
A Transportable Atomic Gravimeter with Constraint-Structured Active Vibration Isolation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Apparatus
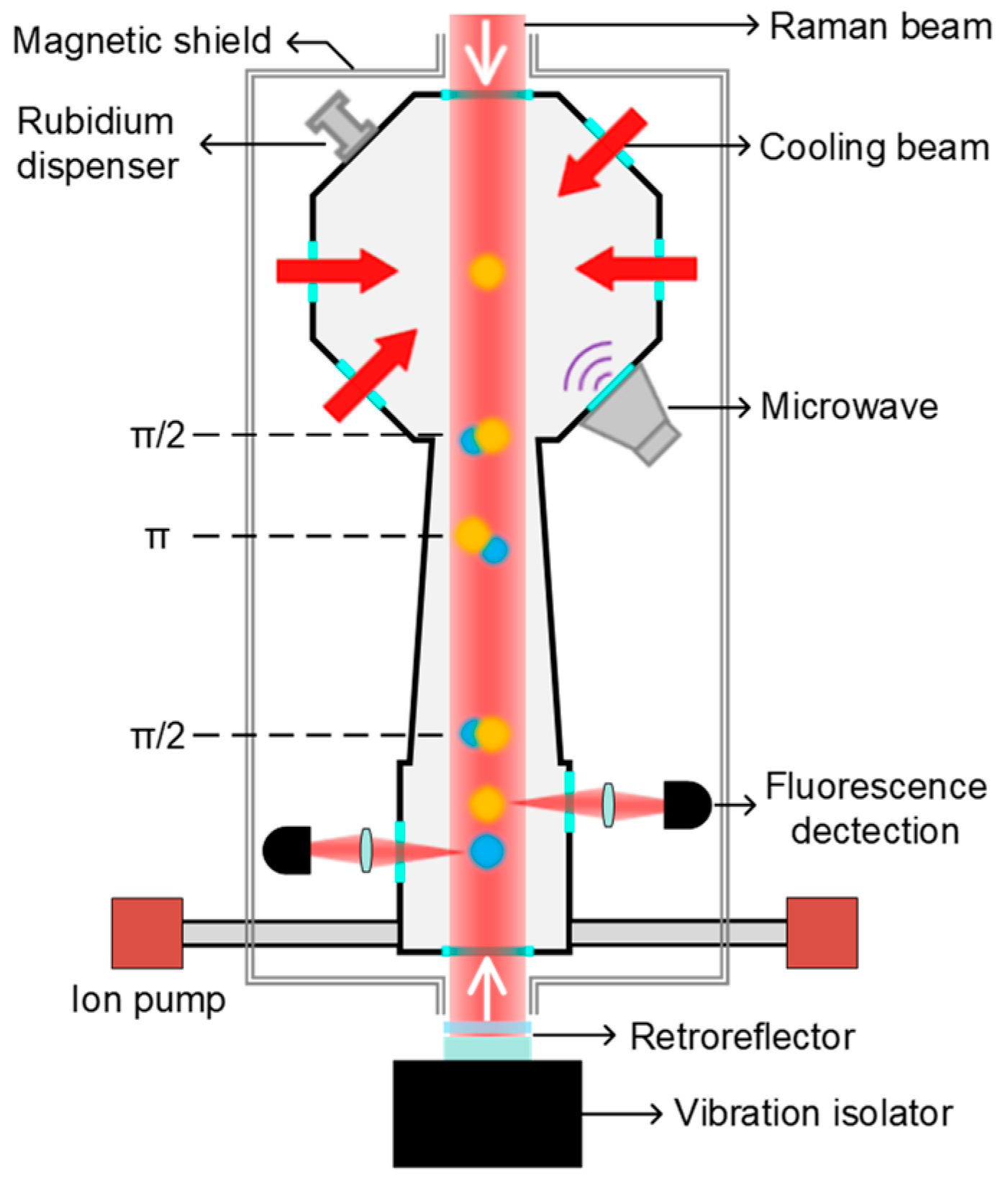
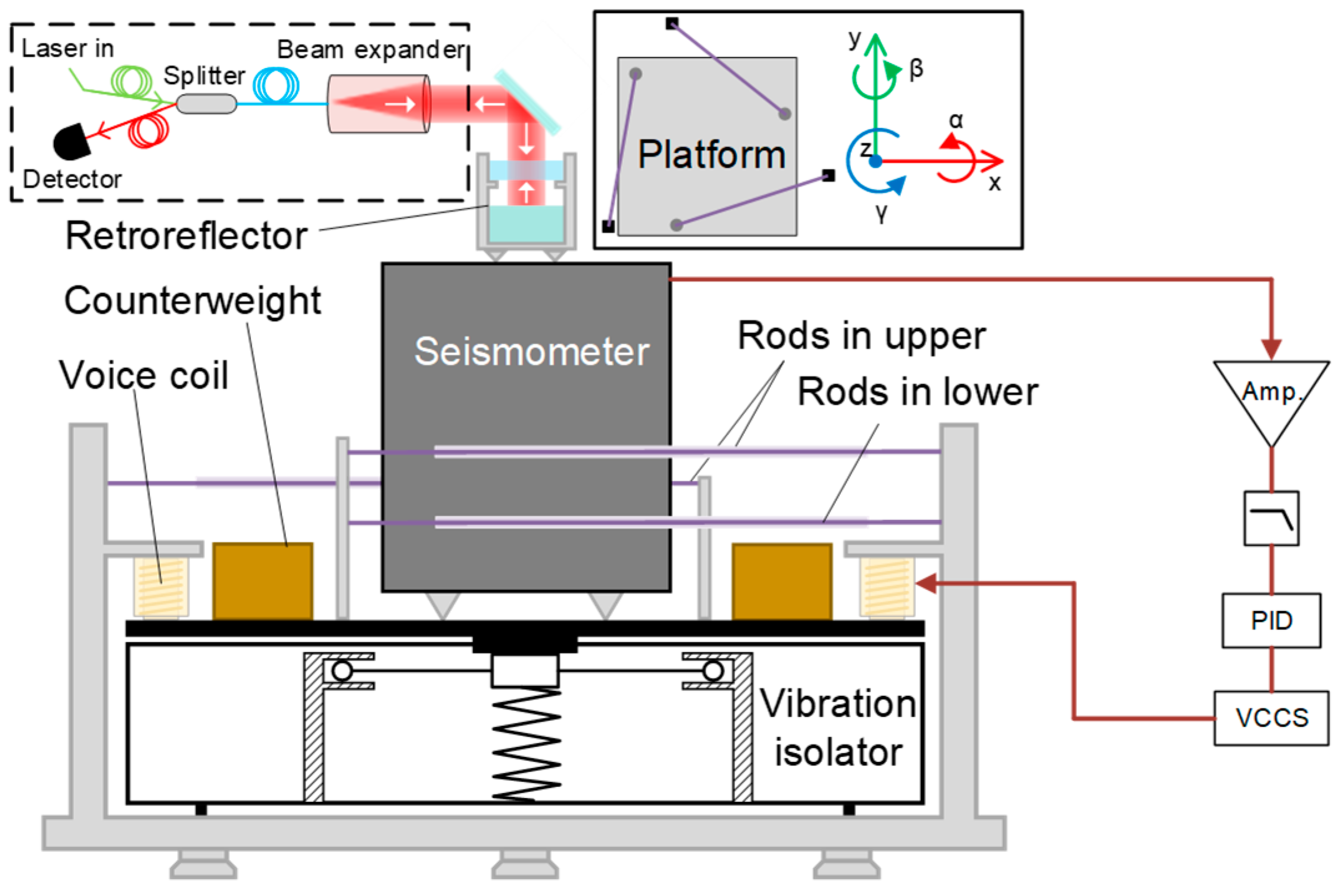
2.1. Experiment Setup
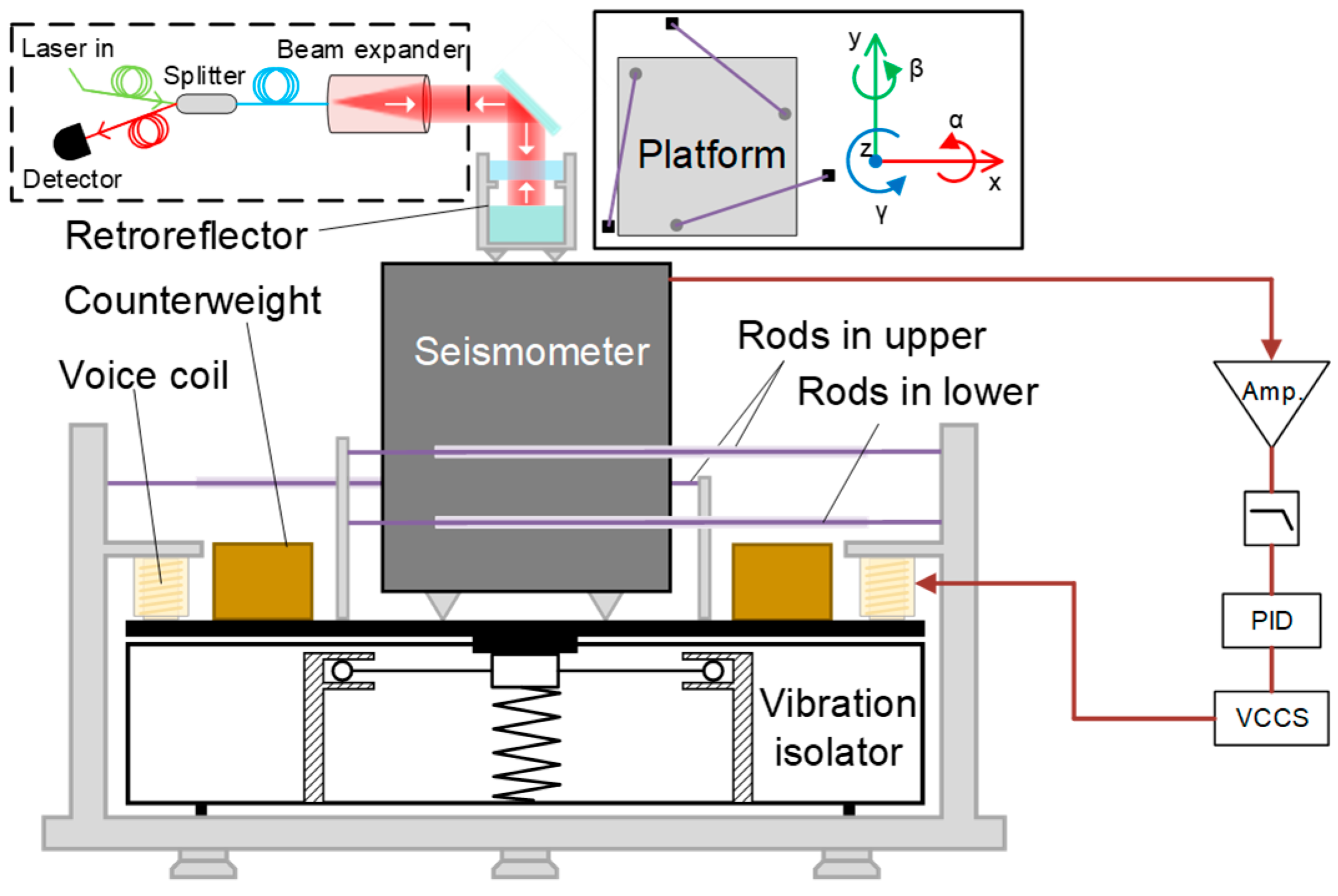
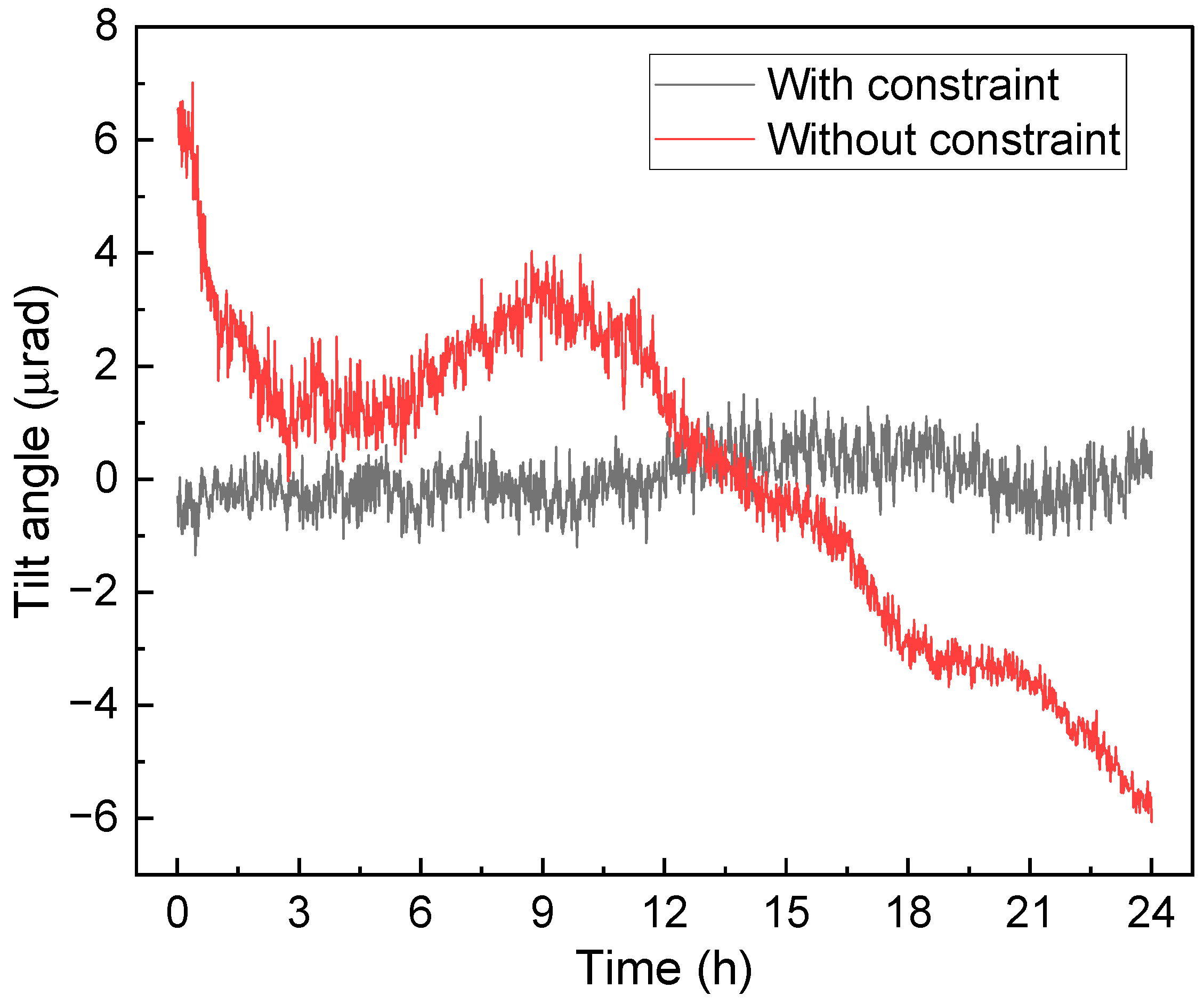
2.2. Constraint-Structured Active Vibration Isolation
3. Gravity Measurement
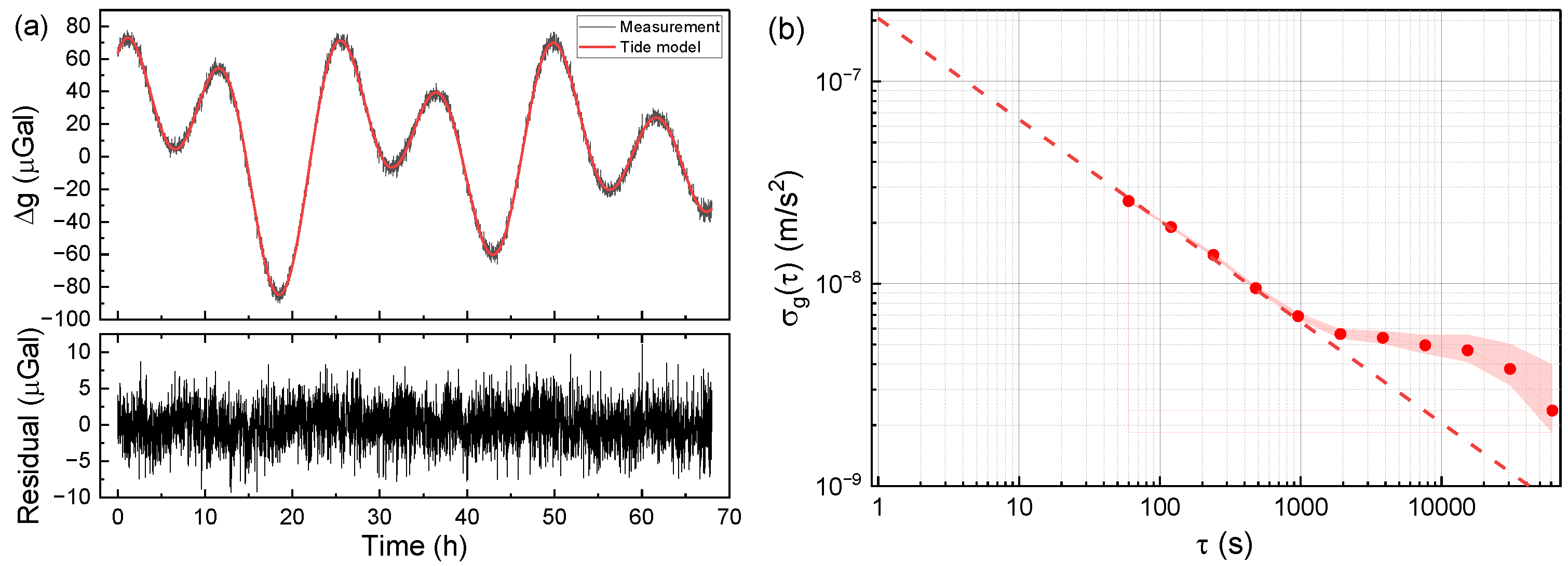
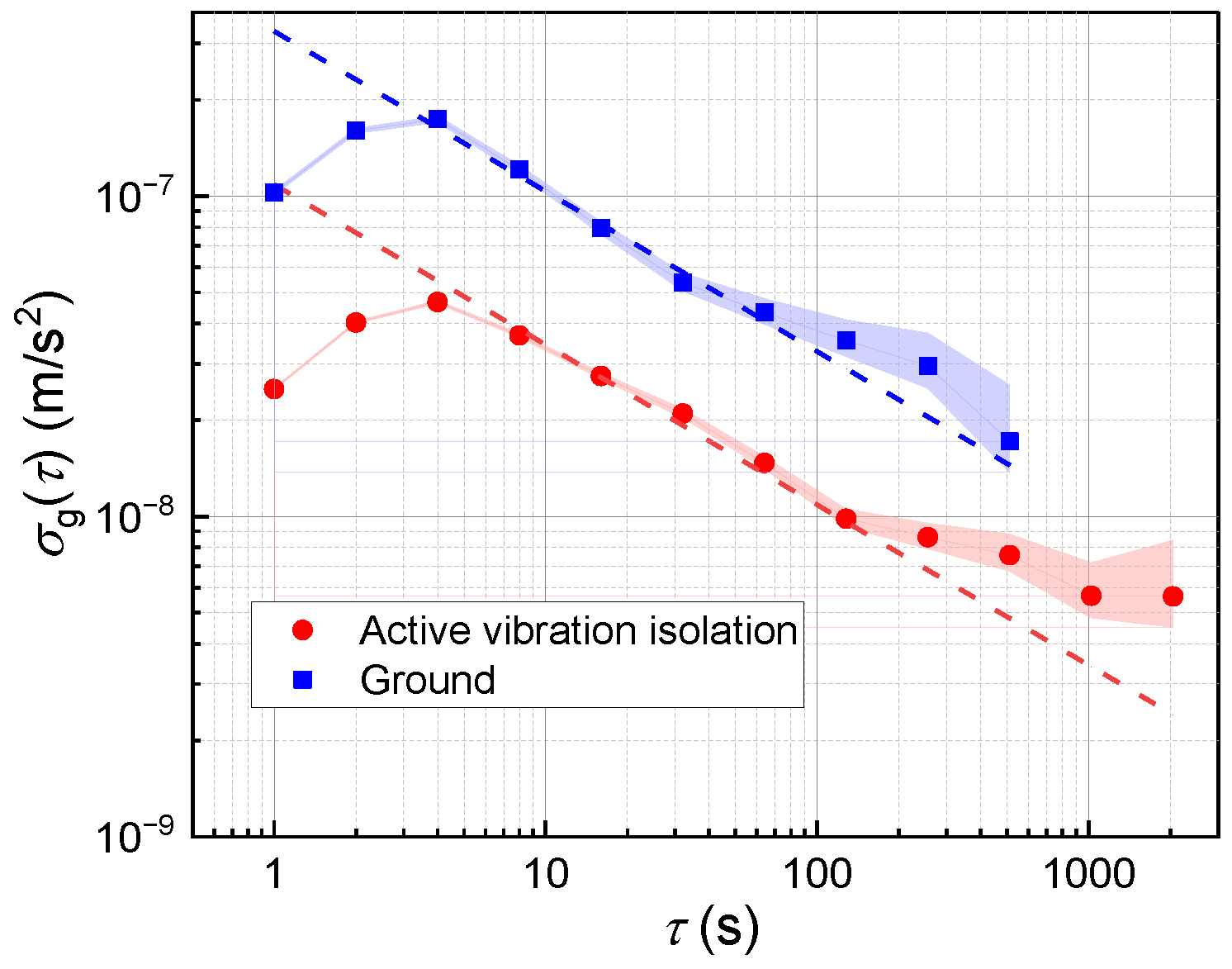
3.1. Laboratory Results
3.2. Transportation Test
4. Analysis for System Noises
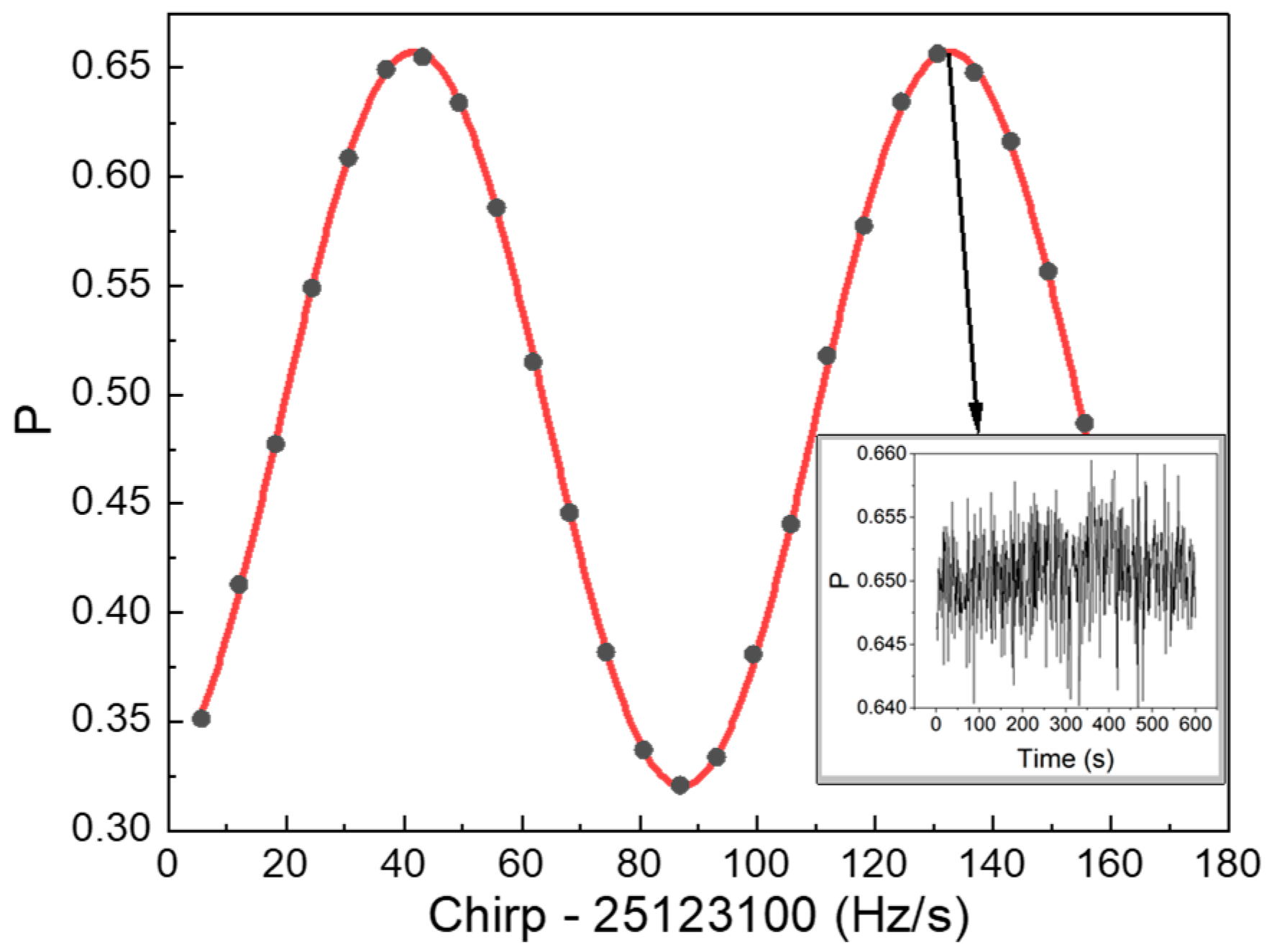
4.1. Fringe Amplitude Noise
4.2. Phase Noise of the Raman Laser
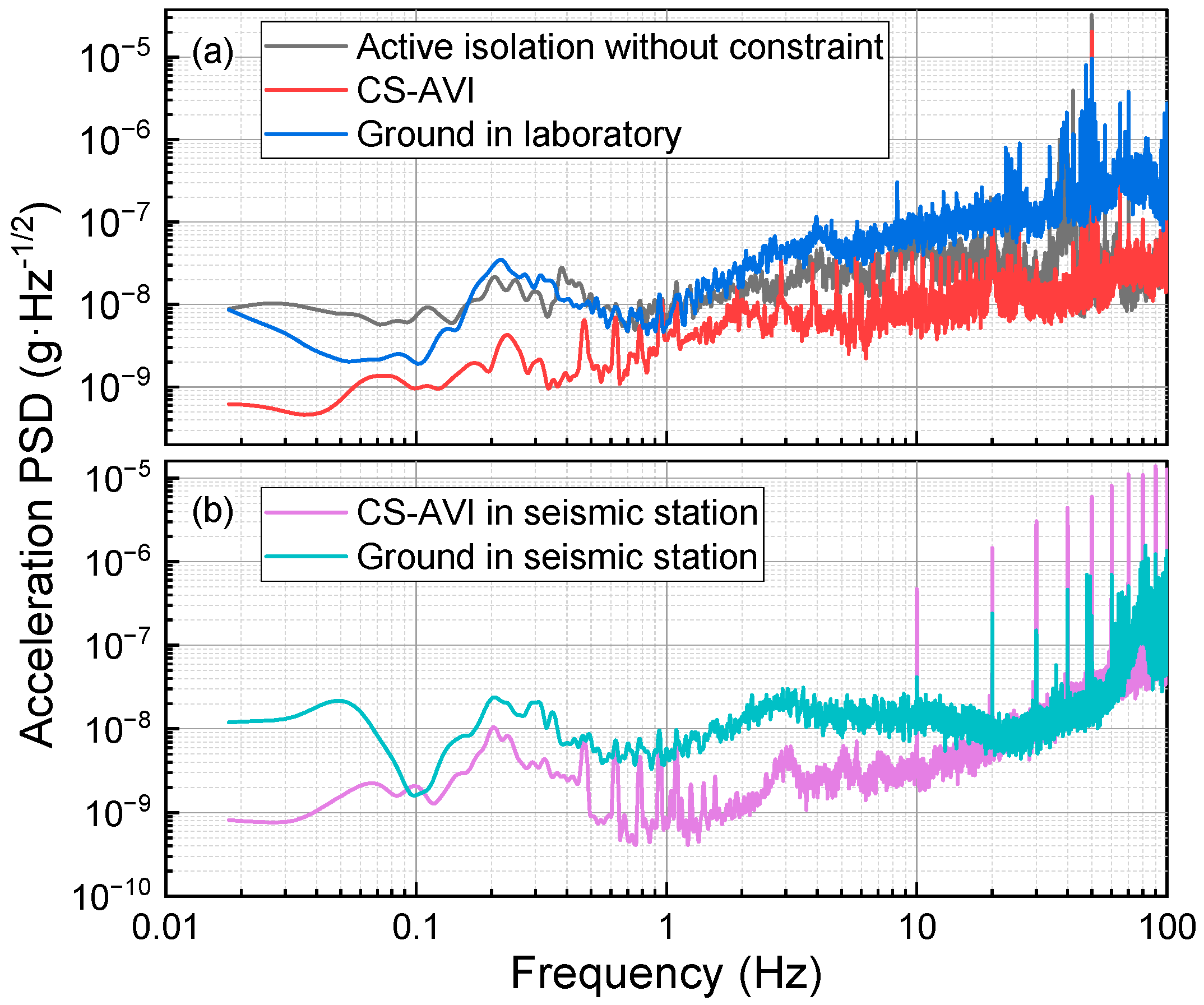
4.3. Vibration Noise
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, Z.; Sun, B.; Duan, X.; Zhou, M.; Chen, L.; Zhan, S.; Zhang, Q.; Luo, J. Demonstration of an ultrahigh-sensitivity atom-interferometry absolute gravimeter. Phys. Rev. A 2013, 88, 043610. [Google Scholar] [CrossRef]
- Gillot, P.; Francis, O.; Landragin, A.; Dos Santos, F.P.; Merlet, S. Stability Comparison of Two Absolute Gravimeters: Optical Versus Atomic Interferometers. Metrologia 2014, 51, L15. [Google Scholar] [CrossRef]
- Freier, C.; Hauth, M.; Schkolnik, V.; Leykauf, B.; Schilling, M.; Wziontek, H.; Scherneck, H.G.; Müller, J.; Peters, A. Mobile quantum gravity sensor with unprecedented stability. J. Phys. Conf. Ser. 2016, 723, 012050. [Google Scholar] [CrossRef]
