
Optimal Microphone Array Placement Design Using the Bayesian Optimization Method


Abstract
1. Introduction
- Considering that the microphone array design problem is non-convex and non-linear, the Bayesian optimization method is extended to solve the microphone array placement design problem;
- GP regression is used to surrogate objective function in the microphone array placement design optimization problem, while different acquisition function strategies are applied;
- Numerical experiments demonstrate that the proposed Bayesian optimization method could produce the same or better performance with shorter computational time compared with the hybrid descent method [9].
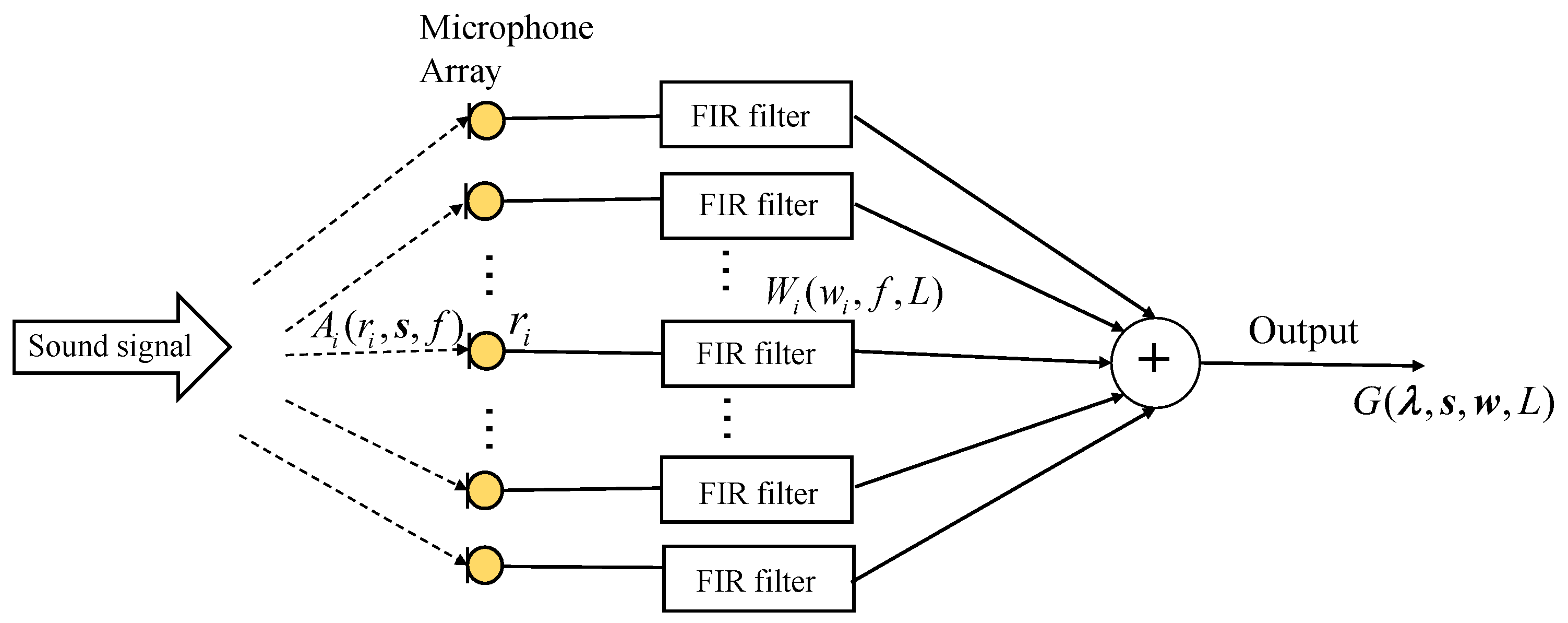
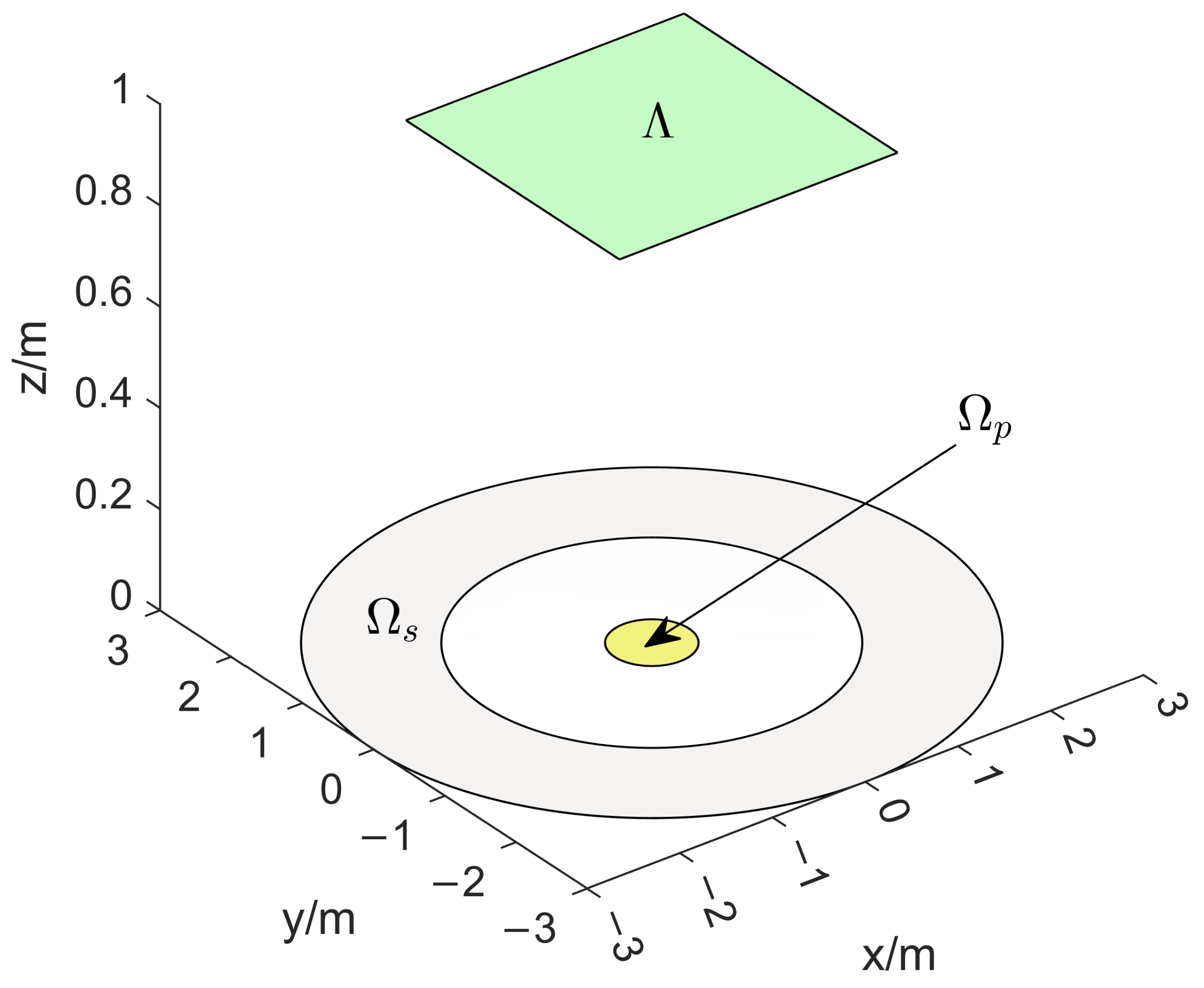
2. Problem Formulation
3. Bayesian Optimization Method
3.1. GP Regression
3.2. Choosing Prior Hyperparameters
3.3. Acquisition Function
| Algorithm 1 Bayesian optimization method for microphone array placement design |
|
4. Numerical Experiment
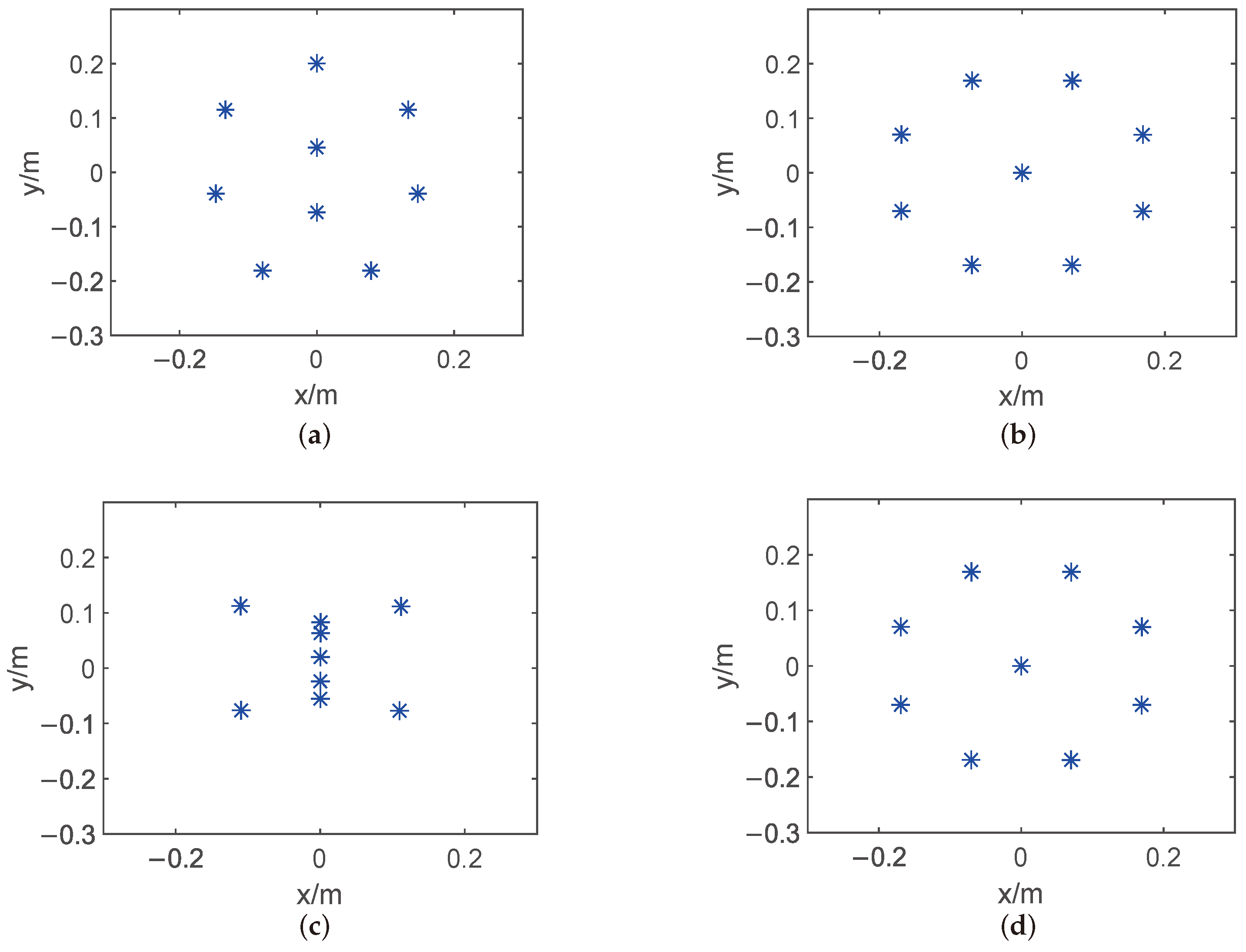
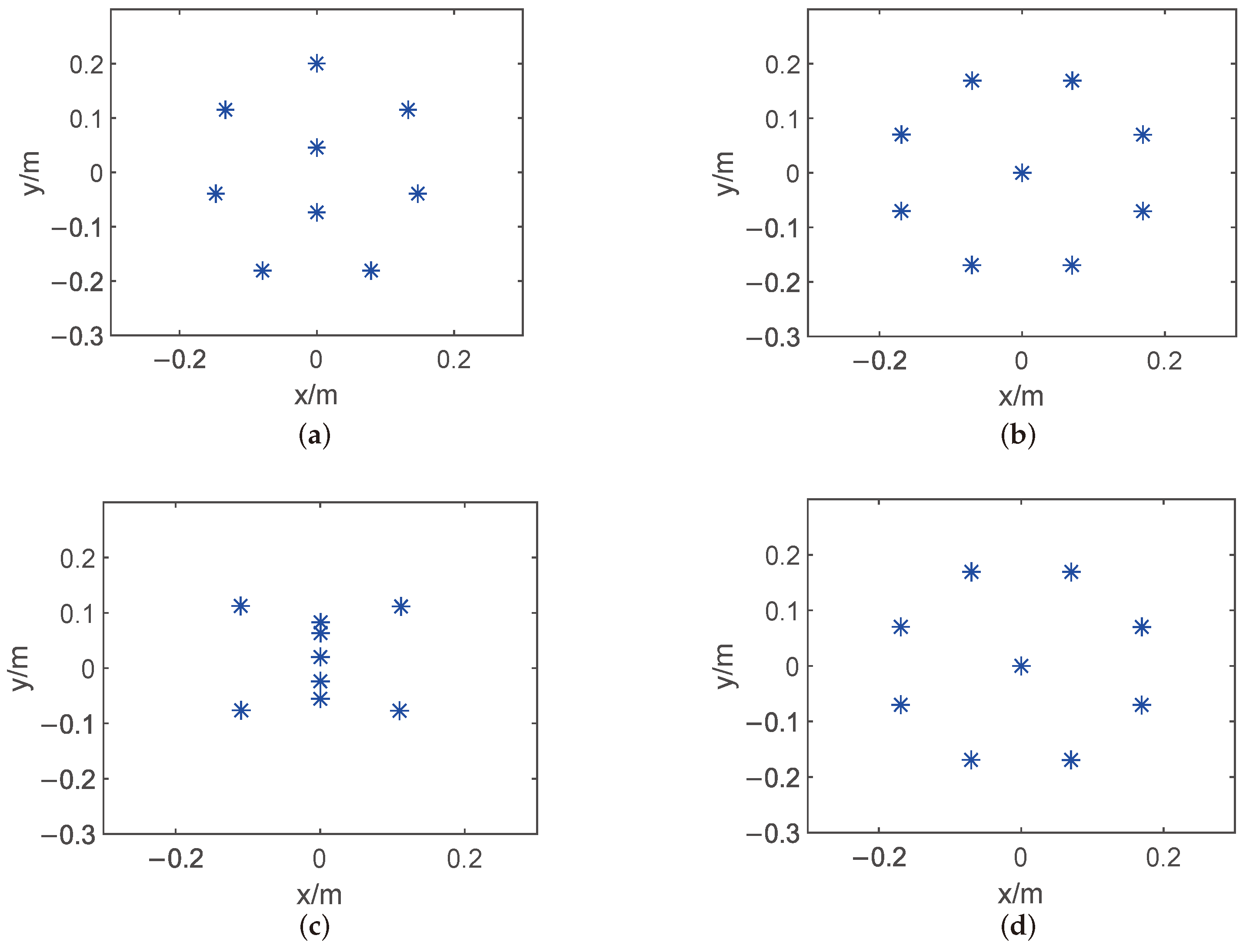
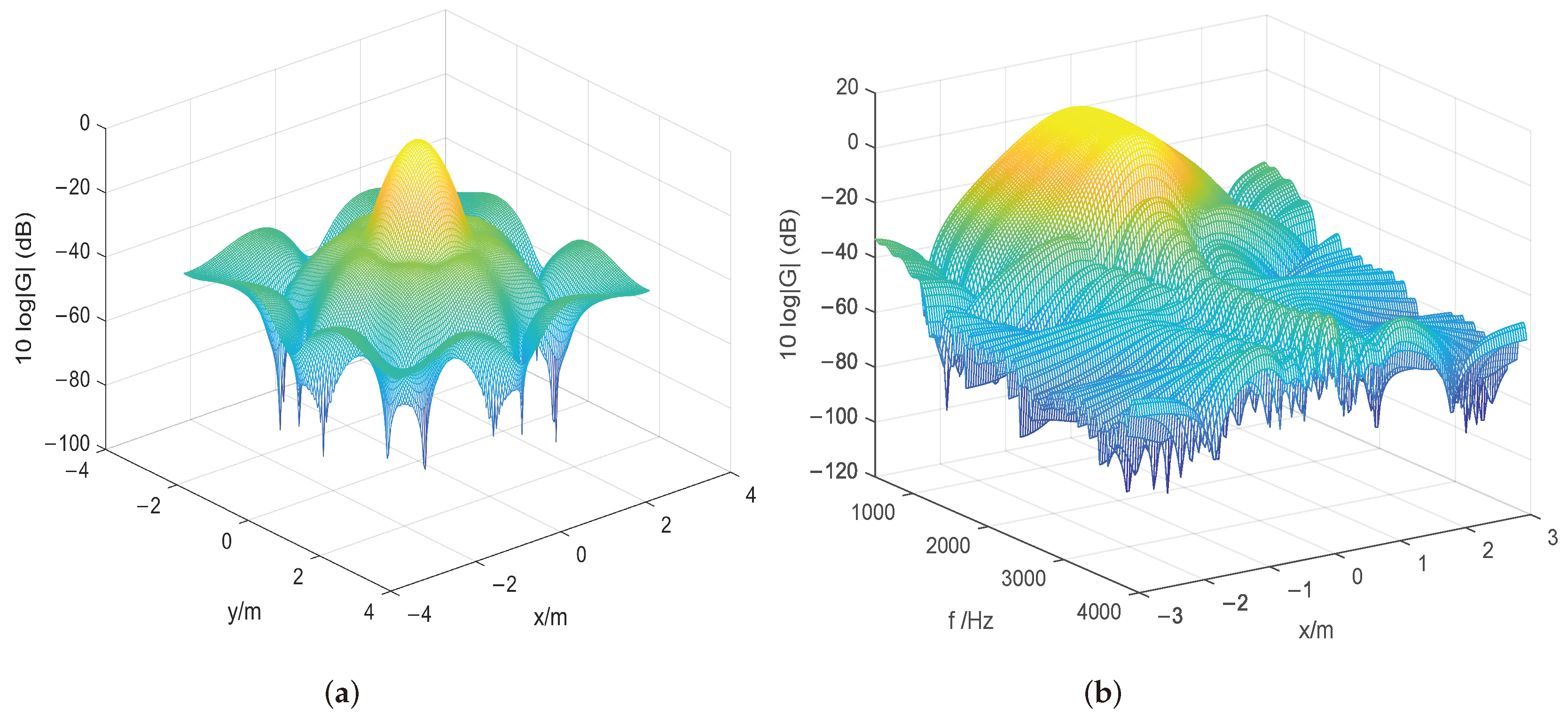
4.1. The 2D Microphone Array Placement Design Problem
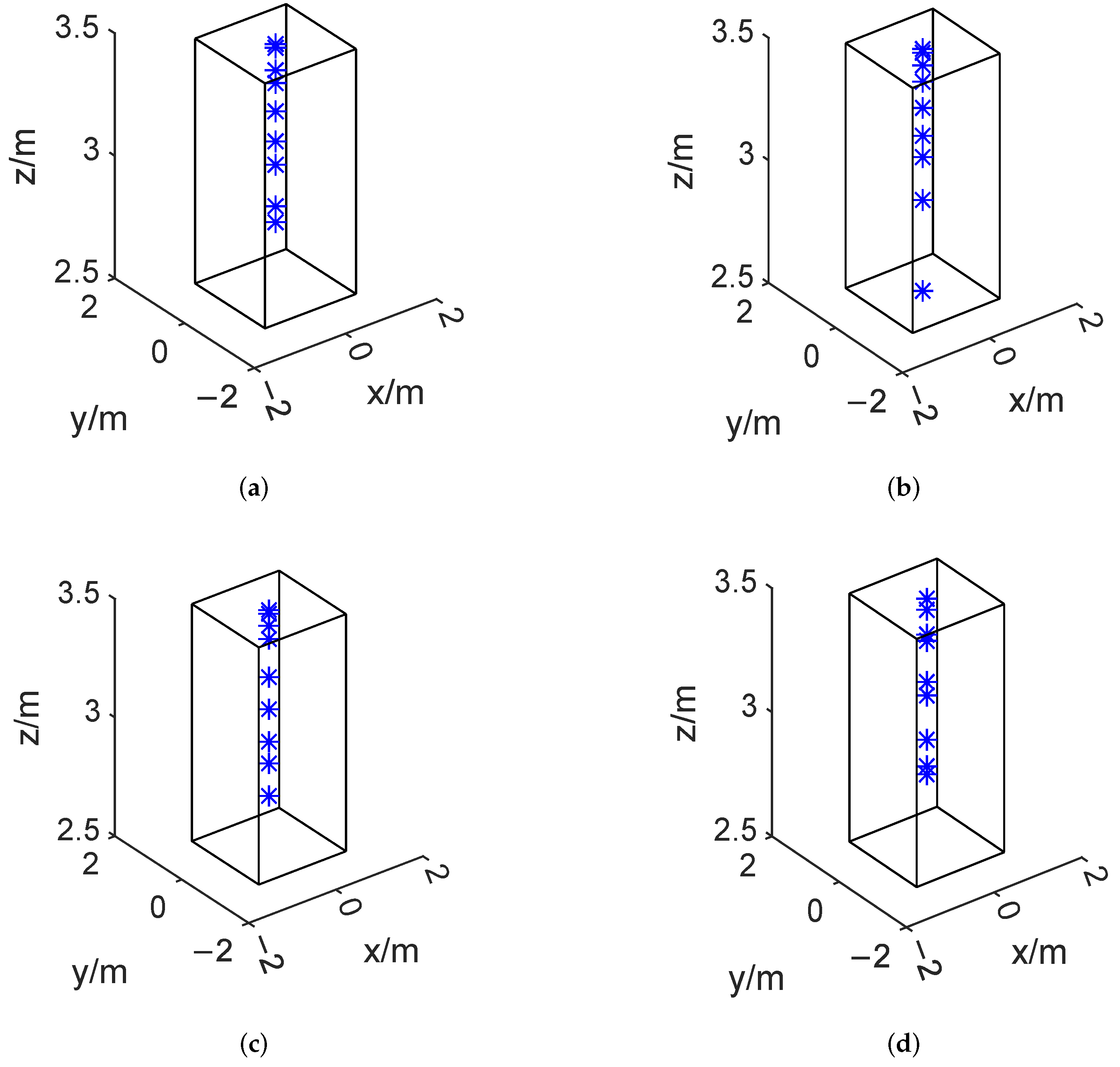
