
Variable-Parameter Impedance Control of Manipulator Based on RBFNN and Gradient Descent


Abstract
:1. Introduction
2. Modeling of Manipulator Dynamics
3. Controller Design
3.1. Introduction to Impedance Controllers
3.2. Impedance Controller Analysis
3.2.1. Effect of Impedance Parameters on System Performance
3.2.2. Force Steady-State Error
- (1)
- The effect of inner loop position control on the system is ignored;
- (2)
- When the end-effector of the manipulator is at the contact force on the surface of the object is zero;
- (3)
- The contact stiffness of the object is .
3.3. Inner Loop Position Controller Design
3.4. Variable Parameters Impedance Controller Design
4. Simulation Verification
4.1. Simulation Verification of Constant Impedance Control System
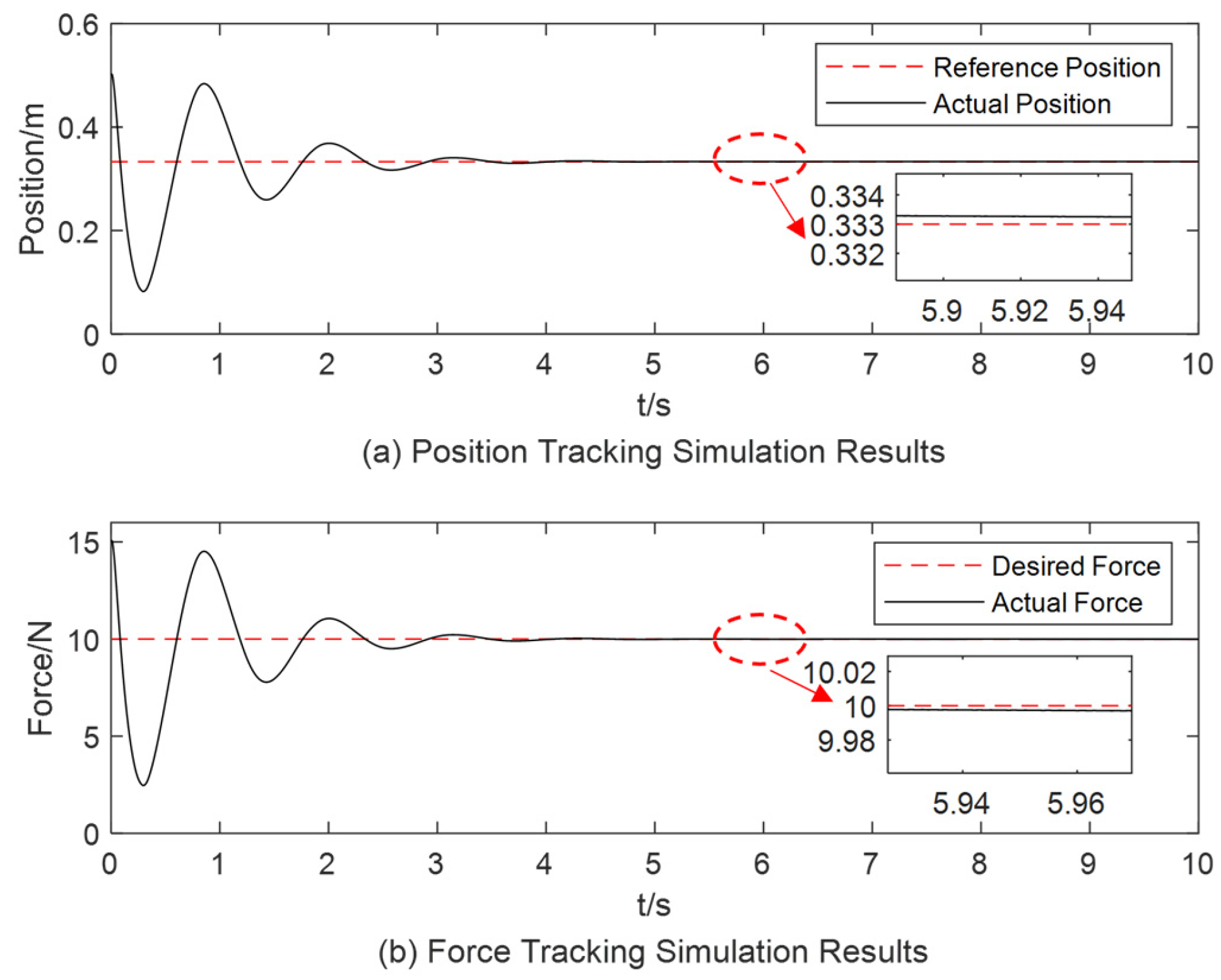
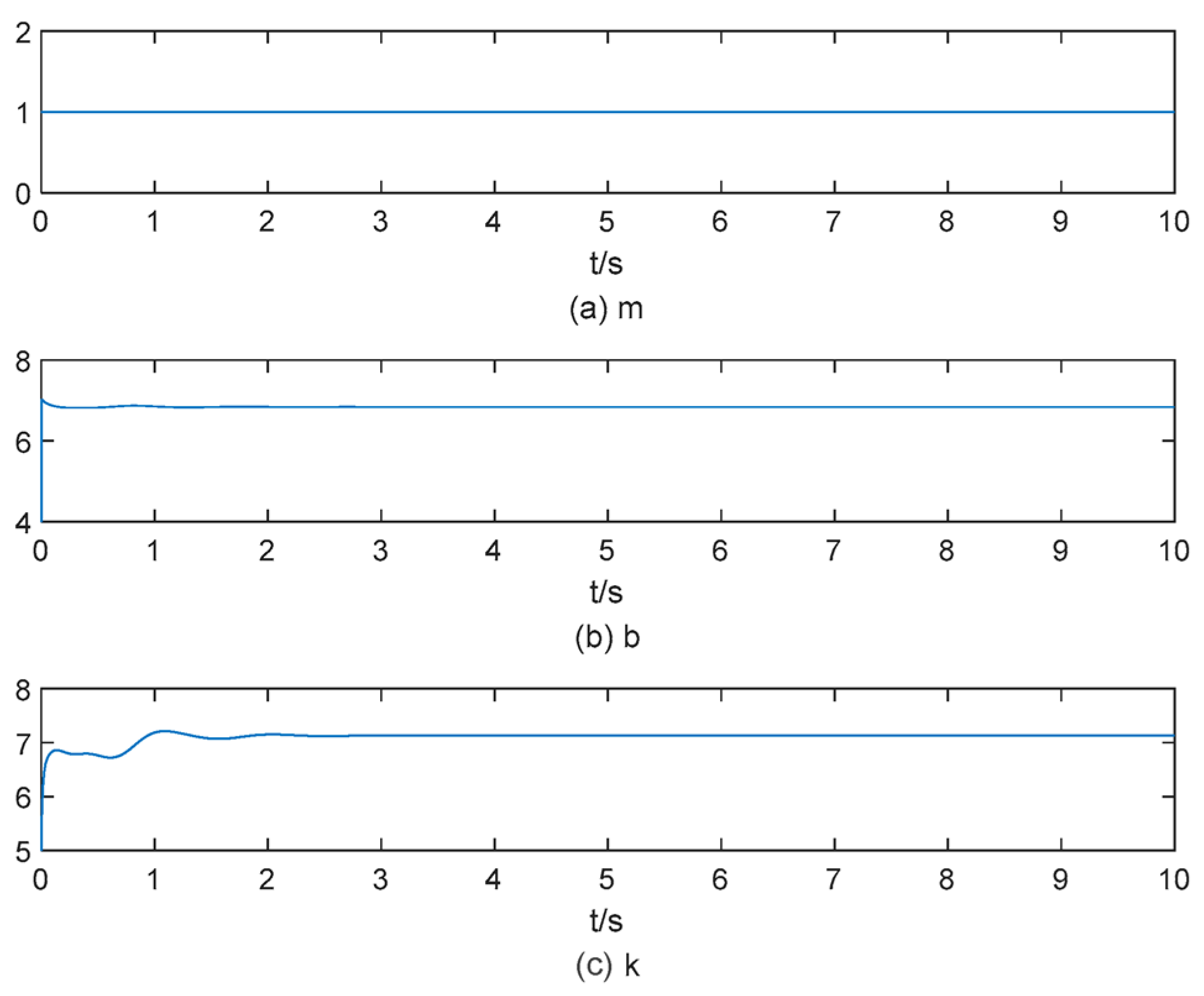
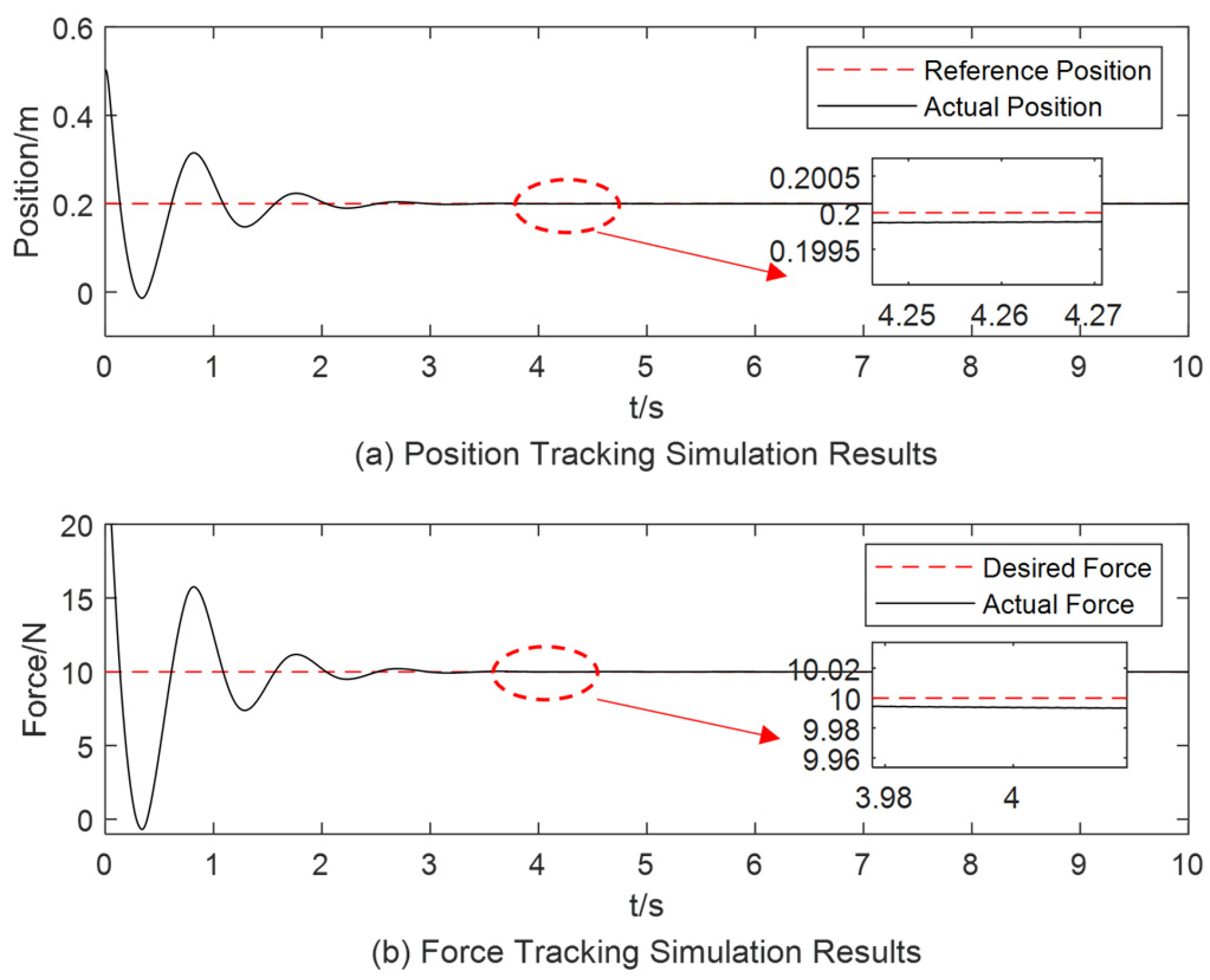
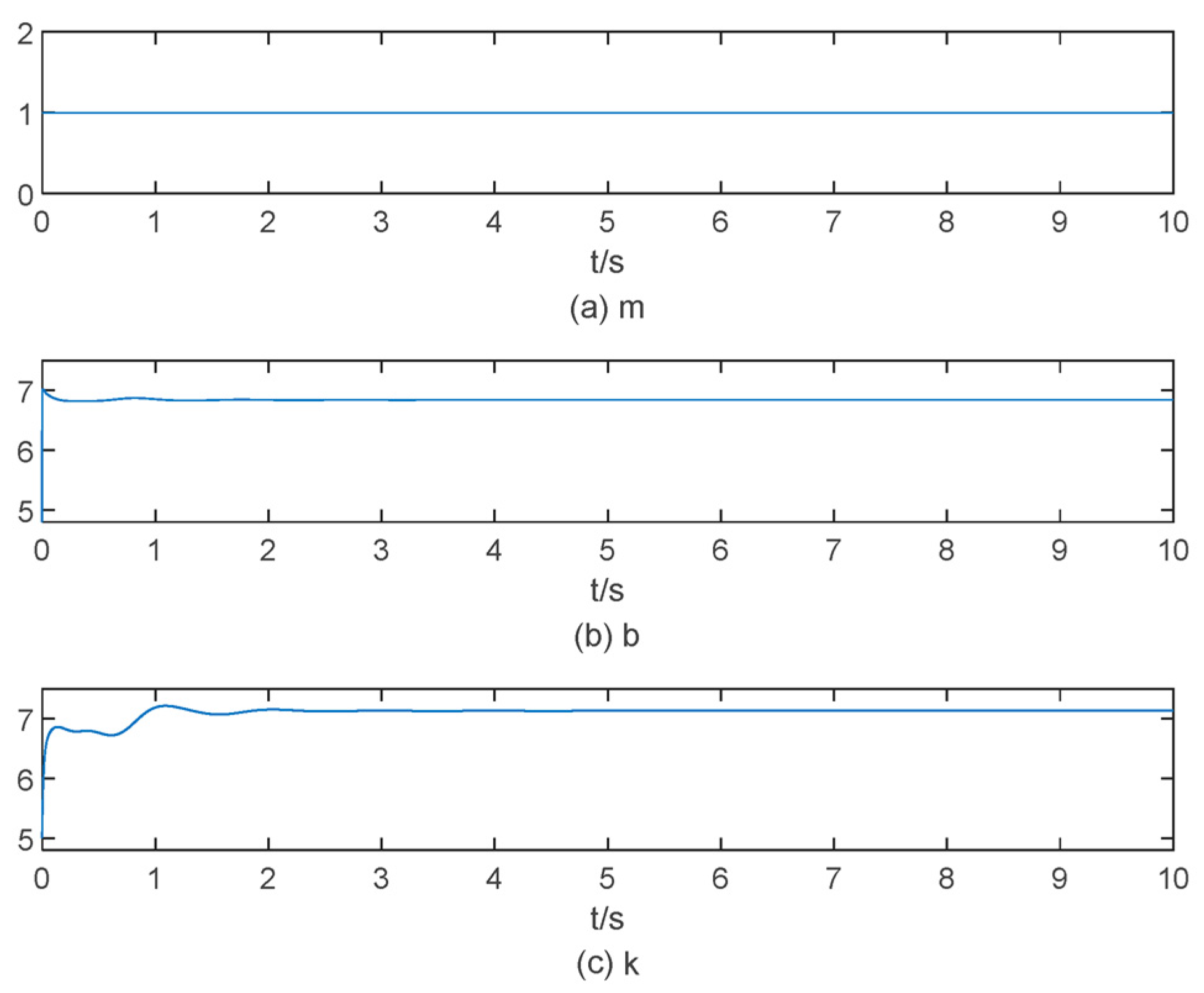
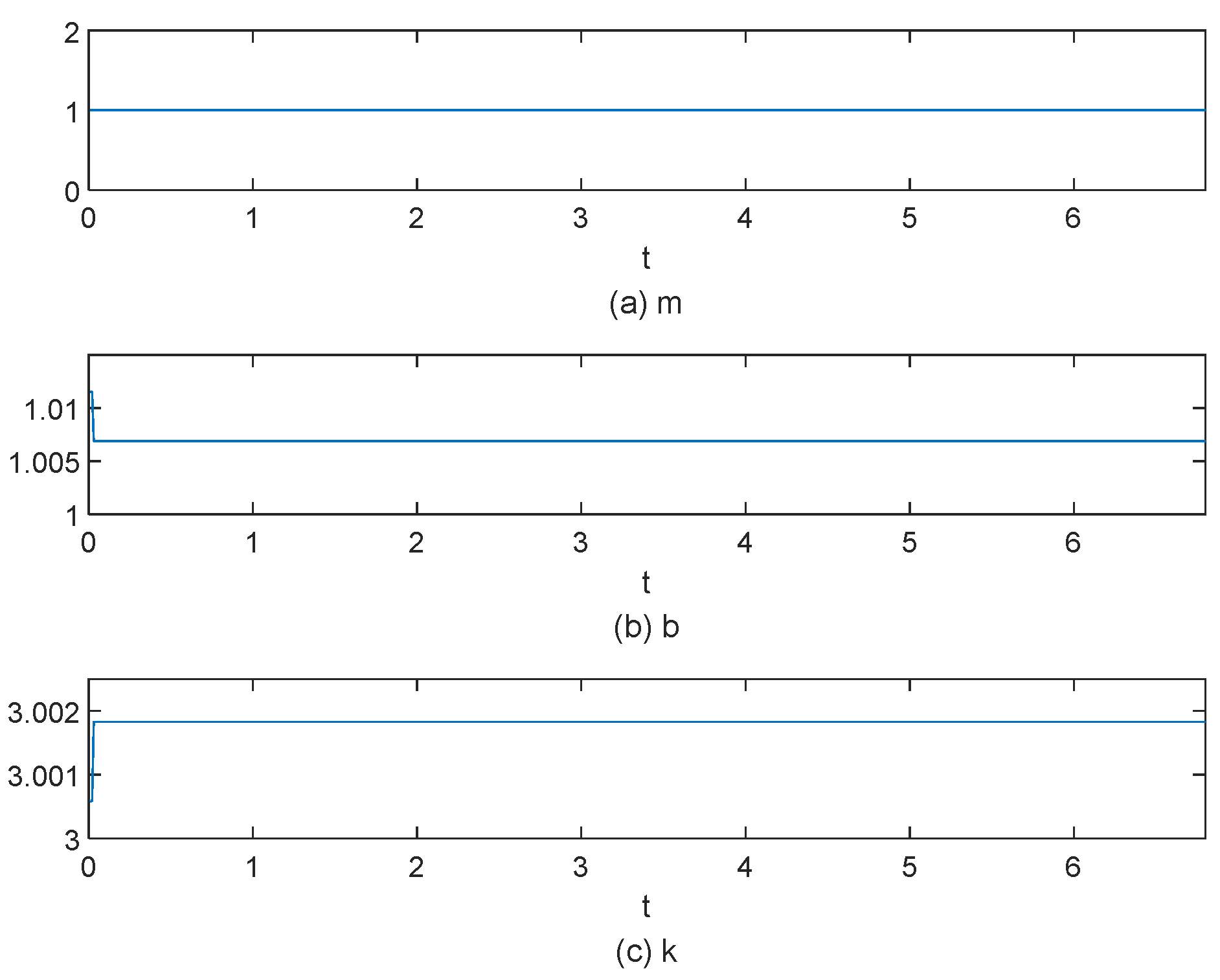
4.2. Simulation Validation of the Variable-Parameter Impedance Control Method
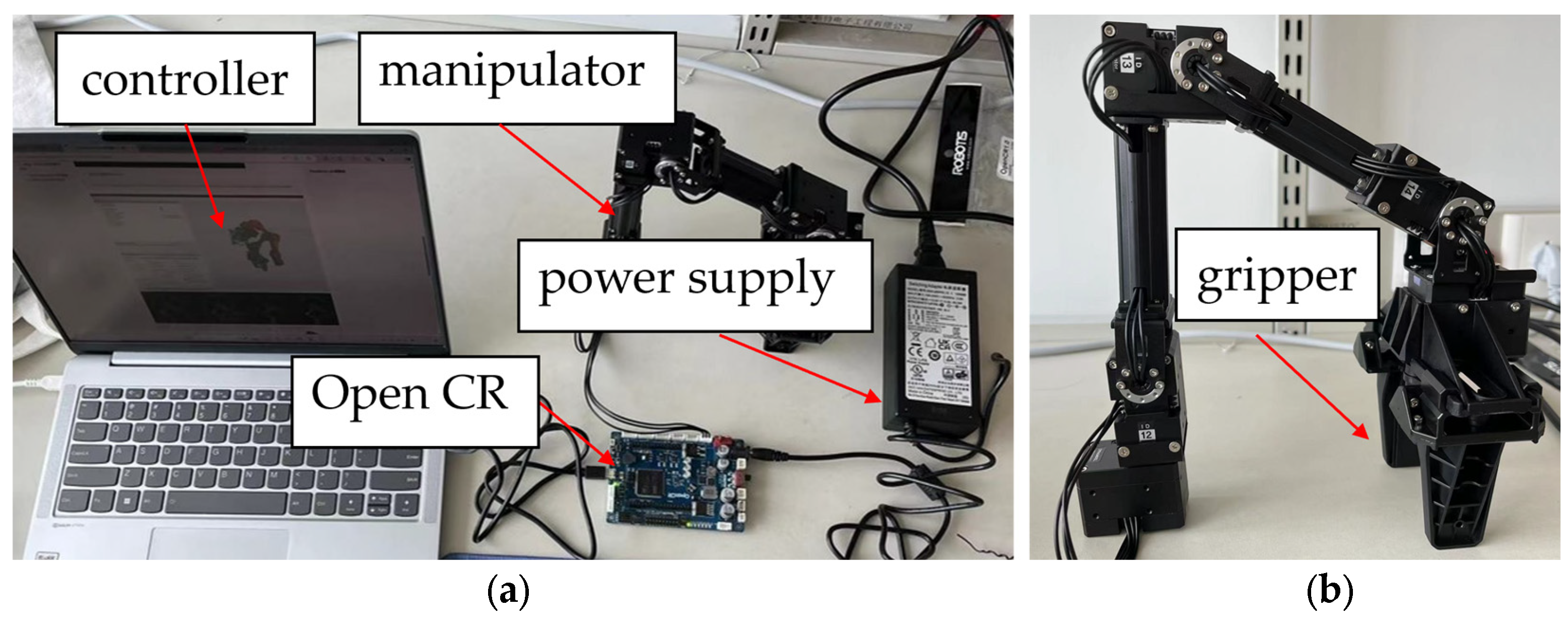
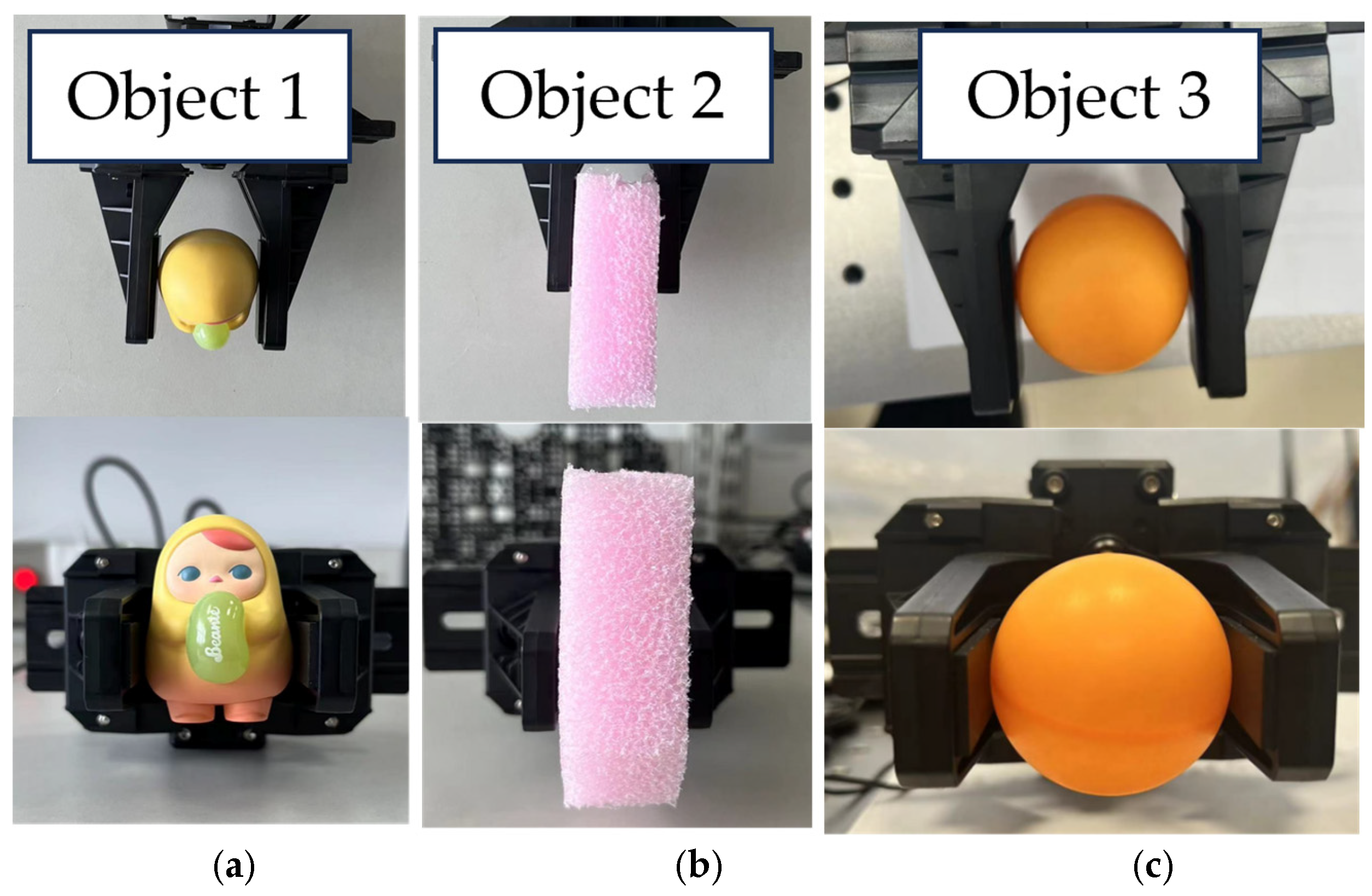
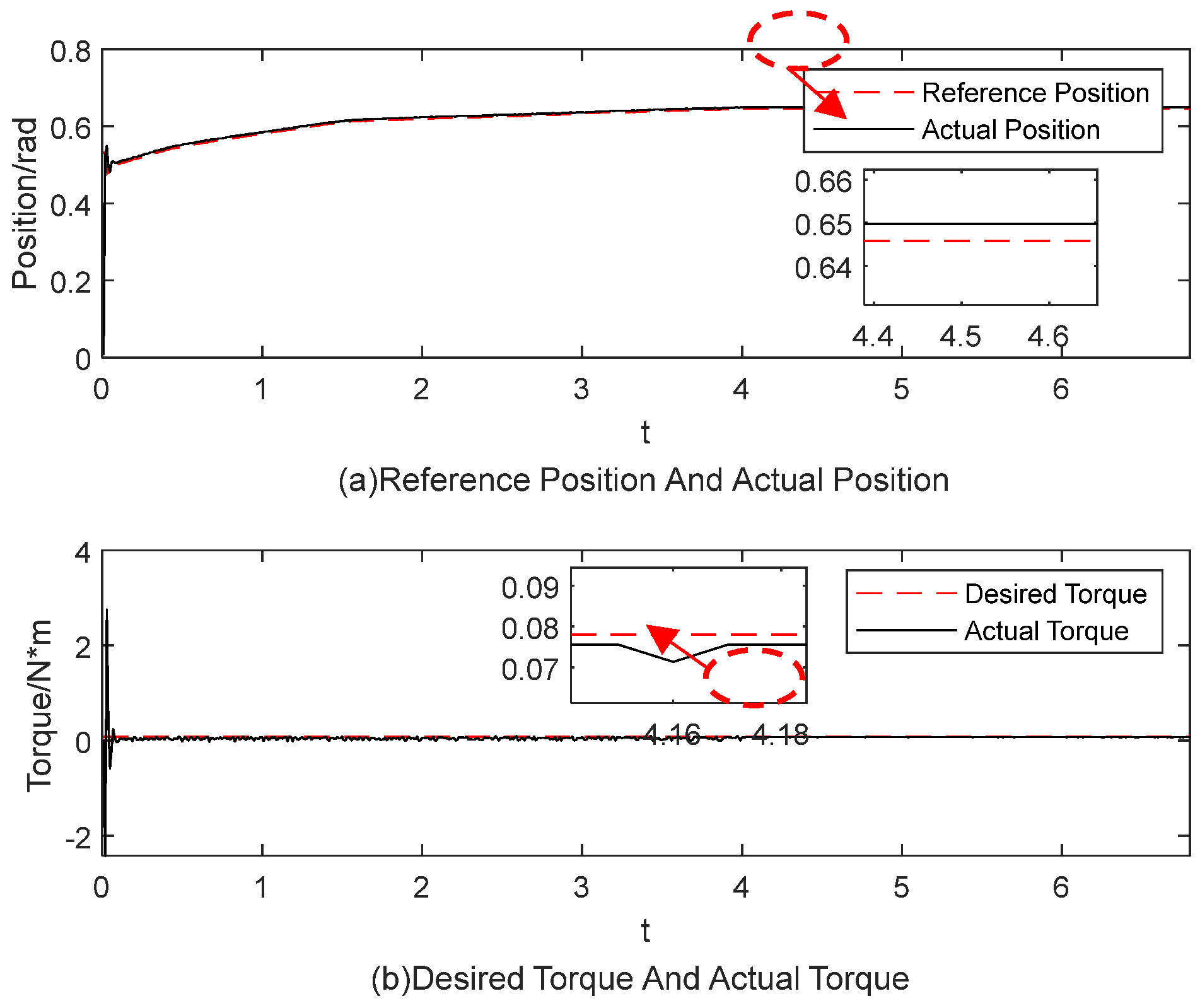
