

Fault Types and Diagnostic Methods of Manipulator Robots: A Review
 , , ,
, , , 
Abstract
1. Introduction
- (1)
- Previous reviews have not classified the types of faults and the development of diagnostic methods, but instead mostly analyzed the faults of a certain component of manipulator robots. For example, Huang et al. [35] discussed the diagnosis of compound faults in rotating machinery, and Nandi et al. [36] reviewed the state monitoring and fault diagnosis of motors, but did not analyze diagnostic methods and techniques. This review provides general guidance on this topic.
- (2)
- Previous reviews have not discussed and analyzed the overall structure of manipulator robots and the types of failures that can occur in each component. This review supplements this content.
2. Composition and Fault Types of Manipulator Robots
2.1. Faulty Components and Fault Types in Manipulator Robots
2.2. Fault Types of Manipulator Robots

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position of Faults | Types of Data | Methods for Fault Diagnosis | References |
|---|---|---|---|
| Reducer | Current signal data | Based on wavelet features and statistical analysis | [43] |
| Vibration signal data | Deep capsule graph convolutional network | [44] | |
| Vibration signal data | Generative adversarial networks and multi-scale convolutional neural networks | [45] | |
| Vibration signal data | Adaptive method of one-dimensional convolutional neural network | [46] | |
| Joint bearing | Current data | Adaptive statistical time-frequency method | [47] |
| Acceleration data | Deep perception adversarial domain adaptive method | [48] | |
| Vibration signal data | Envelope detection technology | [49] | |
| Current signal data | Feature aggregation network based on hierarchical information aggregation mechanism | [50] | |
| Vibration signal data | Four-degree-of-freedom dynamic model of compound local fault rolling bearings based on time-varying displacement | [51] | |
| Servo motor | Vibration signal data (IMI uniaxial accelerometer) | One-dimensional convolutional neural network | [52] |
| Vibration signal data, sound data | Deep convolutional neural networks, long-short term memory methods, and convolutional neural networks–long short-term memory | [53] | |
| Electric cable | Current signal data | Calculate the total sum and ratio of three-phase currents | [54] |
| Current signal data | Calculate the calculation difference fraction of the three-phase current | [55] | |
| Screw | Current signal data | Fisher score, logistic regression, and k-nearest neighbor method | [56] |
| Compound fault | Acceleration data | Combining adaptive redundant multi-wavelet packet with Hilbert transform demodulation analysis | [58] |
| Current signal data | Multi-head self-attention enhanced convolutional neural network module and long short-term memory network | [59] |
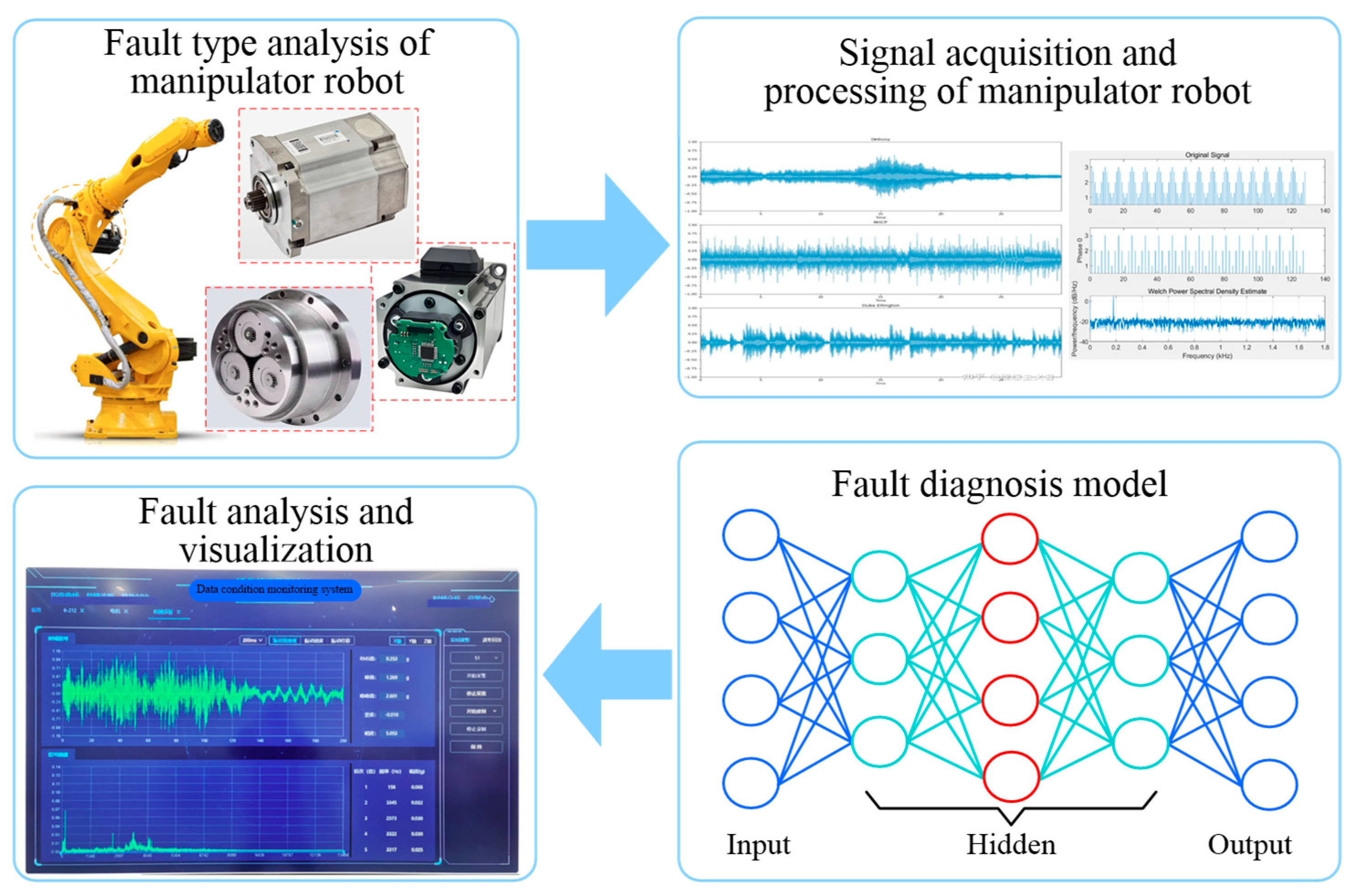
2.3. Types of Fault Signal Acquisition
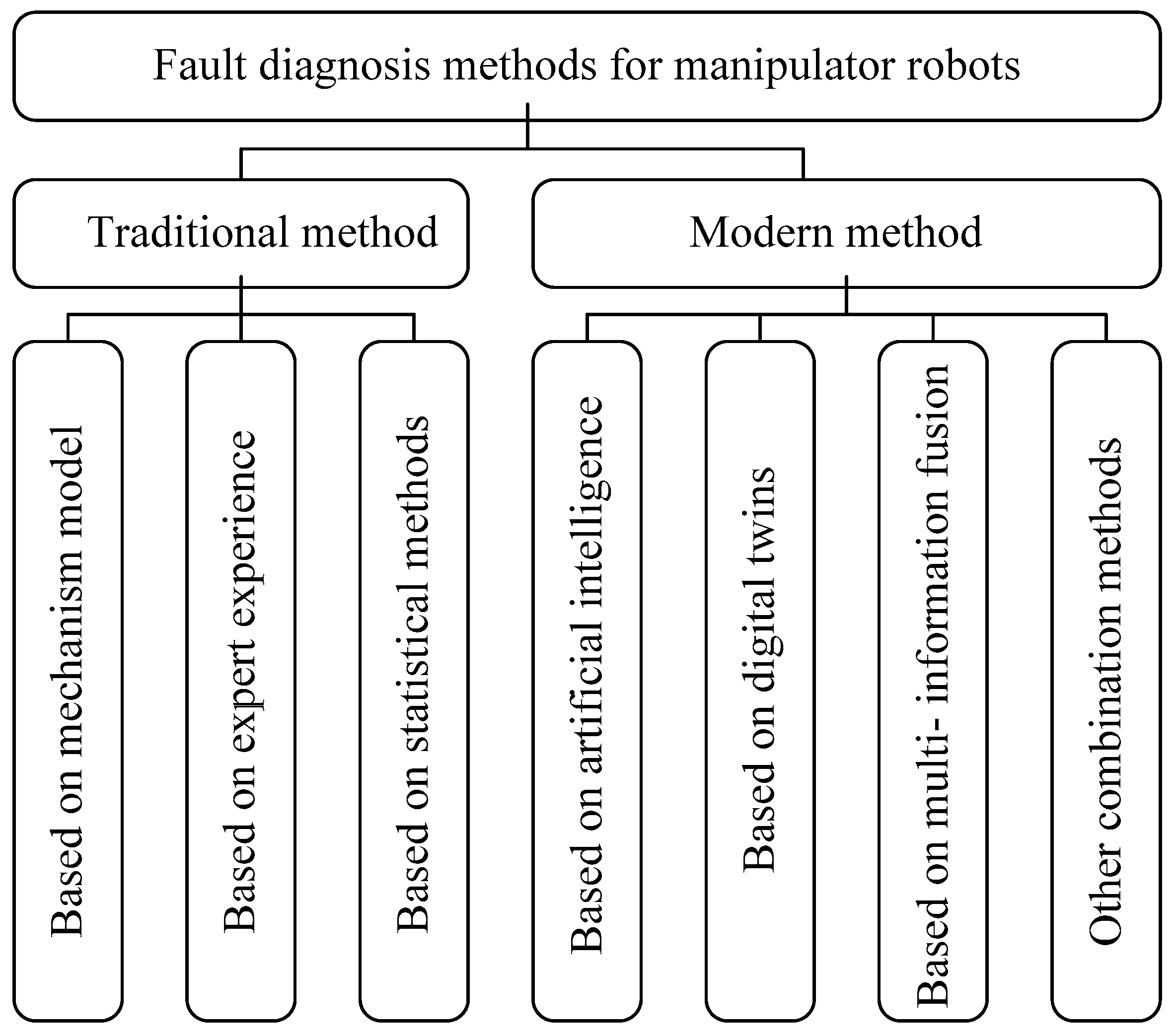
3. Fault Diagnosis Methods for Manipulator Robots
- (1)
- The first method involves comparing the operational status parameters of manipulator robots, such as abnormal temperatures, vibrations, and noises, with their historical normal operating parameters to make maintenance decisions. This diagnostic method is simple and convenient, but accuracy is relatively low.
