Multi-Objective Human Resource Allocation Approach for Sustainable Traffic Management



Abstract
1. Introduction
- Number of road accidents in India was 464,910 in 2017, causing 147,913 deaths and 470,975 injuries
- The top eleven Indian cities, namely Bhopal, Chennai, Delhi, Hyderabad, Indore, Jabalpur, Jaipur, Kochi, Kolkata, Mumbai, and Mallapuram accounted for 51.1% of the RTI
Literature Review
2. Mathematical Model
| List of notations | |
| Sets | |
| T | traffic manpower resources types (index: t); t = a, s, c, h, v |
| number of available manpower resources of types t, | |
| i | number of road segments, i = 1, 2, … , m |
| j | number of shifts, j = 1, 2, … , n |
| s | special event of event types, s = 1, 2, … , p |
| Parameters | |
| minimum number of total traffic personnel that need to be allocated to i-th road-segment and j-th shift | |
| operational cost of traffic personnel of type t | |
| length of i-th road | |
| if there is possibility a special event occurring or higher traffic flow in i-th road-segment and j-th shift; , other wise | |
| average number of cases logged by traffic personnel of type t in each shift | |
| special event of type s occurred at j-th shift, | |
| minimum number of personnel that needs to be allotted to s-th event | |
| minimum number of personnel that needs to be allotted to surveillance at j-th shift | |
| minimum number of personnel that needs to be allotted to emission controls | |
| Decision Variables | |
| , if -th traffic personnel of type t is allocated to i-th road segment in j-th shift; , otherwise |
- The first objective minimizes the sum of total allocation cost in all roads and shifts in a particular day:Therefore, G1 ensures that the overall allocation cost remains manageable.
- The second objective maximizes the allocation of Sergeants to all accident-prone roads:Therefore, based on the prior information, more Sergeants need to be allocated on accident-prone road segments.
- The third objective minimizes the total number of volunteer personnel in the entire allocation scheme:Therefore, G3 ensures that manpower in the existing system should be utilized as efficiently as possible.
- Finally, the fourth objective maximizes the number of direct contracts to identify traffic and emission rule violations:Note that G4 maximizes the direct contract related with rule violation; emission etc. Traffic rule violations and vehicular emissions have become regular occurrences in India. In particular, the city Kolkata is considered to be one of the most polluted cities in India in terms of air pollution. Vehicular emission is considered to be one of the key causes of this poor situation. On the other hand the number of vehicles are increasing rapidly and the violation of traffic rules has become a common phenomenon. KTP Yearbook stated that 7,470,380 cases were lodged against traffic rule violation and 102,943 cases were lodged against rash driving in 2017. KTP is not only committed to maintaining smooth traffic flow but also to managing these rule violations. KTP employs dedicated teams to control these situations. Therefore, we incorporate this goal so that direct contact can be improved as much as possible [6,13]. The functional and operational constraints for the proposed multi-objective optimization model are as follows:Constraint (1) ensures that an individual traffic personnel cannot be allocated to more then two shifts in a day. Constraint (2) represents the minimum requirement of traffic resources in shift and road segment. This constraint ensures that at least some manpower should be allocated to each road and shift from all five types of personnel. Constraint (3) and (4) represent the allocation of volunteer traffic resources, i.e., Home-Guards (h), and Civic- Volunteers (v) can be assigned with either an ASI or a Constable. Constraint (5) ensures the unavailability of ASIs, Sergeants, and Constables on a particular day. Constraint (6) represents that the allocation of ASIs, Sergeants and Constables is not possible for two consecutive shifts. Note that Home-Guards or Civic-Volunteers can be allocated in consecutive shifts. Constraint (7) represents the allocation of type traffic resources to manage type of special events occur in shift. Constraint (8) represents the allocation of ASIs and Sergeants for surveillance purposes in road segment and shift. Constraint (9) represents the allocation of Civic-Volunteers for emission reduction purposes in shift. The complexity of the above multi-objective binary linear programming model is a function of problem size affected by the set of road segments, set of shifts, number of five types of manpower resources, and therefore the model consists of binary decision variables.
3. Solution Procedure
- Step 1:
- Determine the positive ideal solution() and the negative ideal solution() for each objective function () by solving each objective function while ignoring the other objective function subject to set of constraints.
- Step 2:
- Construct linear membership functions featuring both the continuously increasing property of the maximization objective function and the decreasing property of the minimization objective function. For the maximization objective goal ():For the minimization type objective function ():where the possible range for the r-th objective is , ().
- Step 3:
- Solve the following optimization problem in Phase 1 as given below:Note that membership functions in the two-phase approach do not have an upper or lower bound unlike the conventional max-min operator approach. Therefore, in Phase 1, each objective function might not attain the lowest or highest possible compromise value because in a decision making context, the fuzzy goals are set by the decision maker through subjective domain knowledge. Therefore, if we optimize in Phase I, we first obtain a trade-off among all objectives.
- Step 4:
- Finally, Phase II provides the flexibility to reach optimal for each objective by relaxing this constraint. The decision-maker needs to solve the following optimization problem in this regard:where is the optimal value of obtained in Phase I. If , , then there are no better efficient solutions for the model compared to Phase I and if for at least one r, the solution obtained in Phase II is more efficient. In this way in Phase II, the decision makers have the opportunity to improve the solution based on the each objective. In addition, by comparing, the optimal values of , the decision maker can gain knowledge about the improvement of the previous solution. Two-phase approach has been widely used in recent years due to its flexibility ([52]). Note that the optimal allocation in Phase II is a Pareto-optimal solution ([49]).