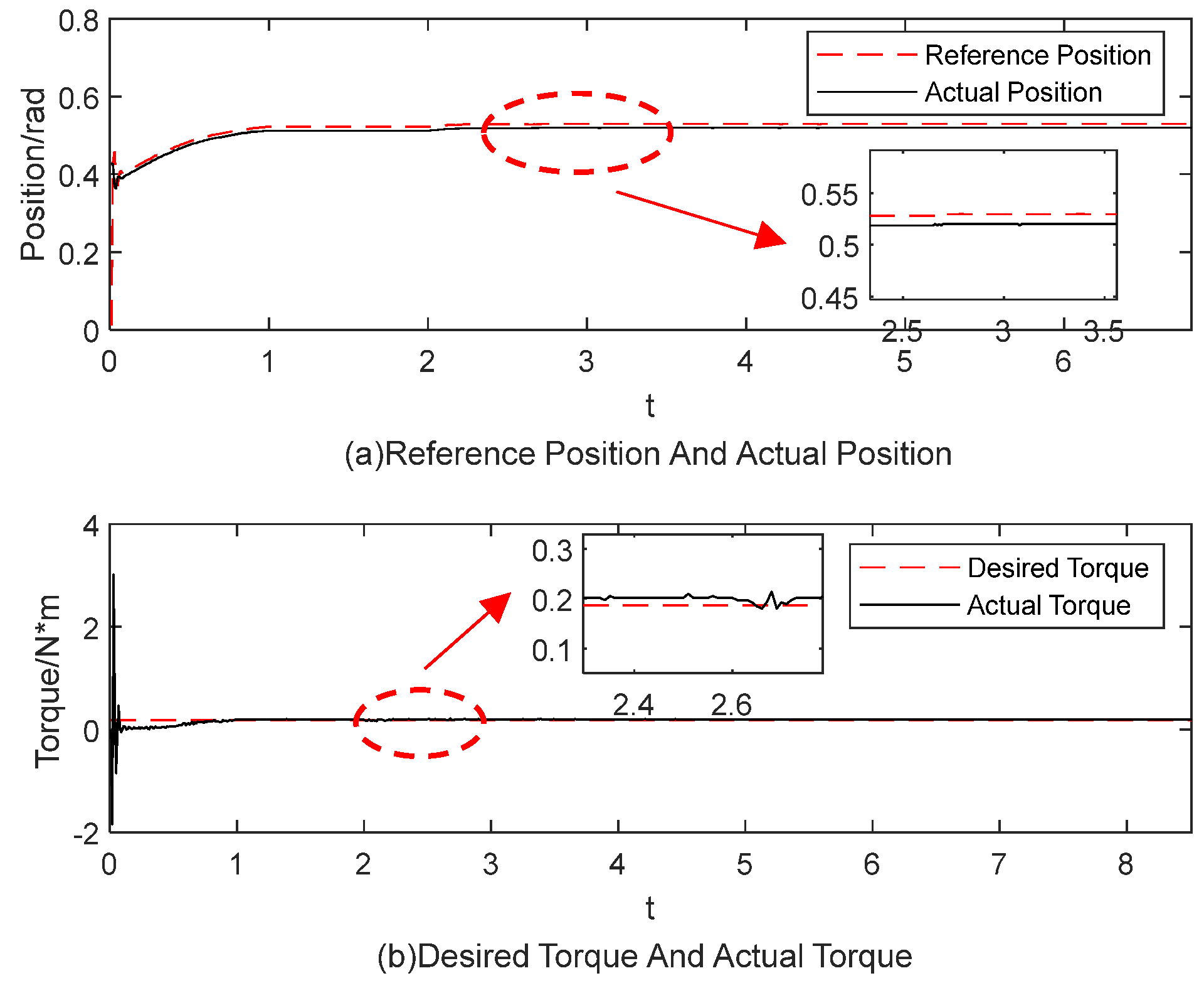
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, W.; Wang, K.; Zhao, C.; Tian, M. Compliant Control of Dual-Arm Robot in an Unknown Environment. In Proceedings of the 2022 7th International Conference on Control and Robotics Engineering (ICCRE), Beijing, China, 15–17 April 2022; pp. 5–9. [Google Scholar]
- Yang, G.; Wang, C. Review on Compliant Motion Control for Collaborative Robots. Autom. Panor. 2019, 2, 66–73. [Google Scholar]
- Song, P.; Yu, Y.; Zhang, X. Impedance Control of Robots: An Overview. In Proceedings of the 2017 2nd International Conference on Cybernetics, Robotics and Control (CRC), Chengdu, China, 21–23 July 2017; pp. 51–55. [Google Scholar]
- Ke, Y.; Li, J.; Huang, Z.; Li, S.; Li, G. Impedance control with new inner torque loop for compliant joints and its performance analysis. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6829–6834. [Google Scholar]
- Yang, B.; Zhai, D.-H.; Lyu, W.; Xia, Y. Event-based Hybrid Impedance and Admittance Control. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4596–4601. [Google Scholar]
