
Cascade Sliding Mode Control for Linear Displacement Positioning of a Quadrotor

Abstract
1. Introduction
2. Quadrotor Model
- -
- , , , —lift forces generated by successive drone motors;
- -
- , , —forces acting in the three axes of the global reference system.

- -
- , , —projections of lift acting in the Z axis of the local system onto individual axes of the global system;
- -
- , —shortened notation: cosine and sine;
- -
- , , —three Euler angles: roll, pitch and yaw.
- -
- , , , —rotational speeds of the respective motors;
- -
- —torque resistance coefficient with respect to the Z axis;
- -
- —arm length;
- -
- , , —individual torques;
- -
- —the drag coefficient of the drone, which determines the ratio of the rotational speed of the motor to the force it generates determined by the formula .
- -
- , , —individual angular accelerations;
- -
- , , —individual angular velocities;
- -
- , , —moments of inertia around individual axes.
- -
- , , —individual linear accelerations;
- -
- —mass of the drone;
- -
- —acceleration due to gravity;
- -
- , , —dynamic resistance of motion in individual axes.
- -
- , , —linear velocities in individual axes;
- -
- , , —coefficients of dynamic drag in individual axes.
- -
- —maximum torque relative to the Y and X axis;
- -
- —maximum torque relative to the Z axis.
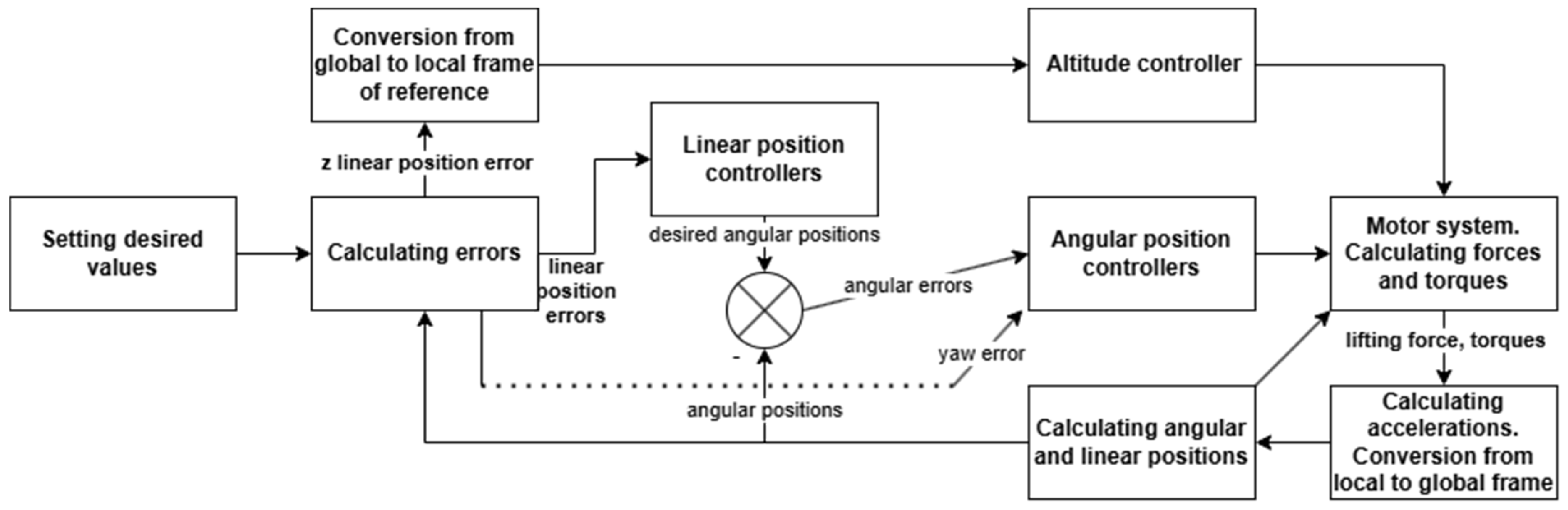
3. Implementation of the Classic Quadrotor Angular Positions Control System
4. Synthesis of Sliding Mode Controllers for a Quadrotor Angular Positioning System
- The reaching phase, during which the point representing the state of the object moves from the initial coordinates to a certain hyperplane, and the object is susceptible to disturbances and the influence of model imperfections.
- The sliding phase, in which the mentioned point moves in a hyperplane, trying to reduce error values to zero, and the object becomes robust. Reaching this phase means that the dynamics of the object are described only by the parameters of this hyperplane, and the order of the object is lowered.
- -
- —vector of desired angular positions—;
- -
- —vector of angular positions—;
- -
- —direction coefficients vector of the sliding variables for altitude control—[];
- -
- —vector of angular sliding variables—[, , ].
- -
- —matrix proposed to simplify the determination of the equivalent control vector.
- -
- —vector of gain of control signals—.
- -
- —Lyapunov function.
- -
- —sliding variable for control of the altitude of the drone;
- -
- —direction coefficient of the sliding variable in case of altitude control;
- -
- —error of linear position control in the Z axis.
- -
- —control signal of the linear position controller in the Z axis;
- -
- —signal of the equivalent part of the control;
- -
- —signal of the discontinuous part of the control.
- -
- —positive sliding variable coefficient.
- -
- —Lyapunov function.
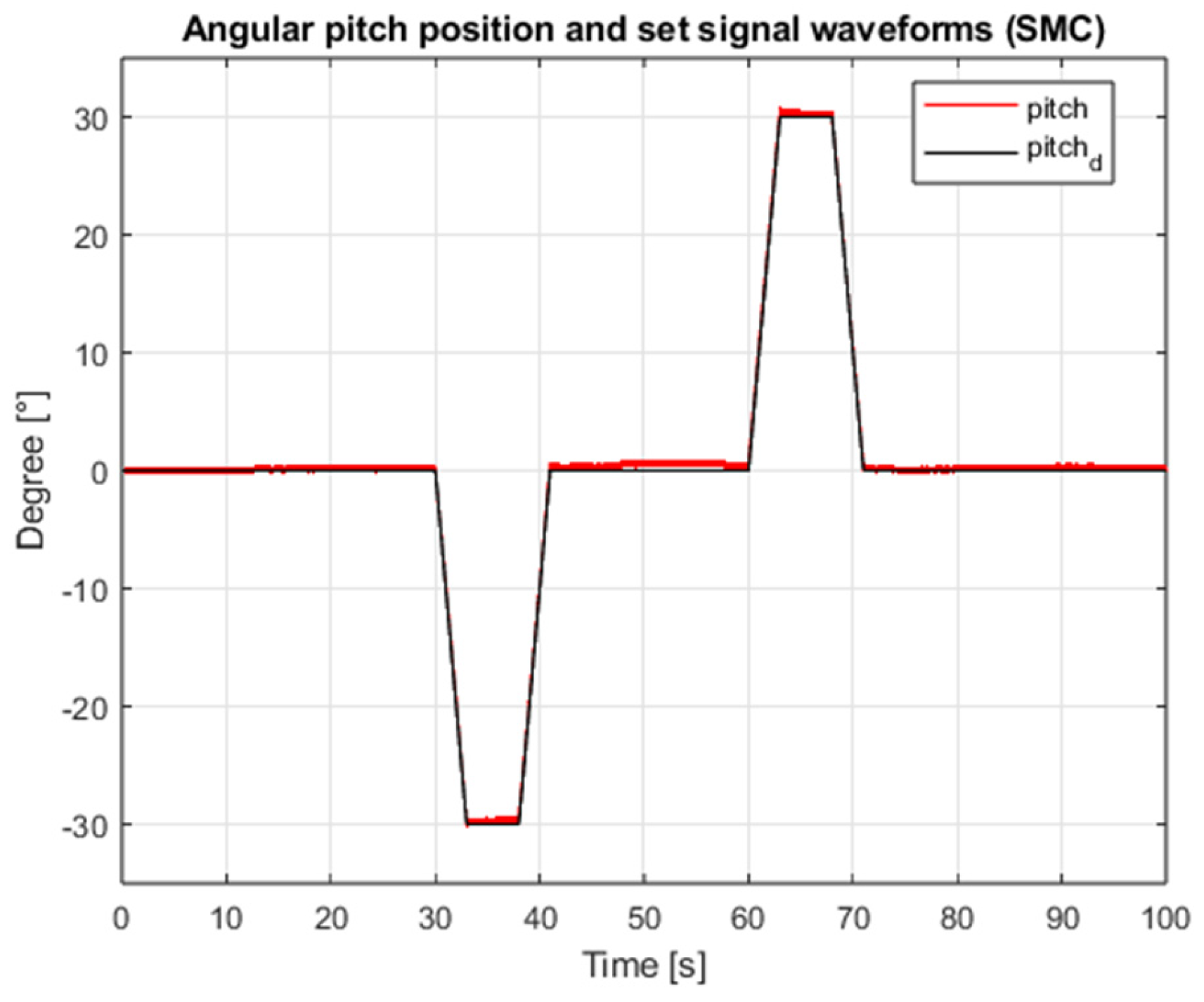
5. Simulation Tests of the Implemented Angular Positioning Systems
6. Implementation of the Classic Linear Positioning Outer Loop Control System
7. Synthesis of Sliding Mode Controllers for a Linear Positioning Outer Loop Control System
- -
- —sliding variable for control of the X-axis position of the drone;
- -
- —direction coefficient of the switching line for X-axis position control;
- -
- —error of linear position control in the Z axis.
- -
- —control signal of the linear position controller in the Z axis;
- -
- —signal of the equivalent part of the control;
- -
- —signal of the discontinuous part of the control.