- (2)
- The second method is to use the manipulator robot’s own state recognition and fault diagnosis mode to reflect fault information based on incorrect codes, making it easier for engineers to directly locate the type and location of the fault.
- (3)
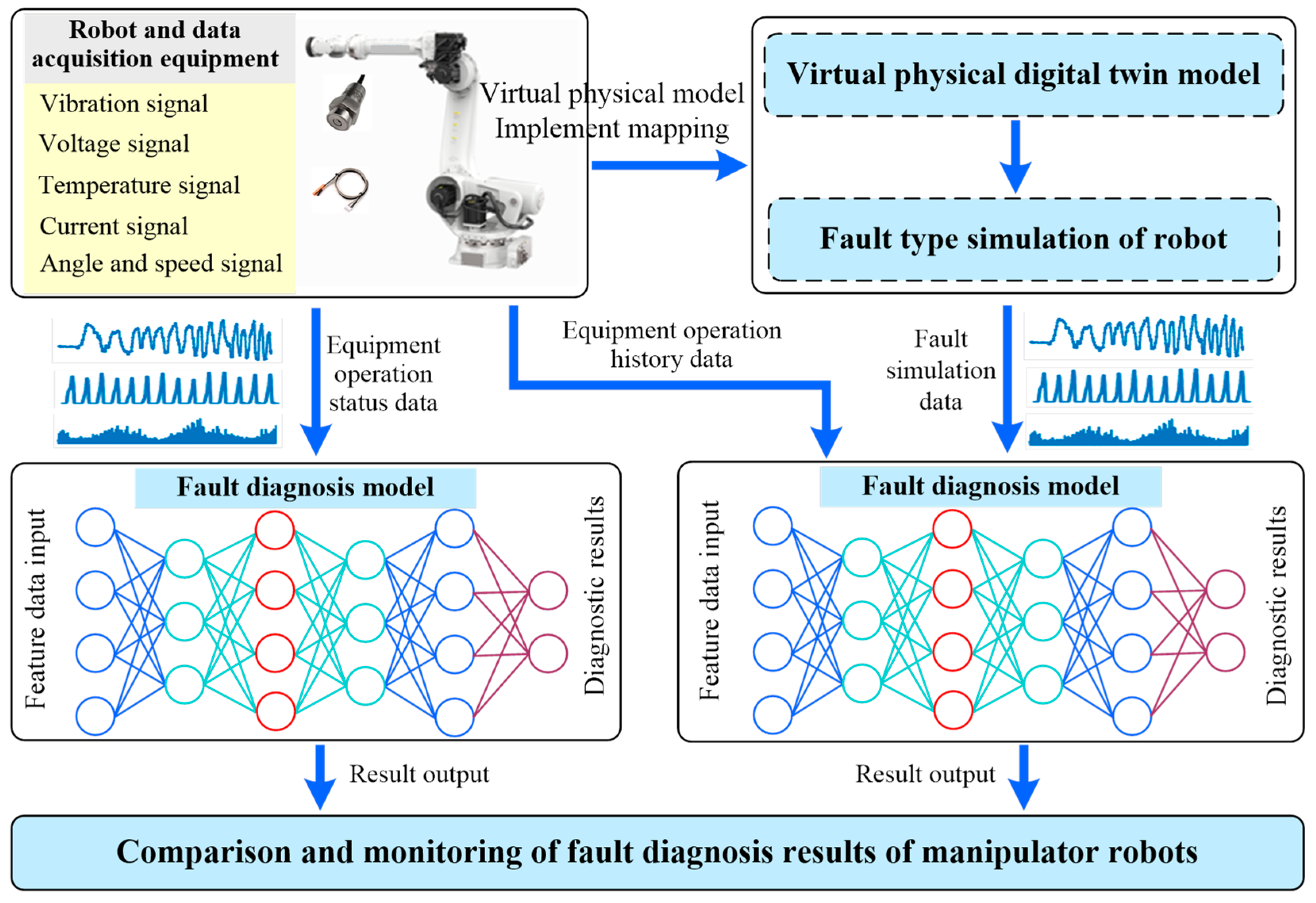
- The third method is to construct digital twins of virtual, utilizing actual manipulator robots and mapped proportional digital models, and implementing remote monitoring, providing fault diagnosis services, and maintenance support through the network.
3.1. Based on Traditional Methods
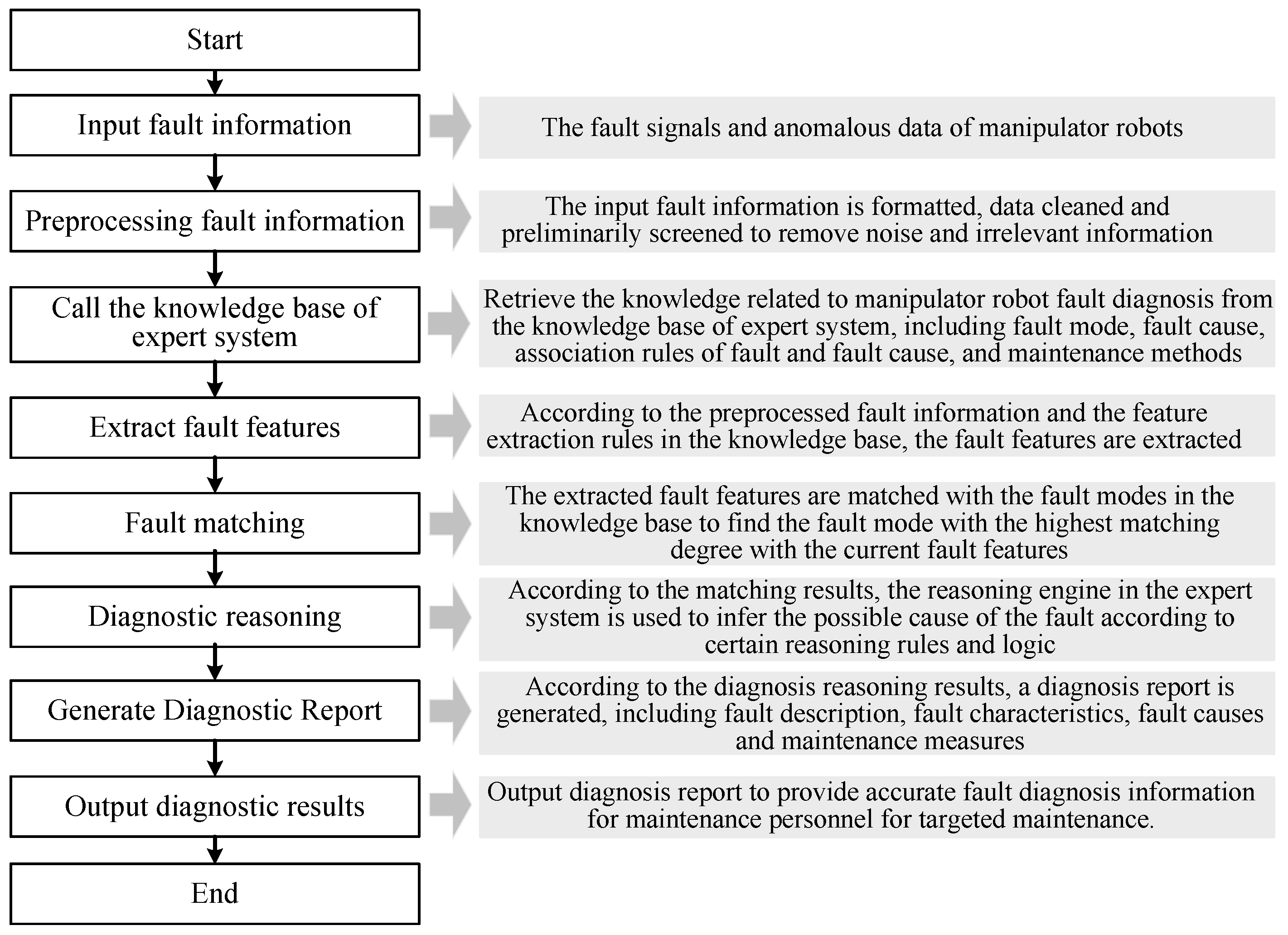
3.1.1. Method Based on Expert Experience System
3.1.2. Method Based on Statistical Models
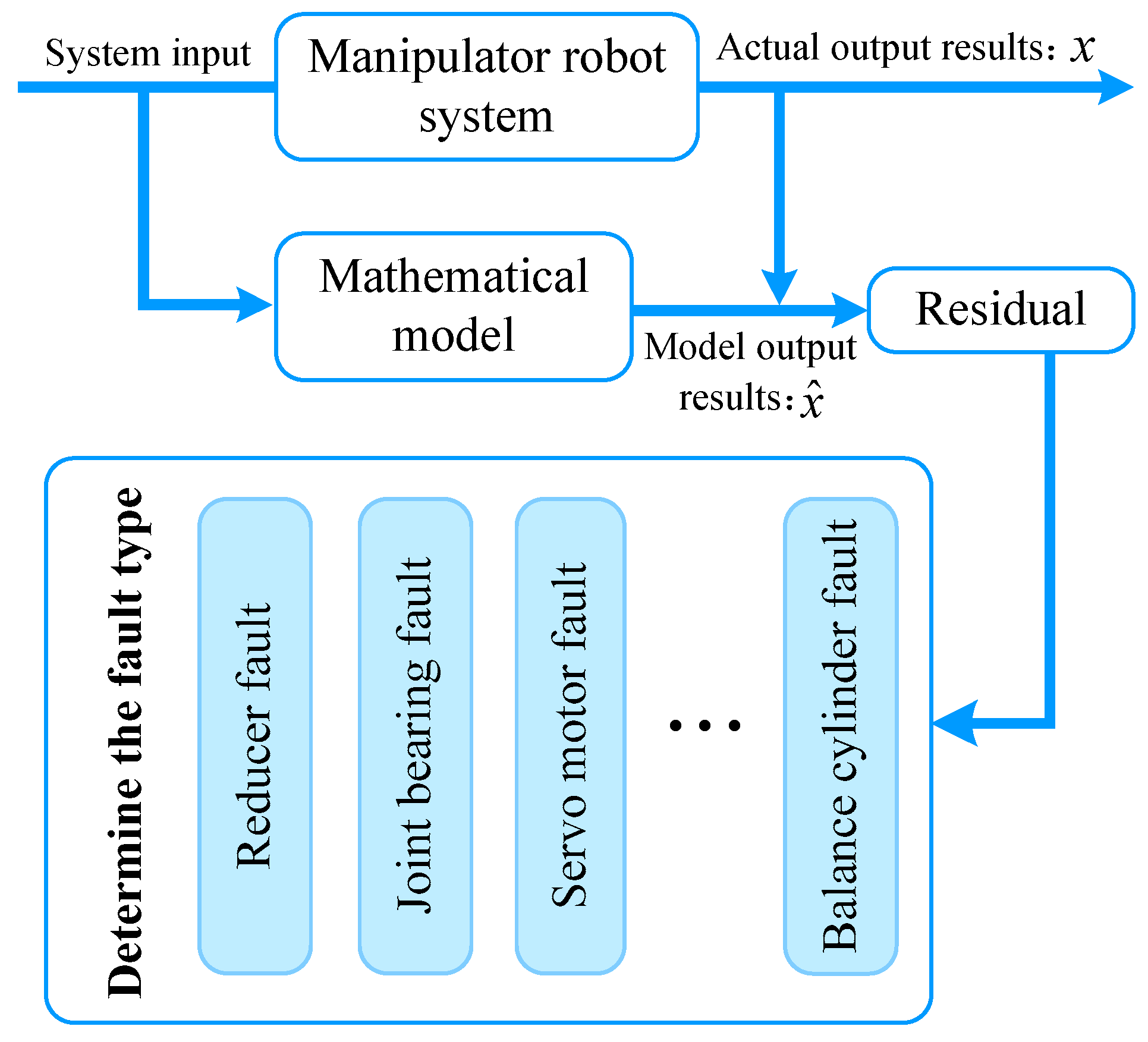
3.1.3. Method Based on Mechanism Knowledge-Driven Model
- Prediction
- Correction
3.1.4. Methods Based on Signal Processing