- Zhang, Z.; Wu, W. Application of Impedance Control Based on Multi-Subgroup Improved Marine Predator Algorithm in Compliance Control of Robotic Arms. In Proceedings of the 2024 7th International Conference on Advanced Algorithms and Control Engineering (ICAACE), Shanghai, China, 1–3 March 2024; pp. 1243–1247. [Google Scholar]
- Hogan, N. Impedance Control: An Approach to Manipulation. In Proceedings of the 1984 American Control Conference, San Diego, CA, USA, 6–8 June 1984; pp. 304–313. [Google Scholar]
- Dietrich, A.; Ott, C. Hierarchical Impedance-Based Tracking Control of Kinematically Redundant Robots. IEEE Trans. Robot. 2019, 36, 204–221. [Google Scholar] [CrossRef]
- Khan, H.; Abbasi, S.J.; Salman, M.; Lee, M.C. Super Twisting Sliding Mode Control-Based Impedance Control for Robot Arm End-Effector Force Tracking. In Proceedings of the 2022 61st Annual Conference of the Society of Instrument and Control Engineers (SICE), Kumamoto, Japan, 6–9 September 2022; pp. 158–162. [Google Scholar]
- Wu, R.; Zhang, H.; Zhao, J. Robot Variable Impedance Skill Transfer and Learning Framework Based on a Simplified Human Arm Impedance Model. IEEE Access 2020, 8, 225627–225638. [Google Scholar] [CrossRef]