4. Case Study
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Activities of Volunteers in Day-to-Day Operation

Appendix B. Detailed Numerical Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
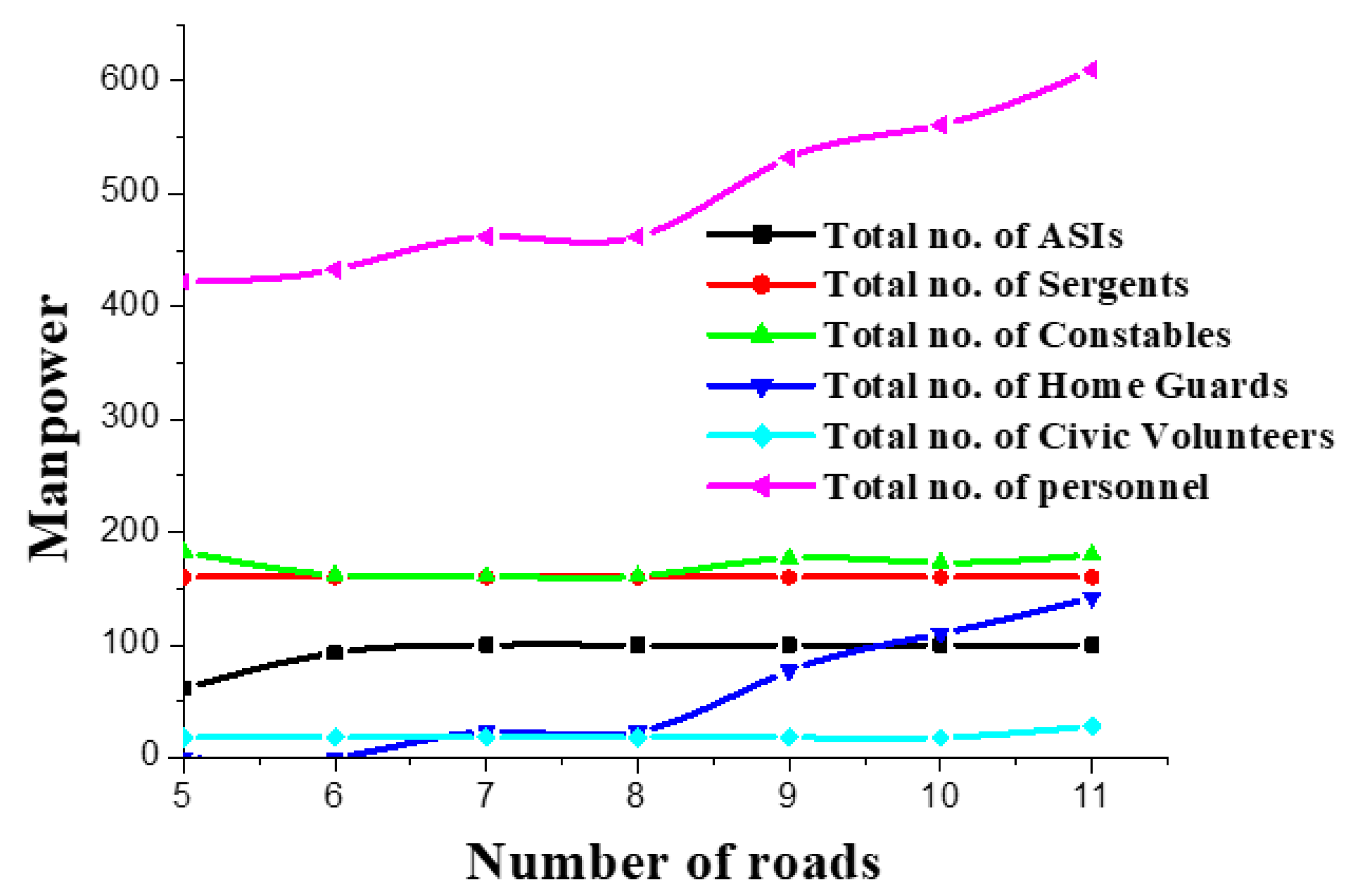
| Number of Roads | Obj 1 | Obj 2 | Obj 3 | Obj 4 | a | s | c | h | b | Total (a + s + c + h + v) | CPU Time (Sce.) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | Obj1 | 223,200 | 0 | 158 | 449 | 81 | 0 | 19 | 140 | 18 | 258 | 95.15 |
| Obj2 | 430,000 | 32 | 116 | 1199 | 76 | 160 | 22 | 94 | 22 | 374 | ||
| Obj3 | 333,700 | 12.81 | 18 | 999 | 86 | 135 | 19 | 0 | 18 | 258 | ||
| Obj4 | 970,000 | 18.07 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 505,200 | 29.76 | 18 | 1541 | 61 | 160 | 183 | 0 | 18 | 422 | ||
| 6 | Obj1 | 257,600 | 0 | 174 | 525 | 97 | 0 | 23 | 156 | 18 | 294 | 112.15 |
| Obj2 | 625,500 | 29.33 | 401 | 1475.50 | 97 | 160 | 25 | 218 | 183 | 683 | ||
| Obj3 | 376,100 | 15.57 | 18 | 1129 | 98 | 155 | 17 | 0 | 18 | 288 | ||
| Obj4 | 970,000 | 17.05 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 522,600 | 28.30 | 18 | 1574 | 93 | 160 | 162 | 0 | 18 | 433 | ||
| 7 | Obj1 | 294,300 | 1 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 | 181.15 |
| Obj2 | 496,600 | 32 | 164 | 1332.50 | 98 | 160 | 28 | 145 | 19 | 450 | ||
| Obj3 | 407,100 | 18.23 | 41 | 1198 | 100 | 160 | 22 | 23 | 18 | 323 | ||
| Obj4 | 970,000 | 17.51 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 546,100 | 31.73 | 41 | 1615 | 100 | 160 | 161 | 23 | 18 | 462 | ||
| 8 | Obj1 | 326,800 | 2.91 | 192 | 727 | 100 | 32 | 28 | 174 | 18 | 352 | 458.15 |
| Obj2 | 492,900 | 31.87 | 137 | 1350 | 100 | 160 | 41 | 117 | 20 | 438 | ||
| Obj3 | 430,200 | 19.80 | 64 | 1242 | 100 | 160 | 29 | 46 | 18 | 353 | ||
| Obj4 | 970,000 | 16.38 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 569,200 | 31.87 | 64 | 1659 | 100 | 160 | 168 | 46 | 18 | 492 | ||
| 9 | Obj1 | 365,300 | 5.27 | 207 | 834 | 100 | 48 | 32 | 189 | 18 | 387 | 512.27 |
| Obj2 | 496,800 | 31.47 | 146 | 1352.50 | 100 | 160 | 40 | 119 | 27 | 446 | ||
