Abstract
Underwater gliders (UGs) are widely applied to regional exploration to find potential targets. However, the complex marine environment and special movement patterns make it difficult to plan their coverage path. In this paper, a novel multi-underwater gliders coverage path planning algorithm based on ant colony optimization (MGCPP-ACO) is proposed. First, according to the detection radius of the sonar and the motion process of the UGs, we establish a detection coverage model. Then, considering the motion constraints of the UGs and optimization objectives, we redesign the feasible region, transition probability, pheromone update rule and heuristic function of the ACO algorithm. Finally, we carry out three groups of experiments. The simulation results show that the MGCPP-ACO can cover almost the entire sea area and adapt to different initial positions and heading angles. In addition, compared with the traditional scan-line (SCAN) algorithm, the MGCPP-ACO has a higher coverage efficiency and lower coverage cost.
1. Introduction
The underwater glider (UG) is a new type of underwater vehicle, which has the characteristics of low cost, low energy consumption and low noise [1]. It can carry various sensors to perform tasks, such as ocean observation [2], biological observation [3] and ocean mapping [4]. In addition, the UG can also equip with passive sonar for area detection to find underwater targets [5]. Reasonable coverage path planning will significantly improve coverage efficiency and reduce coverage costs.
The multi-robots coverage path planning method is widely used in autonomous underwater vehicles, ground robots, UAVs and other carriers, mainly in area detection [6], post-disaster search and rescue [7] and 3D structure detection [8]. Considering the existence of thermoclines in the ocean and the special motion of the UG, Ref. [9] proposed a full-coverage path planning and obstacle avoidance (CCPP-OA) algorithm to make two UGs collect the data from the entire sea area. Kapoutsis proposed a DARP algorithm that converted multiple robot problems into a single robot problem, with each region corresponding to a robot to ensure full coverage [10]. Extending the traditional grid decomposition-based coverage path planning method, Nedjati used multiple drones to collect images of the earthquake site to assess the damage caused by the earthquake [11].
The premise of most current methods is that the detection range of the robot is always the same, so as to facilitate the pre-planning of the waypoints. When all the waypoints are traversed, the entire area can be covered. Ref. [12] considered that the terrain affected moving speed and detection radius of the robot. However, in the ocean environment, the situation is more complicated. Seawater temperature, salinity, depth, and seabed topography will significantly affect the detection ability of sonar [13,14]. Detection performance tends to vary at different locations in the region, so it is challenging to plan the waypoints in advance. In this paper, the heuristic function of the ant colony algorithm is redesigned so that the UGs can be adaptive to different detection radius and improve the detection effect.
In addition, although the characteristics of the UG make it very suitable for area detection, the coverage path planning is complicated. On the one hand, the saw-tooth pattern motion of the UG in three-dimensional space is easy to hit the seabed [15]. On the other hand, the UG cannot communicate with the commander under the water, so their navigation parameters can only be planned before entering the water. After entering the water, it will sail according to the saw-tooth pattern trajectory, but the navigation trajectory will directly affect the detection area [16]. Considering the UG’s motion pattern and communication constraints, we propose an adaptive coverage path planning algorithm for multiple UGs in the complex ocean environment. For the cooperation problem between multiple UGs, we give the cooperation strategy with reference to the working process of ant colony.
The contributions of this paper are as follows:
- (1)
- A detection coverage model for single period of the UG is proposed;
- (2)
- Redesign the feasible region of the ants adapt to the motion constraints of the UGs;
- (3)
- Reconstruct the transition probability, pheromone update rule and fitness function of ant colony algorithm to increase coverage efficiency and reduce coverage costs.
The rest of this paper is arranged as follows: Section 2 shows the motion process of UG. In Section 3, the regional detection coverage model is given. In Section 4, an adaptive coverage path planning algorithm based on MGCPP-ACO is proposed. Section 5 analyzes the simulation results of the algorithm and compare it with the traditional SCAN algorithm. Section 6 presents the conclusions.
