





A Reduced Complexity Acoustic-Based 3D DoA Estimation with Zero Cyclic Sum



Abstract
1. Introduction
2. Related Work
2.1. Time-Delay Estimation Approaches
2.2. Beamforming Techniques
2.3. AI-Oriented DoA Estimation
2.4. Partial Conclusions
3. DoA Estimation Techniques
3.1. GCC-PHAT (Classic DOA Estimation)
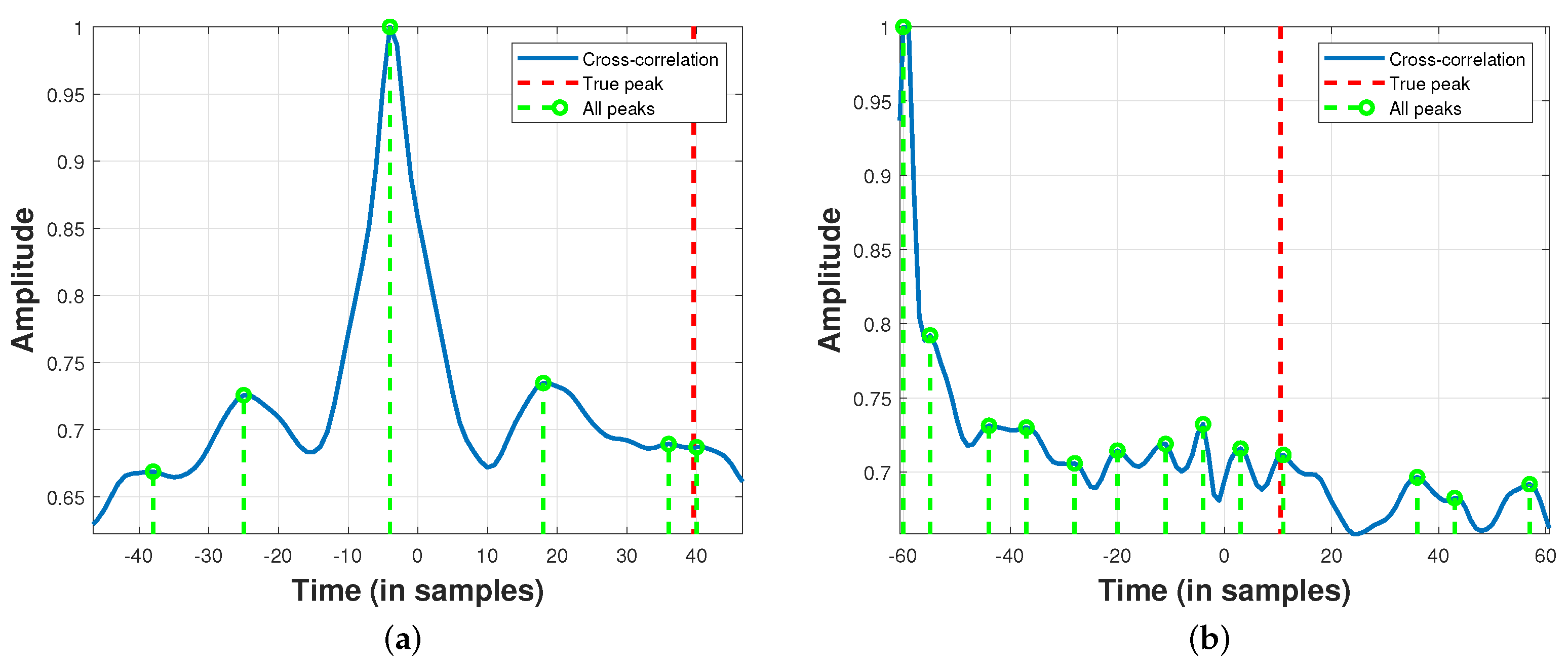
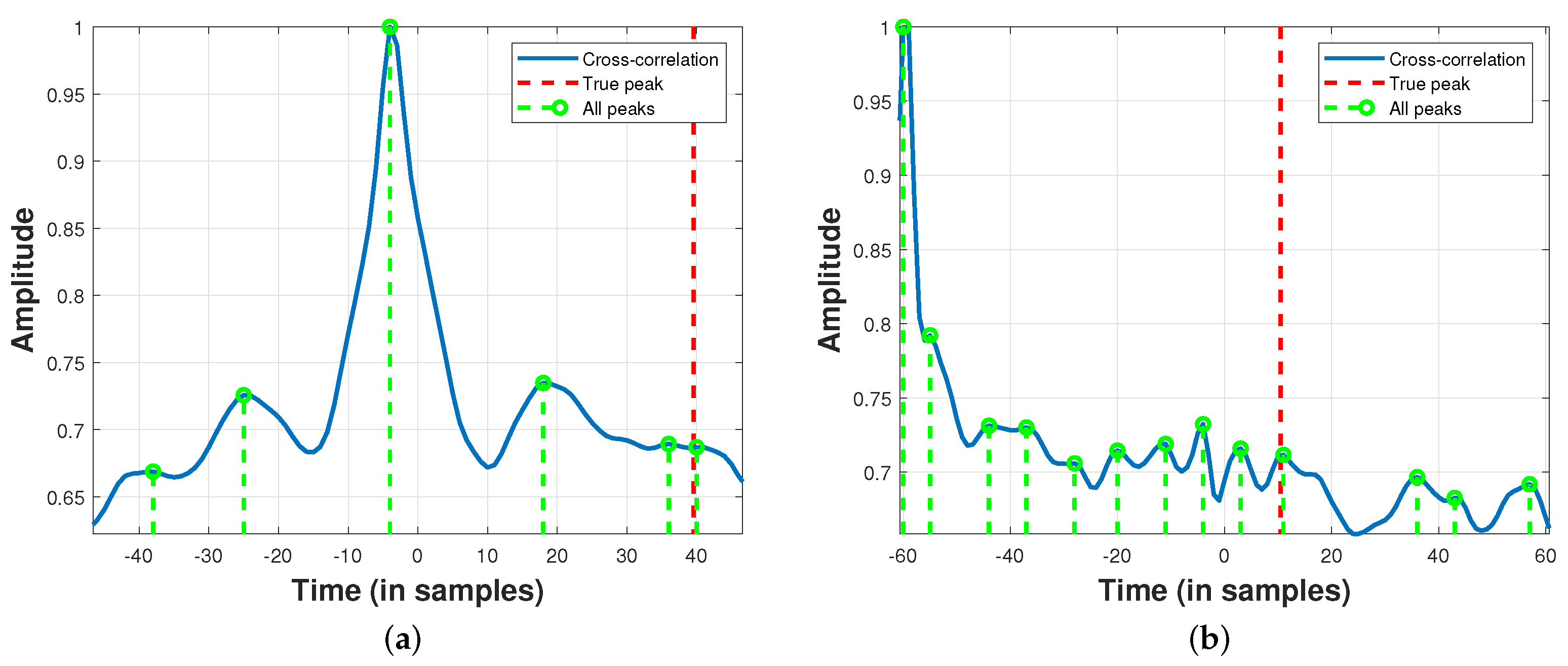
3.2. TDE Problem
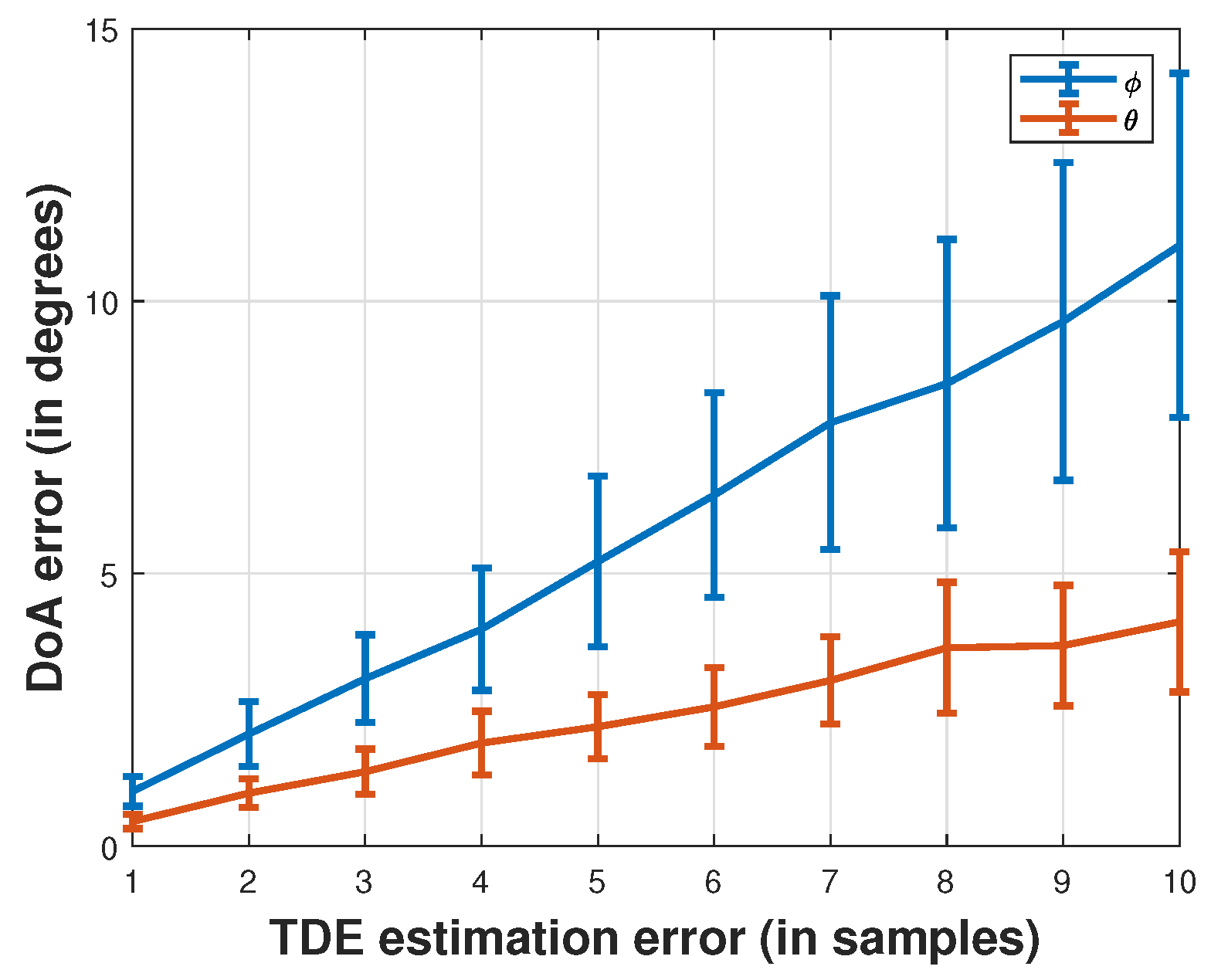
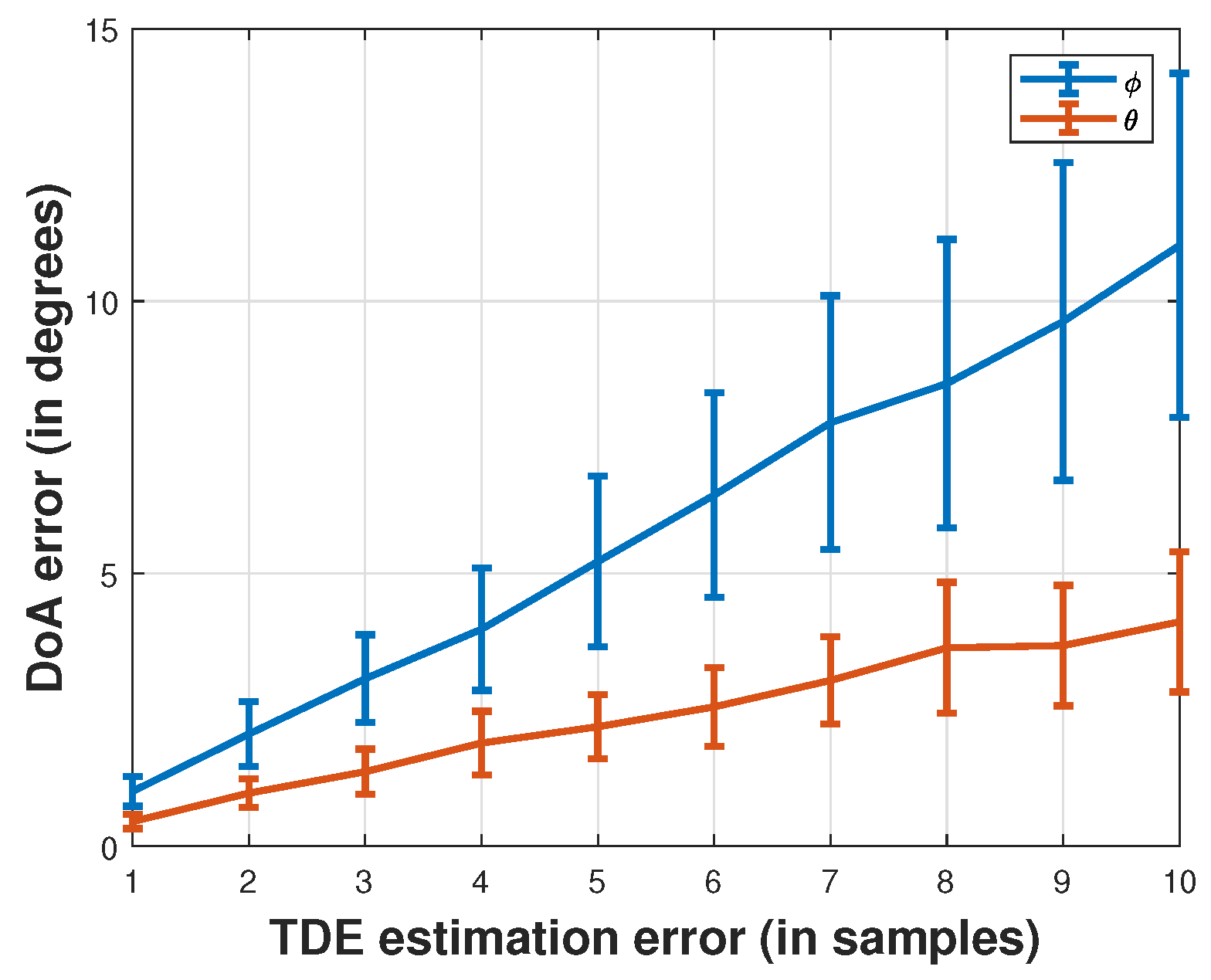
3.3. Impact of TDE Error in DoA Estimation
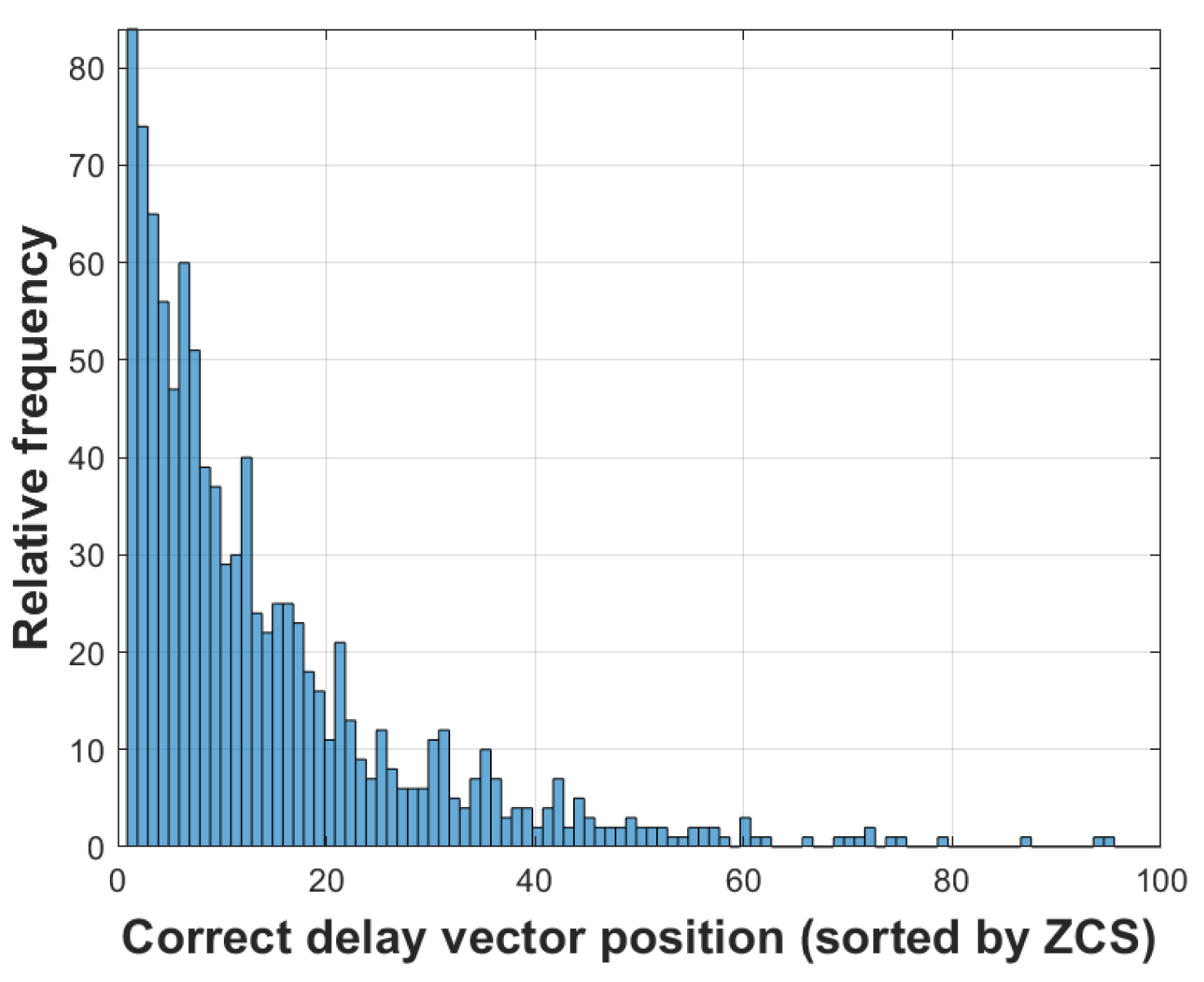
3.4. ZCS Condition
4. Dataset and Preprocessing
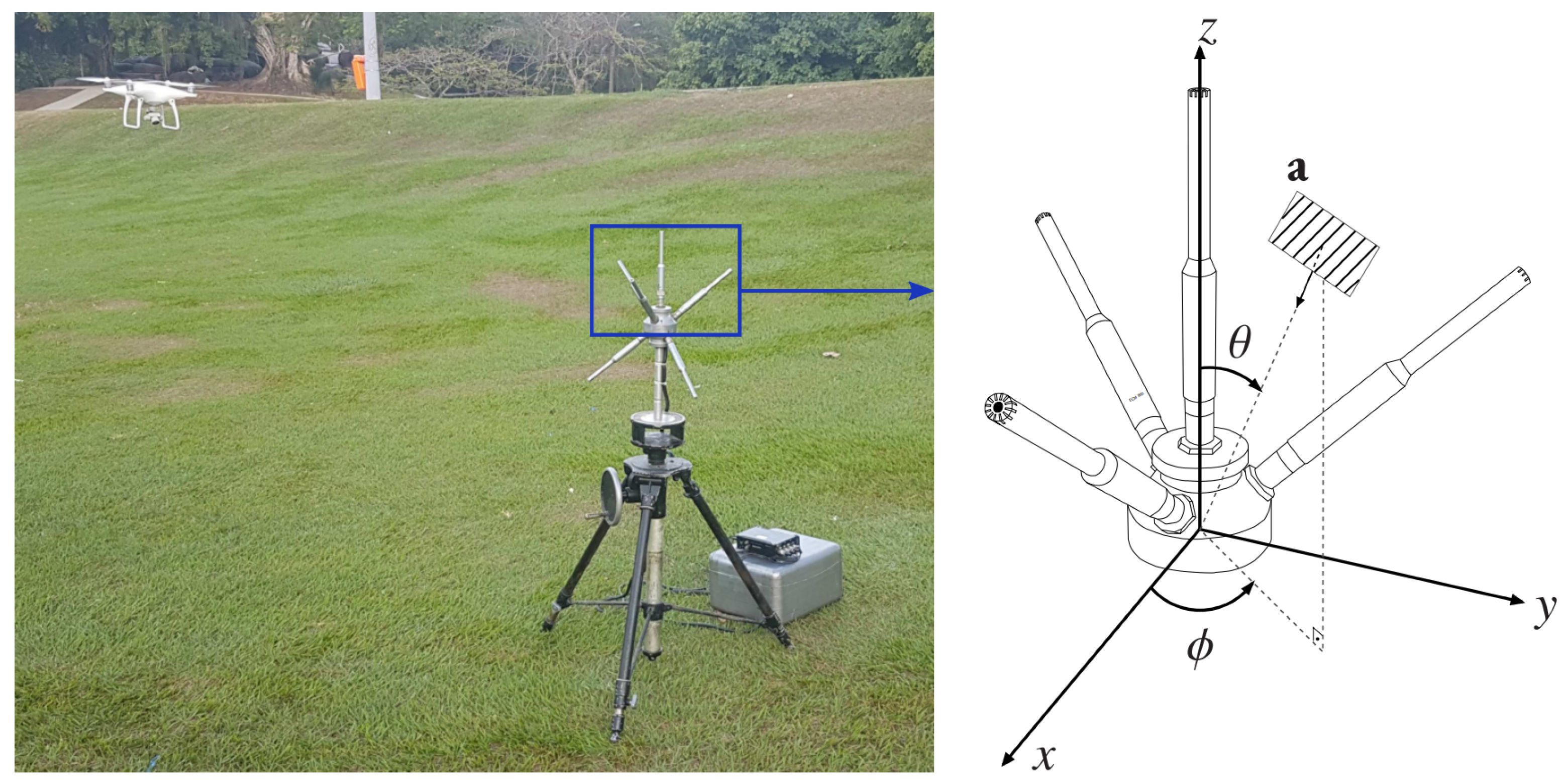
4.1. Data Acquisition
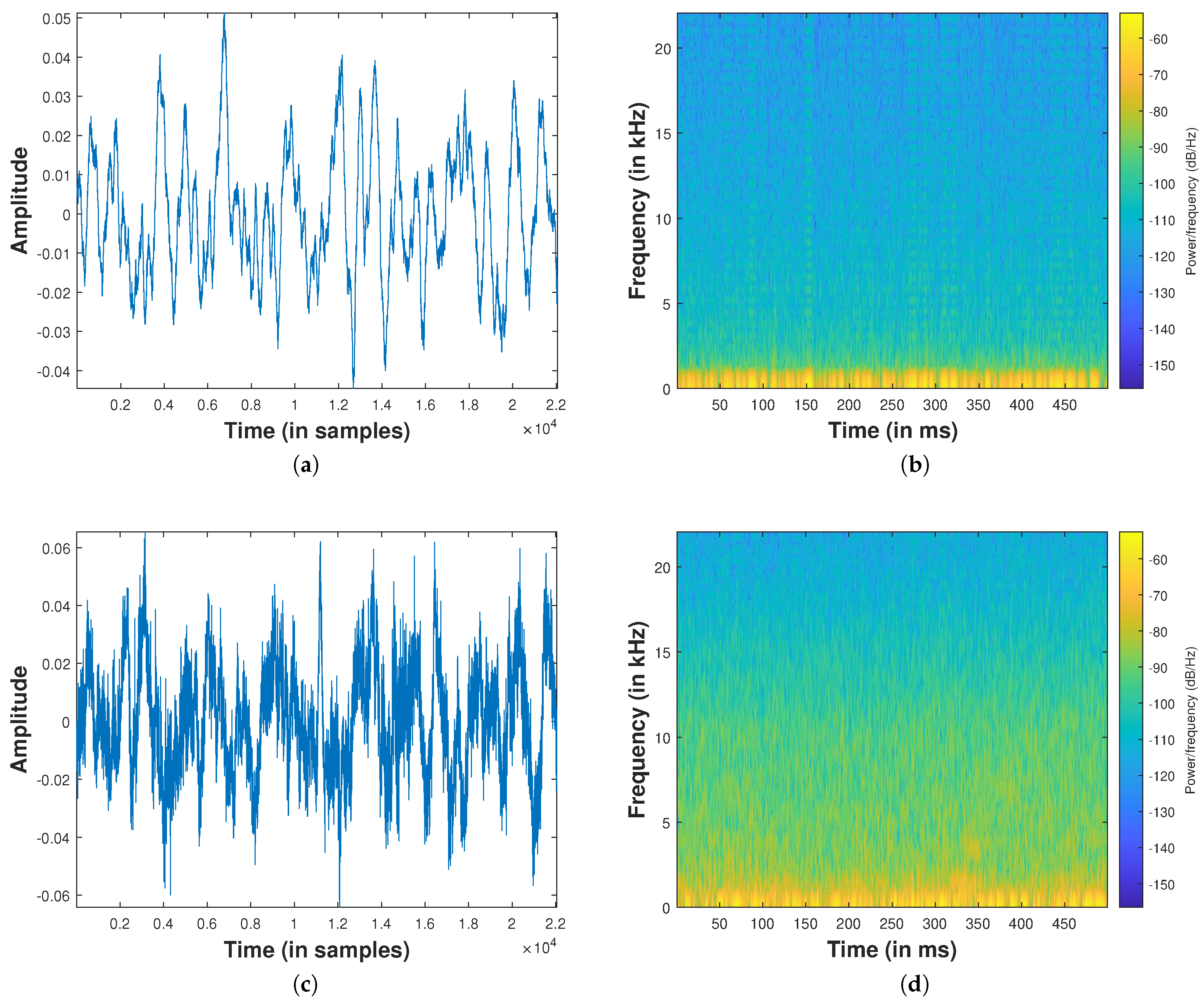
4.2. Acoustic Drone Noise Analysis
5. Proposed Method
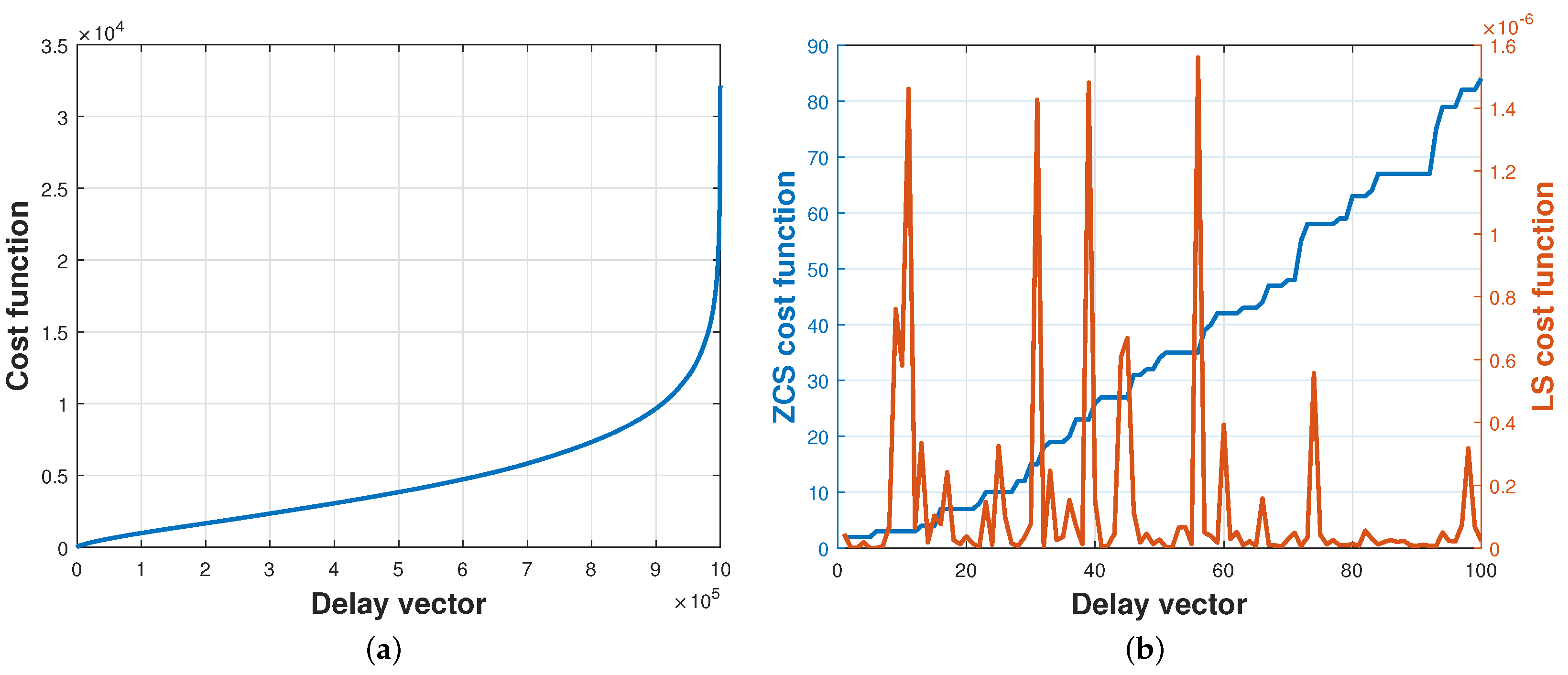
5.1. Exhaustive Search with ZCS
5.2. Least-Squares Cost Function
5.3. Summary
| Algorithm 1 Exhaustive search using ZCS and LS. |
|
6. Results
6.1. Effects of Signal Window Length
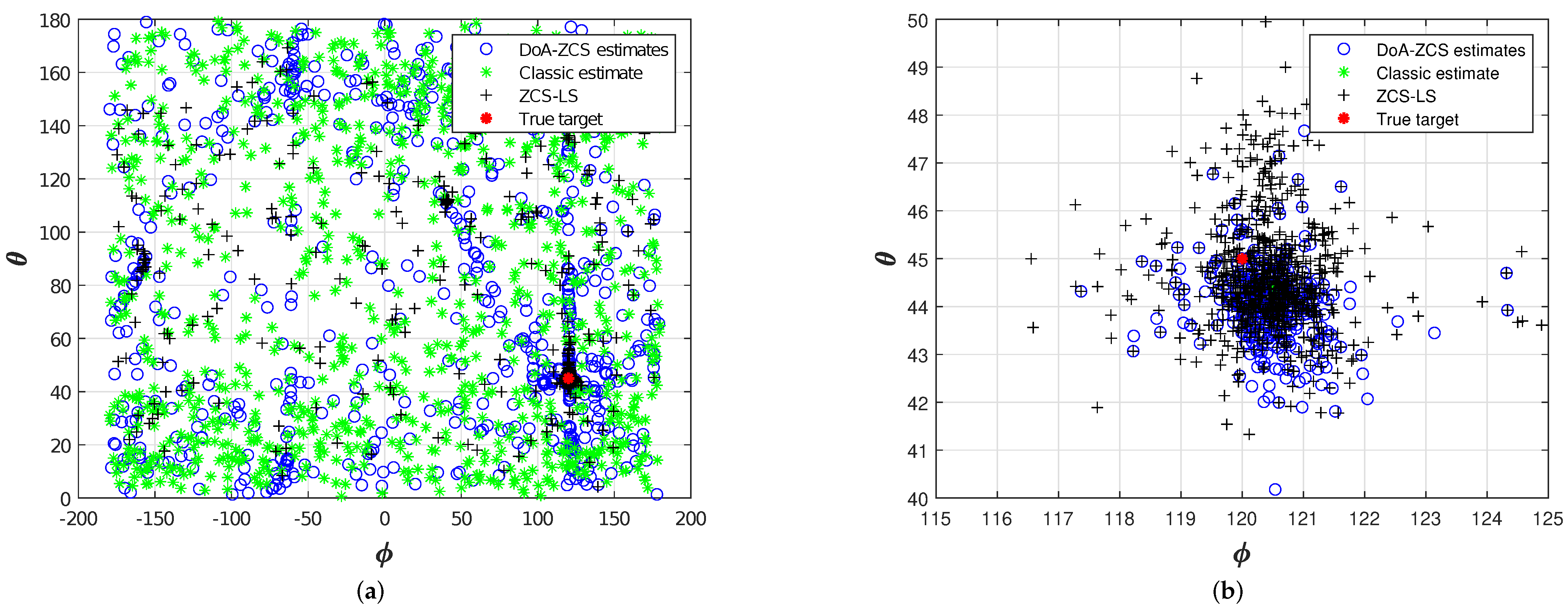
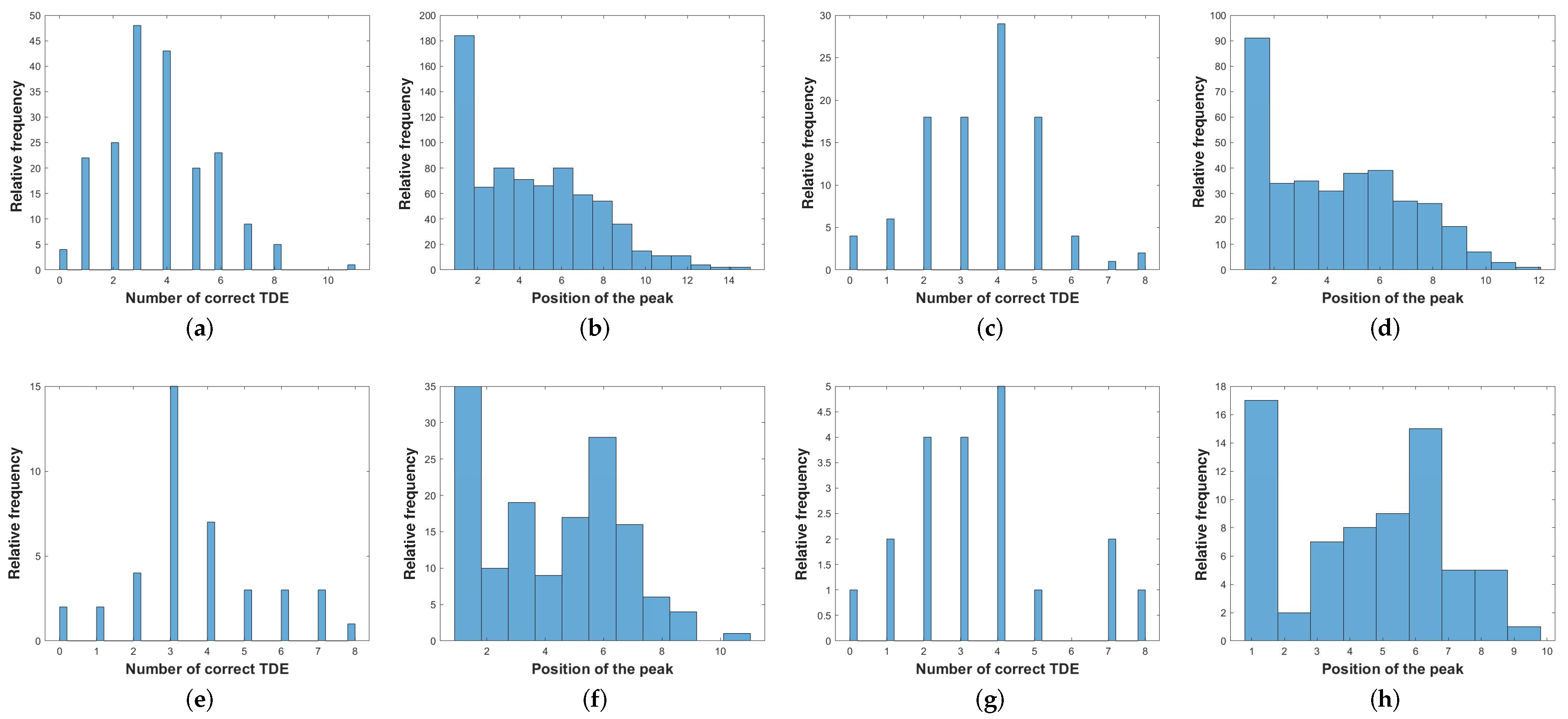
6.2. DoA Estimation with Simulated Data
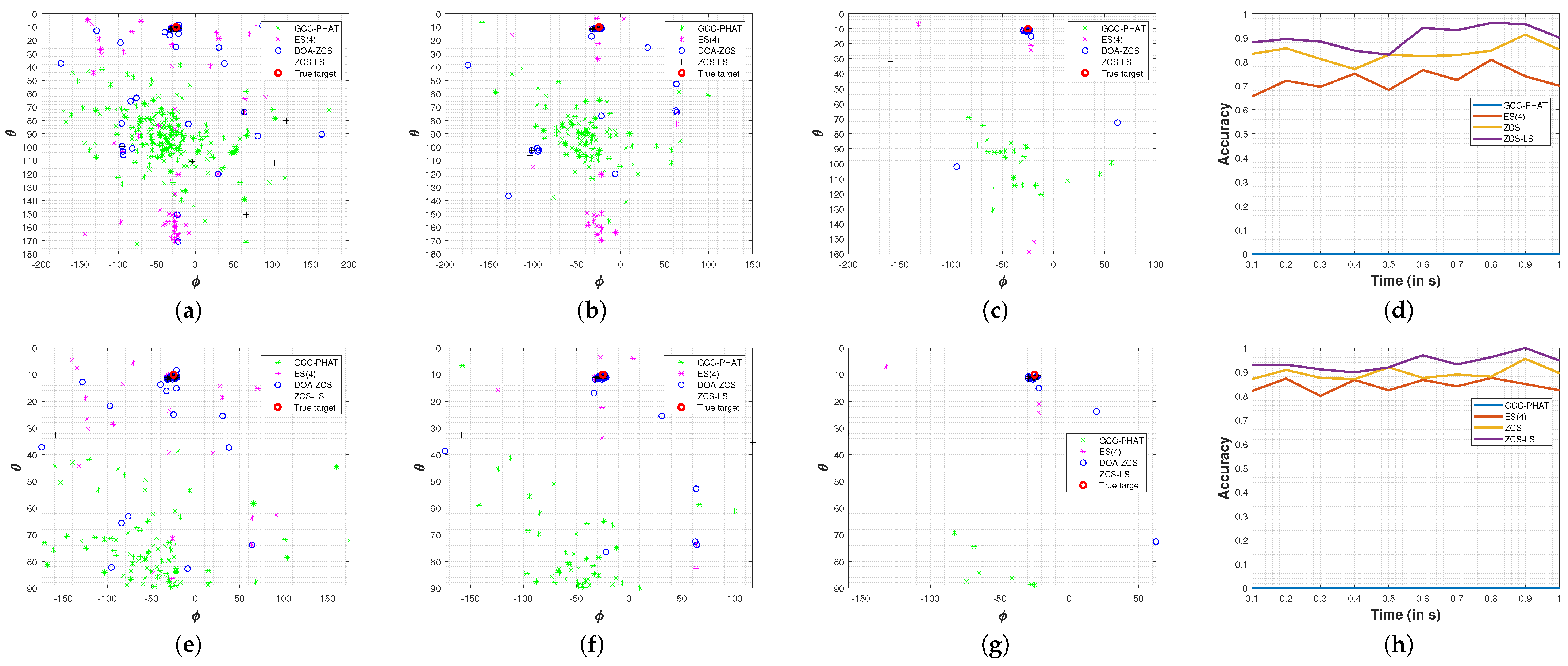
6.3. DoA Estimation with Experimental Data
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Isiaka, F. Performance Metrics of an Intrusion Detection System through Window Based Deep Learning Models. J. Data Sci. Intell. Syst. 2023. [Google Scholar] [CrossRef]
- Putri, R.K.; Athoillah, M. Detection of Facial Mask Using Deep Learning Classification Algorithm. J. Data Sci. Intell. Syst. 2024, 2, 194–199. [Google Scholar] [CrossRef]
- Chinthamu, N.; Karukuri, M. Data Science and Applications. J. Data Sci. Intell. Syst. 2023, 1, 83–91. [Google Scholar] [CrossRef]