| Obj3 | 456,900 | 20.73 | 95 | 1288.00 | 100 | 160 | 34 | 77 | 18 | 389 | ||
| Obj4 | 970,000 | 22.18 | 700 | 2200.00 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 599,900 | 31.47 | 95 | 1717 | 100 | 160 | 177 | 77 | 18 | 532 | ||
| 10 | Obj1 | 405,200 | 7.1905 | 224 | 943 | 100 | 64 | 36 | 206 | 18 | 424 | 514.27 |
| Obj2 | 522,400 | 31.733 | 176 | 1397.50 | 100 | 160 | 47 | 137 | 39 | 483 | ||
| Obj3 | 487,000 | 18.833 | 128 | 1342 | 100 | 160 | 41 | 110 | 18 | 429 | ||
| Obj4 | 970,000 | 20.029 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 619,000 | 30.45 | 128 | 1738 | 100 | 160 | 173 | 110 | 18 | 561 | ||
| 11 | Obj1 | 444,400 | 7.89 | 240 | 1051 | 100 | 80 | 40 | 222 | 18 | 460 | 615.09 |
| Obj2 | 557,800 | 30.08 | 232 | 1442 | 100 | 160 | 43 | 194 | 38 | 535 | ||
| Obj3 | 512,400 | 15.93 | 160 | 1383 | 100 | 160 | 44 | 142 | 18 | 464 | ||
| Obj4 | 970,000 | 15.36 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | ||
| Phase2 | 648,400 | 30.08 | 160 | 1791 | 100 | 160 | 180 | 142 | 28 | 610 |
| Number of Roads | Obj1 | Obj2 | Obj3 | Obj4 | a | s | c | h | v | Total | CPU Time (Sec.) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 223,200 | 0 | 158 | 449 | 81 | 0 | 19 | 140 | 18 | 258 | 13.41 |
| 6 | 257,600 | 0 | 172 | 526 | 99 | 0 | 22 | 154 | 18 | 293 | 19.81 |
| 7 | 294,300 | 1.6257 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 | 20.63 |
| 8 | 326,800 | 6.1667 | 192 | 727 | 100 | 32 | 28 | 174 | 18 | 352 | 42.97 |
| 9 | 365,300 | 8.9333 | 207 | 834 | 100 | 48 | 32 | 189 | 18 | 387 | 106.95 |
| 10 | 405,200 | 12.4 | 224 | 943 | 100 | 64 | 36 | 206 | 18 | 424 | 187.17 |
| 11 | 439,600 | 14.23 | 232 | 1045 | 100 | 80 | 40 | 218 | 14 | 452 | 366.21 |
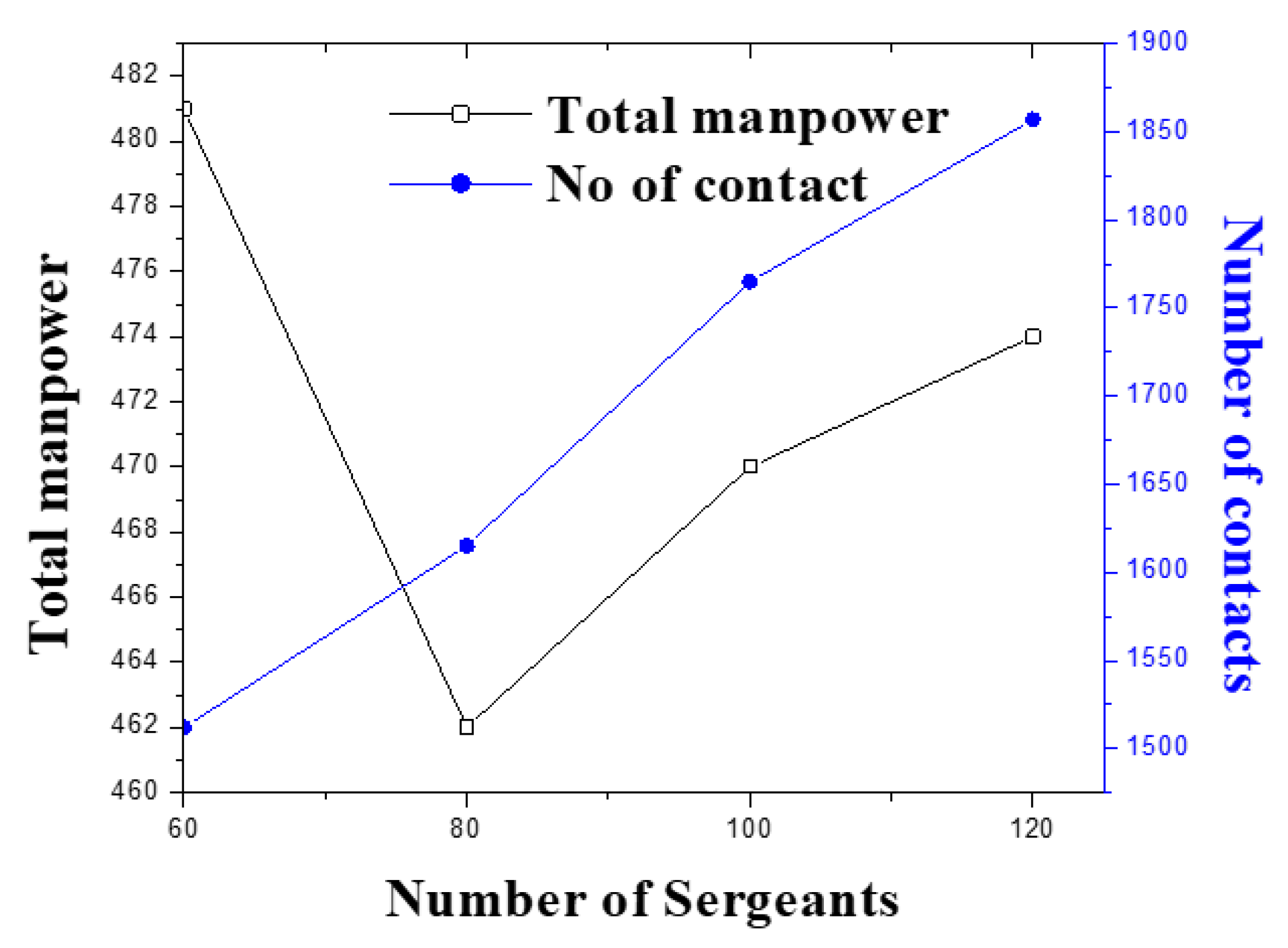
| Sergeants | Obj1 | Obj2 | Obj3 | Obj4 | a | s | c | h | v | Total Manpower (a + s + c + h + v) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 60 | Obj1 | 294,300 | 1.53 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 |
| Obj2 | 440,400 | 24.00 | 164 | 1143.50 | 99 | 120 | 31 | 143 | 21 | 414 | |