2. Motion Process of UG
To reduce energy consumption, the UG does not carry underwater acoustic communication equipment, so the glider can only be set with mission parameters at the surface (a), and then dive to perform the mission. The UG will glide for one period in the saw-tooth pattern motion shown in Figure 1. A complete period of gliding includes the following steps:
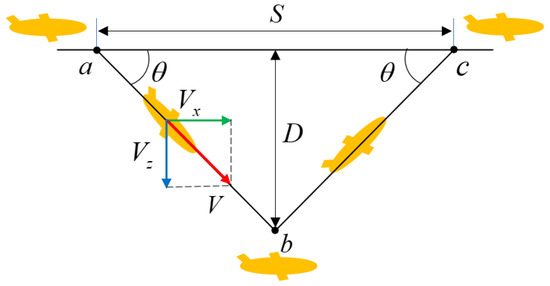
Figure 1.
The UG motion process.
- (a). Setting gliding parameters, including gliding angle, heading angle, depth, and then preparing to dive.
- (a–b). Reducing buoyancy, gliding down at glide angle and adjusting the wing angle. Influenced by the wings, the UG moves forward simultaneously during the diving process.
- (b). Adjusting buoyancy and preparing to float.
- (b–c). Increasing buoyancy, gliding upwards at glide angle and adjusting the wings to the opposite direction. Influenced by the wings, the UG moves forward simultaneously during the floating process.
- (c). Surfacing and reporting location.
3. Detection Coverage Modeling
3.1. Sonar Detection Probability
Underwater gliders are equipped with passive sonar to detect targets. The detection probability of the sonar presents a normal distribution, as shown in Figure 2.
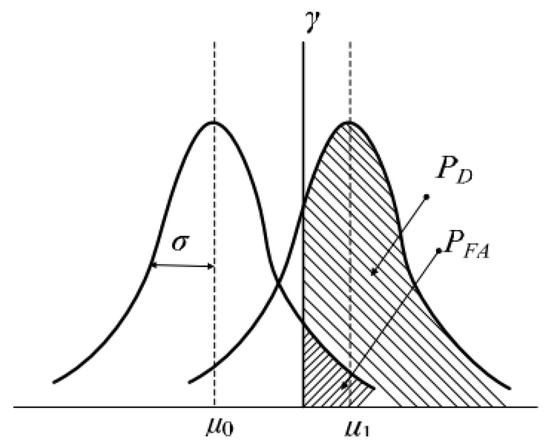
Figure 2.
Normal distribution of detection probability of sonar.
Then the detection probability and false alarm probability can be expressed as:
where is the signal mean, is the noise mean, is the noise variance, is the detection threshold, is the standard normal distribution function.
The signal margin can be expressed as:
where , when = 0, it is expressed as the system output signal-to-noise ratio; is the signal-to-noise ratio when the false alarm probability and detection probability are constant.
The underwater glider is equipped with passive sonar, which can be obtained from the sonar equation:
The FOM is the inherent property of the sonar, which is generally a constant under the condition that the background noise is relatively stable, and TL represents the propagation loss, which is related to the location of the sonar and the pressure , relative azimuth , relative distance , and depth of the detection point.
Using Equations (3) and (4), the detection probability can be expressed as:
Equation (5) shows that the sonar target detection probability is closely related to the marine environment.
3.2. Detection Radius Map
We construct the map using the grid method [17]. The dimension of the grid map is , where is the number of rows and is the number of columns. Complex marine environment leads to uneven detection radius of sonar. We adopt the calculation method of literature [18] to calculate the detection radius.
The whole area is discretized into M × N sub-areas, and the detection efficiency of each sub-area is calculated separately to obtain the detection efficiency of the whole area. The specific calculation steps are as follows:
(1) At a certain depth , divide the entire area into multiple sub-areas, as shown in Figure 3.
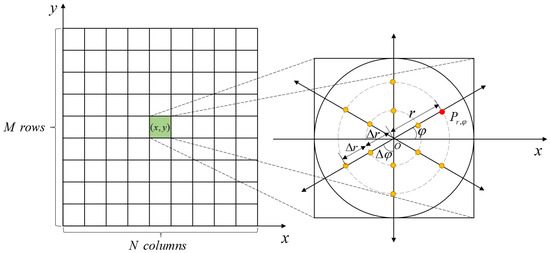
Figure 3.
The calculation method of the radius.
(2) Based on the center point of each sub-areas, according to azimuth interval and distance step , take a series of sampling points. Then, calculate the detection probability of each calculation point using Equation (5).