- Müller, H.; Chiow, S.; Herrmann, S.; Chu, S.; Chung, K. Atom-Interferometry Tests of the Isotropy of Post-Newtonian Gravity. Phys. Rev. Lett. 2008, 100, 031101. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Zhao, Y.; Zhuang, W.; Li, T.; Wu, S.; Feng, J.; Li, C. Shift evaluation of the atomic gravimeter NIM-AGRb-1 and its comparison with FG5X. Metrologia 2018, 55, 360. [Google Scholar] [CrossRef]
- Huang, P.; Tang, B.; Chen, X.; Zhong, J.; Xiong, Z.; Zhou, L.; Wang, J.; Zhan, M. Accuracy and stability evaluation of the 85Rb atom gravimeter WAG-H5-1 at the 2017 International Comparison of Absolute Gravimeters. Metrologia 2019, 56, 045012. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, Q.; Wang, Z.; Wu, B.; Cheng, B.; Lin, Q. Participation in the absolute gravity comparison with a compact cold atom gravimeter. Chin. Opt. Lett. 2019, 17, 011204. [Google Scholar]
- Xie, H.; Chen, B.; Long, J.; Chun, X.; Chen, L.; Chen, S. Calibration of a compact absolute atomic gravimeter. Chin. Phys. B 2020, 29, 093701. [Google Scholar] [CrossRef]
- Kasevich, M.; Chu, S. Atomic interferometry using stimulated Raman transitions. Phys. Rev. Lett. 1991, 67, 181. [Google Scholar] [CrossRef]
- Bidel, Y.; Carraz, O.; Charrière, R.; Cadoret, M.; Zahzam, N.; Bresson, A. Compact cold atom gravimeter for field applications. Appl. Phys. Lett. 2013, 102, 144107. [Google Scholar] [CrossRef]