| Obj3 | 380,100 | 13.78 | 81 | 1053 | 100 | 120 | 27 | 63 | 18 | 328 | |
| Obj4 | 910,000 | 13.78 | 700 | 2000 | 100 | 120 | 200 | 300 | 400 | 1120 | |
| Phase2 | 533,100 | 24.00 | 81 | 1512 | 100 | 120 | 180 | 63 | 18 | 481 | |
| 80 | Obj1 | 294,300 | 1.00 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 |
| Obj2 | 496,600 | 32.00 | 164 | 1332.50 | 98 | 160 | 28 | 145 | 19 | 450 | |
| Obj3 | 407,100 | 18.23 | 41 | 1198 | 100 | 160 | 22 | 23 | 18 | 323 | |
| Obj4 | 970,000 | 17.51 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | |
| Phase2 | 546,100 | 31.73 | 41 | 1615 | 100 | 160 | 161 | 23 | 18 | 462 | |
| 100 | Obj1 | 294,300 | 1.85 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 |
| Obj2 | 564,000 | 40 | 168 | 1549.50 | 100 | 200 | 31 | 145 | 23 | 499 | |
| Obj3 | 419,900 | 19.73 | 18 | 1282 | 92 | 191 | 14 | 0 | 18 | 315 | |
| Obj4 | 1,030,000 | 16.62 | 700 | 2400 | 100 | 200 | 200 | 300 | 400 | 1200 | |
| Phase2 | 581,000 | 38.97 | 18 | 1765 | 100 | 200 | 152 | 0 | 18 | 470 | |
| 120 | Obj1 | 294,300 | 1.34 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 |
| Obj2 | 617,300 | 48 | 159 | 1739 | 100 | 240 | 30 | 139 | 20 | 529 | |
| Obj3 | 423,500 | 24.14 | 18 | 1306 | 80 | 203 | 14 | 0 | 18 | 315 | |
| Obj4 | 1,090,000 | 27.06 | 700 | 2600 | 100 | 240 | 200 | 300 | 400 | 1240 | |
| Phase2 | 605,000 | 46.97 | 18 | 1857 | 100 | 240 | 116 | 0 | 18 | 474 |
| Volunteers | Obj1 | Obj2 | Obj3 | Obj4 | a | s | c | h | v | Total Manpower (a + s + c + h + v) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
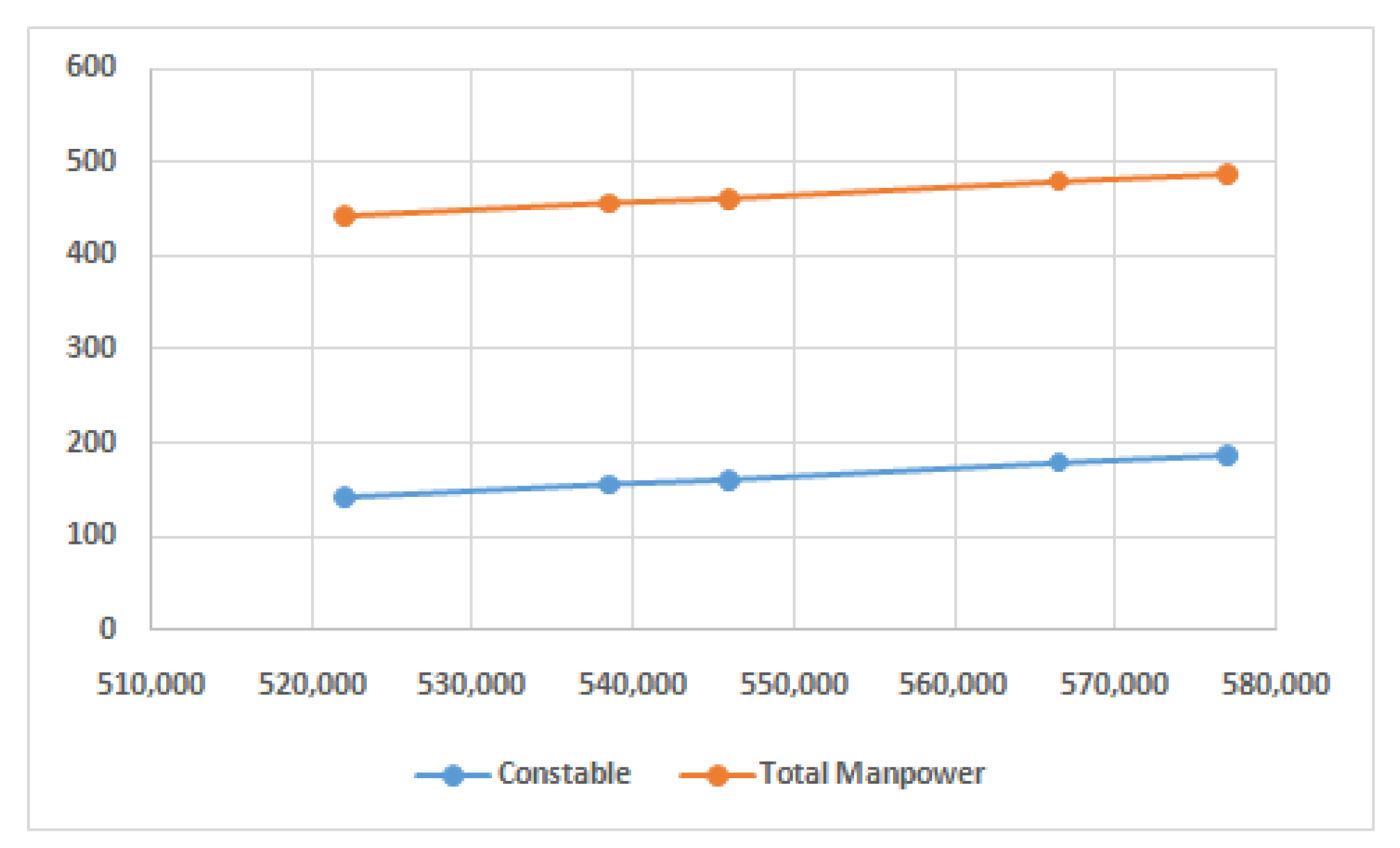
| h-560 | Obj1 | 268,840 | 0.80 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 |
| v-400 | Obj2 | 474,400 | 32 | 164 | 1332.50 | 98 | 160 | 28 | 145 | 19 | 450 |
| Obj3 | 402,080 | 18.23 | 41 | 1198 | 100 | 160 | 22 | 23 | 18 | 323 | |
| Obj4 | 888,000 | 17.51 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | |
| Phase2 | 522,080 | 31.73 | 41 | 1558 | 100 | 160 | 142 | 23 | 18 | 443 | |
