Abstract
With the rapid development of 3D reconstruction, especially the emergence of algorithms such as NeRF and 3DGS, 3D reconstruction has become a popular research topic in recent years. 3D reconstruction technology provides crucial support for training extensive computer vision models and advancing the development of general artificial intelligence. With the development of deep learning and GPU technology, the demand for high-precision and high-efficiency 3D reconstruction information is increasing, especially in the fields of unmanned systems, human-computer interaction, virtual reality, and medicine. The rapid development of 3D reconstruction is becoming inevitable. This survey categorizes the various methods and technologies used in 3D reconstruction. It explores and classifies them based on three aspects: traditional static, dynamic, and machine learning. Furthermore, it compares and discusses these methods. At the end of the survey, which includes a detailed analysis of the trends and challenges in 3D reconstruction development, we aim to provide a comprehensive introduction for individuals who are currently engaged in or planning to conduct research on 3D reconstruction. Our goal is to help them gain a comprehensive understanding of the relevant knowledge related to 3D reconstruction.
1. Introduction
Vision, serving as one of the most important capabilities of human beings, enables humans to recognize and interact with the 3D physical world. The digital representation and construction of 3D scenes in computers form the foundation for many crucial applications today. This is evident from the increasing number of relevant papers published in well-known international conferences and journals, showcasing the degree of research development in this field. In many cases, three-dimensional reconstruction technology provides an alternative to replicating real objects for precious or delicate cultural heritage artifacts, avoiding the overly invasiveness that traditional plaster casting techniques may bring. It is also useful for protecting historical relics, cultural heritage, etc. plays an extremely important role [1]. In the game and movie industry, dynamic 3D scene reconstruction can be used for real-time rendering to enhance the viewing experience of games and movies [2]. In medical imaging, it is used to construct patient-specific organ models for surgical planning [3,4,5]. In robot navigation, dynamic 3D scene reconstruction enables the robot to better comprehend its surrounding environment and improve navigation accuracy and safety [6]. In the field of industrial design, 3D reconstruction technology can assist in creating precise digital models by capturing the 3D geometric information of real objects. It aids users in comprehending the dynamic changes in data [7]. By capturing the user’s body shape, needs, or preferences, designers can personalize customized products [8]. Additionally, it can capture and record the geometry and structure of actual equipment or mechanical parts, providing a digital foundation for equipment maintenance [9].
Different from traditional manual 3D modeling using Computer-Aided Design (CAD) software or Digital Content Creation (DCC) software, 3D reconstruction technology aims to begin with sensor input, such as pictures, point clouds, and other data. The corresponding 3D structure and scene are automatically reconstructed without manual intervention. In the field of photogrammetry, German scientists Albrecht Meydenbauer and Carl Pulfrich made significant contributions to image measurement and photogrammetry from the late 19th to the early 20th century. Their work provided a theoretical basis for subsequent 3D measurement and reconstruction [10]. The photogrammetry method mainly captures images through cameras and then uses image processing and measurement techniques to obtain the 3D information of the target object. In the 1960s, MIT’s Roberts used computer programs to extract 3D structures of polyhedra, such as cubes, wedges, and prisms, from digital images. After studying multiple visual images of the building block world system, he believed that in the building block world, 3D objects can be simply represented by two-dimensional shape combinations [11]. This pioneering research laid the foundation for studying 3D reconstruction to understand 3D scenes. In the 1970s, Marr and Poggio of the Massachusetts Institute of Technology proposed a theoretical framework for how the visual system reconstructs 3D structures from two-dimensional images [12]. The core of this theory is to eliminate false matches, integrate previous advances in stereo matching, and posit that the difficulty of stereo matching is related to image parallax. The range is proportional to the resolution. Shortly after Marr proposed this theory, Grimson [13] further implemented the algorithm and demonstrated its applicability to natural image matching.
3D reconstruction is divided into explicit and implicit expression methods based on different approaches, offering diverse perspectives and processing techniques for data obtained from the real world. Explicit expression refers to a representation method that clearly defines geometric shapes and structures to directly describe the external or internal geometry of an object. It is a discretized expression, which inevitably leads to a loss of information, necessitating the development of new processes. There is a significant overhead when synthesizing images from different perspectives. Implicit expression describes the geometry of an object through a function instead of directly providing its geometric representation. In implicit representation, the geometry of the object is implicitly defined by an implicit function or implicit surface equation, and the function is used to solve the problem. Values can be obtained from points on the surface.
1.1. Explicit Expression
The main methods for displaying data include point clouds, voxels, and meshes. Point clouds consist of discrete data collected from various sensors or scanning devices. It is used to represent the external surface of an object or the spatial structure of a scene. A point cloud is an unordered collection of points in 3D space. Divide the 3D space into uniform cubic units. Each cubic unit is called a voxel. Each voxel can contain information representing spatial attributes, such as color, density, or depth. Voxels are commonly utilized in medical image processing, computational fluid dynamics, and other fields. Voxel storage is used to represent the structure and attributes within a space, but it has high space complexity. The mesh is composed of connected vertices, edges, and faces. The mesh model can be composed of triangles, quadrilaterals, or higher-order polygons, and can describe most topological structures. It can accurately represent complex geometric shapes and details. The surface described by each triangle is planar, making it suitable for numerous computer graphics and engineering applications where triangle meshes are commonly used. This ensures that the projection is always convex and easy to rasterize.
1.2. Implicit Expression
Implicit expression does not require explicit storage of geometric data; so, it offers advantages in saving storage space and processing complex geometries. However, computing the value of an implicit function can be time-consuming, and understanding and manipulating the implicit expression can be challenging. Implicitly represented 3D models can be determined by continuous decision boundaries, enabling shape recovery at any resolution. Commonly used implicit representations include implicit surfaces, Signed Distance Function (SDF), Occupancy Field, Radiance Field, etc.
Implicit surfaces can be composed of equations of curves or surfaces, such as Bézier curves, Bézier surfaces, NURBS, etc. Implicit surfaces can offer more precise and adaptable representations, making them suitable for scenarios where accurately modeling and designing simple geometric shapes is essential. For complex geometric structures, intricate mathematical descriptions are necessary. In SDF, the value of each point represents the signed distance from the point to the nearest object surface. This distance can be a positive value (indicating that the point is outside the object), a zero value (indicating that the point is on the object’s surface), or a negative value (indicating that the point is on the surface of the object). The form of SDF can usually be expressed as D(p), where p represents the point coordinates in 3D space. SDF implicitly represents the geometry of an object through a function instead of directly providing the geometry of the object. The occupancy field is a mapping from one vector to another vector or a number. The field in space can be considered as the mapping from a “space midpoint” to “point attributes”; in other words, each point corresponds to the attributes of that point. The radiation field maps a point in space, a ray emitted by the point to the density value of the point, and the color value corresponding to the direction of the ray [14].
In practical applications, explicit and implicit expressions are often used in combination [15]. The comprehensive utilization of the advantages of both explicit and implicit expressions can enhance the modeling, analysis, and processing of 3D models. Explicit expressions offer advantages in intuitiveness and accuracy, while implicit expressions have unique features in flexibility and storage efficiency. Choosing the appropriate expression or comprehensive application based on specific application requirements is crucial. It is an impossible task to cover all possible 3D reconstruction techniques in this survey; so, we have chosen representative techniques among them.
The remainder of this paper is structured as follows: Section 2 provides an overview of static 3D reconstruction methods, details traditional static 3D reconstruction methods, and includes computer graphics techniques related to 3D reconstruction. Section 3 summarizes and discusses dynamic 3D reconstruction methods, including the currently popular 3DGS. Section 4 introduces 3D reconstruction based on machine learning in detail, focusing on the application of deep learning technology in 3D reconstruction. Section 5 introduces commonly used datasets for 3D reconstruction, including human bodies and indoor and outdoor scenes. Section 6 discusses the application prospects and challenges of 3D reconstruction technology. Finally, Section 7 summarizes the work presented in this paper.
2. Traditional Static 3D Reconstruction Methods
Most creatures in nature, including humans, rely on vision to perceive and reconstruct 3D objects in the physical world. 3D reconstruction can be categorized into sparse reconstruction and dense reconstruction based on the density of information acquired. Sparse reconstruction focuses on obtaining the accurate 3D positions of a small number of key points or feature points in the scene. It utilizes techniques such as feature point matching and key point extraction to represent the geometric shape of the entire scene through these discrete points. Dense reconstruction aims to obtain the accurate 3D coordinates of each pixel in the scene. By estimating the depth of each pixel in the image, the system generates a dense depth map, point cloud, or voxel, enabling high-density reconstruction of the entire scene. Develop a model to create a comprehensive description of the entire scene.
In 1997, Varady et al. categorized data acquisition methods into two types: contact and non-contact [16]. The contact method uses specific instruments to quickly and directly measure the 3D information of the scene [17], which mainly includes trigger measurement and continuous measurement. The contact method can only be used in situations where the instrument can come into contact with the measurement scene, such as coordinate measuring machines (CMMs), etc. The non-contact method utilizes image analysis models to acquire data from the measured object without physically touching it. The non-contact 3D reconstruction process involves capturing an image sequence using visual sensors (one or more cameras). Subsequently, relevant information is extracted, and finally, reverse engineering modeling is conducted using this information to reconstruct the 3D structural model of the object [18]. In 2005, Isgro et al. [19] divided non-contact methods into two categories: active and passive.
2.1. Active 3D Reconstruction Methods
Active methods of vision-based 3D reconstruction involve mechanical or radiometric interference with the reconstructed object to acquire depth maps. These methods include structured light, laser rangefinders, and other active sensing technologies. Among them, 3D reconstruction technologies based on active methods mainly include the laser scanning method [20,21], industrial computed tomography (CT) scanning [22], structured light method [23], time-of-flight (TOF) technology [24], shadow method [25], etc. These methods primarily utilize optical instruments to scan the surface of an object and reconstruct the 3D structure by analyzing the scanned data.
2.1.1. Laser Scanning
The system scans the target surface with a laser beam emitted by a laser scanner and LiDAR [26]. It combines the controlled steering of the laser beam with a laser rangefinder, measures the reflection or scattering of the laser, and calculates the distance on the object’s surface. This method enables the rapid capture of the surface shape of objects, buildings, and landscapes by conducting distance measurements in all directions [27,28]. A 3D model created by laser scanning data collected with 3D laser scanning technology is represented as a point cloud. 3D laser scanning can rapidly capture millions of point clouds, providing an accurate representation of the characteristics of the measured target surface. It has the characteristics of high precision and high density, providing a guarantee for 3D modeling and visualization. However, it is not suitable for transparency and reflection. Surface objects are less efficient. The process of 3D reconstruction using laser scanning method is shown in Figure 1.
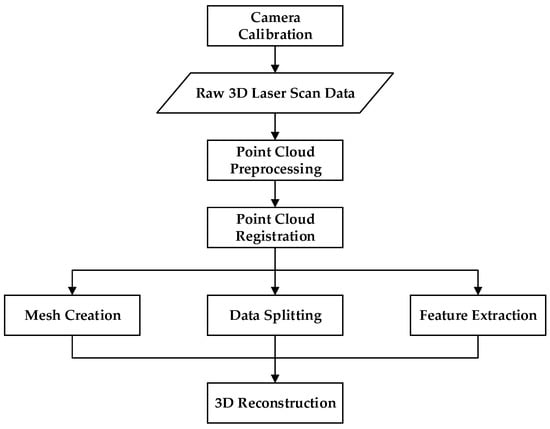
Figure 1.
3D reconstruction process based on laser scanning.
In 1999, Yang et al. [29] proposed triangulation laser scanning, in which the laser point, camera, and laser emitter form a triangle. They discussed in detail the factors that affect the accuracy of laser scanning measurements based on the principle of large-scale curved surface measurements [30]. Boehler et al. [31] analyzed and verified the impact of using different types of 3D laser scanners on experimental results. Voisin et al. [32] studied the impact of ambient light on 3D laser scanning. Tachella et al. proposed using coded aperture [33] to compress data by considering a subset of wavelengths for each pixel to achieve real-time 3D reconstruction. The laser line [34] reflected from the front surface of the target is used to enhance the accuracy of stereoscopic vision reconstruction of transparent or translucent objects.
The laser scanning method is primarily used in terrain surveying, architectural scanning, cultural relic protection, manufacturing, virtual reality, and other fields. Among them, the laser scanning method is a fundamental component of Building Information Modeling [35]. It can create 3D records and archives of engineering construction, providing a real data foundation for subsequent maintenance. The articulated arms of modern coordinate measuring machines and robots are equipped with non-contact laser scanners. 3D holographic projection technology [36] uses the principle of holographic imaging to present optical information in a 3D form and generate realistic 3D images in space, allowing observers to experience real 3D visuals.
2.1.2. CT Scanning
A CT scan is typically an X-ray computed tomography scan, which utilizes radiation to produce a 3D internal and external representation of the scanned object [37,38]. Some of the primary applications of CT scanning include defect detection, failure analysis, metrology, assembly analysis, and reverse engineering applications [39].
In 1972, Godfrey Hounsfield invented the CT scanner for medical imaging, thereby introducing CT scanning technology. Many advancements in CT scanning have allowed it to be used for metrology in the industrial field [40], in addition to its primary application for visual inspection in the medical field (medical CT scanning). Lorensen et al. proposed the Marching Cubes algorithm [41] and outlined the fundamental process of 3D surface reconstruction of medical images. Evans et al. [42] directly converted the 3D image data from X-ray computed tomography into a grid to model complex geometries, such as composite materials, or to accurately represent precision components at the microscopic scale. Uhm et al. aggregated reconstructed 3D models from multiple CT phases by aligning multiphase CT images [43] to generate a fused model with well-defined surfaces.
2.1.3. Structured Light
The structured light method involves projecting a specific pattern of light onto the scene and using a camera to capture the shape and deformation of the light spot. This process helps to infer the 3D structure of the object’s surface. The principle of structured light triangulation is shown in Figure 2. In 2000, Kowarschik et al. [44] utilized a 3D measurement system based on the grating structure method to address the occlusion issue of structured light in measurements. In order to ensure the quality of the light strip image, Zhang et al. [45] obtained multiple light strips by controlling the exposure time, took pictures, and then fused the pictures to create a light stripe image with enhanced quality. Ekstrand et al. [46] estimated the exposure time by analyzing the object’s surface, resulting in an improved light stripe image. Yang et al. [47] achieved a better light stripe image by adding controllable Liquid Crystal on Silicon (LCoS) for imaging with a wider dynamic range of the camera. Jiang et al. [48] utilized a cubic polynomial curve to fit the center point of the line structure light obtained through the weighted gray center of gravity method. This approach yielded smooth pixel coordinates of the light bar’s centerline, enhancing the accuracy of center extraction. The structured light method has strong real-time performance in 3D reconstruction [9], but its effectiveness is limited in environments with insufficient or excessive brightness. Santolaria et al. [49] integrated the line-structured light sensor and the articulated arm measurement system and provided a method for system integration. The use of mechanical projectors [50] improves the real-time performance of 3D reconstruction. Liu et al. utilized a rapid rotating mechanical projector (RMP) [51], which can be obtained with a shorter camera exposure time through the error diffusion binary encoding method and chrome plating technology. High-quality projected fringes, while introducing a probability distribution function algorithm to correct errors, ensuring the accuracy of the corresponding 3D shape measurement system. Zhang et al. utilized a white plane calibration target matrix [52] to streamline the parallel-axis structured light system and enhance the accuracy of the 3D reconstruction model.
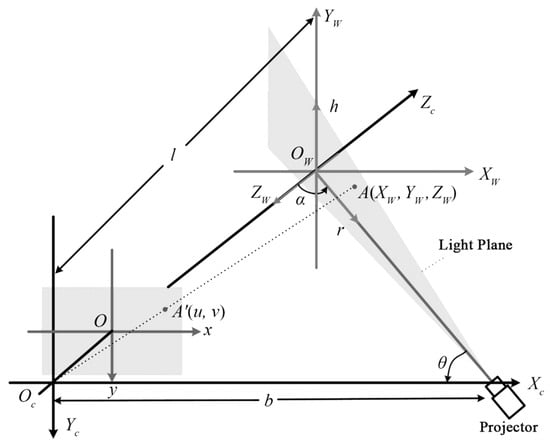
Figure 2.
Principle diagram of structured light triangulation [18].
2.1.4. TOF
TOF technology continuously emits light pulses (typically invisible light) towards the object under observation and then employs a sensor to detect the light reflected back from the object. It determines the target distance by measuring the flight (round trip) time of the light pulse. It is commonly used in cameras and lasers. The TOF method is divided into Pulsed Modulation and Continuous Wave Modulation based on different modulation techniques. It is commonly used in outdoor 3D scanning, virtual reality, autonomous driving, and human posture detection.
Stipes et al. [53] utilized the Iterative Closest Point (ICP) algorithm to align the data from two TOF frames and executed the iterative process of ICP through the acquired 3D point cloud. Chua et al. [54] calculated the noise-weighted average range of the signal detection threshold and system noise to mitigate the impact of noise, demonstrating improved accuracy in distance reconstruction.
The 3D reconstruction method based on TOF has excellent real-time performance and is well-suited for complex environments. The current consumer-grade TOF depth cameras include Microsoft’s Kinect v2 in Redmond, WA, USA, MESA’s SR4000 in Zurich, Switzerland, Google Project Tango’s PMD Tech in San Jose, CA, USA, etc. These products have already been used in somatosensory recognition and gesture recognition. Environment modeling and other aspects have found numerous applications, with one of the most typical examples being Kinect v2.
2.1.5. Photometric Stereo
It utilizes variations in illumination angles from multiple light sources to deduce the surface’s normal and depth by analyzing the changes in brightness on the object. It is suitable for objects with complex topological structures but is sensitive to lighting conditions. Woodham originally proposed Photometric Stereo in 1980 [55], and the special case where the data are a single image is called “shadow shape”, which was compared and analyzed by BKP Horn in 1989 [56]. For purely textureless objects with unknown surface reflectivity, especially non-Lambertian objects [57], use low-rank/RANSAC outlier rejection [58,59], factorization [60], and other methods. Karami et al. [61] utilized photogrammetry to produce geometric information and then combined it with the high spatial resolution of photometric stereo to obtain surface depth information. Ju et al. applied dual-position threshold normalization preprocessing to process the spatially varying reflectivity of non-Lambertian surfaces and adopted a parallel multi-scale feature extractor to preserve high-resolution representation and extract depth features [62].
Shadow photogrammetry utilizes light sources and cameras to deduce the shape and contour of an object by analyzing the shadow cast on its surface [63]. It involves capturing a series of images from a consistent viewpoint of a light source with a known movement pattern. Utilize the motion of cast shadows to reconstruct scene structure [64], especially effective for topologically simple objects [65,66].
2.1.6. Multi-Sensor Fusion
Multi-source heterogeneous information fusion (MSHIF) comprehensively utilizes information obtained from different sensors, such as radar [67], lidar, camera, ultrasound, infrared thermal imager [68], GPS [69], MRI [70], IMU, and V2X, to overcome the limitations of individual sensors and create a more comprehensive perception of the environment or target, thereby enhancing the accuracy of 3D reconstruction [71]. Yu proposed a multi-modal 3D object reconstruction method based on variational autoencoders [72]. This method automatically determines the modality during training, which includes specific categories of information. It utilizes the transmission elements of the prior distribution to determine the pattern of latent variables in the latent space, enabling robust implementation of latent vector retrieval and 3D shape reconstruction.
2.2. Passive 3D Reconstruction Methods
The passive 3D reconstruction method based on vision does not interfere with the reconstructed object. It only uses optical sensors to measure the radiance reflected or emitted by the object’s surface and infers its 3D structure through the image [73].
2.2.1. Texture Mapping
For objects with obvious texture features, utilizing the texture information on the object surface [74] to map the two-dimensional image to the 3D model can significantly enhance the realism of the model’s appearance. However, this process necessitates higher texture quality [75]. Lee et al. [76] directly associated the vertices of the implicit geometry with a voxel grid having texture coordinates and applied spatially varying perspective mapping to the input image, enabling real-time texture distortion and geometry update. Xu et al. [77] utilized background noise smoothing technology within a self-supervised framework to accomplish high-fidelity texture generation in high-resolution scenarios.
