
Comprehensive Analysis of Xiaomi Mi 8 GNSS Antenna Performance

 , and
, and
Abstract
:1. Introduction
2. Materials
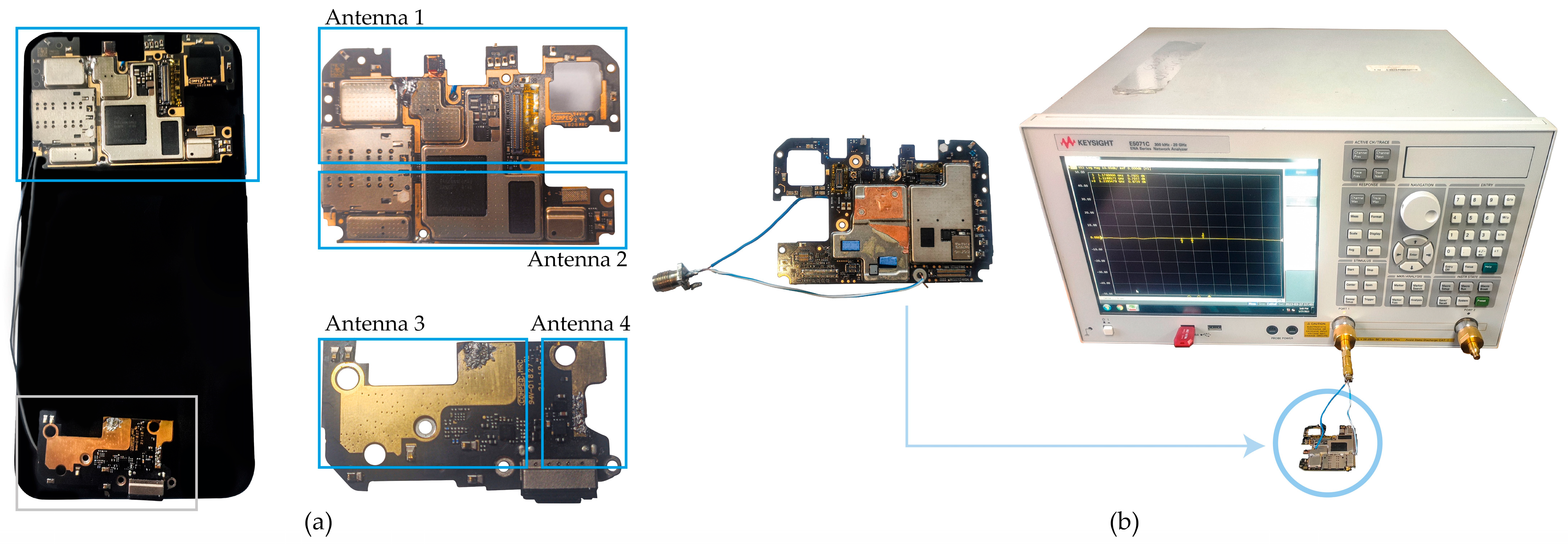
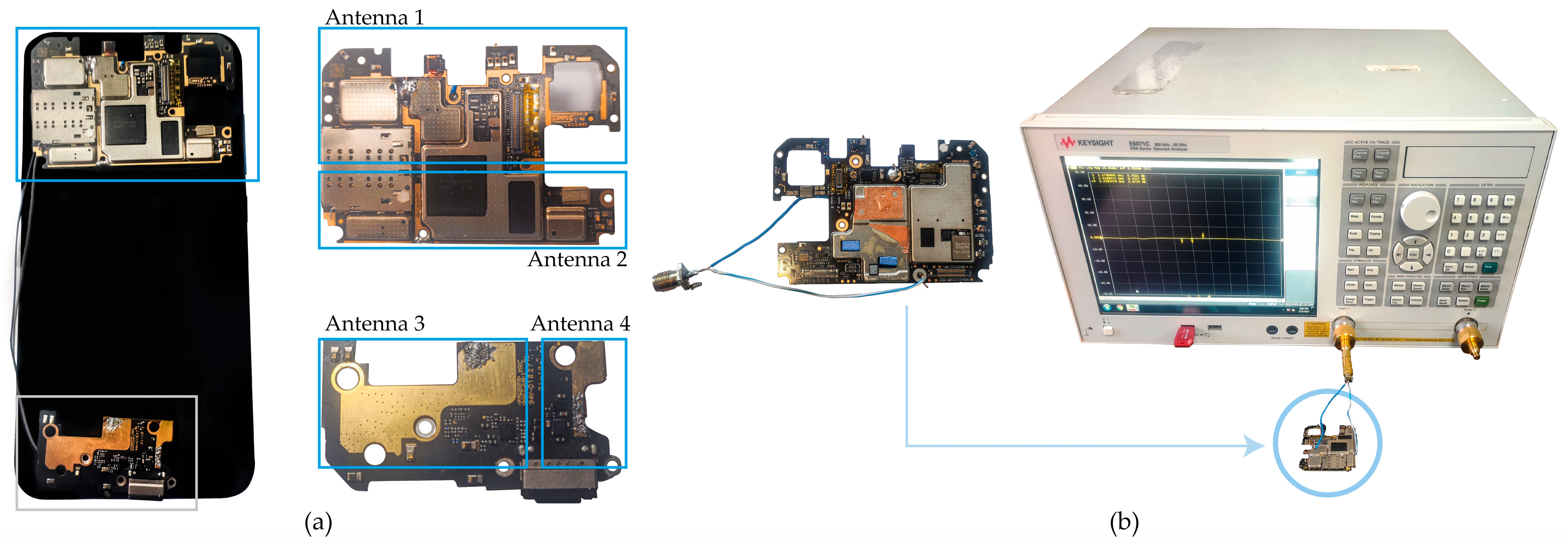
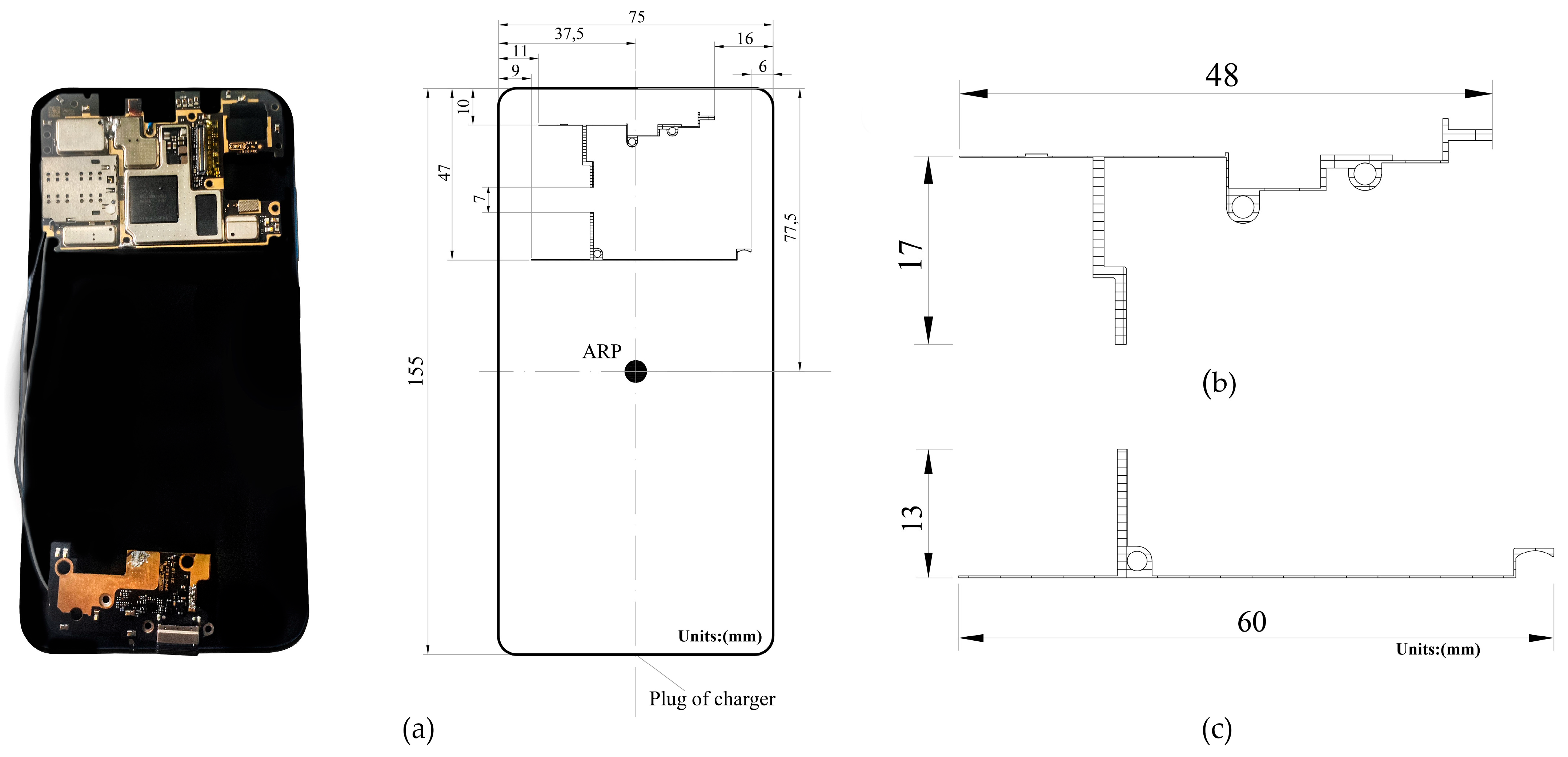
2.1. Xiaomi Mi 8 Antennas
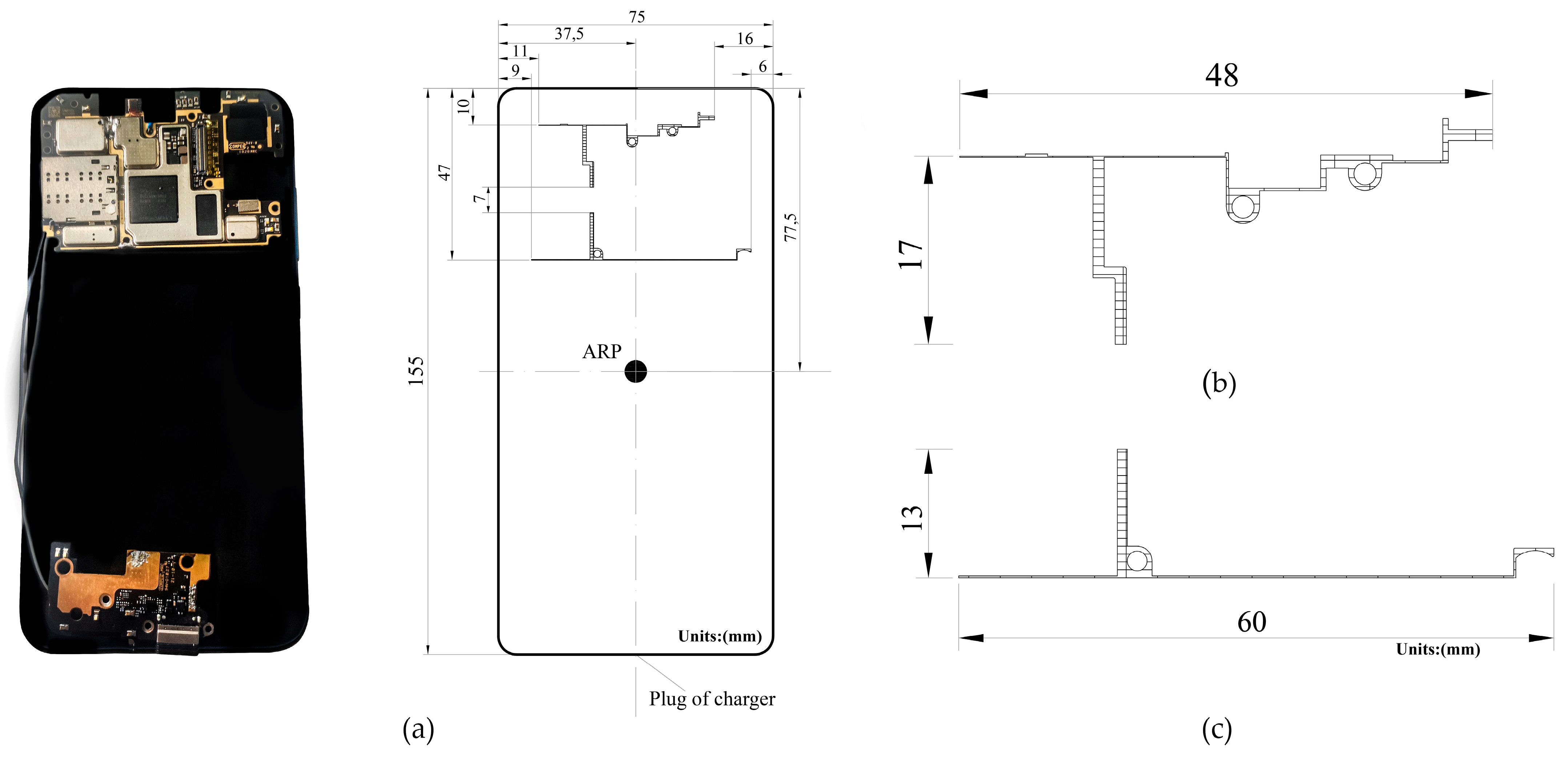
2.2. GNSS Antenna
3. Methods