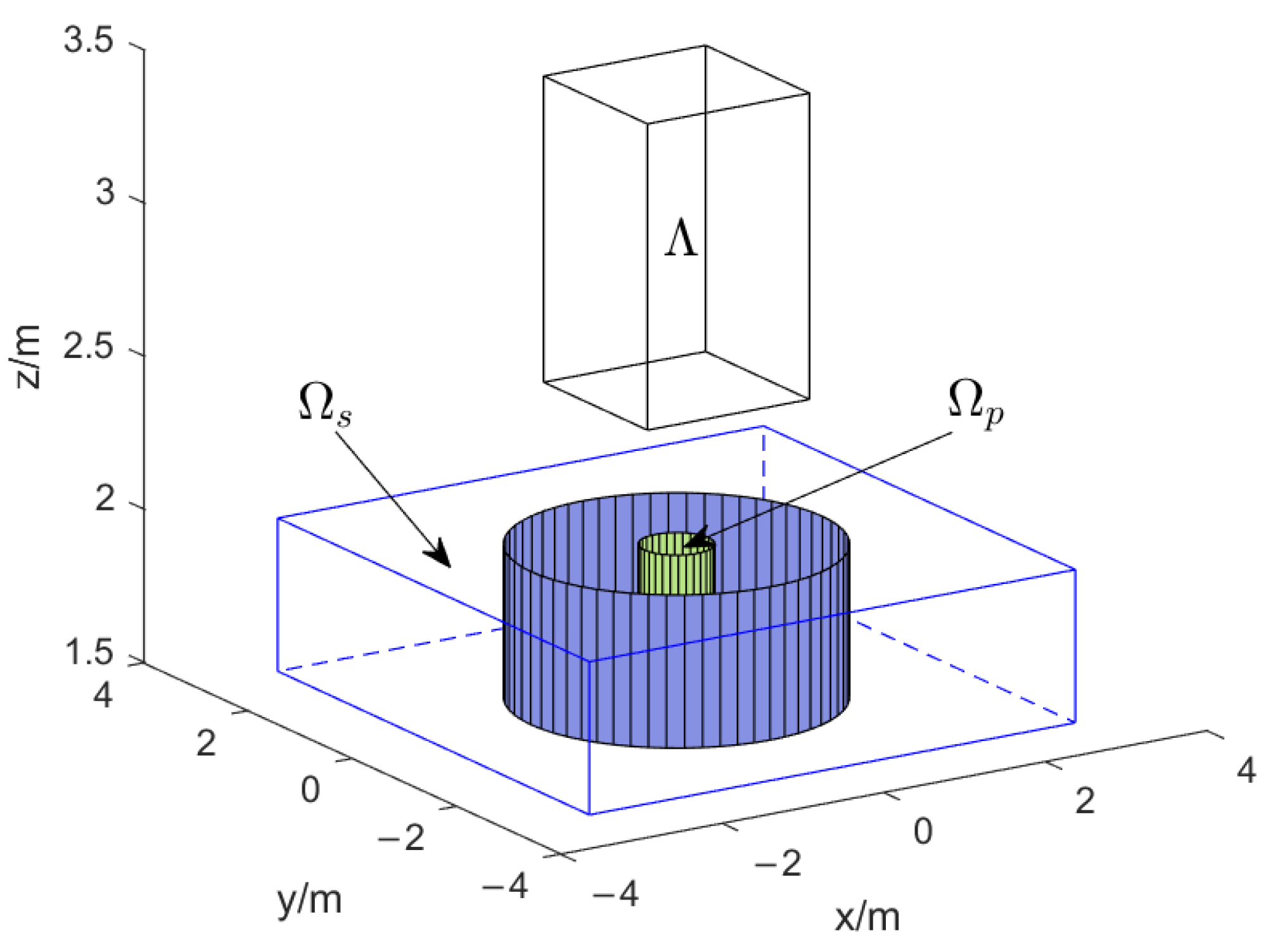
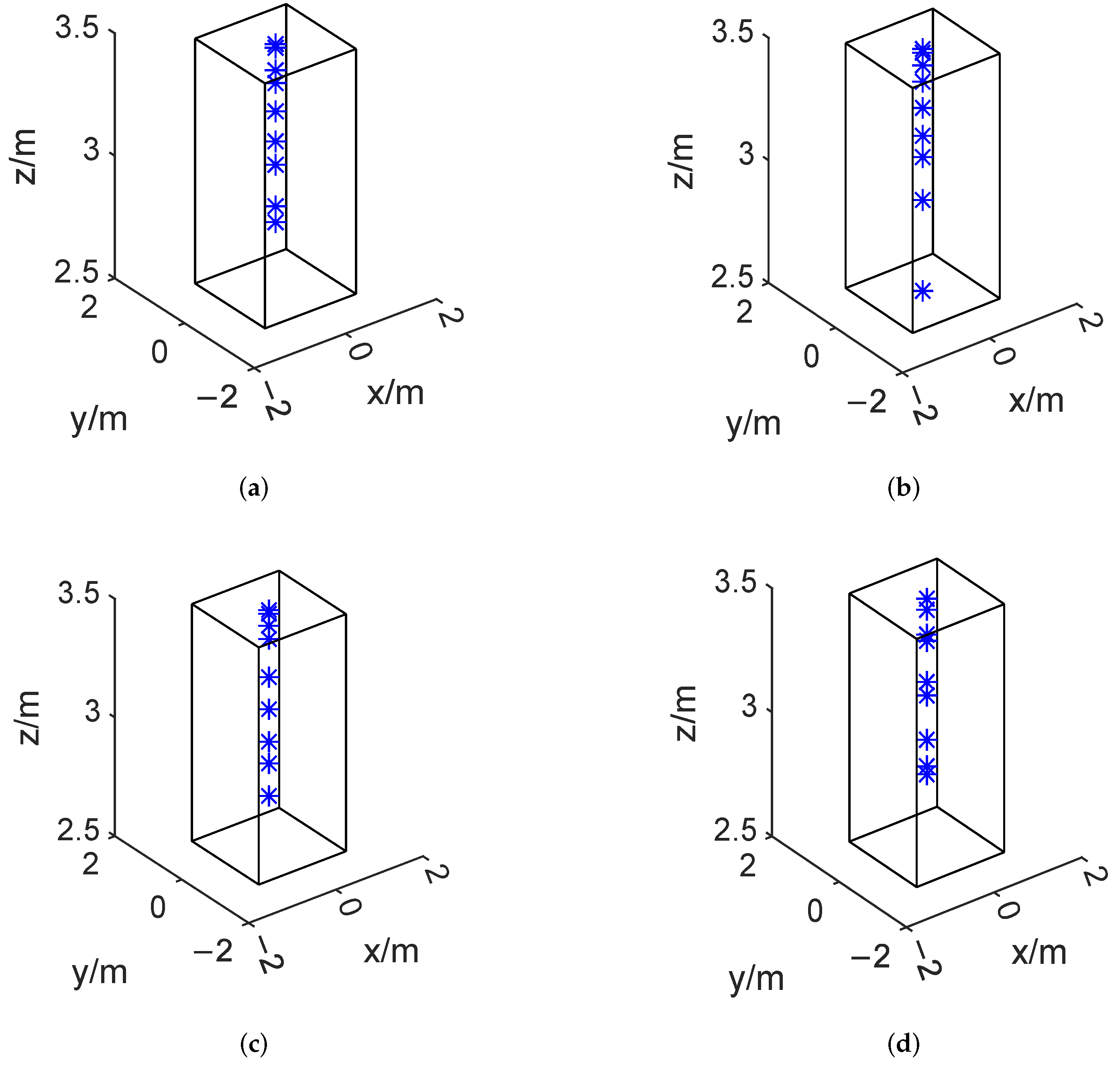
4.2. The 3D Microphone Array Placement Problem
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Winters, J.H. Smart antennas for wireless systems. IEEE Pers. Commun. 1998, 5, 23–27. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y. Microphone Array Signal Processing; Springer: Berlin, Germany, 2008. [Google Scholar]
- Gannot, S.; Burshtein, D.; Weinstein, E. Signal enhancement using beamforming and nonstationarity with applications to speech. IEEE Trans. Signal Process. 2001, 49, 1614–1626. [Google Scholar] [CrossRef]
- Brandstein, M.; Ward, D. Microphone Arrays: Signal Processing Techniques and Applications; Springer: Berlin, Germany, 2001. [Google Scholar]
- Frost, O.L. An algorithm for linearly constrained adaptive array processing. Proc. IEEE 1972, 60, 926–935. [Google Scholar] [CrossRef]
- Feng, Z.G.; Yiu, K.F.C.; Nordholm, S.E. Performance limit of broadband beamformer designs in space and frequency. J. Optim. Theory Appl. 2015, 164, 316–341. [Google Scholar] [CrossRef]
- Khalid, L.; Nordholm, S.E.; Dam, H.H. Design study on microphone arrays. In Proceedings of the 2015 IEEE International Conference on Digital Signal Processing (DSP), Singapore, 21–24 July 2015; pp. 1171–1175. [Google Scholar]
