
One-Point Calibration of Low-Cost Sensors for Particulate Air Matter (PM) Concentration Measurement

 , ,
, ,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Arduino-Based Sensor Systems
2.2. Measurement Site and Reference Instrumentation
2.3. Measurement Campaign with Sensors Arrangement
- Good coupling with ambient air and proper exposition to external conditions;
- Avoidance of exposure to direct sunlight or external heat sources.
- The low-cost SoS was placed near the sampling inlet of the reference station. A 4 cm thick thermal insulation layer was used at the bottom and top to provide shading and thermal insulation. A pierced plastic shell was used to connect the two planes, providing support for the top plane but allowing good air exchange in the sampling volume, as shown in Figure 2.
2.4. Methods Used to Acquire and Manipulate Data
2.5. Time Granularity
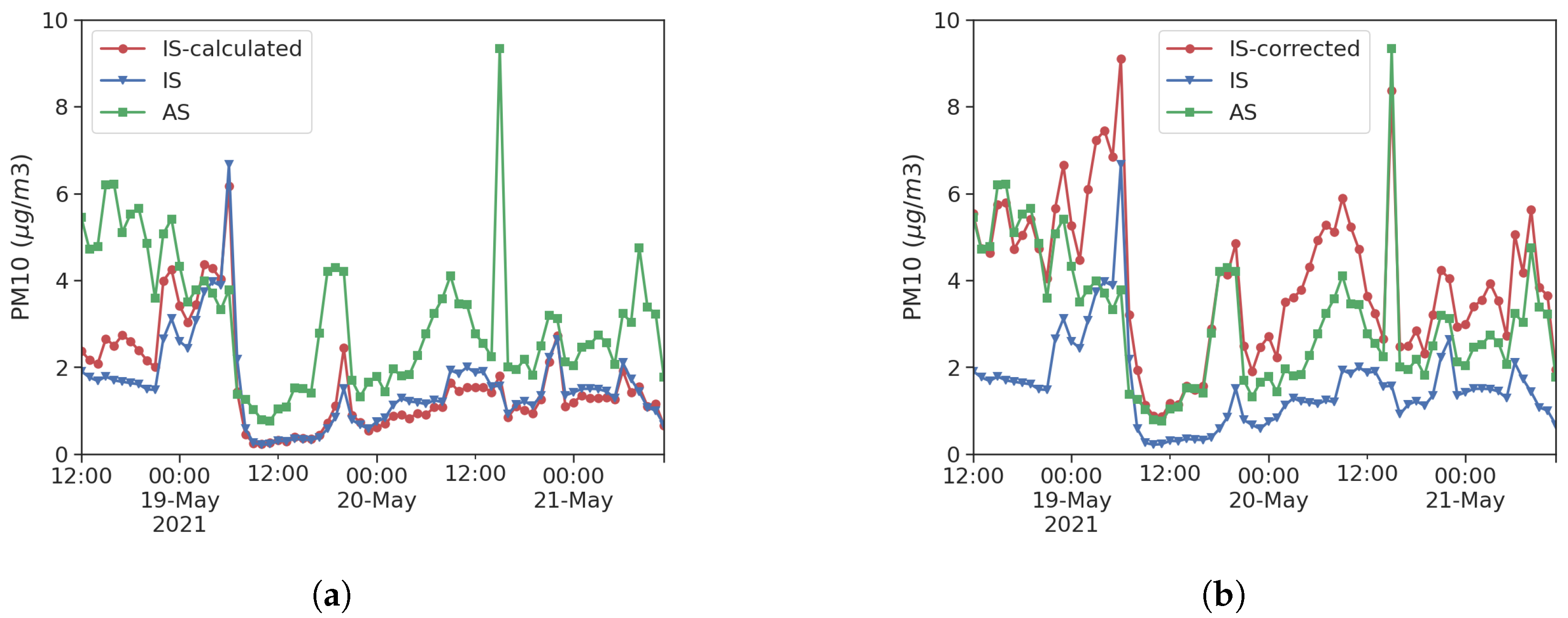
2.6. Mass Conversion Correction
3. Results
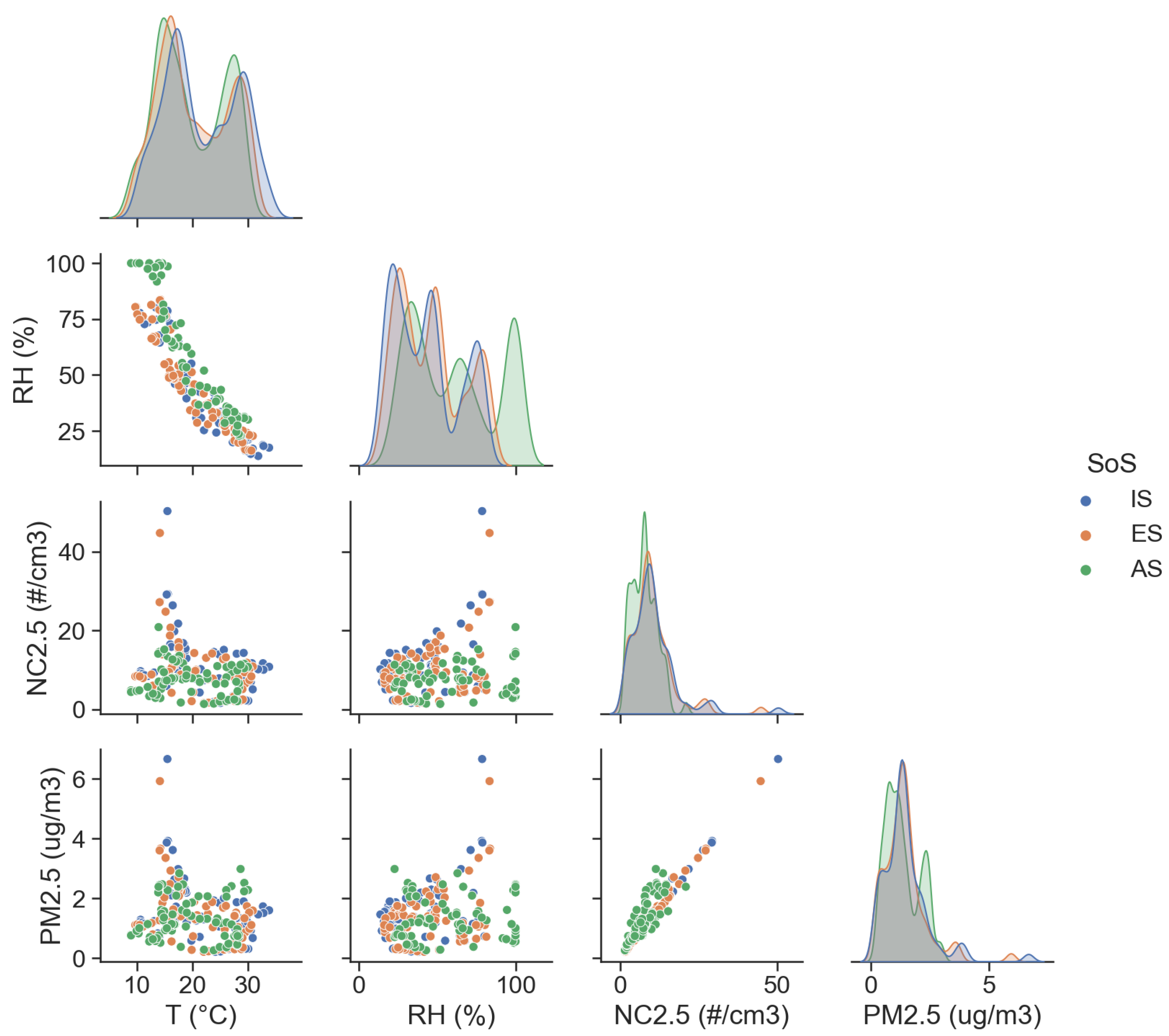
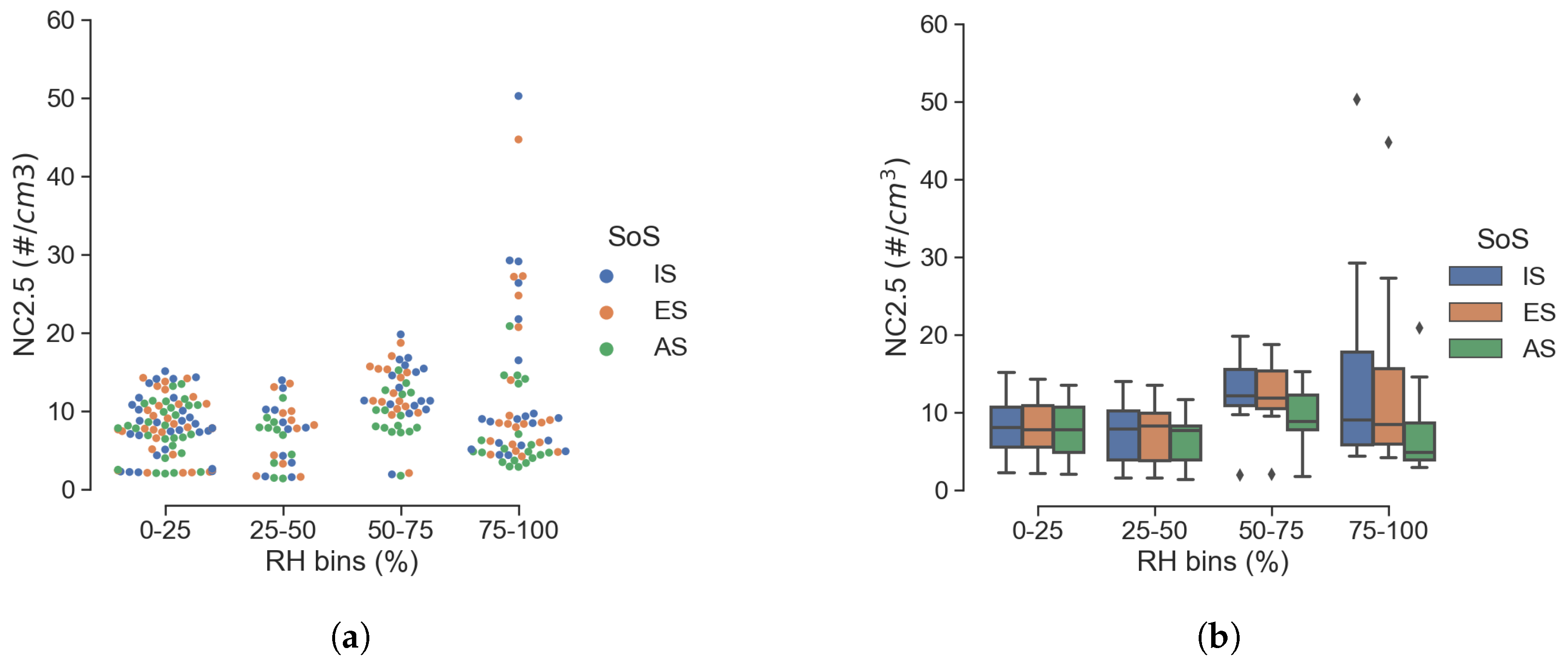
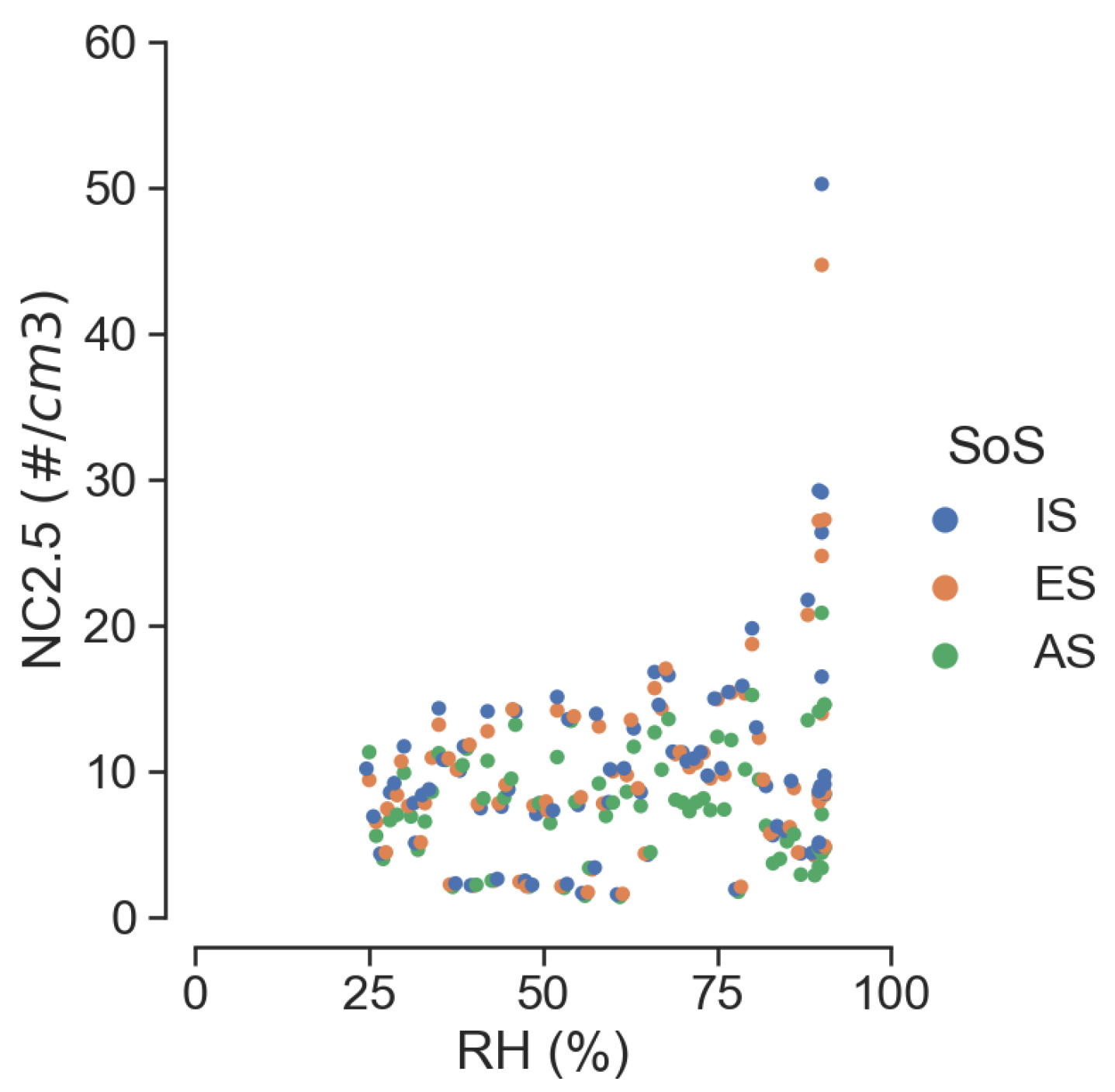
RH Sensitivity Analysis
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ARPAE | Agenzia regionale per la prevenzione, l’ambiente e l’energia dell’Emilia-Romagna |
| AS | ARPAE System of Sensors |
| BEV | Battery Electric Vehicle |
| CNR | Center for National Research |
| DD | Decimal Degrees |
| EDA | Exploratory Data Analysis |