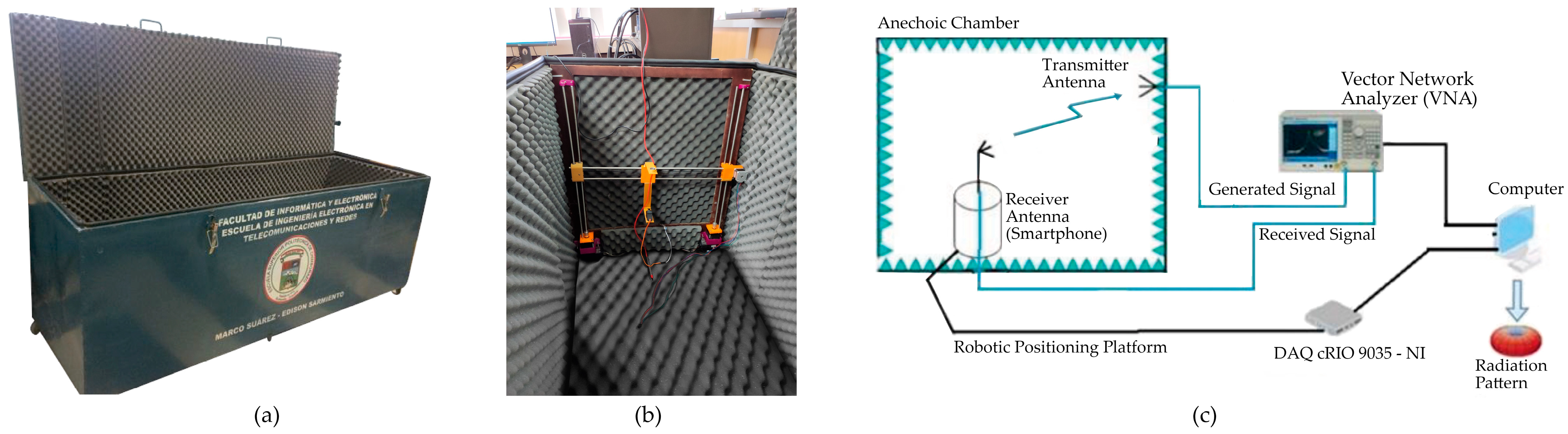
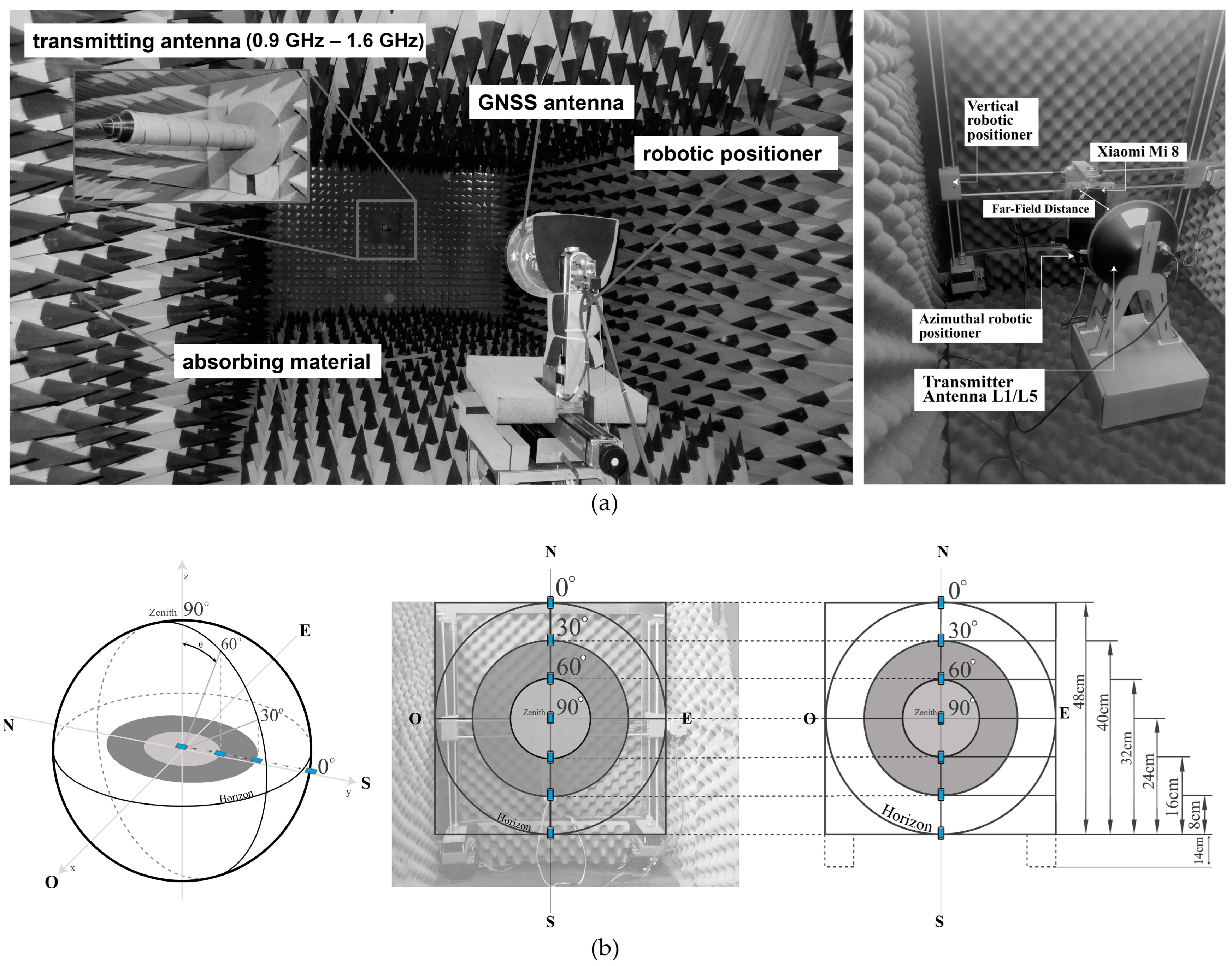
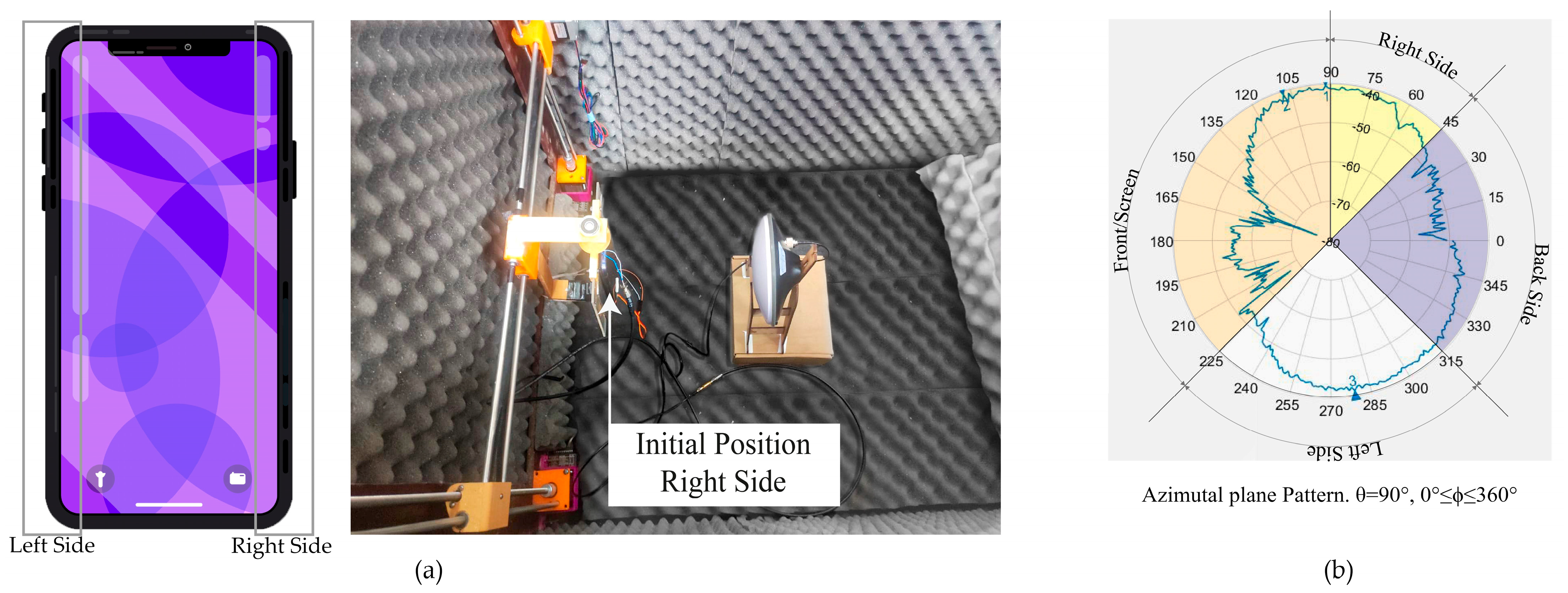
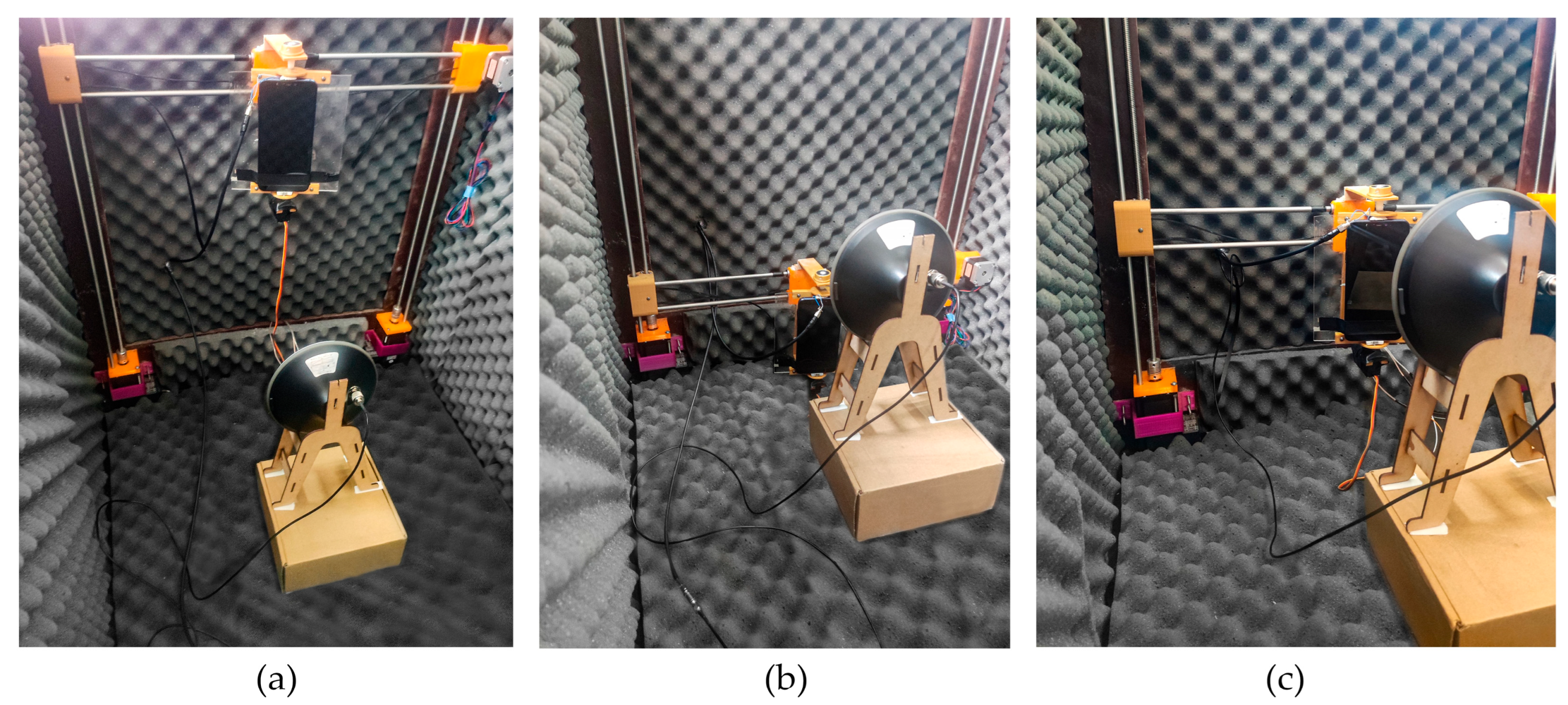
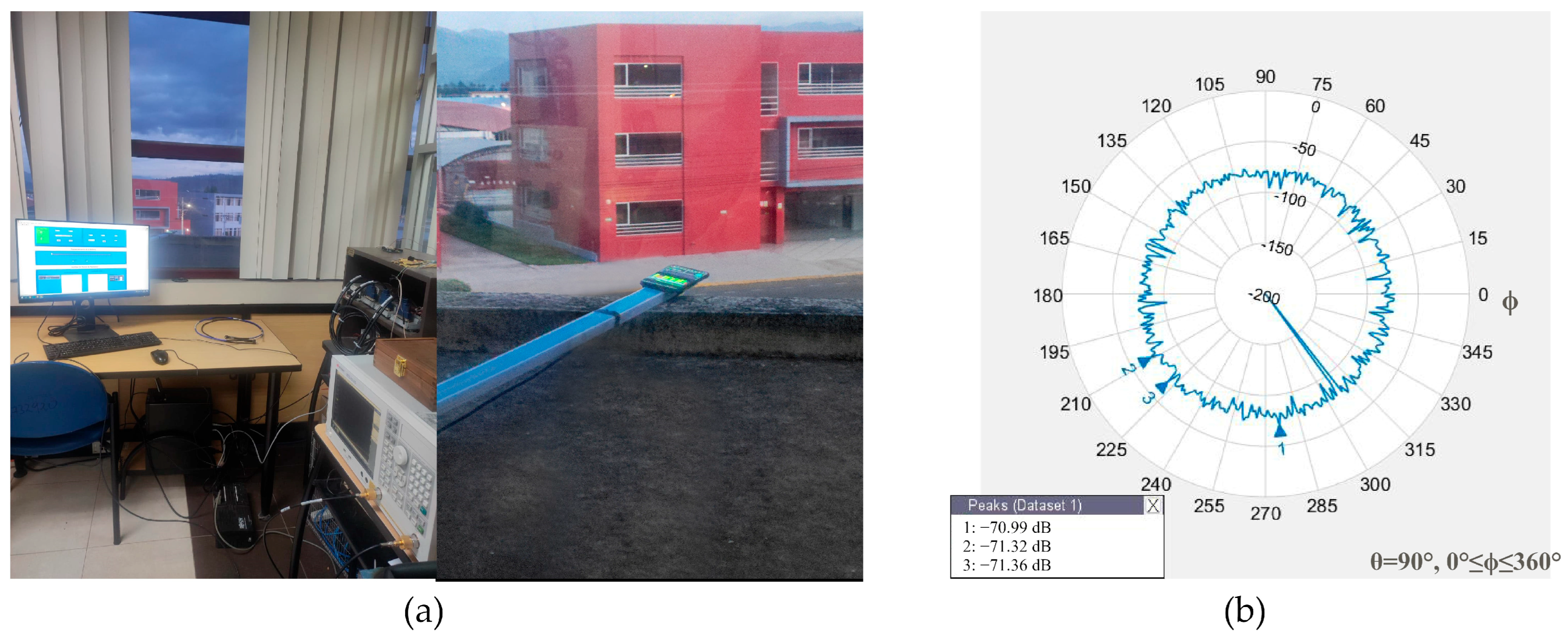
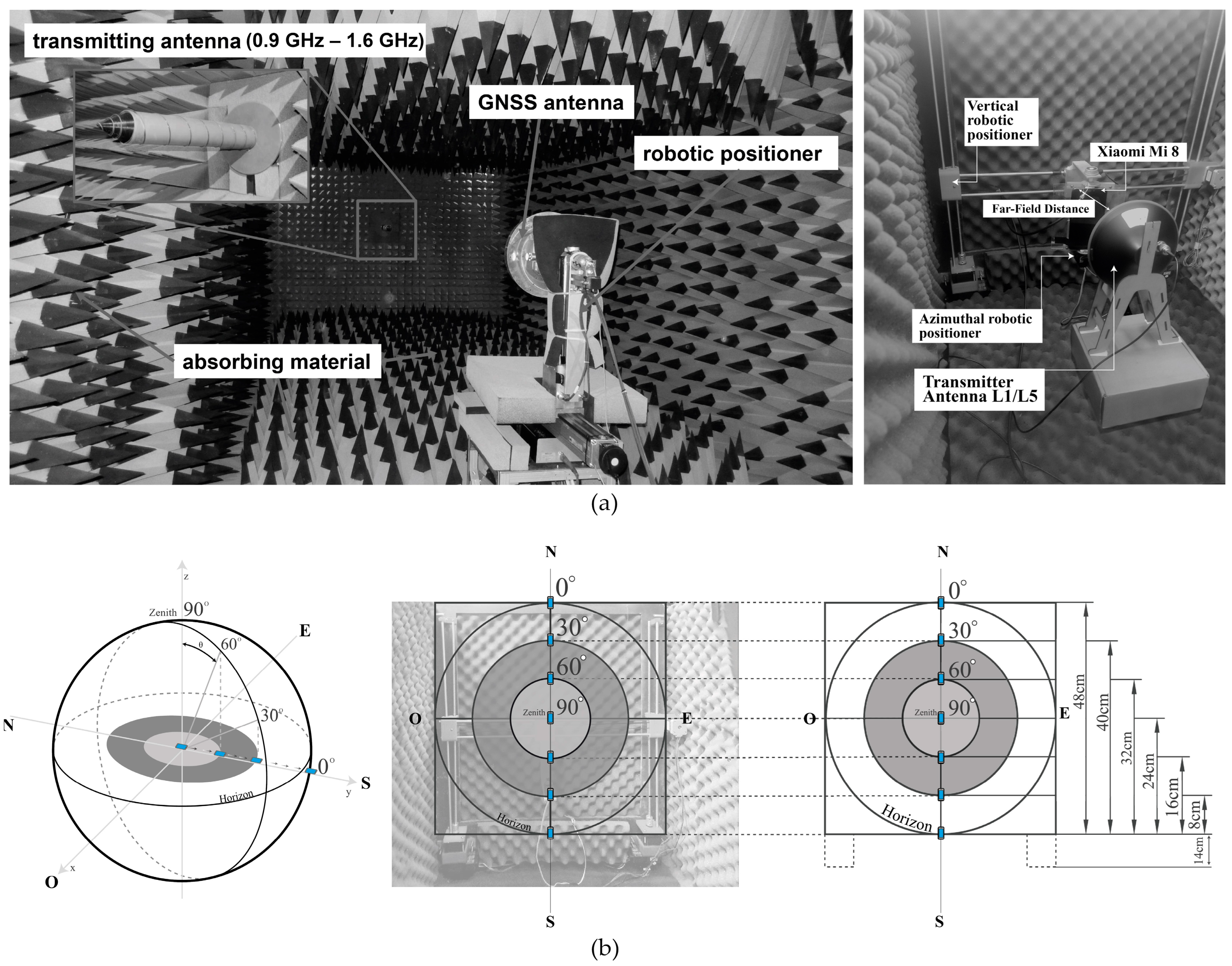
3.1. Test Scenario Setup
- is the longest side of the antenna in Figure 3b;