- -
- —positive sliding variable coefficient;
- -
- —power exponent parameter for discontinuous variable gain.
- -
- —Lyapunov function.
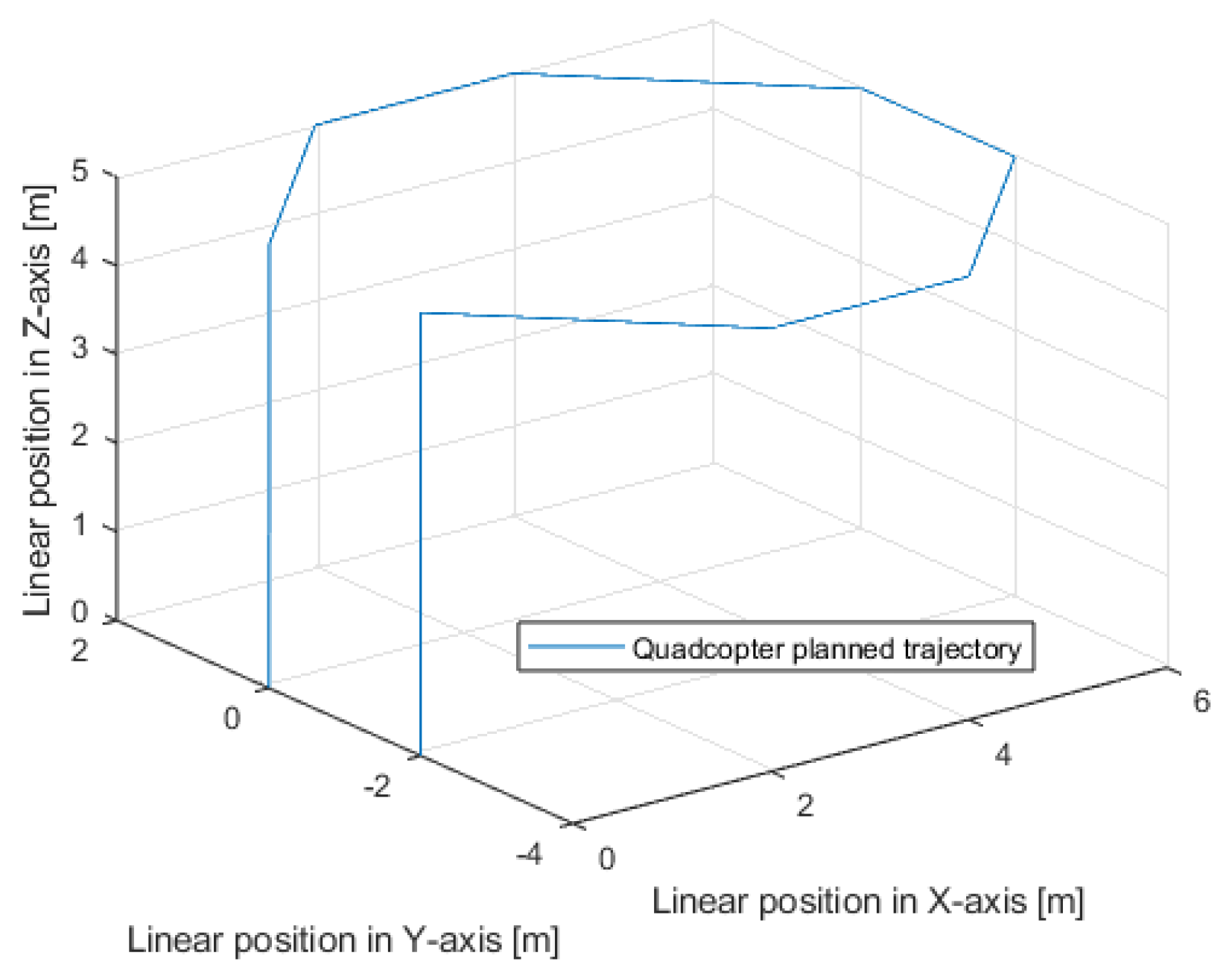
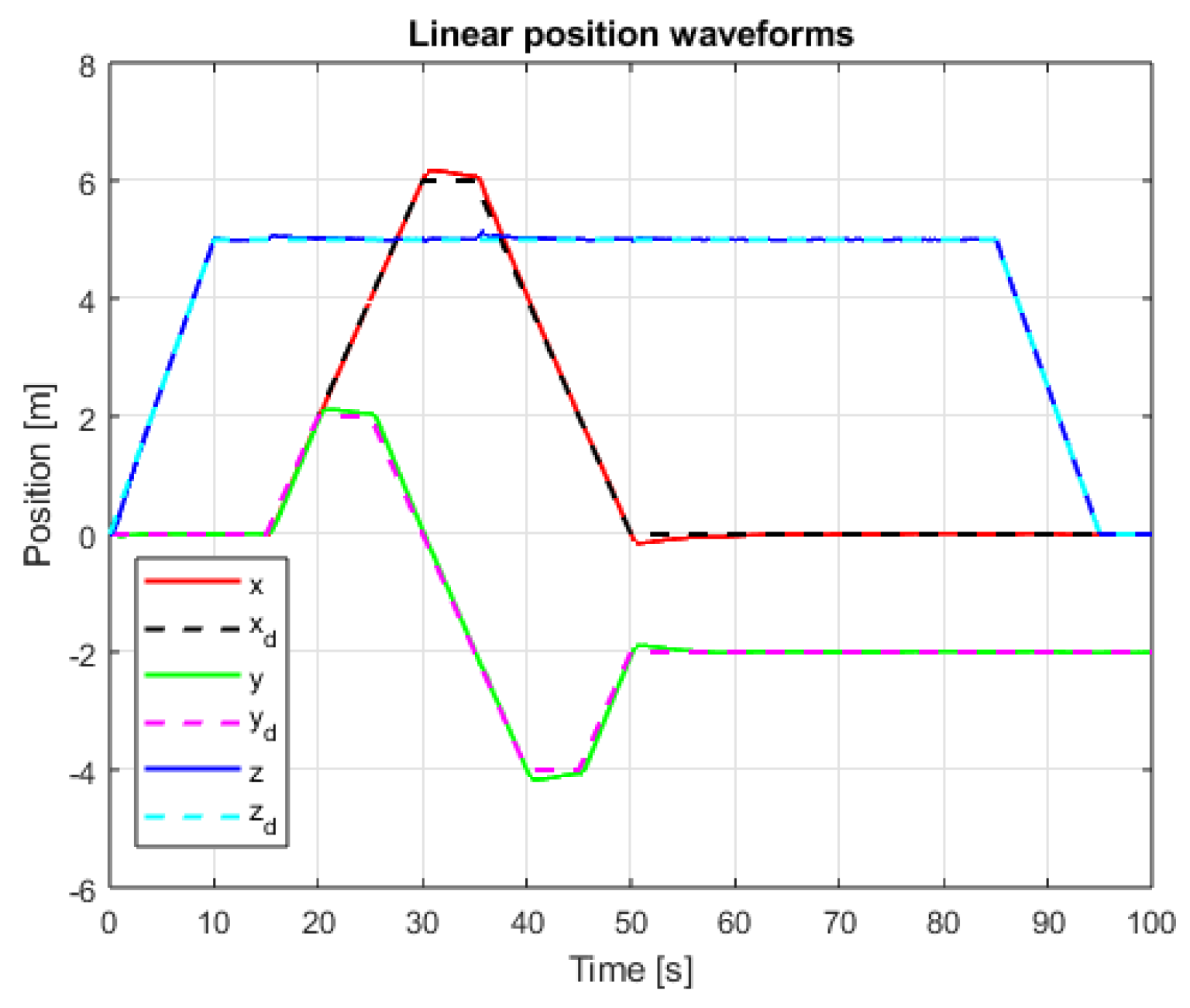
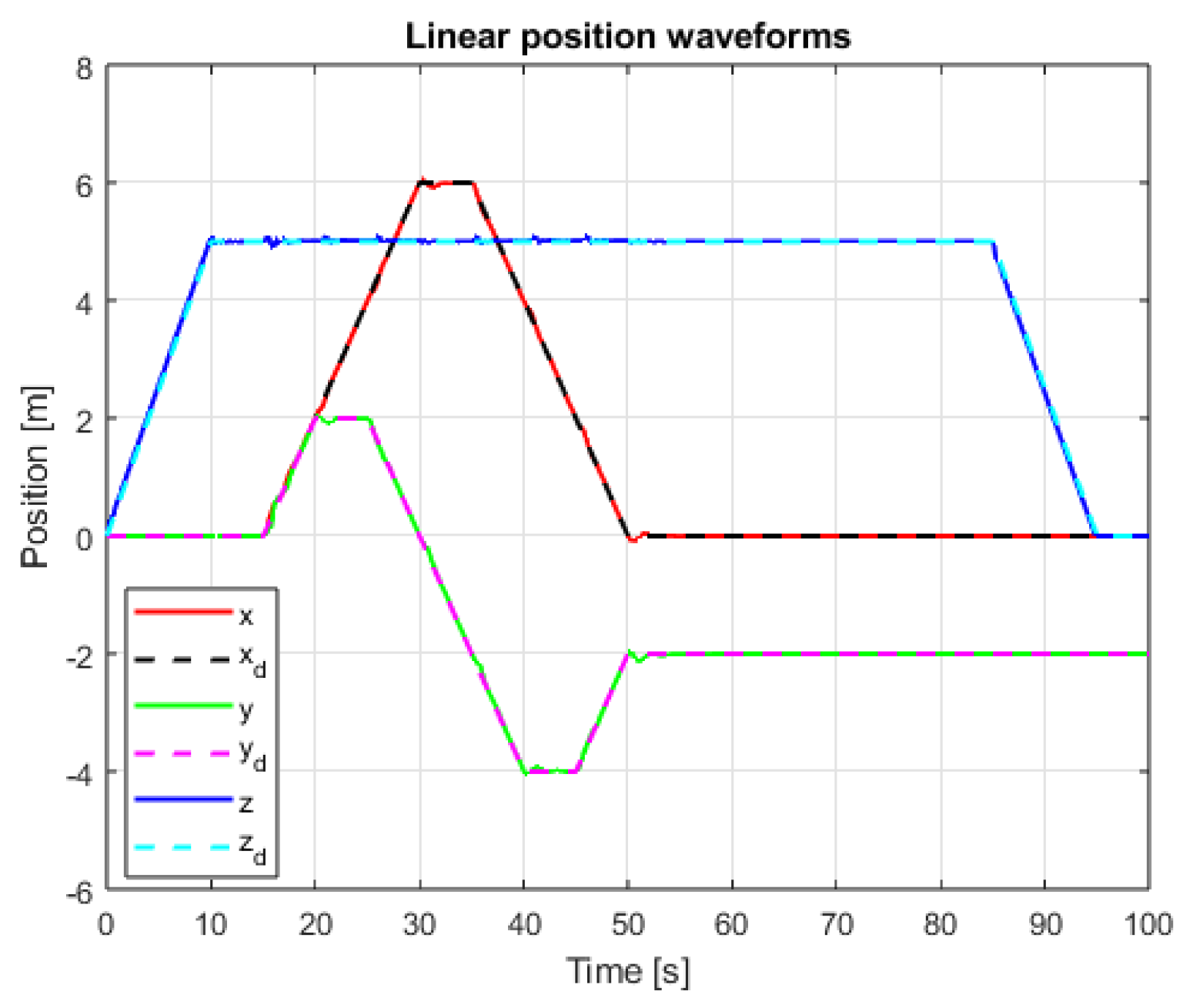
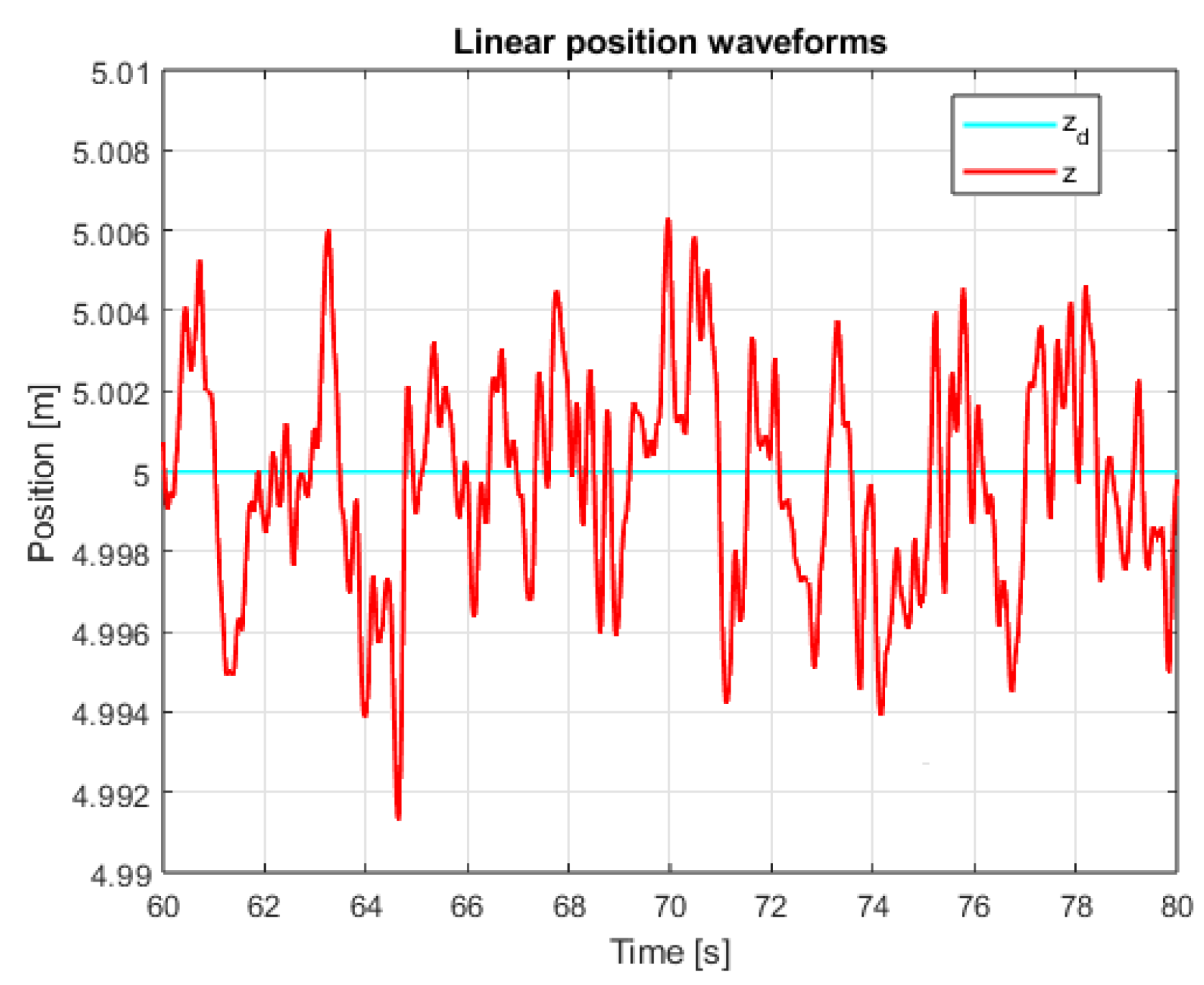
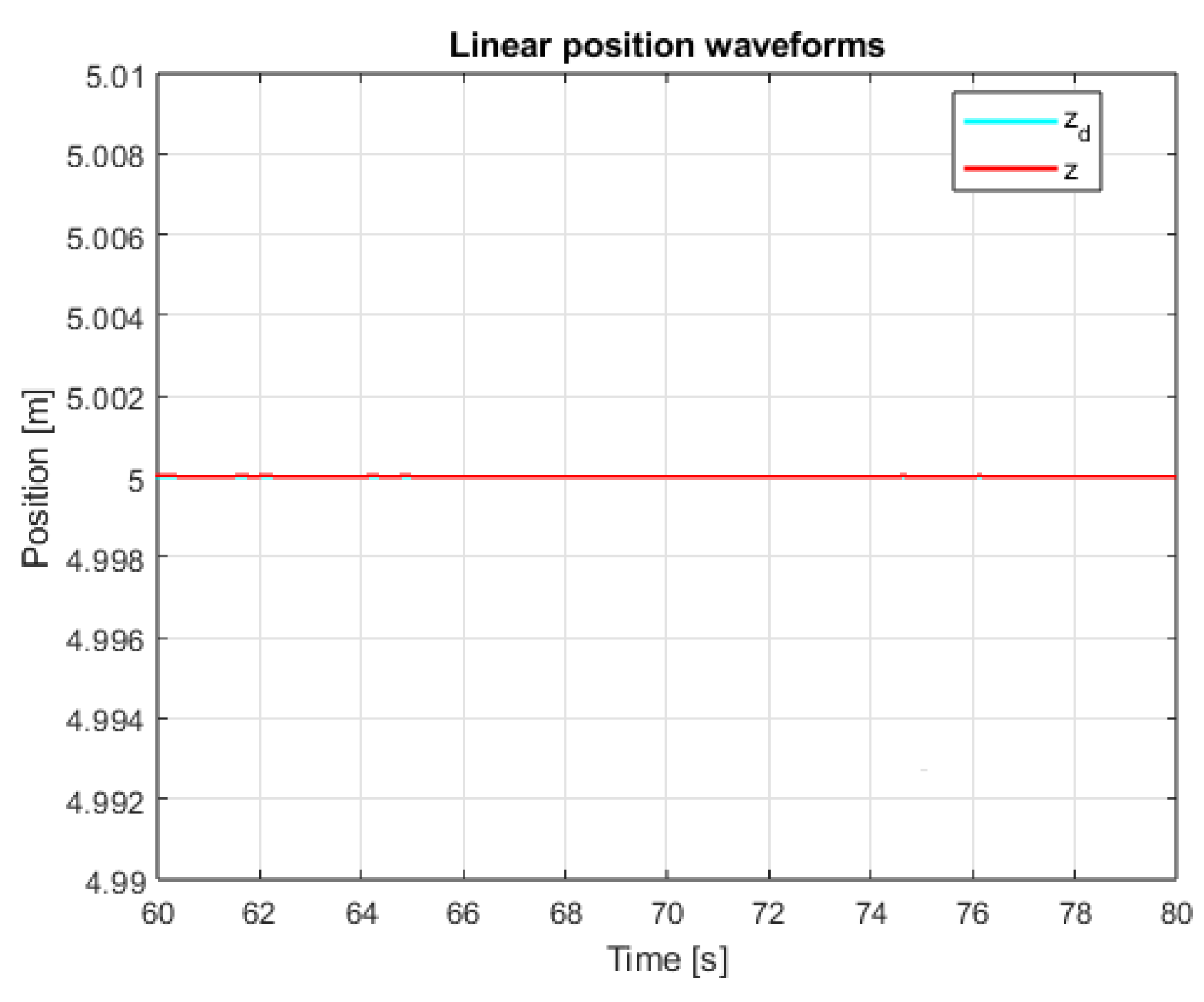
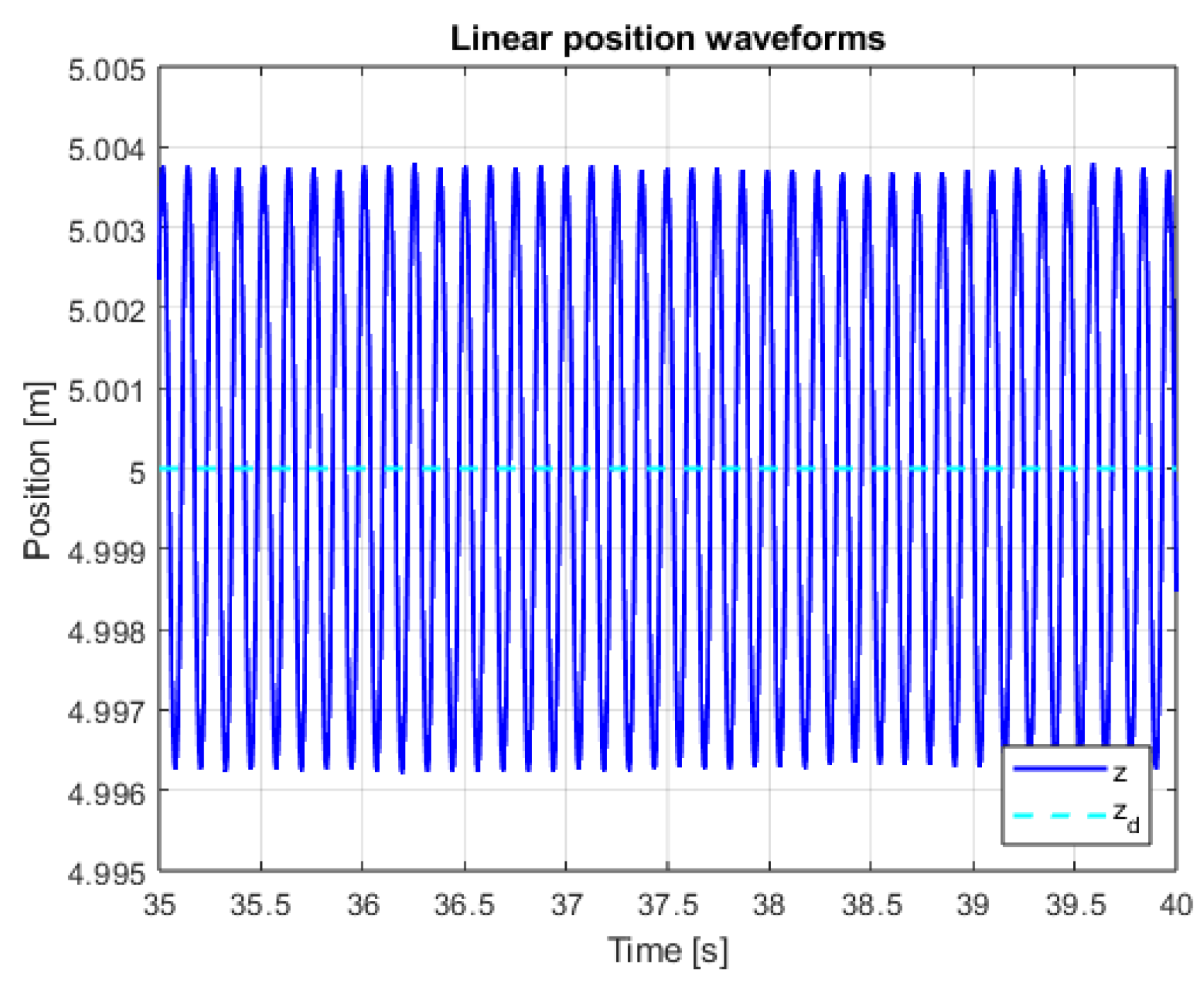
8. Simulation Tests of the Implemented Linear Positioning Systems
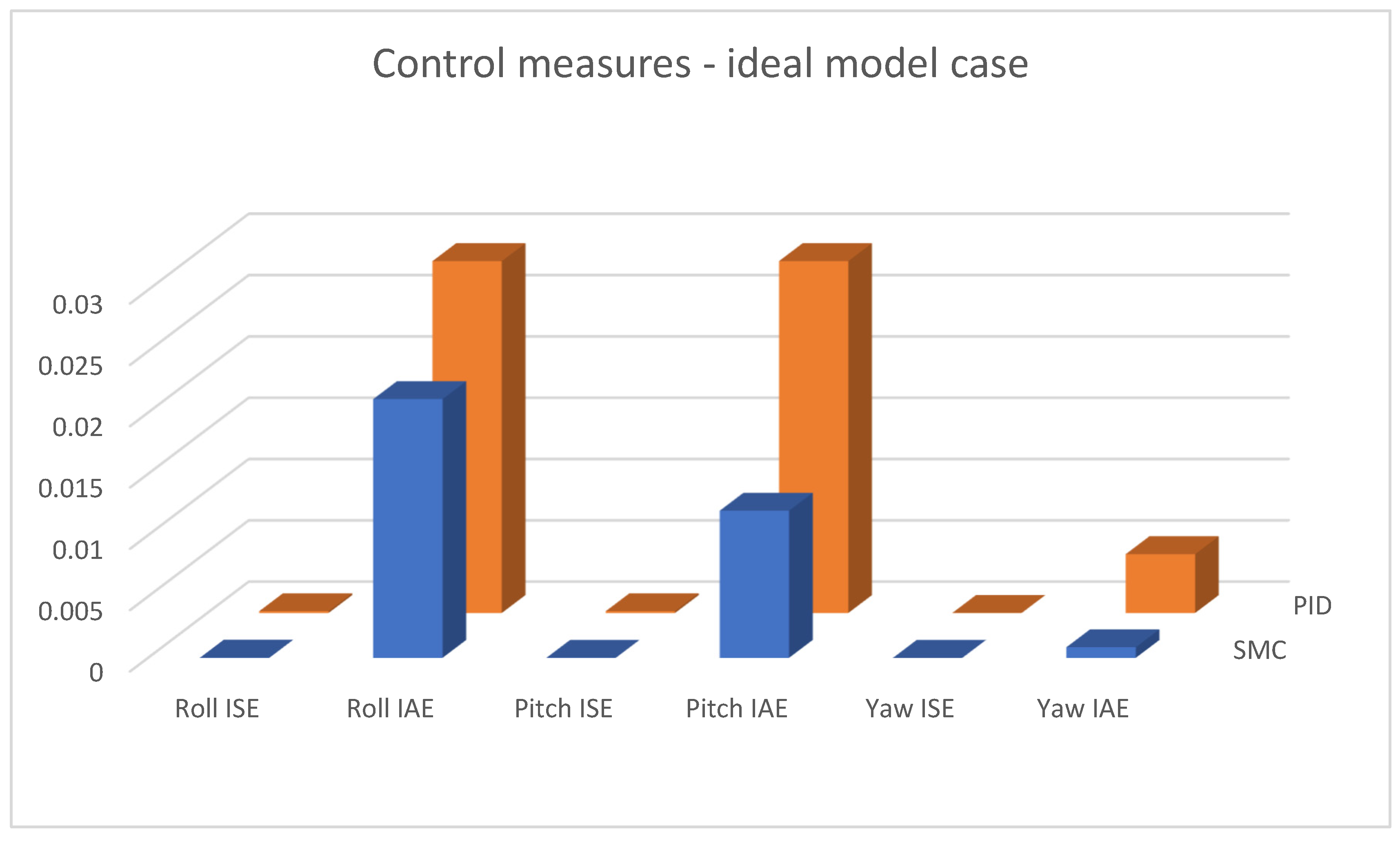
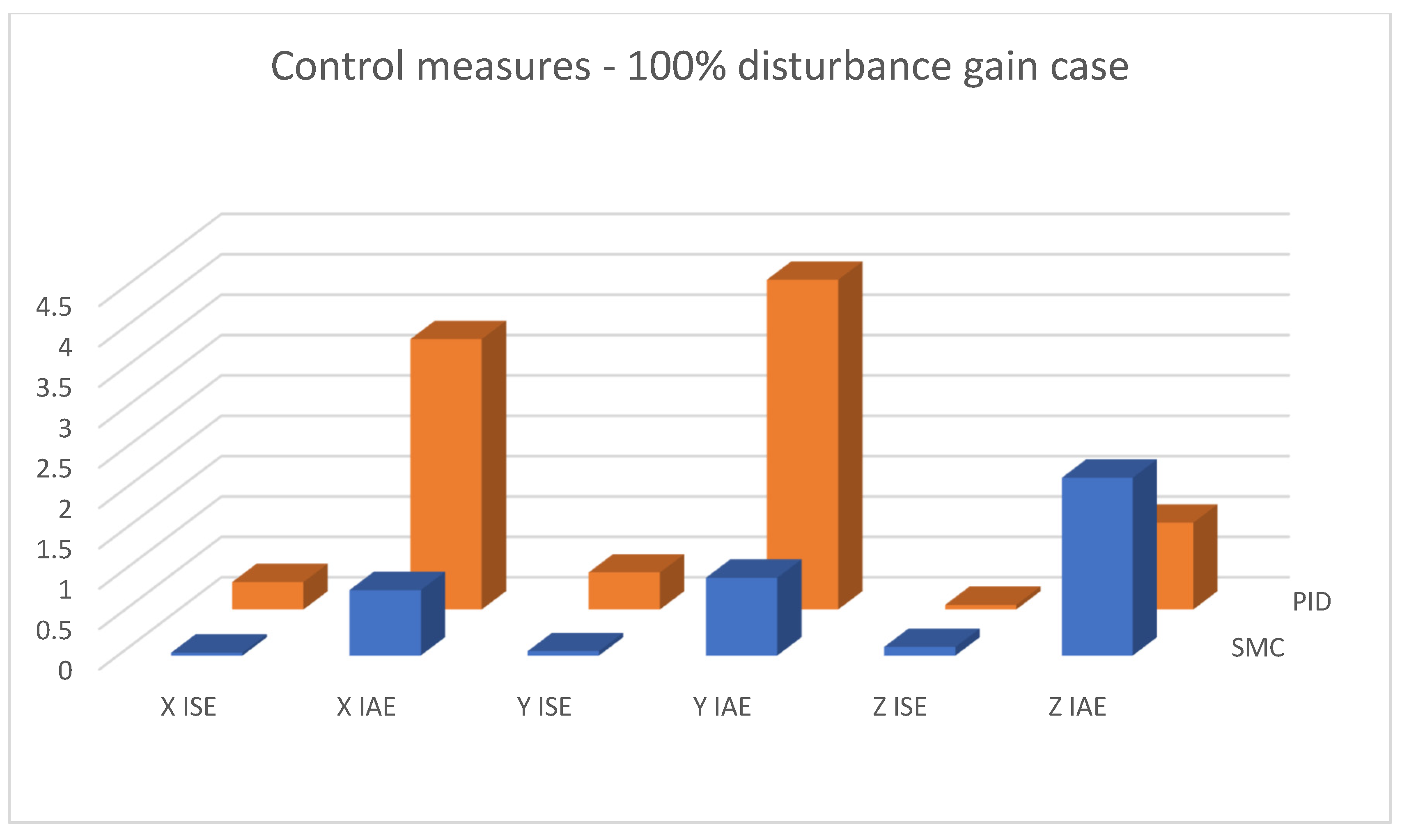
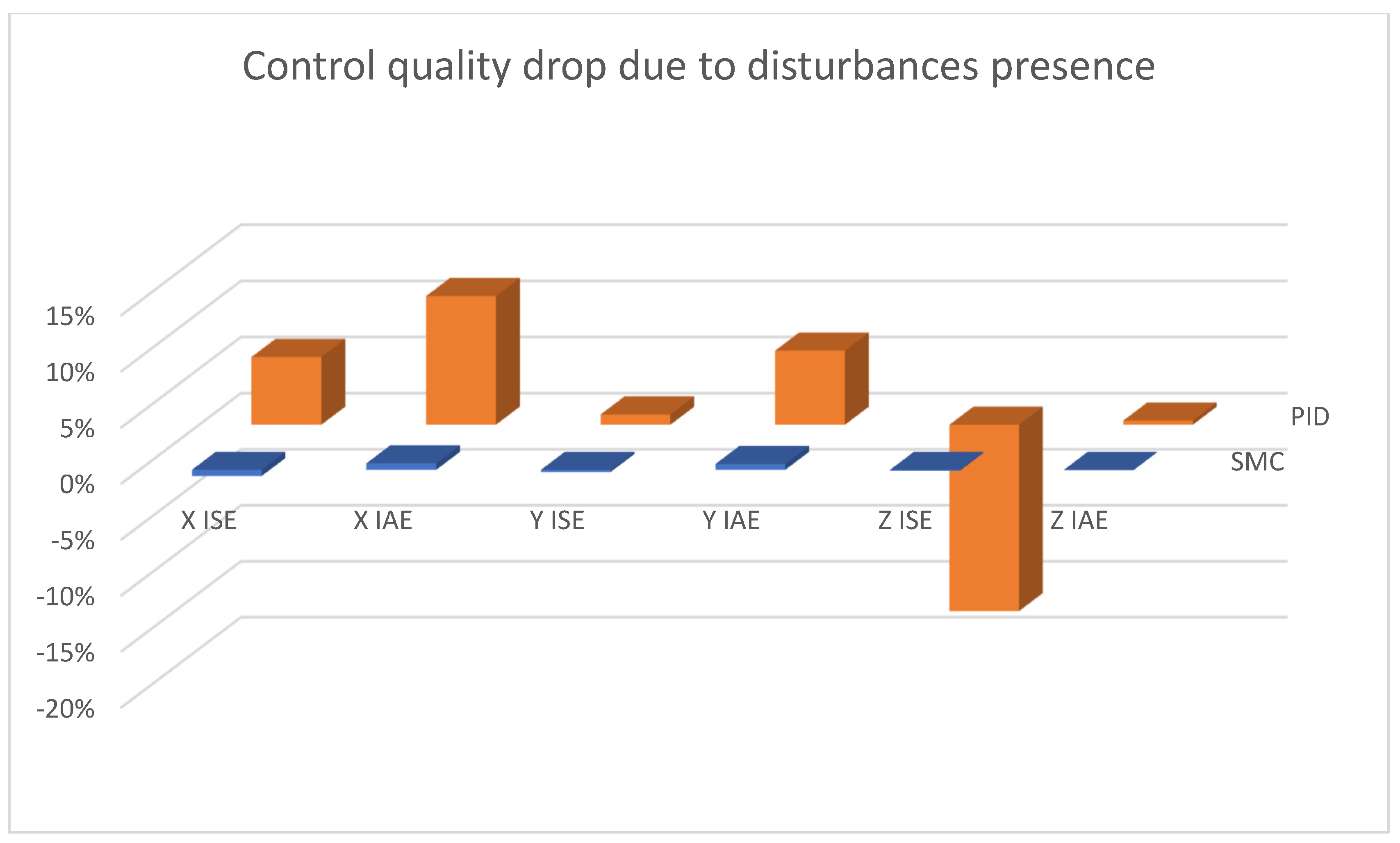
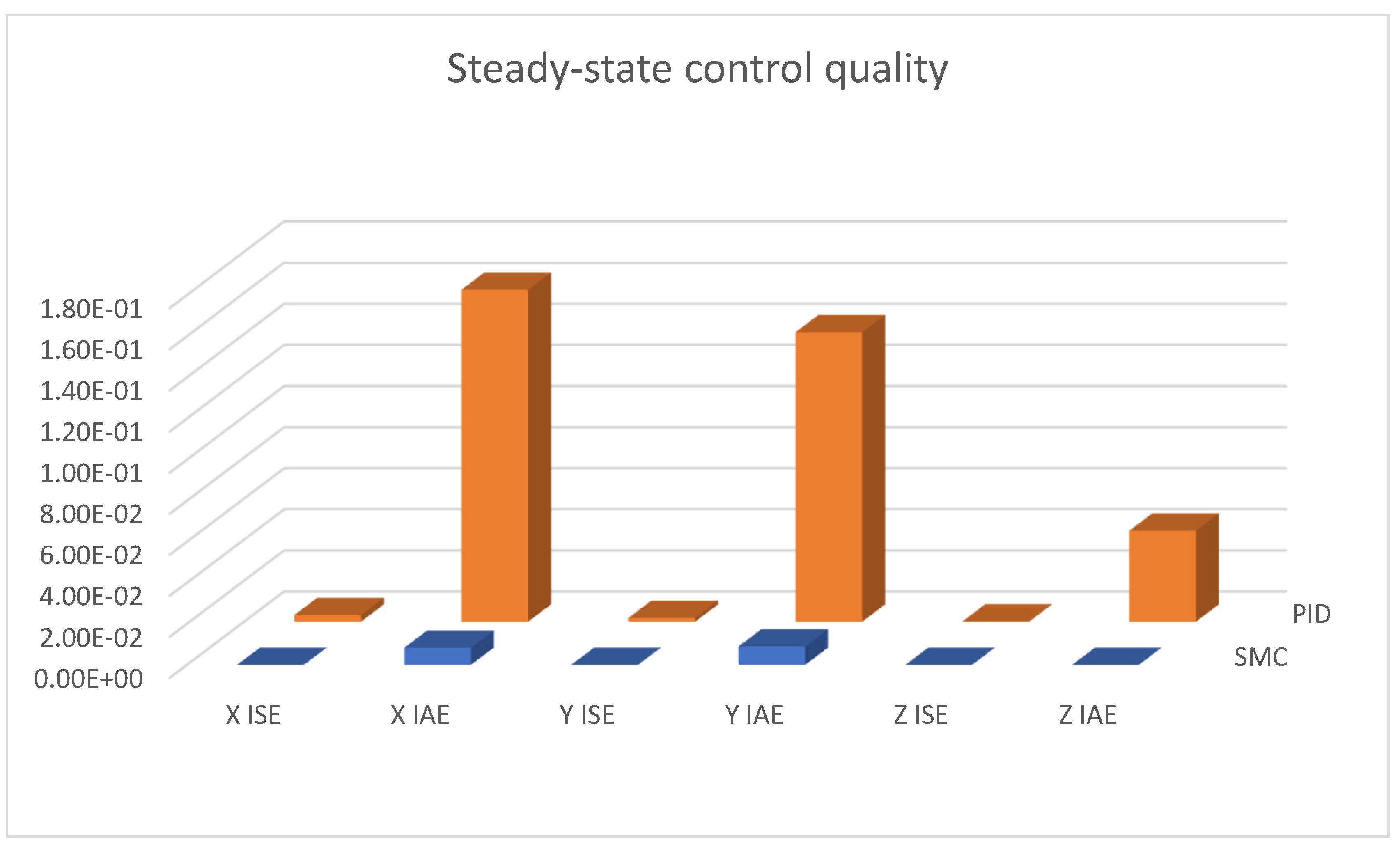
9. Comparative Analysis of the Results of Simulation of Classic and Sliding Mode Control Systems
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hoffmann, G.M.; Huang, H.; Waslander, S.L.; Tomlin, C.J. Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; pp. 1–4. [Google Scholar]
- Ma, L.; Zhu, F. Human-in-the-loop formation control for multi-agent systems with asynchronous edge-based event-triggered communications. Automatica 2024, 167, 111744. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, J.; Liang, J. Security Control of Multiagent Systems Under Denial-of-Service Attacks. IEEE Trans. Cybern. 2022, 52, 4323–4333. [Google Scholar] [CrossRef] [PubMed]
- Carney, R.; Chyba, M.; Gray, C.; Wilkens, G.; Corey, S. Multi-agent systems for quadcopters. J. Geom. Mech. 2022, 14, 1–28. [Google Scholar] [CrossRef]
- Almakhles, D.J. Robust Backstepping Sliding Mode Control for a Quadrotor Trajectory Tracking Application. IEEE Access 2019, 8, 5515–5524. [Google Scholar] [CrossRef]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a Quadcopter Platform. In Proceedings of the 2013 International Conference of Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013; pp. 1–2. [Google Scholar]