2.2.2. Shape from Focus
The focusing method utilizes the camera’s focal length adjustment to calculate depth information by observing changes in the focal depth of the object. This is determined by the degree of image blur of the object at various focal lengths. Use a camera to capture images of the same scene at various focal lengths. In the image, the farther the object is from the focal plane, the blurrier its image will become. Depth estimation is another important aspect to consider. By utilizing the relationship between image blur level and depth, it is possible to estimate the object. The depth value of each part, and finally, the 3D reconstruction, convert the depth information into 3D coordinates, thereby obtaining the 3D reconstruction model of the object [78,79,80,81,82]. Yan et al. [83] used the multi-directional modified Laplacian operator to map the depth maps corresponding to different focal points and employed an iterative edge repair method to refine the reconstruction results. The focus method has better effects on objects with rich textures and does not require the use of multiple cameras or perspectives. However, it is more sensitive to lighting conditions. The texture method is often used for close-range shooting and is useful when dealing with low-texture or transparent objects.
2.2.3. Binocular Stereo Vision
The stereo vision method utilizes binocular cameras to capture different viewing angles of the scene or object to be measured. It calculates the object’s depth by analyzing the parallax of matching feature points in the images. The process is shown in Figure 3. The parallax of the binocular camera corresponds one-to-one to depth. As the depth value increases, the parallax value decreases. In other words, for the same parallax range, the corresponding depth range is larger. Binocular vision is low-cost and suitable for short-range measurements, but it has high texture requirements. It is very important in fields such as robotics as it can extract information about the relative positions of 3D objects near autonomous systems.
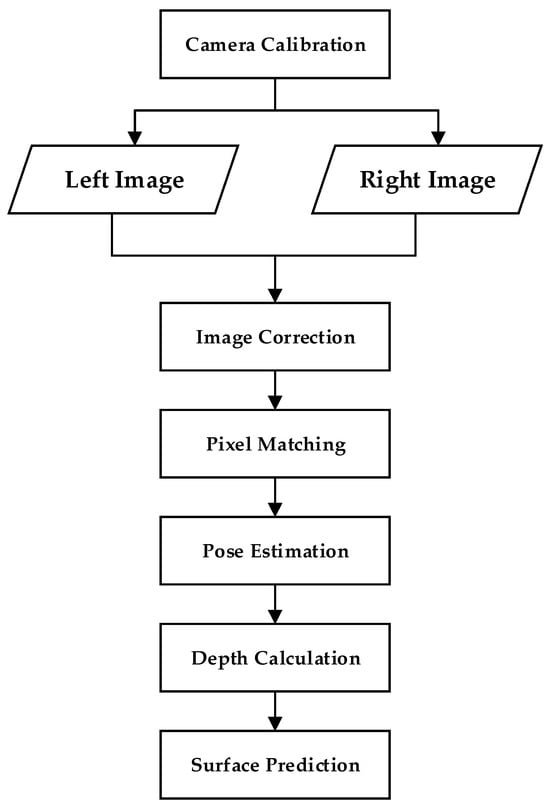
Figure 3.
3D reconstruction process based on binocular vision.
In 1960, Bela Julesz invented the random dot stereogram [84]. Consumer-grade RGB-D cameras are being used more frequently because of their affordability and portability. Izadi et al. [9] first proposed the Truncated Signed Distance Function (TSDF) model representation in KinectFusion, which simplifies model updating and enables real-time dense reconstruction using consumer-level binocular cameras. TSDF is a function that can describe the distance of a point from the surface of an object. A threshold for the distance of the 3D reconstruction is set, based on the SDF, and normalized to limit or “truncate” the distance beyond the threshold. By using distance fields, the representation of 3D shapes can be simplified, reducing the amount of data that needs to be stored.
In the binocular stereo vision system, epipolar geometry [85] describes a plane cluster with the binocular image baseline as the rotation axis. The object position P on a certain epipolar plane in this plane cluster is related to the optical centers of the left and right cameras of the binoculars. The geometric relationship that exists when c0 and c1 are coplanar is shown in Figure 4. In the binocular stereo vision system, the connection between the optical centers of the left and right cameras is the baseline B. B serves as the rotation axis of the epipolar geometric plane cluster. In the binocular stereo vision system, the connection between the optical centers c0 and c1 of the left and right cameras is the baseline B. The intersection lines of the epipolar plane and the image planes of the left and right binocular cameras are the left epipolar line l0 and the right epipolar line l1, respectively. The intersection points of the left and right epipolar lines with the baseline are the left pole points, respectively. e0 is the projection of the c0 onto the left pole e1, and e1 is the projection of c1 onto the right pole. The right epipolar line l1 and the imaging point x1 of the measured object on the right camera image plane are situated on the epipolar plane and the right camera image plane. Therefore, the image point x1 lies on the epipolar line l1. Thus, for the observed object P on the left camera, the matching point with the same name corresponding to the projection point x0 on the right image is constrained to l1, effectively reducing the search range for the corresponding point.
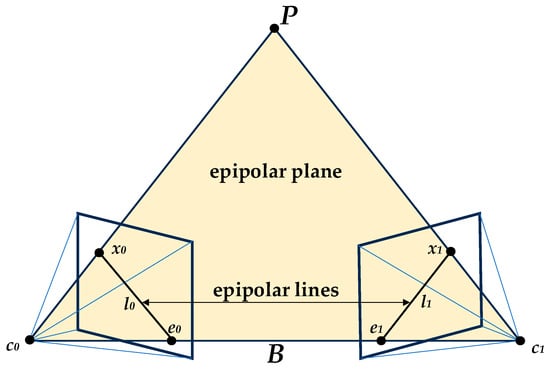
Figure 4.
Epipolar geometric relations. It is acknowledged that the mapping point x0 in the left picture is on the epipolar line l0; then, the mapping point x1 in the right picture must be on the epipolar line l1.
Whelan et al. integrated loop detection and loop optimization, utilized a deformation graph for non-rigid body transformation in real-time 3D rigid body reconstruction, and updated the coordinates of points based on the results of loop closure to align the two reconstructions [86], employing the surface element expression method [87]. Choi et al. combined numerous “model-to-model” local closed loops and larger-scale global closed loops to guarantee the global consistency of the reconstruction results. They divided the input RGB-D video stream into several scene segments as a group of frames and combined the geometric registration of the scene segments with global optimization [88]. Xin et al. [89] transferred the texture from the polarized surface to the fusion depth, utilized the depth map from the binocular camera to enhance the accuracy of the fusion depth, and applied the multiplier alternating direction method to optimize the reconstruction accuracy. In [90], the authors transferred the texture from the polarization surface to the fusion depth, used the depth map of the binocular camera to improve the accuracy of the fusion depth, and used the multiplier alternating direction method to optimize the reconstruction accuracy. Wang et al. [91] utilized calibration rods for calibration calculations based on epipolar correction and then used a weighted least squares filter to denoise and smooth the depth map, enabling the stable and accurate reconstruction of 3D point clouds in large scenes. Binocular cameras currently available on the market include ZED from Stereolabs in Paris, France, Kinect by Microsoft in Redmond, WA, USA, CamCube 3.0 by PMD in Siegen, Germany, Swiss Ranger 4000 by Mesa in Zurich, Switzerland, Bumblebee2Leap Motion by Point Gray in Vancouver, BC, Canada, Stereo IR 170 by Ultraleap in Bristol, UK, OAK camera by Luxonis Company in Mansfield, TX, USA, RealSense (D455) by Intel Corporation in Santa Clara, CA, USA, DUO by DUO3D Company in Henderson, NV, USA, etc.
2.2.4. Structure from Motion (SFM)
In 1979, Ullman and Shimon proposed inferring the 3D structure and motion of objects through the two-dimensional transformation of the projected image [92]. In 1981, Longuet-Higgins and Tomasi proposed a method for recovering 3D structures from multiple images. This method is based on the relationship between camera motion and scene structure, utilizing the movement of the camera at different times or locations. Motion, which involves restoring the 3D structure of a scene through image sequences, is a crucial milestone in vision-based 3D reconstruction. SFM is mainly divided into four groups: incremental SFM [93], global SFM [94], hybrid SFM [95], and hierarchical SFM [96].
Judging from the input and output of the data stream, the SFM method takes a set of partially overlapping photos of the same object captured from various perspectives as input. The output includes the 3D reconstruction of the object and the internal and external parameters of the camera acquired during the reconstruction process. There are two main types of SFM: the factorization method and the multi-view geometry method.
- (1)
- Factorization methods are mathematical models based on factorization, which obtain 3D structural information by decomposing image matrices [97]. Extract feature points from images captured at various viewing angles and then match them. These feature points can be corner points, edge points, and other points that have corresponding relationships in different viewing angles. The process involves converting the matched feature points into an observation matrix, which contains multiple feature point coordinates under each viewing angle. The next step is to factorize the observation matrix to decompose the factor matrix containing the 3D structure and camera motion information. Subsequently, the 3D structure information of the scene is extracted from the factor matrix, which includes the spatial coordinates of each feature point and the camera motion information, such as rotation and translation parameters, used to optimize the reconstruction results. Nonlinear optimization methods are typically utilized to enhance the accuracy of reconstruction. The advantage of the factorization method is that it can estimate the 3D structure and camera motion simultaneously without prior knowledge of the camera’s internal parameters. However, it is sensitive to noise and outliers, necessitating the use of suitable optimization methods to enhance robustness. Paul et al. [98] assumed that points are located on the object surface as a geometric prior to construct 3D point reconstruction and used affine and perspective cameras to estimate these quadratic surfaces and recover the 3D space in a closed form. Cin et al. [99] estimated the fundamental matrix by conducting motion segmentation on unstructured images to encode rigid motion in the scene. The depth map is used to resolve scale ambiguity, and the multi-body plane scanning algorithm is employed to integrate the multi-view depth and camera pose estimation network for generating the depth map.
- (2)
- Multi-view 3D reconstruction is a method based on observing the same scene from multiple perspectives or cameras and reconstructing the 3D structure of the scene using image or video information [100], as illustrated in Figure 5. The MVS method has high requirements for image quality and viewing angle. It needs to address challenges such as inadequate viewing angle overlap and shadows. At the same time, the accuracy of the image matching algorithm also greatly impacts the reconstruction effect. The primary objective of image registration is to address variations in viewing angles and postures in scale and time, ensuring consistent geometric information. This, in turn, enhances the reliability and accuracy of the subsequent 3D reconstruction process. This method has high requirements for camera calibration.
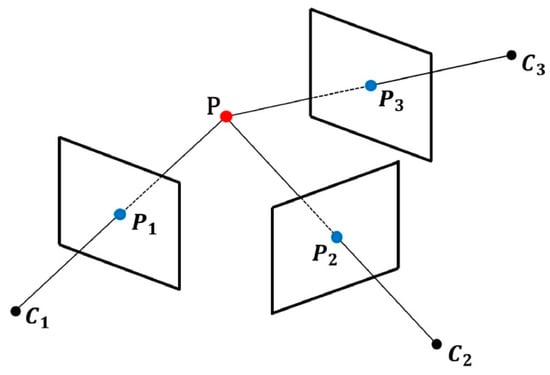 Figure 5. Multi-view geometric position.
Figure 5. Multi-view geometric position.
Moulon et al. proposed a global fusion relative motion method [101] to achieve robust, accurate, and scalable 3D structure reconstruction. They used a camera pose estimation method based on SIFT features to calculate the relative motion between multiple perspectives. Motion relationships: Through a global optimization algorithm, this relative motion information is fused to achieve more accurate, robust, and scalable 3D structure reconstruction. Plan3d [102] efficiently handles occlusion within a restricted range by maximizing information from sparsely sampled viewpoints and hierarchically representing volumes. Zhu et al. [103] performed feature matching between synthetic images and ground images by employing descriptor search and geometrically constrained outlier removal, used synthetic depth and normal images to formulate oriented 3D patches, and combined the corresponding patches through patch-based matching. Relationships propagate to the bird’s-eye view.
The multi-view stereo vision algorithm first establishes correspondences between multiple views through feature point matching. It then utilizes basic matrix estimation techniques to calculate the relative posture between each view, followed by triangulation technology to merge the two-dimensional images from multiple views. The image coordinates are converted into a 3D point cloud. Finally, a dense depth map is obtained through a dense matching algorithm to ensure consistency in pixel brightness, adjacent pixel depth, and view visibility [104,105,106,107,108].
2.3. Introduction to 3D Reconstruction Technology
2.3.1. Camera Calibration
Camera parameters are represented by a projection matrix, known as the camera matrix. The external parameters define the camera pose (position and orientation), while the internal parameters specify the camera image format (focal length, pixel size, and image origin). This process is often referred to as geometric camera calibration or simply camera calibration. Classic camera calibration requires specific features in the scene for locating and measuring, such as checkerboards or landmarks, while automatic camera calibration does not require them. They may leverage other means, such as automatically calibrating the camera by leveraging sensor data within the camera or by analyzing the geometry and structure of the image. There are many different approaches to calculate the intrinsic and extrinsic parameters for a specific camera setup. The most common methods include the Direct Linear Transformation (DLT) method, Zhang’s method [109], Tsai’s method [110], Calibration pole [111], and Selby’s method (specifically for X-ray cameras) [112]. Compared to traditional camera calibration methods, automatic calibration does not require any special calibration objects in the scene. In the visual effects industry, automatic camera calibration is often a component of the “match move” process. This process deals with synthetic camera trajectories and intrinsic projection models to re-project synthetic content into video [113].
2.3.2. Image Local Feature Point Detection
Feature detection involves methods for computing abstractions of image information and making local decisions at each image point to determine whether a specific type of image feature is present at that point [114,115,116,117,118,119]. Features are subsets of the image domain, often considered in the form of points, continuous curves, or connected areas.
The method of blob detection (BLOB) mainly includes the methods of using the Laplacian of Gaussian operator [120], and the method employing the pixel Hessian matrix [121] (second-order differential) and its determinant value [122].
In 2004, Lowe proposed an efficient method, known as Scale-Invariant Feature Transform (SIFT) [123], which utilizes the convolution of the original image and a Gaussian kernel to establish the scale space. It extracts scale-invariant features on the Gaussian difference space pyramid. This algorithm exhibits affine invariance, perspective invariance, rotation invariance, and illumination invariance, making it the most widely used for enhancing image features.
The Speeded-up Robust Features (SURF) method is an enhancement of SIFT and enables quicker feature extraction through the utilization of integral images and rapid Hessian matrix detection. SURF also exhibits scale invariance and rotation invariance [124].
Corner point detection. Corner detection includes the Harris algorithm [125,126] and the FAST algorithm [127]. The Harris corner detector identifies corners by calculating the grayscale change in the local area of each pixel in the image. It utilizes the first-order and second-order derivative information of the grayscale image to identify corner points by computing a specific matrix. FAST is a high-speed corner detector that defines a circular area around a pixel and detects whether there are enough pixels that are brighter or darker than the central pixel to determine if it is a corner point.
Binary string feature descriptor. The BRIEF algorithm selects multiple pixel point pairs in the vicinity of the feature point, compares the gray values of these point pairs, and aggregates the comparison results into a binary string to represent the feature point. Finally, the Hamming distance is used to calculate whether the feature descriptors match [128]. The BRISK algorithm does not use FAST feature point detection in the feature point detection part but uses the more stable AGAST algorithm. In the construction of the feature descriptor, the BRISK algorithm uses simple pixel gray value comparison to obtain a cascade binary bit string to describe each feature point. BRISK adopts the neighborhood sampling mode, taking the feature point as the center of the circle, constructing multiple discretized Bresenham concentric circles with different radii, and then obtaining the same spacing on each concentric circle N sampling point [129]. The ORB algorithm uses FAST to detect feature points and then uses BRIEF to describe the feature points. It introduces a directional calculation method based on BRIEF and utilizes a greedy search algorithm to select point pairs, focusing on highly differentiated ones. Point pairs are used to represent binary strings [130]. Fast Retina Keypoint (FREAK) is a descriptor method that emphasizes speed and computational efficiency [131]. It generates efficient binary string descriptors by extracting features from the Retina model around key points and utilizing a rapid feature generation method.
2.3.3. Image Segmentation
Image segmentation plays an important role in 3D reconstruction. It can help segment objects or scenes in the image into different areas, providing more accurate and meaningful information for subsequent 3D reconstruction. Image segmentation plays an important role in 3D reconstruction. Applications include object segmentation [132,133], background removal [134,135], contour extraction [136,137,138,139], semantic segmentation [140,141,142], dynamic scene segmentation [143,144,145,146,147], etc. Through effective image segmentation, the accuracy and stability of 3D reconstruction can be improved, providing a 3D model with more semantic information.
Edge-based methods, such as Canny edge detection and the Sobel operator, are utilized to detect object edges in images [148]. The region growing method is employed for segmenting images, point clouds, or voxel data. It does not require pre-specifying the number of segmentations and can handle areas of various shapes and sizes. Segments are formed by merging adjacent pixels with similar attributes. The optical flow method utilizes optical flow information between adjacent frames in the image sequence to achieve segmentation of dynamic objects [149,150]. The K-means algorithm is an iterative technique that divides the dataset into K clusters and assigns similar pixels to the same cluster to achieve image segmentation [151]. Deep Convolutional Neural Networks (DCNNs) are primarily utilized for pixel-level segmentation tasks in image segmentation [152,153]. Semantic segmentation networks are utilized to semantically annotate pixels in images, providing segmentation results with richer semantic information, including DeepLab [154] and PSPNet [155], among others. Instance segmentation networks like Mask R-CNN [156] are used to segment distinct instances in an image, particularly effective for scenes with multiple targets. Attention mechanisms have been introduced in image segmentation, such as Non-local Neural Networks (NLNet) [157], to enhance focus on crucial areas within the image. On April 5, 2023, Meta launched the Segment Anything semantic segmentation model [158]. The model’s generalization ability is considered a groundbreaking advancement in the field of computer vision (CV). It essentially addresses the generalization issue in deep learning for computer vision. Its pre-training model is suitable for various subjects. Scenes, objects, etc., that have not been trained have good segmentation capabilities.
Image segmentation algorithms can be selected based on specific scenarios and requirements. Traditional methods still perform well in some scenarios, while deep learning methods can typically deliver more accurate segmentation results when trained on large-scale datasets. Choose the appropriate one. The algorithm typically depends on the specific requirements of the application, computing resources, and data availability.
2.3.4. Rendering
In 3D reconstruction, rendering is the process of projecting a 3D model onto a 2D image or display screen. It also serves the function of visualizing implicit surfaces. The rendering method plays a key role in 3D reconstruction and affects the final result of the reconstruction. The following are some common rendering methods used in 3D reconstruction:
- (1)
- Rasterization rendering is a pixel-based rendering method that fragments the triangles of the 3D model into two-dimensional pixels and then colors each pixel, such as scanline rendering [159]. It has good real-time performance, but it struggles with handling transparency and reflection. It may not be as accurate as other methods when dealing with complex effects.
- (2)
- Ray tracing rendering is a method of simulating the propagation of light in a scene. It calculates the lighting and shadows in the scene by tracing the path of the light and considering the interaction between the light and the object. It takes into account the reflection, refraction, shadows, etc., of the light [160]. Ray tracing produces high-quality images but is computationally expensive. Monte Carlo rendering estimates the rendering equation through random sampling [161] and uses Monte Carlo integration to simulate real lighting effects [162]. In order to improve rendering efficiency, Monte Carlo rendering uses Importance Sampling to select the direction of the light path.
- (3)
- The radiometric algorithm is used to simulate the global illumination effect in the scene [163]. It considers the mutual radiation between objects and achieves realistic lighting effects by iteratively calculating the radiometric value of the surface.
- (4)
- Shadow rendering is a technology that generates shadows in real time. It renders the scene from the perspective of the light source, stores the depth information in the shadow map, and then uses the shadow map in regular rendering to determine whether the object is in shadow, simulating the interaction between light and objects. The occlusion relationship between them is used to produce realistic shadow effects [164]. Shadow rendering is divided into hard shadows and soft shadows. In the former, there are obvious shadow boundaries between objects, while in the latter, the shadow boundaries are gradually blurred, producing a more natural effect.
- (5)
- Ambient occlusion is a local lighting effect that considers the occlusion relationship between objects in the scene. It enhances shadows in deep recesses on the surface of objects, thereby enhancing the realism of the image [165].
- (6)
- The non-photorealistic rendering (NPR) method aims to imitate painting styles and produce non-realistic images, such as cartoon style and brush effects [166].
- (7)
- Volume rendering is a rendering technology used for visualizing volume data. It represents volume data as 3D textures and utilizes methods such as ray tracing to visualize the structure and features within the volume. The direct volume renderer [167] maps each sample value to opacity and color. The volume ray casting technique can be derived directly from the rendering equation. Volume ray casting is classified as an image-based volume rendering technique because the calculations are based on the output image rather than input volumetric data as in object-based techniques. The shear distortion method of volume rendering was developed by Cameron and Undrill and popularized by Philippe Lacroute and Marc Levoy [168]. Texture-based volume rendering utilizes texture mapping to apply images or textures to geometric objects.