- is the frequency wavelength.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | D [mm] | R [m] |
|---|---|---|
| L1 | 48 | 0.0242 |
| L5 | 60 | 0.0288 |
3.2. Pattern Radiation Measurement: Initial Conditions
4. Experiments and Results
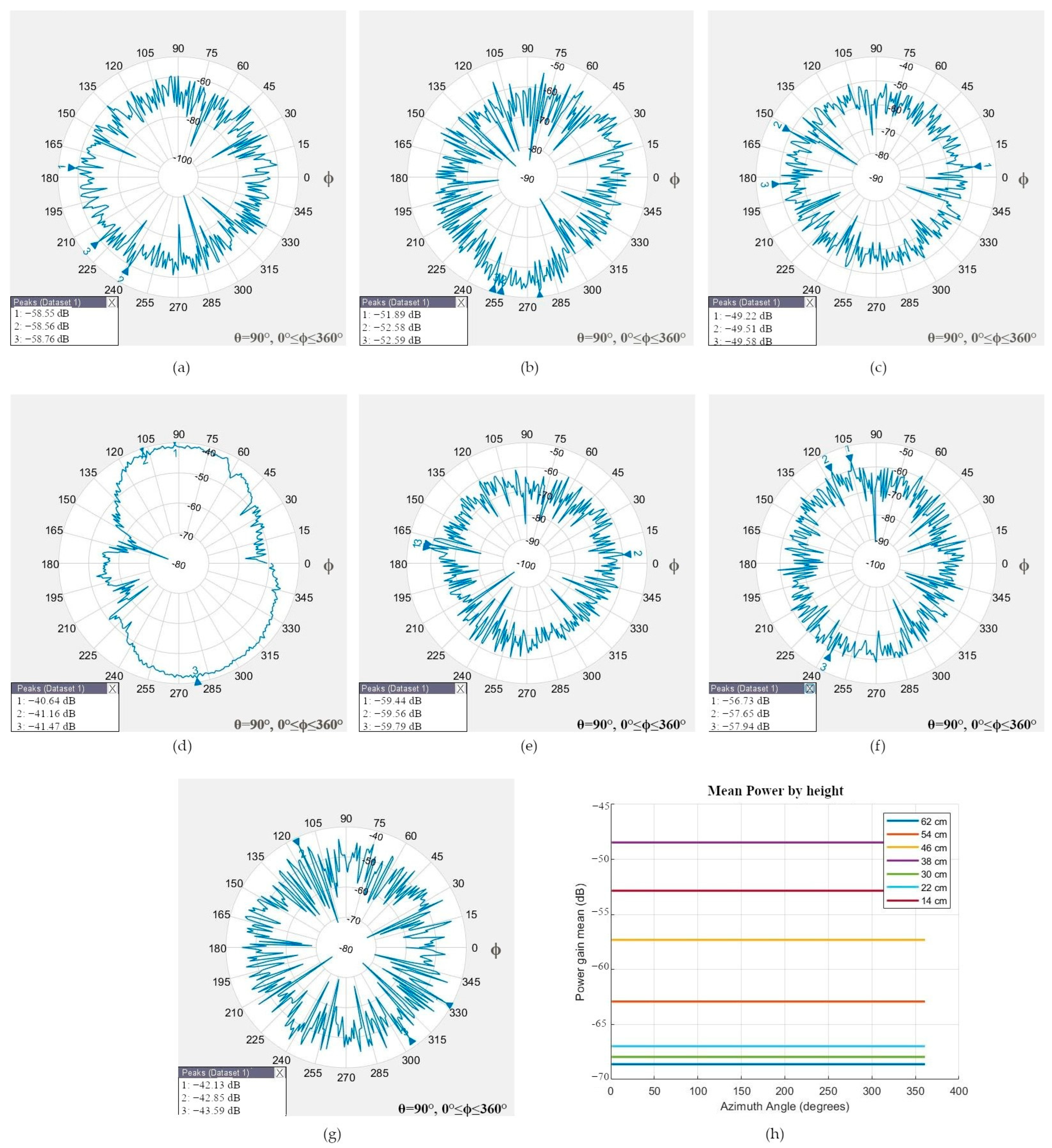
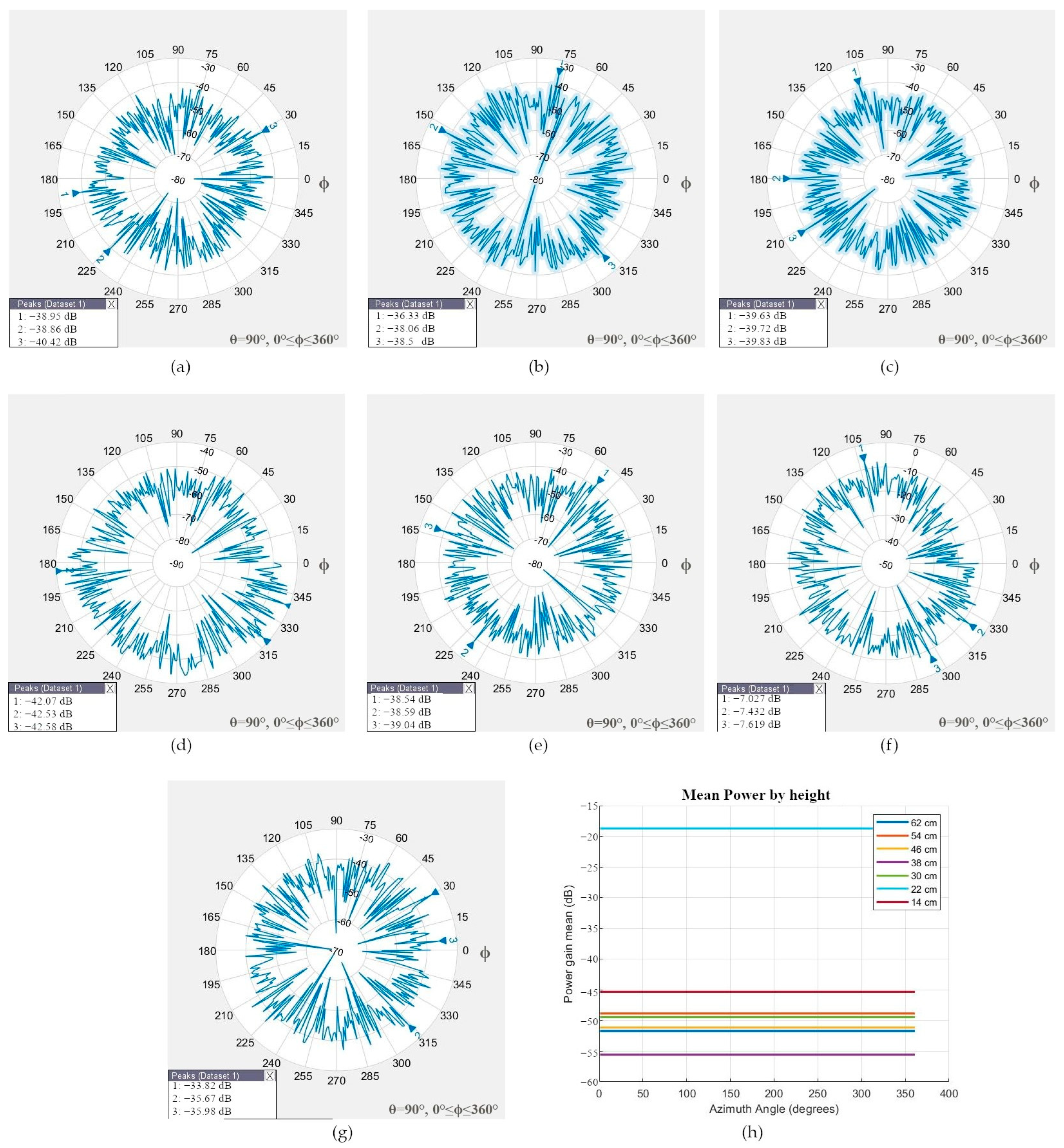
4.1. Pattern Radiation of GNSS L1/L5 Antenna
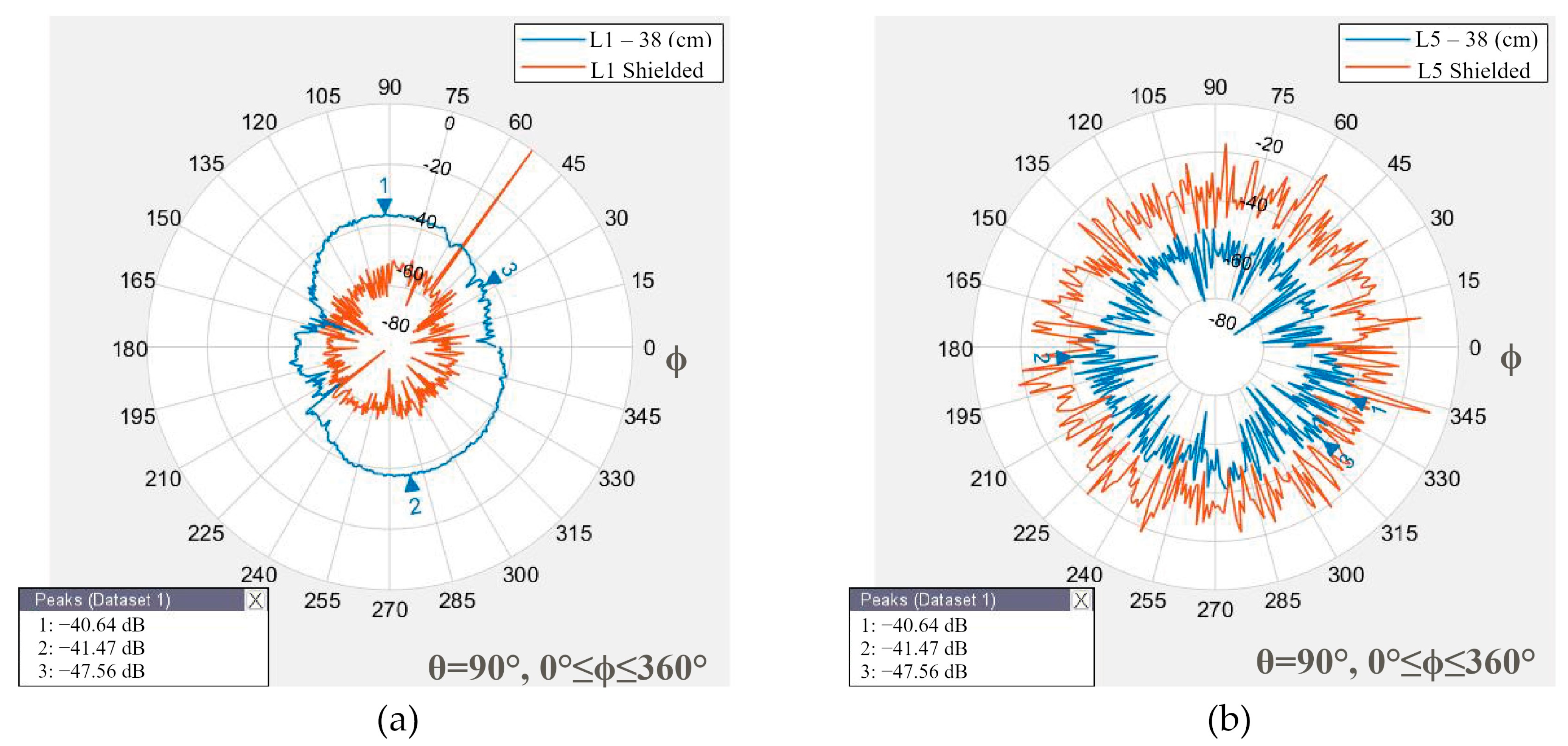
4.2. Pattern Radiation Measurement Using a Metal as a Shield
4.3. Power Received on L1 GNSS Antenna
- = gain of the transmitting antenna [dB];
- = gain of the receiving antenna [dB];
- = received power [dBW];
- = transmitted power [W];
- = satellite/receiver distance [m];
- = operating wavelength [m]; the term is called the free-space loss factor.