3.2. Based on Modern Methods
3.2.1. Method Based on Artificial Intelligence
3.2.2. Method Based on Digital Twin Technology
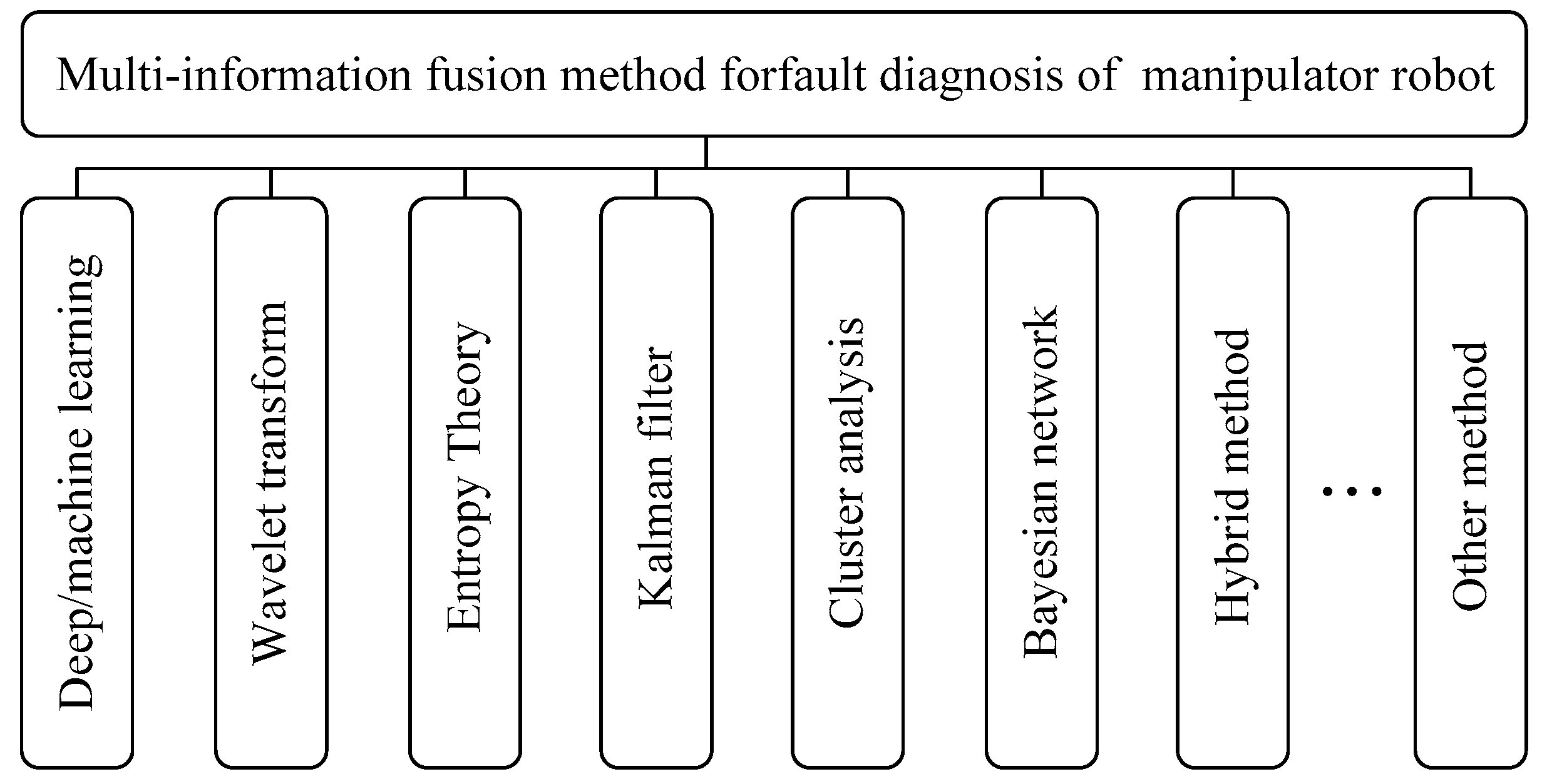
3.2.3. Method Based on Multi-Information Fusion
3.2.4. Other Methods for Manipulator Robot Fault Diagnosis
4. Discussion
4.1. Summary and Analysis
4.2. Future Expectations
5. Conclusions
- (1)
- Efficient, accurate, and stable fault diagnosis is the foundation for the practical production application of manipulator robots.
- (2)
- The integration of multi-information fusion and artificial intelligence algorithms can compensate for the shortcomings of single signals that fail to effectively reflect fault characteristics of manipulator robots, as well as the challenges posed by traditional algorithms in handling composite faults. However, improvements are still needed in data fusion strategies and the computational time cost of models.