- Hinton, A.; Perea-Ortiz, M.; Winch, J.; Briggs, J.; Freer, S.; Moustoukas, D.; Powell-Gill, S.; Squire, C.; Lamb, A.; Rammeloo, C.; et al. A portable magneto-optical trap with prospects for atom interferometry in civil engineering. Phil. Trans. R. Soc. A 2017, 375, 20160238. [Google Scholar] [CrossRef]
- Ménoret, V.; Vermeulen, P.; Le Moigne, N.; Bonvalot, S.; Bouyer, P.; Landragin, A.; Desruelle, B. Gravity measurements below 10−9 g with a transportable absolute quantum gravimeter. Sci. Rep. 2018, 8, 12300. [Google Scholar] [CrossRef] [PubMed]
- Fu, Z.; Wu, B.; Cheng, B.; Zhou, Y.; Weng, K.; Zhu, D.; Wang, Z.; Lin, Q. A new type of compact gravimeter for long-term absolute gravity monitoring. Metrologia 2019, 56, 025001. [Google Scholar] [CrossRef]
- Chen, B.; Long, J.; Xie, H.; Li, C.; Chen, L.; Jiang, B.; Chen, S. Portable atomic gravimeter operating in noisy urban environments. Chin. Opt. Lett. 2020, 18, 090201. [Google Scholar] [CrossRef]
- Li, C.; Long, J.-B.; Huang, M.; Chen, B.; Yang, Y.; Jiang, X.; Xiang, C.; Ma, Z.; He, D.; Chen, L.; et al. Continuous gravity measurement with a portable atom gravimeter. Phys. Rev. A 2023, 108, 032811. [Google Scholar] [CrossRef]
- Wu, X.; Pagel, Z.; Malek, B.S.; Nguyen, T.H.; Zi, F.; Scheirer, D.S.; Müller, H. Gravity surveys using a mobile atom interferometer. Sci. Adv. 2019, 5, eaax0800. [Google Scholar] [CrossRef]