- Bao, N.; Ran, X.; Wu, Z.; Xue, Y.; Wang, K. Research on attitude controller of quadcopter based on cascade PID control algorithm. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 1493–1496. [Google Scholar]
- Hoang, V.T.; Phung, M.D.; Ha, Q.P. Adaptive Twisting Sliding Mode Control for Quadrotor Unmanned Aerial Vehicles. In Proceedings of the 2017 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017; pp. 671–674. [Google Scholar]
- Labbadi, M.; Cherkaoui, M. Adaptive Fractional-Order Nonsingular Fast Terminal Sliding Mode-Based Robust Tracking Control of Quadrotor UAV With Gaussian Random Disturbances and Uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2265–2277. [Google Scholar] [CrossRef]
- Yih, C. Flight Conttrol of a Tilt-Rotor Quadcopter via Sliding Mode. In Proceedings of the 2016 International Automatic Control Conference (CACS), Taichung, Taiwan, 9–11 November 2016; pp. 65–70. [Google Scholar]
- Cheng, X.; Liu, Z. Robust Tracking Control of a Quadcopter Via Terminal Sliding Mode Control Based on Finite-time Disturbance Observer. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; pp. 1217–1218. [Google Scholar]
- Elhennawy, A.M.; Habib, M.K. Nonlinear Robust Control of a Quadcopter: Implementation and Evaluation. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3782–3784. [Google Scholar]
- Eltayeb, A.; Rahmat, M.F.; Basri, M.A.M.; Eltoum, M.A.M.; El-Ferik, S. An Improved Design of an Adaptive Sliding Mode Controller for Chattering Attenuation and Trajectory Tracking of the Quadcopter UAV. IEEE Access 2020, 8, 205968–205979. [Google Scholar] [CrossRef]