- Serrenho, F.G.; Apolinário, J.A., Jr.; Ramos, A.L.L.; Fernandes, R.P. Gunshot airborne surveillance with rotary wing UAV-embedded microphone array. Sensors 2019, 19, 4271. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, R.P.; Apolinário, J.A., Jr.; de Seixas, J.M. Enhancing TDE-based drone DoA estimation with genetic algorithms and zero cyclic sum. In Proceedings of the XVI Brazilian Conference on Computational Intelligence, Salvador, Brazil, 11 October 2023. [Google Scholar] [CrossRef]
- Fuchs, J.; Gardill, M.; Lübke, M.; Dubey, A.; Lurz, F. A machine learning perspective on automotive radar direction of arrival estimation. IEEE Access 2022, 10, 6775–6797. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Giunta, G.; Pallotta, L. Improving Delay Estimation in Underwater Acoustic Applications by the Additional Use of Cross-Cross-Correlation. In Proceedings of the 97th IEEE Vehicular Technology Conference (VTC2023-Spring), Florence, Italy, 20–23 June 2023. [Google Scholar] [CrossRef]
- Fernandes, R.P.; Borzino, A.M.C.R.; Ramos, A.L.L.; Apolinário, J.A., Jr. Investigating the potential of UAV for gunshot DoA estimation and shooter localization. In Proceedings of the XXXIV Simpósio Brasileiro de Telecomunicações e Processamento de Sinais (SBrT), Santarém, Brazil, 30 August–2 September 2016; pp. 383–387. [Google Scholar] [CrossRef]
- Zhou, Y.; Hu, J.; Jiao, Y. Multi-target Ranging and Simulation Analysis Based on Cross Correlation. In Proceedings of the International Conference on Electrical, Control and Information Technology (ECITech), Kunming, China, 25–27 March 2022; VDE: Frankfurt, Germany, 2022. [Google Scholar]