- (3)
- Digital twin technology can achieve remote monitoring of the operational status, fault diagnosis, and predictive maintenance of manipulator robot systems.
- (4)
- Establishing and refining a quantitative assessment system for fault diagnosis of manipulator robots under different operating conditions and environments can enhance production efficiency and reduce production costs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RV | Rotary Vector |
| CNN | Convolutional neural network |
| GCN | Graph convolutional network |
| LSTM | Long short-term memory |
| DBN | Deep belief network |
| MCNN | Multichannel convolutional neural network |
| IoRT | Internet of robotic things |
| PCA | Principle component analysis |
| PLC | Programmable logic controller |
| CAD | Computer aided technology |
References
- Arents, J.; Greitans, M. Smart Industrial Robot Control Trends, Challenges and Opportunities Within Manufacturing. Appl. Sci. 2022, 12, 937. [Google Scholar] [CrossRef]
- Zhong, R.Y.; Xu, X.; Klotz, E.; Newman, S.T. Intelligent Manufacturing in the Context of Industry 4.0: A Review. Engineering 2017, 3, 616–630. [Google Scholar] [CrossRef]
- Wang, B.; Tao, F.; Fang, X.; Liu, C.; Liu, Y.; Freiheit, T. Smart Manufacturing and Intelligent Manufacturing: A Comparative Review. Engineering 2021, 7, 738–757. [Google Scholar] [CrossRef]
- Deng, J.; Wang, T.; Wang, Z.; Zhou, J.; Cheng, L. Research on Event Logic Knowledge Graph Construction Method of Robot Transmission System Fault Diagnosis. IEEE Access 2022, 10, 17656–17673. [Google Scholar] [CrossRef]
- Cheon, E.J.; Schneiders, E.; Skov, M.B. Working with Bounded Collaboration: A Qualitative Study on How Collaboration Is Co-Constructed around Collaborative Robots in Industry. In Proceedings of the ACM on Human-Computer Interaction; Association for Computing Machinery: New York, NY, USA, 2022; Volume 6, pp. 1–34. [Google Scholar]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human–Robot Interaction in Industrial Collaborative Robotics: A Literature Review of the Decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on Human–Robot Collaboration in Industrial Settings: Safety, Intuitive Interfaces and Applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Yang, Q.; Li, X.; Cai, H.; Hsu, Y.M.; Lee, J.; Yang, C.H.; Li, Z.L.; Lin, M.Y. Fault Prognosis of Industrial Robots in Dynamic Working Regimes: Find Degradation in Variations. Meas. J. Int. Meas. Confed. 2021, 173, 108545. [Google Scholar] [CrossRef]
- Ruan, D.; Wang, J.; Yan, J.; Gühmann, C. CNN Parameter Design Based on Fault Signal Analysis and Its Application in Bearing Fault Diagnosis. Adv. Eng. Inform. 2023, 55, 101877. [Google Scholar] [CrossRef]
- Wang, X.; Liu, M.; Liu, C.; Ling, L.; Zhang, X. Data-Driven and Knowledge-Based Predictive Maintenance Method for Industrial Robots for the Production Stability of Intelligent Manufacturing. Expert Syst. Appl. 2023, 234, 121136. [Google Scholar] [CrossRef]
- Lu, K.; Chen, C.; Wang, T.; Cheng, L.; Qin, J. Fault Diagnosis of Industrial Robot Based on Dual-Module Attention Convolutional Neural Network. Auton. Intell. Syst. 2022, 2, 1–12. [Google Scholar] [CrossRef]
- Campilho, R.D.S.G.; Silva, F.J.G. Industrial Process Improvement by Automation and Robotics. Machines 2023, 11, 1011. [Google Scholar] [CrossRef]
- Fasuludeen Kunju, F.K.; Naveed, N.; Anwar, M.N.; Ul Haq, M.I. Production and Maintenance in Industries: Impact of Industry 4.0. Ind. Robot 2022, 49, 461–475. [Google Scholar] [CrossRef]
- Nagy, M.; Lăzăroiu, G.; Valaskova, K. Machine Intelligence and Autonomous Robotic Technologies in the Corporate Context of SMEs: Deep Learning and Virtual Simulation Algorithms, Cyber-Physical Production Networks, and Industry 4.0-Based Manufacturing Systems. Appl. Sci. 2023, 13, 1681. [Google Scholar] [CrossRef]
- Xue, S.; Du, C.; Yang, C. Health Management System for the Industrial Robot Control Cabinet. In Proceedings of the 2024 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2024; pp. 142–146. [Google Scholar]
- Eang, C.; Lee, S. Predictive Maintenance and Fault Detection for Motor Drive Control Systems in Industrial Robots Using CNN-RNN-Based Observers. Sensors 2025, 25, 25. [Google Scholar] [CrossRef]
- Kumar, P.; Khalid, S.; Kim, H.S. Prognostics and Health Management of Rotating Machinery of Industrial Robot with Deep Learning Applications—A Review. Mathematics 2023, 11, 3008. [Google Scholar] [CrossRef]
- Abid, A.; Khan, M.T.; Iqbal, J. A Review on Fault Detection and Diagnosis Techniques: Basics and Beyond. Artif. Intell. Rev. 2021, 54, 3639–3664. [Google Scholar] [CrossRef]
- Mustafa, F.E.; Khan, A.Q.; Samee, A.; Ahmed, I.; Abid, M.; Alqahtani, M.M.; Khalid, M. Advanced Statistical and Meta-Heuristic Based Optimization Fault Diagnosis Techniques in Complex Industrial Processes: A Comparative Analysis. IEEE Access 2023, 11, 104373–104391. [Google Scholar] [CrossRef]
- Fernandes, M.; Corchado, J.M.; Marreiros, G. Machine Learning Techniques Applied to Mechanical Fault Diagnosis and Fault Prognosis in the Context of Real Industrial Manufacturing Use-Cases: A Systematic Literature Review. Appl. Intell. 2022, 52, 14246–14280. [Google Scholar] [CrossRef]
- Deebak, B.D.; Al-Turjman, F. Digital-Twin Assisted: Fault Diagnosis Using Deep Transfer Learning for Machining Tool Condition. Int. J. Intell. Syst. 2022, 37, 10289–10316. [Google Scholar] [CrossRef]
- Guo, K.; Wan, X.; Liu, L.; Gao, Z.; Yang, M. Fault Diagnosis of Intelligent Production Line Based on Digital Twin and Improved Random Forest. Appl. Sci. 2021, 11, 7733. [Google Scholar] [CrossRef]
- Long, J.; Mou, J.; Zhang, L.; Zhang, S.; Li, C. Attitude Data-Based Deep Hybrid Learning Architecture for Intelligent Fault Diagnosis of Multi-Joint Industrial Robots. J. Manuf. Syst. 2021, 61, 736–745. [Google Scholar] [CrossRef]
- Bo, W.; Jiaxu, W.; Guangwu, Z.; Rongsong, Y.; Hongjun, Z.; Tao, H. Mixed Lubrication Analysis of Modified Cycloidal Gear Used in the RV Reducer. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2016, 230, 121–134. [Google Scholar] [CrossRef]
- Yan, B.; Dong, L.; Yan, K.; Chen, F.; Zhu, Y.; Wang, D. Effects of Oil-Air Lubrication Methods on the Internal Fluid Flow and Heat Dissipation of High-Speed Ball Bearings. Mech. Syst. Signal Process. 2021, 151, 107409. [Google Scholar] [CrossRef]
- Pinto, R.; Cerquitelli, T. Robot Fault Detection and Remaining Life Estimation for Predictive Maintenance. Procedia Comput. Sci. 2019, 151, 709–716. [Google Scholar] [CrossRef]
- Moore, J.; Sawyer, D. Equipment Health Monitoring for Industrial Robotic Arms. In Proceedings of the 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), Bari, Italy, 28 August–1 September 2024; pp. 1853–1860. [Google Scholar]
- Sanfilippo, F.; Hatledal, L.I.; Zhang, H.; Fago, M.; Pettersen, K.Y. Controlling Kuka Industrial Robots: Flexible Communication Interface JOpenShowVar. IEEE Robot. Autom. Mag. 2015, 22, 96–109. [Google Scholar] [CrossRef]
- Chen, L.; Cao, J.; Wu, K.; Zhang, Z. Application of Generalized Frequency Response Functions and Improved Convolutional Neural Network to Fault Diagnosis of Heavy-Duty Industrial Robot. Robot. Comput. Integr. Manuf. 2022, 73, 102228. [Google Scholar] [CrossRef]
- Wu, Y.; Bai, Y.; Yang, S.; Li, C. Extracting Random Forest Features with Improved Adaptive Particle Swarm Optimization for Industrial Robot Fault Diagnosis. Meas. J. Int. Meas. Confed. 2024, 229, 114451. [Google Scholar] [CrossRef]
- Khalastchi, E.; Kalech, M. On Fault Detection and Diagnosis in Robotic Systems. ACM Comput. Surv. 2018, 51, 1–24. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Wang, Y.; Sun, Y.; Sun, G. Intelligent Joint Actuator Fault Diagnosis for Heavy-Duty Industrial Robots. IEEE Sens. J. 2024, 24, 15292–15301. [Google Scholar] [CrossRef]
- Kim, Y.; Park, J.; Na, K.; Yuan, H.; Youn, B.D.; Kang, C. soon Phase-Based Time Domain Averaging (PTDA) for Fault Detection of a Gearbox in an Industrial Robot Using Vibration Signals. Mech. Syst. Signal Process. 2020, 138, 106544. [Google Scholar] [CrossRef]
- Appana, D.K.; Prosvirin, A.; Kim, J.M. Reliable Fault Diagnosis of Bearings with Varying Rotational Speeds Using Envelope Spectrum and Convolution Neural Networks. Soft Comput. 2018, 22, 6719–6729. [Google Scholar] [CrossRef]
