
A Uniform Funnel Array for DOA Estimation in FANET Using Fibonacci Sampling

Abstract
1. Introduction
- 1.
- We design a simple UFA to improve the DOA estimation accuracy of correlative interferometer for signals coming from large polar angles.
- 2.
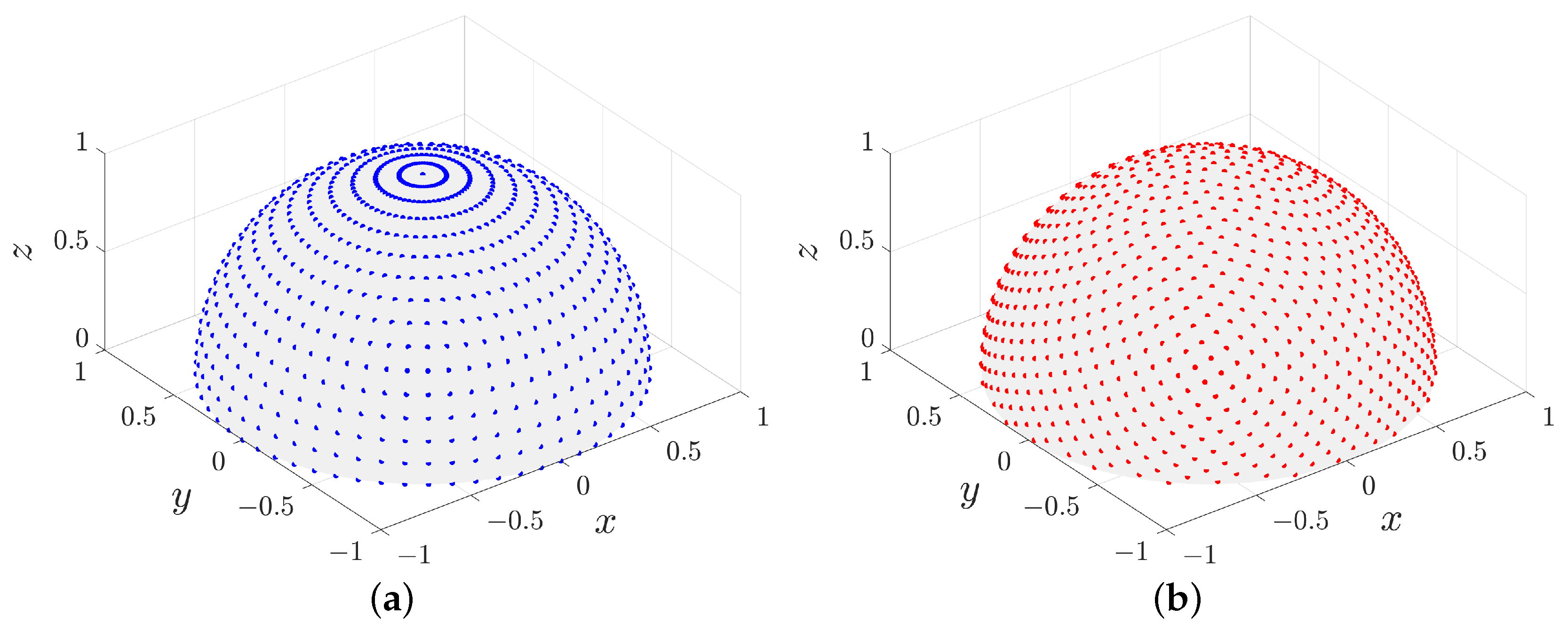
- We propose a candidate angle grid generation method based on Fibonacci sampling, which overcomes the polar clustering phenomenon exhibited by the latitude–longitude sampling.