| h-630 | Obj1 | 281,570 | 0.80 | 187 | 626.00 | 100 | 14 | 26 | 169 | 18 | 327 |
| v-450 | Obj2 | 485,500 | 32.00 | 164 | 1332.50 | 98 | 160 | 28 | 145 | 19 | 450 |
| Obj3 | 404,590 | 18.23 | 41 | 1198.00 | 100 | 160 | 22 | 23 | 18 | 323 | |
| Obj4 | 929,000 | 17.51 | 700 | 2200.00 | 100 | 160 | 200 | 300 | 400 | 1160 | |
| Phase2 | 538,590 | 31.73 | 41 | 1600.00 | 100 | 160 | 156 | 23 | 18 | 457 | |
| h-700 | Obj1 | 294,300 | 1 | 187 | 626 | 100 | 14 | 26 | 169 | 18 | 327 |
| v-500 | Obj2 | 496,600 | 32 | 164 | 1332.5 | 98 | 160 | 28 | 145 | 19 | 450 |
| Obj3 | 407,100 | 18.233 | 41 | 1198 | 100 | 160 | 22 | 23 | 18 | 323 | |
| Obj4 | 970,000 | 17.514 | 700 | 2200 | 100 | 160 | 200 | 300 | 400 | 1160 | |
| Phase2 | 546,100 | 31.73 | 41 | 1615 | 100 | 160 | 161 | 23 | 18 | 462 | |
| h-770 | Obj1 | 307,030 | 1.34 | 187 | 626.00 | 100 | 14 | 26 | 169 | 18 | 327 |
| v-550 | Obj2 | 507,700 | 32.00 | 164 | 1332.50 | 98 | 160 | 28 | 145 | 19 | 450 |
| Obj3 | 409,610 | 18.23 | 41 | 1198.00 | 100 | 160 | 22 | 23 | 18 | 323 | |
| Obj4 | 1,011,000 | 17.51 | 700 | 2200.00 | 100 | 160 | 200 | 300 | 400 | 1160 | |
| Phase2 | 566,610 | 31.73 | 41 | 1669.00 | 100 | 160 | 179 | 23 | 18 | 480 | |
| h-840 | Obj1 | 319,760 | 1.34 | 187 | 626.00 | 100 | 14 | 26 | 169 | 18 | 327 |
| v-600 | Obj2 | 518,800 | 32.00 | 164 | 1332.50 | 98 | 160 | 28 | 145 | 19 | 450 |
| Obj3 | 412,120 | 18.23 | 41 | 1198.00 | 100 | 160 | 22 | 23 | 18 | 323 | |
| Obj4 | 1,052,000 | 17.51 | 700 | 2200.00 | 100 | 160 | 200 | 300 | 400 | 1160 | |
| Phase2 | 577,120 | 31.73 | 41 | 1693.00 | 100 | 160 | 187 | 23 | 18 | 488 |
References
- Mock, C.; Kobusingye, O.; Anh, L.V.; Afukaar, F.; Arreola-Risa, C. Human resources for the control of road traffic injury. Bull. World Health Organ. 2005, 83, 294–300. [Google Scholar] [PubMed]
- Diakaki, C.; Papageorgiou, M.; Papamichail, I.; Nikolos, I. Overview and analysis of vehicle automation and communication systems from a motorway traffic management perspective. Transp. Res. A Policy Pract. 2015, 75, 147–165. [Google Scholar] [CrossRef]