- (8)
- The splash operation blurs or diffuses the point cloud data into the surrounding area, transferring the color and intensity information of the points during the splashing process. This can be achieved by transferring the attributes of the point (such as color, normal vector, etc.) to the surrounding area using a specific weighting method. In adjacent splash areas, there may be overlapping parts where color and intensity superposition operations are performed to obtain the final rendering result [169].
The technology utilizes prior knowledge or models to improve the 3D reconstruction effect. These prior pieces of information can include the shape of the object, surface material, motion model, etc. [170]. By incorporating this information, the system can become more robust in handling challenges like noise and occlusion, enhancing accuracy and resilience to specific scenes or objects. Motion capture focuses on capturing and analyzing the movement of objects to provide precise data for 3D reconstruction and enhance the accuracy of the process.
3. Dynamic 3D Reconstruction Methods
Dynamic 3D reconstruction aims to capture and present the 3D structure of objects and environments, as well as their changes in dynamic scenes. It involves effectively handling dynamic factors such as moving objects, lighting changes, and scene evolution to create accurate and up-to-date images that reflect the current state of the scene. The essence of dynamic 3D reconstruction lies in capturing and modeling the 3D structure of an object or scene as it experiences dynamic changes, such as object movement, variations in lighting conditions, or environmental changes. Dynamic 3D reconstruction methods are typically based on techniques like feature point matching and motion estimation. Feature point matching is used to track key feature points in the scene, while motion estimation is used to estimate camera motion between adjacent frames.
3.1. Introduction to Multi-View Dynamic 3D Reconstruction
Multi-view dynamic 3D reconstruction involves utilizing multiple cameras or video cameras to observe the same scene from various perspectives and integrating temporal information to reconstruct the 3D structure of the dynamic scene. Observe the same scene from various angles, ensuring that all cameras can capture images simultaneously. Make sure that images taken by different cameras have consistent timestamps and that the matching and reconstruction results between adjacent frames are coherent. For each frame of an image, computer vision technology is used to extract feature points or feature descriptors in the image. By matching these feature points, the correspondence between different images is established. This process combines the pose information of the camera and the structural information of the scene. Simultaneously, scene modeling and camera positioning are carried out [171]. Dynamic scenes are processed through motion estimation, motion removal, and other technologies. The obtained 3D point cloud or model is then optimized and post-processed to enhance accuracy, remove noise, etc. [172,173].
Dynamic 3D reconstruction is primarily used for estimating the posture of the human body. By analyzing the captured data, the posture information of the human body at each time point is determined, including joint angles, body proportions, etc. Compared to general flexible body movements, human body movements have stronger priors. The shape of the human body conforms to a fixed geometric distribution. The SMPL/X model [174] or expanded versions of hands, faces, and other body parts are commonly utilized in academic circles [175] to describe the geometry of the human body using these parametric models. To achieve dense 3D reconstruction of multi-camera dynamic scenes, Matsuyama et al. proposed a parallel pipeline processing method [176] for reconstructing dynamic 3D object shapes from multi-view video images. Through this method, the time series of the full 3D voxel representation of the object’s behavior can be obtained in real-time, and the 3D object can be generated.
3.2. Dynamic 3D Reconstruction Based on RGB-D Camera
In dynamic 3D reconstruction based on RGB-D cameras, depth information and color image data are input. Advanced computer vision algorithms and technologies are utilized to process data gathered by sensors to fulfill requirements such as real-time performance, reconstruction accuracy, and perception of dynamic objects. Dynamic 3D reconstruction algorithms based on binocular cameras generally involve processes such as identifying and tracking objects, estimating camera poses, calculating depth information, and creating 3D models in real time.
In 2016, Newcombe et al. proposed a real-time dynamic 3D reconstruction and tracking method for non-rigid scenes. DynamicFusion [177], a reconstruction algorithm that is not reliant on any template prior information, can be considered the pioneer of real-time dynamic reconstruction. The DynamicFusion system reconstructs the geometry of the scene while also estimating the 6D deformation domain of the dense volume representation, warping the estimated geometry into real-time frames. As more measurements are combined, a progressively denoised, detail-preserving, and more complete image is obtained. This method is suitable for a wide range of moving objects and scenes. However, DynamicFusion does not utilize any prior information, making the algorithm less robust to significant movements between frames and motions in occluded areas. It is more adept at handling closed topology. Surface reconstruction, especially the reconstruction of topological changes, is poor. Innmann proposed the Volume Deform algorithm [178], which combines global sparse color features (such as SIFT operators) and dense depth maps to enhance the robustness of finding accurate feature matching points, thereby significantly reducing the cumulative error of the reconstruction model. The shortcoming of this algorithm is the drift phenomenon. Although matching the global SIFT feature operator enhances the system’s robustness and reduces alignment errors, the drift phenomenon cannot be completely eliminated. Moreover, due to the regularization term setting, reconstructions of highly curved objects may appear smoother and less curved during motion.
Double Fusion [179], proposed by Yu et al., fully integrates the digitally driven template (SMPL model) with real-time reconstructed dense geometry, non-rigid motion, and inner human body shape. It introduces a double-layer surface representation: the inner layer, which is the parameterized model surface (inner body), and the outer surface obtained through deep fusion. Joint motion tracking based on a double-layer surface representation is proposed to ensure the robustness of the entire system, even during rapid motion. The shortcoming of the system is that when the user wears relatively thick clothing, the estimated human body also appears larger. Additionally, it cannot accurately distinguish between the outer surface and the interactions between people and objects.
Fusion4D [180] was proposed by Dou et al. The method is based on a multi-view scheme and does not rely on any prior information, allowing for the reconstruction of any scene or object in theory. As shown in the video, in addition to dynamically reconstructing the human body, it can also dynamically reconstruct dogs. An important contribution of this algorithm is the introduction of key volume, making it highly robust to large inter-frame motions and changes in mesh topology. Additionally, Fusion4D also incorporates voxel collision detection to ensure the correct TSDF model. The disadvantage of this system is that when the frame rate of the RGBD input stream is too low or the inter-frame motion is too large, the corresponding matching point estimation between frames will be inaccurate, leading to the failure of the non-rigid alignment process to converge.
Lin et al. proposed OcclusionFusion [181], which infers the motion of the occlusion area through Long Short-Term Memory (LSTM) and Graph Neural Network to calculate the confidence of the motion. This is achieved by modeling the network output using a probabilistic model confidence, thereby reducing implausible motion, enhances robust tracking, and ultimately improves reconstruction results. As a result, this method leads to improved results. Pan et al. [182] used an optimized epipolar geometric model and Mask R-CNN to jointly segment the image. They employed kernel principal component analysis to reduce point cloud noise and then applied an octree-based dynamic filtering method to eliminate outliers, ultimately achieving high-precision 3D reconstruction.
3.3. 3D Gaussian Splatting (3DGS)
Kerbl et al. proposed 3DGS, which utilizes 3D Gaussian functions to represent the scene. This method retains the characteristics of a continuous volume radiation field and introduces 3D Gaussian interleaving optimization, density control, and a fast visibility-aware rendering algorithm that supports anisotropic splattering. It ensures a real-time display rate while enhancing visual quality [183]. 3DGS maps point cloud data to the image plane and utilizes Gaussian functions to produce realistic images. Colors at different angles are represented using spherical harmonics to simulate the effect of viewing the scene from a different perspective. Spherical harmonics can attenuate high frequencies to a certain extent. Information is essentially a form of lossy compression that can convert discrete information into continuous information for computation [184]. The process of 3DGS is shown in Figure 6.
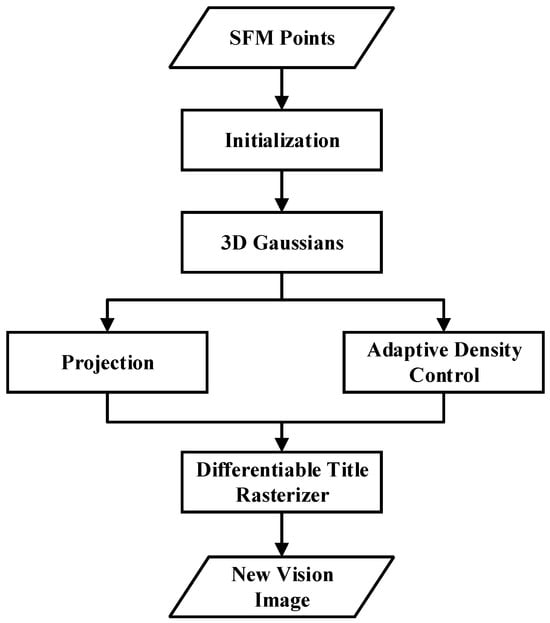
Figure 6.
3D Gaussian Splatting system process.
Antoine et al. [185] utilized Poisson reconstruction to extract meshes from Gaussian distributions, flatten the Gaussian sphere, bind Gaussian functions to the mesh surface, and jointly optimize these Gaussian functions and meshes through Gaussian splash rendering Physically based Newtonian dynamics can be seamlessly integrated into 3D Gaussian to achieve high-quality novel motion synthesis [185,186,187,188]. Chung et al. introduced a deep regularization method to avoid overfitting in few-shot image synthesis [189]. Geometric constraints are introduced by utilizing sparse and dense depth maps obtained from COLMAP and monocular depth estimation models, respectively. In order to prevent overfitting, this method incorporates unsupervised constraints on geometric smoothness and utilizes Canny edge detector to avoid regularization of edge regions with significant depth changes. The 4D Gaussian distribution incorporates a temporal component to model complex motion while maintaining efficiency [190,191]. Lin et al. proposed a progressive partitioning strategy called VastGaussian [192] based on 3D Gaussian distribution. This method divides a large scene into multiple units, optimizes these units in parallel, and then merges them into a complete scene. At the same time, decoupled appearance modeling is introduced into the optimization process to minimize appearance changes in rendered images, enabling high-quality reconstruction and real-time rendering of large scenes. Jiang et al. [193] combined the adaptive canonical point upsampling strategy and adaptive deformation to propose 3D Point Splatting Hand Reconstruction (3D-PSHR) to achieve real-time dynamic reconstruction of the pose-free hand. 3D-PSHR separates the appearance color into texture modeling with intrinsic albedo and pose-aware shading based on normal deformation. Chen et al. [194] introduced a unified representation model called Periodic Vibrating Gaussian (PVG). PVG extends the 3D Gaussian splatter paradigm to solve the problem of modeling large-scale scenes with complex geometries and unconstrained dynamics without relying on manually labeled object bounding boxes or expensive optical flow estimation. Gao et al. [195] combined grid representation with 3D Gaussian. By adopting Gaussian representation, not only the vertex positions but also the deformation gradients were used to guide the 3DGS. By utilizing the grid deformation method, this approach ensures real-time rendering and effectively maintains a high-quality appearance even when subjected to significant deformations.
Currently a very hot technology, 3DGS has revolutionary significance, redefining the boundaries of scene representation and rendering. It is expected to have a significant impact on the future progress of 3D reconstruction and representation.
3.4. Simultaneous Localization and Mapping (SLAM)
SLAM is primarily utilized to construct or update maps of unfamiliar environments while simultaneously tracking the location of targets within them. SLAM always utilizes multiple types of sensors, and various sensor types will result in different SLAM algorithms [196]. The SLAM algorithm utilizes visual and inertial sensors for data fusion to enhance the accuracy of attitude and motion estimation in dynamic scenes. Inertial information provides an important supplement to understanding the movement of objects that cannot be observed over a short period [197,198,199]. SLAM is primarily utilized to describe the mapping process employed when navigating in an unfamiliar environment. The SLAM system can run in real time (online SLAM) or process the collected data afterward (offline SLAM). In a dynamic environment, the system needs to process revisiting previous positions. Loop closure detection is a critical step in identifying and correcting errors that may accumulate during the mapping process. It involves using each new estimate to create an updated map during an iterative process [200,201,202]. Yan et al. [203] proposed GS-SLAM to integrate a 3D Gaussian representation into the SLAM system. GS-SLAM utilizes a real-time differentiable splatting rendering pipeline to greatly improve map optimization and RGB-D re-rendering speeds. GS-SLAM introduces an extended 3D Gaussian adaptive strategy designed to efficiently reconstruct newly observed scene geometries. Matsuki et al. [204] introduced a real-time SLAM system that utilized 3D-GS for incremental 3D reconstruction and introduced geometric verification and regularization to address ambiguities in incremental 3D dense reconstruction. This method is applicable to mobile single-lens cameras and RGB-D cameras.
Compared to static 3D scene reconstruction, dynamic 3D reconstruction involves changes in scene form such as moving objects, changing lighting, and evolving structures. These changes necessitate the use of various technologies in the field, including comprehensive motion estimation, recognition, and analysis. In the context of the Metaverse and General Artificial Intelligence (AGI), the increasing demand for real-time, high-precision, and intricate 3D scene reconstruction in complex environments is revealing a gap between current dynamic 3D reconstruction technology and application requirements.
4. 3D Reconstruction Methods Based on Machine Learning
4.1. Statistical Learning Methods
Statistical learning: Statistical learning methods can be utilized in 3D reconstruction to model and learn the mapping relationship from input data (such as images and point clouds) to 3D structures, learn scene and object shapes from large-scale data, and predict the 3D shape of objects through training models. This process enables the restoration and comprehension of 3D scenes [205,206,207].
4.2. 3D Semantic Occupancy Prediction Methods
3D semantic occupancy prediction methods utilize machine learning technology for semantic segmentation and scene understanding. This enables the improved identification and reconstruction of the geometric structure and semantic information of various objects in the scene.
Huang et al. utilized a TPV encoder (TPVFormer) [208] to efficiently extract TPV features and employed an attention mechanism to combine the image features related to each query in every TPV plane. A model trained solely with sparse point supervision can efficiently predict the semantic occupancy of all voxels. Ming et al. proposed a novel method based on a projection matrix for constructing local 3D feature volumes and global Bird’s Eye View (BEV) features. A global–local fusion module has been proposed to combine global information with local information to obtain the final 3D volume [209]. Li et al. [210] represented objects as a collection of deformable parts, enhancing the semantic consistency between the reconstructed mesh and the original image, and achieved single-view reconstruction through unsupervised learning.
4.3. Deep Learning Methods
Deep learning methods outperform most existing machine learning methods in several areas, with computer vision being a prominent one. With the advancement of deep learning technology, dynamic 3D scene reconstruction methods based on neural networks have started to capture the interest of researchers. Neural networks can discover feature information that humans may not be able to interpret, and it can extract high-dimensional features [211,212,213].
4.3.1. Depth Map
Dou et al. proposed a technology based on deep neural networks (DNNs) to reconstruct a 3D face from a single 2D image in an end-to-end manner [214]. In 2018, Yao et al. proposed an end-to-end deep learning architecture called MVSNet for inferring depth maps from multi-view images. The method involves extracting depth visual image features initially and then constructing a 3D cost volume based on the reference camera frustum through differentiable monotonic distortions. Subsequently, 3D convolution is applied to regularize and regress the initial depth map. Finally, the reference image is utilized to optimize and generate the final output [215]. After MVSNet was proposed, it achieved very good results in estimating depth maps [216]. Sun et al. utilized a multi-scale approach to predict TSDF values, aiming to achieve higher-quality reconstruction accuracy. In addition, to address the issue of traditional 3D convolution consuming significant video memory, the 3D sparse convolution method is introduced to enhance operator efficiency. This method utilizes lower memory resources in exchange for higher-quality scene reconstruction and incorporates the 3D GRU module. To replace the traditional TSDF fusion method, consider using the GRU module, which can self-learn to enhance the model’s generalizability [217].
Objects in the real world almost never exhibit Lambertian reflection characteristics [218]. In 2017, DPSN [219] was used for the first time in the method of photometric stereo for three-dimensional reconstruction in response to the nonlinear relationship caused by non-Lambertian surface reflectance. On this basis, the calibrated photometric stereo method using orthogonal cameras and directional light sources is combined with deep learning, WJ20 [220], utilizing additional information, PS-FCN [221] employing supervised methods, GR-PSN [222], CNN-PS [223], NormAttention-PSN [224], DR-PSN [225], etc. Ikehata proposed a scalable universal photometric stereo network (SDM-UniPS) [226] that can operate reliably under unknown and arbitrary lighting conditions.
4.3.2. Point Cloud
3D point cloud processing algorithms based on deep learning generally include voxel-based algorithms [227,228], view-based algorithms [229,230], and point-based algorithms [231,232]. The point-based algorithm directly uses point coordinates as input and can learn directly from the original data in an end-to-end manner, simplifying feature engineering and rule design in the traditional process. It has strong generalization ability and robustness and is suitable for scenarios of all types and sizes. Chen et al. proposed Point-BLS [233], which extracts point cloud features through a deep learning-based feature extraction network and then utilizes a comprehensive learning system for classification. Zhou et al. [234] used an instance segmentation method to extract and associate multiple key points on multi-view ISAR images and used an enhanced factorization method to derive the projection vector between the 3D geometry of the space target and the multi-view ISAR image. The 3D geometry reconstruction problem is transformed into an unconstrained optimization problem, and the 3D model is obtained using the quantum behavioral particle swarm optimization (QPSO) method.
Point cloud-based unsupervised representation learning (URL), which aims to learn robust and general feature representations from unlabeled data, has been intensively studied recently. This approach involves generating point cloud objects during training to alleviate the laborious and time-consuming challenge of data annotation [235]. Methods based on point cloud generation include point cloud self-reconstruction [236], point cloud GAN [237,238], point cloud upsampling [239], and point cloud completion [240,241], depending on the specific pre-task utilized. Methods based on point cloud context utilize context similarity for learning. Sanghi et al. [242] proposed enhancing feature representation by maximizing the mutual information between 3D objects and their local parts. Spatial context structures can also be used for learning. Poursaeed et al. [243] proposed learning the location of key points by predicting the rotation angle of 3D objects. Chen et al. [244] proposed learning the spatial context of objects by segmenting the distorted parts of the shape and correcting them.
4.3.3. Neural Radiance Field (NeRF)
Mildenhall et al. proposed a method called NeRF [245], which utilizes 5D neural radiation fields to represent complex geometry and material in continuous scenes. It is a new paradigm in the field of deep learning and computer vision, marking the transition from the conventional approach of deep learning to processing 3D data. NeRF utilizes the Multilayer Perceptron (MLP) network for parameterization and introduces a differentiable rendering method that enhances traditional voxel rendering techniques. RGB images are obtained through differentiable rendering. Each 5D coordinate is mapped to a higher-dimensional space using the position encoding method, enabling optimization of the neural radiation field to better express high-frequency details. Refer to Figure 7 for more details.
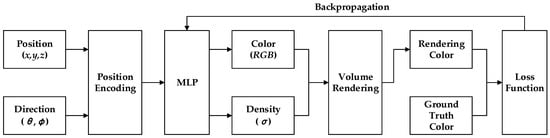
Figure 7.
An overview of NeRF scene representation and differentiable rendering procedure.
Barron et al. structurally replaced position encoding with integrated positional encoding and utilized multivariate Gaussians for approximation. By effectively rendering anti-aliased frustum cones instead of rays, the accuracy and efficiency of NeRF representation were significantly improved [246]. Wang et al. [247] introduced SDF as an implicit representation of 3D surfaces and proposed a volume rendering method based on SDF, enabling multi-view 3D reconstruction through volume rendering. The derivation of NeuS is result-oriented and directly constructs SDF. The relationship between weights and the sampling process also uses hierarchical sampling, similar to NeRF. Block-NeRF [248], proposed by Tancik et al., is used for perspective synthesis of large-scale scenes. By dividing the scene into blocks, the NeRF algorithm, which originally required a large number of calculations, is converted into calculations of small blocks, thus improving the scalability of the algorithm. Performance and operational efficiency: The Mega-NeRF [249] algorithm, proposed by Turki et al., introduces a new GPU-accelerated algorithm that can efficiently generate large-scale scenes with high-quality perspective synthesis. It offers better scalability and faster processing capabilities. Train the NeRF model, and by processing the input scene data in layers, you can effectively manage large-scale scenes and enhance the scalability and operational efficiency of the algorithm. The InstantNGP proposed by Müller is different from NeRF’s positional encoding. It uses a hash table to store features [250] and sets multiple resolutions to gather more information. This hash encoding idea can not only replace the positional encoding in NeRF but also be used for SDF network extraction, etc. NesF [251], proposed by Vora et al., provides a pre-trained NeRF model. It samples its volume density grid to obtain a 3D scene representation and converts the grid into semantics by utilizing a fully convolutional volume-to-volume network. A feature grid is used to obtain a geometrically reconstructed image. Mip-NeRF 360 [252] introduces a proposed MLP and distortion-based regularizer to achieve high-quality reconstruction. Geo-NeuS [253], proposed by Fu et al., explicitly performs multi-view geometry optimization by exploiting the sparse geometry of SFM and photometric consistency in multi-view stereo. Vinod et al. [254] trained a conditional NeRF without explicit 3D supervision by mapping input image pixels into texture space to learn 3D representations from a collection of single-view in-the-wild images of objects belonging to a specific category. Dai et al. [255] utilized scene context information and adopted a synthetic rendering formula to generate high-quality and harmonious 3D objects in existing NeRF. Li et al. [256] trained a 3D perception preprocessing network that integrates real-world degradation modeling to address the issue of information loss during image degradation and restoration by leveraging implicit multi-view guidance.
