
UAV Onboard STAR-RIS Service Enhancement Mechanism Based on Deep Reinforcement Learning

Abstract
1. Introduction
- We propose a UAV-mounted STAR-RIS-assisted communication service enhancement mechanism aimed at improving the channel quality for both edge users and occluded users. This mechanism demonstrates its efficacy by enhancing the efficiency and reliability of the communication system through the joint optimization of the STAR-RIS phase and amplitude, as well as the UAV’s flight trajectory and hovering angle. Additionally, the complexity of the optimization problem is addressed by formulating it as the minimization of the UAV’s total service time.
- The joint optimization problem involving a STAR-RIS and UAVs in a complex, dynamic environment includes integer variables and non-convex constraints, making it a mixed-integer nonlinear programming problem that is challenging to solve using traditional methods. To address this complexity, this paper decouples the original optimization problem into two subproblems, total flight time optimization and total transmission time optimization, thereby obtaining a suboptimal solution.
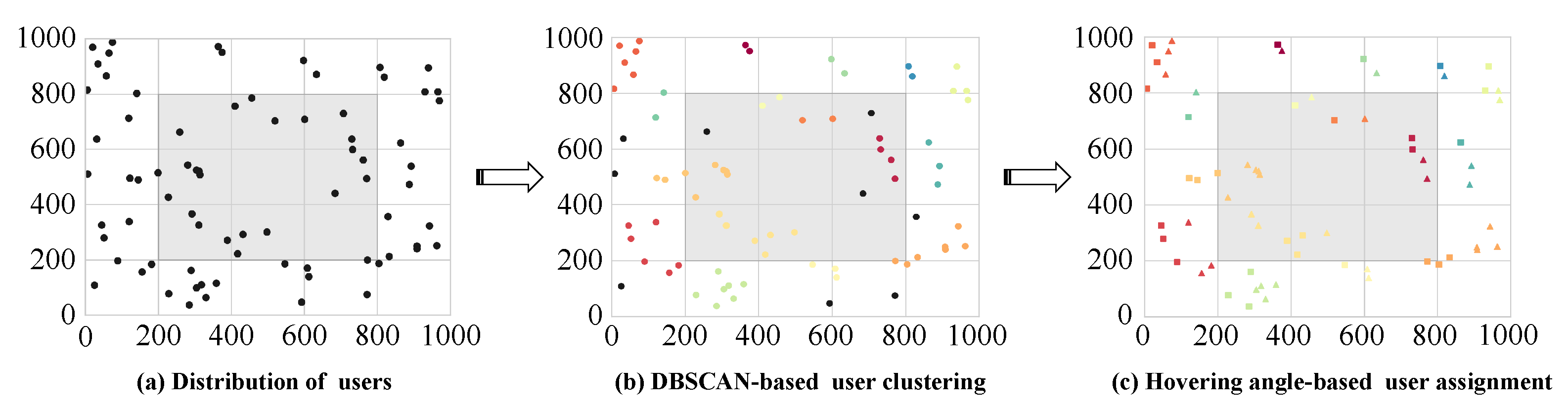
- The total flight time optimization problem employs the Chained Lin–Kernighan (CLK) algorithm to determine a trajectory that minimizes the flight time, following the delineation of the UAV’s service area using the DBSCAN algorithm. For the total transmission time optimization problem, the phase, amplitude, and UAV hovering angle of the STAR-RIS are optimized using the TD3 algorithm to minimize the transmission time.
2. Related Work
2.1. UAV-Based Communication Networks
2.2. RIS-Assisted UAV Networks
2.3. STAR-RIS-Assisted Wireless Networks
3. System Model and Problem Formulation
3.1. Mobile Model
3.2. Service User Model
3.3. Communication Model
3.4. Time Model
3.5. Problem Formulation
4. Proposed Optimization Algorithm
4.1. UAV Time of Flight Optimization Algorithm
4.1.1. DBSCAN-Based Service Area Classification
4.1.2. CLK-Based UAV Path Optimization
| Algorithm 1 UAV time of flight optimization algorithm |
|
4.2. Time of Transmission Optimization Algorithm
- State Space: The set of the agent’s states is denoted by S, the agent’s state in the time slot is represented by , and is composed of the current UAV’s coordinates, the STAR-RIS phase and amplitude, and the assignment decision, which is defined as
- Action Space: The set of actions of the agent is denoted by A, the agent’s action in the time slot n is indicated by , and includes the amplitude factor and phase shift factor of the STAR-RIS, as well as the hovering angle of the UAV. These can all be defined as increments of the current value, with the specific representation being , , and . The Hadamard product ⊙ and the increment are fundamental to this representation.