- Borzino, Â.M.C.R.; Apolinário, J.A., Jr.; de Campos, M.L.R. Consistent DOA estimation of heavily noisy gunshot signals using a microphone array. IET Radar Sonar Navig. 2016, 10, 1519–1527. [Google Scholar] [CrossRef]
- Bosworth, B.T.; Bernecky, W.R.; Nickila, J.D.; Adal, B.; Carter, G.C. Estimating signal-to-noise ratio (SNR). IEEE J. Ocean. Eng. 2008, 33, 414–418. [Google Scholar] [CrossRef]
- Daniel, J.; Kitić, S. Time domain velocity vector for retracing the multipath propagation. In Proceedings of the 45th IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 421–425. [Google Scholar] [CrossRef]
- Plinge, A.; Jacob, F.; Haeb-Umbach, R.; Fink, G.A. Acoustic microphone geometry calibration: An overview and experimental evaluation of state-of-the-art algorithms. IEEE Signal Process. Mag. 2016, 33, 14–29. [Google Scholar] [CrossRef]
- Liaquat, M.U.; Munawar, H.S.; Rahman, A.; Qadir, Z.; Kouzani, A.Z.; Mahmud, M.P. Localization of sound sources: A systematic review. Energies 2021, 14, 3910. [Google Scholar] [CrossRef]
- Dehghan Firoozabadi, A.; Irarrazaval, P.; Adasme, P.; Zabala-Blanco, D.; Játiva, P.P.; Azurdia-Meza, C. 3D multiple sound source localization by proposed T-shaped circular distributed microphone arrays in combination with GEVD and adaptive GCC-PHAT/ML algorithms. Sensors 2022, 22, 1011. [Google Scholar] [CrossRef] [PubMed]
- Bu, S.; Zhao, T.; Zhao, Y. TDOA estimation of speech source in noisy reverberant environments. In Proceedings of the 2022 IEEE Spoken Language Technology Workshop (SLT), Doha, Qatar, 9–12 January 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1059–1066. [Google Scholar] [CrossRef]