In graphics, the density of a 3D scene is an isotropic attribute. Unlike color, it has no viewing angle dependence. The output of NeRF is an image of the same scene captured from various viewing angles. Unlike explicit geometries, such as point clouds, voxels, and triangle meshes, that can be accessed by traversing all elements in the storage space, implicit geometry requires selecting spatial coordinates as input for sampling points. Neural implicit geometry involves converting the input and output through a neural network, enabling the rendering of pixel colors through weighted integration of a series of sampling points on the light source. The implicit scene will output the geometric density and color of these points [257]. By utilizing hierarchical sampling to address the issues of point waste and undersampling, NeRF can iteratively update parameters to refine the representation towards the actual value, enabling the completion of high-quality synthesis tasks from new perspectives. A NeRF neural network model can only store information about one object or scene, and NeRF is prone to overfitting for specific scenes [258,259].
In 3D reconstruction, deep learning is often combined with reinforcement learning methods [260,261,262,263]. The application of reinforcement learning in 3D reconstruction can help optimize data collection, path planning, reconstruction algorithms, and result optimization, thereby enhancing the efficiency, accuracy, and adaptability of three-dimensional reconstruction. The application of reinforcement learning, especially hierarchical reinforcement learning [264,265,266], in three-dimensional reconstruction can help robots better understand and perceive the environment [267], optimize the data collection process, improve reconstruction efficiency and quality, and adapt to different scenarios and environmental changes.
The loss function defines how to measure the difference between the current model output and the target output. The weight parameters needed for model learning are determined and adjusted by minimizing the results of the loss function. The commonly used error metrics include the mean absolute error (MAE) [268], mean square error (MSE) [269], normalized mean error (NME) [270], root mean square error (RMSE) [271], cross-entropy loss (CE) [272], adversarial loss [273], etc. Additionally, a customized loss function can be tailored to the specific requirements of tasks and models to more accurately align with the problem’s characteristics.
5. Datasets
In the study of 3D reconstruction, it is essential to consider that there may be variations in the 3D reconstruction outcomes across different scenarios. Therefore, when conducting experimental research, different datasets should be selected according to the specific research purposes. There are numerous datasets available for evaluating real-world and synthetic scene reconstruction methods. We collected and analyzed commonly used datasets for 3D reconstruction in Table 1, Table 2 and Table 3.

Table 1.
Human body datasets.
Table 2.
Indoor scene datasets.
Table 3.
Outdoor scene datasets.
Many datasets contain both indoor and outdoor scenes, such as ETH3D [302], PASCAL3D+ [301], JRDB [314], etc. The dynamic 3D scene dataset is primarily utilized to assess the rendering quality of new perspectives in 3D scene reconstruction tasks. Given a captured video, the algorithm must accurately reconstruct the scene to generate images from a different perspective or time [315], commonly used datasets include Immersive Video [316], Neural 3D Video [317], Nerfies [318], Dynamic Replica [319], Bonn RGB-D Dynamic [320], etc.
6. Outlook and Challenges
6.1. Outlook
In indoor scenes, modeling the entire scene using a small number of color pictures remains the prevailing trend for the future. This is due to the limited availability of pictures in many indoor scenes, which restricts the opportunity to use a large number of images for training purposes. In outdoor scenes, it is also necessary to use multiple images for synthesis and training. At the same time, information from multiple perception modalities, such as images, laser scanning, depth sensors, and voice, can be integrated to enhance the accuracy of 3D reconstruction.
The application of hardware accelerators, such as GPUs, can significantly improve the calculation speed of 3D reconstruction algorithms. Cloud computing platforms can offer robust computing resources for large-scale data processing, supporting real-time performance and processing of extensive data requirements. The equipment used in the field of 3D reconstruction is gradually becoming simpler. The cameras and sensors on smartphones are powerful enough to support some simple 3D reconstruction applications. The popularity of mobile devices enables users to easily conduct image-based 3D scanning and 3D reconstruction [321]. 3D reconstruction software tools enable users to perform 3D modeling without requiring an in-depth understanding of complex algorithms and principles. This accessibility allows a growing number of individuals to utilize 3D reconstruction technology across various application fields, thereby advancing the development of this field.
In February 2024, OpenAI launched a new model, Sora, designed to generate videos based on text input. In March 2024, Figure AI integrated ChatGPT as an intelligent brain, which will be an important milestone in the development of AGI. The application of 3D reconstruction in the metaverse is accompanied by the development of AR/VR products by technology companies such as Apple, Meta, Google, and Sony. Some examples include Apple Vision Pro, Meta Quest 3, Microsoft HoloLens 2, VIVE Pro, and PlayStation VR 2. With the advancement of these products, individuals can work in the metaverse, engage in face-to-face work from home, immerse themselves in 3D scenes, and experience movies and games in an immersive manner. By combining robotics with brain–computer interface technology, people can interact with machines using their bodies to complete various tasks in work and life, truly liberating human hands.
6.2. Challenges
3D reconstruction is an open research field. Although vision-based 3D reconstruction has made remarkable progress, there are still some challenges. Challenges such as managing dynamic scenes, occlusions, topology changes, and efficiently processing large-scale data still necessitate further in-depth research. The extensive data collection involved in 3D reconstruction may raise privacy and ethical issues, particularly in public places and personal areas.
The accuracy of 3D reconstruction is affected by sensor noise, changes in shooting conditions, and environmental lighting, which result in data uncertainty. Many 3D reconstruction algorithms have limited robustness to various scenes, lighting conditions, and object types, which can lead to failures or performance degradation in specific scenarios. High-quality 3D reconstruction is computationally expensive, and finding ways to efficiently create a realistic scene model using readily available equipment is currently a significant challenge. Challenges are not only problems but also the source of innovation. By overcoming these challenges, 3D reconstruction will better serve the development of society and technology.
7. Summary
This survey analyzes the key technologies of 3D reconstruction from the aspects of static and dynamic scenes, machine learning, etc. It introduces the active vision method and passive vision in detail and summarizes the research progress of various 3D reconstruction methods and the effects of 3D reconstruction. Different application fields have varying requirements for 3D reconstruction, and distinct 3D scenes should be reconstructed to serve specific task-oriented purposes.
With the development of science and technology, artificial intelligence will eventually reach or even surpass human intelligence in the future. With the aging of the population in the future, robots will inevitably replace humans in various tasks. Vision-based 3D reconstruction will provide accurate visual perception information and help the model better transition from the two-dimensional world to the 3D world. Continuous innovation in this field will equip computers with more advanced tools and perspectives to comprehend and utilize the 3D world. This will enable us to understand and simulate the physical world better, thus enhancing the intelligence of robots.
Author Contributions
Conceptualization, L.Z. and G.W.; methodology, L.Z.; software, L.Z.; validation, Y.Z., X.C. and H.H.; formal analysis, G.W.; investigation, L.Z.; resources, G.W.; data curation, X.C.; writing—original draft preparation, L.Z.; writing—review and editing, L.Z. and G.W.; visualization, Y.Z.; supervision, G.W. and Y.Z.; project administration, H.H.; funding acquisition, G.W. All authors have read and agreed to the published version of the manuscript.
Funding
The work has been partly supported by Key Laboratory of Modern Measurement and Control Technology Ministry of Education, Beijing Information Science and Technology University, Beijing, China.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Scopigno, R.; Cignoni, P.; Pietroni, N.; Callieri, M.; Dellepiane, M. Digital fabrication techniques for cultural heritage: A survey. Comput. Graph. Forum 2017, 36, 6–21. [Google Scholar] [CrossRef]
- Mortara, M.; Catalano, C.E.; Bellotti, F.; Fiucci, G.; Houry-Panchetti, M.; Petridis, P. Learning cultural heritage by serious games. J. Cult. Herit. 2014, 15, 318–325. [Google Scholar] [CrossRef]
- Hosseinian, S.; Arefi, H. 3D Reconstruction from Multi-View Medical X-ray images–review and evaluation of existing methods. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 319–326. [Google Scholar] [CrossRef]
- Laporte, S.; Skalli, W.; De Guise, J.A.; Lavaste, F.; Mitton, D. A biplanar reconstruction method based on 2D and 3D contours: Application to the distal femur. Comput. Methods Biomech. Biomed. Eng. 2003, 6, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Li, G.; Sha, J. The survey of medical image 3D reconstruction. In Proceedings of the SPIE 6534, Fifth International Conference on Photonics and Imaging in Biology and Medicine, Wuhan, China, 1 May 2007. [Google Scholar]
- Thrun, S. Robotic mapping: A survey. In Exploring Artificial Intelligence in the New Millennium; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2003; pp. 1–35. [Google Scholar]
- Keskin, C.; Erkan, A.; Akarun, L. Real time hand tracking and 3d gesture recognition for interactive interfaces using hmm. In Proceedings of the ICANN/ICONIPP 2003, Istanbul, Turkey, 26–29 June 2003; pp. 26–29. [Google Scholar]
- Moeslund, T.B.; Granum, E. A survey of computer vision-based human motion capture. Comput. Vis. Image Underst. 2001, 81, 231–268. [Google Scholar] [CrossRef]
- Izadi, S.; Kim, D.; Hilliges, O.; Molyneaux, D.; Newcombe, R.; Kohli, P.; Shotton, J.; Hodges, S.; Freeman, D.; Davison, A.; et al. Kinectfusion: Real-time 3d reconstruction and interaction using a moving depth camera. In Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011. [Google Scholar]
- Remondino, F.; Nocerino, E.; Toschi, I.; Menna, F. A critical review of automated photogrammetric processing of large datasets. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 591–599. [Google Scholar] [CrossRef]
- Roberts, L.G. Machine Perception of 3D Solids. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1963. [Google Scholar]
- Marr, D.; Nishihara, H.K. Representation and recognition of the spatial organization of 3D shapes. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1978, 200, 269–294. [Google Scholar]
- Grimson, W.E.L. A computer implementation of a theory of human stereo vision. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1981, 292, 217–253. [Google Scholar] [PubMed]
- Zlatanova, S.; Painsil, J.; Tempfli, K. 3D object reconstruction from aerial stereo images. In Proceedings of the 6th International Conference in Central Europe on Computer Graphics and Visualization’98, Plzen, Czech Republic, 9–13 February 1998; Volume III, pp. 472–478. [Google Scholar]
- Niemeyer, M.; Mescheder, L.; Oechsle, M.; Geiger, A. A Differentiable volumetric rendering: Learning implicit 3d representations without 3d supervision. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 3504–3515. [Google Scholar]
- Varady, T.; Martin, R.R.; Cox, J. Reverse engineering of geometric models—An introduction. Comput.-Aided Des. 1997, 29, 255–268. [Google Scholar] [CrossRef]
- Williams, C.G.; Edwards, M.A.; Colley, A.L.; Macpherson, J.V.; Unwin, P.R. Scanning micropipet contact method for high-resolution imaging of electrode surface redox activity. Anal. Chem. 2009, 81, 2486–2495. [Google Scholar] [CrossRef] [PubMed]
- Zheng, T.X.; Huang, S.; Li, Y.F.; Feng, M.C. Key techniques for vision based 3D reconstruction: A review. Acta Autom. Sin. 2020, 46, 631–652. [Google Scholar]
- Isgro, F.; Odone, F.; Verri, A. An open system for 3D data acquisition from multiple sensors. In Proceedings of the Seventh International Workshop on Computer Architecture for Machine Perception (CAMP’05), Palermo, Italy, 4–6 July 2005. [Google Scholar]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Göbel, W.; Kampa, B.M.; Helmchen, F. Imaging cellular network dynamics in three dimensions using fast 3D laser scanning. Nat. Methods 2007, 4, 73–79. [Google Scholar] [CrossRef] [PubMed]
- Flisch, A.; Wirth, J.; Zanini, R.; Breitenstein, M.; Rudin, A.; Wendt, F.; Mnich, F.; Golz, R. Industrial computed tomography in reverse engineering applications. DGZfP-Proc. BB 1999, 4, 45–53. [Google Scholar]
- Rocchini, C.M.P.P.C.; Cignoni, P.; Montani, C.; Pingi, P.; Scopigno, R. A low cost 3D scanner based on structured light. In Computer Graphics Forum; Blackwell Publishers Ltd.: Oxford, UK; Boston, MA, USA, 2001; Volume 20. [Google Scholar]
- Park, J.; Kim, H.; Tai, Y.W.; Brown, M.S.; Kweon, I. High quality depth map upsampling for 3D-TOF cameras. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Al-Najdawi, N.; Bez, H.E.; Singhai, J.; Edirisinghe, E.A. A survey of cast shadow detection algorithms. Pattern Recognit. Lett. 2012, 33, 752–764. [Google Scholar] [CrossRef]
- Schwarz, B. Mapping the world in 3D. Nat. Photonics 2010, 4, 429–430. [Google Scholar] [CrossRef]
- Arayici, Y. An approach for real world data modeling with the 3D terrestrial laser scanner for built environment. Autom. Constr. 2007, 16, 816–829. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Yang, Y.; Shi, R.; Yu, X. Laser scanning triangulation for large profile measurement. J.-Xian Jiaotong Univ. 1999, 33, 15–18. [Google Scholar]