- Feng, Z.G.; Yiu, K.F.C.; Nordholm, S.E. Placement design of microphone arrays in near-field broadband beamformers. IEEE Trans. Signal Process. 2011, 60, 1195–1204. [Google Scholar] [CrossRef]
- Li, Z.B.; Yiu, K.F.C.; Feng, Z.G. A hybrid descent method with genetic algorithm for microphone array placement design. Appl. Soft Comput. 2013, 13, 1486–1490. [Google Scholar] [CrossRef]
- Oliveri, G.; Donelli, M.; Massa, A. Linear array thinning exploiting almost difference sets. IEEE Trans. Antennas Propag. 2009, 57, 3800–3812. [Google Scholar] [CrossRef]
- Rocca, P.; Haupt, R.L. Dynamic array thinning for adaptive interference cancellation. In Proceedings of the Fourth European Conference on Antennas and Propagation, Barcelona, Spain, 12–16 April 2010; pp. 1–3. [Google Scholar]
- Fernandez-Delgado, M.; Rodriguez-Gonzalez, J.; Iglesias, R.; Barro, S.; Ares-Pena, F. Fast array thinning using global optimization methods. J. Electromagn. Waves Appl. 2010, 24, 2259–2271. [Google Scholar] [CrossRef]
- Chen, K.; Yun, X.; He, Z.; Han, C. Synthesis of sparse planar arrays using modified real genetic algorithm. IEEE Trans. Antennas Propag. 2007, 55, 1067–1073. [Google Scholar] [CrossRef]
