
Study on the Equivalence Transformation between Blasting Vibration Velocity and Acceleration
Abstract
:1. Introduction
2. Field Blasting Tests
2.1. Descriptions of the Blast Tests
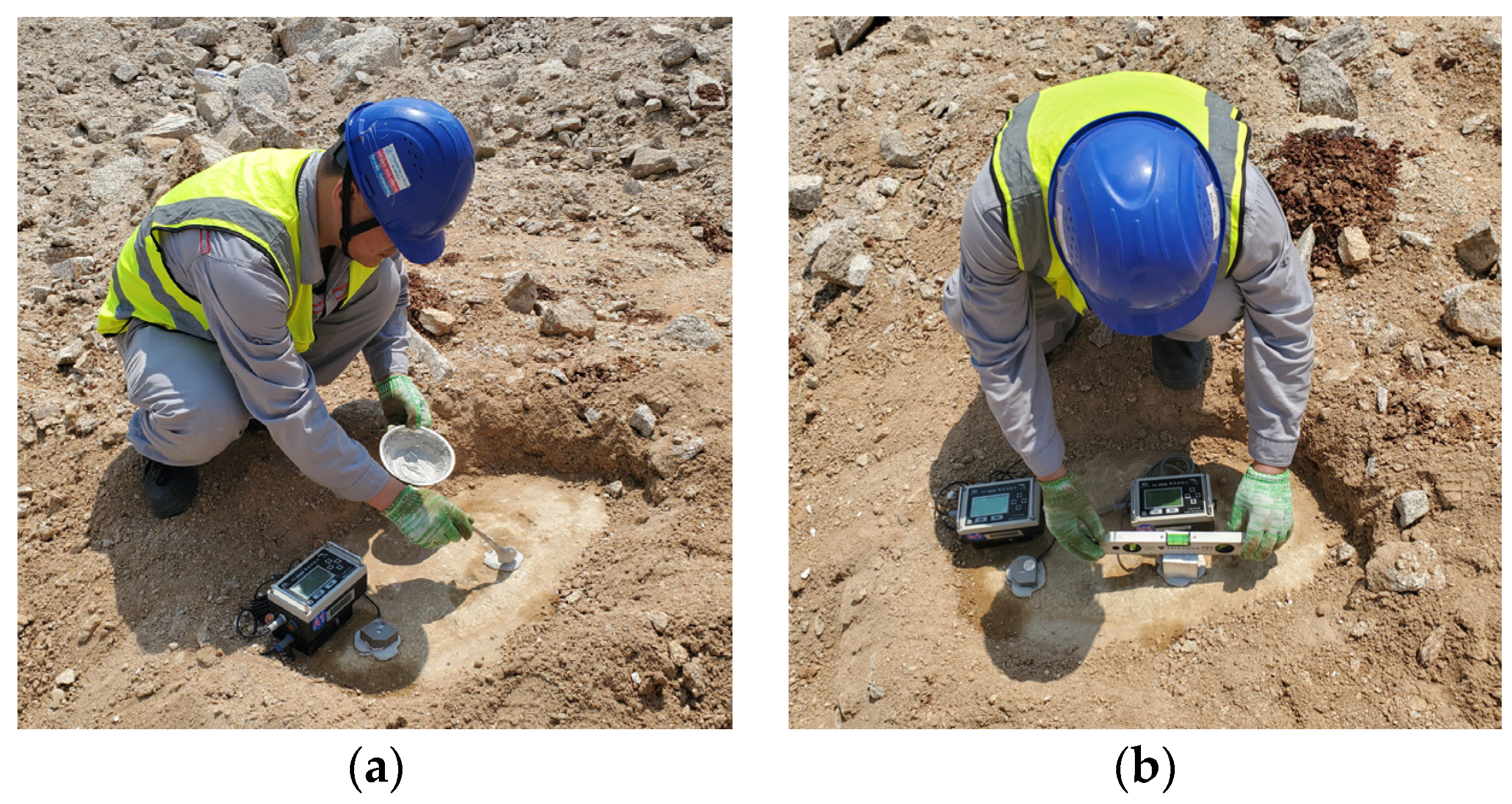