| ES | Low-Cost Measurement System 1 |
| IAQ | Internal Air Quality |
| IS | Low-Cost Measurement System 2 |
| LCS | Low-Cost Sensor |
| LCSoS | Low-Cost System of Sensors |
| ML | Machine Learning |
| MRS | Main Reference Site |
| NC | Number Concentration |
| OLS | Ordinary Least Squares |
| OPC | Optical Particle Counter |
| PM | Particulate Matter |
| PM1 | Particulate Matter with a Diameter of 1 μm (µm) or less |
| PM2.5 | Particulate Matter with a Diameter of 2.5 μm (µm) or Less |
| PM10 | Particulate Matter with a Diameter of 10 μm (µm) or Less |
| RH | Relative Humidity |
| SoS | System of Sensors |
| Ambient Temperature (°C) |
References
- Borowiak, A.; Barbiere, M.; Kotsev, A.; Karagulian, F.; Lagler, F.; Gerboles, M. Review of Sensors for Air Quality Monitoring; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar]
- Settimo, G.; Manigrasso, M.; Avino, P. Indoor Air Quality: A Focus on the European Legislation and State-of-the-Art Research in Italy. Atmosphere 2020, 11, 370. [Google Scholar] [CrossRef]
- Tittarelli, A.; Borgini, A.; Bertoldi, M.; De Saeger, E.; Ruprecht, A.; Stefanoni, R.; Tagliabue, G.; Contiero, P.; Crosignani, P. Estimation of particle mass concentration in ambient air using a particle counter. Atmos. Environ. 2008, 42, 8543–8548. [Google Scholar] [CrossRef]
- Okorn, K.; Iraci, L. An overview of outdoor low-cost gas-phase air quality sensor deployments: Current efforts, trends and limitations. Atmos. Meas. Tech. 2024, 17, 6425–6457. [Google Scholar] [CrossRef]