- Khatami, I.; Jamalabadi, M.Y.A. Optimal design of microphone array in a planar circular configuration by genetic algorithm enhanced beamforming. J. Therm. Anal. Calorim. 2021, 145, 1817–1825. [Google Scholar] [CrossRef]
- Macho-Pedroso, R.; Domingo-Perez, F.; Velasco, J.; Losada-Gutierrez, C.; Macias-Guarasa, J. Optimal microphone placement for indoor acoustic localization using evolutionary optimization. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Yu, J.; Donohue, K.D. Optimal irregular microphone distributions with enhanced beamforming performance in immersive environments. J. Acoust. Soc. Am. 2013, 134, 2066–2077. [Google Scholar] [CrossRef]
- Trucco, A. Weighting and thinning wide-band arrays by simulated annealing. Ultrasonics 2002, 40, 485–489. [Google Scholar] [CrossRef] [PubMed]
- Razavi, A.; Forooraghi, K. Thinned arrays using pattern search algorithms. Prog. Electromagn. Res. 2008, 78, 61–71. [Google Scholar] [CrossRef]
- Malgoezar, A.; Snellen, M.; Sijtsma, P.; Simons, D. Improving beamforming by optimization of acoustic array microphone positions. In Proceedings of the 6th Berlin Beamforming Conference, Berlin, Germany, 29 February–1 March 2016; p. 5. [Google Scholar]