- França, J.G.D.; Gazziro, M.A.; Ide, A.N.; Saito, J.H. A 3D scanning system based on laser triangulation and variable field of view. In Proceedings of the IEEE International Conference on Image Processing 2005, Genova, Italy, 11–14 September 2005; Volume 1. [Google Scholar]
- Boehler, W.; Vicent, M.B.; Marbs, A. Investigating laser scanner accuracy. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34 Pt 5, 696–701. [Google Scholar]
- Voisin, S.; Foufou, S.; Truchetet, F.; Page, D.; Abidi, M. Study of ambient light influence for 3D scanners based on structured light. Opt. Eng. 2007, 46, 030502. [Google Scholar] [CrossRef]
- Tachella, J.; Altmann, Y.; Mellado, N.; McCarthy, A.; Tobin, R.; Buller, G.S.; Tourneret, J.Y.; McLaughlin, S. Real-time 3D reconstruction from single-photon lidar data using plug-and-play point cloud denoisers. Nat. Commun. 2019, 10, 4984. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Sui, C.; Huang, T.; Zhang, Y.; Zhou, W.; Chen, X.; Liu, Y.H. 3D surface reconstruction of transparent objects using laser scanning with a four-layers refinement process. Opt. Express 2022, 30, 8571–8591. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Xu, D.; Hyyppä, J.; Liang, Y. A survey of applications with combined BIM and 3D laser scanning in the life cycle of buildings. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5627–5637. [Google Scholar] [CrossRef]
- Dong, J.; Li, Z.; Liu, X.; Zhong, W.; Wang, G.; Liu, Q.; Song, X. High-speed real 3D scene acquisition and 3D holographic reconstruction system based on ultrafast optical axial scanning. Opt. Express 2023, 31, 21721–21730. [Google Scholar] [CrossRef] [PubMed]
- Mitton, D.; Zhao, K.; Bertrand, S.; Zhao, C.; Laporte, S.; Yang, C.; An, K.N.; Skalli, W. 3D reconstruction of the ribs from lateral and frontal X-rays in comparison to 3D CT-scan reconstruction. J. Biomech. 2008, 41, 706–710. [Google Scholar] [CrossRef] [PubMed]
- Reyneke, C.J.F.; Lüthi, M.; Burdin, V.; Douglas, T.S.; Vetter, T.; Mutsvangwa, T.E. Review of 2-D/3-D reconstruction using statistical shape and intensity models and X-ray image synthesis: Toward a unified framework. IEEE Rev. Biomed. Eng. 2018, 12, 269–286. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Ye, M.; Liu, Z.; Wang, C. Precision of cortical bone reconstruction based on 3D CT scans. Comput. Med. Imaging Graph. 2009, 33, 235–241. [Google Scholar] [CrossRef] [PubMed]
- Yu, B.; Fan, W.; Fan, J.H.; Dijkstra, T.A.; Wei, Y.N.; Wei, T.T. X-ray micro-computed tomography (μ-CT) for 3D characterization of particle kinematics representing water-induced loess micro-fabric collapse. Eng. Geol. 2020, 279, 105895. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. Semin. Graph. Pioneer. Efforts That Shaped Field 1998, 1, 347–353. [Google Scholar]
- Evans, L.M.; Margetts, L.; Casalegno, V.; Lever, L.M.; Bushell, J.; Lowe, T.; Wallwork, A.; Young, P.; Lindemann, A.; Schmidt, M.; et al. Transient thermal finite element analysis of CFC–Cu ITER monoblock using X-ray tomography data. Fusion Eng. Des. 2015, 100, 100–111. [Google Scholar] [CrossRef]
- Uhm, K.H.; Shin, H.K.; Cho, H.J.; Jung, S.W.; Ko, S.J. 3D Reconstruction Based on Multi-Phase CT for Kidney Cancer Surgery. In Proceedings of the 2023 International Technical Conference on Circuits/Systems, Computers, and Communications (ITC-CSCC), Grand Hyatt Jeju, Republic of Korea, 25–28 June 2023. [Google Scholar]
- Kowarschik, R.M.; Kuehmstedt, P.; Gerber, J.; Schreiber, W.; Notni, G. Adaptive optical 3-D-measurement with structured light. Opt. Eng. 2000, 39, 150–158. [Google Scholar]
- Zhang, S.; Yau, S.-T. High dynamic range scanning technique. Opt. Eng. 2009, 48, 033604. [Google Scholar]
- Ekstrand, L.; Zhang, S. Autoexposure for 3D shape measurement using a digital-light-processing projector. Opt. Eng. 2011, 50, 123603. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, P.; Li, X.; Sun, C. 3D laser scanner system using high dynamic range imaging. Opt. Lasers Eng. 2014, 54, 31–41. [Google Scholar]
- Jiang, Y.; Jiang, K.; Lin, J. Extraction method for sub-pixel center of linear structured light stripe. Laser Optoelectron. Prog. 2015, 7, 179–185. [Google Scholar]
- Santolaria, J.; Guillomía, D.; Cajal, C.; Albajez, J.A.; Aguilar, J.J. Modelling and calibration technique of laser triangulation sensors for integration in robot arms and articulated arm coordinate measuring machines. Sensors 2009, 9, 7374–7396. [Google Scholar] [CrossRef] [PubMed]
- Hyun, J.-S.; Chiu, G.T.-C.; Zhang, S. High-speed and high-accuracy 3D surface measurement using a mechanical projector. Opt. Express 2018, 26, 1474–1487. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zhang, Q.; Liu, Y.; Yu, X.; Hou, Y.; Chen, W. High-speed 3D shape measurement using a rotary mechanical projector. Opt. Express 2021, 29, 7885–7903. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Luo, B.; Su, X.; Li, L.; Li, B.; Zhang, S.; Wang, Y. A convenient 3D reconstruction model based on parallel-axis structured light system. Opt. Lasers Eng. 2021, 138, 106366. [Google Scholar] [CrossRef]
- Stipes, J.A.; Cole, J.G.P.; Humphreys, J. 4D scan registration with the SR-3000 LIDAR. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]
- Chua, S.Y.; Wang, X.; Guo, N.; Tan, C.S.; Chai, T.Y.; Seet, G.L. Improving three-dimensional (3D) range gated reconstruction through time-of-flight (TOF) imaging analysis. J. Eur. Opt. Soc.-Rapid Publ. 2016, 11, 16015. [Google Scholar] [CrossRef]
- Woodham, R.J. Photometric method for determining surface orientation from multiple images. Opt. Eng. 1980, 19, 139–144. [Google Scholar] [CrossRef]
- Horn, B.K.P. Obtaining shape from shading information. In Shape from Shading; MIT Press: Cambridge, MA, USA, 1989; pp. 123–171. [Google Scholar]
- Shi, B.; Wu, Z.; Mo, Z.; Duan, D.; Yeung, S.K.; Tan, P. A benchmark dataset and evaluation for non-lambertian and uncalibrated photometric stereo. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Wu, L.; Ganesh, A.; Shi, B.; Matsushita, Y.; Wang, Y.; Ma, Y. Robust photometric stereo via low-rank matrix completion and recovery. In Proceedings of the Computer Vision–ACCV 2010: 10th Asian Conference on Computer Vision, Queenstown, New Zealand, 8–12 November 2010; Revised Selected Papers, Part III 10. Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Ikehata, S.; Wipf, D.; Matsushita, Y.; Aizawa, K. Robust photometric stereo using sparse regression. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Alldrin, N.G.; Mallick, S.P.; Kriegman, D.J. Resolving the generalized bas-relief ambiguity by entropy minimization. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Karami, A.; Menna, F.; Remondino, F. Investigating 3D reconstruction of non-collaborative surfaces through photogrammetry and photometric stereo. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 519–526. [Google Scholar] [CrossRef]
- Ju, Y.; Jian, M.; Wang, C.; Zhang, C.; Dong, J.; Lam, K.M. Estimating high-resolution surface normals via low-resolution photometric stereo images. IEEE Trans. Circuits Syst. Video Technol. 2023. [Google Scholar] [CrossRef]
- Daum, M.; Dudek, G. On 3-D surface reconstruction using shape from shadows. In Proceedings of the 1998 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No. 98CB36231), Santa Barnara, CA, USA, 23–25 June 1998. [Google Scholar]
- McCool, M.D. Shadow volume reconstruction from depth maps. ACM Trans. Graph. (TOG) 2000, 19, 1–26. [Google Scholar] [CrossRef]
- Liu, W.C.; Wu, B. An integrated photogrammetric and photoclinometric approach for illumination-invariant pixel-resolution 3D mapping of the lunar surface. ISPRS J. Photogramm. Remote Sens. 2020, 159, 153–168. [Google Scholar] [CrossRef]
- Li, Z.; Ji, S.; Fan, D.; Yan, Z.; Wang, F.; Wang, R. Reconstruction of 3D Information of Buildings from Single-View Images Based on Shadow Information. ISPRS Int. J. Geo-Inf. 2024, 13, 62. [Google Scholar] [CrossRef]
- Wang, M.; Wei, S.; Liang, J.; Liu, S.; Shi, J.; Zhang, X. Lightweight FISTA-inspired sparse reconstruction network for mmW 3-D holography. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–20. [Google Scholar] [CrossRef]
- Schramm, S.; Osterhold, P.; Schmoll, R.; Kroll, A. Combining modern 3D reconstruction and thermal imaging: Generation of large-scale 3D thermograms in real-time. Quant. InfraRed Thermogr. J. 2022, 19, 295–311. [Google Scholar] [CrossRef]
- Geiger, A.; Ziegler, J.; Stiller, C. Stereoscan: Dense 3d reconstruction in real-time. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011. [Google Scholar]
- Costa, A.L.; Yasuda, C.L.; Appenzeller, S.; Lopes, S.L.; Cendes, F. Comparison of conventional MRI and 3D reconstruction model for evaluation of temporomandibular joint. Surg. Radiol. Anat. 2008, 30, 663–667. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-sensor fusion in automated driving: A survey. IEEE Access 2019, 8, 2847–2868. [Google Scholar] [CrossRef]
- Yu, H.; Oh, J. Anytime 3D object reconstruction using multi-modal variational autoencoder. IEEE Robot. Autom. Lett. 2022, 7, 2162–2169. [Google Scholar] [CrossRef]
- Buelthoff, H.H. Shape from X: Psychophysics and computation. In Computational Models of Visual Processing, Proceedings of the Sensor Fusion III: 3-D Perception and Recognition, Boston, MA, USA, 4–9 November 1990; Society of Photo-Optical Instrumentation Engineers: Bellingham, WA, USA, 1991; pp. 235–246. [Google Scholar]
- Yemez, Y.; Schmitt, F. 3D reconstruction of real objects with high resolution shape and texture. Image Vis. Comput. 2004, 22, 1137–1153. [Google Scholar] [CrossRef]
- Alexiadis, D.S.; Zarpalas, D.; Daras, P. Real-time, realistic full-body 3D reconstruction and texture mapping from multiple Kinects. In Proceedings of the IVMSP 2013, Seoul, Republic of Korea, 10–12 June 2013. [Google Scholar]
- Lee, J.H.; Ha, H.; Dong, Y.; Tong, X.; Kim, M.H. Texturefusion: High-quality texture acquisition for real-time rgb-d scanning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Xu, K.; Wang, M.; Wang, M.; Feng, L.; Zhang, T.; Liu, X. Enhancing Texture Generation with High-Fidelity Using Advanced Texture Priors. arXiv 2024, arXiv:2403.05102. [Google Scholar]
- Qin, K.; Wang, Z. 3D Reconstruction of metal parts based on depth from focus. In Proceedings of the 2011 International Conference on Electronic and Mechanical Engineering and Information Technology, Harbin, China, 12–14 August 2011; Volume 2. [Google Scholar]
- Martišek, D. Fast Shape-From-Focus method for 3D object reconstruction. Optik 2018, 169, 16–26. [Google Scholar] [CrossRef]
- Lee, I.-H.; Shim, S.-O.; Choi, T.-S. Improving focus measurement via variable window shape on surface radiance distribution for 3D shape reconstruction. Opt. Lasers Eng. 2013, 51, 520–526. [Google Scholar] [CrossRef]
- Li, M.; Mutahira, H.; Ahmad, B.; Muhammad, M.S. Analyzing image focus using deep neural network for 3d shape recovery. In Proceedings of the 2019 Second International Conference on Latest Trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 13–14 November 2019. [Google Scholar]
- Ali, U.; Mahmood, M.T. Combining depth maps through 3D weighted least squares in shape from focus. In Proceedings of the 2019 International Conference on Electronics, Information, and Communication (ICEIC), Auckland, New Zealand, 22–25 January 2019. [Google Scholar]
- Yan, T.; Hu, Z.; Qian, Y.; Qiao, Z.; Zhang, L. 3D shape reconstruction from multifocus image fusion using a multidirectional modified Laplacian operator. Pattern Recognit. 2020, 98, 107065. [Google Scholar] [CrossRef]
- Shang, M.; Kuang, T.; Zhou, H.; Yu, F. Monocular Microscopic Image 3D Reconstruction Algorithm based on Depth from Defocus with Adaptive Window Selection. In Proceedings of the 2020 12th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 22–23 August 2020; Volume 2. [Google Scholar]
- Julesz, B. Binocular depth perception of computer-generated patterns. Bell Syst. Tech. J. 1960, 39, 1125–1162. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Whelan, T.; Kaess, M.; Fallon, M.; Johannsson, H.; Leonard, J.; McDonald, J. Kintinuous: Spatially extended kinectfusion. In Proceedings of the RSS’12 Workshop on RGB-D: Advanced Reasoning with Depth Cameras, Sydney, Australia, 9–10 July 2012. [Google Scholar]
- Whelan, T.; Leutenegger, S.; Salas-Moreno, R.F.; Glocker, B.; Davison, A.J. ElasticFusion: Dense SLAM without a pose graph. Robot. Sci. Syst. 2015, 11, 3. [Google Scholar]
- Choi, S.; Zhou, Q.-Y.; Koltun, V. Robust reconstruction of indoor scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Tian, X.; Liu, R.; Wang, Z.; Ma, J. High quality 3D reconstruction based on fusion of polarization imaging and binocular stereo vision. Inf. Fusion 2022, 77, 19–28. [Google Scholar] [CrossRef]
- Wang, D.; Sun, H.; Lu, W.; Zhao, W.; Liu, Y.; Chai, P.; Han, Y. A novel binocular vision system for accurate 3-D reconstruction in large-scale scene based on improved calibration and stereo matching methods. Multimed. Tools Appl. 2022, 81, 26265–26281. [Google Scholar] [CrossRef]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1979, 203, 405–426. [Google Scholar]
- Wu, C. Towards linear-time incremental structure from motion. In Proceedings of the 2013 International Conference on 3D Vision-3DV 2013, Seattle, WA, USA, 29 June–1 July 2013. [Google Scholar]
- Cui, H.; Shen, S.; Gao, W.; Hu, Z. Efficient large-scale structure from motion by fusing auxiliary imaging information. IEEE Trans. Image Process. 2015, 24, 3561–3573. [Google Scholar] [PubMed]
- Cui, H.; Gao, X.; Shen, S.; Hu, Z. HSfM: Hybrid structure-from-motion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Xu, B.; Zhang, L.; Liu, Y.; Ai, H.; Wang, B.; Sun, Y.; Fan, Z. Robust hierarchical structure from motion for large-scale unstructured image sets. ISPRS J. Photogramm. Remote Sens. 2021, 181, 367–384. [Google Scholar] [CrossRef]
- Kanade, T.; Morris, D.D. Factorization methods for structure from motion. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 356, 1153–1173. [Google Scholar] [CrossRef]
- Gay, P.; Rubino, C.; Crocco, M.; Del Bue, A. Factorization based structure from motion with object priors. Comput. Vis. Image Underst. 2018, 172, 124–137. [Google Scholar] [CrossRef]
- Cin, A.P.D.; Boracchi, G.; Magri, L. Multi-body Depth and Camera Pose Estimation from Multiple Views. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023. [Google Scholar]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1. [Google Scholar]
- Moulon, P.; Monasse, P.; Marlet, R. Global fusion of relative motions for robust, accurate and scalable structure from motion. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013. [Google Scholar]