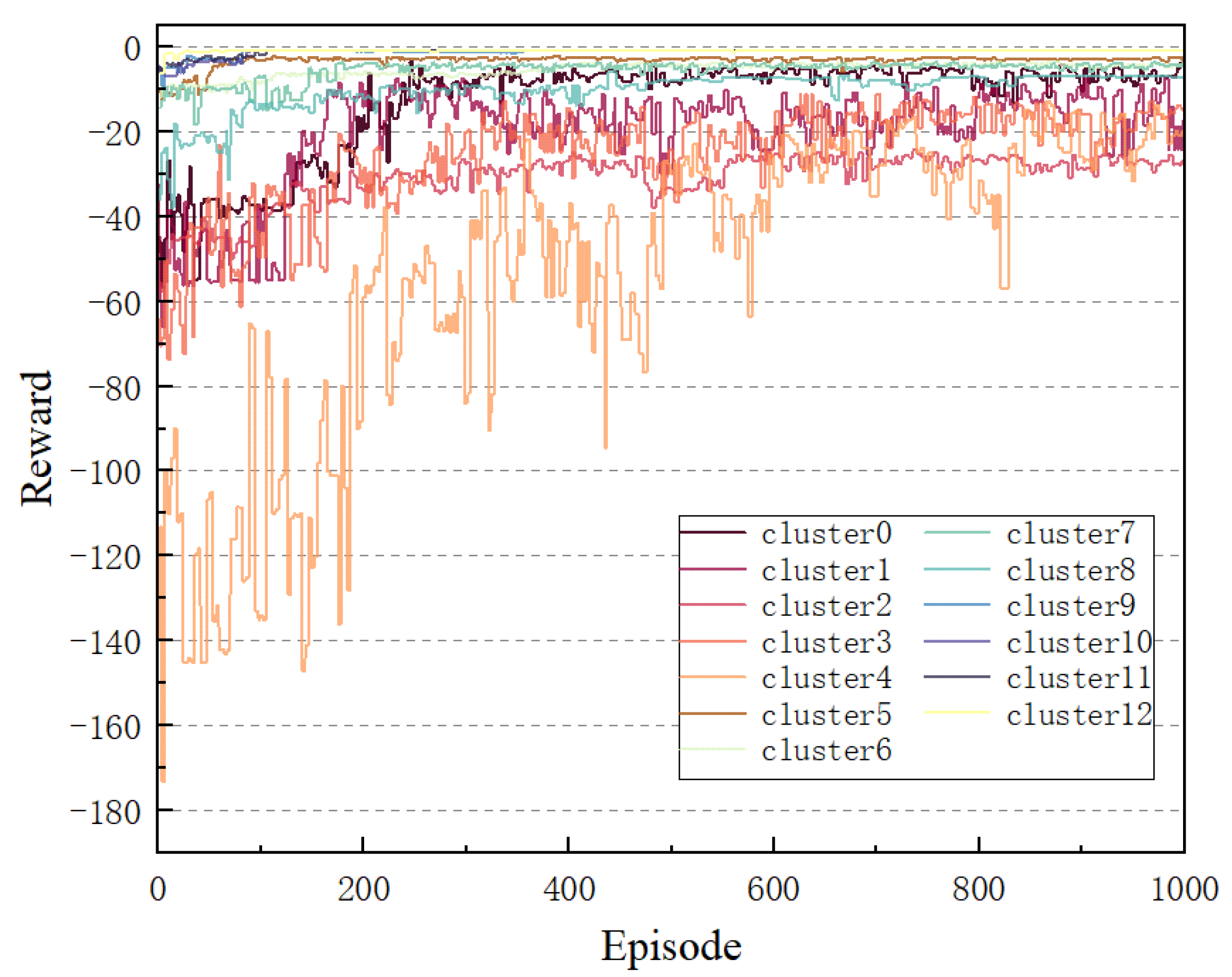
- Rewards: The objective of this study is to minimize the transmission time of users in the colony through the implementation of an optimization strategy. To this end, negative values are employed as rewards, serving as a motivational incentive for the agents to prioritize the reduction of the transmission time. It is imperative to note that the limitations concerning the maximum speed and movement range of the UAV must be taken into consideration. Consequently, the reward function can be delineated as follows:where indicates a constant that is imposed as a penalty when a constraint is violated.
