
Ergodic Rate Analysis of Simultaneous Transmitting and Reflecting Reconfigurable Intelligent Surface-Assisted Rate-Splitting Multiple Access Systems Based on Discrete Phase Shifts

Abstract
1. Introduction
- (1)
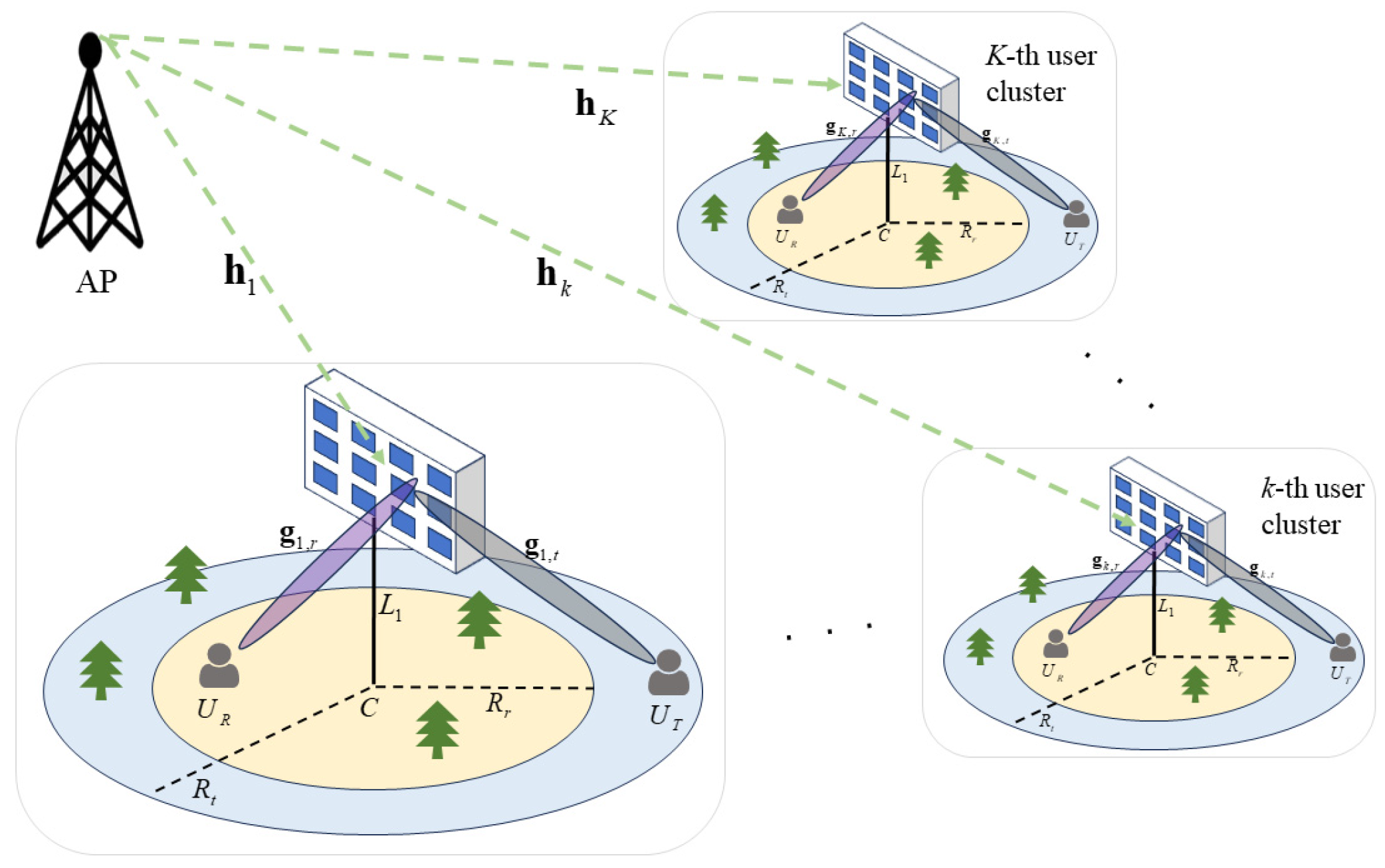
- We primarily consider a multi-user downlink RSMA communication system assisted by STAR-RIS. Firstly, we cluster the multiple users and ignore the interference between different user clusters. Secondly, considering that users are uniformly distributed within the range centered on the STAR-RIS, we quantify the phase shifts of the STAR-RIS. With this result, we further derive the theoretical values of the system ergodic rate under both the discrete and continuous phase shifts of the STAR-RIS for the performance evaluation.
