
Energy Efficient UAV Flight Control Method in an Environment with Obstacles and Gusts of Wind



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Vehicle stabilization—algorithms based on PID controllers that aim to stabilize the angular position of the UAV in space.
- (2)
- Stabilization and control of height, vertical speed, and vehicle flight speed—these algorithms were also based on PID controllers supported by state machines and mathematical algorithms based on energy estimation.
- (3)
- Navigation algorithms—heading control, flight along a required route, loiter, etc. These algorithms were also based on PID controllers supported by mathematical algorithms and input/output signal shaping systems.
- (a)
- Planning and adjustment of algorithms of individual flight sections, considering the occurrence of obstacles and tasks related to terrain scanning, are integrated within aerial vehicle control algorithms, which allow for rapid corrections of the designated route plans.
- (b)
- All algorithms were designed in such a way that they could be implemented on vehicles based on ARM architecture, which is the basic architecture of the contemporary UAV—the model-based design technology dedicated by DO-178C and DO-331, DO-332, DO-333 [4,5,6] was used, the MC was based on ROS and the FCC, on RTOS.
- (c)
- Hexagonal grid-based trajectory determination algorithms used are deterministic, fast, and reliable, which is relevant for the certification thereof by institutions that allow UAVs to operate in controlled airspace.
- (d)
- All algorithms shall consider the presence of non-zero speed winds.
- (e)
- Vehicle control algorithms shall take into account wind gusts in accordance with the methodologies described in NATO standards.
- (f)
- The UAV architecture has been presented, which allows for the execution of autonomous missions, where the planning algorithms described are an important component of the implementation of the mission.
- (g)
- Hardware-in-the-loop tests were performed.
2. Related Works
3. Models and Methods
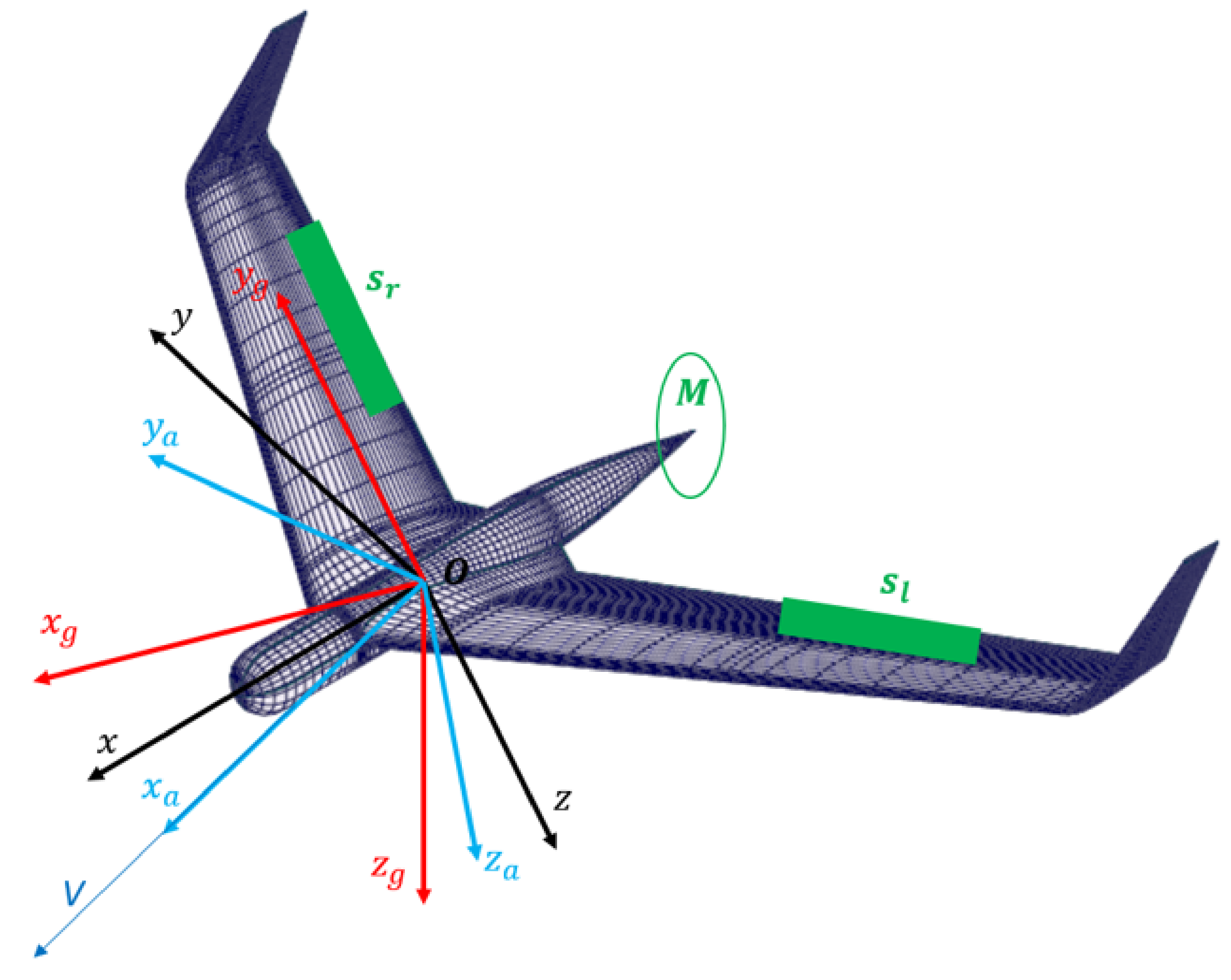
3.1. UAV Mathematical Model
- It is assumed that the object under consideration is rigid, not deformable, of constant weight, and constant inertia.