| Algorithm 2TD3-based training algorithm |
|
4.3. Computational Complexity
5. Numerical Results
5.1. Simulation Setting
5.2. Simulation Results
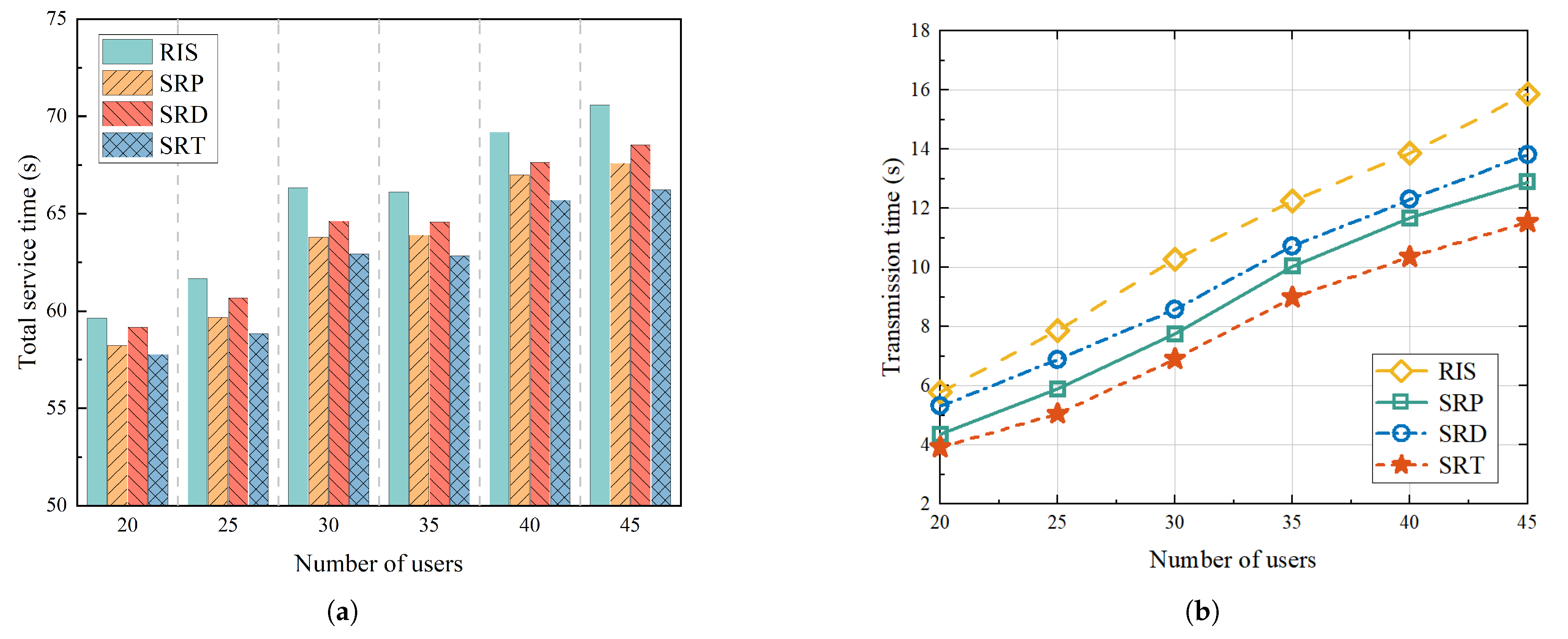
- Scheme 1: Referring to [39], we considered a service enhancement scheme with a UAV equipped with an RIS and optimized it by combining maximum likelihood estimation and maximum correlation estimation. In the figure, we use “RIS” to represent this scheme.