Where is the probability of calculation point which is located at relative azimuth and relative distance ;
(3) For a specific azimuth , if greater than the detection threshold , it is considered that the point can be detected. is the maximum detectable distance in the azimuth, as shown in Equation (6).
(4) The average of the detection distances in all directions is recorded as the detection radius of this sub-area, indicating the distance that can be detected if the underwater glider is located in this sub-area.
where is the detection radius at the grid .
The detection radius of different points is shown in Figure 4. The warmer the color of the grid, the larger the detection radius, and vice versa.
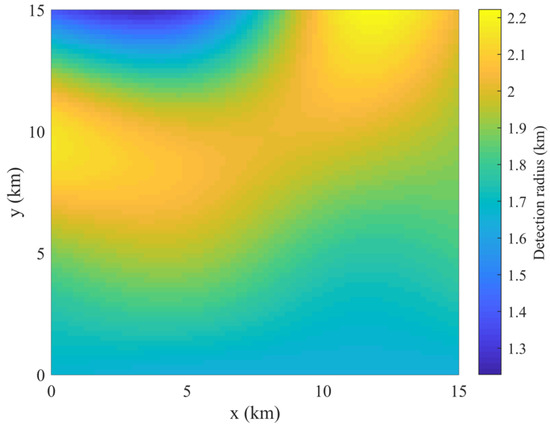
Figure 4.
Detection radius map.
In general, the detection radius of the UG is much larger than the depth of the seabed topography. Therefore, we assume that the UG can detect all depth ranges of the current grid, and we only need to consider the 2D coverage effect.
At time , the state of the grid is , using binary encoding, which is set to 1 if the grid is covered, and set to 0 if the grid is not covered. Assuming the glider is in grid at time , its detection range follows:
where represents the Euclidean distance between the surrounding grid and the grid where the glider is currently located.
3.3. Detection Model of One-Period Gliding
The UG will glide for one period in the saw-tooth pattern motion shown in Figure 1. Assuming that the diving gliding angle and the ascending gliding angle are the same as , and the steady-state gliding speed is , the vertical speed and horizontal speed can be calculated as follows:
Assuming the horizontal distance for one period of gliding:
where is the dive depth. The time required to glide one period is:
At time , the UG is ready to start a period of gliding. The UG enters the water from point , and glides one period at heading angle . The water outlet point and the water inlet point satisfy the following relationship:
where is the water outlet time.
The UG will detect during the entire gliding period and update the grid coverage state according to Equation (8).
4. MGCPP-ACO
4.1. Optimization Objective
Multiple UGs may cover the same grid repeatedly. As long as any UG covers the grid, the grid is considered to be covered. represents the situation of grid coverage map after periods and it can be calculated:
where is the number of UGs.
The optimization objective is to maximize the area coverage rate after UGs glide for periods, as shown in the following formula:
where is the area coverage rate.
4.2. Ant Colony Optimization
The ant colony optimization (ACO) algorithm is an intelligent optimization algorithm, which has good advantages in discrete optimization problems [19]. The ants are considered UGs for coverage path planning. The mapping relationship between UGs and ants is shown in Table 1:

Table 1.
The mapping relationship between UGs and ants.
We improve the algorithm based on ant colony optimization to meet the UG’s motion constraints and optimization objectives. In each iteration, we use groups of ants, and each group has ants, corresponding to UGs. The initial position of the ants corresponds to the initial position of the UGs, and the initial heading of the ants corresponds to the initial heading of the UGs.
4.2.1. Collaboration Strategy
Specifically, each group of ants walks in turn according to the transition probability and stops after walking for P periods in each iteration. After the ants in one iteration have all walked, the pheromone on the updated path provides a reference for the ants in the next iteration. As the iteration progresses, the ants’ paths will gradually converge. The final convergent path is the optimal path for area coverage.
4.2.2. Feasible Region Constraints
Considering the special kinematic characteristics of UGs, the feasible region needs to be redesigned. Firstly, UGs have special motion trajectories. The horizontal distance for one gliding period is affected by the gliding angle and the depth, and both of them have limitations that lead to the limited water exit point. Secondly, the flexibility of the UG is low, and it cannot complete a large turn, so there is a constraint on the amount of change in the turning angle. Therefore, the feasible region is a restricted set of water outlet points.