- Gerboles, M.; Spinelle, L.; Borowiak, A. Measuring Air Pollution with Low-Cost Sensors. JRC.C.5—Air and Climate Report 2017. Available online: https://publications.jrc.ec.europa.eu/repository/handle/JRC107461?mode=full (accessed on 12 November 2022).
- Williams, R.; Duvall, R.; Kilaru, V.; Hagler, G.; Hassinger, L.; Benedict, K.; Rice, K.; Kaufman, A.; Judge, R.; Pierce, G.; et al. Deliberating performance targets workshop: Potential paths for emerging PM2.5 and O3 air sensor progress. Atmos. Environ. X 2019, 2, 100031. [Google Scholar] [CrossRef] [PubMed]
- Castell, N.; Clements, A.L.; Dye, T.; Hüglin, C.; Kroll, J.H.; Lung, S.C.C.; Parsons, Z.N.M.; Penza, M.; Reisen, F.; von Schneidemesser, E.; et al. World Meteorological Organization, 2021 WMO Report No. 1215 An Update on Low-Cost Sensors for the Measurement of Atmospheric Composition; Technical report; World Meteorological Organization: Geneva, Switzerland, 2021. [Google Scholar]
- Alfano, B.; Barretta, L.; Del Giudice, A.; De Vito, S.; Di Francia, G.; Esposito, E.; Formisano, F.; Massera, E.; Miglietta, M.L.; Polichetti, T. A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives. Sensors 2020, 20, 6819. [Google Scholar] [CrossRef] [PubMed]
- Zauli-Sajani, S.; Marchesi, S.; Pironi, C.; Barbieri, C.; Poluzzi, V.; Colacci, A. Assessment of air quality sensor system performance after relocation. Atmos. Pollut. Res. 2021, 12, 282–291. [Google Scholar] [CrossRef]