- Mustapa, Z.; Saat, S.; Husin, S.H.; Zaid, T. Quadcopter Psyhical Parameter Identification and Altitude System Analysis. In Proceedings of the 2014 IEEE Symposium on Industrial Electronics & Applications (ISIEA), Kota Kinabalu, Malaysia, 28 September–1 October 2014; p. 130. [Google Scholar]
- Nemati, H.; Montazeri, A. Output Feedback Sliding Mode Control of Quadcopter Using IMU Navigation. In Proceedings of the 2019 IEEE International Conference on Mechatronics (ICM), Ilmenau, Germany, 18–20 March 2019; pp. 634–636. [Google Scholar]
- Sadigh, R.S.M. Optimizing PID Controller Coefficients Using Fractional Order Based on Intelligent Optimization Algorithms for Quadcopter. In Proceedings of the 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), Tehran, Iran, 23–25 October 2018; pp. 146–147. [Google Scholar]
- Thanh, H.L.N.N.; Hong, S.K. Quadcopter Robust Adaptive Second Order Sliding Mode Control Based on PID Sliding Surface. IEEE Access 2018, 6, 66850–66854. [Google Scholar] [CrossRef]
- Paing, H.S.; Schagin, A.V.; Win, K.S.; Linn, Y.H. New Designing Approaches for Quadcopter Using 2D Model Modelling a Cascaded PID Controller. In Proceedings of the 2020 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St. Petersburg, Russia; Moscow, Russia, 27–30 January 2020; pp. 2370–2372. [Google Scholar]
- Pratama, B.; Muis, A.; Subiantoro, A. Quadcopter Trajectory Tracking and Attitude Control Based on Euler Angle Limitation. In Proceedings of the 2018 6th International Conference on Control Engineering & Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; pp. 1–3. [Google Scholar]