- Huang, R.; Xia, J.; Zhang, B.; Chen, Z.; Li, W. Compound Fault Diagnosis for Rotating Machinery: State-of-the-Art, Challenges, and Opportunities. J. Dyn. Monit. Diagnostics 2023, 2, 13–29. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Induction Motors: A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Pan, M.C.; Van Brussel, H.; Sas, P. Intelligent Joint Fault Diagnosis of Industrial Robots. Mech. Syst. Signal Process. 1998, 12, 571–588. [Google Scholar] [CrossRef]
- Hsu, H.K.; Ting, H.Y.; Huang, M.B.; Huang, H.P. Intelligent Fault Detection, Diagnosis and Health Evaluation for Industrial Robots. Mechanika 2021, 27, 70–79. [Google Scholar] [CrossRef]
- Schneider, H.; Frank, P.M. Observer-Based Supervision and Fault Detection in Robots Using Nonlinear and Fuzzy Logic Residual Evaluation. IEEE Trans. Control Syst. Technol. 1996, 4, 274–282. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Kang, C. Analysis of Industrial Accidents Causing through Jamming or Crushing Accidental Deaths in the Manufacturing Industry in South Korea: Focus on Non-Routine Work on Machinery. Saf. Sci. 2021, 133, 104998. [Google Scholar] [CrossRef]
- Han, H.; Xu, Q.; Li, D.; Li, B.; Sun, X. Fault Diagnosis of RV Reducers Used in Industrial Robots Based on Vibration Analysis. In Proceedings of the International conference on the Efficiency and Performance Engineering Network, Baotou, China, 18–21 August 2022; Springer: Berlin/Heidelberg, Germany, 2022; Volume 1, pp. 306–317. [Google Scholar]
- Vallachira, S.; Orkisz, M.; Norrlof, M.; Butail, S. Data-Driven Gearbox Failure Detection in Industrial Robots. IEEE Trans. Ind. Inform. 2020, 16, 193–201. [Google Scholar] [CrossRef]
- Rohan, A.; Raouf, I.; Kim, H.S. Rotate Vector (Rv) Reducer Fault Detection and Diagnosis System: Towards Component Level Prognostics and Health Management (Phm). Sensors 2020, 20, 6845. [Google Scholar] [CrossRef]
- Yang, G.; Tao, H.; Du, R.; Zhong, Y. Compound Fault Diagnosis of Harmonic Drives Using Deep Capsule Graph Convolutional Network. IEEE Trans. Ind. Electron. 2023, 70, 4186–4195. [Google Scholar] [CrossRef]
- Yang, G.; Zhong, Y.; Yang, L.; Tao, H.; Li, J.; Du, R. Fault Diagnosis of Harmonic Drive with Imbalanced Data Using Generative Adversarial Network. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, H.C.; He, Y.M.; Huang, S.F.; Zhu, Z.H.; Chen, J.H. Harmonic Reducer In-Situ Fault Diagnosis for Industrial Robots Based on Deep Learning. Sci. China Technol. Sci. 2022, 65, 2116–2126. [Google Scholar] [CrossRef]
- Yazici, B.; Kliman, G.B.; Premerlani, W.J.; Koegl, R.A.; Robinson, G.B.; Abdel-Malek, A. An Adaptive, on-Line, Statistical Method for Bearing Fault Detection Using Stator Current. In Proceedings of the IEEE Transactions on Instrumentation and Measurement, New Orleans, Lousiana, 5–9 October 1997; Volume 70, pp. 213–220. [Google Scholar]
- Xia, B.; Wang, K.; Xu, A.; Zeng, P.; Yang, N.; Li, B. Intelligent Fault Diagnosis for Bearings of Industrial Robot Joints Under Varying Working Conditions Based on Deep Adversarial Domain Adaptation. IEEE Trans. Instrum. Meas. 2022, 71, 1–13. [Google Scholar] [CrossRef]
- McInerny, S.A.; Dai, Y. Basic Vibration Signal Processing for Bearing Fault Detection. IEEE Trans. Educ. 2003, 46, 149–156. [Google Scholar] [CrossRef]
- Raouf, I.; Kumar, P.; Kim, H.S. Deep Learning-Based Fault Diagnosis of Servo Motor Bearing Using the Attention-Guided Feature Aggregation Network. Expert Syst. Appl. 2024, 258, 125137. [Google Scholar] [CrossRef]
- Zhang, X.; Yan, C.; Liu, Y.; Yan, P.; Wang, Y.; Wu, L. Dynamic Modeling and Analysis of Rolling Bearing with Compound Fault on Raceway and Rolling Element. Shock Vib. 2020, 2020, 8861899. [Google Scholar] [CrossRef]
- Junior, R.F.R.; Areias, I.A.d.S.; Campos, M.M.; Teixeira, C.E.; da Silva, L.E.B.; Gomes, G.F. Fault Detection and Diagnosis in Electric Motors Using 1d Convolutional Neural Networks with Multi-Channel Vibration Signals. Meas. J. Int. Meas. Confed. 2022, 190, 12–14. [Google Scholar] [CrossRef]
- Suawa, P.; Meisel, T.; Jongmanns, M.; Huebner, M.; Reichenbach, M. Modeling and Fault Detection of Brushless Direct Current Motor by Deep Learning Sensor Data Fusion. Sensors 2022, 22, 3516. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.; Kim, S.W. Current Only-Based Fault Diagnosis Method for Industrial Robot Control Cables. Sensors 2022, 22, 1917. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.; Kim, S.; Kim, S.W. Attention Recurrent Neural Network-Based Severity Estimation Method for Early-Stage Fault Diagnosis in Robot Harness Cable. Sensors 2023, 23, 5299. [Google Scholar] [CrossRef]
- Yang, Q.; Li, X.; Wang, Y.; Ainapure, A.; Lee, J. Fault Diagnosis of Ball Screw in Industrial Robots Using Non-Stationary Motor Current Signals. Procedia Manuf. 2020, 48, 1102–1108. [Google Scholar] [CrossRef] [PubMed]
- Gawde, S.; Patil, S.; Kumar, S.; Kamat, P.; Kotecha, K.; Abraham, A. Multi-Fault Diagnosis of Industrial Rotating Machines Using Data-Driven Approach: A Review of Two Decades of Research. Eng. Appl. Artif. Intell. 2023, 123, 106139. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Zhou, Z.; Zi, Y.; Wang, Y.; Wang, X. Multifractal Entropy Based Adaptive Multiwavelet Construction and Its Application for Mechanical Compound-Fault Diagnosis. Mech. Syst. Signal Process. 2016, 76–77, 742–758. [Google Scholar] [CrossRef]
- Zhou, X.; Zeng, H.; Chen, C.; Xiao, H.; Xiang, Z. An Attention-Enhanced Multi-Modal Deep Learning Algorithm for Robotic Compound Fault Diagnosis. Meas. Sci. Technol. 2023, 34, 014007. [Google Scholar] [CrossRef]
- He, Y.; Zhao, C.; Zhou, X.; Shen, W. MJAR: A Novel Joint Generalization-Based Diagnosis Method for Industrial Robots with Compound Faults. Robot. Comput. Integr. Manuf. 2024, 86, 102668. [Google Scholar] [CrossRef]
- Chen, C.; Wang, T.; Liu, C.; Liu, Y.; Cheng, L. Lightweight Convolutional Transformers Enhanced Meta-Learning for Compound Fault Diagnosis of Industrial Robot. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Cheng, F.; Raghavan, A.; Jung, D.; Sasaki, Y.; Tajika, Y. High-Accuracy Unsupervised Fault Detection of Industrial Robots Using Current Signal Analysis. In Proceedings of the 2019 IEEE International Conference on Prognostics and Health Management (ICPHM), San Francisco, CA, USA, 17–20 June 2019; pp. 1–8. [Google Scholar]
- Goyal, D.; Choudhary, A.; Pabla, B.S.; Dhami, S.S. Support Vector Machines Based Non-Contact Fault Diagnosis System for Bearings. J. Intell. Manuf. 2020, 31, 1275–1289. [Google Scholar] [CrossRef]
- Gawde, S.; Patil, S.; Kumar, S.; Kotecha, K. A Scoping Review on Multi-Fault Diagnosis of Industrial Rotating Machines Using Multi-Sensor Data Fusion. Artif. Intell. Rev. 2023, 56, 4711–4764. [Google Scholar] [CrossRef]
- Hassan, I.U.; Panduru, K.; Walsh, J. An In-Depth Study of Vibration Sensors for Condition Monitoring. Sensors 2024, 24, 740. [Google Scholar] [CrossRef]
- Emre, Y.; Gürsel, N.; Gümüs, L. Intelligent Worm Gearbox Fault Diagnosis under Various Working Conditions Using Vibration, Sound and Thermal Features. Appl. Acoust. 2022, 186, 108463. [Google Scholar]
- Yun, H.; Kim, H.; Jeong, Y.H.; Jun, M.B.G. Autoencoder-Based Anomaly Detection of Industrial Robot Arm Using Stethoscope Based Internal Sound Sensor. J. Intell. Manuf. 2023, 34, 1427–1444. [Google Scholar] [CrossRef]
- Fedorova, D.; Tlach, V.; Kuric, I.; Dodok, T.; Zajačko, I.; Tucki, K. Technical Diagnostics of Industrial Robots Using Vibration Signals: Case Study on Detecting Base Unfastening. Appl. Sci. 2025, 15, 270. [Google Scholar] [CrossRef]
- Algburi, R.N.A.; Gao, H. Health Assessment and Fault Detection System for an Industrial Robot Using the Rotary Encoder Signal. Energies 2019, 12, 2816. [Google Scholar] [CrossRef]
- Islam, S.; Kim, M.; Ku, K.; Kim, H.; Kim, K. Study on Fault Diagnosis and Data Processing Techniques for Substrate Transfer Robots Using Vibration Sensor Data. J. Microelectron. Packag. Soc. 2024, 31, 45–53. [Google Scholar]
- Schoen, R.R.; Habetler, T.G.; Kamran, F.; Bartheld, R.G. Motor Bearing Damage Detection Using Stator Current Monitoring. IEEE Trans. Ind. Appl. 1995, 31, 1274–1279. [Google Scholar] [CrossRef]