- Wu, B.; Zhou, Y.; Cheng, B.; Dong, Z.; Wang, K.; Zhu, X.; Chen, P.; Weng, K.; Yang, Q.; Lin, J.; et al. Static measurement of absolute gravity in truck based on atomic gravimeter. Acta. Phys. Sin. 2020, 69, 060302. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, W.; Sun, S.; Shu, Y.; Luo, Q.; Cheng, Y.; Hu, Z.; Zhou, M. A car-based portable atom gravimeter and its application in field gravity survey. AIP Adv. 2021, 11, 115223. [Google Scholar] [CrossRef]
- Wang, H.; Wang, K.; Xu, Y.; Tang, Y.; Wu, B.; Cheng, B.; Wu, L.; Zhou, Y.; Weng, K.; Zhu, D.; et al. A truck-borne system based on cold atom gravimeter for measuring the absolute gravity in the field. Sensors 2022, 22, 6172. [Google Scholar] [CrossRef]
- Bidel, Y.; Zahzam, N.; Blanchard, C.; Bonnin, A.; Cadoret, M.; Bresson, A.; Rouxel, D.; Lequentrec-Lalancette, M.F. Absolute marine gravimetry with matter-wave interferometry. Nat. Commun. 2018, 9, 627. [Google Scholar] [CrossRef]
- Cheng, B.; Zhou, Y.; Chen, P.; Zhang, K.; Zhu, D.; Wang, K.; Weng, K.; Wang, H.; Peng, S.; Wang, X.; et al. Absolute gravity measurement based on atomic gravimeter under mooring state of a ship. Acta Phys. Sin. 2021, 70, 040304. [Google Scholar]