- Castillo-Zamora, J.J.; Camarillo-Gomez, K.A.; Perez-Soto, G.I.; Rodriguez-Resendiz, J. Comparision of PD, PID and Sliding-Mode Position Controllers for V-tail Quadcopter Stability. IEEE Access 2018, 6, 38092–38093. [Google Scholar] [CrossRef]
- Prakosa, J.A.; Samokvalov, D.V.; Ponce, G.R.V.; Al-Mahturi, F.S. Speed Control of Brushless DC Motor for Quad Copter Drone Ground Test. In Proceedings of the 2019 IEEE Conference of Russian Young Researches in Electrical and Electronic Engineering (EIConRus), St. Petersburg, Russia; Moscow, Russia, 28–31 January 2019; pp. 644–645. [Google Scholar]
- Fetan, M.; Sefidgari, B.L.; Barenji, A.V. An Adaptive Neuro PID for Controlling the Altitude of Quadcopter Robot. In Proceedings of the 2013 18th International Conference on Methods & Models in Automation & Robotics (MMAR), Międzyzdroje, Poland, 26–29 August 2013; pp. 662–663. [Google Scholar]
- Bari, S.; Hamdani, S.S.Z.; Khan, H.U.; Rehman, M.U.; Khan, H. Artificial Neural Network Based Self-Tuned PID Controller for Flight Control of Quadcopter. In Proceedings of the 2019 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 21–22 February 2019; pp. 1–2. [Google Scholar]
- Bartoszewicz, A. Conventional Sliding Modes in Continuous and Discrete Time Domains. In Proceedings of the 2017 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; pp. 588–590. [Google Scholar]
- Utkin, V.; Lee, H. Chattering Problem in Sliding Mode Control Systems. In Proceedings of the International Workshop on Variable Structure Systems, Alghero, Italy, 5–7 June 2006; pp. 346–350. [Google Scholar]
