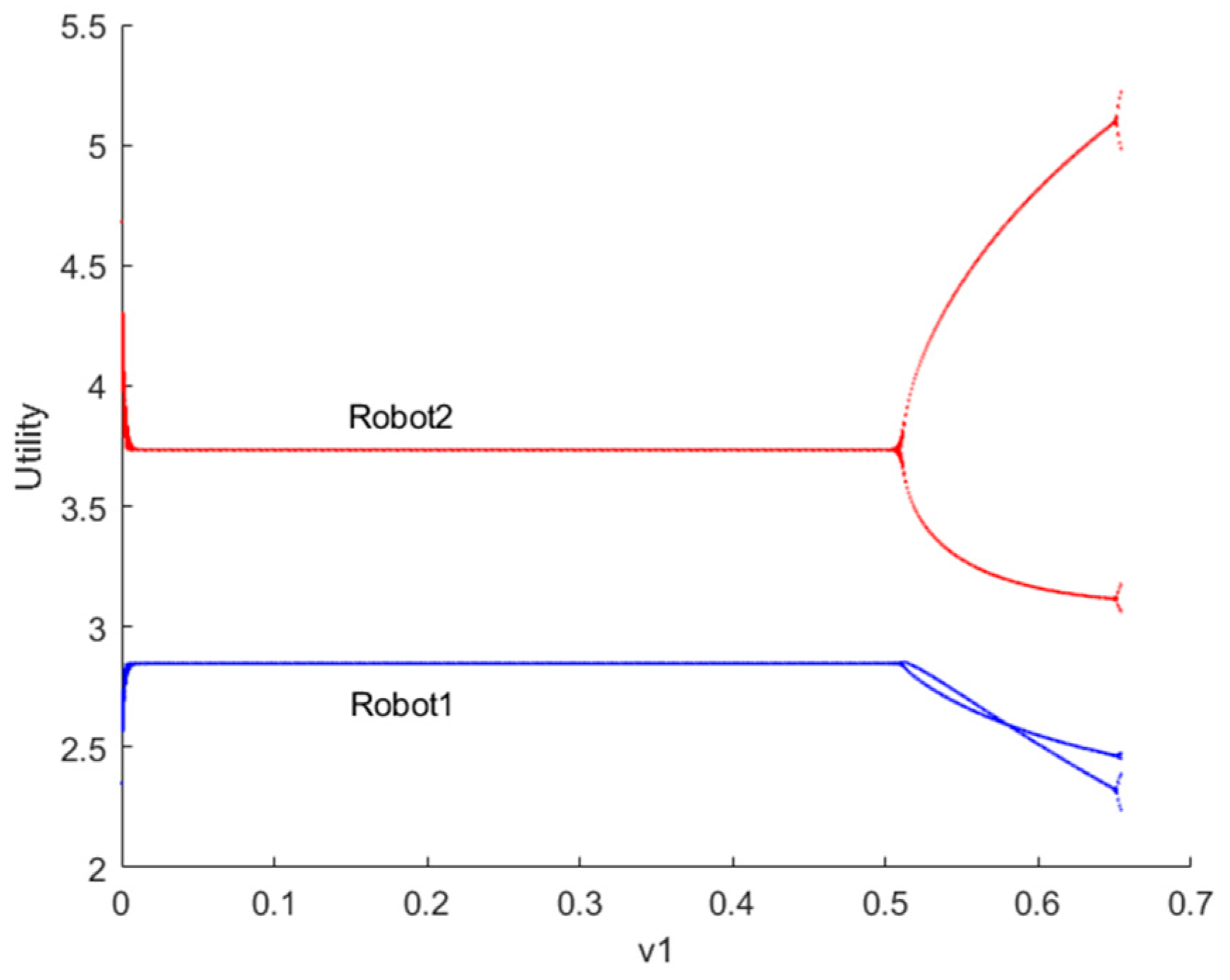
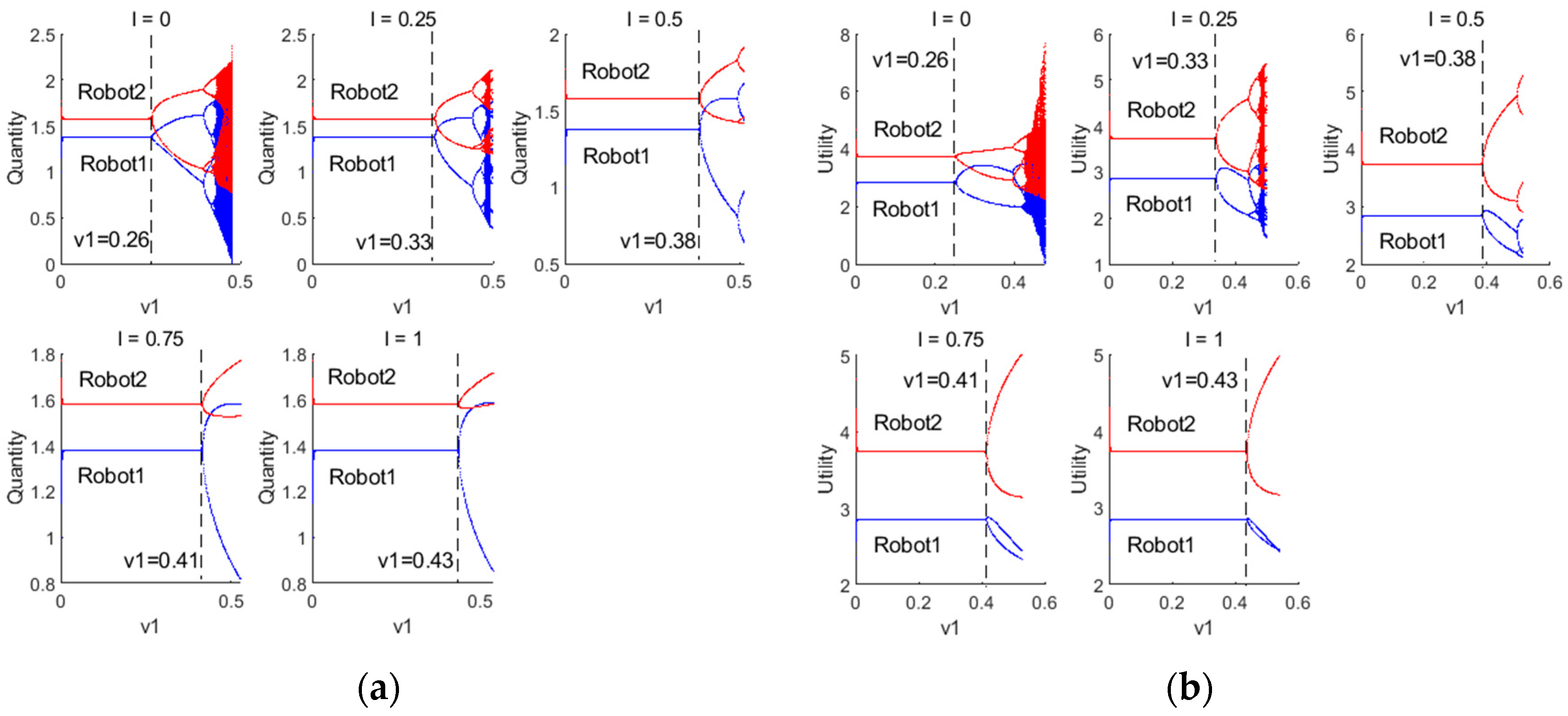
- The conclusions derived and simulated are as follows: ① When the decision parameter of the game model varies within a certain range, the Nash equilibrium point loses stability and enters a chaotic state. ② As the level of information exchange between robots increases (i.e., increases), the decision-making pattern of robots transitions gradually from the Cournot game to the Stackelberg game. Concurrently, the sensitivity of swarm robotics systems to changes in decision parameter decreases, reducing the likelihood of the system entering a chaotic state.