From Equation (10), the relationship between the single-period horizontal distance and the profile depth and gliding angle variation can be shown in Figure 5. When the gliding angle is the largest and the depth is the smallest, the single period gliding horizontal distance takes the smallest value . When the gliding angle is the smallest and the depth is the largest, the single period gliding horizontal distance takes the maximum value .
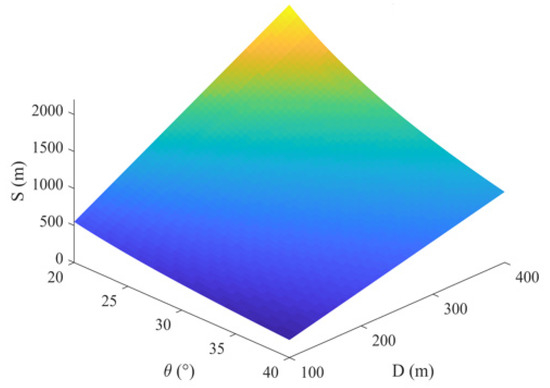
Figure 5.
The relationship between the single-period horizontal distance and the profile depth and gliding angle.
is the heading angle of the period and the heading change angle is . The heading angle range of the period is . The heading angle is defined as the angle between the positive direction of the axis. and can be calculated:
The maximum horizontal distance of gliding, the minimum horizontal distance of gliding and the heading angle jointly constrain the feasible region. The next exit point of the UG will be in the fan-shaped area as shown in Figure 6.
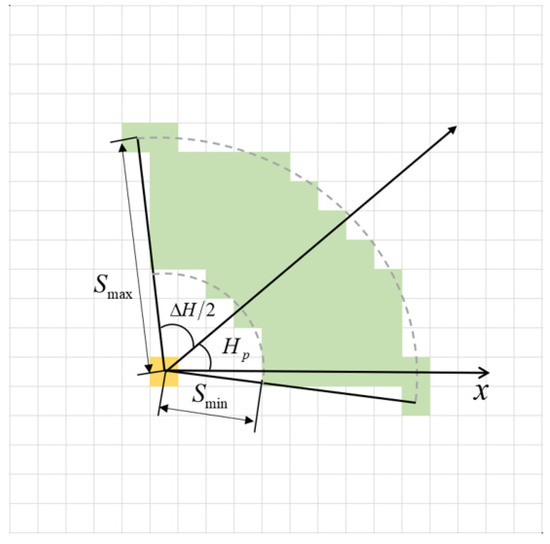
Figure 6.
Feasible region constraints.
Considering the special zigzag motion trajectory of the UG, it may bottom out during the gliding process, so it is necessary to further constrain the feasible region. According to the motion model of the UG, all the waypoints of the UG can be calculated. If the depth of a point in the waypoint is greater than the terrain depth, the grid is marked as an unreachable point and removed from the feasible region.
Restricted by terrain and steering, the feasible region may be empty. At this time, the ant is determined to be a dead ant, and will not walk in the future. The fitness of this ant is set to -Inf.
4.2.3. State Transition Rule
The th ant in each group of ants chooses the next path in turn, and the probability of the th ant transferring from the grid to the grid at time is , which is calculated by the following formula:
where is the set of grids that th ant can choose in the next step at time .
represents the pheromone concentration between grid and grid at time . There are pheromones in the map, corresponding to ants. The th ant is only affected by the th pheromone, and the pheromone will be updated after the ant walks through the grid. represents the pheromone weight. is the weight of the heuristic function.
is the heuristic function, representing the expected degree of ant transfer from grid to grid . Assuming that the ant is in the grid at time , and the ants are in the grid at time , the definition is as follows:
where ,. indicates the number of grids covered at time , indicates the number of grids covered at time . The difference represents the increased number of undetected grids transferred from grid to grid , which can make the ants move towards the unexplored grid.
Calculate the transition probability of the current grid and all grids in the feasible region in turn. Use the roulette method to choose which grid the ants will choose next. This helps to increase the randomness of the paths chosen by the ants and prevents the algorithm from falling into local optima.