- Long, J.; Qin, Y.; Yang, Z.; Huang, Y.; Li, C. Discriminative Feature Learning Using a Multiscale Convolutional Capsule Network from Attitude Data for Fault Diagnosis of Industrial Robots. Mech. Syst. Signal Process. 2023, 182, 109569. [Google Scholar] [CrossRef]
- Zhang, J.; Luo, Y.; Wang, B.; Lu, C.; Si, J.; Song, J. Deep Reinforcement Learning for Load Shedding Against Short-Term Voltage Instability in Large Power Systems. IEEE Trans. Neural Networks Learn. Syst. 2023, 34, 4249–4260. [Google Scholar] [CrossRef]
- Yu, L.; Yao, X.; Yang, J.; Li, C. Gear Fault Diagnosis through Vibration and Acoustic Signal Combination Based on Convolutional Neural Network. Information 2020, 11, 266. [Google Scholar] [CrossRef]
- Visinsky, M.L.; Cavallaro, J.R.; Walker, I.D. Expert System Framework for Fault Detection and Fault Tolerance in Robotics. Comput. Electr. Eng. 1994, 20, 421–435. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, J. Integrated Fault Diagnosis Method of Mobile Robot. Commun. Comput. Inf. Sci. 2011, 164, 372–379. [Google Scholar]
- Sun, X.; Jia, X. A Fault Diagnosis Method of Industrial Robot Rolling Bearing Based on Data Driven and Random Intuitive Fuzzy Decision. IEEE Access 2019, 7, 148764–148770. [Google Scholar] [CrossRef]
- Wu, Y.; Fu, Z.; Fei, J. Fault Diagnosis for Industrial Robots Based on a Combined Approach of Manifold Learning, Treelet Transform and Naive Bayes. Rev. Sci. Instrum. 2020, 91, 015116. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Y.; Wan, J.; Liu, X.; Song, Z. Industrial Big Data for Fault Diagnosis: Taxonomy, Review, and Applications. IEEE Access 2017, 5, 17368–17380. [Google Scholar] [CrossRef]
- Piltan, F.; Prosvirin, A.E.; Sohaib, M.; Saldivar, B.; Kim, J.M. An SVM-Based Neural Adaptive Variable Structure Observer for Fault Diagnosis and Fault-Tolerant Control of a Robot Manipulator. Appl. Sci. 2020, 10, 1344. [Google Scholar] [CrossRef]
- Moshgani, S.M.H.; Fakharian, A. Fault Detection and Isolation for Manipulator Robot Using Optimal Unknown Input Observer. Control Eng. Appl. Inform. 2019, 21, 71–79. [Google Scholar]
- Sadeghzadeh-Nokhodberiz, N.; Poshtan, J. Distributed Interacting Multiple Filters for Fault Diagnosis of Navigation Sensors in a Robotic System. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1383–1393. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, G.; Li, L.; Diao, D. AEKF-Based Trajectory-Error Compensation of Knee Exoskeleton for Human–Exoskeleton Interaction Control. Robot. Intell. Autom. 2024, 44, 84–95. [Google Scholar] [CrossRef]
- Van, M.; Wu, D.; Ge, S.S.; Ren, H. Fault Diagnosis in Image-Based Visual Servoing with Eye-in-Hand Configurations Using Kalman Filter. IEEE Trans. Ind. Inform. 2016, 12, 1998–2007. [Google Scholar] [CrossRef]
- Zhang, T.; Shi, P.; Li, W.; Yue, X. Adaptive EKF Enhanced Fault Diagnosis and Fault Tolerant Control for Space Manipulators with Position Measurements Only. J. Franklin Inst. 2024, 361, 106824. [Google Scholar] [CrossRef]
- Betta, G.; Liguori, C.; Paolillo, A.; Pietrosanto, A. A DSP-Based FFT-Analyzer for the Fault Diagnosis of Rotating Machine Based on Vibration Analysis. IEEE Trans. Instrum. Meas. 2002, 51, 1316–1321. [Google Scholar] [CrossRef]
- Chen, L.; Wen, S.; Wang, H.; Hu, H. Fault Mechanism Analysis and Diagnosis for Closed-Loop Drive System of Industrial Robot Based on Nonlinear Spectrum. Sci. Rep. 2022, 12, 18350. [Google Scholar] [CrossRef] [PubMed]
- Pappachan, B.K.; Caesarendra, W.; Tjahjowidodo, T.; Wijaya, T. Frequency Domain Analysis of Sensor Data for Event Classification in Real-Time Robot Assisted Deburring. Sensors 2017, 17, 1247. [Google Scholar] [CrossRef] [PubMed]
- Qiao, W.; Lu, D. A Survey on Wind Turbine Condition Monitoring and Fault Diagnosis—Part II: Signals and Signal Processing Methods. IEEE Trans. Ind. Electron. 2015, 62, 6546–6557. [Google Scholar] [CrossRef]
- Ding, K.; Chen, X.; Jiang, M.; Yang, H.; Chen, X.; Zhang, J.; Gao, R.; Cui, L. Feature Extraction and Fault Diagnosis of Photovoltaic Array Based on Current–Voltage Conversion. Appl. Energy 2024, 353, 122135. [Google Scholar] [CrossRef]
- Banerjee, T.P.; Das, S. Multi-Sensor Data Fusion Using Support Vector Machine for Motor Fault Detection. Inf. Sci. 2012, 217, 96–107. [Google Scholar] [CrossRef]
- Aherwar, A. An Investigation on Gearbox Fault Detection Using Vibration Analysis Techniques: A Review. Aust. J. Mech. Eng. 2012, 10, 169–183. [Google Scholar] [CrossRef]
- Al Kazzaz, S.A.S.; Singh, G.K. Experimental Investigations on Induction Machine Condition Monitoring and Fault Diagnosis Using Digital Signal Processing Techniques. Electr. Power Syst. Res. 2003, 65, 197–221. [Google Scholar] [CrossRef]
- Chen, K.; Huang, C.; He, J. Fault Detection, Classification and Location for Transmission Lines and Distribution Systems: A Review on the Methods. High Volt. 2016, 1, 25–33. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, H.; Li, Z. A New Compound Faults Detection Method for Rolling Bearings Based on Empirical Wavelet Transform and Chaotic Oscillator. Chaos Solitons Fractals 2016, 89, 8–19. [Google Scholar] [CrossRef]
- Wan, S.; Zhang, X.; Dou, L. Compound Fault Diagnosis of Bearings Using Improved Fast Spectral Kurtosis with VMD. J. Mech. Sci. Technol. 2018, 32, 5189–5199. [Google Scholar] [CrossRef]
- Haiyang, Z.; Jindong, W.; Lee, J.; Ying, L. A Compound Interpolation Envelope Local Mean Decomposition and Its Application for Fault Diagnosis of Reciprocating Compressors. Mech. Syst. Signal Process. 2018, 110, 273–295. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Z.; Alippi, C.; Huang, B.; Liu, D. Explainable Intelligent Fault Diagnosis for Nonlinear Dynamic Systems: From Unsupervised to Supervised Learning. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 6166–6179. [Google Scholar] [CrossRef]
- Maurya, M.; Panigrahi, I.; Dash, D.; Malla, C. Intelligent Fault Diagnostic System for Rotating Machinery Based on IoT with Cloud Computing and Artificial Intelligence Techniques: A Review. Soft Comput. 2024, 28, 477–494. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A Motor Current Signal-Based Bearing Fault Diagnosis Using Deep Learning and Information Fusion. IEEE Trans. Instrum. Meas. 2020, 69, 3325–3333. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of Machine Learning to Machine Fault Diagnosis: A Review and Roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Zhu, Z.; Lei, Y.; Qi, G.; Chai, Y.; Mazur, N.; An, Y.; Huang, X. A Review of the Application of Deep Learning in Intelligent Fault Diagnosis of Rotating Machinery. Meas. J. Int. Meas. Confed. 2023, 206, 112346. [Google Scholar] [CrossRef]
- Bai, B.; Li, Z.; Wu, Q.; Zhou, C.; Zhang, J. Fault Data Screening and Failure Rate Prediction Framework-Based Bathtub Curve on Industrial Robots. Ind. Robot 2020, 47, 867–880. [Google Scholar] [CrossRef]
- He, F.; Ye, Q. A Bearing Fault Diagnosis Method Based on Wavelet Packet Transform and Convolutional Neural Network Optimized by Simulated Annealing Algorithm. Sensors 2022, 22, 1410. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Multireceptive Field Graph Convolutional Networks for Machine Fault Diagnosis. IEEE Trans. Ind. Electron. 2021, 68, 12739–12749. [Google Scholar] [CrossRef]
- Jiao, J.; Zheng, X.J. Fault Diagnosis Method for Industrial Robots Based on DBN Joint Information Fusion Technology. Comput. Intell. Neurosci. 2022, 2022, 4340817. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, K.; Wu, J.; Deng, C.; Wang, Y. Residual Shrinkage Transformer Relation Network for Intelligent Fault Detection of Industrial Robot with Zero-Fault Samples. Knowl. Based Syst. 2023, 268, 110452. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Li, X.; Li, N. Targeted Transfer Learning through Distribution Barycenter Medium for Intelligent Fault Diagnosis of Machines with Data Decentralization. Expert Syst. Appl. 2024, 244, 122997. [Google Scholar] [CrossRef]
- Kumar, P.; Raouf, I.; Kim, H.S. Transfer Learning for Servomotor Bearing Fault Detection in the Industrial Robot. Adv. Eng. Softw. 2024, 194, 103672. [Google Scholar] [CrossRef]