- 3.
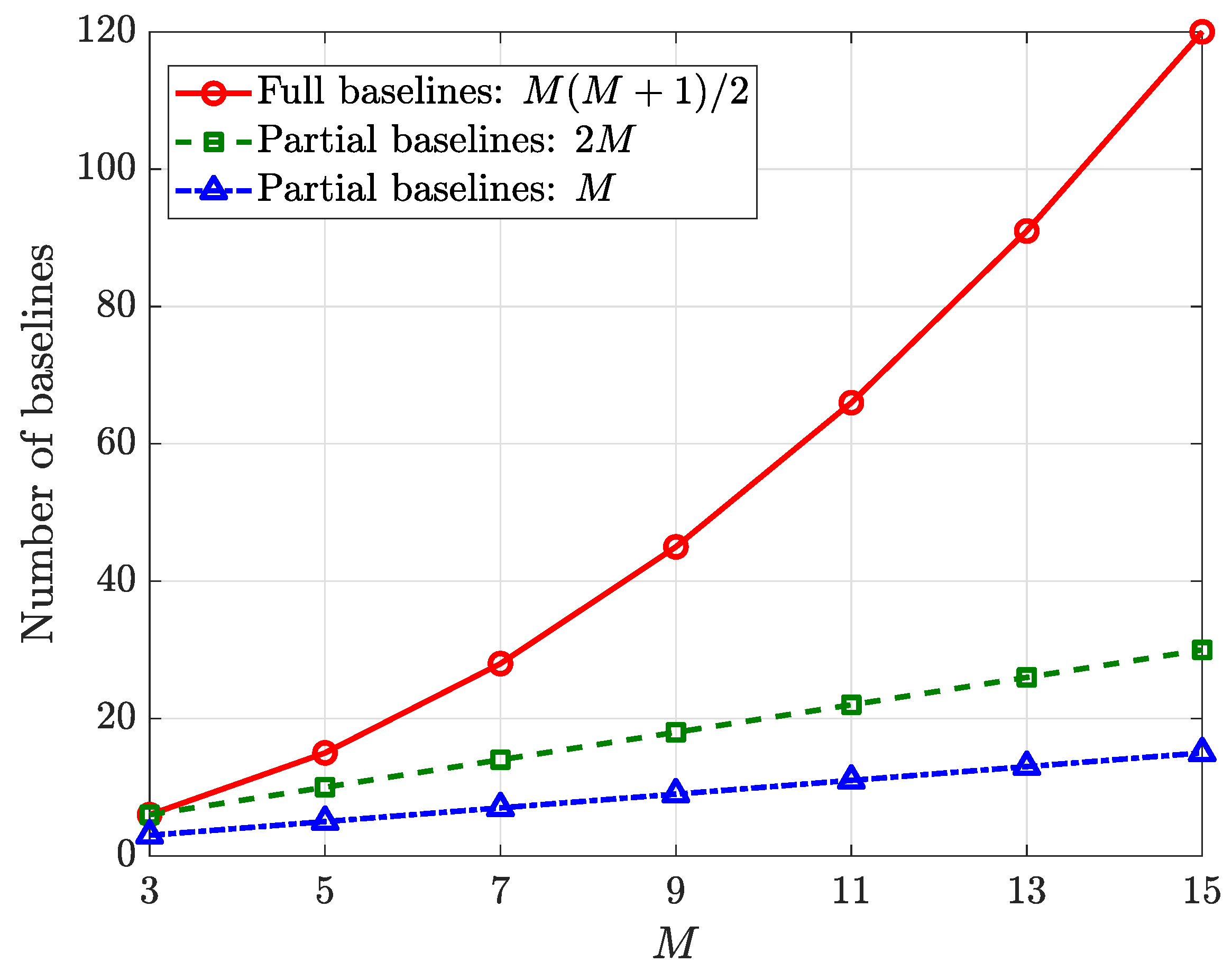
- We employ the partial baselines method to construct the phase difference dictionary, which saves storage space and improves computational efficiency.
- 4.
- We use the triangular function rather than the cosine function to calculate the similarity function, which reduces the computational cost.
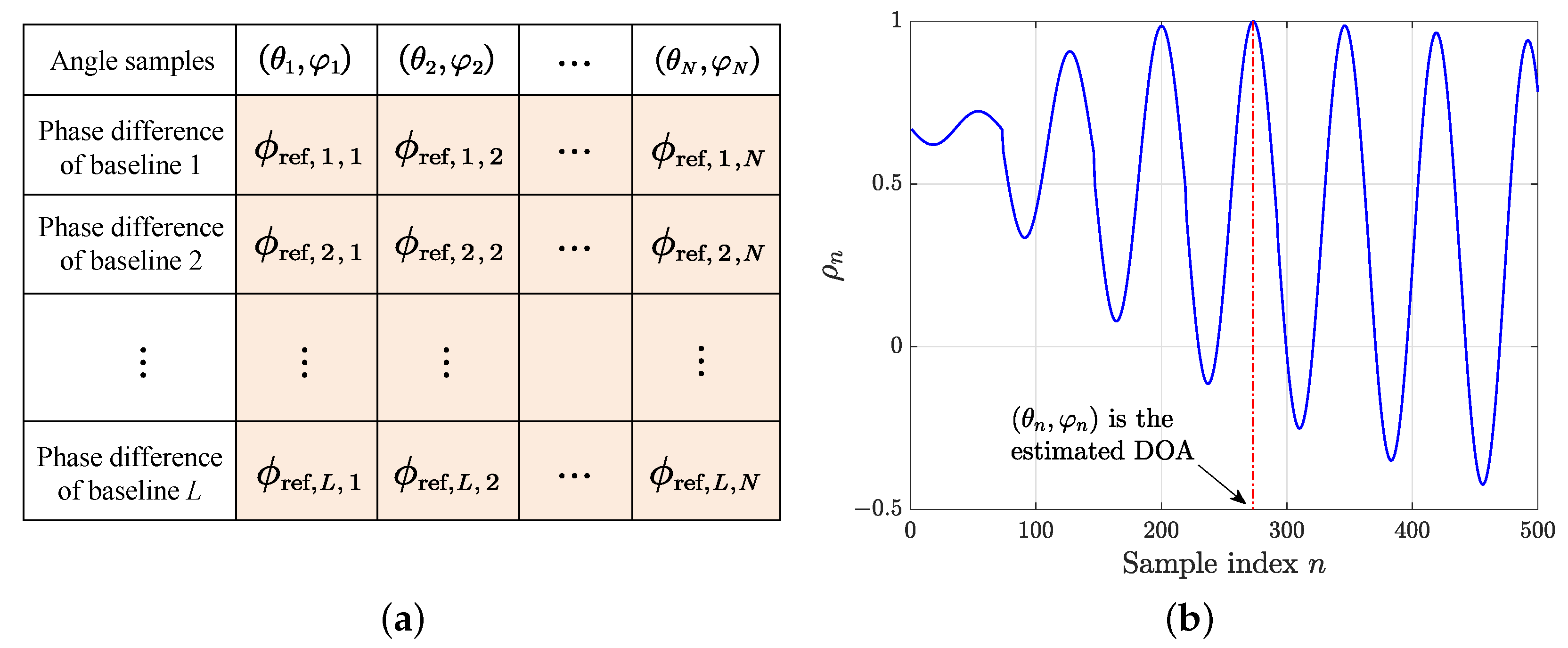
2. Principle of Correlative Interferometer
- 1.