- ;
- ;
- ;
- .
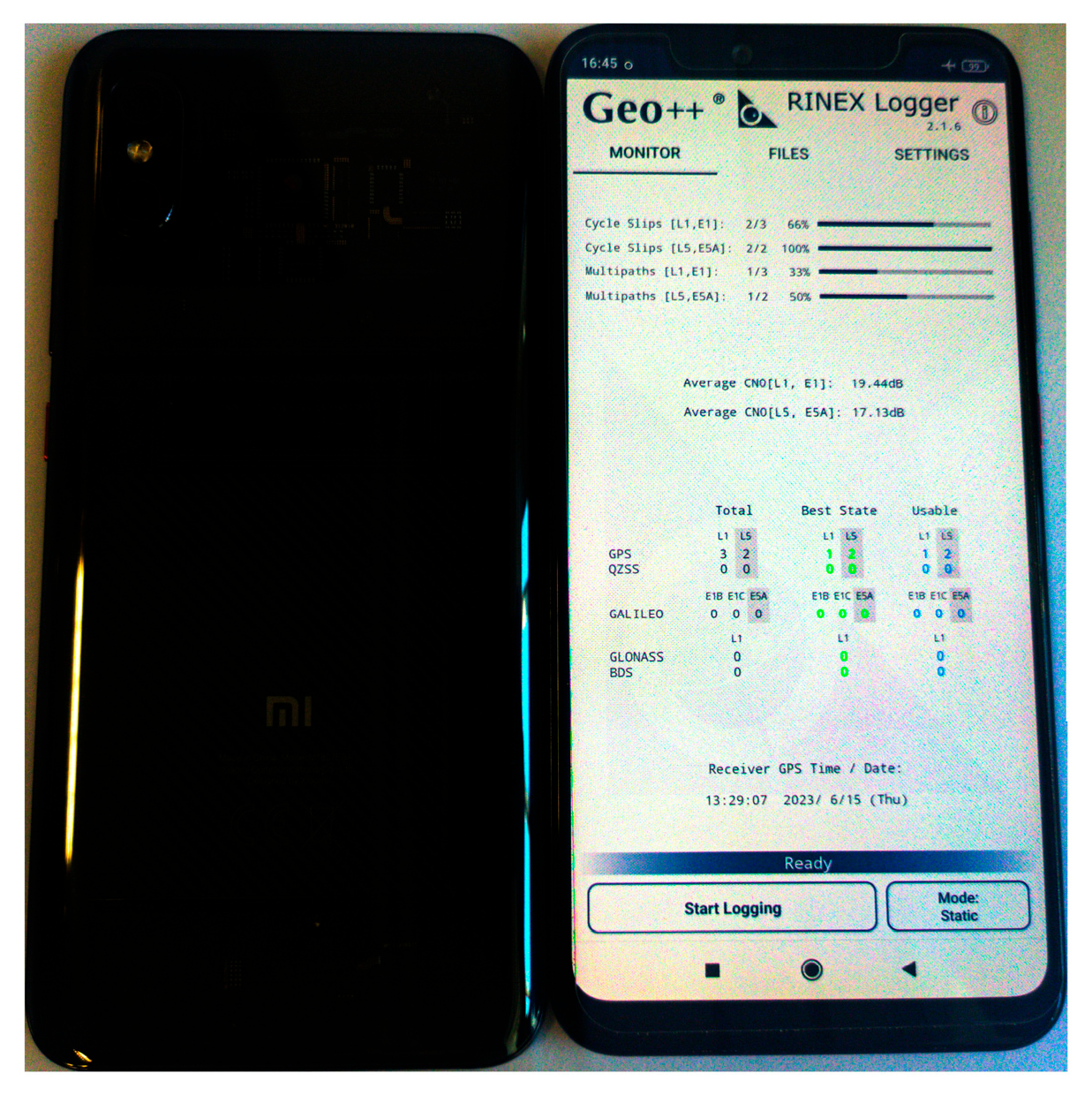
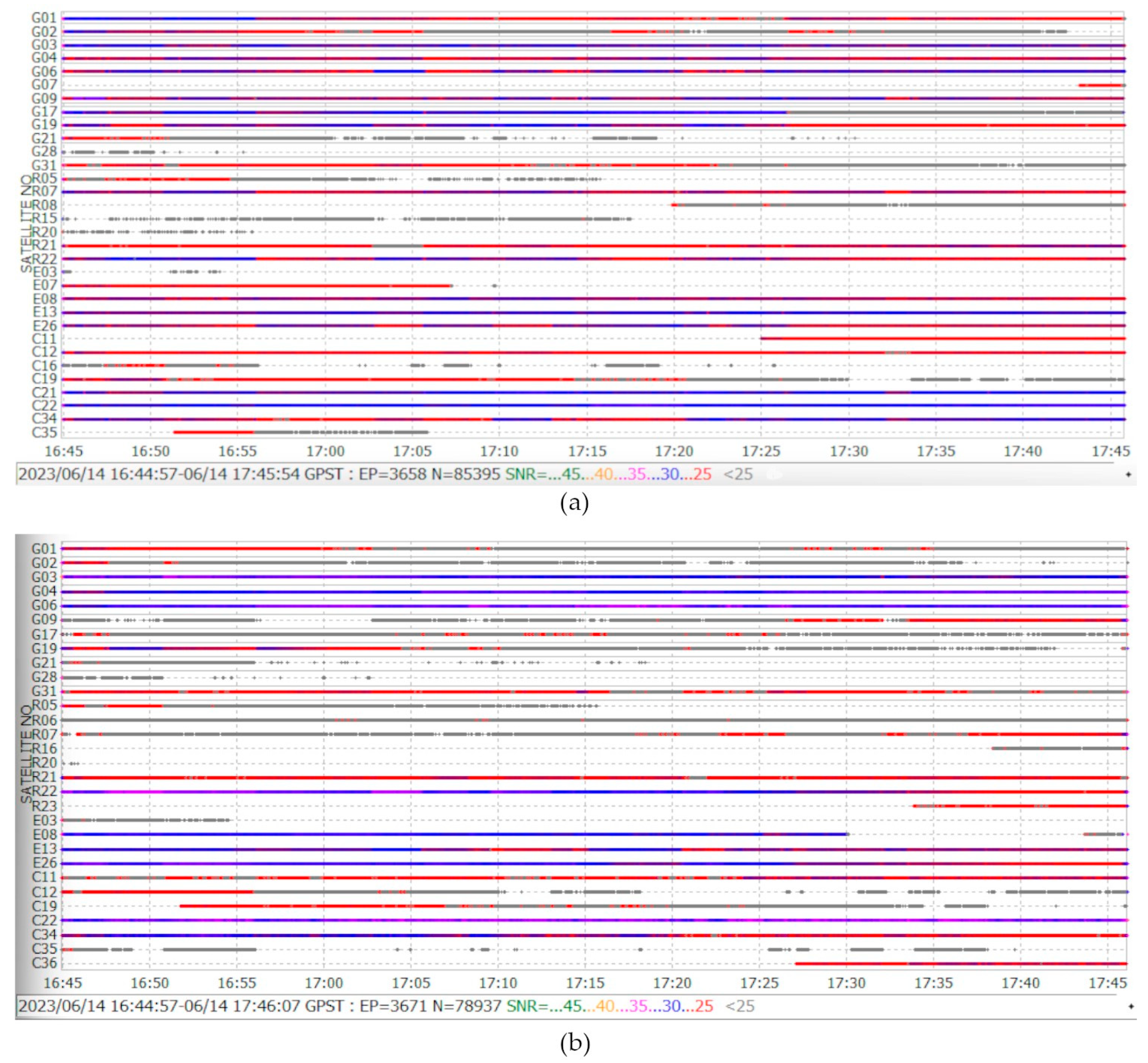
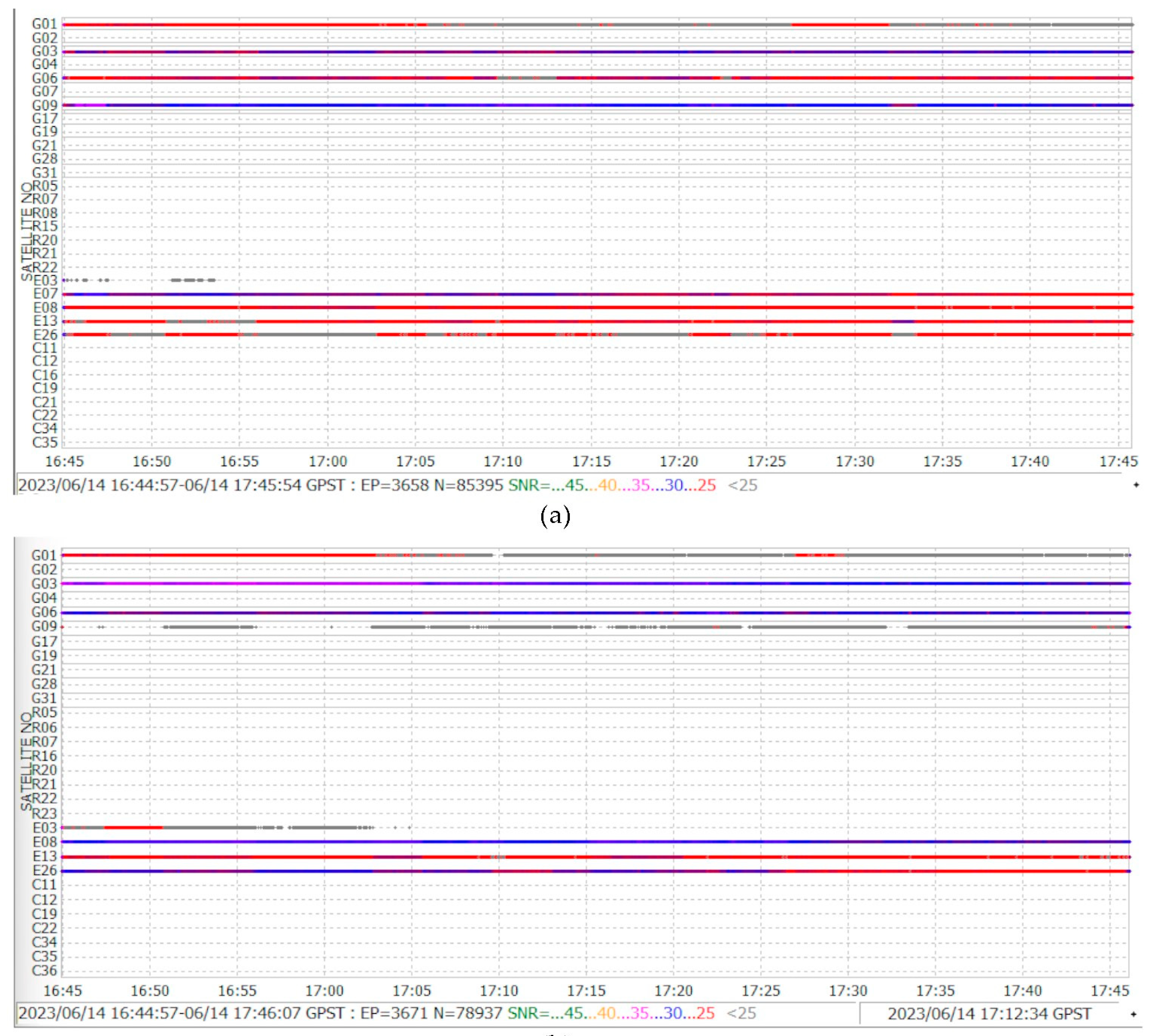
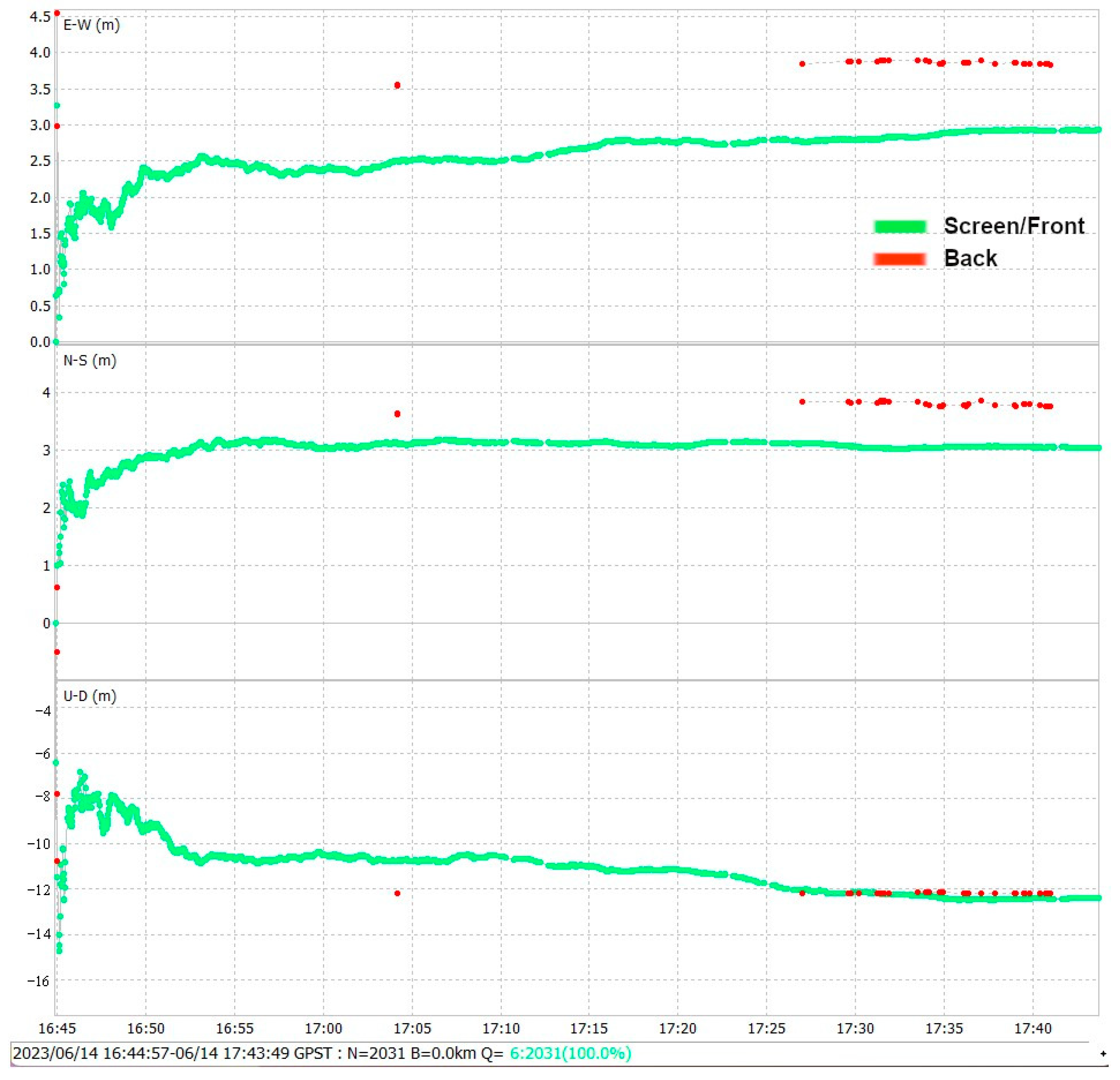
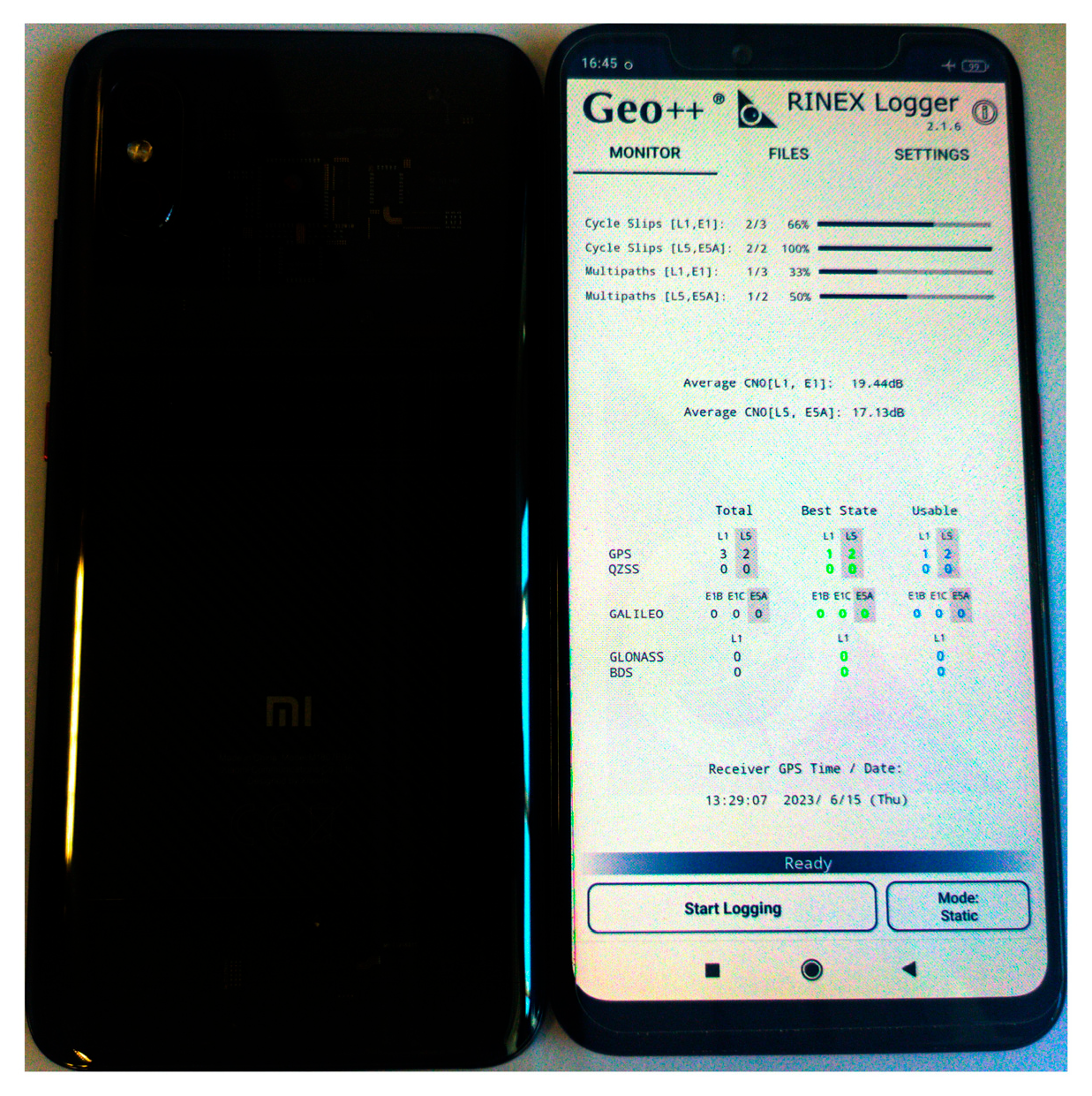
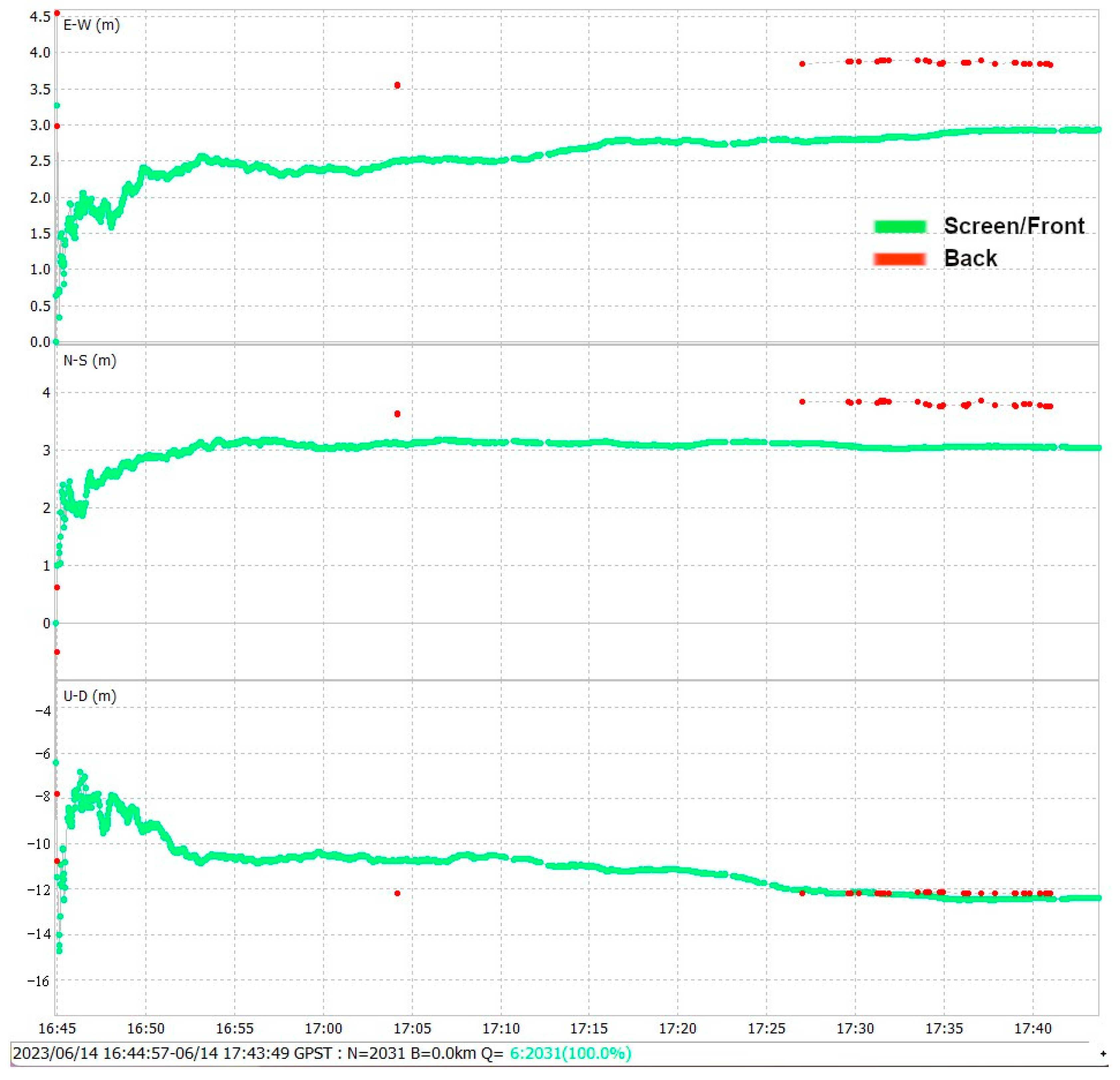
4.4. Screen/Back Satellite Visibility
4.5. Key Features of the the Xiaomi Mi 8 GNSS Antenna
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| List of acronyms | |
| ANTEX | ANTenna EXchange |
| APC | Antenna Phase Center |
| AR | Ambiguity Resolution |
| ARP | Antenna Reference Point |
| BDS | BeiDou |
| BLE | Bluetooth Low Energy |
| CDMA | Code Division Multiple Access |
| DGPS | Differential GPS |
| ENU | East, North, Up |
| GAL | Galileo |
| GLONASS | GLObalnaya NAvigatsionnaya Sputnikovaya Sistema |
| GNSS | Global Navigation Satellite System |
| GPS | Global Navigation Satellite System |
| GSM | Global System for Mobile Communications |
| HSPA | High-Speed Packet Access |
| IGS | International GNSS Service |
| L1 GPS C/A | L1 GPS Coarse/Acquisition Code |
| LTE | Long Term Evolution |
| PCB | Printed Circuit Board |
| PCO | Phase Centre Offset |
| PCV | Antenna Phase Center Variation |
| PIFA | Planar Inverted-F Antenna |
| PPG | Peak Power Gain |
| PPP | Precise Point Positioning |
| QZSS | Quasi-Zenith Satellite System |
| RF | Radio Frequency |
| RHCP | Right-Hand Circular Polarization |
| RMS | Root Mean Square |
| RTK | Real-Time Kinematic |
| SMA | SubMiniature version A |
| SNR | Signal-to-Noise Ratio |
| UTP | Unshielded Twister-Pair |
| VNA | Vector Network Analyzer |
| VRS | Virtual Reference Station |
| Wi-Fi | Wireless Fidelity |
| DLNA | Digital Living Network Alliance |
| WLAN | Wireless Local Area Network |
References
- El-Rabbany, A. Introduction to GPS: The Global Positioning System; Artech House Mobile Communications Series: Boston, MA, USA; pp. 27–41.
- El-Diasty, M.; Elsobeiey, M. Precise Point Positioning Technique with IGS Real-Time Service (RTS) for Maritime Applications. Positioning 2015, 6, 71–80. [Google Scholar] [CrossRef]
