
Study and Realization of Dual-Mode Mobile Light Detection and Ranging Measurement System

Abstract
:1. Introduction
2. Materials and Methods
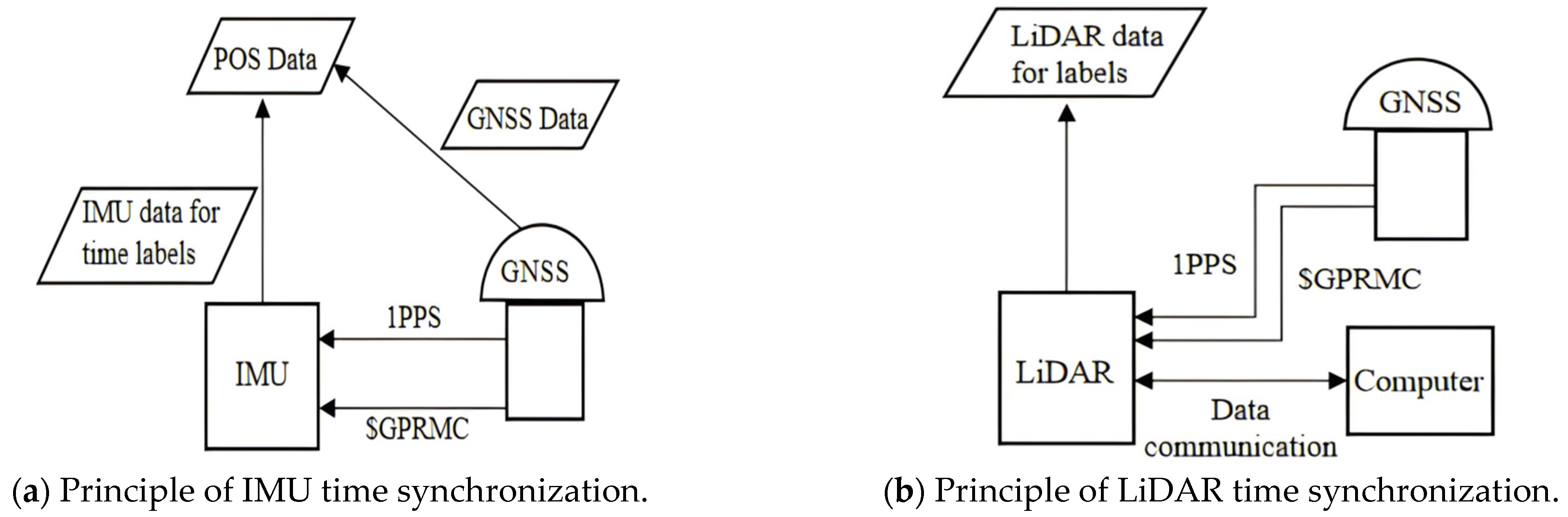
2.1. Design Principle of Dual-Mode Time-Synchronous Mobile Measurement System
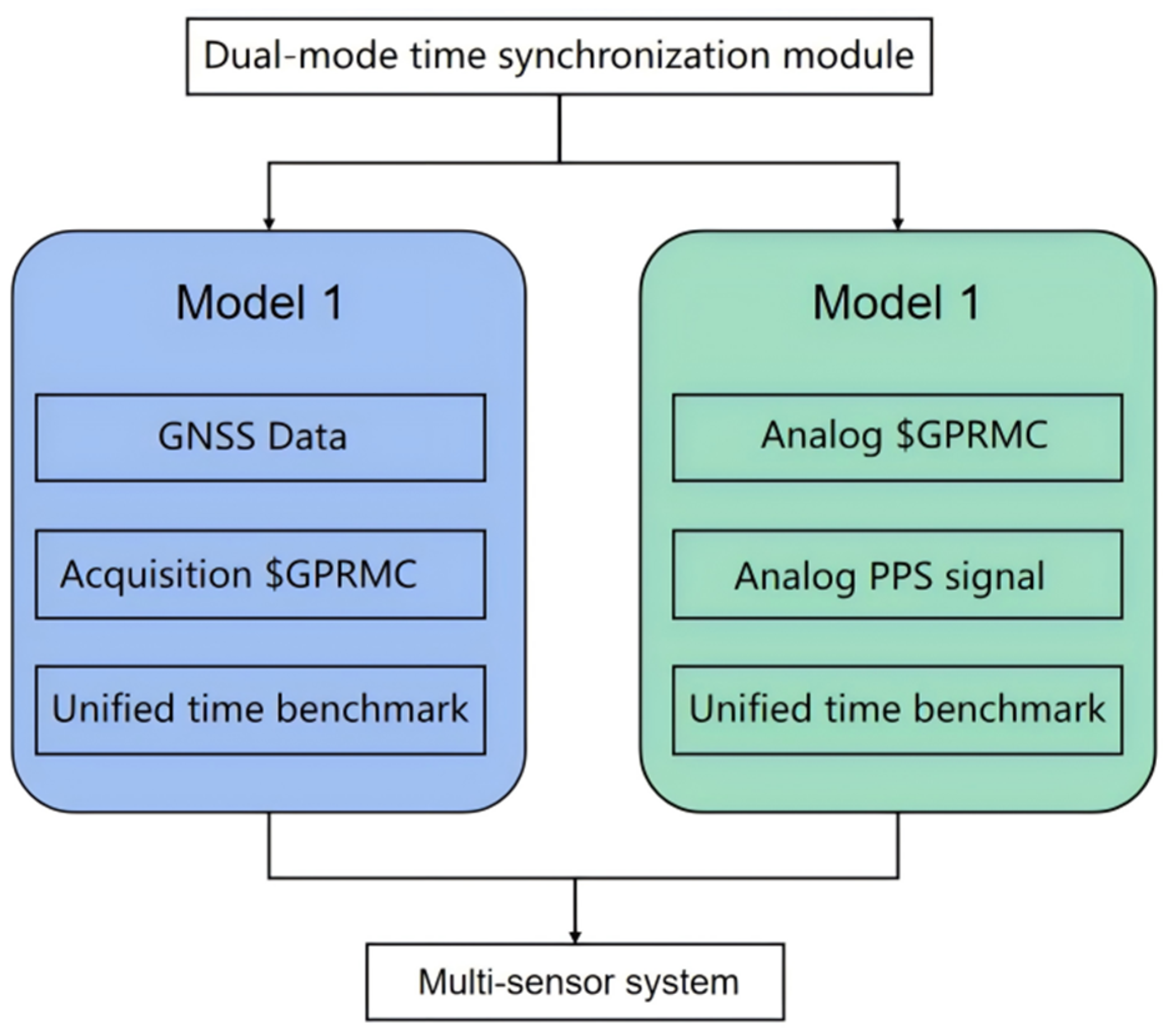
2.2. Dual-Mode Time Synchronization Communication Module Design
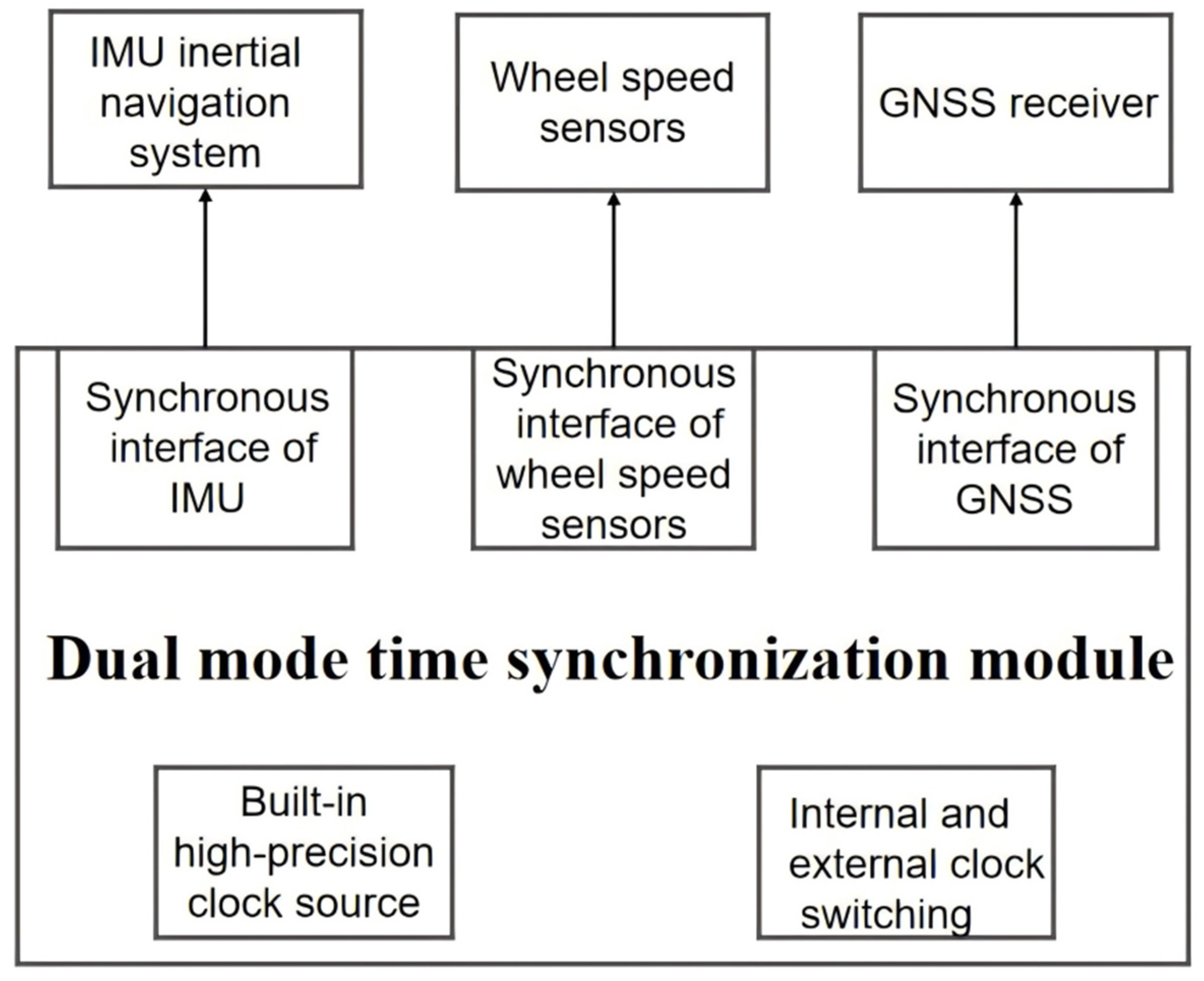
2.3. Automatic Switching of Dual-Mode Time Synchronization Modules
3. Experiments
3.1. Time Synchronization Control Module
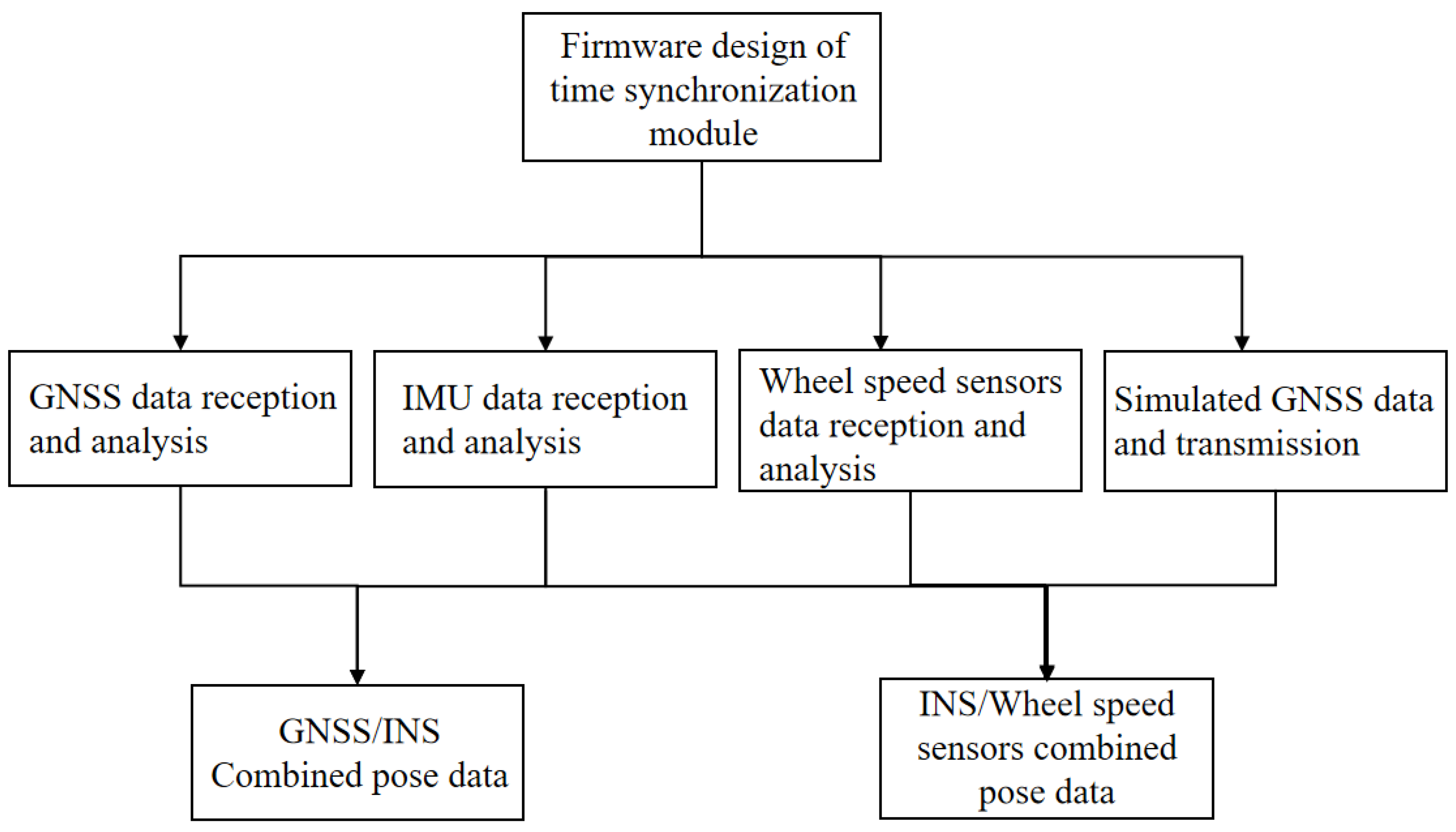
3.2. Design of Time Synchronization Control Module Firmware Program
3.2.1. Multi-Measurement Sensor Data Reception and Analysis
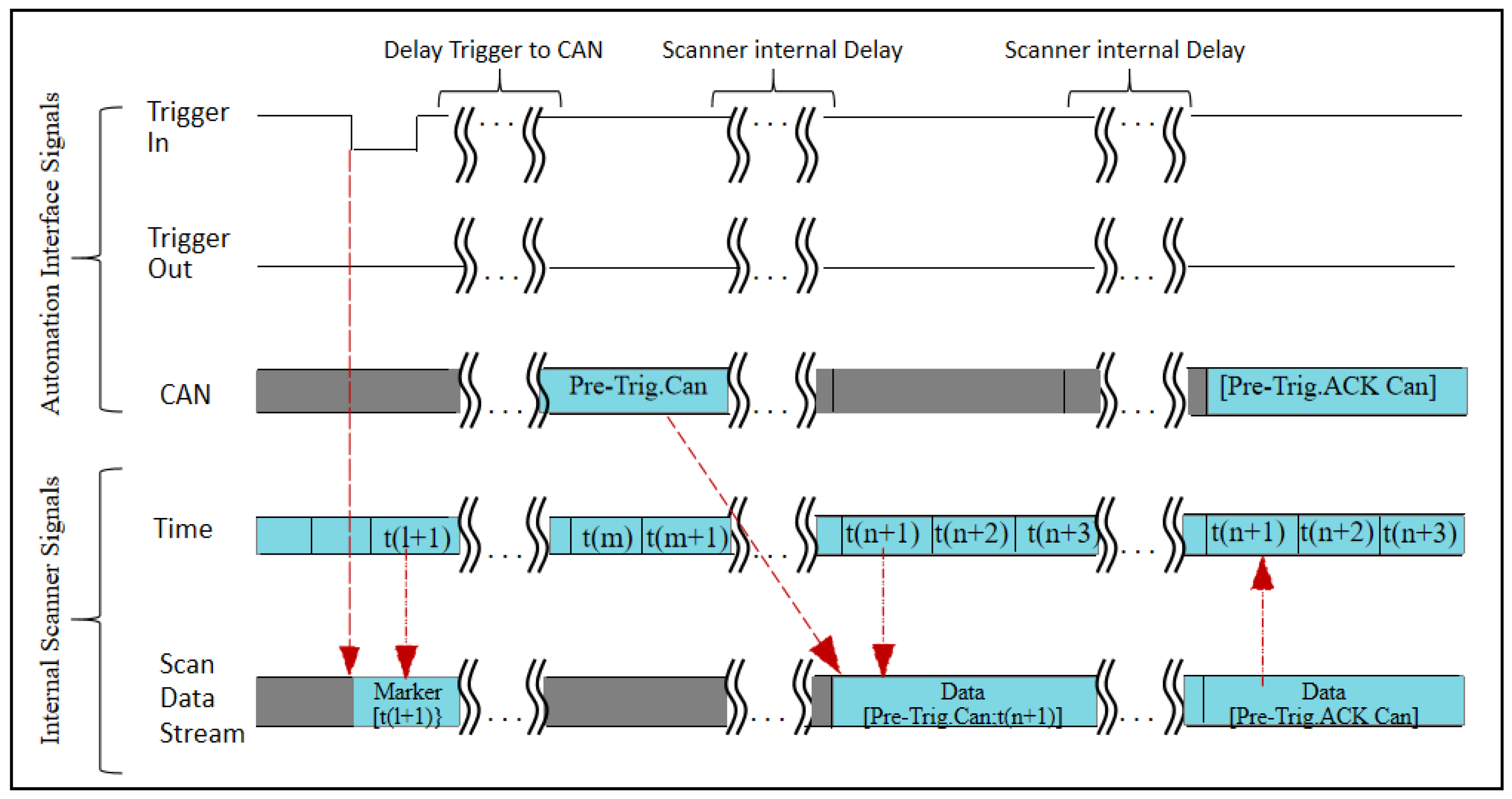
3.2.2. Simulation Time and PPS Generation
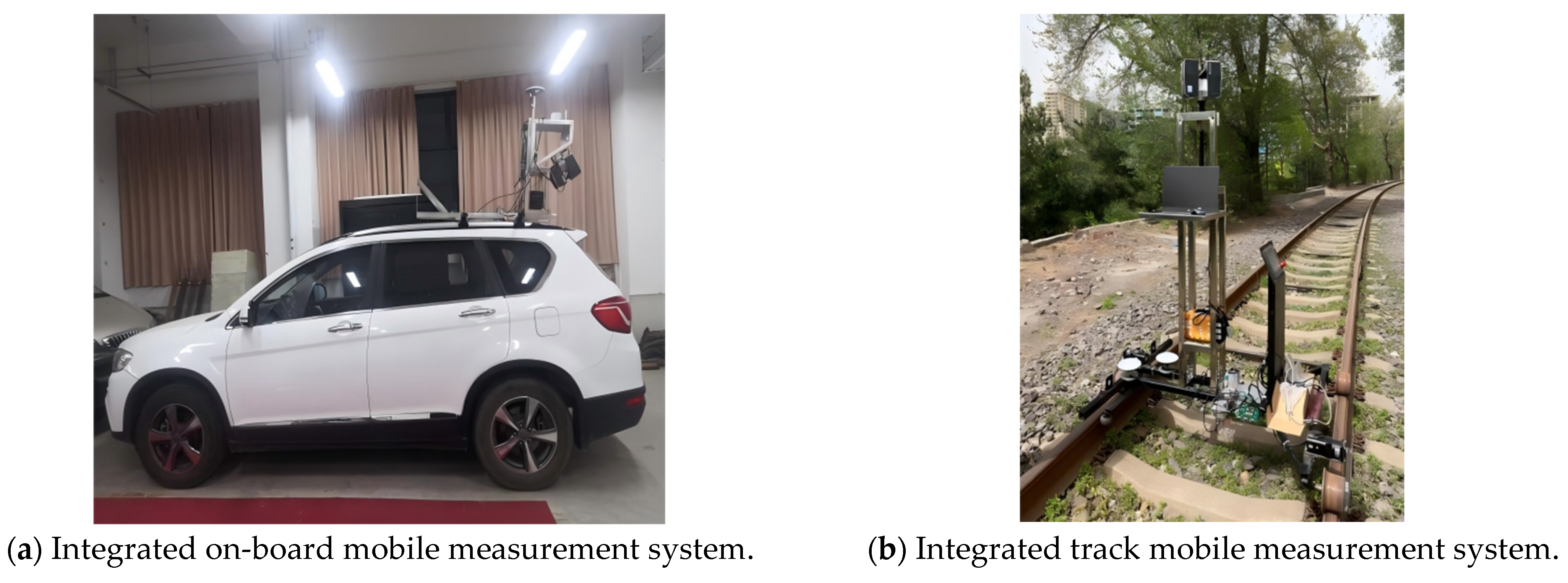