- Abrougui, H.; Hachicha, S.; Zaoui, C.; Dallagi, H.; Nejim, S. Flight Controller Design Based on Sliding Mode Control for Quadcopter Waypoints Tracking. In Proceedings of the 2020 4th International Conference on Advanced Systems and Emergent Technologies (IC_ASET), Hammamet, Tunisia, 15–18 December 2020; pp. 13–20. [Google Scholar]
- Utkin, V.; Shi, J. Integral Sliding Mode in Systems Operating under Uncertainy Conditions. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 11–13 December 1996; pp. 4591–4593. [Google Scholar]
- Katiar, A.; Rashdi, R.; Ali, Z.; Baig, U. Control and stability analysis of quadcopter. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; p. 4. [Google Scholar]
- Tripathi, V.K.; Behera, L.; Verma, N. Design of Sliding mode and Backstepping Controllers for a Quadcopter. In Proceedings of the 2015 39th National Systems Conference (NSC), Greater Noida, India, 14–16 December 2015; pp. 1–6. [Google Scholar]
- Chen, J.; Jiang, D. Study on Modeling and Simulation on Non-grid-connected Wind Turbine. In Proceedings of the 2009 World Non-Grid-Connected Wind Power and Energy Conference, Nanjing, China, 24–26 September 2009; pp. 1–2. [Google Scholar]
- Leng, J.; Ma, C. Sliding Mode Control for PMSM Based on A Novel Hybrid Reaching Law. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 3006–3009. [Google Scholar]
- Xi, L.; Dong, H.; Yang, S.; Qi, X. Terminal Sliding Mode Control for Robotic Manipulator Based on Combined Reaching Law. In Proceedings of the 2019 International Conference on Computer Network, Electronic and Automation (ICCNEA), Xi’an, China, 27–29 September 2019; pp. 436–439. [Google Scholar]
- Li, Y.; Liu, L. The research of the sliding mode control method based on improved double reaching law. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 672–674. [Google Scholar]