- Array structure;
- 2.
- methods for constructing phase difference dictionary;
- 3.
- baseline selection.
3. The Proposed Method: Correlative Interferometer Using Fibonacci Sampling (CIFS)
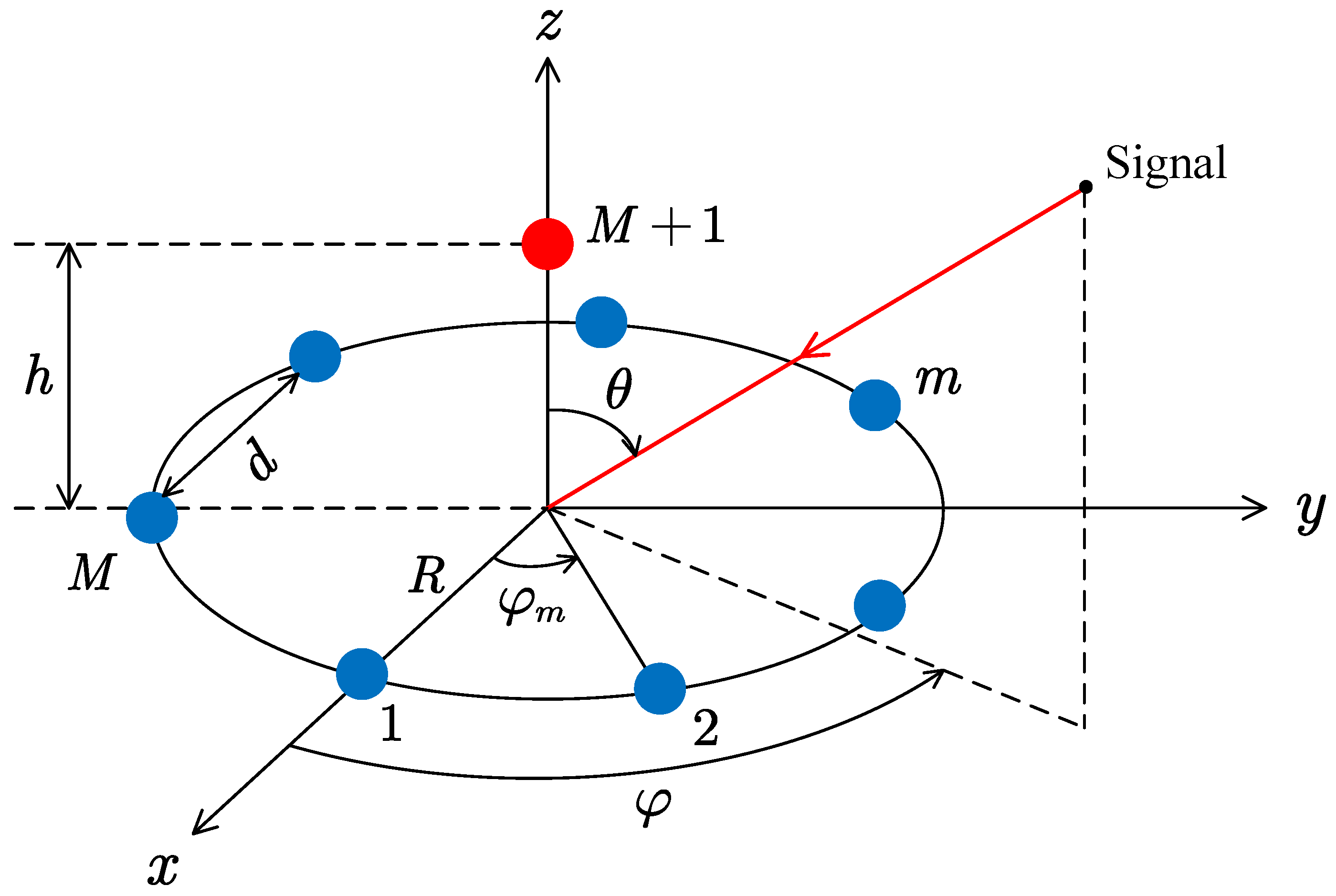
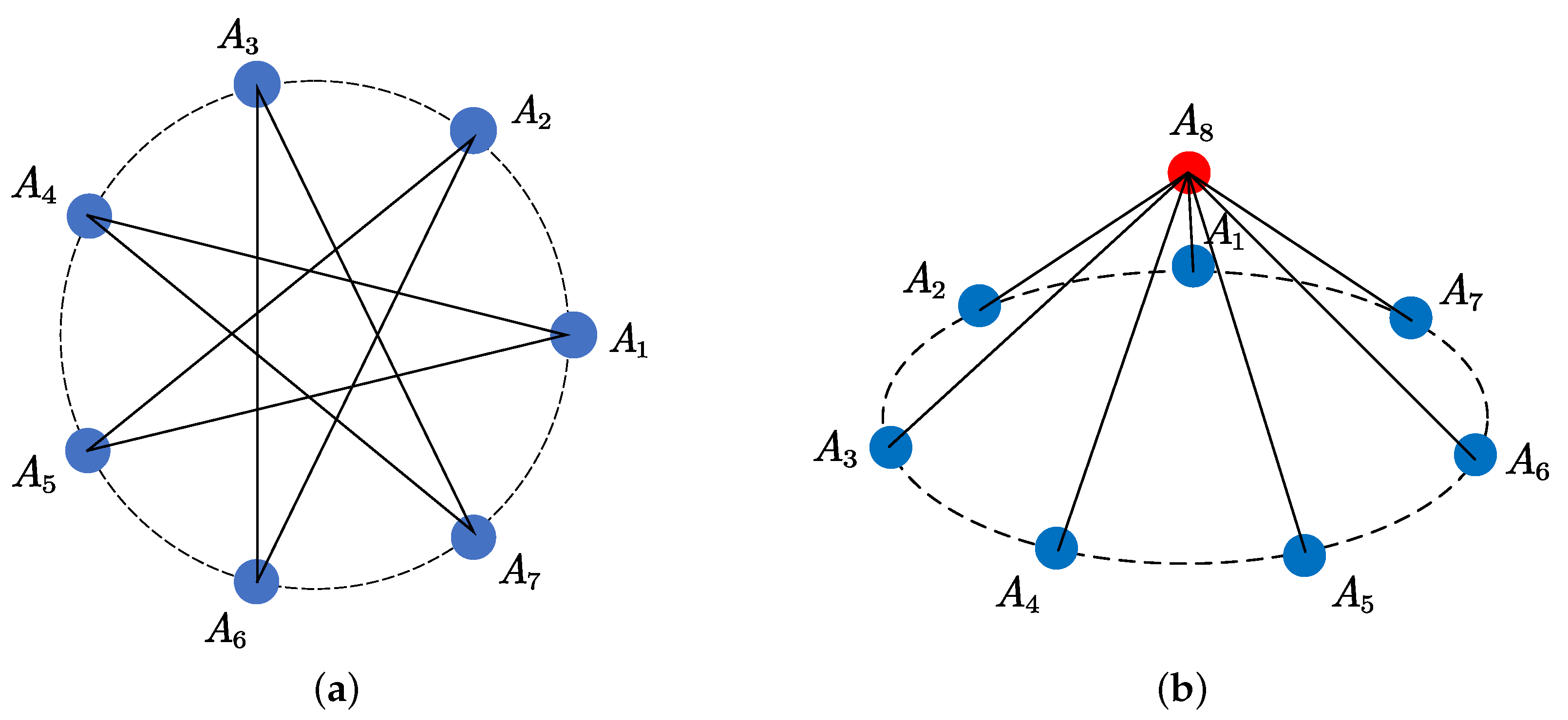
3.1. Array Configuration
3.2. Fibonacci Sampling
- 1.
- Only one sampling point exists on each latitude line.
- 2.
- The longitudinal spin between two sequential points along the generated spiral is the golden angle , i.e.,
3.3. Baseline Selection
4. Numerical Experiments and Results Analysis
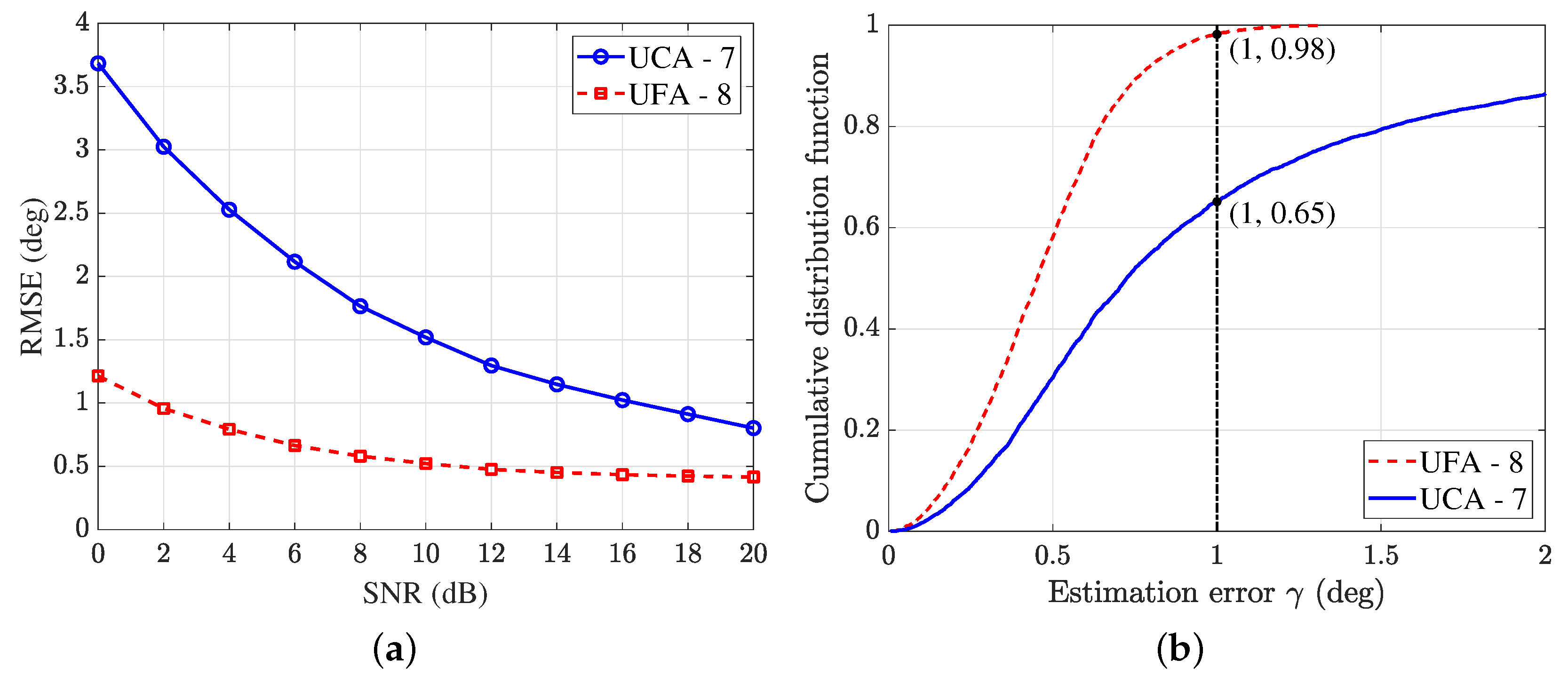
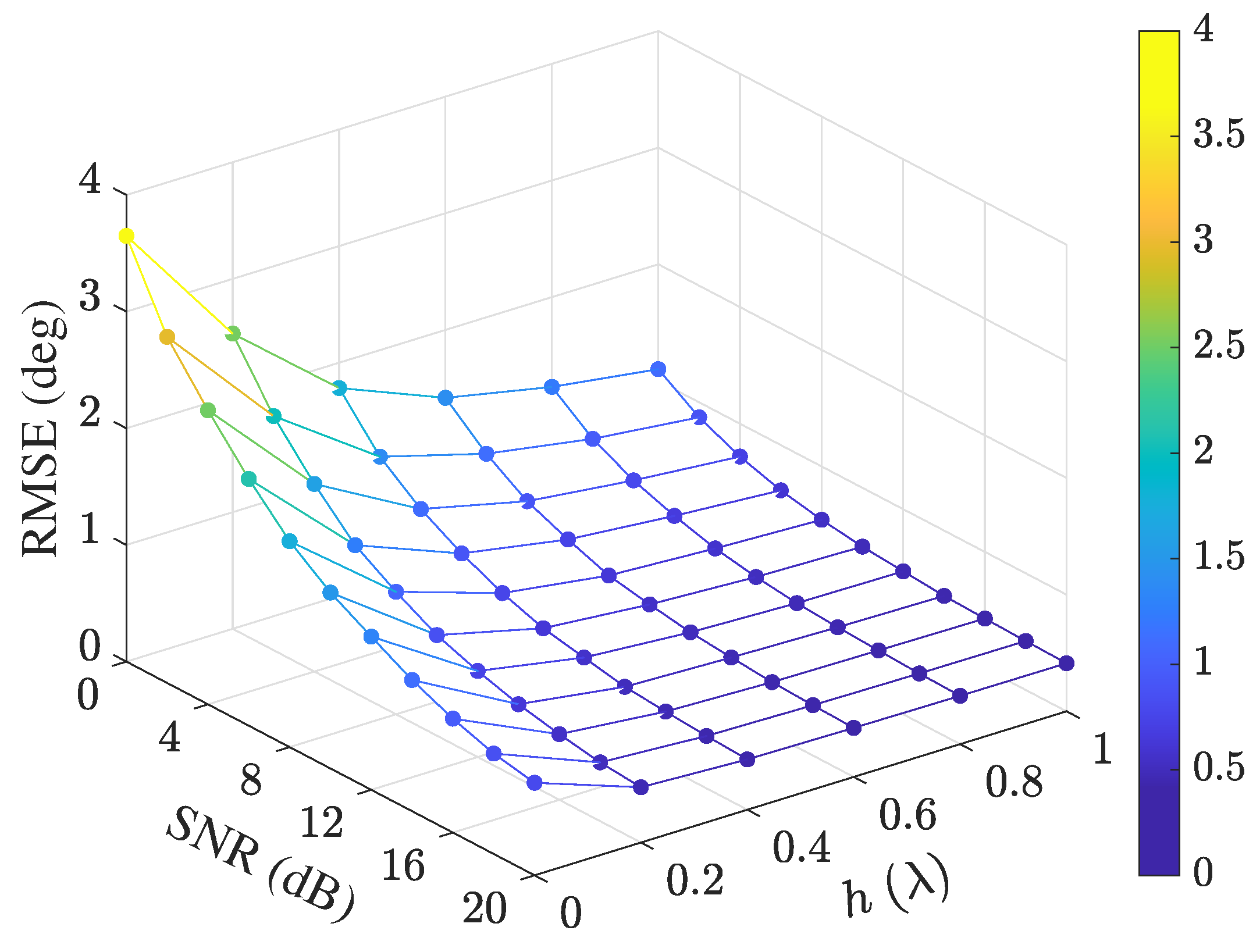
4.1. Experiment 1: Array Structure
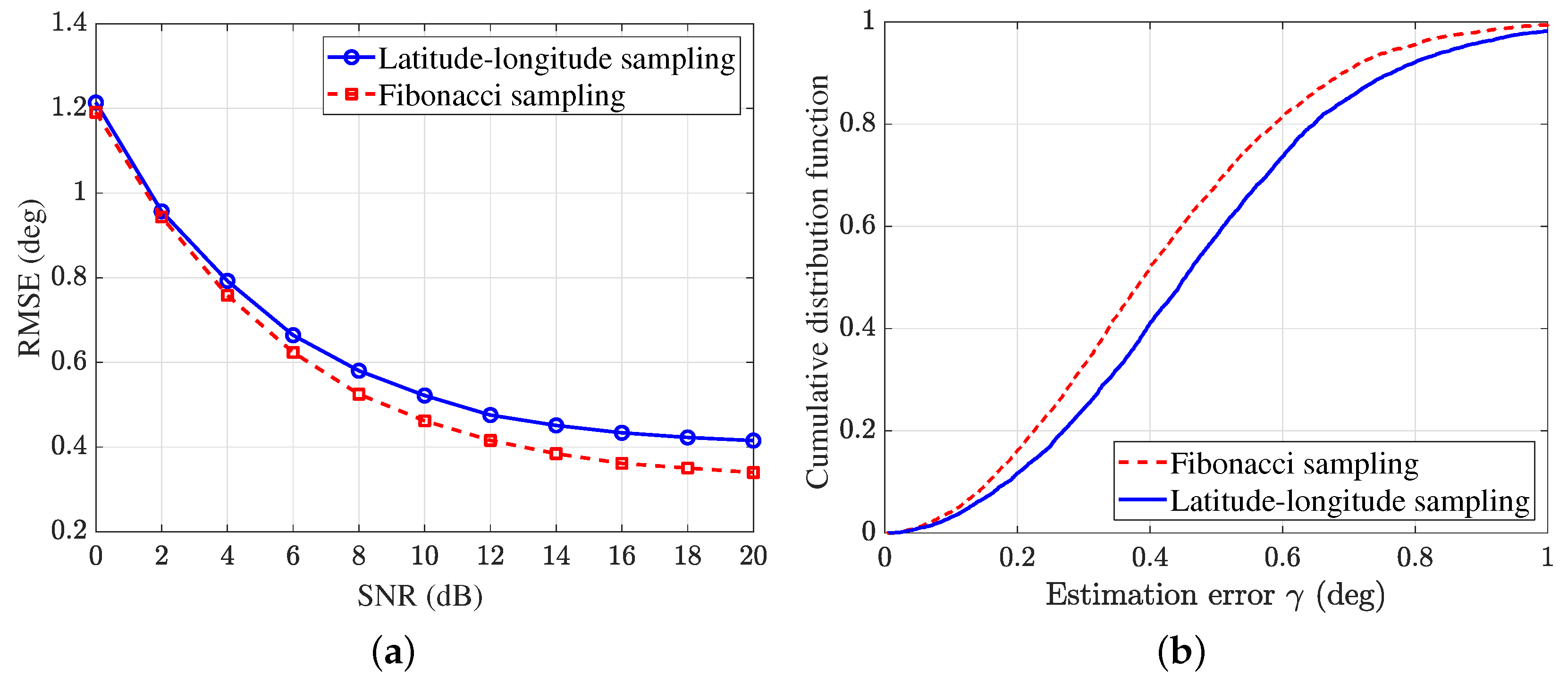
4.2. Experiment 2: Fibonacci Sampling Method
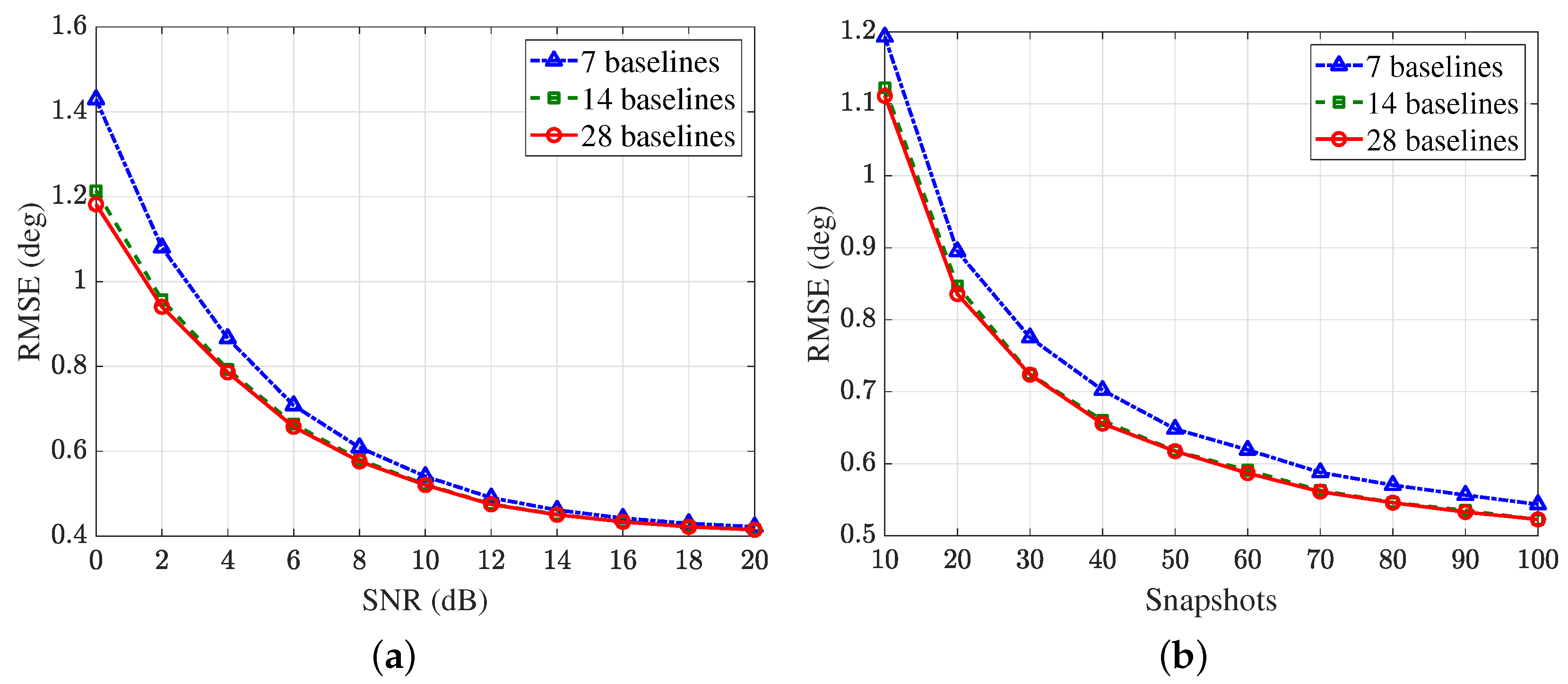
4.3. Experiment 3: Baseline Selection
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Kandregula, V.R.; Zaharis, Z.D.; Ahmed, Q.Z.; Khan, F.A.; Loh, T.H.; Schreiber, J.; Serres, A.J.R.; Lazaridis, P.I. A Review of Unmanned Aerial Vehicle Based Antenna and Propagation Measurements. Sensors 2024, 24, 7395. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, R.; Mishra, D.; Ng, D.W.K. A Comprehensive Review of Energy-Efficient Techniques for UAV-Assisted Industrial Wireless Networks. Energies 2024, 17, 4737. [Google Scholar] [CrossRef]