- Sarajchi, M.; Sirlantzis, K. Evaluating the Interaction between Human and Paediatric Robotic Lower-Limb Exoskeleton: A Model-Based Method. Int. J. Intell. Robot. Appl. 2025, 1–15. [Google Scholar] [CrossRef]
- Hu, C.; Zhang, Z.; Li, C.; Leng, M.; Wang, Z.; Wan, X.; Chen, C. A State of the Art in Digital Twin for Intelligent Fault Diagnosis. Adv. Eng. Inform. 2025, 63, 102963. [Google Scholar] [CrossRef]
- Mihai, S.; Yaqoob, M.; Hung, D.V.; Davis, W.; Towakel, P.; Raza, M.; Karamanoglu, M.; Barn, B.; Shetve, D.; Prasad, R.V.; et al. Digital Twins: A Survey on Enabling Technologies, Challenges, Trends and Future Prospects. IEEE Commun. Surv. Tutor. 2022, 24, 2255–2291. [Google Scholar] [CrossRef]
- Mykoniatis, K.; Harris, G.A. A Digital Twin Emulator of a Modular Production System Using a Data-Driven Hybrid Modeling and Simulation Approach. J. Intell. Manuf. 2021, 32, 1899–1911. [Google Scholar] [CrossRef]
- Song, Z.; Shi, H.; Bai, X.; Li, G. Digital Twin-Assisted Fault Diagnosis System for Robot Joints with Insufficient Data. J. F. Robot. 2023, 40, 258–271. [Google Scholar] [CrossRef]
- Ademujimi, T.; Prabhu, V. Digital Twin for Training Bayesian Networks for Fault Diagnostics of Manufacturing Systems. Sensors 2022, 22, 1430. [Google Scholar] [CrossRef]
- Ye, M.; Yan, X.; Hua, X.; Jiang, D.; Xiang, L.; Chen, N. MRCFN: A Multi-Sensor Residual Convolutional Fusion Network for Intelligent Fault Diagnosis of Bearings in Noisy and Small Sample Scenarios. Expert Syst. Appl. 2025, 259, 125214. [Google Scholar] [CrossRef]
- Gong, C.; Peng, R. A Novel Hierarchical Vision Transformer and Wavelet Time–Frequency Based on Multi-Source Information Fusion for Intelligent Fault Diagnosis. Sensors 2024, 24, 1799. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zang, Z.; Zhang, X.; Song, L.; Yu, Z.; Wang, Y.; Gao, Y.; Wang, L. Fault Diagnosis of Industrial Robot Based on Multi-Source Data Fusion and Channel Attention Convolutional Neural Networks. IEEE Access 2024, 12, 82247–82260. [Google Scholar] [CrossRef]
- Li, Z.; Liu, K.; Wang, X.; Yuan, X.; Xie, H.; Wang, Y. A Signal-to-Image Fault Classification Method Based on Multi-Sensor Data for Robotic Grinding Monitoring. J. Intell. Manuf. 2023, 36, 537–550. [Google Scholar] [CrossRef]
- Xue, H.; Li, Z.; Li, Y.; Jiang, H.; Chen, P. A Fuzzy Diagnosis of Multi-Fault State Based on Information Fusion from Multiple Sensors. J. Vibroengineering 2016, 18, 2135–2148. [Google Scholar] [CrossRef]
- Kheirandish, M.; Yazdi, E.A.; Mohammadi, H.; Mohammadi, M. A Fault-Tolerant Sensor Fusion in Mobile Robots Using Multiple Model Kalman Filters. Robot Auton. Syst. 2023, 161, 104343. [Google Scholar] [CrossRef]
- Wang, Z.; Liang, H.; Chen, C.; Wang, T.; Chen, Z. Graph Fusion and Propagation for Fault Diagnosis in Industrial Robots with Limited Labeled Data. IEEE Sens. J. 2024, 1–14. [Google Scholar] [CrossRef]
- Liu, B.; Bi, X.; Gu, L.; Wei, J.; Liu, B. Application of a Bayesian Network Based on Multi-Source Information Fusion in the Fault Diagnosis of a Radar Receiver. Sensors 2022, 22, 6396. [Google Scholar] [CrossRef]
- Chen, J.; Wen, K.; Xia, J.; Huang, R.; Chen, Z.; Li, W. Knowledge Embedded Autoencoder Network for Harmonic Drive Fault Diagnosis Under Few-Shot Industrial Scenarios. IEEE Internet Things J. 2024, 11, 22915–22925. [Google Scholar] [CrossRef]
- Yin, T.; Lu, N.; Guo, G.; Lei, Y.; Wang, S.; Guan, X. Knowledge and Data Dual-Driven Transfer Network for Industrial Robot Fault Diagnosis. Mech. Syst. Signal Process. 2023, 182, 109597. [Google Scholar] [CrossRef]
- Bilal, H.; Obaidat, M.S.; Aslam, M.S.; Zhang, J.; Yin, B.; Mahmood, K. Online Fault Diagnosis of Industrial Robot Using IoRT and Hybrid Deep Learning Techniques: An Experimental Approach. IEEE Internet Things J. 2024, 11, 31422–31437. [Google Scholar] [CrossRef]
- Zhao, C.; Shen, W. Dual Adversarial Network for Cross-Domain Open Set Fault Diagnosis. Reliab. Eng. Syst. Saf. 2022, 221, 108358. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Zhang, H.; Zuo, F. KMSA-Net: A Knowledge-Mining-Based Semantic-Aware Network for Cross-Domain Industrial Process Fault Diagnosis. IEEE Trans. Ind. Inform. 2024, 20, 2738–2750. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, Z.; Zhao, B.; Shao, H. Class-Aware Adversarial Multiwavelet Convolutional Neural Network for Cross-Domain Fault Diagnosis. IEEE Trans. Ind. Inform. 2024, 20, 4492–4503. [Google Scholar] [CrossRef]
- Xu, Y.; Feng, K.; Yan, X.; Sheng, X.; Sun, B.; Liu, Z.; Yan, R. Cross-Modal Fusion Convolutional Neural Networks With Online Soft-Label Training Strategy for Mechanical Fault Diagnosis. IEEE Trans. Ind. Inform. 2024, 20, 73–84. [Google Scholar] [CrossRef]
- Lee, J.; Noh, I.; Lee, J.; Lee, S.W. Development of an Explainable Fault Diagnosis Framework Based on Sensor Data Imagification: A Case Study of the Robotic Spot-Welding Process. IEEE Trans. Ind. Inform. 2022, 18, 6895–6904. [Google Scholar] [CrossRef]
- Dev Anand, M.; Selvaraj, T.; Kumanan, S. Fault Detection and Fault Tolerance Methods for Industrial Robot Manipulators Based on Hybrid Intelligent Approach. Adv. Prod. Eng. Manag. 2012, 7, 225–236. [Google Scholar] [CrossRef]


| Form of Method | Sensors | References | Purpose of Research | Key Features of the Research |
|---|---|---|---|---|
| Expert experience | Robot data and vision sensor | [76] | Avoiding misdiagnosis and missed diagnosis of robot fault | Estimate the motion state of the robot using a Kalman filter and calculate the probability of the corresponding fault mode for the motion state; selecting appropriate knowledge from expert experience systems to diagnostic results |
| Vibration measurement sensor | [77] | Strategy and full load working environment, bearing fault diagnosis | Propose a new method of random fuzzy evidence acquisition and intuitionistic fuzzy set fusion by constructing a fuzzy expert system and matching the samples to be tested | |
| Statistic model | Vibration measurement sensor | [78] | A lot of redundant information in the vibration signal, cannot be directly used for fault diagnosis without processing | Principal component analysis, locality preserving projection and isometric feature mapping extract three-dimensional features of vibration signals and form nine-dimensional features, and train naive Bayesian model to identify fault types |
| Mechanism knowledge-driven | Motor encoder feedback | [80] | Uncertain and nonlinear effects of manipulator robot operating environment fault diagnosis and fault-tolerant control | The neural network adaptive high-order variable structure fault diagnosis observer based on machine learning improves the robustness of fault signal estimation; adaptive modern fuzzy backstepping variable structure controller to reduce the impact of faults on the robot |
| Motor encoder feedback | [81] | Fault diagnosis of uncertain and nonlinear effects of manipulator robot operating environment | Using the observer with unknown input, combined with the estimated virtual mode, the residual is generated to detect and diagnose the fault information of the robot | |
| Image sensor | [84] | Detecting and isolating potential faults in manipulator robots | Kalman filter estimates the system state and calculates the residual between the actual image feature output and the Kalman filter estimation, and determines the fault based on the residual threshold | |
| Angle sensor and camera | [85] | Improve the safety and robustness of the manipulator when using only position signals | Fault diagnosis and fault-tolerant control methods for adaptive extended Kalman filter and sliding mode, detecting faults and fault-tolerant control of manipulator | |
| Signal Processing | Vibration sensor (accelerometers) | [95] | Different faults occur simultaneously; compound fault decoupling detection is difficult | The empirical wavelet transform uses an adaptive wavelet basis to extract the intrinsic mode of the signal and decomposes the compound fault into single fault with different empirical modes. Each fault is merged into a continuous oscillator, and the fault type is identified by observing the irregular motion generated by the output of the established isolator. |