2. Related Work
2.1. Research Related to Division of Labor and Decision-Making in Swarm Robotic Systems
2.2. Research Related to the Stability of Swarm Robotic Systems
3. Model
- “ (State)” signifies information pertaining to the current condition of the robot, encompassing aspects such as strategy, position, etc.
- “ (Behavior)” embodies the robot’s behavior or decision-making, governing its adaptations and adjustments.
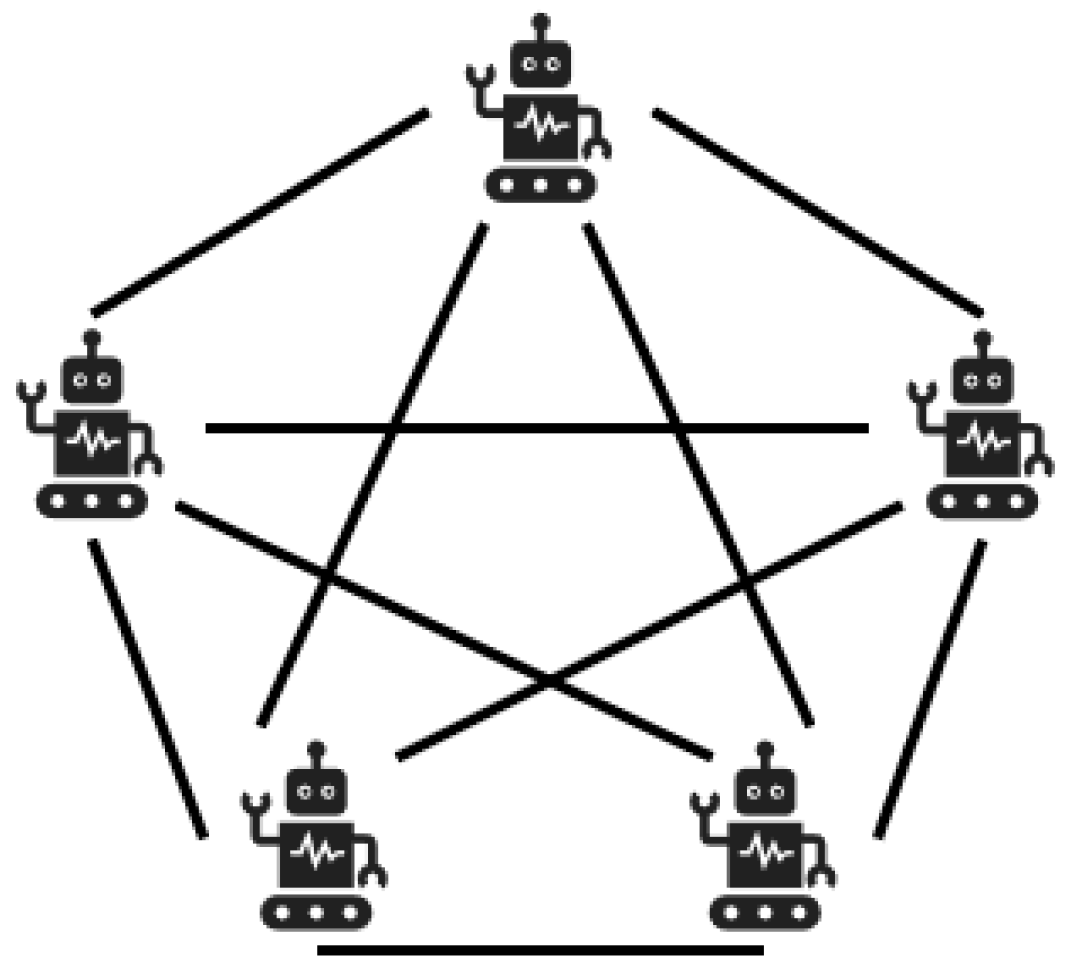
- “ (Network)” is defined as a complete graph that delineates the information links existing between a robot and its neighboring counterparts.
- “ (Utility)” describes the utility of the robot, and each individual robot adapts its strategies aiming to maximize utility.
- “ (Information)” represents the mutual information among robots, reflecting the disparity of information interaction and sharing among them.