- Scheme 2: Referring to [31], we optimized the amplitude and phase of the STAR-RIS based on the proximal policy optimization (PPO) algorithm and did not consider the hovering angle of the UAV. In the figure, we use “SRP” to represent this scheme.
- Scheme 3: Referring to [40], we optimized the amplitude and phase of the STAR-RIS without considering the hovering angle using the DDPG algorithm. In the figure, we use “SRD” to represent this scheme.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kadir, E.A.; Shubair, R.; Abdul Rahim, S.K.; Himdi, M.; Kamarudin, M.R.; Rosa, S.L. B5G and 6G: Next Generation Wireless Communications Technologies, Demand and Challenges. In Proceedings of the 2021 International Congress of Advanced Technology and Engineering (ICOTEN), Taiz, Yemen, 4–5 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Xia, X.; Fattah, S.M.M.; Babar, M.A. A survey on UAV-enabled edge computing: Resource management perspective. Acm Comput. Surv. 2023, 56, 1–36. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Deng, Y.; Elkashlan, M.; Nallanathan, A. Joint Blocklength and Location Optimization for URLLC-Enabled UAV Relay Systems. IEEE Commun. Lett. 2019, 23, 498–501. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Ahmed, S.; Kamal, A.E. Sky’s the Limit: Navigating 6G with ASTAR-RIS for UAVs Optimal Path Planning. In Proceedings of the 2023 IEEE Symposium on Computers and Communications (ISCC), Gammarth, Tunisia, 9–12 July 2023; pp. 582–587. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2019, 34, 134–142. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable intelligent surfaces for energy efficiency in wireless communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef]
- Guo, H.; Liang, Y.C.; Chen, J.; Larsson, E.G. Weighted sum-rate maximization for reconfigurable intelligent surface aided wireless networks. IEEE Trans. Wirel. Commun. 2020, 19, 3064–3076. [Google Scholar] [CrossRef]
- Wang, C.; Chen, X.; An, J.; Xiong, Z.; Xing, C.; Zhao, N.; Niyato, D. Covert communication assisted by UAV-IRS. IEEE Trans. Commun. 2022, 71, 357–369. [Google Scholar] [CrossRef]
- Shang, B.; Shafin, R.; Liu, L. UAV swarm-enabled aerial reconfigurable intelligent surface (SARIS). IEEE Wirel. Commun. 2021, 28, 156–163. [Google Scholar] [CrossRef]
- Li, M.; Tao, X.; Li, N.; Wu, H. Energy-efficient covert communication with the aid of aerial reconfigurable intelligent surface. IEEE Commun. Lett. 2022, 26, 2101–2105. [Google Scholar] [CrossRef]
- Xu, J.; Liu, Y.; Mu, X.; Dobre, O.A. STAR-RISs: Simultaneous transmitting and reflecting reconfigurable intelligent surfaces. IEEE Commun. Lett. 2021, 25, 3134–3138. [Google Scholar] [CrossRef]
- Sun, M.; Xu, X.; Qin, X.; Zhang, P. AoI-Energy-Aware UAV-Assisted Data Collection for IoT Networks: A Deep Reinforcement Learning Method. IEEE Internet Things J. 2021, 8, 17275–17289. [Google Scholar] [CrossRef]
- Fujimoto, S.; Hoof, H.; Meger, D. Addressing function approximation error in actor-critic methods. In Proceedings of the International Conference on Machine Learning, PMLR, Stockholm Sweden, 10–15 July 2018; pp. 1587–1596. [Google Scholar] [CrossRef]
- Liu, X.; Xu, J.; Zheng, K.; Zhang, G.; Liu, J.; Shiratori, N. Throughput Maximization With an AoI Constraint in Energy Harvesting D2D-Enabled Cellular Networks: An MSRA-TD3 Approach. IEEE Trans. Wirel. Commun. 2025, 24, 1448–1466. [Google Scholar] [CrossRef]