- WHO. Global Status Report on Road Safety. 2015. Available online: https://www.who.int/violence_injury_prevention/road_safety_status/2015/en/ (accessed on 7 December 2019).
- WHO. Global Status Report on Road Safety. 2018. Available online: https://www.who.int/violence_injury_prevention/road_safety_status/2018/en/ (accessed on 7 December 2019).
- Mortal, G.B. Global, regional, and national age-sex specific all-cause and cause-specific mortality for 240 causes of death, 1990–2013: A systematic analysis for the global burden of disease study 2013. Lancet 2015, 385, 117–171. [Google Scholar]
- KTPAR. Kolkata Traffic Police Annual Review. 2017. Available online: http://www.kolkatatrafficpolice.gov.in/ (accessed on 7 December 2019).
- Rolison, J.J.; Regev, S.; Moutari, S.; Feeney, A. What are the factors that contribute to road accidents? An assessment of law enforcement views, ordinary drivers’ opinions, and road accident records. Accid. Anal. Prev. 2018, 15, 11–24. [Google Scholar] [CrossRef]
- Ministry of Health and Family Welfare. Integrated Disease Surveillance Project—Project Implementation Plan 2004–2009; Government of India: New Delhi, India, 2004; pp. 1–18.
- Gururaj, G.; Uthkarsh, P.S.; Rao, G.N.; Jayaram, A.N.; Panduranganath, V. Burden, pattern and outcomes of road traffic injuries in a rural district of India. Int. J. Inj. Contr. Saf. Promot. 2016, 23, 64–71. [Google Scholar] [CrossRef]
- Government of India. Road Accidents in India—2017. Available online: http://www.indiaenvironmentportal.org.in/files/file/road%20accidents%20in%20India%202017.pdf (accessed on 7 December 2019).
- Ruikar, M. National statistics of road traffic accidents in India. J. Orthop. Traumatol. Rehabil. 2013, 6, 1–6. [Google Scholar] [CrossRef]
- Traffic Jam in 4 Metros Costs More Than Entire Rail Budget; This city has worst peak-hour congestion. Financial Express, 26 April 2018. Available online: https://www.financialexpress.com/economy/traffic-jam-in-4-metros-costs-more-than-entire-rail-budget-this-city-has-worst-peak-hour-congestion/1146356/ (accessed on 7 December 2019).