3.1. Network Topology
3.2. Mutual Information Model
3.3. Game Model
4. Model Analysis
4.1. Stability Analysis of the System When
4.2. Stability Analysis of the System When
4.3. Stability Analysis of the System When
5. Simulation Analysis
5.1. Parameter Settings
5.2. Simulation
5.2.1. Simulation Analysis When
5.2.2. Simulation Analysis When
5.2.3. Simulation Analysis When
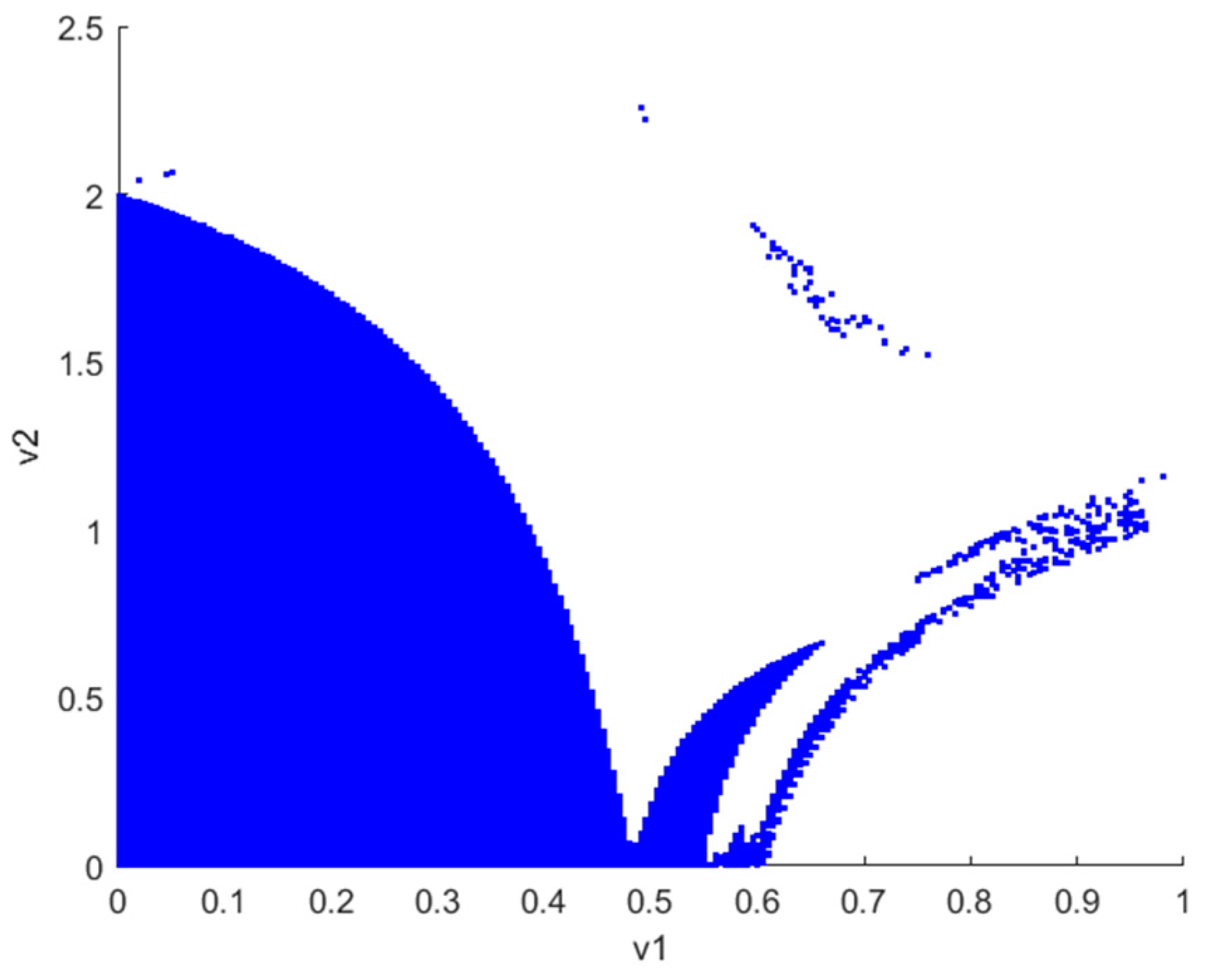
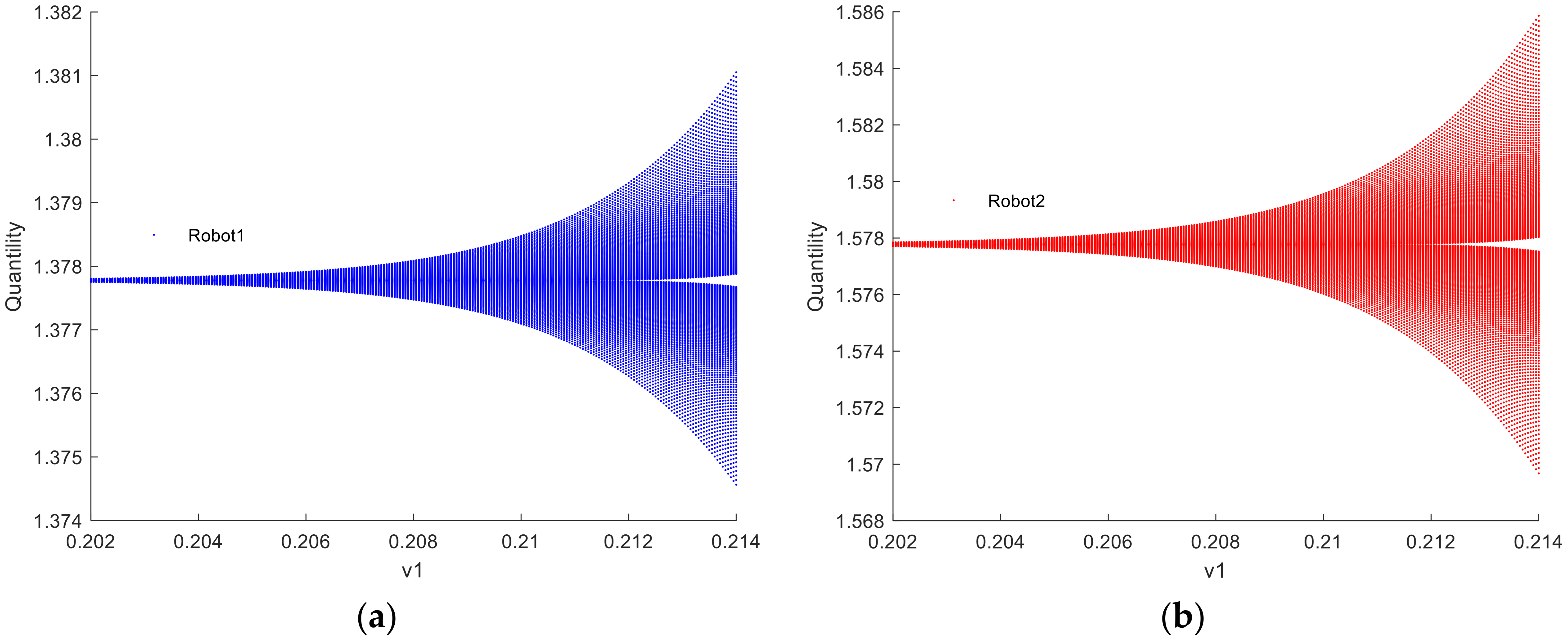
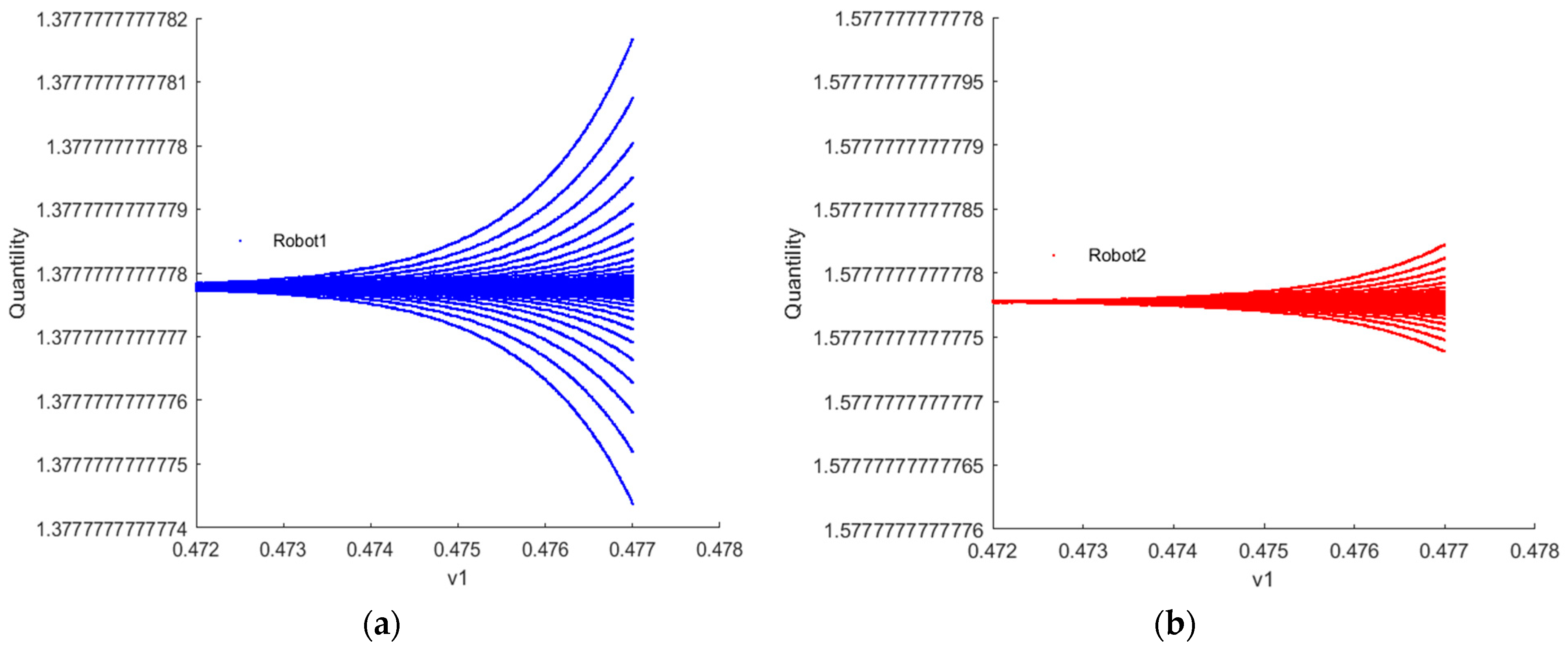
5.2.4. Fractal Phenomenon Simulation Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chinglemba, T.; Biswas, S.; Malakar, D.; Meena, V.; Sarkar, D.; Biswas, A. Introductory Review of Swarm Intelligence Techniques. In Advances in Swarm Intelligence: Variations and Adaptations for Optimization Problems; Springer: Berlin, Germany, 2022; pp. 15–35. [Google Scholar]
- Duéñez-Guzmán, E.A.; Sadedin, S.; Wang, J.X.; McKee, K.R.; Leibo, J.Z. A social path to human-like artificial intelligence. Nat. Mach. Intell. 2023, 5, 1181–1188. [Google Scholar] [CrossRef]
- Tang, J.; Duan, H.; Lao, S. Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: A comprehensive review. Artif. Intell. Rev. 2023, 56, 4295–4327. [Google Scholar] [CrossRef]
- Farine, D.R. Collective action in birds. Curr. Biol. 2022, 32, R1140–R1144. [Google Scholar] [CrossRef] [PubMed]
- Okada, R.; Ikeno, H.; Aonuma, H.; Sakura, M.; Ito, E. Honey Bee Waggle Dance as a Model of Swarm Intelligence. J. Robot. Mechatron. 2023, 35, 901–910. [Google Scholar] [CrossRef]