4.2.4. Escape from Local Optimum
When the ants find that of all grids in the feasible region is zero, it means that the ants cannot explore new uncovered grids. The ants are trapped in the local optimum, and the heading is adjusted according to the following formula:
where represents all the selectable headings in the feasible region. is the target heading of the ants, which can be calculated by the following formula:
where is the closest uncovered grid to the current grid and represents the current coordinates of the ant.
4.2.5. Fitness Function
The fitness function is the number of grids covered by the P period after the ants walk. The calculation method is as follows:
In Section 3.2, the optimization objective is the coverage from 0 to 1, and directly using the coverage as the fitness function will lead to small calculation results. In order to reflect the different coverage effects of ants choosing different paths and accelerate the convergence speed of the algorithm, the number of grids covered by ants in P cycles after walking was taken as the fitness function, which was obtained by enlarging the optimization objective by M × N times. In fact, both functions are unified.
4.2.6. Pheromone Update Rule
Before iteration, there are initial pheromones on all paths. During each iteration, each ants walk as an ant unit with the same fitness. When ants all finish their pathfinding, the pheromones on the path are updated. In order to prevent the same group of ants from interfering with each other, we made some restrictions. The th ant will only affect the th pheromone.
In the algorithm, the dimension of the pheromone matrix is consistent with the dimension of the grid map, both are M × N. When the ant’s path contains the grid, the pheromone of the grid will be updated by pheromone update rules. For grids without ants passing by, the pheromone in them will evaporate over time, the evaporation rate controlled by the evaporation coefficient .
The pheromone update rule is as follows:
represents the th pheromone between grid and grid after the update at time , and represents the th pheromone between grid and grid before the update at time . is the volatility coefficient, is the pheromone left by the ants, and the calculation method is as follows:
where Q is a constant, is the fitness of the th ant. Too high or too low pheromone will increase the probability of falling into a local optimum. In order to avoid this situation, the pheromone is limited to a certain range . The optimized pheromone update rules are as follows:
4.3. Pseudocode of MGCPP-ACO
The pseudocode of MGCPP-ACO is given in Algorithm 1. Lines 1 to 2 correspond to the initialization of the algorithm. Lines 3 to 25 correspond to the main loop of the algorithm. At the end of the algorithm (line 26), it will return the optimal coverage path after iteration.
| Algorithm 1: MGCPP-ACO |
| 01: Model underwater environments and initialize pheromone amount |
| 02: Determine the initial positions and heading of ants and parameters of ACO |
| 03: while termination rule is not met do |
| 04: Mark all ants as alive and place them at starting points |
| 05: for g = 1 to |
| 06: for p = 1 to P |
| 07: for i = 1 to m |
| 08: if is alive |
| 09: Implement state transition rule to select next waypoint |
| 10: if feasible region is NULL |
| 11: Escape from local optimum |
| 12: end if |
| 13: else |
| 14: The fitness of anti = -Inf |
| 15: end if |
| 16: moves to next waypoint |
| 17: if collisions with the seabed |
| 18: Mark as dead |
| 19: end if |
| 20: end for |
| 21: end for |
| 22: Evaluate paths of all alive ants; |
| 23: end for |
| 24: Implement pheromone update rule to update pheromone |
| 25: end while |
| 26: Returns the final path of the iteration |
5. Simulation Experiment and Result Analysis
In this section, we show the path of the algorithm in the 2D plane and 3D space and analyze the adaptability of the algorithm to different initial positions and initial headings. Then, we compare the algorithm with the traditional scan-line algorithm and analyze the performance.
5.1. Simulation Environment
We use MATLAB for simulation; multiple UGs will perform coverage tasks in 15 km × 15 km, and we use the actual seabed topography as the depth constraint. The UG simulation parameters are shown in Table 2 [20].
Table 2.
Simulation Parameters.
5.2. Analysis of MGCPP-ACO Algorithm
In Scenario 1, we carried out several simulation experiments to demonstrate that the proposed algorithm adapts to the different initial positions and headings angles. The three UGs glide fixedly for 12 periods. Table 3 shows the initial coordinates and heading angle, and Figure 7 show the coverage effect under different parameters.
Table 3.
Initial positions and heading angles.