- Borrego, C.; Ginja, J.; Coutinho, M.; Ribeiro, C.; Karatzas, K.; Sioumis, T.; Katsifarakis, N.; Konstantinidis, K.; De Vito, S.; Esposito, E.; et al. Assessment of air quality microsensors versus reference methods: The EuNetAir joint exercise—Part I. Atmos. Environ. 2016, 147, 246–263. [Google Scholar] [CrossRef]
- Borrego, C.; Costa, A.; Ginja, J.; Amorim, M.; Coutinho, M.; Karatzas, K.; Sioumis, T.; Katsifarakis, N.; Konstantinidis, K.; De Vito, S.; et al. Assessment of air quality microsensors versus reference methods: The EuNetAir joint exercise—Part II. Atmos. Environ. 2018, 193, 127–142. [Google Scholar] [CrossRef]
- Belosi, F.; Santachiara, G.; Prodi, F. Performance Evaluation of Four Commercial Optical Particle Counters. Atmos. Clim. Sci. 2013, 3, 41–46. [Google Scholar] [CrossRef]
- Franken, R.; Maggos, T.; Stamatelopoulou, A.; Loh, M.; Kuijpers, E.; Bartzis, J.; Steinle, S.; Cherrie, J.W.; Pronk, A. Comparison of methods for converting Dylos particle number concentrations to PM2.5 mass concentrations. Indoor Air 2019, 29, 450–459. [Google Scholar] [CrossRef] [PubMed]
- Liang, L. Calibrating low-cost sensors for ambient air monitoring: Techniques, trends, and challenges. Environ. Res. 2021, 197, 111163. [Google Scholar] [CrossRef] [PubMed]