- Zhang, L.; Cao, X.; Su, M.; Sui, Y. Collaborative Integrated Navigation for Unmanned Aerial Vehicle Swarms Under Multiple Uncertainties. Sensors 2025, 25, 617. [Google Scholar] [CrossRef]
- Geraci, G.; Garcia-Rodriguez, A.; Azari, M.M.; Lozano, A.; Mezzavilla, M.; Chatzinotas, S.; Chen, Y.; Di Renzo, M. What Will the Future of UAV Cellular Communications Be? A Flight From 5G to 6G. IEEE Commun. Surv. Tutor. 2022, 24, 1304–1335. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying adhoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Wang, D.; Lian, B.; Liu, Y.; Gao, B. A cooperative uav swarm localization algorithm based onprobabilistic data association for visual measurement. IEEE Sens. J. 2022, 22, 19635–19644. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, C. (Eds.). Understanding GPS/GNSS: Principles and Applications, 3rd ed.; Artech House: London, UK, 2017. [Google Scholar]
- Hou, J.; Wang, C.; Zhao, Z.; Zhou, F.; Zhou, H. A New Method for Joint Sparse DOA Estimation. Sensors 2024, 24, 7216. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, W.; Hong, X.; Zhou, J. A Fourth-Order Cumulant-Based Multi-Sources DOA Estimation in UAV Collaborative Systems. IEEE Signal Process. Lett. 2024, 24, 251–255. [Google Scholar] [CrossRef]
- Takahashi, R.; Inaba, T.; Takahashi, T.; Tasaki, H. Digital Monopulse Beamforming for Achieving the CRLB for Angle Accuracy. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 315–323. [Google Scholar] [CrossRef]