- Cheraghi, A.R.; Shahzad, S.; Graffi, K. Past, present, and future of swarm robotics. In Intelligent Systems and Applications: Proceedings of the 2021 Intelligent Systems Conference (IntelliSys); Springer International Publishing: Berlin, Germany, 2022; Volume 3, pp. 190–233. [Google Scholar]
- Duan, H.; Huo, M.; Fan, Y. From animal collective behaviors to swarm robotic cooperation. Natl. Sci. Rev. 2023, 10, nwad040. [Google Scholar] [CrossRef] [PubMed]
- Bredeche, N.; Fontbonne, N. Social learning in swarm robotics. Philos. Trans. R. Soc. B 2022, 377, 20200309. [Google Scholar] [CrossRef]
- Zhao, H.; Pacheco, A.; Strobel, V.; Reina, A.; Liu, X.; Dudek, G.; Dorigo, M. A Generic Framework for Byzantine-tolerant Consensus Achievement in Robot Swarms. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Ann Arbor, MI, USA; pp. 8839–8846. [Google Scholar]
- Ryabtsev, S.; Sakolchik, A.; Antonov, V.; Petrenko, V.; Tebueva, F.; Makarenko, S. Iterative method of labor division for multi-robotic systems. In Proceedings of the International Conference on Artificial Life and Robotics, Online, 20–23 January 2022; pp. 699–702. [Google Scholar]
- Chen, S.; Yin, D.; Niu, Y. A survey of robot swarms’ relative localization method. Sensors 2022, 22, 4424. [Google Scholar] [CrossRef] [PubMed]
- Zou, Q.; Du, X.; Liu, Y.; Chen, H.; Wang, Y.; Yu, J. Dynamic path planning and motion control of microrobotic swarms for mobile target tracking. IEEE Trans. Autom. Sci. Eng. 2022, 20, 2454–2468. [Google Scholar] [CrossRef]
- Yamagishi, K.; Suzuki, T. Cooperative Passing Based on Chaos Theory for Multiple Robot Swarms. J. Robot. Mechatron. 2023, 35, 969–976. [Google Scholar] [CrossRef]