- Mozayan, S.M.; Saad, M.; Vahedi, H.; Fortin-Blanchette, H.; Soltani, M. Sliding Mode Control of PMSG Wind Turbine Based on Enhanced Exponential Reaching Law. IEEE Trans. Ind. Electron. 2016, 63, 6148–6159. [Google Scholar] [CrossRef]
- Sawiński, A.; Chudzik, P.; Tatar, K. SMC Algorithms in T-Type Bidirectional Power Grid Converter. Energies 2024, 17, 2970. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
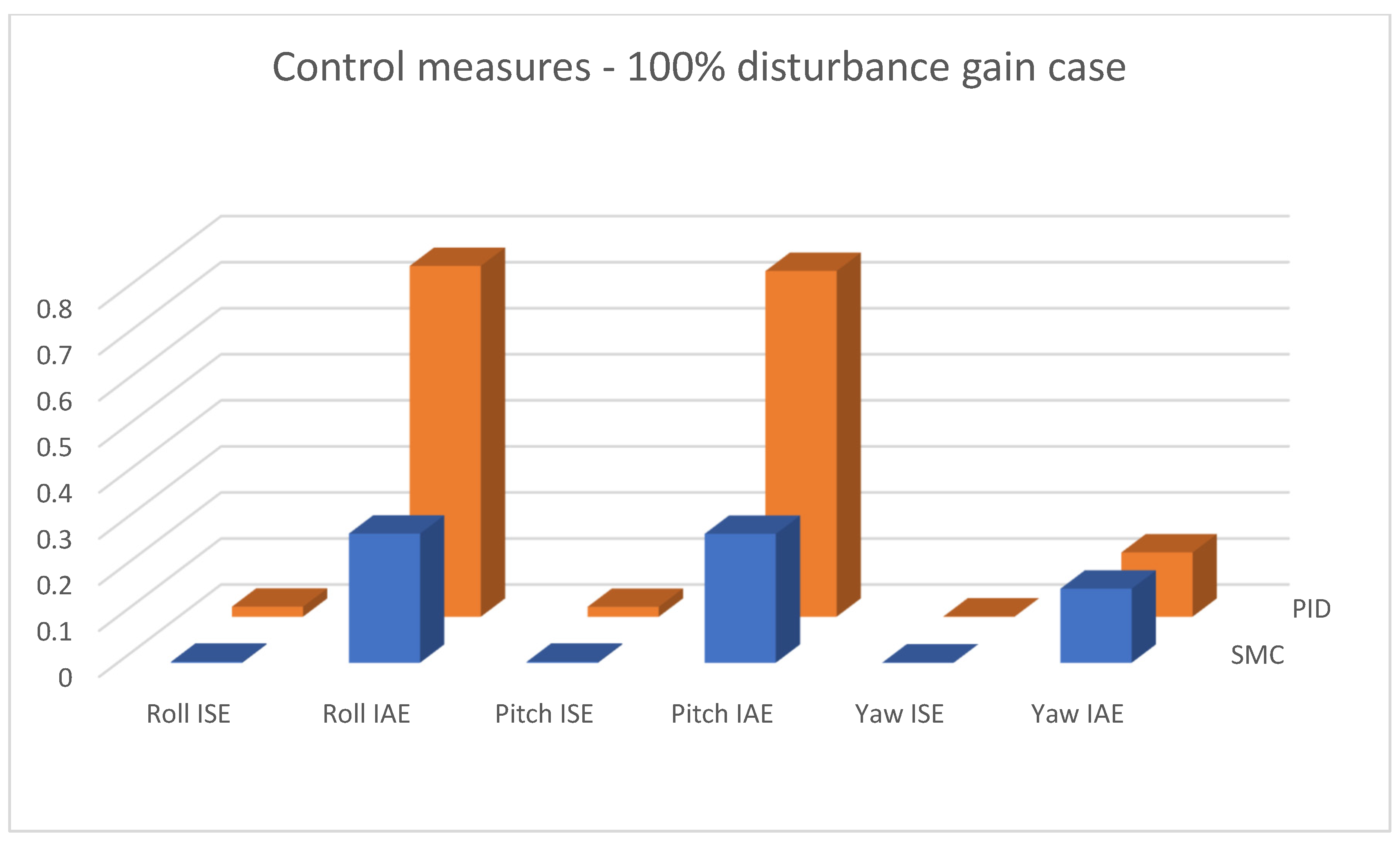
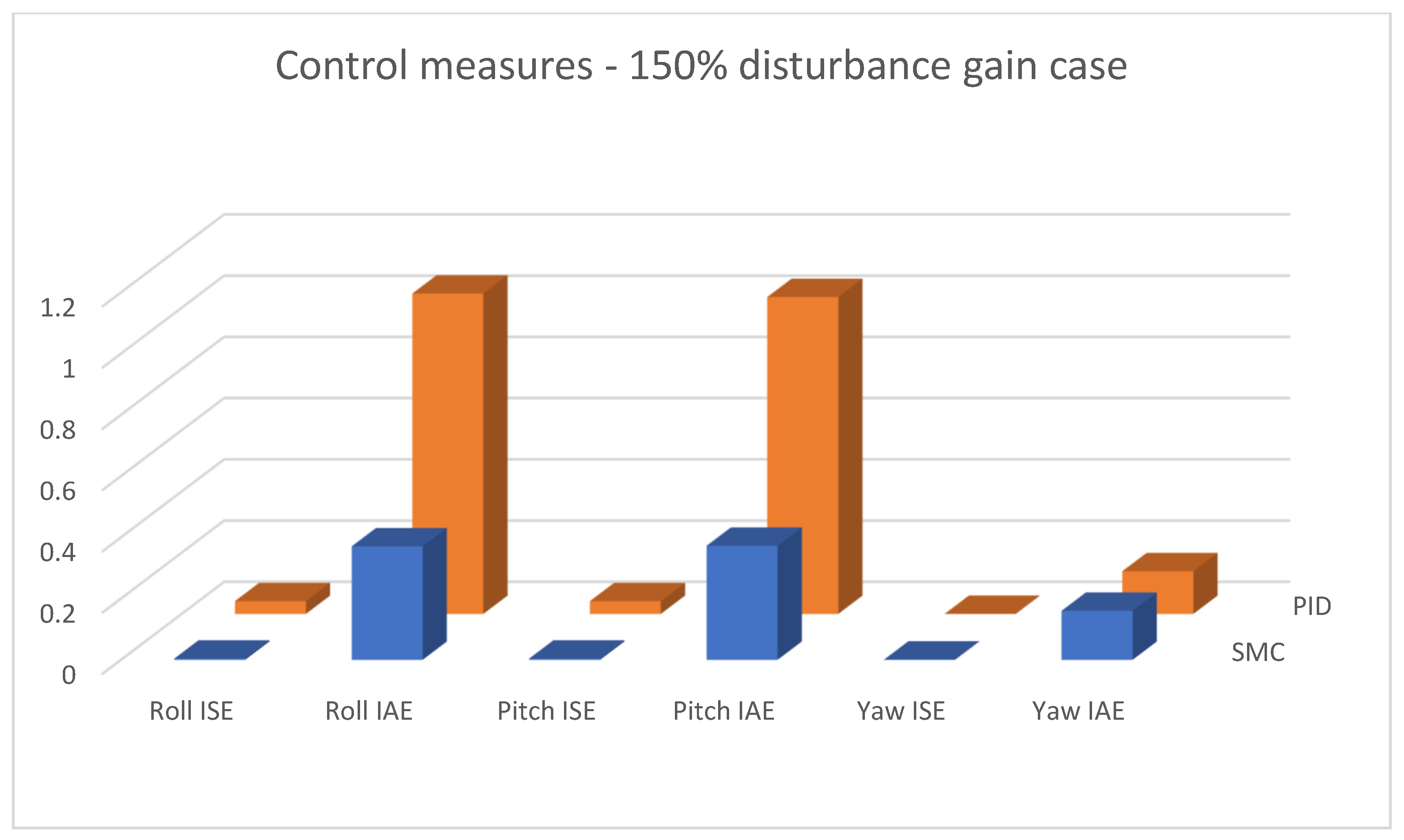
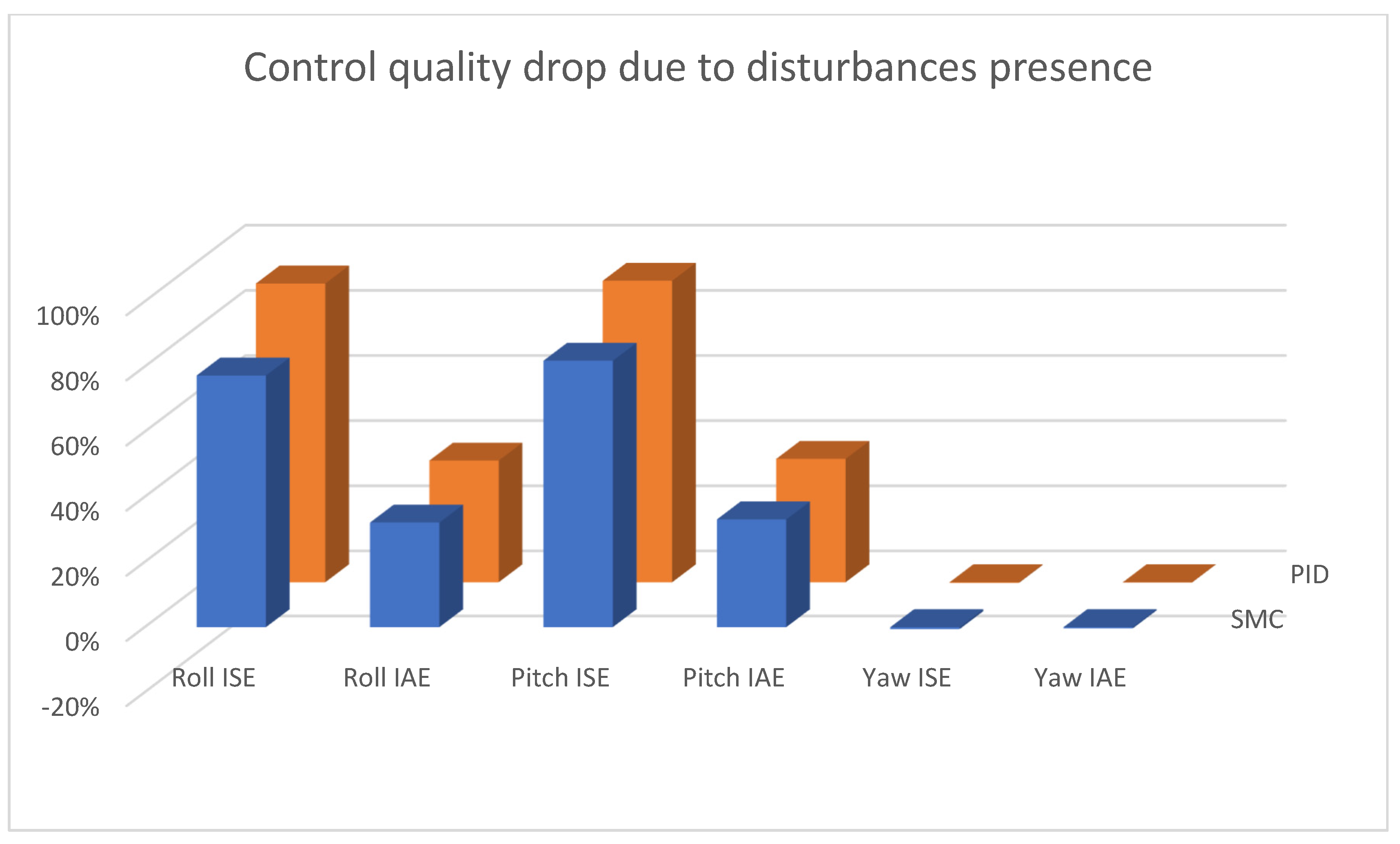
| Types and Parameters of Controller | Ideal Model Case | Disturbance (100% Gain) | Disturbance (150% Gain) | |
|---|---|---|---|---|
| PID | Roll ISE | 0.000147570 | 0.021800000 | 0.041800000 |
| Roll IAE | 0.028700000 | 0.761900000 | 1.046600000 | |
| Pitch ISE | 0.000147570 | 0.021600000 | 0.041600000 | |
| Pitch IAE | 0.028700000 | 0.750700000 | 1.035100000 | |
| Yaw ISE | 0.000003943 | 0.000479500 | 0.000478460 | |
| Yaw IAE | 0.004800000 | 0.139600000 | 0.139500000 | |
| SMC | Roll ISE | 0.000012444 | 0.002200000 | 0.003900000 |
| Roll IAE | 0.021100000 | 0.280500000 | 0.370600000 | |
| Pitch ISE | 0.000006852 | 0.002200000 | 0.004000000 | |
| Pitch IAE | 0.012000000 | 0.279900000 | 0.372500000 | |
| Yaw ISE | 0.000000089 | 0.000690170 | 0.000686050 | |
| Yaw IAE | 0.00086577 | 0.160800000 | 0.160200000 | |
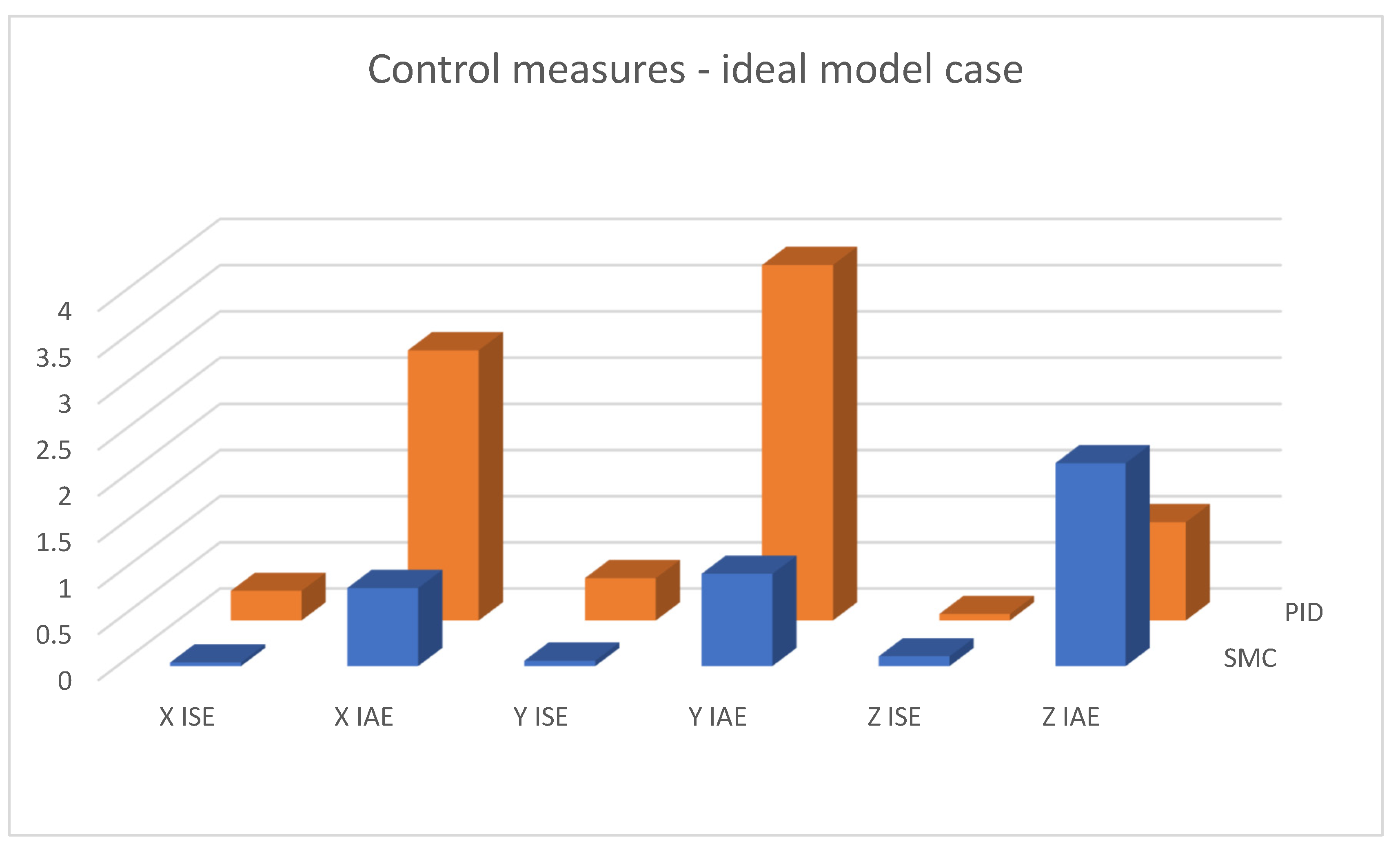
| Types and Parameters of Controller | Ideal Model Case | Disturbance (100% Gain) | Disturbance (150% Gain) | Steady State | |
|---|---|---|---|---|---|
| PID | X ISE | 0.3206 | 0.3396 | 0.3601 | 0.0032 |