| vibration sensor (accelerometers) | [96] | The faults of bearings are located in different resonance bands and the mutual interference and noise influence between different fault components | The original composite fault signal is decomposed and preprocessed by the variational mode decomposition method, which is decomposed into multiple variational eigenmode function components, and the eigenmode function components are calculated by fast spectral kurtosis | |
| ICP acceleration sensor | [97] | Vibration signal has nonlinear, non-stationary, multi-component coupling characteristics, and traditional methods cannot effectively extract the characteristics of the vibration signal | Compound interpolation CIE LMD method: nonstationary coefficient is defined to represent the local nonstationarity of vibration signal, monotone piecewise cubic Hermite interpolation is used for the nonstationary part, and cubic spline rubbing is used for the smooth part |
| Form of Method | Sensors | References | Purpose of Research | Key Features of the Research |
| Artificial intelligence | Motor encoder feedback | [11] | Current methods pay little attention to the correlation and internal differences of test data | Two parallel convolutional neural networks with different attention mechanisms are established to obtain different fault-related features |
| vibration measurement sensor | [106] | Low accuracy and efficiency, poor stability and real-time performance of manipulator robot multi-fault state diagnosis | The deep confidence network is combined with wavelet energy entropy; wavelet transform is used to denoise, decompose, and reconstruct the vibration signal, and the normalized eigenvector of reconstructed energy entropy is used as the input of deep confidence network | |
| Robot controller | [8] | Difficulty in fault diagnosis under dynamic working state | Domain generalization-residual life prediction against long short-term memory, principal component analysis squared prediction error, and p-chart to reduce abnormal interference | |
| Digital twins | Acceleration sensor, Temperature sensor | [114] | The actual joint fault data of the robot is insufficient, which is difficult to obtain in real-time | Based on the digital twin model of CycleGAN, the virtual model is mapped to the physical entity using a small amount of measured data, and the joint state data is obtained in real time |
| Vibration measurement sensor; Temperature sensor | [115] | Lack of data and computing power makes it difficult to develop a universal high-fidelity engineering digital twin model for complex systems | Engineering digital twin system: use network physical system to form network sensor and build equipment simulation model; build discrete event simulation model factory; engineering digital twin method injects faults into the virtual system for equipment and plant level fault diagnosis | |
| Multi-information fusion | Accelerometer; Current sensor | [117] | The existing methods cannot effectively capture the time information and global characteristics of the device; Single source fault diagnosis method makes it difficult to accurately extract fault features | Intelligent fault diagnosis method based on multi-source information fusion of hierarchical visual transformer and wavelet time-frequency; the multi-source signals are converted into two-dimensional time-frequency maps and fused into a hierarchical visual transformer |
| Accelerometer, Microphone | [53] | The multi-sensor data combination can observe the phenomenon of more abundant system degradation, which is helpful for equipment analysis and decision-making | The influence of data level fusion on the accuracy of different detection tools is studied, and the best combination example of sensor and deep learning fusion algorithm is studied to achieve accurate predictive maintenance; build DCNN, LSTM, and CNN-LSTM models | |
| Motor polyphase current signal | [100] | Some systems cannot install external sensors; the bearing installed outside the motor cannot effectively measure the current | Taking the multi-phase original signal of motor current as input, the characteristics of each phase current are extracted, and the features are classified by CNN. The decision-making level information fusion technology converts CNN information into simple pattern classification problem | |
| Other method | Accelerometer | [125] | The effective value of prior knowledge and learning network is not mined in the fusion, which reduces the performance of fault diagnosis | Extracts the prior knowledge of the fault signal through envelope analysis and passband selection, fuses the prior knowledge with the convolution kernel and the designed filter, embeds and transmits the prior knowledge and cross-domain knowledge using the weight sharing depth adaptive network, and uses the maximum average deviation of multiple cores for regional adaptation |
| Vibration sensor | [126] | The method can self-maintain, diagnose and repair, and carry out reliable and robust online monitoring for robots | The method based on transitive learning makes use of the inherent relationship between the adaptability of transitive learning and different failure modes; hybrid one-dimensional MCNN based on matrix kernel and RNN is used to realize the high-precision detection of robot state; time stamp mapping to overcome time inconsistency of multi-sensor | |
| Machine monitoring process signal | [128] | Difficulty in obtaining fault samples under changing operating conditions and ineffective application or performance degradation in actual industry; Not utilizing the internal and relevant knowledge under different working conditions | A non-sharing mechanism is designed to obtain the discriminant characteristics of each working condition; the cross-correlation knowledge mining subnet is used to construct the fault relationship knowledge graph to explicitly constrain the local consistency between the source domain, target domain, and cross-domain; semantic knowledge transfer subnet makes output consistent and distinguishable | |
| Vibration sensors, Sound sensors | [130] | The intrinsic correlation between the distribution gap of CNN and multi-frequency mechanical signals in the learning process is not considered | Two parallel modal-specific networks and a cross-modal knowledge-sharing network are used to explore the independent and shared features of multi-modal mechanical signals; cross-modal fusion is introduced to fuse and transfer the cross-modal features to the next layer | |
| Accelerometer, Laser sensor, Current sensor, Voltage probe | [131] | Low confidence in robot fault model prediction in the industrial field | Inferring the causal relationship of faults by using the physical interpretability of generating fuzzy energy pattern image data |
| Characteristic | Traditional Methods | Modern Methods |
| Accuracy | Excellent performance in single failure mode or periodic signal, relying on manual feature design; | Excellent performance in complex signals and multiple types of fault modes, but strong data dependence |
| Stability | Simple method deployment; known working conditions perform well | Strong adaptability to complex working conditions, but requires a large amount of data support |
| Rapidity | Fast calculation speed, suitable for real-time fault diagnosis | High demand for computing resources, real-time fault diagnosis relies on high-performance hardware devices |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wu, J.; Gao, B.; Xia, L.; Lu, C.; Wang, H.; Cao, G. Fault Types and Diagnostic Methods of Manipulator Robots: A Review. Sensors 2025, 25, 1716. https://doi.org/10.3390/s25061716
Zhang Y, Wu J, Gao B, Xia L, Lu C, Wang H, Cao G. Fault Types and Diagnostic Methods of Manipulator Robots: A Review. Sensors. 2025; 25(6):1716. https://doi.org/10.3390/s25061716
Chicago/Turabian StyleZhang, Yuepeng, Jun Wu, Bo Gao, Linzhong Xia, Chen Lu, Hui Wang, and Guangzhong Cao. 2025. "Fault Types and Diagnostic Methods of Manipulator Robots: A Review" Sensors 25, no. 6: 1716. https://doi.org/10.3390/s25061716
APA StyleZhang, Y., Wu, J., Gao, B., Xia, L., Lu, C., Wang, H., & Cao, G. (2025). Fault Types and Diagnostic Methods of Manipulator Robots: A Review. Sensors, 25(6), 1716. https://doi.org/10.3390/s25061716