- Wimbock, T.; Ott, C.; Hirzinger, G. Impedance Behaviors for Two-handed Manipulation: Design and Experiments. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4182–4189. [Google Scholar]
- Li, D.-Y.; Xu, D.-G.; Gui, W.-H. Coordinated impedance control for dual-arm robots based on time delay estimation and adaptive fuzzy sliding mode controller. Control. Decis. 2021, 36, 1311–1323. [Google Scholar]
- Wang, X.; Zhang, Y.; Lu, C. Adaptive Impedance Control in Uncertain Environment for Uncertain Manipulator. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 3937–3942. [Google Scholar]
- Li, Z.; Liu, J.; Huang, Z.; Peng, Y.; Pu, H.; Ding, L. Adaptive Impedance Control of Human–Robot Cooperation Using Reinforcement Learning. IEEE Trans. Ind. Electron. 2017, 64, 8013–8022. [Google Scholar] [CrossRef]
- Liang, X.; Zhao, H.; Li, X.; Ding, H. Force tracking impedance control with unknown environment via an iterative learning algorithm. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 158–164. [Google Scholar]
- Patino, J.; Encalada-Davila, A.; Sampietro, J.; Tutiven, C.; Saldarriaga, C.; Kao, I. Damping Ratio Prediction for Redundant Cartesian Impedance-Controlled Robots Using Machine Learning Techniques. Mathematics 2023, 11, 1021. [Google Scholar] [CrossRef]