| X IAE | 2.9261 | 3.3482 | 3.7319 | 0.1615 | |
| Y ISE | 0.4592 | 0.4585 | 0.4627 | 0.0018 | |
| Y IAE | 3.8488 | 4.0841 | 4.3535 | 0.1409 | |
| Z ISE | 0.0697 | 0.0571 | 0.0476 | 1.48 × 10−4 | |
| Z IAE | 1.0653 | 1.0744 | 1.0784 | 0.0443 | |
| SMC | X ISE | 0.0394 | 0.0362 | 0.036 | 4.05 × 10−6 |
| X IAE | 0.8465 | 0.8103 | 0.815 | 0.0083 | |
| Y ISE | 0.059 | 0.0547 | 0.0546 | 4.97 × 10−6 | |
| Y IAE | 1.0009 | 0.963 | 0.968 | 0.0089 | |
| Z ISE | 0.1061 | 0.1069 | 0.1068 | 4.16 × 10−13 | |
| Z IAE | 2.1999 | 2.202 | 2.2012 | 2.39 × 10−6 | |
| µ | Z ISE | Z IAE |
|---|---|---|
| 0 | 0.000298533957762 | 0.060149331846856 |
| 0.25 | 0.000172976298346 | 0.021814947905653 |
| 0.5 | 0.000179834715996 | 0.015723003012009 |
| 0.75 | 0.000162966965424 | 0.014817696593609 |
| 1 | 0.000112808523373 | 0.012217696398422 |
| 1.25 | 0.000083358788050 | 0.012133886733481 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sawiński, A.; Chudzik, P.; Tatar, K. Cascade Sliding Mode Control for Linear Displacement Positioning of a Quadrotor. Sensors 2025, 25, 883. https://doi.org/10.3390/s25030883
Sawiński A, Chudzik P, Tatar K. Cascade Sliding Mode Control for Linear Displacement Positioning of a Quadrotor. Sensors. 2025; 25(3):883. https://doi.org/10.3390/s25030883
Chicago/Turabian StyleSawiński, Albert, Piotr Chudzik, and Karol Tatar. 2025. "Cascade Sliding Mode Control for Linear Displacement Positioning of a Quadrotor" Sensors 25, no. 3: 883. https://doi.org/10.3390/s25030883
APA StyleSawiński, A., Chudzik, P., & Tatar, K. (2025). Cascade Sliding Mode Control for Linear Displacement Positioning of a Quadrotor. Sensors, 25(3), 883. https://doi.org/10.3390/s25030883