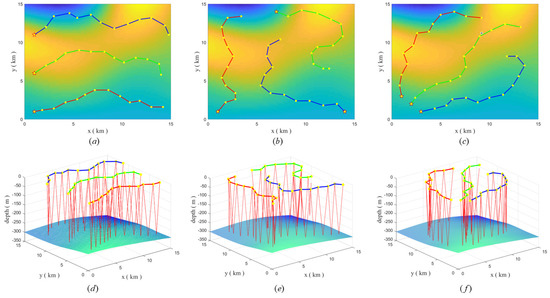
Figure 7.
The MGCPP−ACO algorithm path planning results in scenario 1 (where (a–c) are 2D plane trajectories, and (d–f) are 3D space trajectories).
As shown in Table 3, the proposed algorithm achieves high coverage for different initial positions and initial heading angles.
Figure 7a–c show that the UGs keep going to the undetected area and avoid colliding with each other. This is due to the setting of the heuristic function, since the number of new uncovered grids is reduced by the close distance. The pheromone mechanism of the ant colony maintains the global optimality of the algorithm and allows the algorithm to have a high area coverage.
In addition, the algorithm makes full use of the detection effectiveness of the region. The UGs glider to locations with larger detection radius to improve the area coverage.
Figure 7d–f show that the 3D trajectories of the UGs are not the same for each glide, because the algorithm adaptively adjusts the glide angle and depth to avoid collision with the seafloor, and adjusts the water exit point to reach the place with better detection effectiveness.
In addition, to demonstrate the adaptability of the algorithm under different detection radius maps, we additionally conduct two group of experiments whose detection radius maps are not the same.
Figure 8 shows the detection radius map and simulation results under scenario 2. Figure 9 shows the detection radius map and simulation results under scenario 3. The simulation results and the coverage rate in Table 3 show that the algorithm still has high adaptability to different detection radius maps.
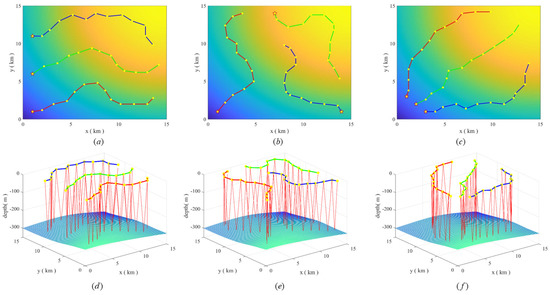
Figure 8.
The MGCPP−ACO algorithm path planning results in scenario 2 (where (a–c) are 2D plane trajectories, and (d–f) are 3D space trajectories).
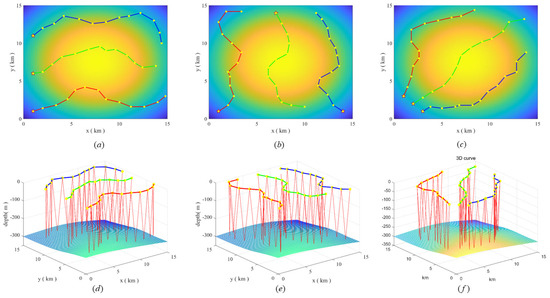
Figure 9.
The MGCPP−ACO algorithm path planning results in scenario 3 (where (a–c) are 2D plane trajectories, and (d–f) are 3D space trajectories).
5.3. Performance Comparison
5.3.1. Scanline Covering (SCAN) Algorithm
The scan-line (SCAN) algorithm proved to be simple and effective when covering rectangular areas [21]. The coverage path consists of straight lines and 90° turns, and the two parallel lines are separated by twice the detection radius to minimize overlapping coverage [22].
We decompose the entire area into rectangular areas equal to the number of UGs, where each glider covers an area correspondingly. They all use the SCAN algorithm to cover sub-regions.
The UG uses the most energy-efficient gliding angle for sailing while avoiding hitting the seabed. Because of the different gliding parameters each time, the horizontal distance of gliding is also different. There is a different detection radius at different locations, so we use twice the average detection radius of the entire sea area as the interval between parallel lines. The UG will automatically calculate the glide period according to the interval. Figure 10 shows the motion trajectories of the SCAN algorithm in 2D space and 3D space, respectively.