- Hepp, B.; Nießner, M.; Hilliges, O. Plan3d: Viewpoint and trajectory optimization for aerial multi-view stereo reconstruction. ACM Trans. Graph. TOG 2018, 38, 1–17. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, Z.; Hu, H.; Xie, L.; Ge, X.; Zhang, Y. Leveraging photogrammetric mesh models for aerial-ground feature point matching toward integrated 3D reconstruction. ISPRS J. Photogramm. Remote Sens. 2020, 166, 26–40. [Google Scholar] [CrossRef]
- Shen, S. Accurate multiple view 3d reconstruction using patch-based stereo for large-scale scenes. IEEE Trans. Image Process. 2013, 22, 1901–1914. [Google Scholar] [CrossRef] [PubMed]
- Stereopsis, R.M. Accurate, dense, and robust multiview stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1362–1376. [Google Scholar]
- Vu, H.H.; Labatut, P.; Pons, J.P.; Keriven, R. High accuracy and visibility-consistent dense multiview stereo. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 889–901. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Yang, F.; Huang, Y.; Zhang, Y.; Wu, G. Single-shot 3D reconstruction using grid pattern-based structured-light vision method. Appl. Sci. 2022, 12, 10602. [Google Scholar] [CrossRef]
- Ye, Z.; Bao, C.; Zhou, X.; Liu, H.; Bao, H.; Zhang, G. Ec-sfm: Efficient covisibility -based structure-from-motion for both sequential and unordered images. IEEE Trans. Circuits Syst. Video Technol. 2023, 34, 110–123. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef]
- Fu, Y.; Rong, S.; Liu, E.; Bao, Q. Calibration method and regulation algorithm of binocular distance measurement in the large scene of image monitoring for overhead transmission lines. High Volt. Eng. 2019, 45, 377–385. [Google Scholar]
- Selby, B.P.; Sakas, G.; Groch, W.D.; Stilla, U. Patient positioning with X-ray detector self-calibration for image guided therapy. Australas. Phys. Eng. Sci. Med. 2011, 34, 391–400. [Google Scholar] [CrossRef] [PubMed]
- Maybank, S.J.; Faugeras, O.D. A theory of self-calibration of a moving camera. Int. J. Comput. Vis. 1992, 8, 123–151. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Smith, S.M.; Brady, J.M. SUSAN—A new approach to low level image processing. Int. J. Comput. Vis. 1997, 23, 45–78. [Google Scholar] [CrossRef]
- Shi, J. Good features to track. In Proceedings of the 1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994. [Google Scholar]
- Rosten, E.; Drummond, T. Machine learning for high-speed corner detection. In Proceedings of the Computer Vision–ECCV 2006: 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Proceedings, Part I 9. Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Lindeberg, T. Detecting salient blob-like image structures and their scales with a scale-space primal sketch: A method for focus-of-attention. Int. J. Comput. Vis. 1993, 11, 283–318. [Google Scholar] [CrossRef]
- Lindeberg, T. Edge detection and ridge detection with automatic scale selection. Int. J. Comput. Vis. 1998, 30, 117–156. [Google Scholar] [CrossRef]
- Cho, Y.; Kim, D.; Saeed, S.; Kakli, M.U.; Jung, S.H.; Seo, J.; Park, U. Keypoint detection using higher order Laplacian of Gaussian. IEEE Access 2020, 8, 10416–10425. [Google Scholar] [CrossRef]
- Peng, K.; Chen, X.; Zhou, D.; Liu, Y. 3D reconstruction based on SIFT and Harris feature points. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009. [Google Scholar]
- Shaker, S.H.; Hamza, N.A. 3D Face Reconstruction Using Structure from Motion Technique. Iraqi J. Inf. Technol. V 2019, 9, 2018. [Google Scholar] [CrossRef]
- Yamada, K.; Kimura, A. A performance evaluation of keypoints detection methods SIFT and AKAZE for 3D reconstruction. In Proceedings of the 2018 International Workshop on Advanced Image Technology (IWAIT), Chiang Mai, Thailand, 7–9 January 2018. [Google Scholar]
- Wu, S.; Feng, B. Parallel SURF Algorithm for 3D Reconstruction. In Proceedings of the 2019 International Conference on Modeling, Simulation, Optimization and Numerical Techniques (SMONT 2019), Shenzhen, China, 27–28 February 2019; Atlantis Press: Dordrecht, The Netherlands, 2019. [Google Scholar]
- Dawood, M.; Cappelle, C.; El Najjar, M.E.; Khalil, M.; Pomorski, D. Harris, SIFT and SURF features comparison for vehicle localization based on virtual 3D model and camera. In Proceedings of the 2012 3rd International Conference on Image Processing Theory, Tools and Applications (IPTA), Istanbul, Turkey, 15–18 October 2012. [Google Scholar]
- Hafiz, D.A.; Youssef, B.A.; Sheta, W.M.; Hassan, H.A. Interest point detection in 3D point cloud data using 3D Sobel-Harris operator. Int. J. Pattern Recognit. Artif. Intell. 2015, 29, 1555014. [Google Scholar] [CrossRef]
- Schmid, B.J.; Adhami, R. Building descriptors from local feature neighborhoods for applications in semi-dense 3D reconstruction. IEEE Trans. Image Process. 2018, 27, 5491–5500. [Google Scholar] [CrossRef] [PubMed]
- Cao, M.; Jia, W.; Li, S.; Li, Y.; Zheng, L.; Liu, X. GPU-accelerated feature tracking for 3D reconstruction. Opt. Laser Technol. 2019, 110, 165–175. [Google Scholar] [CrossRef]
- Fan, B.; Kong, Q.; Wang, X.; Wang, Z.; Xiang, S.; Pan, C.; Fua, P. A performance evaluation of local features for image-based 3D reconstruction. IEEE Trans. Image Process. 2019, 28, 4774–4789. [Google Scholar] [CrossRef] [PubMed]
- Lv, Q.; Lin, H.; Wang, G.; Wei, H.; Wang, Y. ORB-SLAM-based tracing and 3D reconstruction for robot using Kinect 2.0. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017. [Google Scholar]
- Ali, S.G.; Chen, Y.; Sheng, B.; Li, H.; Wu, Q.; Yang, P.; Muhammad, K.; Yang, G. Cost-effective broad learning-based ultrasound biomicroscopy with 3D reconstruction for ocular anterior segmentation. Multimed. Tools Appl. 2021, 80, 35105–35122. [Google Scholar] [CrossRef]
- Hane, C.; Zach, C.; Cohen, A.; Angst, R.; Pollefeys, M. Joint 3D scene reconstruction and class segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Yücer, K.; Sorkine-Hornung, A.; Wang, O.; Sorkine-Hornung, O. Efficient 3D object segmentation from densely sampled light fields with applications to 3D reconstruction. ACM Trans. Graph. TOG 2016, 35, 1–15. [Google Scholar] [CrossRef]
- Vargas, R.; Pineda, J.; Marrugo, A.G.; Romero, L.A. Background intensity removal in structured light three-dimensional reconstruction. In Proceedings of the 2016 XXI Symposium on Signal Processing, Images and Artificial Vision (STSIVA), Bucaramanga, Colombia, 31 August–2 September 2016. [Google Scholar]
- Colombo, M.; Bologna, M.; Garbey, M.; Berceli, S.; He, Y.; Matas, J.F.R.; Migliavacca, F.; Chiastra, C. Computing patient-specific hemodynamics in stented femoral artery models obtained from computed tomography using a validated 3D reconstruction method. Med. Eng. Phys. 2020, 75, 23–35. [Google Scholar] [CrossRef] [PubMed]
- Jin, A.; Fu, Q.; Deng, Z. Contour-based 3d modeling through joint embedding of shapes and contours. In Proceedings of the Symposium on Interactive 3D Graphics And games, San Francisco, CA, USA, 5–7 May 2020. [Google Scholar]
- Xu, Z.; Kang, R.; Lu, R. 3D reconstruction and measurement of surface defects in prefabricated elements using point clouds. J. Comput. Civ. Eng. 2020, 34, 04020033. [Google Scholar] [CrossRef]
- Banerjee, A.; Camps, J.; Zacur, E.; Andrews, C.M.; Rudy, Y.; Choudhury, R.P.; Rodriguez, B.; Grau, V. A completely automated pipeline for 3D reconstruction of human heart from 2D cine magnetic resonance slices. Philos. Trans. R. Soc. A 2021, 379, 20200257. [Google Scholar] [CrossRef]
- Maken, P.; Gupta, A. 2D-to-3D: A review for computational 3D image reconstruction from X-ray images. Arch. Comput. Methods Eng. 2023, 30, 85–114. [Google Scholar] [CrossRef]
- Kundu, A.; Li, Y.; Dellaert, F.; Li, F.; Rehg, J.M. Joint semantic segmentation and 3d reconstruction from monocular video. In Proceedings of the Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Proceedings, Part VI 13. Springer International Publishing: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Kundu, A.; Yin, X.; Fathi, A.; Ross, D.; Brewington, B.; Funkhouser, T.; Pantofaru, C. Virtual multi-view fusion for 3d semantic segmentation. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXIV 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Hu, D.; Gan, V.J.L.; Yin, C. Robot-assisted mobile scanning for automated 3D reconstruction and point cloud semantic segmentation of building interiors. Autom. Constr. 2023, 152, 104949. [Google Scholar] [CrossRef]
- Jiang, C.; Paudel, D.P.; Fougerolle, Y.; Fofi, D.; Demonceaux, C. Static-map and dynamic object reconstruction in outdoor scenes using 3-d motion segmentation. IEEE Robot. Autom. Lett. 2016, 1, 324–331. [Google Scholar] [CrossRef]
- Wang, C.; Luo, B.; Zhang, Y.; Zhao, Q.; Yin, L.; Wang, W.; Su, X.; Wang, Y.; Li, C. DymSLAM: 4D dynamic scene reconstruction based on geometrical motion segmentation. IEEE Robot. Autom. Lett. 2020, 6, 550–557. [Google Scholar] [CrossRef]
- Ingale, A.K. Real-time 3D reconstruction techniques applied in dynamic scenes: A systematic literature review. Comput. Sci. Rev. 2021, 39, 100338. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Q.; Cole, F.; Tucker, R.; Snavely, N. Dynibar: Neural dynamic image-based rendering. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Yang, L.; Cai, H. Enhanced visual SLAM for construction robots by efficient integration of dynamic object segmentation and scene semantics. Adv. Eng. Inform. 2024, 59, 102313. [Google Scholar] [CrossRef]
- Pathegama, M.P.; Göl, Ö. Edge-end pixel extraction for edge-based image segmentation. Int. J. Comput. Inf. Eng. 2007, 1, 453–456. [Google Scholar]
- Phan, T.B.; Trinh, D.H.; Wolf, D.; Daul, C. Optical flow-based structure-from-motion for the reconstruction of epithelial surfaces. Pattern Recognit. 2020, 105, 107391. [Google Scholar] [CrossRef]
- Weng, N.; Yang, Y.H.; Pierson, R. 3D surface reconstruction using optical flow for medical imaging. IEEE Trans. Med. Imaging 1997, 16, 630–641. [Google Scholar] [CrossRef]
- Barghout, L.; Sheynin, J. Real-world scene perception and perceptual organization: Lessons from Computer Vision. J. Vis. 2013, 13, 709. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18. Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Hao, M.; Zhang, D.; Zou, P.; Zhang, W. Fusion PSPnet image segmentation based method for multi-focus image fusion. IEEE Photonics J. 2019, 11, 1–12. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Wang, X.; Girshick, R.; Gupta, A.; He, K. Non-local neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Kirillov, A.; Mintun, E.; Ravi, N.; Mao, H.; Rolland, C.; Gustafson, L.; Xiao, T.; Whitehead, S.; Berg, A.C.; Lo, W.Y.; et al. Segment anything. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023. [Google Scholar]
- Sun, J.; Wang, X.; Wang, L.; Li, X.; Zhang, Y.; Zhang, H.; Liu, Y. Next3d: Generative neural texture rasterization for 3d-aware head avatars. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 20991–21002. [Google Scholar]
- Dib, A.; Bharaj, G.; Ahn, J.; Thébault, C.; Gosselin, P.; Romeo, M.; Chevallier, L. Practical face reconstruction via differentiable ray tracing. Comput. Graph. Forum 2021, 40, 153–164. [Google Scholar] [CrossRef]
- Zwicker, M.; Jarosz, W.; Lehtinen, J.; Moon, B.; Ramamoorthi, R.; Rousselle, F.; Sen, P.; Soler, C.; Yoon, S.E. Recent advances in adaptive sampling and reconstruction for Monte Carlo rendering. Comput. Graph. Forum 2015, 34, 667–681. [Google Scholar] [CrossRef]
- Azinovic, D.; Li, T.M.; Kaplanyan, A.; Nießner, M. Inverse path tracing for joint material and lighting estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2447–2456. [Google Scholar]
- Khadka, A.R.; Remagnino, P.; Argyriou, V. Object 3D reconstruction based on photometric stereo and inverted rendering. In Proceedings of the 2018 14th International Conference on Signal-Image Technology and Internet-Based Systems (SITIS), Las Palmas de Gran Canaria, Spain, 26–29 November 2018; pp. 208–215. [Google Scholar]
- Savarese, S.; Andreetto, M.; Rushmeier, H.; Bernardini, F.; Perona, P. 3d reconstruction by shadow carving: Theory and practical evaluation. Int. J. Comput. Vis. 2007, 71, 305–336. [Google Scholar] [CrossRef]
- Beeler, T.; Bradley, D.; Zimmer, H.; Gross, M. Improved reconstruction of deforming surfaces by cancelling ambient occlusion. In Proceedings of the Computer Vision–ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Proceedings, Part I 12. Springer: Berlin/Heidelberg, Germany, 2012; pp. 30–43. [Google Scholar]
- Buchholz, H.; Döllner, J.; Nienhaus, M.; Kirsch, F. Realtime non-photorealistic rendering of 3D city models. In Proceedings of the 1st International Workshop on Next Generation 3D City Models, Bonn, Germany, 21–22 June 2005; pp. 83–88. [Google Scholar]
- Levoy, M. Display of surfaces from volume data. IEEE Comput. Graph. Appl. 1988, 8, 29–37. [Google Scholar] [CrossRef]
- Lacroute, P.; Levoy, M. Fast volume rendering using a shear-warp factorization of the viewing transformation. In Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 24–29 July 1994; pp. 451–458. [Google Scholar]
- Zwicker, M.; Pfister, H.; Van Baar, J.; Gross, M. EWA splatting. IEEE Trans. Vis. Comput. Graph. 2002, 8, 223–238. [Google Scholar] [CrossRef]
- Yu, T.; Guo, K.; Xu, F.; Dong, Y.; Su, Z.; Zhao, J.; Li, J.; Dai, Q.; Liu, Y. Bodyfusion: Real-time capture of human motion and surface geometry using a single depth camera. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 910–919. [Google Scholar]
- Shao, R.; Zheng, Z.; Tu, H.; Liu, B.; Zhang, H.; Liu, Y. Tensor4d: Efficient neural 4d decomposition for high-fidelity dynamic reconstruction and rendering. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 16632–16642. [Google Scholar]
- Sun, K.; Zhang, J.; Liu, J.; Yu, R.; Song, Z. DRCNN: Dynamic routing convolutional neural network for multi-view 3D object recognition. IEEE Trans. Image Process. 2020, 30, 868–877. [Google Scholar] [CrossRef] [PubMed]
- Schmied, A.; Fischer, T.; Danelljan, M.; Pollefeys, M.; Yu, F. R3d3: Dense 3d reconstruction of dynamic scenes from multiple cameras. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 3216–3226. [Google Scholar]
- Loper, M.; Mahmood, N.; Romero, J.; Pons-Moll, G.; Black, M.J. SMPL: A skinned multi-person linear model. In Seminal Graphics Papers: Pushing the Boundaries; Association for Computing Machinery: New York, NY, USA, 2023; Volume 2, pp. 851–866. [Google Scholar]
- Romero, J.; Tzionas, D.; Black, M.J. Embodied hands: Modeling and capturing hands and bodies together. arXiv 2022, arXiv:2201.02610. [Google Scholar] [CrossRef]
- Matsuyama, T.; Wu, X.; Takai, T.; Wada, T. Real-time dynamic 3-D object shape reconstruction and high-fidelity texture mapping for 3-D video. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 357–369. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Fox, D.; Seitz, S.M. Dynamicfusion: Reconstruction and tracking of non-rigid scenes in real-time. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 343–352. [Google Scholar]