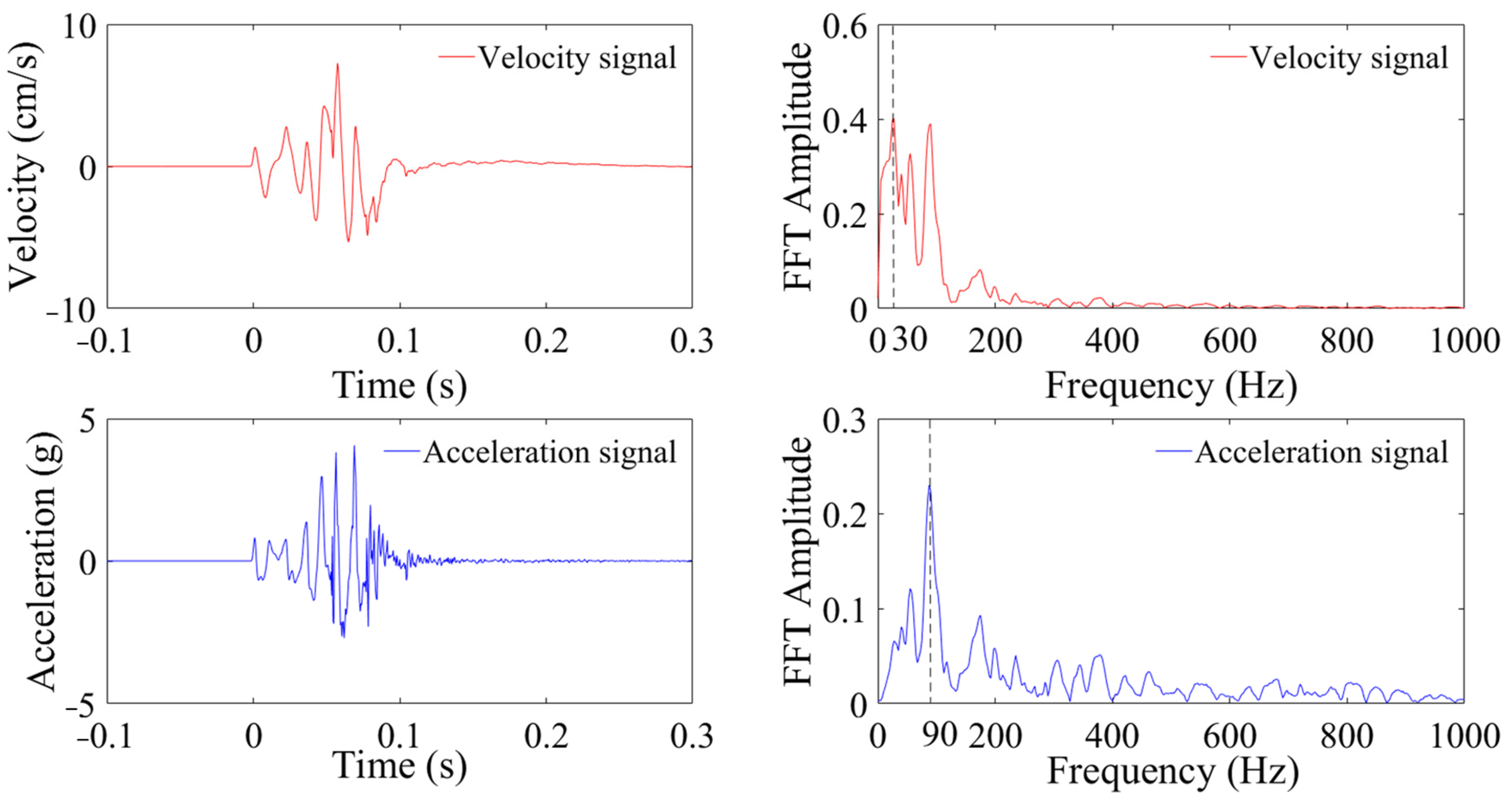
2.2. Seismometer Performance
3. Velocity and Acceleration Transformation
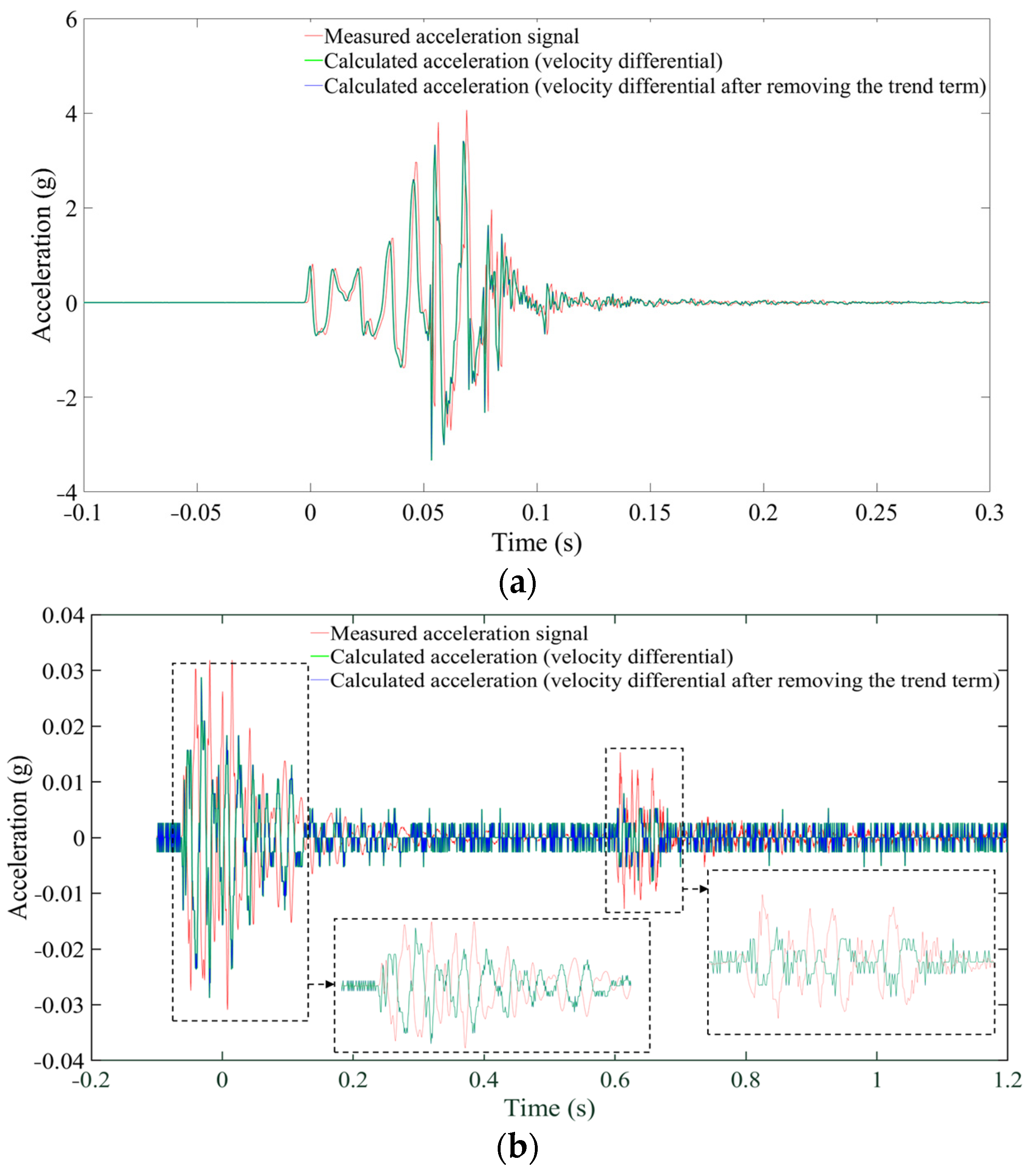
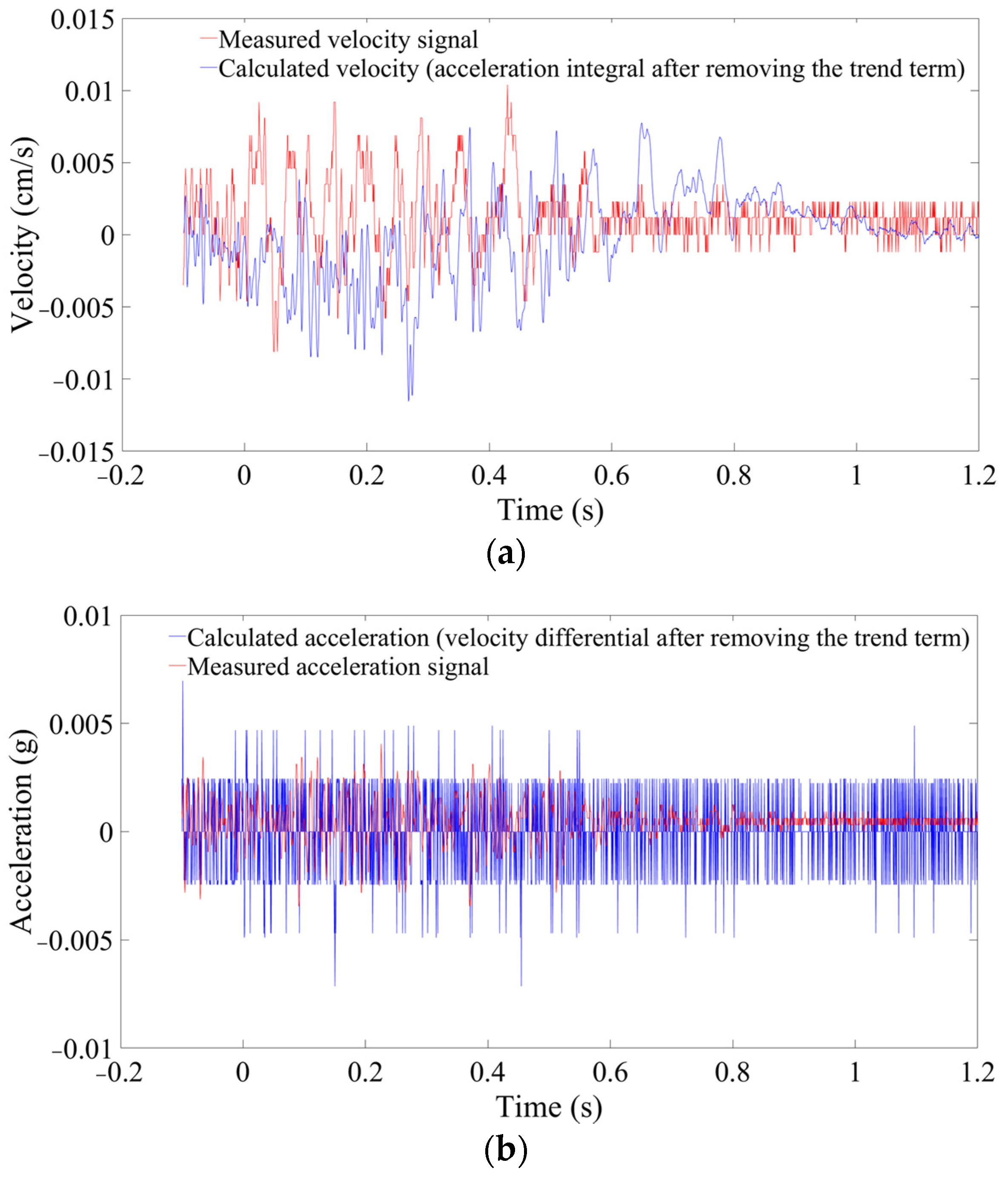