- Hawes, M.B.; Liu, W. Sparse microphone array design for wideband beamforming. In Proceedings of the 2013 18th International Conference on Digital Signal Processing (DSP), Fira, Santorini, Greece, 1–3 July 2013; pp. 1–5. [Google Scholar]
- Chan, K.Y.; Yiu, C.K.F.; Nordholm, S. Microphone configuration for beamformer design using the Taguchi method. Measurement 2017, 96, 58–66. [Google Scholar] [CrossRef]
- Frazier, P.I. A tutorial on Bayesian optimization. arXiv 2018, arXiv:1807.02811. [Google Scholar]
- Shahriari, B.; Swersky, K.; Wang, Z.; Adams, R.P.; Freitas, N.D. Taking the human out of the loop: A review of Bayesian optimization. Proc. IEEE 2015, 104, 148–175. [Google Scholar] [CrossRef]
- Snoek, J.; Larochelle, H.; Adams, R.P. Practical bayesian optimization of machine learning algorithms. Proc. Adv. Neural Inf. Process. Syst. 2012, 25, 2960–2968. [Google Scholar]
- Mockus, J.B.; Mockus, L.J. Bayesian approach to global optimization and application to multiobjective and constrained problems. J. Optim. Theory Appl. 1991, 70, 157–172. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient global optimization of expensive black-box functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Forrester, A.; Sobester, A.; Keane, A. Engineering Design via Surrogate Modelling: A Practical Guide; John Wiley & Sons: New York, NY, USA, 2008. [Google Scholar]
- Frazier, P.I.; Wang, J. Bayesian optimization for materials design. Proc. Inf. Sci. Mater. Discov. Des. 2015, 225, 45–75. [Google Scholar]
- Packwood, D. Bayesian Optimization for Materials Science; Springer: Berlin, Germany, 2017. [Google Scholar]
- Williams, C.; Rasmussen, C. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 2. [Google Scholar]
- Mockus, J. Application of Bayesian approach to numerical methods of global and stochastic optimization. J. Glob. Optim. 1994, 4, 347–365. [Google Scholar] [CrossRef]
- Schulz, E.; Speekenbrink, M.; Krause, A. A tutorial on Gaussian process regression: Modelling, exploring, and exploiting functions. J. Math. Psychol. 2018, 85, 1–16. [Google Scholar] [CrossRef]
- Lu, C.C.; Tang, X.O. Surpassing human-level face verification performance on LFW with GaussianFace. In Proceedings of the 29th AAAI Conference on Artificial Intelligence, Austin, TX, USA, 25–30 January 2015; Volume 29, pp. 1–9. [Google Scholar]