- KTPAR. Kolkata Traffic Police Annual Review. 2018. Available online: http://www.kolkatatrafficpolice.gov.in/ (accessed on 7 December 2019).
- Bao, J.; Bachani, A.M.; Viet, C.P.; Quang, L.N.; Nguyen, N.; Hyder, A.A. Trends in motorcycle helmet use in Vietnam: Results from a four-year study. Public Health 2017, 144, S39–S44. [Google Scholar] [CrossRef]
- Kitamura, Y.; Hayashi, M.; Yagi, E. Traffic problems in southeast asia featuring the case of cambodia’s traffic accidents involving motorcycles. IATSS Res. 2018, 42, 163–170. [Google Scholar] [CrossRef]
- Ma, S.; Li, Q.; Zhou, M.; Duan, L.; Bishai, D. Road traffic injury in China: A review of national data sources. Traffic Inj. Prev. 2012, 13, 57–63. [Google Scholar] [CrossRef]
- Wedagama, D.M.P. The influence of young and male motorists’ accident: Factors on motorcycle injuries in Bali. IATSS Res. 2009, 33, 64–75. [Google Scholar] [CrossRef]
- Lee, S.M.; Franz, L.S.; Wynne, A.J. Optimizing state patrol manpower allocation. J. Oper. Res. Soc. 1979, 30, 885–896. [Google Scholar] [CrossRef]
- Kwak, N.K.; Leavitt, M.B. Police patrol beat design: Allocation of effort and evaluation of expected performance. Decis. Sci. 1984, 15, 421–433. [Google Scholar] [CrossRef]
- Basu, M.; Ghosh, D. Nonlinear goal programming model for the development of metropolitan police patrol units. Opsearch 1997, 34, 27–42. [Google Scholar] [CrossRef]
- D’Amico, S.J.; Wang, S.J.; Batta, R.; Rump, C.M. A simulated annealing approach to police district design. Comput. Oper. Res. 2002, 29, 667–684. [Google Scholar] [CrossRef]
- Balaji, P.G.; Srinivasan, D. Type-2 fuzzy logic based urban traffic management. Eng. Appl. Artif. Intell. 2011, 24, 12–22. [Google Scholar] [CrossRef]
- Zhao, K.Q.; Luo, L.; Xia, Y.M. The Optimal Dispatch of Traffic and Patrol Police Service Platforms. J. Appl. Math. 2012, 2012, 292415. [Google Scholar] [CrossRef]
- Adler, N.; Hakkert, A.S.; Kornbluth, J.; Raviv, T.; Sher, M. Location-allocation models for traffic police patrol vehicles on an interurban network. Ann. Oper. Res. 2014, 221, 9–31. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z.; Shi, J.; Wang, Y.; Zhang, J.; Liu, J. K-shortest-path-based evacuation routing with police resource allocation in city transportation networks. PLoS ONE 2015, 10, e0131962. [Google Scholar] [CrossRef]
- Parr, S.; Wolshon, B. Methodology for simulating manual traffic control. Transp. Res. Rec. 2016, 2562, 9–17. [Google Scholar] [CrossRef]
- Adler, N.; Hakkert, A.S.; Raviv, T.; Sher, M. The traffic police location and schedule assignment problem. J. Multi-Criteria Decis. Anal. 2014, 21, 315–333. [Google Scholar] [CrossRef]
- Dunnett, S.; Leigh, J.; Jackson, L. Optimising police dispatch for incident response in real time. J. Oper. Res. Soc. 2019, 70, 269–279. [Google Scholar] [CrossRef]
- Gudwin, R.; Paraense, A.; de Paula, S.M.; Fróes, E.; Gibaut, W.; Castro, E.; Figueiredo, V.; Raizer, K. An urban traffic controller using the MECA cognitive architecture. Biol. Inspir. Cogn. Arc. 2018, 26, 41–54. [Google Scholar] [CrossRef]
- Ehrgott, M. Multicriteria Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Sharma, D.K.; Ghosh, D.; Gaur, A. Lexicographic goal programming model for police patrol cars deployment in metropolitan cities. Int. J. Inf. Manag. Sci. 2007, 18, 173–188. [Google Scholar]
- Miettinen, K. Nonlinear Multiobjective Optimization; Kluwer: Boston, MA, USA, 1999. [Google Scholar]
- Wierzbicki, A.P. Reference Point Approaches. Multicriteria Decision Making; Springer: Boston, MA, USA, 1999; pp. 237–275. [Google Scholar]
- Gardiner, L.R.; Steuer, R.E. Unified interactive multiple objective programming. Eur. J. Oper. Res. 1994, 74, 391–406. [Google Scholar] [CrossRef]
- Miettinen, K.; Mäkelä, M.M. Interactive bundle-based method for nondifferentiable multiobjeective optimization: Nimbus. Optimization 1995, 34, 231–246. [Google Scholar] [CrossRef]
- Ben-Tal, A.; El Ghaoui, L.; Nemirovski, A. Robust Optimization; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Tanino, T.; Tanaka, T.; Inuiguchi, M. (Eds.) Multi-Objective Programming and Goal Programming: Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 21. [Google Scholar]