3.1. Removal of the Trend Term
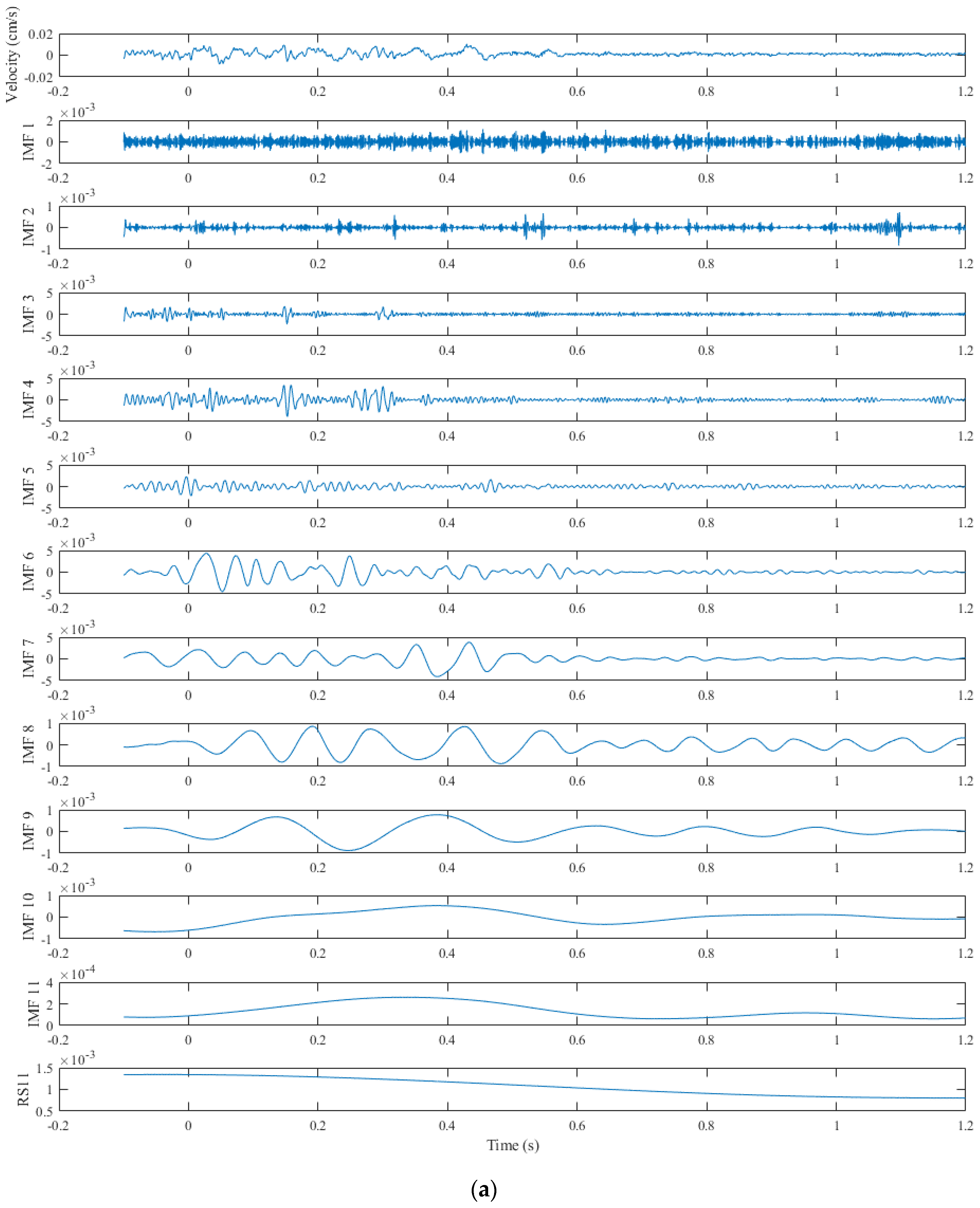
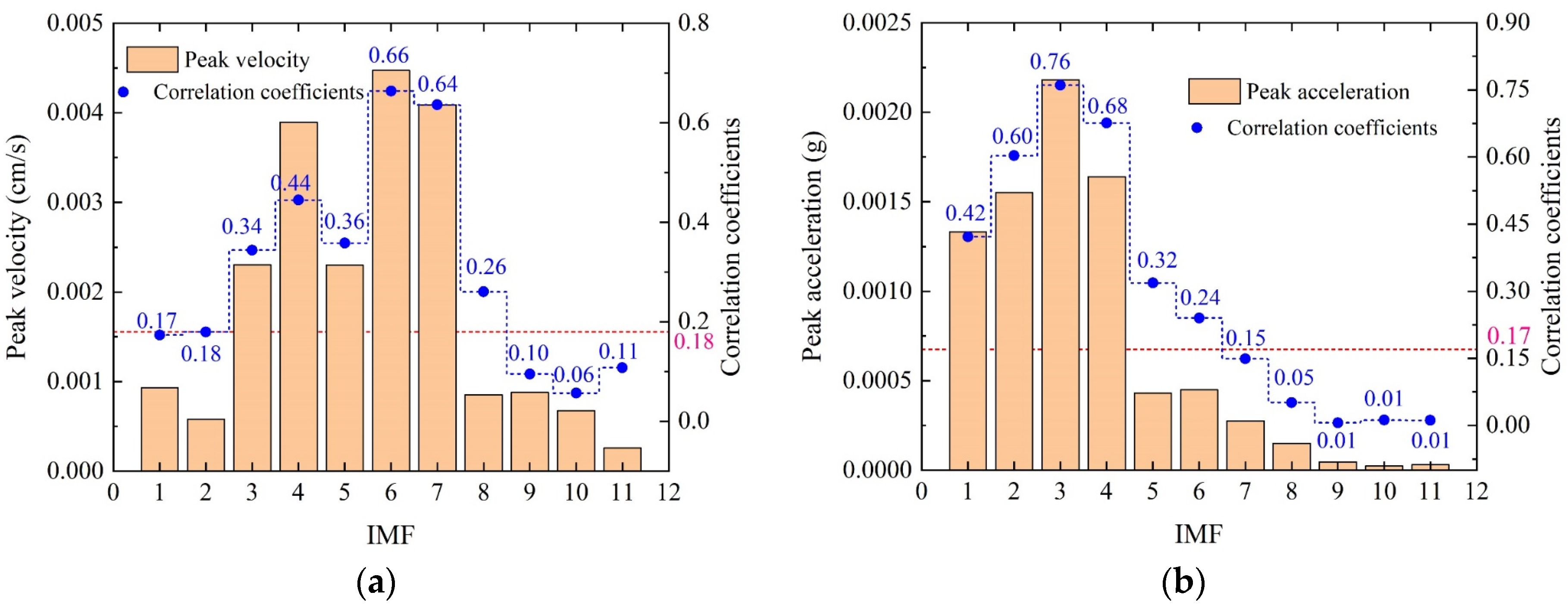
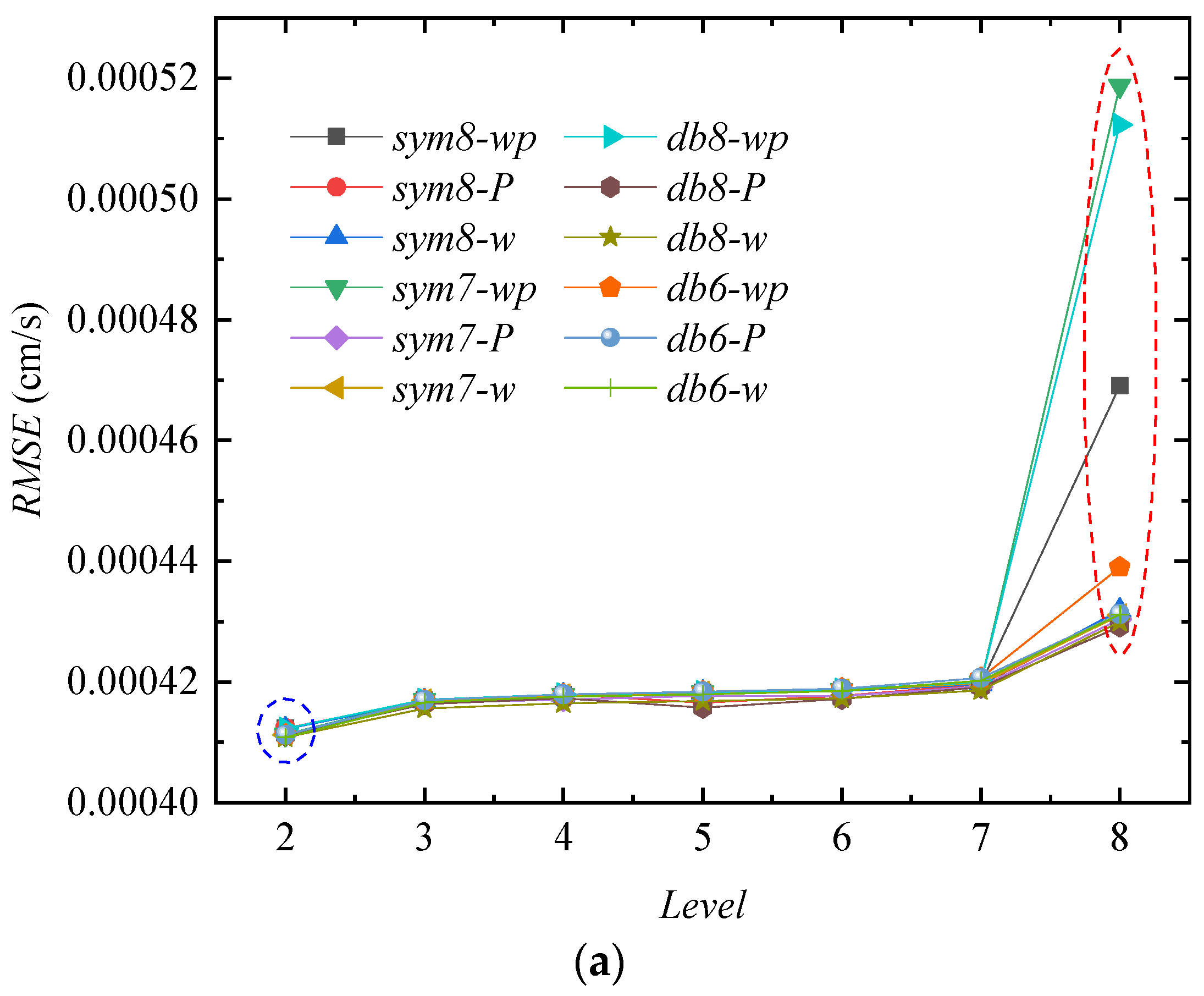
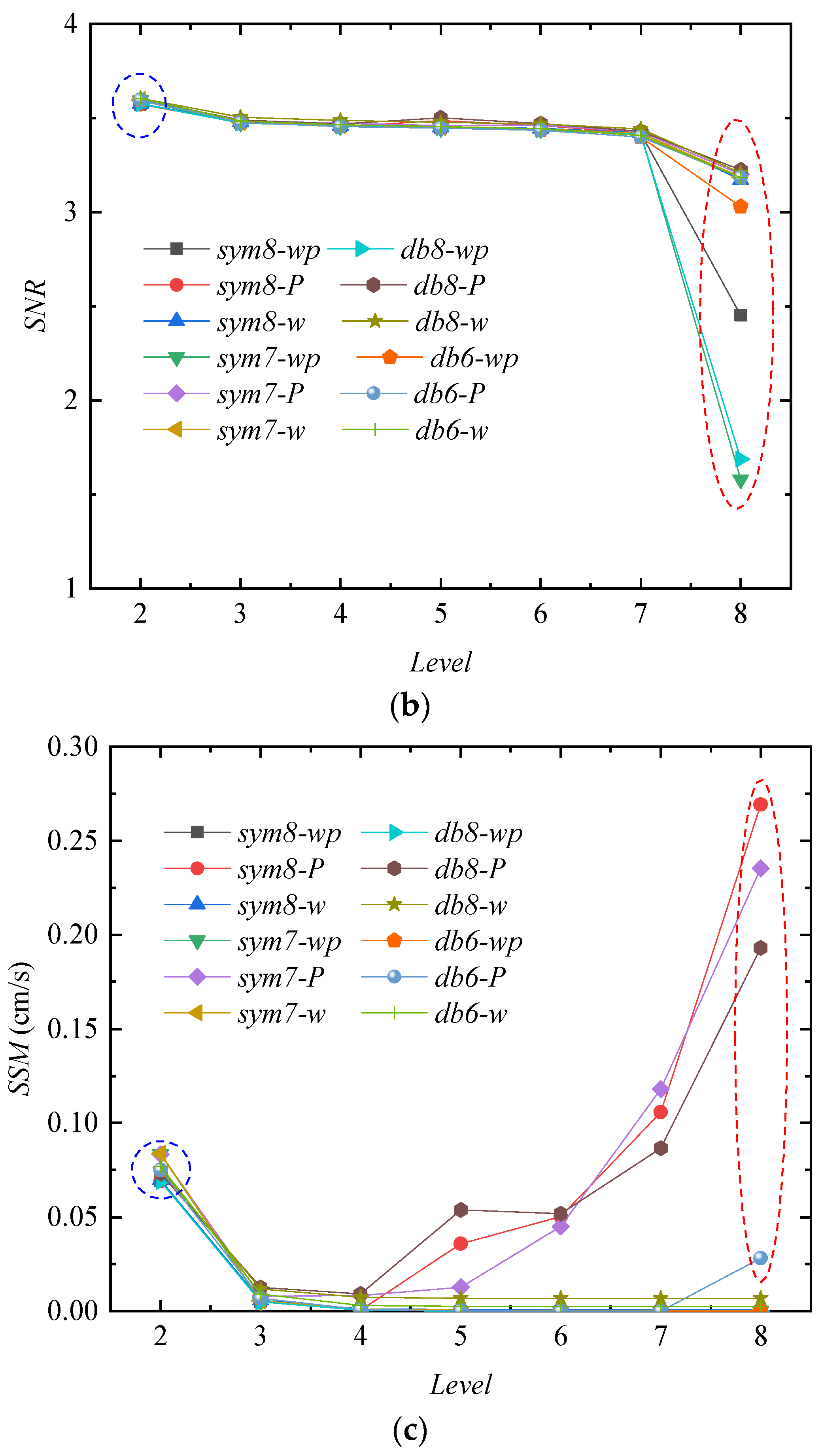
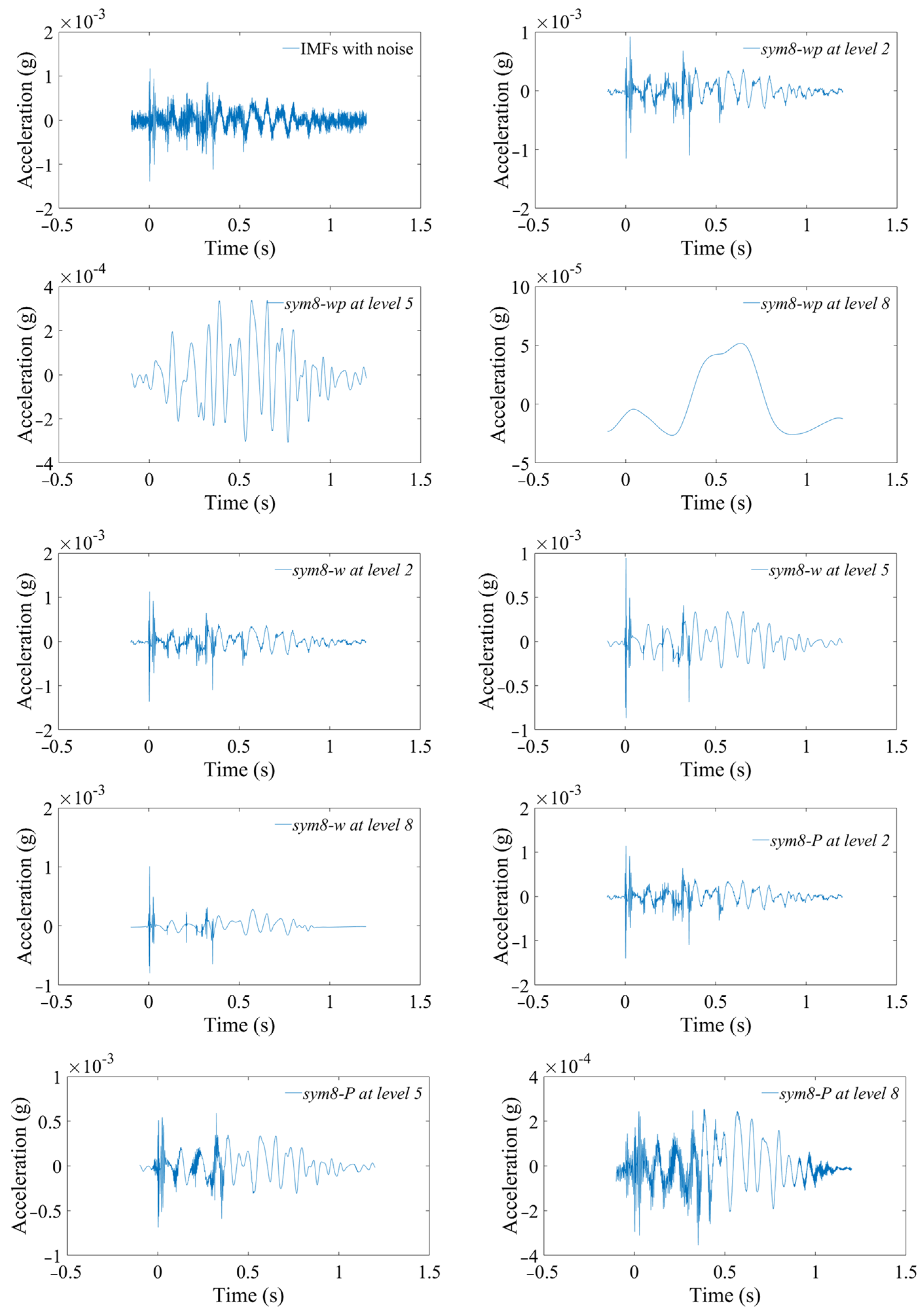