- Neal, R.M. Bayesian Learning for Neural Networks; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Myung, I.J. Tutorial on maximum likelihood estimation. J. Math. Psychol. 2003, 47, 90–100. [Google Scholar] [CrossRef]
- Kushner, H.J. A new method of locating the maximum point of an arbitrary multipeak curve in the presence of noise. J. Fluids Eng. 1964, 86, 97–106. [Google Scholar] [CrossRef]
- Mockus, J.; Tiesis, V.; Zilinskas, A. The application of Bayesian methods for seeking the extremum. Towards Glob. Optim. 1978, 2, 117–129. [Google Scholar]
- Brochu, E.; Cora, V.M.; De, F.N. A tutorial on Bayesian optimization of expensive cost functions, with application to active user modeling and hierarchical reinforcement learning. arXiv 2010, arXiv:1012.2599. [Google Scholar]
- Srinivas, N.; Krause, A.; Kakade, S.M.; Seeger, M. Gaussian process optimization in the bandit setting: No regret and experimental design. In Proceedings of the 27th International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; pp. 1015–1022. [Google Scholar]
- Lai, T.L.; Robbins, H. Asymptotically efficient adaptive allocation rules. Adv. Appl. Math. 1985, 6, 4–22. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GP-PI | GP-EI | GP-LCB | GA-Gradient * | Linear | |
|---|---|---|---|---|---|