- Freire, I.L.; Apolinário, J., Jr. GCC-based DoA estimation of overlapping muzzleblast and shockwave components of gunshot signals. In Proceedings of the 2011 IEEE Second Latin American Symposium on Circuits and Systems (LASCAS), Bogota, Colombia, 23–25 February 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Calderon, D.M.P.; Apolinário, J.A., Jr. Shooter localization based on DoA estimation of gunshot signals and digital map information. IEEE Lat. Am. Trans. 2015, 13, 441–447. [Google Scholar] [CrossRef]
- Borzino, A.M.; Apolinário, J.A., Jr.; de Campos, M.L. Robust DOA estimation of heavily noisy gunshot signals. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, QLD, Australia, 19–24 April 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 449–453. [Google Scholar] [CrossRef]
- Fernandes, R.P.; Apolinário, J.A., Jr.; Ramos, A.L. Bearings-only aerial shooter localization using a microphone array mounted on a drone. In Proceedings of the 2017 IEEE 8th Latin American Symposium on Circuits & Systems (LASCAS), Bariloche, Argentina, 20–23 February 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Fernandes, R.P.; Ramos, A.L.; Apolinário, J.A., Jr. Airborne DoA estimation of gunshot acoustic signals using drones with application to sniper localization systems. In Proceedings of the Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security, Defense, and Law Enforcement Applications XVI, Anaheim, CA, USA, 9–13 April 2017; SPIE: Bellingham, WA USA, 2017; Volume 10184, pp. 51–57. [Google Scholar] [CrossRef]
- Shi, Z.; Chang, X.; Yang, C.; Wu, Z.; Wu, J. An acoustic-based surveillance system for amateur drones detection and localization. IEEE Trans. Veh. Technol. 2020, 69, 2731–2739. [Google Scholar] [CrossRef]