- Yi, D.; Wei, J.; Bo, X.; Dean, Z.; Lei, Z. Compliant Grasping Control for Apple Harvesting Robot End-effector. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 1208–1212. [Google Scholar]
- Gan, Y.-H.; Duan, J.-J.; Dai, X.-Z. Adaptive variable impedance control for robot force tracking in unstructured environment. Control. Decis. 2019, 34, 2134–2142. [Google Scholar]
- Zheng, S.; Guo, K.; Sun, J. Robot constant force grinding based on variable parameter impedance control. Manuf. Technol. Mach. Tool 2024, 9–15. [Google Scholar] [CrossRef]
- Lu, W.; Liu, H.; Zhu, X.; Wang, X.; Liang, B. Variable stiffness force tracking impedance control using differential-less method. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 4906–4911. [Google Scholar]
- Penco, L.; Hoffman, E.M.; Modugno, V.; Gomes, W.; Mouret, J.-B.; Ivaldi, S. Learning Robust Task Priorities and Gains for Control of Redundant Robots. IEEE Robot. Autom. Lett. 2020, 5, 2626–2633. [Google Scholar] [CrossRef]
- Wang, G.; Ma, D.; Liu, Y.; Liu, C. Research progress of contact force models in the collision mechanics of multibody system. Chin. J. Theor. Appl. Mech. 2022, 54, 3239–3266. [Google Scholar]