3.2. Noise Reduction
4. The Ratio of Velocity Amplitude to Acceleration Amplitude
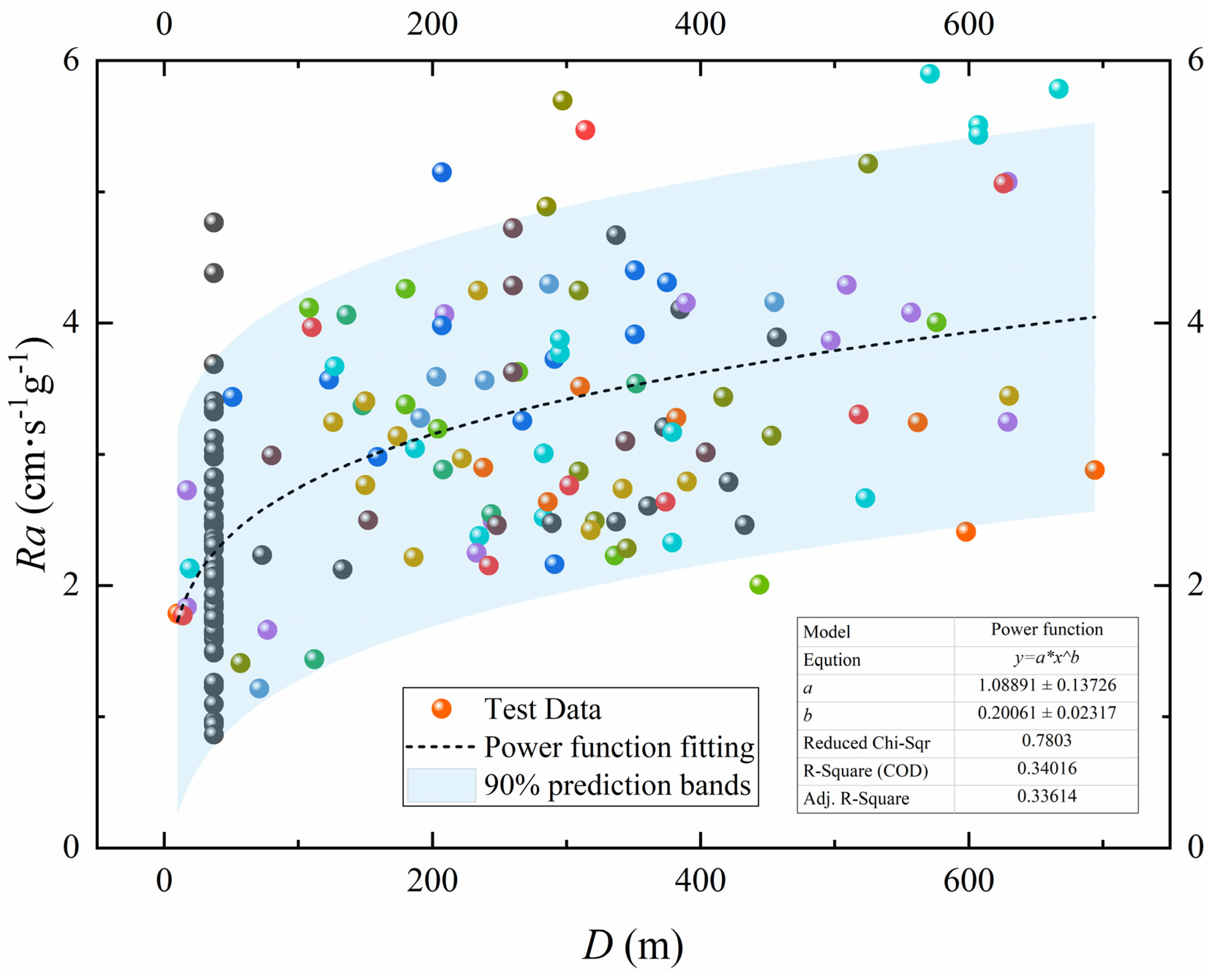
4.1. Influence of the Propagation Distance
4.2. Influence of the Blasting Method
5. Velocity and Acceleration Attenuation Laws
6. Discussion
7. Conclusions
- (1)
- For the transient, nonlinear, and wide-frequency characteristics of blast vibration signals, the combined CEEMDAN and WD/WDP method of noise reduction is presented. Based on the evaluation indexes (RMSE, SNR, and SSM), the optimal decomposition levels and wavelet basis functions suitable for different signals are determined.