- Zakir, R.; Dorigo, M.; Reina, A. Robot swarms break decision deadlocks in collective perception through cross-inhibition. In International Conference on Swarm Intelligence; Springer International Publishing: Berlin, Germany, 2022; pp. 209–221. [Google Scholar]
- Mahmoudi, A.; Jemielniak, D. Proof of biased behavior of Normalized Mutual Information. Sci. Rep. 2024, 14, 9021. [Google Scholar] [CrossRef]
- Xu, Y.; Zheng, R.; Zhang, S.; Liu, M.; Huang, S. CARE: Confidence-Rich Autonomous Robot Exploration using Bayesian Kernel Inference and Optimization. IEEE Robot. Autom. Lett. 2023, 8, 6755–6762. [Google Scholar] [CrossRef]
- Kailas, S.; Luo, W.; Sycara, K. Multi-Robot Adaptive Sampling for Supervised Spatiotemporal Forecasting. In Progress in Artificial Intelligence: EPIA Conference on Artificial Intelligence; Springer Nature: Cham, Switzerland; Berlin, Germany, 2023; pp. 349–361. [Google Scholar]
- Parunak, H.V.D.; Brueckner, S.; Fleischer, M.; Odell, J. Co-X: Defining what agents do together. In Proceedings of the AAMAS’02, Workshop on Teamwork and Coalition Formation, Bologna, Italy, 2 July 2002; pp. 62–69. [Google Scholar]
- Jun, M.A. Chaos theory and applications: The physical evidence, mechanism are important in chaotic systems. Chaos Theory Appl. 2022, 4, 1–3. [Google Scholar]
- Shen, B.W. Attractor Coexistence, Butterfly Effects, and Chaos Theory (ABC): A Review of Lorenz Models and a Generalized Lorenz Model. In Proceedings of the 16th Chaos International Conference CHAOS, Heraklion, Crete, Greece, 13–16 June 2023. [Google Scholar]
- Ismailov, B. Application of Chaos Theory, Thermodynamics and AI in the Analysis of the Behavior of Complex Systems. New Front. Phys. Sci. Res. 2022, 3, 81–102. [Google Scholar] [CrossRef]