| CPU time (s) | 1255 | 1518 | 1375 | 6407 | - |
| PLIM (dB) | −38.5996 | −39.1635 | −38.1337 | −39.1635 | −19.4577 |
| (dB) | −43.5372 | −45.6333 | −42.0707 | −45.6333 | −25.0743 |
| GP-PI | GP-EI | GP-LCB | GA-Gradient * | Linear | |
|---|---|---|---|---|---|
| CPU time (s) | 1718 | 1597 | 1535 | 8340 | - |
| PLIM (dB) | −36.7066 | −36.7088 | −36.7082 | −36.6520 | −16.9972 |
| (dB) | −61.2713 | −62.7589 | −63.1721 | −61.7405 | −27.4568 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, Z.; Yiu, K.F.C. Optimal Microphone Array Placement Design Using the Bayesian Optimization Method. Sensors 2024, 24, 2434. https://doi.org/10.3390/s24082434
Zhang Y, Li Z, Yiu KFC. Optimal Microphone Array Placement Design Using the Bayesian Optimization Method. Sensors. 2024; 24(8):2434. https://doi.org/10.3390/s24082434
Chicago/Turabian StyleZhang, Yuhan, Zhibao Li, and Ka Fai Cedric Yiu. 2024. "Optimal Microphone Array Placement Design Using the Bayesian Optimization Method" Sensors 24, no. 8: 2434. https://doi.org/10.3390/s24082434
APA StyleZhang, Y., Li, Z., & Yiu, K. F. C. (2024). Optimal Microphone Array Placement Design Using the Bayesian Optimization Method. Sensors, 24(8), 2434. https://doi.org/10.3390/s24082434