- European Union Agency for Space Program. World’s First Dual-Frequency GNSS Smartphone Hits the Market. In World’s First Dual-Frequency GNSS Smartphone Hits the Market. Available online: https://www.euspa.europa.eu/newsroom/news/world-s-first-dual-frequency-gnss-smartphone-hits-market (accessed on 11 March 2024).
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling High Accuracy Dynamic Applications in Urban Environments Using PPP and RTK on Android Multi-Frequency and Multi-GNSS Smartphones. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–9. [Google Scholar]
- European GNSS Supervisory Authority. Using GNSS Raw Measurements on Android Devices: White Paper; Publications Office: Luxembourg, 2017. [Google Scholar]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-Time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Gao, Y.; Ding, W.; Liu, F.; Gao, Y. An Improved Ambiguity Resolution Algorithm for Smartphone RTK Positioning. Sensors 2023, 23, 5292. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Jiao, F.; Li, J. The Assessment of GNSS Measurements from Android Smartphones. In China Satellite Navigation Conference (CSNC) 2018 Proceedings, Harbin, China, 23–25 May 2018; Sun, J., Yang, C., Guo, S., Eds.; Springer: Singapore, 2018; pp. 147–157. [Google Scholar]
- Suzuki, T. Precise Position Estimation Using Smartphone Raw GNSS Data Based on Two-Step Optimization. Sensors 2023, 23, 1205. [Google Scholar] [CrossRef]
- Antennas. Available online: https://gssc.esa.int/navipedia/index.php/Antennas (accessed on 11 March 2024).
- Seeber, G. Satellite Geodesy; Walter de Gruyter: Berlin, Germany, 2003; ISBN 3-11-017549-5. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems. GPS, GLONASS, Galileo, and More; Springer: Wien, Austria; New York, NY, USA, 2008; pp. 148–158. [Google Scholar]
- EL-Hattab, A.I. Influence of GPS Antenna Phase Center Variation on Precise Positioning. NRIAG J. Astron. Geophys. 2013, 2, 272–277. [Google Scholar] [CrossRef]