- Du, H.; Zhang, C.; Bai, G.; Chen, L. Mission reliability modeling of UAV swarm and its structure optimization based on importance measure. Reliab. Eng. Syst. Saf. 2021, 215, 107879. [Google Scholar] [CrossRef]
- Han, S.; Fan, C.; Li, X.; Luo, X.; Liu, Z. A modified genetic algorithm for task assignment of heterogeneous unmanned aerial vehicle system. Meas. Control 2021, 54, 994–1014. [Google Scholar] [CrossRef]
- He, Z.; Sun, Y.; Feng, Z. Research on resource allocation of autonomous swarm robots based on game theory. Electronics 2023, 12, 4370. [Google Scholar] [CrossRef]
- Yamamoto, S.; Woo, J.; Chin, W.H.; Matsumura, K.; Kubota, N. Interactive information support by robot partners based on informationally structured space. J. Robot. Mechatron. 2020, 32, 236–243. [Google Scholar] [CrossRef]
- Hu, F. Mutual information-enhanced digital twin promotes vision-guided robotic grasping. Adv. Eng. Inform. 2022, 52, 101562. [Google Scholar] [CrossRef]
- Bonnet, F.; Mills, R.; Szopek, M.; Schönwetter-Fuchs, S.; Halloy, J.; Bogdan, S.; Correia, L.; Mondada, F.; Schmickl, T. Robots mediating interactions between animals for interspecies collective behaviors. Sci. Robot. 2019, 4, eaau7897. [Google Scholar] [CrossRef]
- Tomaselli, C.; Guastella, D.C.; Muscato, G.; Minati, L.; Frasca, M.; Gambuzza, L.V. Synchronization of moving chaotic robots. IEEE Robot. Autom. Lett. 2024, 9, 6496–6503. [Google Scholar] [CrossRef]
- Balootaki, M.A.; Rahmani, H.; Moeinkhah, H.; Mohammadzadeh, A. A new predictive intelligent controller and path planning for mobile robots. J. Vib. Control 2024. [Google Scholar] [CrossRef]