- Jensen, J.R.; Nielsen, J.K.; Heusdens, R.; Christensen, M.G. DOA estimation of audio sources in reverberant environments. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 176–180. [Google Scholar] [CrossRef]
- Drémeau, A.; Herzet, C. DOA estimation in structured phase-noisy environments. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 3176–3180. [Google Scholar] [CrossRef]
- Cui, X.; Yu, K.; Lu, S. Approximate closed-form TDOA-based estimator for acoustic direction finding via constrained optimization. IEEE Sens. J. 2018, 18, 3360–3371. [Google Scholar] [CrossRef]
- Evers, C.; Habets, E.A.; Gannot, S.; Naylor, P.A. DoA reliability for distributed acoustic tracking. IEEE Signal Process. Lett. 2018, 25, 1320–1324. [Google Scholar] [CrossRef]
- Licitra, G.; Artuso, F.; Bernardini, M.; Moro, A.; Fidecaro, F.; Fredianelli, L. Acoustic Beamforming Algorithms and Their Applications in Environmental Noise. Curr. Pollut. Rep. 2023, 9, 486–509. [Google Scholar] [CrossRef]
- Ramos, A.L.; Holm, S.; Gudvangen, S.; Otterlei, R. Delay-and-sum beamforming for direction of arrival estimation applied to gunshot acoustics. In Proceedings of the Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense X, Orlando, FL, USA, 25–29 April 2011; SPIE: Bellingham, WA USA, 2011; Volume 8019, pp. 162–170. [Google Scholar] [CrossRef]
- Chiariotti, P.; Martarelli, M.; Castellini, P. Acoustic beamforming for noise source localization—Reviews, methodology and applications. Mech. Syst. Signal Process. 2019, 120, 422–448. [Google Scholar] [CrossRef]
- Yang, Y.; Chu, Z.; Shen, L.; Xu, Z. Functional delay and sum beamforming for three-dimensional acoustic source identification with solid spherical arrays. J. Sound Vib. 2016, 373, 340–359. [Google Scholar] [CrossRef]