- Subirana, J.S.; Hernandez-Pajares, M.; Zornoza, J.M.J. GNSS Data Processing, Vol I: Fundamentals and Algorithms; European Space Agency: Noordwijk, The Netherlands, 2013; ISBN 978-92-9221-886-7. [Google Scholar]
- Netthonglang, C.; Thongtan, T.; Satirapod, C. GNSS Precise Positioning Determinations Using Smartphones. In Proceedings of the IEEE Asia Pacific Conference on Circuits and Systems, Bangkok, Thailand, 11–14 November 2019; ISBN 978-1-72812-940-2. [Google Scholar]
- Bochkati, M.; Sharma, H.; Lichtenberger, C.A.; Pany, T. Demonstration of Fused RTK (Fixed)+ Inertial Positioning Using Android Smartphone Sensors Only. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; ISBN 978-1-7281-0244-3. [Google Scholar]
- Geo++ Geo++ Rinex Logger. Available online: https://www.geopp.de/ (accessed on 8 June 2023).
- Wanninger, L.; Heßelbarth, A. GNSS Code and Carrier Phase Observations of a Huawei P30 Smartphone: Quality Assessment and Centimeter-Accurate Positioning. GPS Solut. 2020, 24, 64. [Google Scholar] [CrossRef]
- Darugna, F. Improving Smartphone-Based GNSS Positioning Using State Space Augmentation Techniques. Ph.D. Thesis, Leibniz University, Hanover, Germany, 2021. [Google Scholar]
- Dabove, P.; Di Pietra, V. Towards High Accuracy GNSS Real-Time Positioning with Smartphones. Adv. Space Res. 2019, 63, 94–102. [Google Scholar] [CrossRef]
- Balanis, C.A. Antenna Theory Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Xiaomi Mi 8 Specs|Xiaomi UK–Xiaomi UK. Available online: https://www.mi.com/uk/mi8/specs/ (accessed on 21 April 2023).
- Broadcom. BCM4775X GNSS Receiver with Integrated Sensor Hub Product Brief. Available online: https://docs.broadcom.com/doc/12379501 (accessed on 1 May 2023).
- Haddrell, T.; Phocas, M.; Ricquier, N. Innovation: Mobile-phone GPS antennas. Can They Be Better? GPS World 2010, 2, 29–35. [Google Scholar]
- Keysight Technologies. E5071C ENA Vector Network Analyzer, E5092A Configurable Multiport Test Set. Available online: https://www.keysight.com/us/en/product/E5080B/e5080b-ena-vector-network-analyzer.html?jmpid=zzfinde5080b (accessed on 21 April 2023).