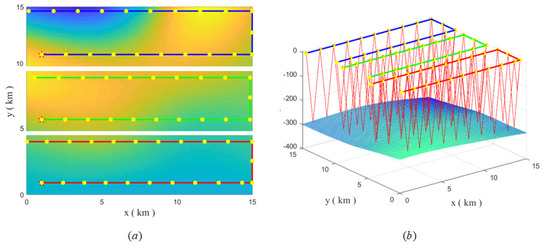
Figure 10.
(a) The 2D plane trajectory of SCAN algorithm, (b) 3D space trajectory of SCAN algorithm.
5.3.2. Comparison and Analysis
Next, we compare the proposed algorithm with the SCAN algorithm. The initial headings and initial positions of the three UGs are the same as those of simulation No.1 in Table 3. The simulation requires to reach 95% area coverage rate; otherwise, continue to increase the glide period.
Coverage rate and coverage requirements , are used to evaluate both algorithms. can be calculated by Equation (14), which represents the detection coverage of the area after a fixed glide P period. is the number of periods required to glide when the same coverage is required, and is the time required to glide when the same coverage is required.
Figure 11a shows the coverage rate of the two algorithms. When sailing for the same number of periods, the MGCPP-ACO algorithm has higher coverage than the SCAN algorithm and completes the task earlier (the 12th period), while the SCAN algorithm takes 20 periods to complete the task. The coverage efficiency of the MGCPP-ACO algorithm is also significantly better than that of the SCAN algorithm. This is due to the setting of the heuristic function, which makes the glider tend to go to the uncovered grid, so the MGCPP-ACO coverage is more efficient.
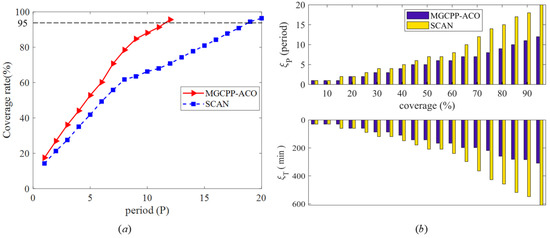
Figure 11.
(a) of the two algorithms, (b) and of the two algorithms.
Figure 11b shows the coverage requirements of the two algorithms, that is, the number of periods and time required to achieve the same coverage. The requirements of the MGCPP-ACO algorithm are significantly smaller than those of the SCAN algorithm. This shows that the algorithm proposed in this paper is less expensive and can complete the coverage task in fewer periods and time.
6. Conclusions
In this paper, we innovatively propose the MGCPP-ACO algorithm to solve the multi-UGs coverage problem. First, fully considering the influence of the kinematic constraints of the UG and the complex ocean environment on the sonar detection radius, we built the UG detection model. Then, for the multi-glider coverage planning problem, the basic ACO is improved to obtain higher coverage efficiency. Finally, the improved ACO algorithm is used to compare with the SCAN algorithm. The simulation shows that the MGCPP-ACO algorithm has higher coverage efficiency and lower coverage cost. In the future, we will consider the impact of ocean currents on multi-UGs coverage path planning.