- (2)
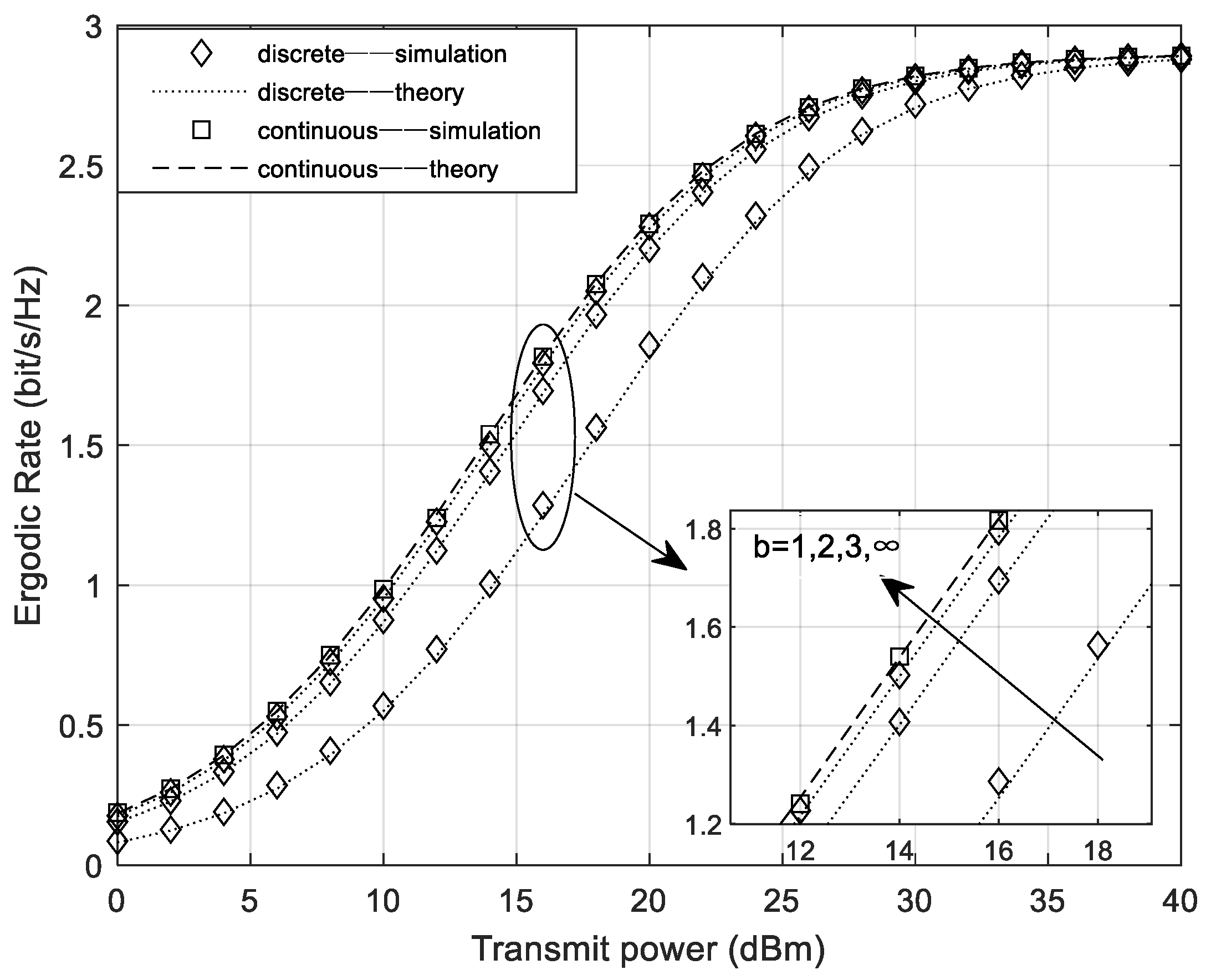
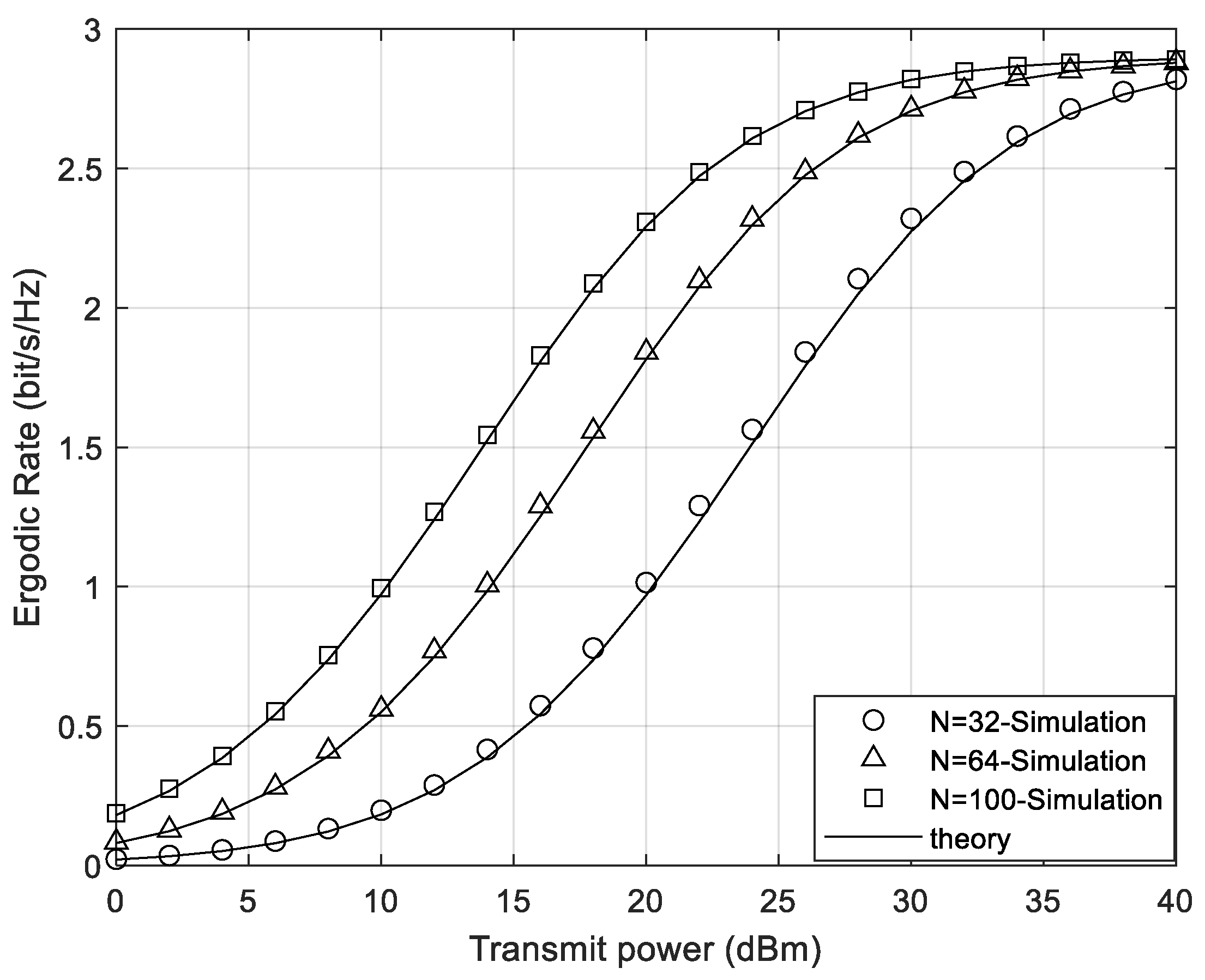
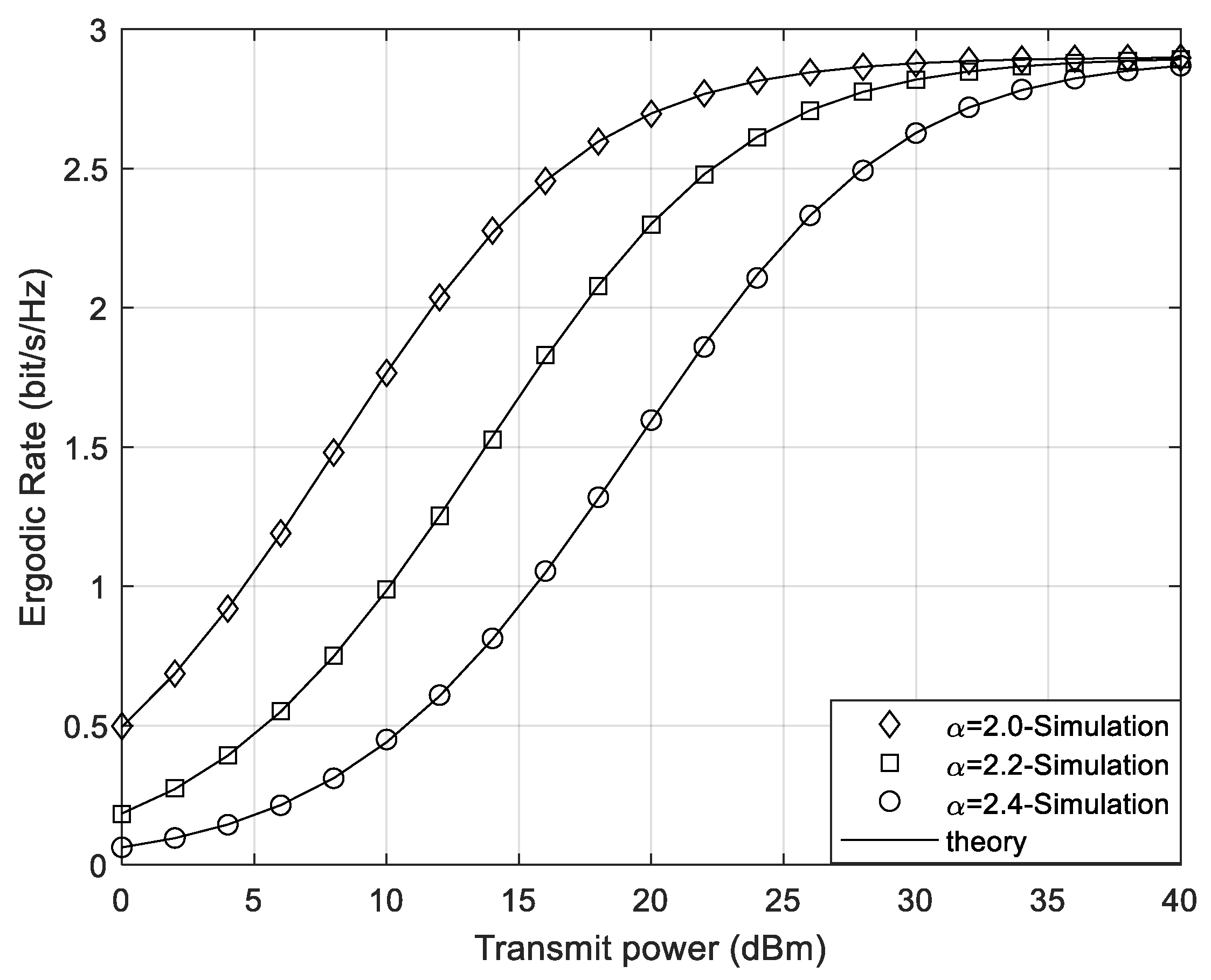
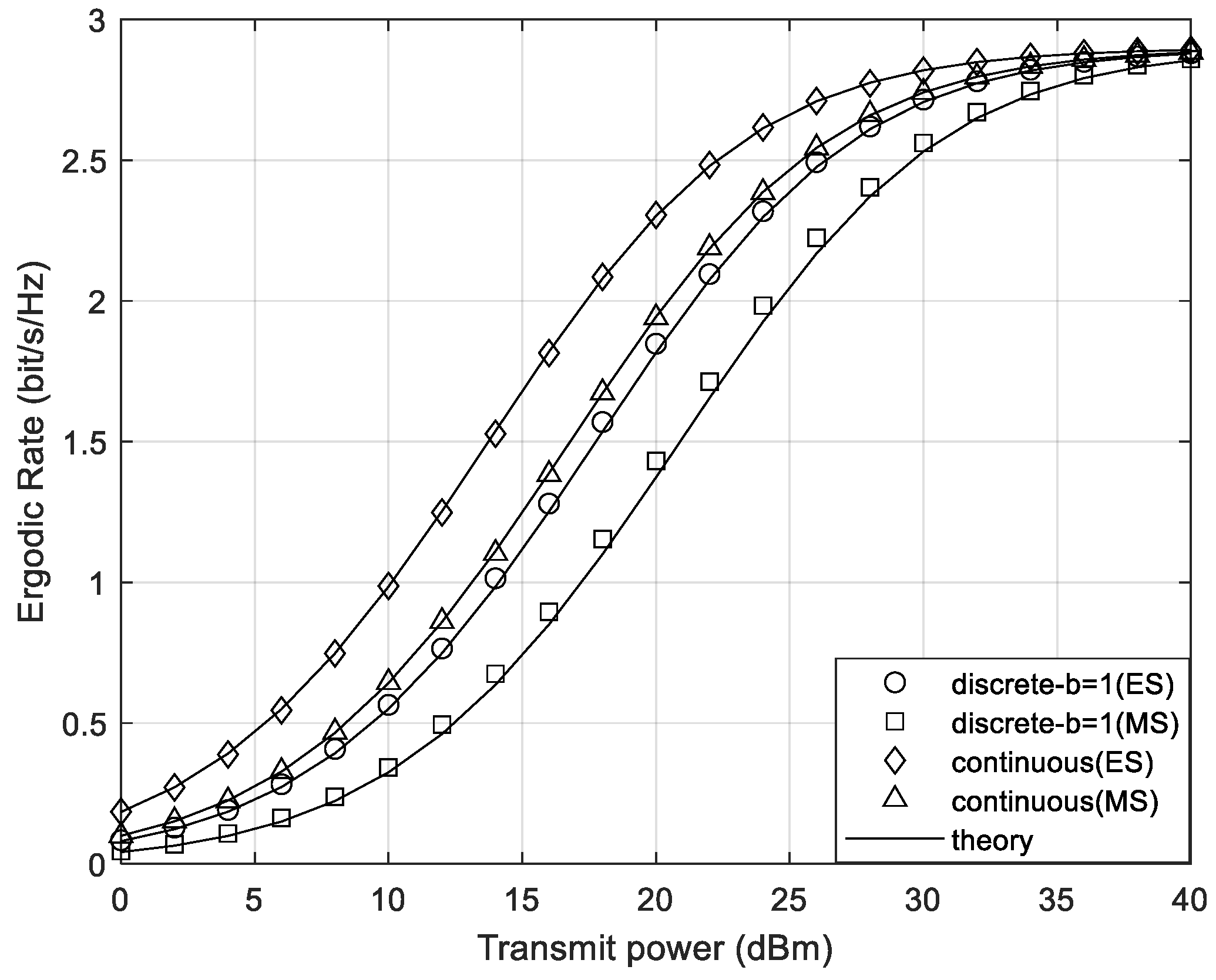
- Through Monte Carlo simulations, we verify the correctness of the theoretical derivations and demonstrate that the system’s ergodic rate with the discrete phase shifts of the STAR-RIS is inferior to that with the continuous phase shifts. However, increasing the number of quantization bits can make the performance of the discrete phase shifts approach that of the continuous phase shifts. Additionally, we show the impact of the number of STAR-RIS elements, the path loss exponent, and the different modes of STAR-RIS on the system performance.