- Suárez Chávez, M.J.; Sarmiento López, E.M. Determinación de Un Modelo de Propagación Empírico Para Establecer Las Pérdidas de Propagación En Una Cámara Anecoica; Escuela Superior Politécnica de Chimborazo: Riobamba, Ecuador, 2019. [Google Scholar]
- Ortega Chávez, K.L. Implementación de Un Sistema de Caracterización Del Patrón de Radiación de Antenas En Las Bandas L, S, y C a Través de Un Módulo DAQ; Escuela Superior Politécnica de Chimborazo: Riobamba, Ecuador, 2019; pp. 35–40. [Google Scholar]
- Jiménez, E.S.R. Diseño e Implementación de Un Sistema de Medición Para Obtener El Patrón de Radiación de Antenas Utilizando Un Analizador de Redes Vectoriales; Escuela Superior Politécnica de Chimborazo: Riobamba, Ecuador, 2023. [Google Scholar]
- Becker, D.-I.M.; Becker, M.; Zeimetz, P.; Schönemann, E. Anechoic Chamber Calibrations of Phase Center Variations for New and Existing GNSS Signals and Potential Impacts. In Proceedings of the IGS, Newcastle upon Tyne, UK, 28 June–2 July 2010. [Google Scholar]
- Görres, B.; Campbell, J.; Becker, M.; Siemes, M. Absolute Calibration of GPS Antennas: Laboratory Results and Comparison with Field and Robot Techniques. GPS Solut. 2006, 10, 136–145. [Google Scholar] [CrossRef]
- Arduisimple Calibrated Survey GNSS Tripleband + L-Band Antenna (IP67). Available online: https://www.ardusimple.com/product/calibrated-survey-gnss-quadband-antenna-ip67/ (accessed on 21 April 2023).
- Zimmermann, F.; Kuhlmann, H.; Voelksen, C. GNSS Antenna Calibration with Anechoic Chamber. IGS AC Workshop 2019, 6, 16–17. [Google Scholar]
- Anthony, F.; Nicholas, D. NAVSTAR GPS Space Segment/Navigation User Interfaces IS-GPS-200; Space and Missile System Center-LAAFB: El Segundo, CA, USA, 2021; p. 16. [Google Scholar]
- Anthony, T. Navstar GPS Space Segment/User Segment L5 Interfaces IS-GPS-705; PNT Technical Director, MilComm & PNT Directorate; Space Systems Command (SSC): El Segundo, CA, USA, 2022; pp. 10–11. [Google Scholar]
- European Union. European GNSS (Galileo) Open Service Signal-in-Space Interface Control Document; Programme Reference Documents Section of the European GNSS Service Centre (GSC) Web Portal; European GNSS Service Centre (GSC): Madrid, Spain, 2021. [Google Scholar]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Signal In Space Interface Control Document Open Service Signal B1I (Version 3.0); China Satellite Navigation Office: Nanchang, China, 2019; p. 5. [Google Scholar]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Signal In Space Interface Control Document Open Service Signal B2a (Version 1.0); China Satellite Navigation Office: Nanchang, China, 2017; pp. 7–8. [Google Scholar]
- GOST 32454-2013; GLObal Navigation Satellite System. Parameters of the Radionavigation Field. Technical Requirements and Testing Techniques, Open Service Performance Standard (OS PS) Edition 2.2. Russian Space Systems Website: Russia, 2020; p. 18.
- Steigenberger, P.; Thoelert, S.; Montenbruck, O. GPS and GLONASS Satellite Transmit Power: Update for IGS Repro3; IGS Analysis Center Coordinator: Weilheim, Germany, 2019. [Google Scholar]
- Tomoji, T. RTKlib. Available online: https://rtklib.com/ (accessed on 8 June 2023).
- Federal Communicacions Commission FCC ID. Available online: https://www.fcc.gov/oet/ea/fccid (accessed on 1 May 2023).
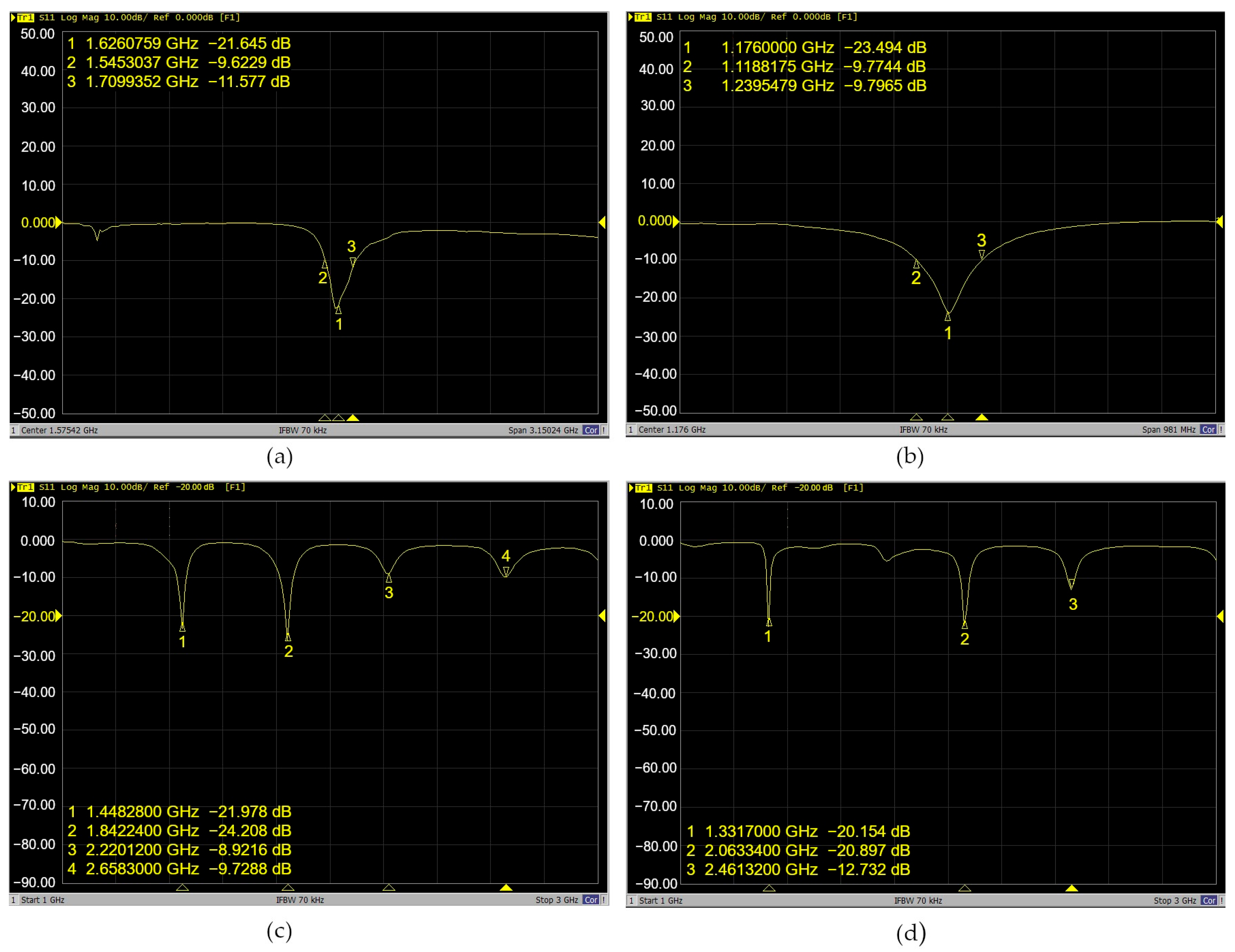









| Frequency Operation [GHz] | Wireless Technology | |
|---|---|---|
| Antenna 1 | 1.54 | (GPS + GLONASS + GALILEO + BDS) L1 |
| Antenna 2 | 1.176 | (GPS + GALILEO + BDS) L5 |
| Antenna 3 and 4 | 1.33, 2.06, and 2.46 | WLAN Wi-Fi 802.11 a/b/g/n/ac, dual-band, Wi-Fi Direct DLNA GSM/CDMA/HSPA/LTE |
| Height [cm] | L1 Mean Power Gain [dB] | [degrees] | Main Lobe Location | L5 Mean Power Gain [dB] | [degrees] | Main Lobe Location |
|---|---|---|---|---|---|---|
| 38 | −484,635 | 92 | Screen | −555,689 | 340 | Back side |
| 62 | −686,180 | 176 | Screen | −516,968 | 189 | Screen |
| 54 | −629,142 | 278 | Back side | −488,439 | 79 | Back side |
| 46 | −573,056 | 7 | Back side | −511,407 | 108 | Left side |
| 30 | −679,524 | 173 | Screen | −494,319 | 53 | Back side |
| 22 | −669,780 | 105 | Left side | −187,130 | 103 | Left side |
| 14 | −528,533 | 332 | Back side | −453,221 | 31 | Back side |
| Mean Power Gain | |||
|---|---|---|---|
| Band | Unshielded [dB] | Shielded [dB] | |
| L1 | −484,635 | −56.3368 | −7.8733 |
| L5 | −555,689 | −4.6523 | −50.9166 |
| Characteristics | L1 | L5 | Units | |
|---|---|---|---|---|
| Mechanical location | Top left | Top left | N/A 1 | |
| Outline dimensions | 48 × 17 | 60 × 13 | mm | |
| Center frequency | 1575.42 | 1176 | MHz | |
| Bandwidth (under −10 dB return loss) | 164.63 | 120.73 | MHz | |
| Polarization | Lineal | Lineal | N/A | |
| Radiation pattern | Omnidirectional | Omnidirectional | N/A | |
| Directivity | Low | Low | N/A | |
| Power received 2 | −212.34 | N/A | dBW | |
| Major visibility number of satellites | Screen | Screen | N/A | |
| Major SNR | Screen | Screen | dB/Hz | |
| Maximum Antenna Gain 3 | At Zenith | −484,635 | −555,689 | dB |
| At 0° Elevation | −686,180 | −453,221 | dB | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zabala Haro, M.; Martín Furones, Á.; Anquela Julián, A.; Jiménez-Martínez, M.J. Comprehensive Analysis of Xiaomi Mi 8 GNSS Antenna Performance. Sensors 2024, 24, 2569. https://doi.org/10.3390/s24082569
Zabala Haro M, Martín Furones Á, Anquela Julián A, Jiménez-Martínez MJ. Comprehensive Analysis of Xiaomi Mi 8 GNSS Antenna Performance. Sensors. 2024; 24(8):2569. https://doi.org/10.3390/s24082569
Chicago/Turabian StyleZabala Haro, Mónica, Ángel Martín Furones, Ana Anquela Julián, and María Jesús Jiménez-Martínez. 2024. "Comprehensive Analysis of Xiaomi Mi 8 GNSS Antenna Performance" Sensors 24, no. 8: 2569. https://doi.org/10.3390/s24082569
APA StyleZabala Haro, M., Martín Furones, Á., Anquela Julián, A., & Jiménez-Martínez, M. J. (2024). Comprehensive Analysis of Xiaomi Mi 8 GNSS Antenna Performance. Sensors, 24(8), 2569. https://doi.org/10.3390/s24082569