- Zhou, Y.; Zhang, C.; Chen, P.; Cheng, B.; Zhu, D.; Wang, K.; Wang, X.; Wu, B.; Qiao, Z.; Lin, Q.; et al. A testing method for shipborne atomic gravimeter based on the modulated coriolis effect. Sensors 2023, 23, 881. [Google Scholar] [CrossRef] [PubMed]
- Bidel, Y.; Zahzam, N.; Bresson, A.; Blanchard, C.; Cadoret, M.; Olesen, A.V.; Forsberg, R. Absolute airborne gravimetry with a cold atom sensor. J. Geod. 2020, 94, 20. [Google Scholar] [CrossRef]
- Bidel, Y.; Zahzam, N.; Bresson, A.; Blanchard, C.; Bonnin, A.; Bernard, J.; Cadoret, M.; Jensen, T.E.; Forsberg, R.; Salaun, C.; et al. Airborne absolute gravimetry with a quantum sensor, comparison with classical technologies. J. Geod. Res. 2023, 128, e2022JB025921. [Google Scholar] [CrossRef]
- Antoni-Micollier, L.; Carbone, D.; Ménoret, V.; Lautier-Gaud, J.; King, T.; Greco, F.; Messina, A.; Contrafatto, D.; Desruelle, B. Detecting volcano-related underground mass changes with a quantum gravimeter. Geophys. Res. Lett. 2022, 49, e2022GL097814. [Google Scholar] [CrossRef]
- Shettell, N.; Lee, K.S.; Oon, F.E.; Maksimova, E.; Hufnagel, C.; Wei, S.; Dumke, R. Geophysical Gravity Survey using an Atomic Gravimeter as an Absolute Reference. arXiv 2023, arXiv:2311.00415. [Google Scholar]
- Gong, W.; Li, A.; Huang, C.; Che, H.; Feng, C.; Qin, F. Effects and Prospects of the Vibration Isolation Methods for an Atomic Interference Gravimeter. Sensors 2022, 22, 583. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Li, Y.; Li, J. Negative stiffness devices for vibration isolation applications: A review. Adv. Struct. Eng. 2020, 23, 1739–1755. [Google Scholar] [CrossRef]