3.3. Dual-Mode Mobile LiDAR Measurement System Integration Effect
4. Results
4.1. Vehicle-Based Measurement System Trajectory Data Pre-Processing
4.2. Overall System Accuracy Test
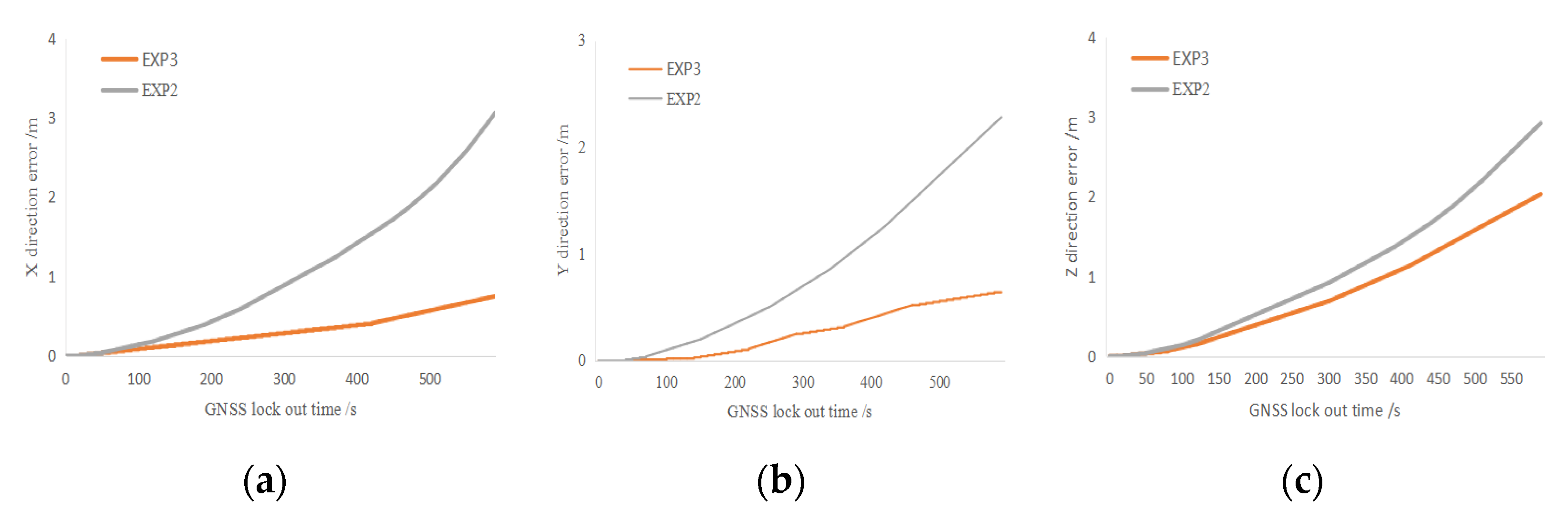
4.3. Effect of Dual-Mode Mobile Measurement System on Posture Error
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Al-Durgham, K.; Lichti, D.D.; Kwak, E.; Dixon, R. Automated accuracy assessment of a mobile mapping system with lightweight laser scanning and MEMS sensors. Appl. Sci. 2021, 11, 1007. [Google Scholar] [CrossRef]
- Yu, J.; Lu, X.; Tian, M.; Chan, T.O.; Chen, C. Automatic extrinsic self-calibration of mobile LiDAR systems based on planar and spherical features. Meas. Sci. Technol. 2021, 32, 065107. [Google Scholar] [CrossRef]
