
Decentralized Electric Vehicle Charging Strategies for Reduced Load Variation and Guaranteed Charge Completion in Regional Distribution Grids


Abstract
:1. Introduction
- Centralized control: A common feature of these strategies is a centralized control system that bi-directionally communicates with all EVs and manages charging time and power to optimize certain objective functions, such as minimizing carbon dioxide emissions [11], minimum power loss, minimum cost, or “valley-filling”, by using EV data (the connection time to the grid, charge demand, rated voltage, and charger power) [12,13,14,15]. Such control strategies require extensive real-time bi-directional communications, with increased costs on communications equipment and resources and, consequently, they are not desirable to charging service providers. Commonly used algorithms in centralized control, including linear programming, quadratic programming, dynamic programming, stochastic programing, robust optimization, model predictive control, etc., are summarized and presented in [16,17]. A new stochastic model with several uncertainty sources is proposed in [18] to minimize the expected operational cost of the energy aggregator based on stochastic programming, and this method needs a central control center to communicate with the local controllers of DERs, and is required to allow the broadcast of the electricity market prices for the next 24 h.
- Distributed control: Typically, in these distributed methods, a central control system broadcasts a common electricity price or a reference power signal to all EVs. Then each EV decides individually, and locally, its charging power and time, based on its own parameters and associated optimization criteria [10,19]. To some extent, these strategies can achieve asymptotically the optimization targets with reduced data