- Dinoi, A.; Donateo, A.; Belosi, F.; Conte, M.; Contini, D. Comparison of atmospheric particle concentration measurements using different optical detectors: Potentiality and limits for air quality applications. Measurement 2017, 106, 274–282. [Google Scholar] [CrossRef]
- Zou, Y.; Clark, J.D.; May, A.A. A systematic investigation on the effects of temperature and relative humidity on the performance of eight low-cost particle sensors and devices. J. Aerosol Sci. 2021, 152, 105715. [Google Scholar] [CrossRef]
- De Vito, S.; Esposito, E.; Castell, N.; Schneider, P.; Bartonova, A. On the Robustness of Field Calibration for Smart Air Quality Monitors. Sens. Actuators B Chem. 2020, 310, 127869. [Google Scholar] [CrossRef]
- Koziel, S.; Pietrenko-Dabrowska, A.W.M.; Pankiewic, B. Field calibration of low-cost particulate matter sensors using artificial neural networks and affine response correction. Measurement 2024, 230, 114529. [Google Scholar] [CrossRef]
- Russi, L.; Guidorzi, P.; Pulvirenti, B.; Semprini, G.; Aguiari, D.; Pau, G. Air quality and comfort characterisation within an electric vehicle cabin. In Proceedings of the 2021 IEEE International Workshop on Metrology for Automotive (MetroAutomotive), Bologna, Italy, 1–2 July 2021; pp. 169–174. [Google Scholar] [CrossRef]
- Kondaveeti, H.K.; Kumaravelu, N.K.; Vanambathina, S.D.; Mathe, S.E.; Vappangi, S. A systematic literature review on prototyping with Arduino: Applications, challenges, advantages, and limitations. Comput. Sci. Rev. 2021, 40, 100364. [Google Scholar] [CrossRef]