- The center of mass is fixed and does not change.
- The impact of the Earth’s curvature has been neglected and it has been assumed that the gravity field is homogeneous.
- UAV movement equations were derived from the angular and linear moment change law.
- —UAV/body frame.
- —Earth frame.
- —wind frame.
- 1.
- Thrust coefficient () in function of (J).
- 2.
- Power coefficient () in function of (J).
- 3.
- Propeller efficiency () in function of (J).
- —thrust coefficient.
- —power coefficient.
- T—thrust (N).
- —air density (kg/m3).
- —propeller rotations (rps).
- D—propeller diameter (m).
- J—propeller advance ratio.
- V—airspeed (m/s).
- —power converted into thrust by the propeller T (N) at speed V (m/s).
- M—moment on the propeller shaft.
- —propeller rotation speed (1/s).
- Diameter—0.304 m (measured).
- Pitch—0.102 m (according to manufacturer data).
- H/D—0.336.
- Standard atmosphere model [29].
- On-board sensor simulator: GPS, IMU, magnetometer, LIDAR, and battery.
- Models of selected elements of mechanical equipment.
- Throttle—value of electrical control signal in the range from 0 to 100
- Bh—angular value of the elevator.
- Ba—angular value of the ailerons.
3.2. Stabilization and Navigation Algorithms
3.3. Flight Velocity Stabilization Algorithms
- Low-level controller—subsystem intended to convert the thrust T into the electrical input of M drive, considering the battery’s charge level. Output thrust T ranges from 0 to 100% and it has to be converted to electrical signal, e.g., PWM, PPM, CAN. Moreover, some of the commercial motor controllers do not allow for setting a specific rotational speed, in which case the battery charge level should be taken into account for the output control value.
- Feed forward (FF) algorithm—based on the set flight speed and wind parameters, an initial thrust value is determined which is corrected by the PID controller. The algorithm includes set speed value, direction, and wind speed to calculate final thrust. This algorithm is implemented as a polynomial function, where input is a sum of wind coefficient and . Feed forward allows to immediately reach an approximate thrust value that will allow to fly at a desired speed.