- Hu, X.; Wong, K.K.; Yang, K.; Zheng, Z. UAV-assisted relaying and edge computing: Scheduling and trajectory optimization. IEEE Trans. Wirel. Commun. 2019, 18, 4738–4752. [Google Scholar] [CrossRef]
- Jiang, R.; Xiong, K.; Yang, H.C.; Fan, P.; Zhong, Z.; Letaief, K.B. On the coverage of UAV-assisted SWIPT networks with nonlinear EH model. IEEE Trans. Wirel. Commun. 2021, 21, 4464–4481. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Tovar, E.; Guizani, M. Joint flight cruise control and data collection in UAV-aided Internet of Things: An onboard deep reinforcement learning approach. IEEE Internet Things J. 2020, 8, 9787–9799. [Google Scholar] [CrossRef]
- Xiao, Z.; Zhu, L.; Liu, Y.; Yi, P.; Zhang, R.; Xia, X.G.; Schober, R. A survey on millimeter-wave beamforming enabled UAV communications and networking. IEEE Commun. Surv. Tutor. 2021, 24, 557–610. [Google Scholar] [CrossRef]
- Lin, N.; Liu, Y.; Zhao, L.; Wu, D.O.; Wang, Y. An adaptive UAV deployment scheme for emergency networking. IEEE Trans. Wirel. Commun. 2021, 21, 2383–2398. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.C.; Di Renzo, M. Reconfigurable intelligent surface assisted UAV communication: Joint trajectory design and passive beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef]
- Wang, S.; Song, X.; Song, T.; Yang, Y. Fairness-aware computation offloading with trajectory optimization and phase-shift design in RIS-assisted multi-UAV MEC network. IEEE Internet Things J. 2024, 11, 20547–20561. [Google Scholar] [CrossRef]
- Zhou, Y.; Ma, Z.; Liu, G.; Zhang, Z.; Yeoh, P.L.; Vucetic, B.; Li, Y. Secure multi-layer MEC systems with UAV-enabled reconfigurable intelligent surface against full-duplex eavesdropper. IEEE Trans. Commun. 2023, 72, 1565–1577. [Google Scholar] [CrossRef]
- Yao, Y.; Lv, K.; Huang, S.; Xiang, W. 3D Deployment and Energy Efficiency Optimization Based on DRL for RIS-assisted Air-to-Ground Communications Networks. IEEE Trans. Veh. Technol. 2024, 73, 14988–15003. [Google Scholar] [CrossRef]
- Duo, B.; He, M.; Wu, Q.; Zhang, Z. Joint dual-UAV trajectory and RIS design for ARIS-assisted aerial computing in IoT. IEEE Internet Things J. 2023, 10, 19584–19594. [Google Scholar] [CrossRef]
- Lin, S.; Xu, Y.; Wang, H.; Ding, G. Multi-Antenna Covert Communication Assisted by UAV-RIS With Imperfect CSI. IEEE Trans. Wirel. Commun. 2024, 23, 13841–13855. [Google Scholar] [CrossRef]
- Wu, C.; Mu, X.; Liu, Y.; Gu, X.; Wang, X. Resource Allocation in STAR-RIS-Aided Networks: OMA and NOMA. IEEE Trans. Wirel. Commun. 2022, 21, 7653–7667. [Google Scholar] [CrossRef]
- Aung, P.S.; Nguyen, L.X.; Tun, Y.K.; Han, Z.; Hong, C.S. Deep reinforcement learning based joint spectrum allocation and configuration design for STAR-RIS-assisted V2X communications. IEEE Internet Things J. 2023, 11, 11298–11311. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Wang, S.; Zhang, H. Performance optimization of physical layer security in STAR-RIS aided NOMA system. J. Commun. 2024, 45, 214–225. [Google Scholar] [CrossRef]
- Lei, J.; Zhang, T.; Mu, X.; Liu, Y. NOMA for STAR-RIS Assisted UAV Networks. IEEE Trans. Commun. 2024, 72, 1732–1745. [Google Scholar] [CrossRef]
- Aung, P.S.; Nguyen, L.X.; Tun, Y.K.; Han, Z.; Hong, C.S. Aerial STAR-RIS empowered MEC: A DRL approach for energy minimization. IEEE Wirel. Commun. Lett. 2024, 13, 1409–1413. [Google Scholar] [CrossRef]