- Kumar Sai, K.B.; Mukherjee, S.; Parveen Sultana, H. Low Cost IoT Based Air Quality Monitoring Setup Using Arduino and MQ Series Sensors With Dataset Analysis. Procedia Comput. Sci. 2019, 165, 322–327. [Google Scholar] [CrossRef]
- ARPAE Reference Measurement Site; Dataset; 2021; Available online: https://www.arpae.it/it/notizie/archivio/archivio-meteo (accessed on 12 November 2022).
- Bosch Sensortec. BME280 Combined Humidity and Pressure Sensor; Bosch Sensortec: Reutlingen, Germany, 2018. [Google Scholar]
- Li, J.; Li, H.; Ma, Y.; Wang, Y.; Abokifa, A.A.; Lu, C.; Biswas, P. Spatiotemporal distribution of indoor particulate matter concentration with a low-cost sensor network. Build. Environ. 2018, 127, 138–147. [Google Scholar] [CrossRef]
- Tryner, J.; Mehaffy, J.; Miller-Lionberg, D.; Volckens, J. Effects of aerosol type and simulated aging on performance of low-cost PM sensors. J. Aerosol Sci. 2020, 150, 105654. [Google Scholar] [CrossRef]
- Kuula, J.; Mäkelä, T.; Aurela, M.; Teinilä, K.; Varjonen, S.; González, Ó.; Timonen, H. Laboratory Evaluation of Particle-Size Selectivity of Optical Low-Cost Particulate Matter Sensors. Atmos. Meas. Tech. 2020, 13, 2413–2423. [Google Scholar] [CrossRef]
- BS ISO 16000-37:2019; Indoor Air—Part 37: Measurement of PM2.5 Mass Concentration. BSI Standards Publication: Geneva, Switzerland, 2019.