- (2)
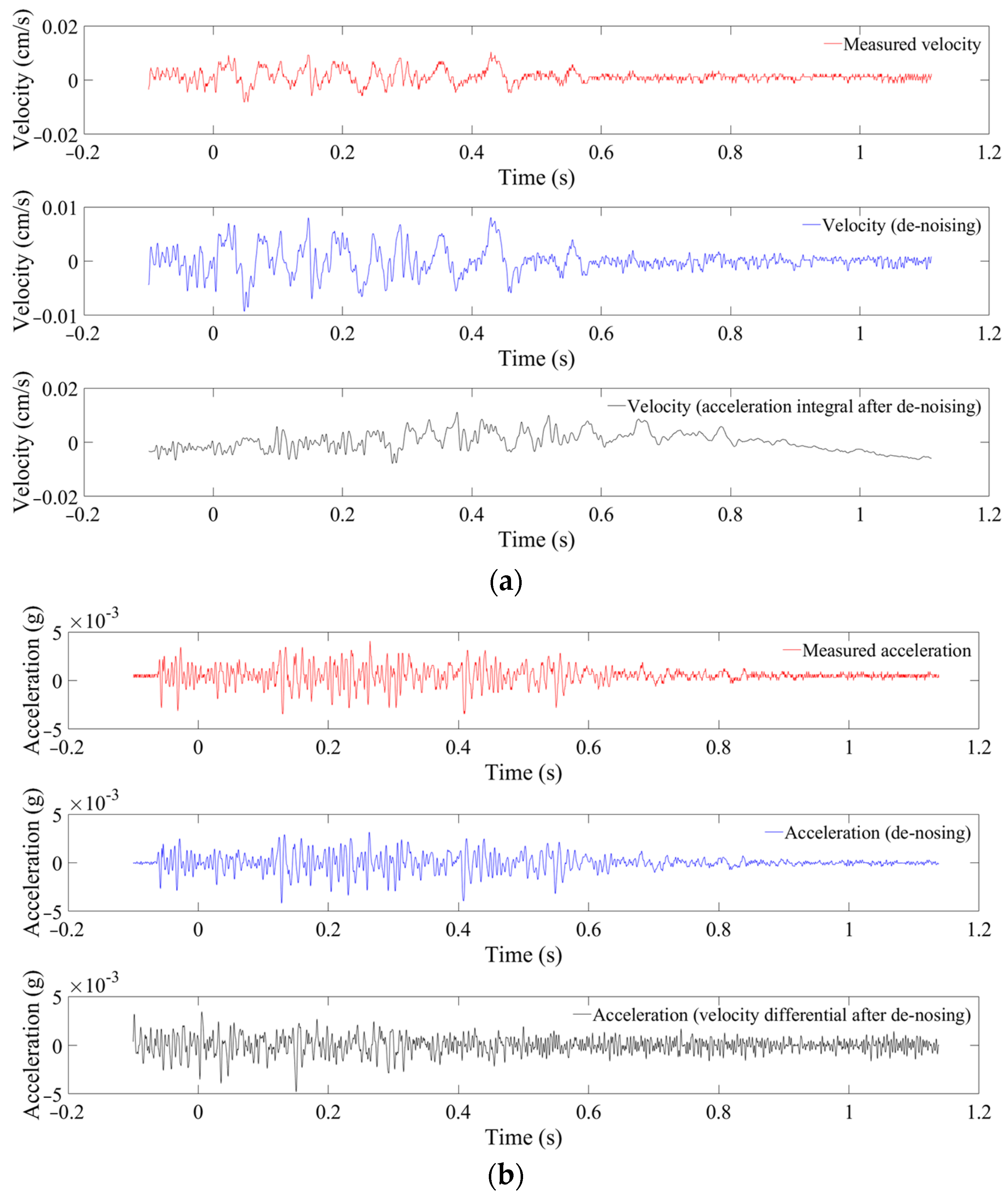
- Vibration velocity and acceleration can be derived from each other according to differentiating and integrating. However, due to the inevitable noise in the monitored signals and the non-periodic, non-linear, and non-stationary characteristics of blast vibration signals, there is a certain discrepancy between the theoretical derivation and the measured signal. The results in this paper show that the relative error is concentrated between −25% and 30%. The removal of trend terms and noise reduction will greatly improve the accuracy of the transformation.
- (3)
- There is a power function relationship between Ra and D, and Ra tends to be flat after increasing gradually. In addition, Ra shows a negative correlation with the maximum charge per delay. Due to the higher frequency of pre-splitting blasting, its Ra is lower than that of bench blasting at the same propagation distance.
- (4)
- The attenuation exponent of acceleration is greater than that of velocity, indicating that the attenuation of acceleration, along with the propagation distance, is greater than that of velocity, resulting in a slow increase in Ra.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Duvall, W.I.; Fogelson, D.E. Review of Criteria for Estimating Damage to Residences from Blasting Vibrations; Report for U.S. Bureau of Mines (USBM) No. BM-RI-5968; Bureau of Mines: College Park, MD, USA, 1962. [Google Scholar]
- IS 6922:1973; Criteria for Safety and Design of Structures Subject to Underground Blast. Bureau of Indian Standards: New Delhi, Indian, 1973.