- Khan, N.; Ahmad, A.; Alwarafy, A.; Shah, M.A.; Lakas, A.; Azeem, M.M. Efficient Resource Allocation and UAV Deployment in STAR-RIS and UAV-Relay Assisted Public Safety Networks for Video Transmission. IEEE Open J. Commun. Soc. 2025, 1, 1–17. [Google Scholar] [CrossRef]
- Li, L.; Guan, W.; Zhao, C.; Su, Y.; Huo, J. Trajectory Planning, Phase Shift Design, and IoT Devices Association in Flying-RIS-Assisted Mobile Edge Computing. IEEE Internet Things J. 2024, 11, 147–157. [Google Scholar] [CrossRef]
- Wang, D.; Hu, P.; Du, J.; Zhou, P.; Deng, T.; Hu, M. Routing and scheduling for hybrid truck-drone collaborative parcel delivery with independent and truck-carried drones. IEEE Internet Things J. 2019, 6, 10483–10495. [Google Scholar] [CrossRef]
- Yuan, B.; He, R.; Ai, B.; Chen, R.; Zhang, H.; Liu, B. Service Time Optimization for UAV Aerial Base Station Deployment. IEEE Internet Things J. 2024, 11, 38000–38011. [Google Scholar] [CrossRef]
- Applegate, D.; Cook, W.; Rohe, A. Chained Lin-Kernighan for large traveling salesman problems. Informs J. Comput. 2003, 15, 82–92. [Google Scholar] [CrossRef]
- Hsu, Y.H.; Gau, R.H. Reinforcement learning-based collision avoidance and optimal trajectory planning in UAV communication networks. IEEE Trans. Mob. Comput. 2020, 21, 306–320. [Google Scholar] [CrossRef]
- Zheng, C.; Pan, K.; Dong, J.; Chen, L.; Guo, Q.; Wu, S.; Luo, H.; Zhang, X. Multi-Agent Collaborative Optimization of UAV Trajectory and Latency-Aware DAG Task Offloading in UAV-Assisted MEC. IEEE Access 2024, 12, 42521–42534. [Google Scholar] [CrossRef]
- Varshney, N.; De, S. AoA-based low complexity beamforming for aerial RIS assisted communications at mmWaves. IEEE Commun. Lett. 2023, 27, 1545–1549. [Google Scholar] [CrossRef]
- Guo, Y.; Fang, F.; Cai, D.; Ding, Z. Energy-efficient design for a NOMA assisted STAR-RIS network with deep reinforcement learning. IEEE Trans. Veh. Technol. 2022, 72, 5424–5428. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∞ | 0 | ∞ | ∞ | ∞ | |
| ∞ | ∞ | ||||
| 0 | ∞ | ||||
| ∞ | ∞ | ∞ | |||
| ∞ | ∞ | ∞ |
| Parameter | Value |
|---|---|
| UAV altitude, | 40 m |
| Time slot length, | 0.5 s |
| Number of STAR-RIS units, M | 40 |
| Carrier wavelength, | 750 MHz |
| Element separation gap, | |
| AWGN power, | −174 dBm/Hz |
| Path loss at 1 m, | −30 dBm |
| The path loss exponent, | 2.2 |
| Bandwidth, | 10 MHz |
| Rician factor, | 10 dB |
| User transmission power, | 0.1 W |
| Replay buffer size, | 20,000 |
| Batch size, J | 256 |
| Learning rate, | 0.002 |
| Soft update factor, | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Xu, Y.; Yuan, H.; Xue, C. UAV Onboard STAR-RIS Service Enhancement Mechanism Based on Deep Reinforcement Learning. Sensors 2025, 25, 1943. https://doi.org/10.3390/s25061943
Yan J, Xu Y, Yuan H, Xue C. UAV Onboard STAR-RIS Service Enhancement Mechanism Based on Deep Reinforcement Learning. Sensors. 2025; 25(6):1943. https://doi.org/10.3390/s25061943
Chicago/Turabian StyleYan, Junjie, Yichen Xu, Haohao Yuan, and Chunhua Xue. 2025. "UAV Onboard STAR-RIS Service Enhancement Mechanism Based on Deep Reinforcement Learning" Sensors 25, no. 6: 1943. https://doi.org/10.3390/s25061943
APA StyleYan, J., Xu, Y., Yuan, H., & Xue, C. (2025). UAV Onboard STAR-RIS Service Enhancement Mechanism Based on Deep Reinforcement Learning. Sensors, 25(6), 1943. https://doi.org/10.3390/s25061943