- Innmann, M.; Zollhöfer, M.; Nießner, M.; Theobalt, C.; Stamminger, M. Volumedeform: Real-time volumetric non-rigid reconstruction. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part VIII 14. Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 362–379. [Google Scholar]
- Yu, T.; Zheng, Z.; Guo, K.; Zhao, J.; Dai, Q.; Li, H.; Pons-Moll, G.; Liu, Y. Doublefusion: Real-time capture of human performances with inner body shapes from a single depth sensor. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7287–7296. [Google Scholar]
- Dou, M.; Khamis, S.; Degtyarev, Y.; Davidson, P.; Fanello, S.R.; Kowdle, A.; Escolano, S.O.; Rhemann, C.; Kim, D.; Taylor, J.; et al. Fusion4d: Real-time performance capture of challenging scenes. ACM Trans. Graph. ToG 2016, 35, 1–13. [Google Scholar] [CrossRef]
- Lin, W.; Zheng, C.; Yong, J.H.; Xu, F. Occlusionfusion: Occlusion-aware motion estimation for real-time dynamic 3d reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1736–1745. [Google Scholar]
- Pan, Z.; Hou, J.; Yu, L. Optimization RGB-D 3-D reconstruction algorithm based on dynamic SLAM. IEEE Trans. Instrum. Meas. 2023, 72, 1–13. [Google Scholar] [CrossRef]
- Kerbl, B.; Kopanas, G.; Leimkühler, T.; Drettakis, G. 3d gaussian splatting for real-time radiance field rendering. ACM Trans. Graph. 2023, 42, 1–14. [Google Scholar] [CrossRef]
- Yan, Y.; Lin, H.; Zhou, C.; Wang, W.; Sun, H.; Zhan, K.; Lang, X.; Zhou, X.; Peng, S. Street gaussians for modeling dynamic urban scenes. arXiv 2024, arXiv:2401.01339. [Google Scholar]
- Guédon, A.; Lepetit, V. Sugar: Surface-aligned gaussian splatting for efficient 3d mesh reconstruction and high-quality mesh rendering. arXiv 2023, arXiv:2311.12775. [Google Scholar]
- Xie, T.; Zong, Z.; Qiu, Y.; Li, X.; Feng, Y.; Yang, Y.; Jiang, C. Physgaussian: Physics-integrated 3d gaussians for generative dynamics. arXiv 2023, arXiv:2311.12198. [Google Scholar]
- Chen, G.; Wang, W. A survey on 3d gaussian splatting. arXiv 2024, arXiv:2401.03890. [Google Scholar]
- Meyer, L.; Erich, F.; Yoshiyasu, Y.; Stamminger, M.; Ando, N.; Domae, Y. PEGASUS: Physically Enhanced Gaussian Splatting Simulation System for 6DOF Object Pose Dataset Generation. arXiv 2024, arXiv:2401.02281. [Google Scholar]
- Chung, J.; Oh, J.; Lee, K.M. Depth-regularized optimization for 3d gaussian splatting in few-shot images. arXiv 2023, arXiv:2311.13398. [Google Scholar]
- Wu, G.; Yi, T.; Fang, J.; Xie, L.; Zhang, X.; Wei, W.; Liu, W.; Tian, Q.; Wang, X. 4d gaussian splatting for real-time dynamic scene rendering. arXiv 2023, arXiv:2310.08528. [Google Scholar]
- Liu, Y.; Li, C.; Yang, C.; Yuan, Y. EndoGaussian: Gaussian Splatting for Deformable Surgical Scene Reconstruction. arXiv 2024, arXiv:2401.12561. [Google Scholar]
- Lin, J.; Li, Z.; Tang, X.; Liu, J.; Liu, S.; Liu, J.; Lu, Y.; Wu, X.; Xu, S.; Yan, Y.; et al. VastGaussian: Vast 3D Gaussians for Large Scene Reconstruction. arXiv 2024, arXiv:2402.17427. [Google Scholar]
- Jiang, Z.; Rahmani, H.; Black, S.; Williams, B.M. 3D Points Splatting for Real-Time Dynamic Hand Reconstruction. arXiv 2023, arXiv:2312.13770. [Google Scholar]
- Chen, H.; Li, C.; Lee, G.H. Neusg: Neural implicit surface reconstruction with 3d gaussian splatting guidance. arXiv 2023, arXiv:2312.00846. [Google Scholar]
- Gao, L.; Yang, J.; Zhang, B.T.; Sun, J.M.; Yuan, Y.J.; Fu, H.; Lai, Y.K. Mesh-based Gaussian Splatting for Real-time Large-scale Deformation. arXiv 2024, arXiv:2402.04796. [Google Scholar]
- Magnabosco, M.; Breckon, T.P. Cross-spectral visual simultaneous localization and mapping (SLAM) with sensor handover. Robot. Auton. Syst. 2013, 61, 195–208. [Google Scholar] [CrossRef]
- Li, M.; He, J.; Jiang, G.; Wang, H. DDN-SLAM: Real-time Dense Dynamic Neural Implicit SLAM with Joint Semantic Encoding. arXiv 2024, arXiv:2401.01545. [Google Scholar]
- Bloesch, M.; Czarnowski, J.; Clark, R.; Leutenegger, S.; Davison, A.J. Codeslam—Learning a compact, optimisable representation for dense visual slam. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2560–2568. [Google Scholar]
- Rosinol, A.; Leonard, J.J.; Carlone, L. Nerf-slam: Real-time dense monocular slam with neural radiance fields. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 3437–3444. [Google Scholar]
- Weingarten, J.; Siegwart, R. EKF-based 3D SLAM for structured environment reconstruction. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3834–3839. [Google Scholar]
- Li, T.; Hailes, S.; Julier, S.; Liu, M. UAV-based SLAM and 3D reconstruction system. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 2496–2501. [Google Scholar]
- Zhang, Y.; Tosi, F.; Mattoccia, S.; Poggi, M. Go-slam: Global optimization for consistent 3d instant reconstruction. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 3727–3737. [Google Scholar]
- Yan, C.; Qu, D.; Wang, D.; Xu, D.; Wang, Z.; Zhao, B.; Li, X. Gs-slam: Dense visual slam with 3d gaussian splatting. arXiv 2023, arXiv:2311.11700. [Google Scholar]
- Matsuki, H.; Murai, R.; Kelly, P.H.; Davison, A.J. Gaussian splatting slam. arXiv 2023, arXiv:2312.06741. [Google Scholar]
- Blanz, V.; Mehl, A.; Vetter, T.; Seidel, H.P. A statistical method for robust 3D surface reconstruction from sparse data. In Proceedings of the 2nd International Symposium on 3D Data Processing, Visualization and Transmission, 3DPVT 2004, Thessaloniki, Greece, 6–9 September 2004; pp. 293–300. [Google Scholar]
- Zuffi, S.; Kanazawa, A.; Jacobs, D.W.; Black, M.J. 3D menagerie: Modeling the 3D shape and pose of animals. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6365–6373. [Google Scholar]
- Fernando KR, M.; Tsokos, C.P. Deep and statistical learning in biomedical imaging: State of the art in 3D MRI brain tumor segmentation. Inf. Fusion 2023, 92, 450–465. [Google Scholar] [CrossRef]
- Huang, Y.; Zheng, W.; Zhang, Y.; Zhou, J.; Lu, J. Tri-perspective view for vision-based 3d semantic occupancy prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 9223–9232. [Google Scholar]
- Ming, Z.; Berrio, J.S.; Shan, M.; Worrall, S. InverseMatrixVT3D: An Efficient Projection Matrix-Based Approach for 3D Occupancy Prediction. arXiv 2024, arXiv:2401.12422. [Google Scholar]
- Li, X.; Liu, S.; Kim, K.; De Mello, S.; Jampani, V.; Yang, M.H.; Kautz, J. Self-supervised single-view 3d reconstruction via semantic consistency. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XIV 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Lin, J.; Yuan, Y.; Shao, T.; Zhou, K. Towards high-fidelity 3d face reconstruction from in-the-wild images using graph convolutional networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 5891–5900. [Google Scholar]
- Wang, S.; Clark, R.; Wen, H.; Trigoni, N. Deepvo: Towards end-to-end visual odometry with deep recurrent convolutional neural networks. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2043–2050. [Google Scholar]
- Jackson, A.S.; Bulat, A.; Argyriou, V.; Tzimiropoulos, G. Large pose 3D face reconstruction from a single image via direct volumetric CNN regression. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1031–1039. [Google Scholar]
- Dou, P.; Shah, S.K.; Kakadiaris, I.A. End-to-end 3D face reconstruction with deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5908–5917. [Google Scholar]
- Yao, Y.; Luo, Z.; Li, S.; Fang, T.; Quan, L. Mvsnet: Depth inference for unstructured multi-view stereo. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 767–783. [Google Scholar]
- Gu, X.; Fan, Z.; Zhu, S.; Dai, Z.; Tan, F.; Tan, P. Cascade cost volume for high-resolution multi-view stereo and stereo matching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 2495–2504. [Google Scholar]
- Sun, J.; Xie, Y.; Chen, L.; Zhou, X.; Bao, H. Neuralrecon: Real-time coherent 3d reconstruction from monocular video. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 15598–15607. [Google Scholar]
- Ju, Y.; Lam, K.M.; Xie, W.; Zhou, H.; Dong, J.; Shi, B. Deep learning methods for calibrated photometric stereo and beyond: A survey. arXiv 2022, arXiv:2212.08414. [Google Scholar]
- Santo, H.; Samejima, M.; Sugano, Y.; Shi, B.; Matsushita, Y. Deep photometric stereo network. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Wang, X.; Jian, Z.; Ren, M. Non-lambertian photometric stereo network based on inverse reflectance model with collocated light. IEEE Trans. Image Process. 2020, 29, 6032–6042. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Han, K.; Shi, B.; Matsushita, Y.; Wong, K.Y.K. Deep photometric stereo for non-lambertian surfaces. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 44, 129–142. [Google Scholar] [CrossRef] [PubMed]
- Ju, Y.; Shi, B.; Chen, Y.; Zhou, H.; Dong, J.; Lam, K.M. GR-PSN: Learning to estimate surface normal and reconstruct photometric stereo images. IEEE Trans. Vis. Comput. Graph. 2023, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Ikehata, S. CNN-PS: CNN-based photometric stereo for general non-convex surfaces. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Ju, Y.; Shi, B.; Jian, M.; Qi, L.; Dong, J.; Lam, K.M. Normattention-psn: A high-frequency region enhanced photometric stereo network with normalized attention. Int. J. Comput. Vis. 2022, 130, 3014–3034. [Google Scholar] [CrossRef]
- Ju, Y.; Dong, J.; Chen, S. Recovering surface normal and arbitrary images: A dual regression network for photometric stereo. IEEE Trans. Image Process. 2021, 30, 3676–3690. [Google Scholar] [CrossRef] [PubMed]
- Ikehata, S. Scalable, detailed and mask-free universal photometric stereo. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Maturana, D.; Scherer, S. Voxnet: A 3d convolutional neural network for real-time object recognition. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Engelcke, M.; Rao, D.; Wang, D.Z.; Tong, C.H.; Posner, I. Vote3deep: Fast object detection in 3d point clouds using efficient convolutional neural networks. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Su, H.; Maji, S.; Kalogerakis, E.; Learned-Miller, E. Multi-view convolutional neural networks for 3d shape recognition. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Yang, Z.; Sun, Y.; Liu, S.; Shen, X.; Jia, J. Std: Sparse-to-dense 3d object detector for point cloud. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30, 5105–5114. [Google Scholar]
- Shi, S.; Wang, X.; Li, H. Pointrcnn: 3d object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Chen, Y.; Fu, M.; Shen, K. Point-BLS: 3D Point Cloud Classification Combining Deep Learning and Broad Learning System. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 21–23 May 2022. [Google Scholar]
- Zhou, Z.; Jin, X.; Liu, L.; Zhou, F. Three-Dimensional Geometry Reconstruction Method from Multi-View ISAR Images Utilizing Deep Learning. Remote Sens. 2023, 15, 1882. [Google Scholar] [CrossRef]
- Xiao, A.; Huang, J.; Guan, D.; Zhang, X.; Lu, S.; Shao, L. Unsupervised point cloud representation learning with deep neural networks: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 11321–11339. [Google Scholar] [CrossRef] [PubMed]
- Kramer, M.A. Nonlinear principal component analysis using autoassociative neural networks. AIChE J. 1991, 37, 233–243. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, C.; Xue, T.; Freeman, B.; Tenenbaum, J. Learning a probabilistic latent space of object shapes via 3d generative-adversarial modeling. Adv. Neural Inf. Process. Syst. 2016, 29, 82–90. [Google Scholar]
- Achlioptas, P.; Diamanti, O.; Mitliagkas, I.; Guibas, L. Learning representations and generative models for 3d point clouds. In Proceedings of the International Conference on Machine Learning, PMLR, Stockholm, Sweden, 10–15 July 2018. [Google Scholar]
- Li, R.; Li, X.; Fu, C.W.; Cohen-Or, D.; Heng, P.A. Pu-gan: A point cloud upsampling adversarial network. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Wen, X.; Li, T.; Han, Z.; Liu, Y.S. Point cloud completion by skip-attention network with hierarchical folding. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Yu, X.; Tang, L.; Rao, Y.; Huang, T.; Zhou, J.; Lu, J. Point-bert: Pre-training 3d point cloud transformers with masked point modeling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]
- Sanghi, A. Info3d: Representation learning on 3d objects using mutual information maximization and contrastive learning. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXIX 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Poursaeed, O.; Jiang, T.; Qiao, H.; Xu, N.; Kim, V.G. Self-supervised learning of point clouds via orientation estimation. In Proceedings of the 2020 International Conference on 3D Vision (3DV), Fukuoka, Japan, 25–28 November 2020. [Google Scholar]
- Chen, Y.; Liu, J.; Ni, B.; Wang, H.; Yang, J.; Liu, N.; Li, T.; Tian, Q. Shape self-correction for unsupervised point cloud understanding. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Mildenhall, B.; Srinivasan, P.P.; Tancik, M.; Barron, J.T.; Ramamoorthi, R.; Ng, R. Nerf: Representing scenes as neural radiance fields for view synthesis. Commun. ACM 2021, 65, 99–106. [Google Scholar] [CrossRef]
- Barron, J.T.; Mildenhall, B.; Tancik, M.; Hedman, P.; Martin-Brualla, R.; Srinivasan, P.P. Mip-nerf: A multiscale representation for anti-aliasing neural radiance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 5855–5864. [Google Scholar]
- Wang, P.; Liu, L.; Liu, Y.; Theobalt, C.; Komura, T.; Wang, W. Neus: Learning neural implicit surfaces by volume rendering for multi-view reconstruction. arXiv 2021, arXiv:2106.10689. [Google Scholar]
- Tancik, M.; Casser, V.; Yan, X.; Pradhan, S.; Mildenhall, B.; Srinivasan, P.P.; Barron, J.T.; Kretzschmar, H. Block-nerf: Scalable large scene neural view synthesis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 8248–8258. [Google Scholar]
- Turki, H.; Ramanan, D.; Satyanarayanan, M. Mega-nerf: Scalable construction of large-scale nerfs for virtual fly-throughs. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 12922–12931. [Google Scholar]
- Müller, T.; Evans, A.; Schied, C.; Keller, A. Instant neural graphics primitives with a multiresolution hash encoding. ACM Trans. Graph. TOG 2022, 41, 1–15. [Google Scholar] [CrossRef]
- Vora, S.; Radwan, N.; Greff, K.; Meyer, H.; Genova, K.; Sajjadi, M.S.; Pot, E.; Tagliasacchi, A.; Duckworth, D. Nesf: Neural semantic fields for generalizable semantic segmentation of 3d scenes. arXiv 2021, arXiv:2111.13260. [Google Scholar]
- Barron, J.T.; Mildenhall, B.; Verbin, D.; Srinivasan, P.P.; Hedman, P. Mip-nerf 360: Unbounded anti-aliased neural radiance fields. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]