- IAS to thrust—PID controller, which, on the basis of a deviation, designates control around the work point designated by the feed forward algorithm. In most applications, a PI controller is sufficient, where P eliminates a wind gusts, while I is supposed to regulate a fixed deviation (constant wind, inaccuracies of FF algorithm and battery charge compensation). Additionally, the I component is reset to zero each time at the moment of changing the . It is needed because the FF value is changing too.
4. Missions Planning
4.1. Determination of Actual Field Distances between Individual Vertices
- Distance between neighboring cells is the same along each of the six main directions.
- Curved structures are represented more accurately than in rectangular pixels.
- Less hexagonal pixels than square pixels are required to represent the map.
- Closed shapes are represented as closed on the map.
- Z—non-negative integer.
- a—array number 1 or 0.
- —row and column number in the relevant array.
4.2. Aerial Vehicle Mission Planning Task
- Typical constraints for grid flows.
- Constraints for the unmanned platform which carries out object reconnaissance.
- Technical constraints related to the need to eliminate cycles.
- —assuming the value of 1 when the UAV’s mission plan includes flight through a point modeled with a vertex ; 0 w p.p.
- —assuming value 1 when the UAV’s mission plan includes flight through a route segment modeled with an edge ; 0 w p.p.
- —determining the time slot during which the UAV should fly through a vertex ; 0 w p.p.
- (a)
- UAVs with index h have to take off:The initial vertex has an identifier of 0, which does not reduce the overall formulation of the task.
- (b)
- Every UAV that has taken off, has to land:
- (c)
- The area modeled with the vertex of the network has to have the same number of UAVs taking off and landing:
- (d)
- The number of UAVs that may pass through the route segment modeled with an edge is the number specified by the planner with parameter :
- In the scope of determining flight time on a segment depending on UAV velocity relative to air (so-called indicated air speed (IAS))—constraint (42).
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned aerial platform |
| FCC | Flight control computer |
| MC | Mission computer |
| GCS | Ground control system |
| ROS | Robot Operating System |
| MILP | Mixed integer linear programming |
| HIL | Hardware-in-the-loop |
| VRPTW | Vehicle route planning with time windows |
References
- Sanchez-Lopez, J.L.; Pestana, J.; de la Puente, P.; Campoy, P. A Reliable, Open-Source, System, Architecture for the Fast Designing and Prototyping of Autonomous Multi-UAV Systems: Simulation and Experimentation. J. Intell. Robot. Syst. 2016, 84, 779–797. [Google Scholar] [CrossRef] [Green Version]
- Pastor, E.; Lopez, J.; Royo, P. A Hardware/Software Architecture for UAV Payload and Mission Control. In Proceedings of the 2006 IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–19 October 2006; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Gromada, K.A.; Stecz, W.M. Designing a Reliable UAV Architecture Operating in a Real Environment. Appl. Sci. 2022, 12, 294. [Google Scholar] [CrossRef]
- RTCA. DO-331 Model-Based Development and Verification Supplement to DO-178C and DO-278A; RTCA: Washington, DC, USA, 2011. [Google Scholar]
- RTCA. DO-332 Object-Oriented Technology and Related Techniques Supplement to DO-178C and DO-278A; RTCA: Washington, DC, USA, 2011. [Google Scholar]
- RTCA. DO-333 Formal Methods Supplement to DO-178C and DO-278A; RTCA: Washington, DC, USA, 2011. [Google Scholar]
- Boubeta-Puig, J.; Moguel, E.; Sánchez-Figueroa, F.; Hernández, J.; Preciado, J.C. An Autonomous UAV Architecture for Remote Sensing and Intelligent Decision-making. IEEE Internet Comput. 2018, 22, 6–15. [Google Scholar] [CrossRef] [Green Version]
- Ilarslan, M.; Bayrakceken, M.K.; Arisoy, A. Avionics system design of a mini VTOL UAV. In Proceedings of the 29th Digital Avionics Systems Conference, Salt Lake City, Utah, USA, 3–8 October 2010; pp. 6.A.3-1–6.A.3-7. [Google Scholar] [CrossRef]
- Robot Operating System. Available online: https://www.ros.org/ (accessed on 1 March 2022).