- Zarastvand, M.R.; Ghassabi, M.; Talebitooti, R. Acoustic Insulation Characteristics of Shell Structures: A Review. Arch. Comput. Methods Eng. 2021, 28, 505–523. [Google Scholar] [CrossRef]
- Schmidt, M.; Senger, A.; Hauth, M.; Freier, C.; Schkolnik, V.; Peters, A. A mobile high-precision absolute gravimeter based on atom interferometry. Gyroscopy Navig. 2011, 2, 170–177. [Google Scholar] [CrossRef]
- Zhou, M.; Hu, Z.; Duan, X.; Sun, B.; Chen, L.; Zhang, Q.; Luo, J. Performance of a cold-atom gravimeter with an active vibration isolator. Phys. Rev. A 2012, 86, 043630. [Google Scholar] [CrossRef]
- Tang, B.; Zhou, L.; Xiong, Z.; Wang, J.; Zhan, M. A programmable broadband low frequency active vibration isolation system for atom interferometry. Rev. Sci. Instrum. 2014, 85, 093109. [Google Scholar] [CrossRef] [PubMed]
- Zhou, M.; Xiong, X.; Chen, L.; Cui, J.; Duan, X.; Hu, Z. Note: A three-dimension active vibration isolator for precision atom gravimeters. Rev. Sci. Instrum. 2015, 86, 046108. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Long, J.; Xie, H.; Chen, L.; Chen, S. A mobile three-dimensional active vibration isolator and its application to cold atom interferometry. Acta Phys. Sin. 2019, 68, 183301. [Google Scholar] [CrossRef]