- Kayhan, A.S.; Amin, M.G. Spatial evolutionary spectrum for DOA estimation and blind signal separation. IEEE Trans. Signal Process. 2000, 48, 791–798. [Google Scholar] [CrossRef] [PubMed]
- Shi, R. Principle, Method and Application for Direction Finding by Interferometer; Publishing House of Electronics Industry: Beijing, China, 2023. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Drake, S.P.; McKerral, J.C.; Anderson, B.D.O. Single Channel Multiple Signal Classification Using Pseudo-Doppler. IEEE Signal Process. Lett. 2023, 30, 1587–1591. [Google Scholar] [CrossRef]
- Roy, R.; Paulraj, A.; Kailath, T. ESPRIT–A subspace rotation approach to estimation of parameters of cisoids in noise. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 1340–1342. [Google Scholar] [CrossRef]
- Li, W.; Zhu, Z.; Gao, W.; Liao, W. Stability and super-resolution of MUSIC and ESPRIT for multi-snapshot spectral estimation. IEEE Trans. Signal Process. 2022, 70, 4555–4570. [Google Scholar] [CrossRef]
- Moghaddasi, J.; Djerafi, T.; Wu, K. Multiport Interferometer-Enabled 2-D Angle of Arrival (AOA) Estimation System. IEEE Trans. Microw. Theory Tech. 2017, 65, 1767–1779. [Google Scholar] [CrossRef]
- Bazzi, A.; Slock, D.T.M.; Meilhac, L. Online angle of arrival estimation in the presence of mutual coupling. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; pp. 1–4. [Google Scholar]