- Lee, J.Y.; Hudson, R.E.; Yao, K. Acoustic DOA estimation: An approximate maximum likelihood approach. IEEE Syst. J. 2013, 8, 131–141. [Google Scholar] [CrossRef]
- Huang, G.; Chen, J.; Benesty, J. Direction-of-arrival estimation of passive acoustic sources in reverberant environments based on the Householder transformation. J. Acoust. Soc. Am. 2015, 138, 3053–3060. [Google Scholar] [CrossRef]
- Wajid, M.; Kumar, A.; Bahl, R. Direction-of-arrival estimation algorithms using single acoustic vector-sensor. In Proceedings of the 2017 International Conference on Multimedia, Signal Processing and Communication Technologies (IMPACT), Aligarh, India, 24–26 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 84–88. [Google Scholar] [CrossRef]
- Kotus, J.; Szwoch, G. Calibration of acoustic vector sensor based on MEMS microphones for DOA estimation. Appl. Acoust. 2018, 141, 307–321. [Google Scholar] [CrossRef]
- Hu, Y.; Lu, J.; Qiu, X. Direction of arrival estimation of multiple acoustic sources using a maximum likelihood method in the spherical harmonic domain. Appl. Acoust. 2018, 135, 85–90. [Google Scholar] [CrossRef]
- Al Kassir, H.; Zaharis, Z.D.; Lazaridis, P.I.; Kantartzis, N.V.; Yioultsis, T.V.; Xenos, T.D. A review of the state-of-the-art and future challenges of deep learning-based beamforming. IEEE Access 2022, 10, 80869–80882. [Google Scholar] [CrossRef]
- Wang, Z.Q.; Zhang, X.; Wang, D. Robust TDOA Estimation Based on Time-Frequency Masking and Deep Neural Networks. In Proceedings of the Interspeech, Hyderabad, India, 2–6 September 2018; pp. 322–326. [Google Scholar] [CrossRef]