- Guthrie, W.F. NIST/SEMATECH e-Handbook of Statistical Methods (NIST Handbook 151). Dataset. 2020. Available online: https://www.itl.nist.gov/div898/handbook/ (accessed on 12 November 2022).
- Kelly, K.E.; Whitaker, J.; Petty, A.; Widmer, C.; Dybwad, A.; Sleeth, D.; Martin, R.; Butterfield, A. Ambient and Laboratory Evaluation of a Low-Cost Particulate Matter Sensor. Environ. Pollut. 2017, 221, 491–500. [Google Scholar] [CrossRef] [PubMed]
- Wakim, N.I.; Braun, T.M.; Kaye, J.A.; Dodge, H.H.; Orcatech, F. Choosing the Right Time Granularity for Analysis of Digital Biomarker Trajectories. Alzheimer’s Dement. Transl. Res. Clin. Interv. 2020, 6, e12094. [Google Scholar] [CrossRef]
- Ma, Y.; Zhu, W.; Yao, J.; Gu, C.; Bai, D.; Wang, K. Time Granularity Transformation of Time Series Data for Failure Prediction of Overhead Line. J. Phys. Conf. Ser. 2017, 787, 012031. [Google Scholar] [CrossRef]
- Weijers, E.P.; Khlystov, A.Y.; Kos, G.P.A.; Erisman, J.W. Variability of Particulate Matter Concentrations along Roads and Motorways Determined by a Moving Measurement Unit. Atmos. Environ. 2004, 38, 2993–3002. [Google Scholar] [CrossRef]
- Zikova, N.; Hopke, P.K.; Ferro, A.R. Evaluation of New Low-Cost Particle Monitors for PM2.5 Concentrations Measurements. J. Aerosol Sci. 2017, 105, 24–34. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Specifications | Summary (Day 2, Day 3) | ||||
|---|---|---|---|---|---|---|
| (Unit) | Description | Sensor | IS | ES | AS | MSR |
| Air temp. | BME280 | (21.0, 20.8) | (19.5, 19.6) | (19.1, 18.9) | (18.7, 15.8) | |
| Air rel. hum. | BME280 | (51, 43) | (55, 46) | (71, 62) | (42, 57) | |
| PM1 conc. | SPS30 | (1, 1) | (1, 1) | (0, 0) | n.d. | |