- Gézero, L.; Antunes, C. Road rutting measurement using mobile LiDAR systems point cloud. ISPRS Int. J. Geo-Inf. 2019, 8, 404. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, G.J.; Li, Y.H.; Li, Y.; El-Sheimy, N. Navigation engine design for automated driving using INS/GNSS/3D LiDAR-SLAM and integrity assessment. Remote Sens. 2020, 12, 1564. [Google Scholar] [CrossRef]
- Ando, T.; Kugimiya, W.; Hashimoto, T.; Momiyama, F.; Aoki, K.; Nakano, K. Lateral control in precision docking using RTK-GNSS/INS and LiDAR for localization. IEEE Trans. Intell. Veh. 2020, 6, 78–87. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, G.J.; Chang, H.W.; Joly, C.; Ei-Sheimy, N. Seamless navigation and mapping using an INS/GNSS/grid-based SLAM semi-tightly coupled integration scheme. Inf. Fusion 2019, 50, 181–196. [Google Scholar] [CrossRef]
- Anand, B.; Senapati, M.; Barsaiyan, V.; Rajalakshmi, P. LiDAR-INS/GNSS-based real-time ground removal, segmentation, and georeferencing framework for smart transportation. IEEE Trans. Instrum. Meas. 2021, 70, 8504611. [Google Scholar] [CrossRef]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A comprehensive review of GNSS/INS integration techniques for land and air vehicle applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 2. [Google Scholar] [CrossRef]
- Abdelaziz, N.; El-Rabbany, A. INS/LIDAR/Stereo SLAM Integration for Precision Navigation in GNSS-Denied Environments. Sensors 2023, 23, 7424. [Google Scholar] [CrossRef] [PubMed]
- Abdelaziz, N.; El-Rabbany, A. An integrated ins/lidar slam navigation system for gnss-challenging environments. Sensors 2022, 22, 4327. [Google Scholar] [CrossRef] [PubMed]