- Oon, F.E.; Dumke, R. Compact active vibration isolation and tilt stabilization for a portable high-precision atomic gravimeter. Phys. Rev. Appl. 2022, 18, 044037. [Google Scholar] [CrossRef]
- Le Gouët, J.; Mehlstäubler, T.E.; Kim, J.; Merlet, S.; Clairon, A.; Landragin, A.; Dos Santos, F.P. Limits to the sensitivity of a low noise compact atomic gravimeter. Appl. Phys. B 2008, 92, 133–144. [Google Scholar] [CrossRef]
- Platus, D. Negative-stiffness-mechanism vibration isolation systems. In Optomechanical Engineering and Vibration Control; SPIE: Bellingham, WA, USA, 1999; Volume 3786, pp. 98–105. [Google Scholar]
- LaCoste, L. LaCoste and Romberg straight-line gravity meter. Geophysics 1983, 48, 606–610. [Google Scholar] [CrossRef]
- Merlet, S.; Le Gouët, J.; Bodart, Q.; Clairon, A.; Landragin, A.; Dos Santos, F.P.; Rouchon, P. Operating an atom interferometer beyond its linear range. Metrologia 2009, 46, 87. [Google Scholar] [CrossRef]
- Peters, A.; Chung, K.Y.; Chu, S. High-precision gravity measurements using atom interferometry. Metrologia 2001, 38, 25. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, S.; Zhuang, W.; Li, T. Raman-laser system for absolute gravimeter based on 87Rb atom interferometer. Photonics 2020, 7, 32. [Google Scholar] [CrossRef]