Author Contributions
Software, H.J.; writing—original draft preparation, H.J.; writing—review and editing, H.H.; supervision, X.P.; project administration, X.P.; funding acquisition, X.P. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National Natural Science Foundation of China under Grants 62076203.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wu, H.; Niu, W.; Wang, S.; Yan, S. An analysis method and a compensation strategy of motion accuracy for UG considering uncertain current. Ocean. Eng. 2021, 226, 108877. [Google Scholar] [CrossRef]
- Takeshita, Y.; Jones, B.D.; Johnson, K.S.; Chavez, F.P.; Rudnick, D.L.; Blum, M.; Conner, K.; Jensen, S.; Long, J.S.; Maughan, T. Accurate pH and O2 measurements from spray UGs. J. Atmos. Ocean. Technol. 2021, 38, 181–195. [Google Scholar] [CrossRef]
- Zhang, F.; Ennasr, O.; Litchman, E.; Tan, X. Autonomous sampling of water columns using gliding robotic fish: Algorithms and harmful-algae-sampling experiments. IEEE Syst. J. 2015, 10, 1271–1281. [Google Scholar] [CrossRef]
- Zhou, M.; Bachmayer, R.; de Young, B. Working towards seafloor and underwater iceberg mapping with a Slocum glider. In Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, MS, USA, 6–9 October 2014; pp. 1–5. [Google Scholar]
- Wang, C.; Yuan, M. Application study of a new UG with single vector hydrophone for target direction finding. IEEE Access 2021, 9, 34156–34164. [Google Scholar] [CrossRef]
- Guastella, D.C.; Cantelli, L.; Giammello, G.; Melita, C.D.; Spatino, G.; Muscato, G. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments. Comput. Electr. Eng. 2019, 75, 189–201. [Google Scholar] [CrossRef]
- Perez-Imaz, H.I.; Rezeck, P.A.; Macharet, D.G.; Campos, M.F. Multi-robot 3D coverage path planning for First Responders teams. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 1374–1379. [Google Scholar]
- Adaldo, A.; Mansouri, S.S.; Kanellakis, C.; Dimarogonas, D.V.; Johansson, K.H.; Nikolakopoulos, G. Cooperative coverage for surveillance of 3D structures. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1838–1845. [Google Scholar]
- Han, G.; Zhou, Z.; Zhang, T.; Wang, H.; Liu, L.; Peng, Y.; Guizani, M. Ant-colony-based complete-coverage path-planning algorithm for UGs in ocean areas with thermoclines. IEEE Trans. Veh. Technol. 2020, 69, 8959–8971. [Google Scholar] [CrossRef]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Kosmatopoulos, E.B. DARP: Divide areas algorithm for optimal multi-robot coverage path planning. J. Intell. Robot. Syst. 2017, 86, 663–680. [Google Scholar] [CrossRef]
- Nedjati, A.; Izbirak, G.; Vizvari, B.; Arkat, J. Complete coverage path planning for a multi-UAV response system in post-earthquake assessment. Robotics 2016, 5, 26. [Google Scholar] [CrossRef]
- Huang, X.; Sun, M.; Zhou, H.; Liu, S. A multi-robot coverage path planning algorithm for the environment with multiple land cover types. IEEE Access 2020, 8, 198101–198117. [Google Scholar] [CrossRef]
- Glegg, S.A.L.; Olivieri, M.P.; Coulson, R.K.; Smith, S.M. A passive sonar system based on an autonomous underwater vehicle. IEEE J. Ocean. Eng. 2001, 26, 700–710. [Google Scholar] [CrossRef]
- Guo, Y.; Ai, R.; Chen, Y.; Qi, Y. Prediction of Passive Sonar Detection Range in Different Detection Probability. In Proceedings of the 2018 5th International Conference on Systems and Informatics (ICSAI), Nanjing, China, 10–12 November 2018; pp. 1289–1293. [Google Scholar]
- Rudnick, D.L.; Davis, R.E.; Eriksen, C.C.; Fratantoni, D.M.; Perry, M.J. Underwater gliders for ocean research. Mar. Technol. Soc. J. 2004, 38, 73–84. [Google Scholar] [CrossRef]
- Kepper, J.H.; Claus, B.C.; Kinsey, J.C. A navigation solution using a MEMS IMU, model-based dead-reckoning, and one-way-travel-time acoustic range measurements for autonomous underwater vehicles. IEEE J. Ocean. Eng. 2018, 44, 664–682. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments. Sensors 2020, 20, 1880. [Google Scholar] [CrossRef]
- Kierstead, D.P.; DelBalzo, D.R. A genetic algorithm applied to planning search paths in complicated environments. Mil. Oper. Res. 2003, 8, 45–59. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Stützle, T.; López-Ibáñez, M.; Pellegrini, P.; Maur, M.; de Oca, M.M.; Birattari, M.; Dorigo, M. Parameter adaptation in ant colony optimization. In Autonomous Search; Springer: Berlin/Heidelberg, Germany, 2011; pp. 191–215. [Google Scholar]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Artemenko, O.; Dominic, O.J.; Andryeyev, O.; Mitschele-Thiel, A. Energy-aware trajectory planning for the localization of mobile devices using an unmanned aerial vehicle. In Proceedings of the 2016 25th International Conference on Computer Communication and Networks (ICCCN), Waikoloa, HI, USA, 1–4 August 2016; pp. 1–9. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).