- Li, R.; Li, X.; Gan, Q.; Wu, H.; Cao, J. Finite time event-triggered consensus of variable-order fractional multi-agent systems. Chaos Solitons Fractals 2023, 174, 113777. [Google Scholar] [CrossRef]
- Hussain, A.; Belardinelli, F. Stability of multi-agent learning in competitive networks: Delaying the onset of chaos. Proc. AAAI Conf. Artif. Intell. 2024, 38, 17435–17443. [Google Scholar] [CrossRef]
- Wang, Z. Consensus control for linear multiagent systems under delayed transmitted information. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 5670–5678. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Chen, Y.; Qi, Y.; Jin, L. A distributed competitive and collaborative coordination for multirobot systems. IEEE Trans. Mob. Comput. 2024, 1–13. [Google Scholar] [CrossRef]
- von Neumann, J.; Morgenstern, O. Theory of Games and Economic Behavior; Princeton University Press: Princeton, NJ, USA, 1944. [Google Scholar]
- Kahneman, D.; Tversky, A. Prospect Theory: An Analysis of Decision under Risk. Econometrica 1979, 47, 263–292. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Z.; Sun, Y. Research on Division of Labor Decision and System Stability of Swarm Robots Based on Mutual Information. Sensors 2024, 24, 5029. https://doi.org/10.3390/s24155029
Feng Z, Sun Y. Research on Division of Labor Decision and System Stability of Swarm Robots Based on Mutual Information. Sensors. 2024; 24(15):5029. https://doi.org/10.3390/s24155029
Chicago/Turabian StyleFeng, Zhongyuan, and Yi Sun. 2024. "Research on Division of Labor Decision and System Stability of Swarm Robots Based on Mutual Information" Sensors 24, no. 15: 5029. https://doi.org/10.3390/s24155029