- Cheinet, P.; Canuel, B.; Dos Santos, F.P.; Gauguet, A.; Yver-Leduc, F.; Landragin, A. Measurement of the sensitivity function in a time-domain atomic interferometer. IEEE. Trans. Instrum. Meas. 2008, 57, 1141–1148. [Google Scholar] [CrossRef]
- Zhuang, W.; Cao, S.; Wang, S.; Zhao, Y.; Fang, F.; Li, T. Research on laser frequency tracing of atomic interference gravimeter. Metrol. Sci. Technol. 2020, 11, 68–72. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, C.; Zhuang, W.; Yao, J.; Zhao, Y.; Ma, Z.; Yi, C.; Tian, Q.; Wu, S.; Fang, F.; Wen, Y. A Transportable Atomic Gravimeter with Constraint-Structured Active Vibration Isolation. Sensors 2024, 24, 2395. https://doi.org/10.3390/s24082395
Ruan C, Zhuang W, Yao J, Zhao Y, Ma Z, Yi C, Tian Q, Wu S, Fang F, Wen Y. A Transportable Atomic Gravimeter with Constraint-Structured Active Vibration Isolation. Sensors. 2024; 24(8):2395. https://doi.org/10.3390/s24082395
Chicago/Turabian StyleRuan, Chuanjing, Wei Zhuang, Jiamin Yao, Yang Zhao, Zenghan Ma, Cong Yi, Qin Tian, Shuqing Wu, Fang Fang, and Yinghong Wen. 2024. "A Transportable Atomic Gravimeter with Constraint-Structured Active Vibration Isolation" Sensors 24, no. 8: 2395. https://doi.org/10.3390/s24082395
APA StyleRuan, C., Zhuang, W., Yao, J., Zhao, Y., Ma, Z., Yi, C., Tian, Q., Wu, S., Fang, F., & Wen, Y. (2024). A Transportable Atomic Gravimeter with Constraint-Structured Active Vibration Isolation. Sensors, 24(8), 2395. https://doi.org/10.3390/s24082395