| PM2.5 conc. | SPS30 | (1.5, 1.4) | (1.4, 1.3) | (1.1, 1.1) | (5.2, 2.4) | |
| PM10 conc. | SPS30 | (2, 1) | (1, 1) | (2, 3) | (15, 6) | |
| Number conc. | SPS30 | (11, 11) | (10, 10) | (6, 8) | n.d. | |
| Number conc. | SPS30 | (11, 11) | (10, 10) | (6, 8) | n.d. | |
| Number conc. | SPS30 | (11, 11) | (10, 10) | (6, 8) | n.d. | |
| AS | IS, ES | ||
|---|---|---|---|
| Channel | Size Range (μm) | Channel | Size Range (μm) |
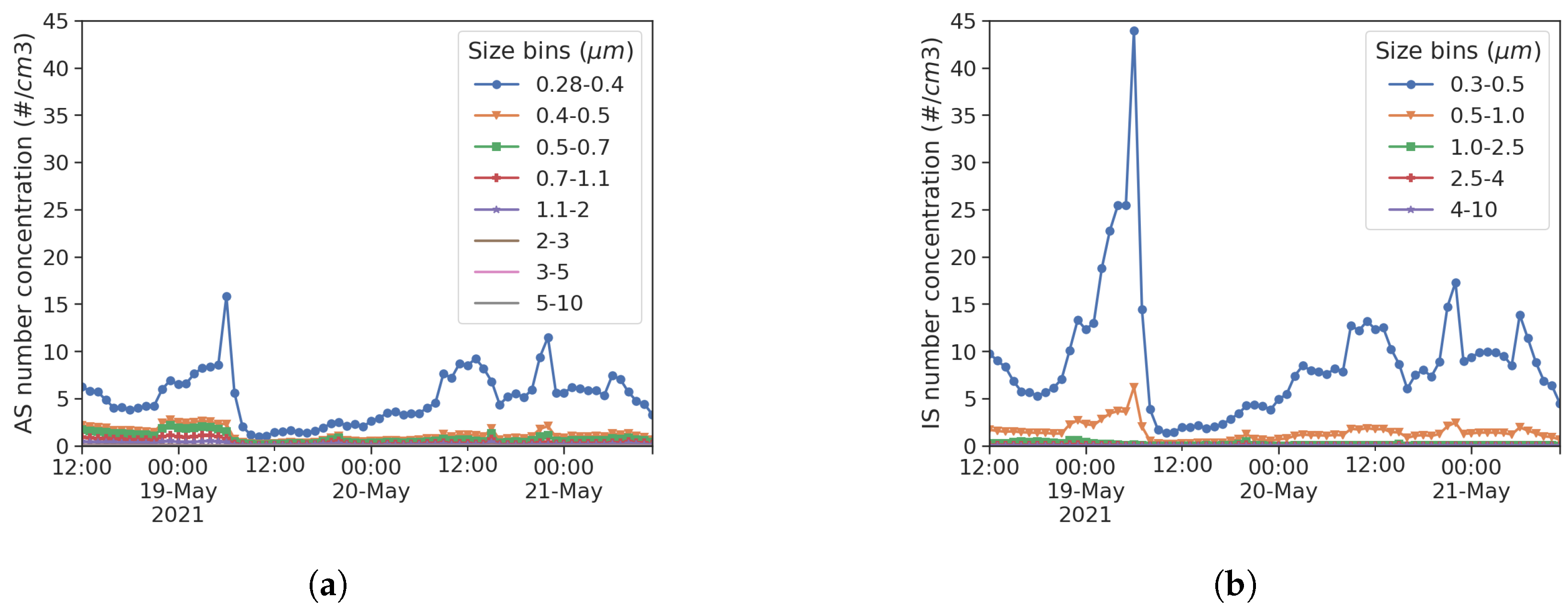
| 1 | 0.28–0.4 | 1 | 0.3–0.5 |
| 2 | 0.4–0.5 | ||
| 3 | 0.5–0.7 | 2 | 0.5–1.0 |
| 4 | 0.7–1.1 | ||
| 5 | 1.1–2.0 | 3 | 1.0–2.5 |
| 6 | 2.0–3.0 | ||
| 7 | 3.0–5.0 | 4 | 2.5–4 |
| 8 | 5.0–10 | 5 | 4.0–10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russi, L.; Guidorzi, P.; Semprini, G.; Trentini, A.; Pulvirenti, B. One-Point Calibration of Low-Cost Sensors for Particulate Air Matter (PM) Concentration Measurement. Sensors 2025, 25, 692. https://doi.org/10.3390/s25030692
Russi L, Guidorzi P, Semprini G, Trentini A, Pulvirenti B. One-Point Calibration of Low-Cost Sensors for Particulate Air Matter (PM) Concentration Measurement. Sensors. 2025; 25(3):692. https://doi.org/10.3390/s25030692
Chicago/Turabian StyleRussi, Luigi, Paolo Guidorzi, Giovanni Semprini, Arianna Trentini, and Beatrice Pulvirenti. 2025. "One-Point Calibration of Low-Cost Sensors for Particulate Air Matter (PM) Concentration Measurement" Sensors 25, no. 3: 692. https://doi.org/10.3390/s25030692
APA StyleRussi, L., Guidorzi, P., Semprini, G., Trentini, A., & Pulvirenti, B. (2025). One-Point Calibration of Low-Cost Sensors for Particulate Air Matter (PM) Concentration Measurement. Sensors, 25(3), 692. https://doi.org/10.3390/s25030692