- Zang, Q.; Tian, L.; Hu, K.; Chen, W.F. Overview of robot force control. J. Nanjing Univ. Inf. Sci. Technol. 2022, 14, 744–754. [Google Scholar] [CrossRef]
- Wang, X.; Shao, H. The Theory of RBF Neural Network and Its Application in Control. Inf. Control. 1997, 26, 272–284. [Google Scholar]
- Wang, D.; Li, Y.; Yuan, T.; Zhou, S.; Wang, X.; Tian, W.; Liu, Z.; Miao, S.; Liu, J. Modeling Method for Robot Servo System Based on IGSA-RBFNN. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5587–5590. [Google Scholar]
- Zhou, X.; Wang, W.; Shi, Y. Identification Modeling Based on RBFNN for an Aerial Inertially Stabilized Platform. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 283–287. [Google Scholar]
- Kishore, D.R.; Prasad, S.R.; Sekhar, M.L.C.; Rahul, M. Developing an RBFNN Maximum Power Point Tracking Algorithm for a Three-Phase Landsman PV-Grid Connection. In Proceedings of the 2023 Fifth International Conference on Electrical, Computer and Communication Technologies (ICECCT), Erode, India, 22–24 February 2023; pp. 1–6. [Google Scholar]
- Zhu, P.; Jin, S.; Yin, C. RBFNN-Based Event-Triggered Data-Driven Formation Control for a Connected Heterogeneous Vehicle Platoon. In Proceedings of the 2024 IEEE 13th Data Driven Control and Learning Systems Conference (DDCLS), Kaifeng, China, 17–19 May 2024; pp. 121–126. [Google Scholar]
- Le, F.; Dong, S. Performance Improvements in Natural Gradient Descent Method. In Proceedings of the 2024 7th International Conference on Advanced Algorithms and Control Engineering (ICAACE), Shanghai, China, 1–3 March 2024; pp. 1089–1092. [Google Scholar]
- Lou, W.; Gao, W.; Han, X.; Zhang, Y. Variable Order Fractional Gradient Descent Method and Its Application in Neural Networks Optimization. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; pp. 109–114. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Hidden Layer Nodes | Initial Weighting | Nodal Center | Node Width | Learning Rate | Momentum Factor |
|---|---|---|---|---|---|
| 5 | 10 | 30 | 40 | 0.25 | 0.1 |
| Simulation 1 | Simulation 2 | Simulation 3 | |
| Desired force (N) | 10 | 10 | 10 |
| Force steady-state error (N) | 0.003 | 0.0047 | 0.003 |
| XM430-W350-T | |
|---|---|
| MCU | ARM CORTEX-M3 (72 [MHz], 32 Bit) |
| Position Sensor | Contactless absolute encoder (12 Bit, 360 [°]) Maker: ams, Part No:AS5045 |