- Xiao, Y.; Fan, Z.; Chen, J.; Xu, J.; Shui, Y.; Zhou, J.; Bu, H. High-resolution acoustic beamforming based on genetic algorithms. Mech. Syst. Signal Process. 2023, 204, 110840. [Google Scholar] [CrossRef]
- Kyritsis, A.; Makri, R.; Uzunoglu, N. Small UAS Online Audio DOA Estimation and Real-Time Identification Using Machine Learning. Sensors 2022, 22, 8659. [Google Scholar] [CrossRef] [PubMed]
- Xiao, X.; Zhao, S.; Zhong, X.; Jones, D.L.; Chng, E.S.; Li, H. A learning-based approach to direction of arrival estimation in noisy and reverberant environments. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, QLD, Australia, 19–24 April 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2814–2818. [Google Scholar] [CrossRef]
- Chakrabarty, S.; Habets, E.A. Broadband DOA estimation using convolutional neural networks trained with noise signals. In Proceedings of the 2017 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 15–18 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 136–140. [Google Scholar] [CrossRef]
- Hall, M. A combinatorial problem on abelian groups. Proc. Am. Math. Soc. 1952, 3, 584–587. [Google Scholar] [CrossRef]
- Marsano-Cornejo, M.J.; Roco-Videla, Á. Comparison of the acoustic parameters obtained with different smartphones and a professional microphone. Acta Otorrinolaringol. (Engl. Ed.) 2022, 73, 51–55. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez Timaná, L.C.; Saavedra Lozano, D.F.; Díaz Velásquez, M.F.; Castillo García, J.F. Technical Feasibility for the Mobile Measurement of Noise Pollution by Remotely Piloted Aircraft System. In Proceedings of the International Conference on Applied Technologies, Quito, Ecuador, 3–5 December 2019; Springer: Cham, Switzerland, 2019; pp. 219–230. [Google Scholar] [CrossRef]