2. System Model
2.1. Channel Model
2.2. STAR-RIS-Assisted RSMA Downlink Communication Model
3. Ergodic Rate Analysis
3.1. Ergodic Rate under Discrete Phase Shifts
3.2. Ergodic Rate under Continuous Phase Shifts
4. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Parameters | Explanations |
| complex Gaussian distribution with mean a and variance b | |
| absolute value or modulus of a complex number or number of elements of a set | |
| diagonal matrix with diagonal elements as vectors | |
| average value of a variable | |
| sampling function | |
| lower incomplete gamma function | |
| gamma function | |
| Markum Q Function | |
| error complementarity function |
References
- Gunasinghe, D.; Amarasuriya, G. Performance analysis of STAR-RIS for wireless communication. In Proceedings of the ICC 2022-IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 3275–3280. [Google Scholar]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS-aided hybrid satellite-terrestrial relay networks: Joint beamforming design and optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent Reflecting Surface-Aided Wireless Communications: A Tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Bjornson, E.; Ozdogan, O.; Larsson, E.G. Intelligent Reflecting Surface Versus Decode-and-Forward: How Large Surfaces are Needed to Beat Relaying? IEEE Wirel. Commun. Lett. 2019, 9, 244–248. [Google Scholar] [CrossRef]
- Tang, W.; Chen, M.Z.; Chen, X.; Dai, J.Y.; Han, Y.; Di Renzo, M.; Zeng, Y.; Jin, S.; Cheng, Q.; Cui, T.J. Wireless Communications With Reconfigurable Intelligent Surface: Path Loss Modeling and Experimental Measurement. IEEE Trans. Wirel. Commun. 2020, 20, 421–439. [Google Scholar] [CrossRef]
- Xu, J.; Liu, Y.; Mu, X.; Dobre, O.A. STAR-RISs: Simultaneous transmitting and reflecting reconfigurable intelligent surfaces. IEEE Commun. Lett. 2021, 25, 3134–3138. [Google Scholar] [CrossRef]
- Xiang, Z.; Tong, X.; Cai, Y. Secure transmission for NOMA systems with imperfect SIC. China Commun. 2020, 17, 67–78. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Wang, J.B.; Cola, T.d.; Wang, J. Joint beamforming and power allocation for satellite-terrestrial integrated networks with non-orthogonal multiple access. IEEE J. Sel. Top. Signal Process. 2019, 13, 657–670. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Cola, T.d.; Wang, J.B.; Zhu, W.P.; Cheng, J. Supporting iot with rate-splitting multiple access in satellite and aerial-integrated networks. IEEE Internet Things J. 2021, 8, 11123–11134. [Google Scholar] [CrossRef]
- Mao, Y.; Dizdar, O.; Clerckx, B.; Schober, R.; Popovski, P.; Poor, H.V. Rate-splitting multiple access: Fundamentals, survey, and future research trends. IEEE Commun. Surv. Tutor. 2022, 24, 2073–2126. [Google Scholar]
- Mao, Y.; Clerckx, B.; Li, V.O. Rate-splitting multiple access for downlink communication systems: Bridging, generalizing, and outperforming SDMA and NOMA. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 133. [Google Scholar] [CrossRef] [PubMed]
- Ho, C.M.; Nguyen, T.V.; Lee, C.; Nguyen, T.M.T.; Cho, S. Cooperative user relaying with rsma for 6g networks: Overview, research challenges and future trends. In Proceedings of the 2023 International Conference on Information Networking (ICOIN), Bangkok, Thailand, 11–14 January 2023; pp. 584–587. [Google Scholar]
- Rivera, M.; Jaafar, W.; Yanikomeroglu, H. Optimization of RIS-assisted RSMA-enabled tethered-UAV communications. In Proceedings of the 2023 IEEE Globecom Workshops (GC Wkshps), Kuala Lumpur, Malaysia, 4–8 December 2023; pp. 227–232. [Google Scholar]
- Narottama, B.; Aïssa, S. Quantum machine learning for performance optimization of RIS-assisted communications: Framework design and application to energy efficiency maximization of systems with RSMA. IEEE Trans. Wirel. Commun. 2024. early acces. [Google Scholar] [CrossRef]
- Singh, S.K.; Agrawal, K.; Singh, K.; Clerckx, B.; Li, C.-P. RSMA enhanced RIS-FD-UAV-aided short packet communications under imperfect SIC. In Proceedings of the 2022 IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 4–8 December 2022; pp. 1549–1554. [Google Scholar]