- Shapiro, A.; Dentcheva, D.; Ruszczyński, A. Lectures on Stochastic Programming: Modeling and Theory; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2014. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Zimmermann, H.J. Fuzzy programming and linear programming with several objective functions. Fuzzy Set Syst. 1978, 1, 45–55. [Google Scholar] [CrossRef]
- Sakawa, M.; Yano, H.; Nishizaki, I.; Nishizaki, I. Linear and Multiobjective Programming with Fuzzy Stochastic Extensions; Springer US: New York, NY, USA, 2013. [Google Scholar]
- Moghaddam, K.S. Fuzzy multi-objective model for supplier selection and order allocation in reverse logistics systems under supply and demand uncertainty. Expert Syst. Appl. 2015, 42, 6237–6254. [Google Scholar] [CrossRef]
- Moon, I.; Jeong, Y.; Saha, S. Fuzzy bi-objective production-distribution planning problem under the carbon emission constraint. Sustainability 2016, 8, 798. [Google Scholar] [CrossRef]
- Chung, C.K.; Chen, H.M.; Chang, C.T.; Huang, H.L. On fuzzy multiple objective linear programming problems. Expert Syst. Appl. 2018, 114, 552–562. [Google Scholar] [CrossRef]
- Lee, E.S.; Li, R.J. Fuzzy multiple objective programming and compromise programming with pareto optimum. Fuzzy Set Syst. 1993, 53, 275–288. [Google Scholar]
- Guu, S.M.; Wu, Y.K. Two-phase approach for solving the fuzzy linear programming problems. Fuzzy Set Syst. 1999, 107, 191–195. [Google Scholar] [CrossRef]
- Arıkan, F.; Güngör, Z. A two-phase approach for multi-objective programming problems with fuzzy coefficients. Inf. Sci. 2007, 177, 5191–5202. [Google Scholar] [CrossRef]
- Jimenez, M.; Bilbao, A. Pareto-optimal solutions in fuzzy multi-objective linear programming. Fuzzy Set Syst. 2009, 160, 2714–2721. [Google Scholar] [CrossRef]
- Wu, Y.K.; Liu, C.C.; Lur, Y.Y. Pareto-optimal solution for multiple objective linear programming problems with fuzzy goals. Fuzzy Optim. Decis. 2015, 14, 43–55. [Google Scholar] [CrossRef]
- Garai, A.; Roy, T.K. Multi-objective optimization of cost-effective and customer-centric closed-loop supply chain management model in T-environment. Soft Comput. 2019, 24, 1–24. [Google Scholar] [CrossRef]
- Ali, S.; Saha, S.; Kaviraj, A. Fermented mulberry leaf meal as fishmeal replacer in the formulation of feed for carp Labeo rohita and catfish Heteropneustes fossilis—Optimization by mathematical programming. Trop. Anim. Health Prod. 2019, 52, 839–849. [Google Scholar] [CrossRef]
- Guu, S.M.; Yu, J.; Wu, Y.K. A two-phase approach to finding a better managerial solution for systems with addition-min fuzzy relational inequalities. IEEE Trans. Fuzzy Syst. 2017, 26, 2251–2260. [Google Scholar] [CrossRef]
- Kim, I.Y.; De Weck, O.L. Adaptive weighted sum method for multiobjective optimization: A new method for Pareto front generation. Struct. Multidiscip. Optim. 2006, 31, 105–116. [Google Scholar] [CrossRef]
- Bui, V.H.; Hussain, A.; Lee, W.G.; Kim, H.M. Multi-Objective Optimization for Determining Trade-Off between Output Power and Power Fluctuations in Wind Farm System. Energies 2019, 12, 4242. [Google Scholar] [CrossRef]
- Mukherjee, A.; Mukherjee, G.; Banerji, U.; Mukhopadhyay, S.P. Occupational Exposure of the Traffic Personnel of Calcuta to Lead and Carbonmonoxide. Pollut. Res. 1998, 17, 359–362. [Google Scholar]
- CMS ENVIS. Green Voice Quarterly Newsletter. 2015. Available online: http://cmsenvis.nic.in/qnewsletter/air_pollution.pdf (accessed on 7 December 2019).




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanyal, S.N.; Nielsen, I.; Saha, S. Multi-Objective Human Resource Allocation Approach for Sustainable Traffic Management. Int. J. Environ. Res. Public Health 2020, 17, 2470. https://doi.org/10.3390/ijerph17072470
Sanyal SN, Nielsen I, Saha S. Multi-Objective Human Resource Allocation Approach for Sustainable Traffic Management. International Journal of Environmental Research and Public Health. 2020; 17(7):2470. https://doi.org/10.3390/ijerph17072470
Chicago/Turabian StyleSanyal, Soumendra Nath, Izabela Nielsen, and Subrata Saha. 2020. "Multi-Objective Human Resource Allocation Approach for Sustainable Traffic Management" International Journal of Environmental Research and Public Health 17, no. 7: 2470. https://doi.org/10.3390/ijerph17072470
APA StyleSanyal, S. N., Nielsen, I., & Saha, S. (2020). Multi-Objective Human Resource Allocation Approach for Sustainable Traffic Management. International Journal of Environmental Research and Public Health, 17(7), 2470. https://doi.org/10.3390/ijerph17072470