| Motor | Coreless |
| Baud Rate | 9600 [bps]~4.5 [Mbps] |
| Weight | 82 [g] |
| Dimensions (W × H × D) | 28.5 × 46.5 × 34 [mm] |
| Input Voltage | 10.0~14.8 [V] (Recommended: 12.0 [V]) |
| Experiment 1 | Experiment 2 | Experiment 3 | |
|---|---|---|---|
| Desired torque (N·m) | 0.078 | 0.1872 | 0.1248 |
| Force steady-state error (N·m) | 0.0025 | 0.01 | 0.003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Wang, F.; Tang, H.; Liang, Y. Variable-Parameter Impedance Control of Manipulator Based on RBFNN and Gradient Descent. Sensors 2025, 25, 49. https://doi.org/10.3390/s25010049
Li L, Wang F, Tang H, Liang Y. Variable-Parameter Impedance Control of Manipulator Based on RBFNN and Gradient Descent. Sensors. 2025; 25(1):49. https://doi.org/10.3390/s25010049
Chicago/Turabian StyleLi, Linshen, Fan Wang, Huilin Tang, and Yanbing Liang. 2025. "Variable-Parameter Impedance Control of Manipulator Based on RBFNN and Gradient Descent" Sensors 25, no. 1: 49. https://doi.org/10.3390/s25010049
APA StyleLi, L., Wang, F., Tang, H., & Liang, Y. (2025). Variable-Parameter Impedance Control of Manipulator Based on RBFNN and Gradient Descent. Sensors, 25(1), 49. https://doi.org/10.3390/s25010049