- Jolly, A.; Singh, K.; Biswas, S. RSMA for IRS aided 6G communication systems: Joint active and passive beamforming design. In Proceedings of the 2021 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Hyderabad, India, 13–16 December 2021; pp. 7–12. [Google Scholar]
- Karim, F.; Singh, S.K.; Singh, K.; Prakriya, S.; Li, C.-P. Performance analysis for RSMA-empowered STAR-RIS-aided downlink communications. In Proceedings of the 2023 IEEE 34th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Toronto, ON, Canada, 5–8 September 2023; pp. 1–6. [Google Scholar]
- Dhok, S.; Sharma, P.K. Rate-splitting multiple access with STAR RIS over spatially-correlated channels. IEEE Trans. Commun. 2022, 70, 6410–6424. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, L.; Li, X.; Guo, K.; Liu, H. Covert communications for star-ris-assisted industrial networks with a full duplex receiver and RSMA. IEEE Internet Things J. 2024, 11, 22483–22493. [Google Scholar] [CrossRef]
- Mohamed, Z.; Albaden, K.; Aïssa, S. Simultaneously transmitting and reflecting reconfigurable intelligent surface aided RSMA communications: Outage probability analysis. In Proceedings of the 2023 IEEE 34th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Toronto, ON, Canada, 5–8 September 2023; pp. 1–6. [Google Scholar]
- Wu, C.; Liu, Y.; Mu, X.; Gu, X.; Dobre, O.A. Coverage characterization of STAR-RIS networks: NOMA and OMA. IEEE Commun. Lett. 2021, 25, 3036–3040. [Google Scholar] [CrossRef]
- Wu, C.; You, C.; Liu, Y.; Gu, X.; Cai, Y. Channel estimation for STAR-RIS-aided wireless communication. IEEE Commun. Lett. 2021, 26, 652–656. [Google Scholar] [CrossRef]
- Sobhi-Givi, S.; Shayesteh, M.G.; Kalbkhani, H. Energy-efficient power allocation and user selection for mmWave-NOMA transmission in M2M communications underlaying cellular heterogeneous networks. IEEE Trans. Veh. Technol. 2020, 69, 9866–9881. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, J.; Xia, W.; Ren, Y.; Yin, H.; Zhu, H. On the discrete phase shifts design for distributed RIS-aided downlink MIMO-NOMA systems. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 363–368. [Google Scholar]
- Badiu, M.-A.; Coon, J.P. Communication through a large reflecting surface with phase errors. IEEE Wirel. Commun. Lett. 2019, 9, 184–188. [Google Scholar] [CrossRef]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Anjana, B.; Jadhav, H.; Kumaravelu, V.B.; Soria, F.R.C.; Sayeed, M.S.; Murugadass, A. Smart reconfigurable intelligent surface with discrete phase shifter for next generation networks. In Proceedings of the 2022 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 24–26 March 2022; pp. 178–182. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Default Value | Parameters | Default Value |
|---|---|---|---|
| number of STAR-RIS elements | noise power | dBm | |
| path loss exponent | path loss at a reference unit distance | dB | |
| number of quantization bits | amplitude coefficient of STAR-RIS |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Zhou, Y. Ergodic Rate Analysis of Simultaneous Transmitting and Reflecting Reconfigurable Intelligent Surface-Assisted Rate-Splitting Multiple Access Systems Based on Discrete Phase Shifts. Sensors 2024, 24, 5480. https://doi.org/10.3390/s24175480
Liu T, Zhou Y. Ergodic Rate Analysis of Simultaneous Transmitting and Reflecting Reconfigurable Intelligent Surface-Assisted Rate-Splitting Multiple Access Systems Based on Discrete Phase Shifts. Sensors. 2024; 24(17):5480. https://doi.org/10.3390/s24175480
Chicago/Turabian StyleLiu, Tao, and Yue Zhou. 2024. "Ergodic Rate Analysis of Simultaneous Transmitting and Reflecting Reconfigurable Intelligent Surface-Assisted Rate-Splitting Multiple Access Systems Based on Discrete Phase Shifts" Sensors 24, no. 17: 5480. https://doi.org/10.3390/s24175480
APA StyleLiu, T., & Zhou, Y. (2024). Ergodic Rate Analysis of Simultaneous Transmitting and Reflecting Reconfigurable Intelligent Surface-Assisted Rate-Splitting Multiple Access Systems Based on Discrete Phase Shifts. Sensors, 24(17), 5480. https://doi.org/10.3390/s24175480