- Lu, W.B.; Luo, Y.; Chen, M.; Shu, D.Q. An introduction to Chinese safety regulations for blasting vibration. Environ. Earth Sci. 2012, 67, 1951–1959. [Google Scholar] [CrossRef]
- Zou, D. Blasting Safety for Surface Blasting. In Theory and Technology of Rock Excavation for Civil Engineering; Metallurgical Industry Press: Beijing, China, 2017; pp. 343–377. [Google Scholar]
- Yilmaz, S.; Tama, Y.S.; Bilgin, H. Seismic performance evaluation of unreinforced masonry school buildings in Turkey. J. Vib. Control 2013, 19, 2421–2433. [Google Scholar] [CrossRef]
- Li, Z.; Tu, J.; Zhang, J. Seismic response of high-rise buildings using long short-term memory intelligent decentralized control system. J. Vib. Control. 2023, 29, 1981–1995. [Google Scholar] [CrossRef]
- Gao, J.Q.; Jiang, Z.K.; Zhang, S.J.; Mao, Z.N.; Shen, Y.; Chu, Z.Q. Review of Magnetoelectric Sensors. Actuators 2021, 10, 109. [Google Scholar] [CrossRef]
- Liu, G.Y.; Liao, H.P.; Zhao, X.; Cao, J.Y.; Liao, W.H. A self-powered magnetoelectric tactile sensor for material recognition. Sens. Actuat. A Phys. 2024, 366, 114942. [Google Scholar] [CrossRef]
- Yang, B.T.; Yang, Y.K. A new angular velocity sensor with ultrahigh resolution using magnetoelectric effect under the principle of Coriolis force. Sens. Actuat. A Phys. 2016, 238, 234–239. [Google Scholar] [CrossRef]
- Li, F.; Song, Z. Vibration analysis and active control of nearly periodic two-span beams with piezoelectric actuator/sensor pairs. Appl. Math. Mech. Engl. Ed. 2015, 36, 279–292. [Google Scholar] [CrossRef]
- Tian, B.; Liu, H.; Yang, N.; Zhao, Y.; Jiang, Z. Design of a Piezoelectric Accelerometer with High Sensitivity and Low Transverse Effect. Sensors 2016, 16, 1587. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.-K.; Han, S.-H.; Park, K.-H.; Park, J.-J.; Kim, W.-W.; Hwang, W.-J.; Lee, G.-J. Design Optimization of Bulk Piezoelectric Acceleration Sensor for Enhanced Performance. Sensors 2019, 19, 3360. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.G.; Zhang, G.D.; Yang, D.K.; Dong, C.A.; Du, Q.H. Analysis and application of phase difference between velocity geophone and piezoelectric geophone. Prog. Geophys. 2015, 30, 454–459. [Google Scholar]
- Berg, G.V.; Housner, G.W. Integrated velocity and displacement of strong earthquake ground motion. Bull. Seismol. Soc. Am. 1961, 51, 175–189. [Google Scholar] [CrossRef]
- Hamming, R.W. Digital Filters, 3rd ed.; Dover Publications, Inc.: New York, NY, USA, 1989; pp. 164–181. [Google Scholar]
- Yang, J.; Li, J.B.; Lin, G. A simple approach to integration of acceleration data for dynamic soil–structure interaction analysis. Soil Dyn. Earthq. Eng. 2006, 26, 725–734. [Google Scholar] [CrossRef]
- Lotfi, B.; Huang, L. An approach for velocity and position estimation through acceleration measurements. Measurement 2016, 90, 242–249. [Google Scholar] [CrossRef]
- Sachan, S.; Shukla, S.; Singh, S.K. Two level de-noising algorithm for early detection of bearing fault using wavelet transform and zero frequency filter. Tribol. Int. 2019, 143, 106088. [Google Scholar] [CrossRef]
- Li, C.; Liu, X.; Yu, K.; Wang, X.; Zhang, F. Debiasing of seismic reflectivity inversion using basis pursuit de-noising algorithm. J. Appl. Geophys. 2020, 177, 104028. [Google Scholar] [CrossRef]
- Maria, H.M.; Jossy, A.M.; Malarvizhi, G.; Jenitta, A. Analysis of lifting scheme based Double Density Dual-Tree Complex Wavelet Transform for de-noising medical images. Optik 2021, 241, 166883. [Google Scholar] [CrossRef]
- Yin, T.T.; Jia, F.X.; Wang, X.M. Moving horizon based wavelet de-noising method of dual-observed geomagnetic signal for nonlinear high spin projectile roll positioning. Def. Technol. 2020, 16, 417–424. [Google Scholar] [CrossRef]
- Yu, C.; Yue, H.Z.; Li, H.B.; Xia, X.; Liu, B. Scale model test study of influence of joints on blasting vibration attenuation. Bull. Eng. Geol. Environ. 2021, 80, 533–550. [Google Scholar] [CrossRef]
- Ayenu-Prah, A.; Attoh-Okine, N. A criterion for selecting relevant intrinsic mode functions in empirical mode decomposition. Adv. Adapt. Data Anal. 2010, 2, 1–24. [Google Scholar] [CrossRef]
- Zhong, G.S.; Ao, L.P.; Zhao, K. Influence of explosion parameters on wavelet packet frequency band energy distribution of blast vibration. J. Cent. South Univ. 2012, 19, 2674–2680. [Google Scholar] [CrossRef]
- Ling, T.H.; Zhang, S.; Chen, Q.Q.; Li, J. Wavelet basis construction method based on separation blast vibration signal. J. Cent. South Univ. 2015, 22, 2809–2815. [Google Scholar] [CrossRef]
- Chen, G.; Li, Q.Y.; Li, D.Q.; Wu, Z.Y.; Liu, Y. Main frequency band of blast vibration signal based on wavelet packet transform. Appl. Math. Model. 2019, 74, 569–585. [Google Scholar] [CrossRef]
- Zheng, Y.; Yue, J.; Sun, X.F.; Chen, J. Studies of Filtering Effect on Internal Solitary Wave Flow Field Data in the South China Sea Using EMD. Appl. Phys. Lett. 2012, 518–523, 1422–1425. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Charge Weight (kg) | Maximum Charge per Delay (kg) | Blast Hole Diameter (mm) | Charge Diameter (mm) | Row Spacing (m) | Hole Spacing (m) | Hole Depth (m) | Stemming Length (m) |
|---|---|---|---|---|---|---|---|
| 48–864 | 4–12 | 76/90 | 32/70 | 1.8–2.5 | 1–3 | 1.3–12.77 | 1.0–3.9 |
| Distance (m) | Relative Error Translated to Velocity (%) | Relative Error Translated to Acceleration (%) | ||
|---|---|---|---|---|
| Trend Item Not Removed | Remove Trend Item | Trend Item Not Removed | Remove Trend Item | |
| 10 | 7.75 | 1.67 | −16.03 | −16.04 |
| 235 | 52.02 | 28.13 | −9.64 | −9.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.; Wu, J.; Li, H.; Ma, Y.; Wang, C. Study on the Equivalence Transformation between Blasting Vibration Velocity and Acceleration. Sensors 2024, 24, 1727. https://doi.org/10.3390/s24061727
Yu C, Wu J, Li H, Ma Y, Wang C. Study on the Equivalence Transformation between Blasting Vibration Velocity and Acceleration. Sensors. 2024; 24(6):1727. https://doi.org/10.3390/s24061727
Chicago/Turabian StyleYu, Chong, Jiajun Wu, Haibo Li, Yongan Ma, and Changjian Wang. 2024. "Study on the Equivalence Transformation between Blasting Vibration Velocity and Acceleration" Sensors 24, no. 6: 1727. https://doi.org/10.3390/s24061727