- Guo, M.; Sun, M.; Zhou, T.; Yan, B.; Zhou, Y.; Pan, D. Novel Trajectory Optimization Algorithm of Vehicle-borne LiDAR Mobile Measurement System. Sens. Mater. 2020, 32, 3935–3953. [Google Scholar] [CrossRef]
- Guo, M.; Zhou, Y.; Zhao, J.; Zhou, T.; Yan, B.; Huang, X. Urban Geospatial Information Acquisition Mobile Mapping System based on close-range photogrammetry and IGS site calibration. Geo-Spat. Inf. Sci. 2021, 24, 558–579. [Google Scholar] [CrossRef]
- Osman, M.; Mehrez, M.W.; Daoud, M.A.; Hussein, A.; Jeon, S.; Melek, W. A generic multi-sensor fusion scheme for localization of autonomous platforms using moving horizon estimation. Trans. Inst. Meas. Control. 2021, 43, 3413–3427. [Google Scholar] [CrossRef]
- Shamseldin, T.; Manerikar, A.; Elbahnasawy, M.; Habib, A. SLAM-based Pseudo-GNSS/INS localization system for indoor LiDAR mobile mapping systems. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 197–208. [Google Scholar]
- Thepsit, T.; Konghuayrob, P.; Saenthon, A.; Yanyong, S. Localization for Outdoor Mobile Robot Using LiDAR and RTK-GNSS/INS. Sens. Mater. 2024, 36, 1405–1418. [Google Scholar] [CrossRef]
- Zhu, J.; Zhou, H.; Wang, Z.; Yang, S. Improved Multi-sensor Fusion Positioning System Based on GNSS/LiDAR/Vision/IMU with Semi-tightly Coupling and Graph Optimization in GNSS Challenging Environments. IEEE Access 2023, 11, 95711–95723. [Google Scholar] [CrossRef]
- Zhang, K.; Zou, D.; Wang, P.; Jing, W. A new device for two-way time-frequency real-time synchronization. J. Internet Technol. 2023, 24, 817–824. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Indicators | Technical Parameters |