- Bazzi, A.; Slock, D.T.M.; Meilhac, L. Performance analysis of an AoA estimator in the presence of more mutual coupling parameters. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 3356–3360. [Google Scholar]
- Liao, B.; Zhang, Z.G.; Chan, S.C. DOA Estimation and Tracking of ULAs with Mutual Coupling. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 891–905. [Google Scholar] [CrossRef]
- Horng, W.Y. An Efficient DOA Algorithm for Phase Interferometers. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1819–1828. [Google Scholar] [CrossRef]
- Nanzer, J.A. Sensitivity of a Passive Correlation Interferometer to an Angularly Moving Source. IEEE Trans. Microw. Theory Tech. 2012, 60, 3868–3876. [Google Scholar] [CrossRef]
- Jacobs, E.; Ralston, E.W. Ambiguity Resolution in Interferometry. IEEE Trans. Aerosp. Electron. Syst. 1981, 17, 766–780. [Google Scholar] [CrossRef]
- Oh, M.; Lee, Y.S.; Lee, I.K.; Jung, B.C. Simultaneous Correlative Interferometer Technique for Direction Finding of Signal Sources. Sensors 2023, 23, 8938. [Google Scholar] [CrossRef] [PubMed]
- Liao, B.; Wu, Y.T.; Chan, S.C. A Generalized Algorithm for Fast Two-Dimensional Angle Estimation of a Single Source with Uniform Circular Arrays. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 984–986. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, Y.; Zhou, H.; Zhang, A. Fast Low-Sidelobe Pattern Synthesis Using the Symmetry of Array Geometry. Sensors 2024, 24, 4059. [Google Scholar] [CrossRef] [PubMed]