- Fu, Q.; Xu, Q.; Ong, Y.S.; Tao, W. Geo-neus: Geometry-consistent neural implicit surfaces learning for multi-view reconstruction. Adv. Neural Inf. Process. Syst. 2022, 35, 3403–3416. [Google Scholar]
- Vinod, V.; Shah, T.; Lagun, D. TEGLO: High Fidelity Canonical Texture Mapping from Single-View Images. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–7 January 2023. [Google Scholar]
- Dai, P.; Tan, F.; Yu, X.; Zhang, Y.; Qi, X. GO-NeRF: Generating Virtual Objects in Neural Radiance Fields. arXiv 2024, arXiv:2401.05750. [Google Scholar]
- Li, M.; Lu, M.; Li, X.; Zhang, S. RustNeRF: Robust Neural Radiance Field with Low-Quality Images. arXiv 2024, arXiv:2401.03257. [Google Scholar]
- Chen, H.; Gu, J.; Chen, A.; Tian, W.; Tu, Z.; Liu, L.; Su, H. Single-stage diffusion nerf: A unified approach to 3d generation and reconstruction. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 2416–2425. [Google Scholar]
- Kania, K.; Yi, K.M.; Kowalski, M.; Trzciński, T.; Tagliasacchi, A. Conerf: Controllable neural radiance fields. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 18623–18632. [Google Scholar]
- Ramazzina, A.; Bijelic, M.; Walz, S.; Sanvito, A.; Scheuble, D.; Heide, F. ScatterNeRF: Seeing Through Fog with Physically-Based Inverse Neural Rendering. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 17957–17968. [Google Scholar]
- Zhu, Y.; Mottaghi, R.; Kolve, E.; Lim, J.J.; Gupta, A.; Fei-Fei, L.; Farhadi, A. Target-driven visual navigation in indoor scenes using deep reinforcement learning. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Han, X.; Zhang, Z.; Du, D.; Yang, M.; Yu, J.; Pan, P.; Yang, X.; Liu, L.; Xiong, Z.; Cui, S. Deep reinforcement learning of volume-guided progressive view inpainting for 3d point scene completion from a single depth image. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Song, H.; Huang, J.; Cao, Y.P.; Mu, T.J. HDR-Net-Fusion: Real-time 3D dynamic scene reconstruction with a hierarchical deep reinforcement network. Comput. Vis. Media 2021, 7, 419–435. [Google Scholar] [CrossRef]
- Li, K.; Li, A.; Xu, Y.; Xiong, H.; Meng, M.Q.H. Rl-tee: Autonomous probe guidance for transesophageal echocardiography based on attention-augmented deep reinforcement learning. IEEE Trans. Autom. Sci. Eng. 2023, 1–13. [Google Scholar] [CrossRef]
- Li, L.; He, F.; Fan, R.; Fan, B.; Yan, X. 3D reconstruction based on hierarchical reinforcement learning with transferability. Integr. Comput.-Aided Eng. 2023, 30, 327–339. [Google Scholar]
- Ze, Y.; Hansen, N.; Chen, Y.; Jain, M.; Wang, X. Visual reinforcement learning with self-supervised 3d representations. IEEE Robot. Autom. Lett. 2023, 8, 2890–2897. [Google Scholar] [CrossRef]
- Gao, Y.; Wu, J.; Yang, X.; Ji, Z. Efficient hierarchical reinforcement learning for mapless navigation with predictive neighbouring space scoring. IEEE Trans. Autom. Sci. Eng. 2023, 1–16. [Google Scholar] [CrossRef]
- Yang, X.; Ji, Z.; Wu, J.; Lai, Y.K.; Wei, C.; Liu, G.; Setchi, R. Hierarchical reinforcement learning with universal policies for multistep robotic manipulation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 4727–4741. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.Y.; Johnson, J.; Malik, J.; Feichtenhofer, C.; Gkioxari, G. Multiview compressive coding for 3D reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 9065–9075. [Google Scholar]
- Pontes, J.K.; Kong, C.; Sridharan, S.; Lucey, S.; Eriksson, A.; Fookes, C. Image2mesh: A learning framework for single image 3d reconstruction. In Proceedings of the Computer Vision–ACCV 2018: 14th Asian Conference on Computer Vision, Perth, Australia, 2–6 December 2018; Revised Selected Papers, Part I 14. Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 365–381. [Google Scholar]
- Feng, Y.; Wu, F.; Shao, X.; Wang, Y.; Zhou, X. Joint 3d face reconstruction and dense alignment with position map regression network. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 534–551. [Google Scholar]
- Favalli, M.; Fornaciai, A.; Isola, I.; Tarquini, S.; Nannipieri, L. Multiview 3D reconstruction in geosciences. Comput. Geosci. 2012, 44, 168–176. [Google Scholar] [CrossRef]
- Yang, B.; Wen, H.; Wang, S.; Clark, R.; Markham, A.; Trigoni, N. 3d object reconstruction from a single depth view with adversarial learning. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 679–688. [Google Scholar]
- Wang, L.; Fang, Y. Unsupervised 3D reconstruction from a single image via adversarial learning. arXiv 2017, arXiv:1711.09312. [Google Scholar]
- Ionescu, C.; Papava, D.; Olaru, V.; Sminchisescu, C. Human3. 6m: Large scale datasets and predictive methods for 3d human sensing in natural environments. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1325–1339. [Google Scholar] [CrossRef] [PubMed]
- Pishchulin, L.; Insafutdinov, E.; Tang, S.; Andres, B.; Andriluka, M.; Gehler, P.V.; Schiele, B. Deepcut: Joint subset partition and labeling for multi person pose estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4929–4937. [Google Scholar]
- Zhang, C.; Pujades, S.; Black, M.J.; Pons-Moll, G. Detailed, accurate, human shape estimation from clothed 3D scan sequences. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Lassner, C.; Romero, J.; Kiefel, M.; Bogo, F.; Black, M.J.; Gehler, P.V. Unite the people: Closing the loop between 3d and 2d human representations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Chen, Q.; Zhang, C.; Liu, W.; Wang, D. SHPD: Surveillance human pose dataset and performance evaluation for coarse-grained pose estimation. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018. [Google Scholar]
- Pavlakos, G.; Choutas, V.; Ghorbani, N.; Bolkart, T.; Osman, A.A.; Tzionas, D.; Black, M.J. Expressive body capture: 3d hands, face, and body from a single image. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Zheng, Z.; Yu, T.; Wei, Y.; Dai, Q.; Liu, Y. Deephuman: 3d human reconstruction from a single image. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Yu, Z.; Yoon, J.S.; Lee, I.K.; Venkatesh, P.; Park, J.; Yu, J.; Park, H.S. Humbi: A large multiview dataset of human body expressions. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Chatzitofis, A.; Saroglou, L.; Boutis, P.; Drakoulis, P.; Zioulis, N.; Subramanyam, S.; Kevelham, B.; Charbonnier, C.; Cesar, P.; Zarpalas, D.; et al. Human4d: A human-centric multimodal dataset for motions and immersive media. IEEE Access 2020, 8, 176241–176262. [Google Scholar] [CrossRef]
- Taheri, O.; Ghorbani, N.; Black, M.J.; Tzionas, D. GRAB: A dataset of whole-body human grasping of objects. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part IV 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Zhu, X.; Liao, T.; Lyu, J.; Yan, X.; Wang, Y.; Guo, K.; Cao, Q.; Li, Z.S.; Lei, Z. Mvp-human dataset for 3d human avatar reconstruction from unconstrained frames. arXiv 2022, arXiv:2204.11184. [Google Scholar]
- Pumarola, A.; Sanchez-Riera, J.; Choi, G.; Sanfeliu, A.; Moreno-Noguer, F. 3dpeople: Modeling the geometry of dressed humans. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A benchmark for the evaluation of RGB-D SLAM systems. In Proceedings of the 2012 IEEE/RSJ international conference on intelligent robots and systems, Vilamoura-Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor segmentation and support inference from rgbd images. In Proceedings of the Computer Vision–ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Proceedings, Part V 12. Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Xiao, J.; Owens, A.; Torralba, A. Sun3d: A database of big spaces reconstructed using sfm and object labels. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013. [Google Scholar]
- Couprie, C.; Farabet, C.; Najman, L.; LeCun, Y. Indoor semantic segmentation using depth information. arXiv 2013, arXiv:1301.3572. [Google Scholar]
- Chang, A.X.; Funkhouser, T.; Guibas, L.; Hanrahan, P.; Huang, Q.; Li, Z.; Savarese, S.; Savva, M.; Song, S.; Su, H.; et al. Shapenet: An information-rich 3d model repository. arXiv 2015, arXiv:1512.03012. [Google Scholar]
- Song, S.; Lichtenberg, S.P.; Xiao, J. Sun rgb-d: A rgb-d scene understanding benchmark suite. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- McCormac, J.; Handa, A.; Leutenegger, S.; Davison, A.J. Scenenet rgb-d: 5m photorealistic images of synthetic indoor trajectories with ground truth. arXiv 2016, arXiv:1612.05079. [Google Scholar]
- Hua, B.S.; Pham, Q.H.; Nguyen, D.T.; Tran, M.K.; Yu, L.F.; Yeung, S.K. Scenenn: A scene meshes dataset with annotations. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016. [Google Scholar]
- Song, S.; Yu, F.; Zeng, A.; Chang, A.X.; Savva, M.; Funkhouser, T. Semantic scene completion from a single depth image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Wasenmüller, O.; Meyer, M.; Stricker, D. CoRBS: Comprehensive RGB-D benchmark for SLAM using Kinect v2. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016. [Google Scholar]
- Chang, A.; Dai, A.; Funkhouser, T.; Halber, M.; Niessner, M.; Savva, M.; Song, S.; Zeng, A.; Zhang, Y. Matterport3d: Learning from rgb-d data in indoor environments. arXiv 2017, arXiv:1709.06158. [Google Scholar]
- Armeni, I.; Sax, S.; Zamir, A.R.; Savarese, S. Joint 2d-3d-semantic data for indoor scene understanding. arXiv 2017, arXiv:1702.01105. [Google Scholar]
- Dai, A.; Chang, A.X.; Savva, M.; Halber, M.; Funkhouser, T.; Nießner, M. Scannet: Richly-annotated 3d reconstructions of indoor scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Li, W.; Saeedi, S.; McCormac, J.; Clark, R.; Tzoumanikas, D.; Ye, Q.; Huang, Y.; Tang, R.; Leutenegger, S. Interiornet: Mega-scale multi-sensor photo-realistic indoor scenes dataset. arXiv 2018, arXiv:1809.00716. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Xiang, Y.; Mottaghi, R.; Savarese, S. Beyond pascal: A benchmark for 3d object detection in the wild. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Steamboat Springs, CO, USA, 24–26 March 2014. [Google Scholar]
- Schops, T.; Schonberger, J.L.; Galliani, S.; Sattler, T.; Schindler, K.; Pollefeys, M.; Geiger, A. A multi-view stereo benchmark with high-resolution images and multi-camera videos. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Hackel, T.; Savinov, N.; Ladicky, L.; Wegner, J.D.; Schindler, K.; Pollefeys, M. Semantic3d. net: A new large-scale point cloud classification benchmark. arXiv 2017, arXiv:1704.03847. [Google Scholar]
- Roynard, X.; Deschaud, J.-E.; Goulette, F. Paris-Lille-3D: A large and high-quality ground-truth urban point cloud dataset for automatic segmentation and classification. Int. J. Robot. Res. 2018, 37, 545–557. [Google Scholar] [CrossRef]
- Song, X.; Wang, P.; Zhou, D.; Zhu, R.; Guan, C.; Dai, Y.; Su, H.; Li, H.; Yang, R. Apollocar3d: A large 3d car instance understanding benchmark for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Gählert, N.; Jourdan, N.; Cordts, M.; Franke, U.; Denzler, J. Cityscapes 3d: Dataset and benchmark for 9 dof vehicle detection. arXiv 2020, arXiv:2006.07864. [Google Scholar]
- Yao, Y.; Luo, Z.; Li, S.; Zhang, J.; Ren, Y.; Zhou, L.; Fang, T.; Quan, L. Blendedmvs: A large-scale dataset for generalized multi-view stereo networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Tong, G.; Li, Y.; Chen, D.; Sun, Q.; Cao, W.; Xiang, G. CSPC-dataset: New LiDAR point cloud dataset and benchmark for large-scale scene semantic segmentation. IEEE Access 2020, 8, 87695–87718. [Google Scholar] [CrossRef]
- Tan, W.; Qin, N.; Ma, L.; Li, Y.; Du, J.; Cai, G.; Yang, K.; Li, J. Toronto-3D: A large-scale mobile LiDAR dataset for semantic segmentation of urban roadways. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Chen, M.; Hu, Q.; Yu, Z.; Thomas, H.; Feng, A.; Hou, Y.; McCullough, K.; Ren, F.; Soibelman, L. Stpls3d: A large-scale synthetic and real aerial photogrammetry 3d point cloud dataset. arXiv 2022, arXiv:2203.09065. [Google Scholar]
- Liao, Y.; Xie, J.; Geiger, A. Kitti-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 3292–3310. [Google Scholar] [CrossRef] [PubMed]
- Jeong, S.; Kim, H.; Cho, Y. DiTer: Diverse Terrain and Multi-Modal Dataset for Field Robot Navigation in Outdoor Environments. IEEE Sens. Lett. 2024, 8, 1–4. [Google Scholar] [CrossRef]
- Zhao, S.; Gao, Y.; Wu, T.; Singh, D.; Jiang, R.; Sun, H.; Sarawata, M.; Whittaker, W.C.; Higgins, I.; Su, S.; et al. SubT-MRS Dataset: Pushing SLAM Towards All-weather Environments. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 17–21 June 2024. [Google Scholar]
- Martin-Martin, R.; Patel, M.; Rezatofighi, H.; Shenoi, A.; Gwak, J.; Frankel, E.; Sadeghian, A.; Savarese, S. Jrdb: A dataset and benchmark of egocentric robot visual perception of humans in built environments. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 45, 6748–6765. [Google Scholar] [CrossRef] [PubMed]
- Shuifa, S.U.N.; Yongheng, T.A.N.G.; Ben, W.A.N.G.; Fangmin, D.O.N.G.; Xiaolong, L.I.; Jiacheng, C.A.I.; Yirong, W.U. A Review of Research on 3D Reconstruction of Dynamic Scenes. J. Front. Comput. Sci. Technol. 2021, 1, 91–97. [Google Scholar]
- Broxton, M.; Flynn, J.; Overbeck, R.; Erickson, D.; Hedman, P.; Duvall, M.; Dourgarian, J.; Busch, J.; Whalen, M.; Debevec, P. Immersive light field video with a layered mesh representation. ACM Trans. Graph. TOG 2020, 39, 86:1–86:15. [Google Scholar] [CrossRef]
- Li, T.; Slavcheva, M.; Zollhoefer, M.; Green, S.; Lassner, C.; Kim, C.; Schmidt, T.; Lovegrave, S.; Goesele, M.; Newcombe, R.; et al. Neural 3d video synthesis from multi-view video. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]
- Park, K.; Sinha, U.; Barron, J.T.; Bouaziz, S.; Goldman, D.B.; Seitz, S.M.; Martin-Brualla, R. Nerfies: Deformable neural radiance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Karaev, N.; Rocco, I.; Graham, B.; Neverova, N.; Vedaldi, A.; Rupprecht, C. Dynamicstereo: Consistent dynamic depth from stereo videos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Palazzolo, E.; Behley, J.; Lottes, P.; Giguere, P.; Stachniss, C. ReFusion: 3D reconstruction in dynamic environments for RGB-D cameras exploiting residuals. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Yang, X.; Zhou, L.; Jiang, H.; Tang, Z.; Wang, Y.; Bao, H.; Zhang, G. Mobile3DRecon: Real-time monocular 3D reconstruction on a mobile phone. IEEE Trans. Vis. Comput. Graph. 2020, 26, 3446–3456. [Google Scholar] [CrossRef] [PubMed]
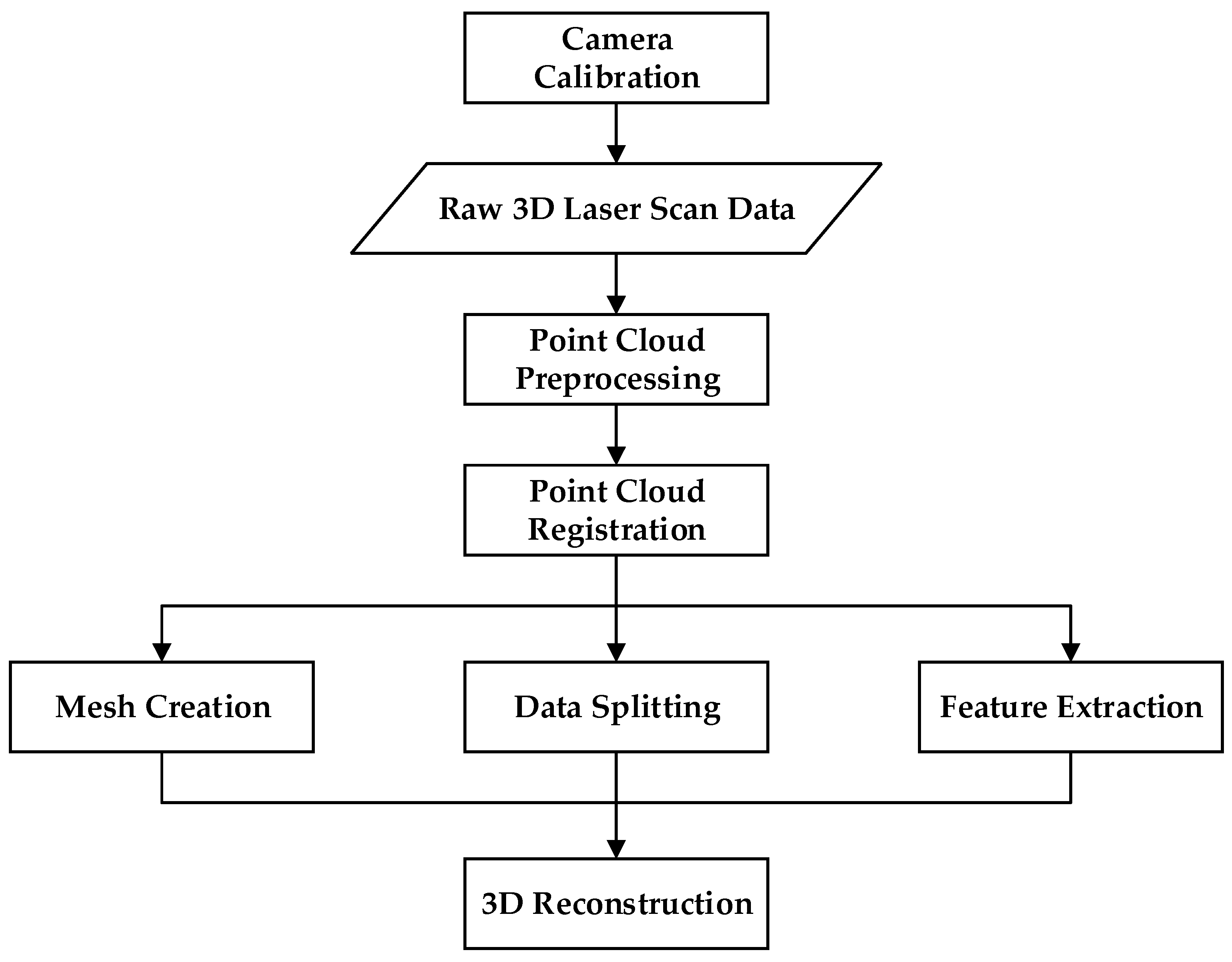
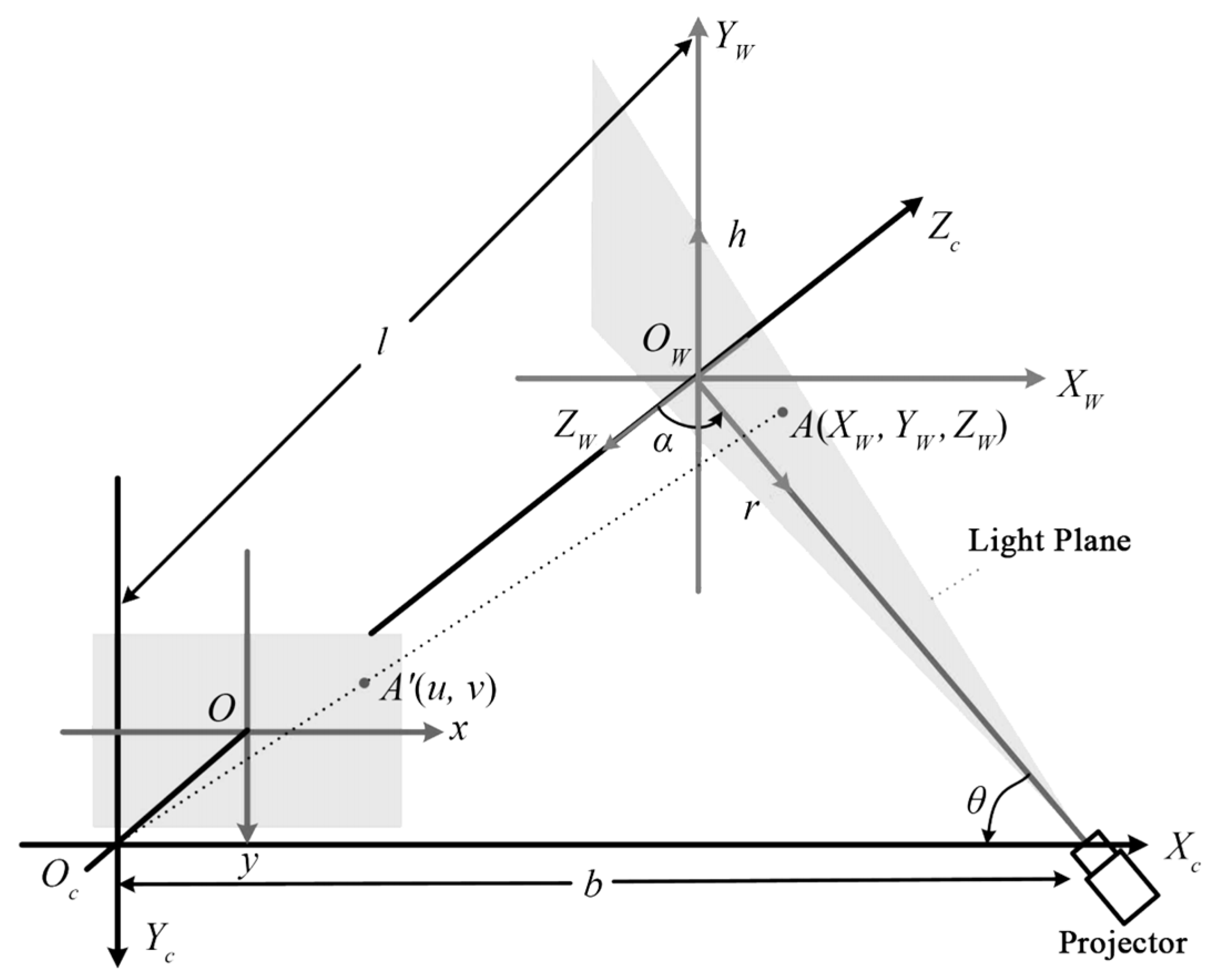
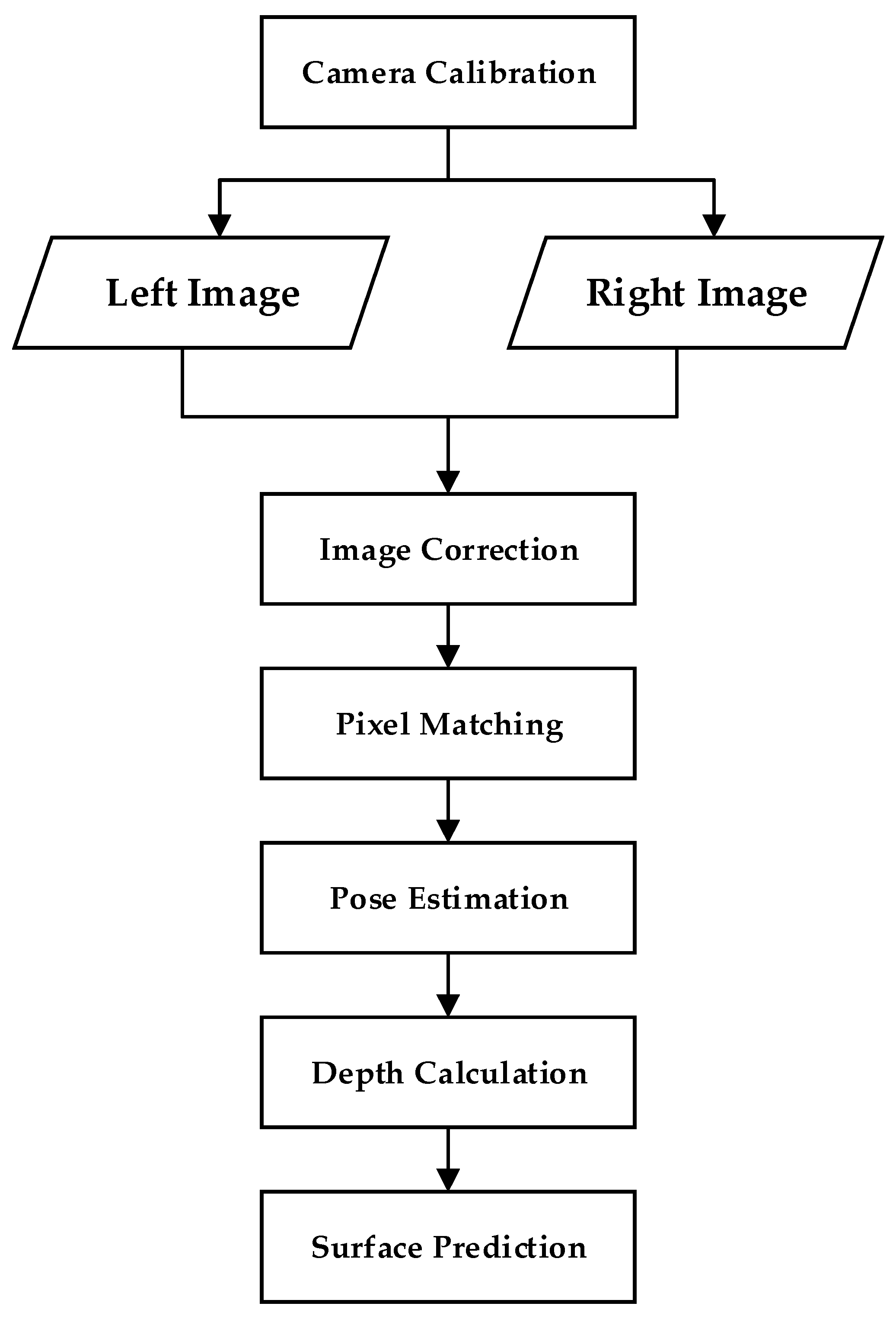
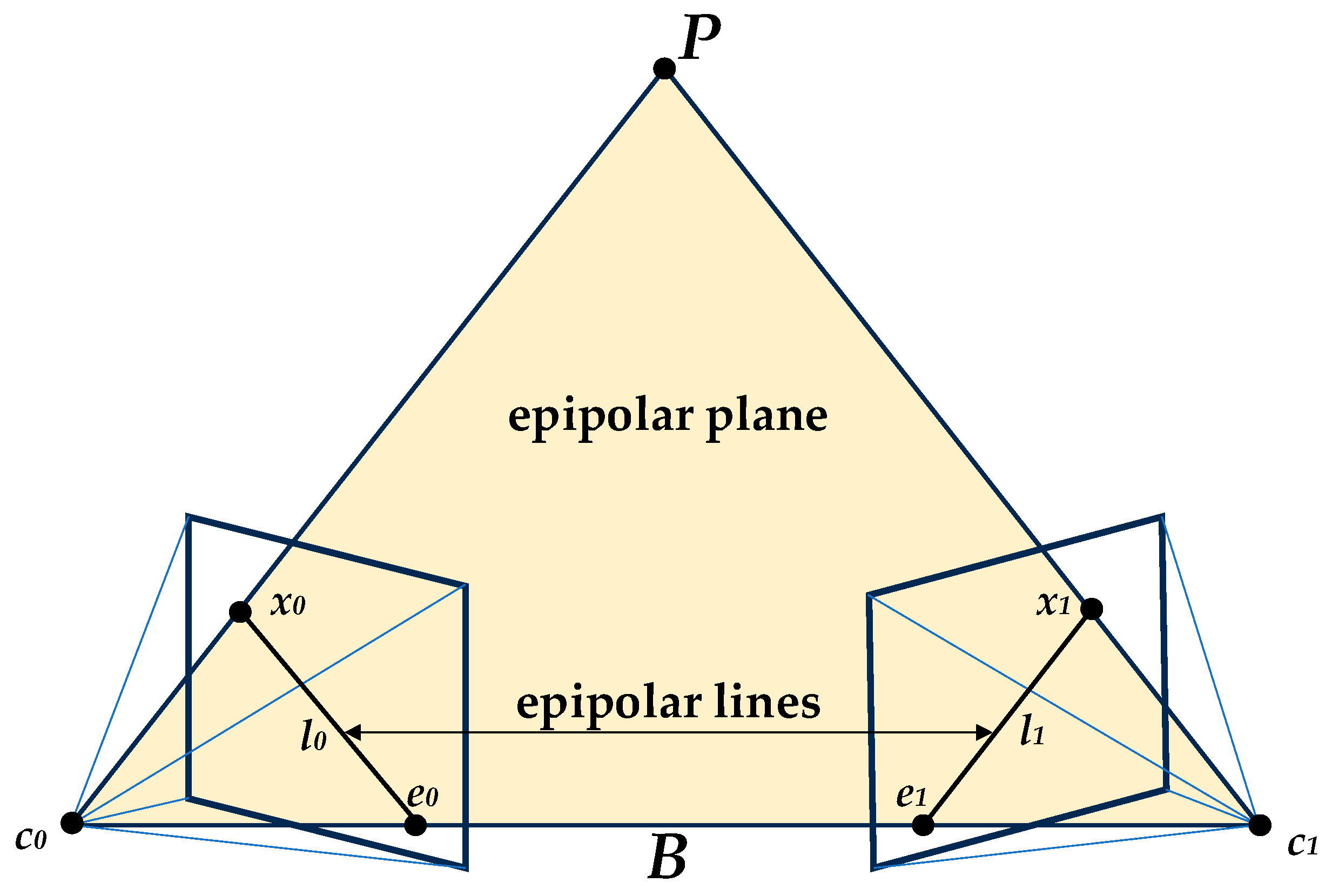
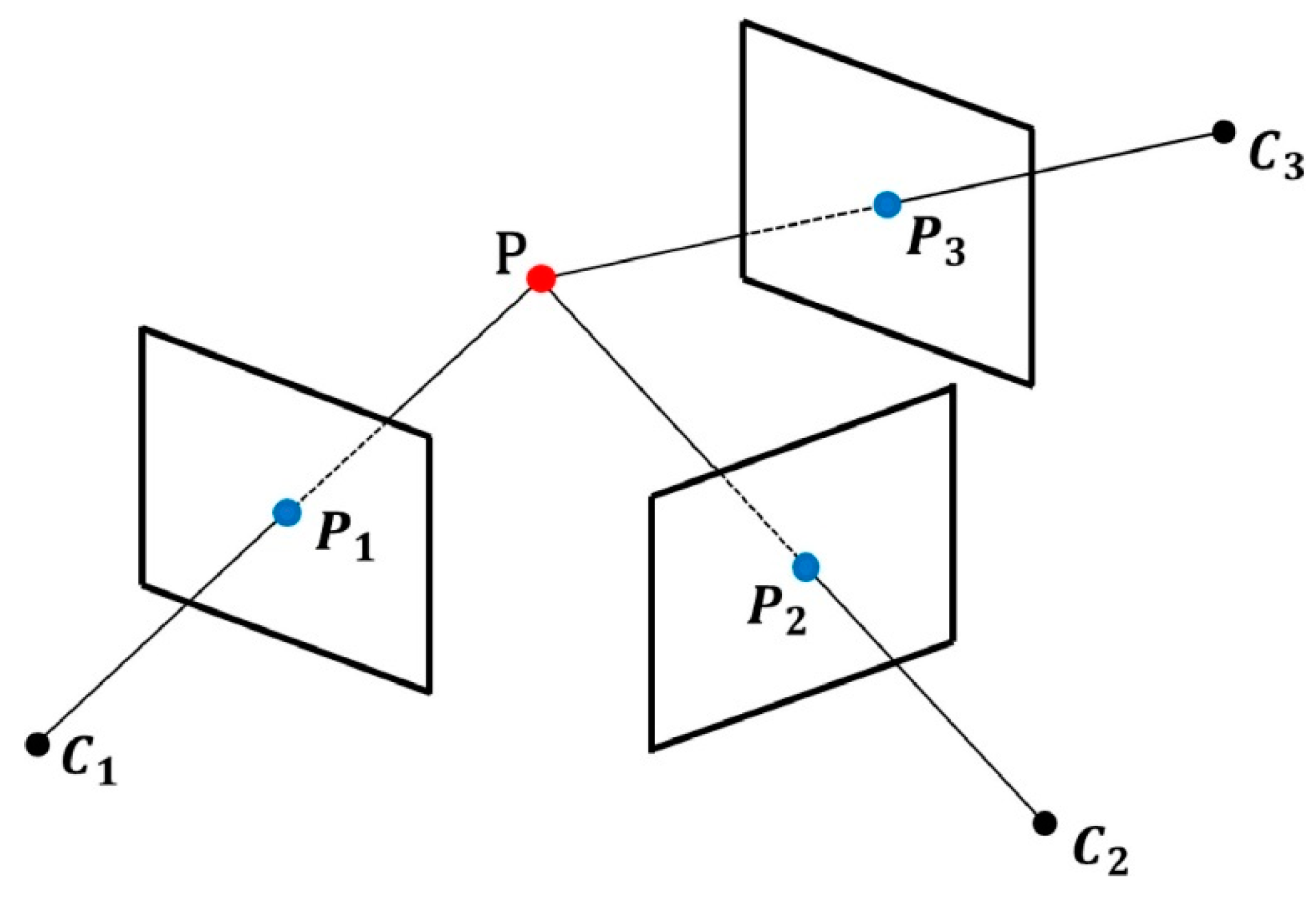
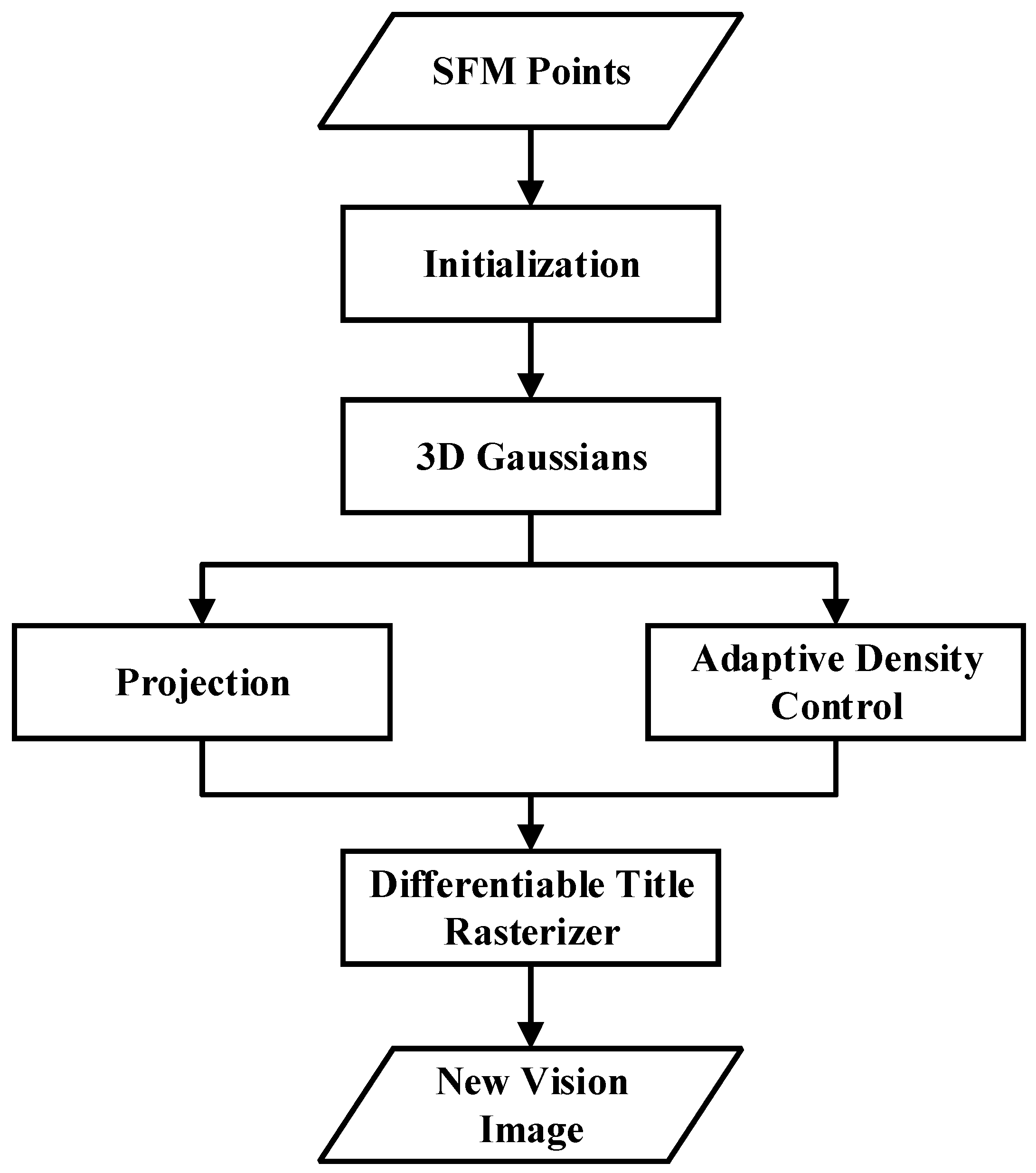
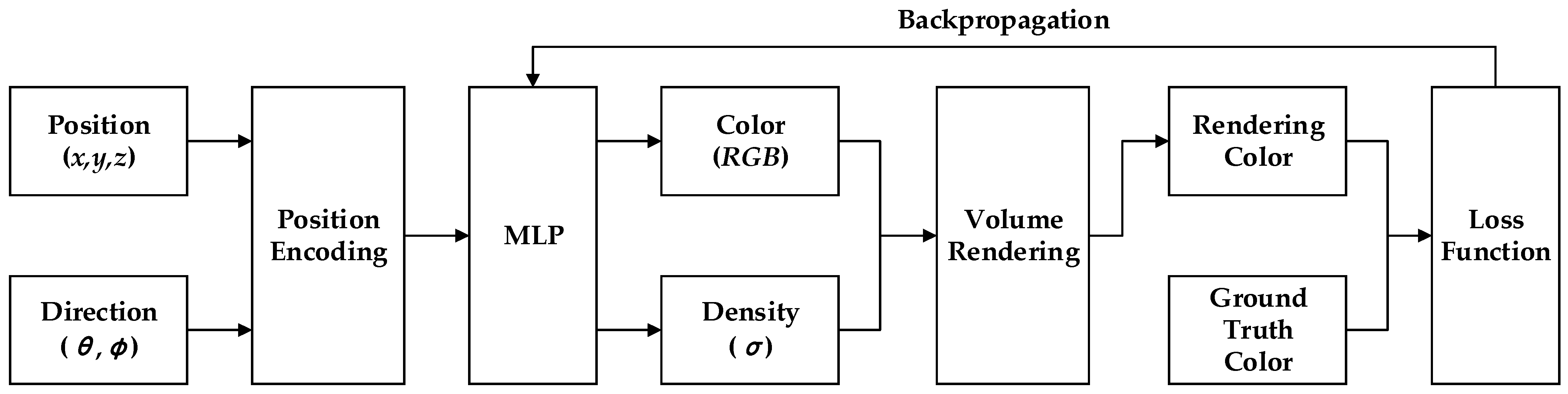
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).