- Stecz, W.; Kowaleczko, P. Designing Operational Safety Procedures for UAV According to NATO Architecture Framework. In ICSOFT 2021, Proceedings of the 16th International Conference on Software Technologies, Online, 6–8 July 2021; Science and Technology Publications: Setubal, Portugal, 2021; pp. 135–142. ISBN 978-989-758-523-4. ISSN 2184-2833. [Google Scholar]
- Wang, Y.; Lei, H.; Hackett, R.; Beeby, M. Safety Assessment Process Optimization for Integrated Modular Avionics. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 58–67. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, X.; Zhong, Z.; Zhang, Y. ROS-based UAV control using hand gesture recognition. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 6795–6799. [Google Scholar] [CrossRef]
- Carvalho, J.P.; Jucá, M.A.; Menezes, A.; Olivi, L.R.; Marcato, A.L.M.; dos Santos, A.B. Autonomous UAV Outdoor Flight Controlled by an Embedded System Using Odroid and ROS. In CONTROLO 2016, Proceedings of the 12th Portuguese Conference on Automatic Control, Guimaraes, Portugal, 14–16 September 2016; Lecture Notes in Electrical Engineering; Garrido, P., Soares, F., Moreira, A., Eds.; Springer: Cham, Switzerland, 2016; Volume 402. [Google Scholar] [CrossRef]
- Zhang, M.; Qin, H.; Lan, M.; Lin, J.; Wang, S.; Liu, K.; Lin, F.; Chen, B.M. A high fidelity simulator for a quadrotor UAV using ROS and Gazebo. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 2846–2851. [Google Scholar] [CrossRef]
- Siemiatkowska, B.; Stecz, W. A Framework for Planning and Execution of Drone Swarm Missions in a Hostile Environment. Sensors 2021, 21, 4150. [Google Scholar] [CrossRef] [PubMed]
- Stecz, W.; Gromada, K. UAV Mission Planning with SAR Application. Sensors 2020, 20, 1080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maw, A.A.; Tyan, M.; Lee, J.W. iADA*: Improved Anytime Path Planning and Replanning Algorithm for Autonomous Vehicle. J. Intell. Robot. Syst. 2020, 100, 1005–1013. [Google Scholar] [CrossRef]
- Duszak, P.; Siemiątkowska, B.; Więckowski, R. Hexagonal Grid-Based Framework for Mobile Robot Navigation. Remote Sens. 2021, 13, 4216. [Google Scholar] [CrossRef]
- Wen, N.; Su, X.; Ma, P.; Zhao, L.; Zhang, Y. Online UAV path planning in uncertain and hostile environments. Int. J. Mach. Learn. Cybern. 2017, 8, 469–487. [Google Scholar] [CrossRef]
- Haider, S.K.; Jiang, A.; Almogren, A.; Rehman, A.U.; Ahmed, A.; Khan, W.U.; Hamam, H. Energy Efficient UAV Flight Path Model for Cluster Head Selection in Next-Generation Wireless Sensor Networks. Sensors 2021, 21, 8445. [Google Scholar] [CrossRef] [PubMed]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained Control of UAVs in Geofencing Applications. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 217–222. [Google Scholar] [CrossRef]
- Fu, Z.; Yu, J.; Xie, G.; Chen, Y.; Mao, Y. A Heuristic Evolutionary Algorithm of UAV Path Planning. Wirel. Commun. Mob. Comput. 2018, 2018, 2851964. [Google Scholar] [CrossRef] [Green Version]
- Lau, H.C.; Sim, M.; Teo, K.M. Vehicle routing problem with time windows and a limited number of vehicles. Eur. J. Oper. Res. 2003, 148, 559–569. [Google Scholar] [CrossRef]
- Gmira, M.; Gendreau, M.; Lodi, A.; Potvin, J.-Y. Tabu search for the time-dependent vehicle routing problem with time windows on a road network. Eur. J. Oper. Res. 2021, 288, 129–140, ISSN 0377-2217. [Google Scholar] [CrossRef]
- Liu, C.H.; Chen, Z.; Tang, J.; Xu, J.; Piao, C. Energy-Efficient UAV Control for Effective and Fair Communication Coverage: A Deep Reinforcement Learning Approach. IEEE J. Sel. Areas Commun. 2018, 36, 2059–2070. [Google Scholar] [CrossRef]
- Koch, W.; Mancuso, R.; West, R.; Bestavros, A. Reinforcement Learning for UAV Attitude Control. ACM Trans. Cyber-Phys. Syst. 2019, 3, 22. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- ITWL. Available online: https://pl.wikipedia.org/wiki/ITWL_NeoX (accessed on 11 March 2022).