- Wei, H.W.; Shi, Y.G. Performance analysis and comparison of correlative interferometers for direction finding. In Proceedings of the IEEE 10th International conference on signal processing (ICSP), Beijing, China, 24–28 October 2010; pp. 393–396. [Google Scholar]
- Memarian, Z.; Majidi, M. Multiple Signals Direction Finding of IoT Devices Through Improved Correlative Interferometer Using Directional Elements. In Proceedings of the 2022 Sixth International Conference on Smart Cities, Internet of Things and Applications (SCIoT), Mashhad, Iran, 14–15 September 2022; pp. 1–6. [Google Scholar]
- Duncan, J.W. The Effect of Ground Reflections and Scattering on an Interferometer Direction Finder. IEEE Trans. Aerosp. Electron. Syst. 1967, 3, 922–932. [Google Scholar] [CrossRef]
- Hannay, J.H.; Nye, J.F. Fibonacci numerical integration on a sphere. J. Phys. A Math. Gen. 2004, 37, 11591. [Google Scholar] [CrossRef]
- Marques, R.; Bouville, C.; Bouatouch, K.; Blat, J. Extensible Spherical Fibonacci Grids. IEEE Trans. Vis. Comput. Graph. 2021, 27, 2341–2354. [Google Scholar] [CrossRef]
- Xiaobo, A.; Zhenghe, F.; Li, T. A single channel correlative interferometer direction finder using VXI receiver. In Proceedings of the 2002 3rd International Conference on Microwave and Millimeter Wave Technology (ICMMT), Beijing, China, 17–19 August 2002; pp. 1158–1161. [Google Scholar]