|---|---|
| Antenna type | OEM7720 dual antenna |
| Position accuracy | Single point L1: 1.5 m |
| Single point L1/L2: 1.2 m | |
| SBAS: 0.6 m | |
| DGPS: 0.4 m | |
| RTK: 0.01 m + 1 ppm | |
| Frequency of data updates | Maximum 100 HZ |
| Time accuracy | 20 ns RMS |
| Velocimetry accuracy | <0.03 m/s |
| Speed limit | 515 m/s |
| Temperature | −40–85 °C |
| Humidity | Non-condensing |
| Communication interface | 3 LVCMOS |
| 2 CAN | |
| 1 USB |
| X (m) | Y (m) | Z (m) | |
|---|---|---|---|
| Exp2 | 3 | 2.5 | 3 |
| Exp3 | 0.8 | 0.5 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Wu, X.; Guo, M.; Ren, X.; Zhou, Y.; Li, D.; Liao, L.; Li, Z. Study and Realization of Dual-Mode Mobile Light Detection and Ranging Measurement System. Sensors 2025, 25, 2679. https://doi.org/10.3390/s25092679
Chen C, Wu X, Guo M, Ren X, Zhou Y, Li D, Liao L, Li Z. Study and Realization of Dual-Mode Mobile Light Detection and Ranging Measurement System. Sensors. 2025; 25(9):2679. https://doi.org/10.3390/s25092679
Chicago/Turabian StyleChen, Cai, Xiangling Wu, Ming Guo, Xian Ren, Yuquan Zhou, Dengke Li, Liqiong Liao, and Zitian Li. 2025. "Study and Realization of Dual-Mode Mobile Light Detection and Ranging Measurement System" Sensors 25, no. 9: 2679. https://doi.org/10.3390/s25092679
APA StyleChen, C., Wu, X., Guo, M., Ren, X., Zhou, Y., Li, D., Liao, L., & Li, Z. (2025). Study and Realization of Dual-Mode Mobile Light Detection and Ranging Measurement System. Sensors, 25(9), 2679. https://doi.org/10.3390/s25092679