- US. Government 383; U.S. Standard Atmosphere. U.S. Government: Washington, DC, USA, 1976.
- MIL-STD-1797A; Flying Qualities of Piloted Aircraft. Available online: https://engineering.purdue.edu/~andrisan/Courses/AAE490F_S2008/Buffer/mst1797.pdf (accessed on 11 March 2022).
- Matlab. Simulink Reference Model. Available online: https://www.mathworks.com/help/simulink/model-reference.html (accessed on 11 March 2022).
- Barton, J. Fundamentals of Small Unmanned Aircraft Flight. Johns Hopkins Apl. Tech. Dig. 2012, 31, 132–149. [Google Scholar]
- Duszak, P.; Siemiątkowska, B. The application of hexagonal grids in mobile robot Navigation. Proceedings of the Conference Mechatronics, Recent Advances Towards Industry, Advances in Intelligent Systems and Computing, Kunming, China, 22–24 May 2020; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1044, pp. 198–205. ISBN 978-3-030-29992-7. [Google Scholar]
- Elfes, A. Using occupancy grids for mobile robot perception and navigation. Computer 1989, 22, 46–57. [Google Scholar] [CrossRef]
- Chen, H.; Lu, P. Real-time identification and avoidance of simultaneous static and dynamic obstacles on point cloud for UAVs navigation. Robot. Auton. Syst. 2022, 154, 104124. [Google Scholar] [CrossRef]
- Wang, D.; Li, W.; Liu, X.; Li, N.; Zhang, C. UAV environmental perception and autonomous obstacle avoidance: A deep learning and depth camera combined solution. Comput. Electron. Agric. 2020, 175, 105523. [Google Scholar] [CrossRef]
- Rummelt, N. Array Set Addressing: Enabling Efficient Hexagonally Sampled Image Processing. Ph.D. Thesis, Unversity of Florida, Gainesville, FL, USA, 2010. [Google Scholar]
- Stecz, W.; Gromada, K. Determining UAV Flight Trajectory for Target Recognition Using EO/IR and SAR. Sensors 2020, 20, 5712. [Google Scholar] [CrossRef] [PubMed]
- Barnhart, C.; Johnson, E.L.; Nemhauser, G.L.; Savelsbergh, M.W.P.; Vance, P.H. Branch-And-Price: Column Generation for Solving Huge Integer Programs. Oper. Res. 1998, 46, 316–329. [Google Scholar] [CrossRef] [Green Version]



















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chodnicki, M.; Siemiatkowska, B.; Stecz, W.; Stępień, S. Energy Efficient UAV Flight Control Method in an Environment with Obstacles and Gusts of Wind. Energies 2022, 15, 3730. https://doi.org/10.3390/en15103730
Chodnicki M, Siemiatkowska B, Stecz W, Stępień S. Energy Efficient UAV Flight Control Method in an Environment with Obstacles and Gusts of Wind. Energies. 2022; 15(10):3730. https://doi.org/10.3390/en15103730
Chicago/Turabian StyleChodnicki, Marcin, Barbara Siemiatkowska, Wojciech Stecz, and Sławomir Stępień. 2022. "Energy Efficient UAV Flight Control Method in an Environment with Obstacles and Gusts of Wind" Energies 15, no. 10: 3730. https://doi.org/10.3390/en15103730