- Wang, L.; Cavallaro, A. Ear in the sky: Ego-noise reduction for auditory micro aerial vehicles. In Proceedings of the 13th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Colorado Springs, CO, USA, 23–26 August 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 152–158. [Google Scholar] [CrossRef]
- Wang, L.; Cavallaro, A. Acoustic sensing from a multi-rotor drone. IEEE Sens. J. 2018, 18, 4570–4582. [Google Scholar] [CrossRef]
- Mukhutdinov, D.; Alex, A.; Cavallaro, A.; Wang, L. Deep learning models for single-channel speech enhancement on drones. IEEE Access 2023, 11, 22993–23007. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # Delays | Closed Loops | |||
|---|---|---|---|---|
| 3 | ||||
| 4 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernandes, R.P.; Apolinário, J.A., Jr.; de Seixas, J.M. A Reduced Complexity Acoustic-Based 3D DoA Estimation with Zero Cyclic Sum. Sensors 2024, 24, 2344. https://doi.org/10.3390/s24072344
Fernandes RP, Apolinário JA Jr., de Seixas JM. A Reduced Complexity Acoustic-Based 3D DoA Estimation with Zero Cyclic Sum. Sensors. 2024; 24(7):2344. https://doi.org/10.3390/s24072344
Chicago/Turabian StyleFernandes, Rigel Procópio, José Antonio Apolinário, Jr., and José Manoel de Seixas. 2024. "A Reduced Complexity Acoustic-Based 3D DoA Estimation with Zero Cyclic Sum" Sensors 24, no. 7: 2344. https://doi.org/10.3390/s24072344
APA StyleFernandes, R. P., Apolinário, J. A., Jr., & de Seixas, J. M. (2024). A Reduced Complexity Acoustic-Based 3D DoA Estimation with Zero Cyclic Sum. Sensors, 24(7), 2344. https://doi.org/10.3390/s24072344