- Van Trees, H.L. Optimum Array Processing; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- González, Á. Measurement of areas on a sphere using Fibonacci and latitude–longitude lattices. Math. Geosci. 2010, 42, 49–64. [Google Scholar] [CrossRef]
- Hannan, M.A.; Crisafulli, O.; Giammello, G.; Sorbello, G. On the Error Metrics Used for Direction of Arrival Estimation. Sensors 2025, 25, 2358. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Frequency (MHz) | Number of Sample Points | Measurement Time (s) | UAV Speed (km/h) | Distance Traveled by UAV (mm) |
|---|---|---|---|---|
| 100 | 100∼1000 | 1∼10 | 200∼300 | ≤0.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, S.; Zhang, M.; Liu, Y.; Zhu, S. A Uniform Funnel Array for DOA Estimation in FANET Using Fibonacci Sampling. Sensors 2025, 25, 2651. https://doi.org/10.3390/s25092651
Huo S, Zhang M, Liu Y, Zhu S. A Uniform Funnel Array for DOA Estimation in FANET Using Fibonacci Sampling. Sensors. 2025; 25(9):2651. https://doi.org/10.3390/s25092651
Chicago/Turabian StyleHuo, Siwei, Ming Zhang, Yongxi Liu, and Shitao Zhu. 2025. "A Uniform Funnel Array for DOA Estimation in FANET Using Fibonacci Sampling" Sensors 25, no. 9: 2651. https://doi.org/10.3390/s25092651
APA StyleHuo, S., Zhang, M., Liu, Y., & Zhu, S. (2025). A Uniform Funnel Array for DOA Estimation in FANET Using Fibonacci Sampling. Sensors, 25(9), 2651. https://doi.org/10.3390/s25092651