computations. However, the central control system still communicates with EVs either uni-directionally or bi-directionally. A pricing mechanism based on time and power scales is proposed in [20], where the electricity price is used as a common reference signal with only uni-directional data transmission. The impact of EV charging loads on Swiss distribution substations under different penetration levels and pricing regimes was studied in [21], and states that the introduction of dynamic electricity prices can further increase the risk of substation overloads compared to a flat electricity tariff. However, to achieve good control performance, it must construct real-time curves of electricity pricing that vary with load power during different time intervals, leading to increased control implementation complexity, costs, and potentially decreased charging efficiency [10]. Katarina and Mattia [22] propose a voltage-dependent EV reactive power control for grid support to raise the minimum phase-to-neutral voltage magnitudes and to improve voltage dispersion. However, it needs local voltage measurements. Another local control technique is also proposed in [23] whereby individual electric vehicle charging units attempt to maximize their own charging rate along with the information about the instantaneous voltage of their own point and loading of the service cable.
2. Charging Station Models
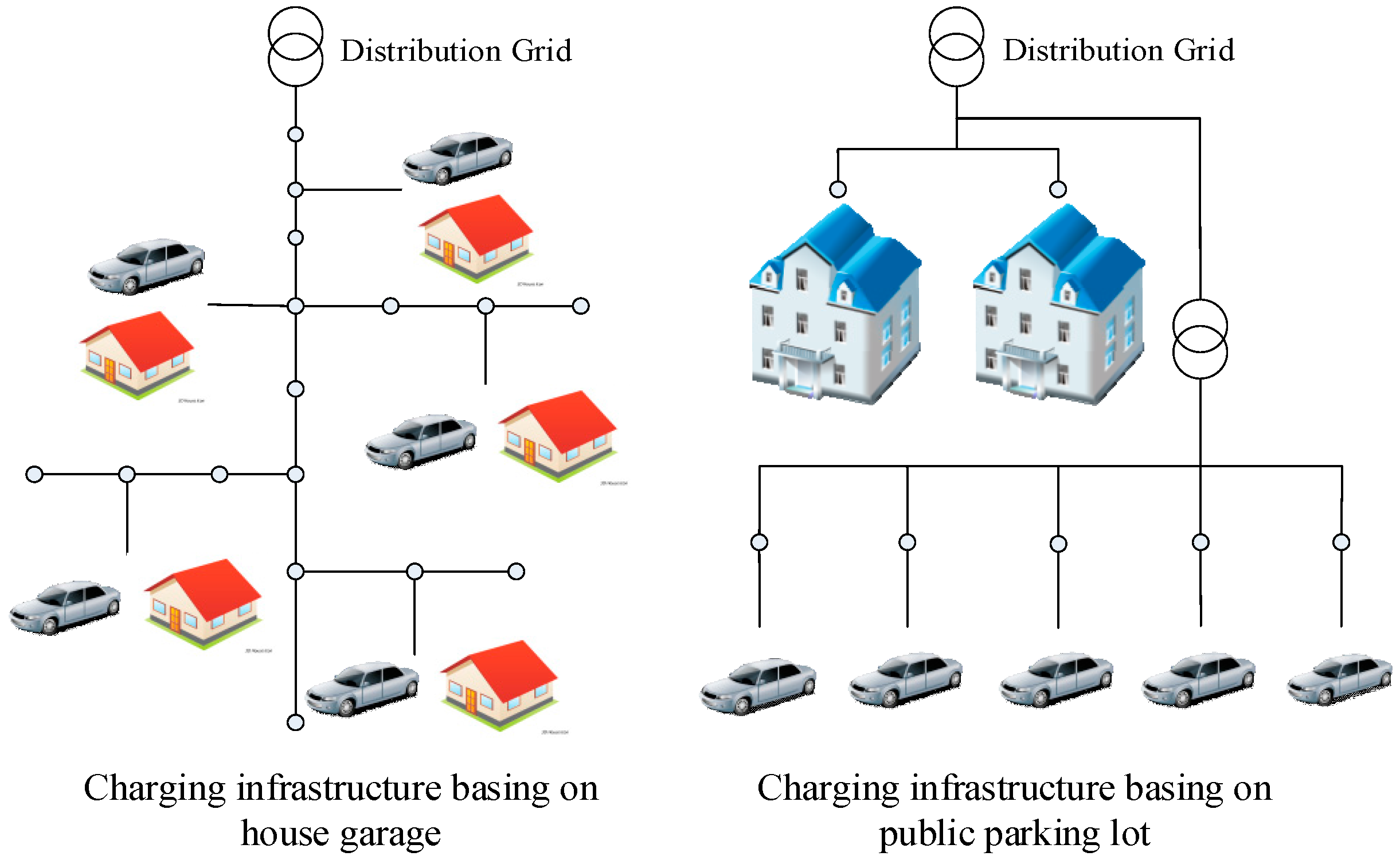
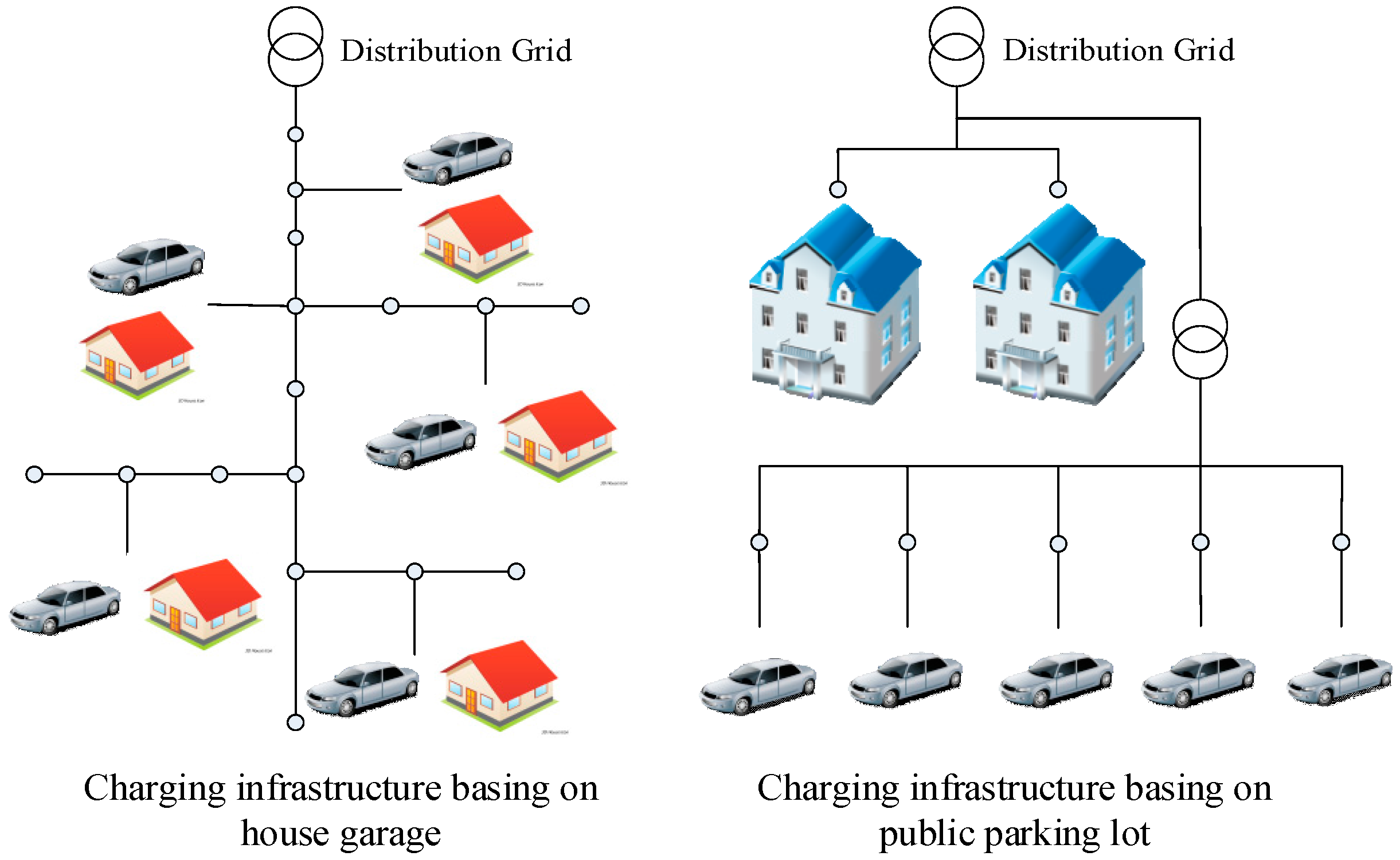
2.1. Regional Distribution Grid Models
2.2. Models of EV Returning-Time and Charging Demand
- (1)
- The returning time and charging demand of each EV are mutually independent.
- (2)
- The returning times of all the vehicles are independent and identically distributed (i.i.d.) with density function fs.
- (3)
- The charging demands of all the vehicles are i.i.d. with density function fD.
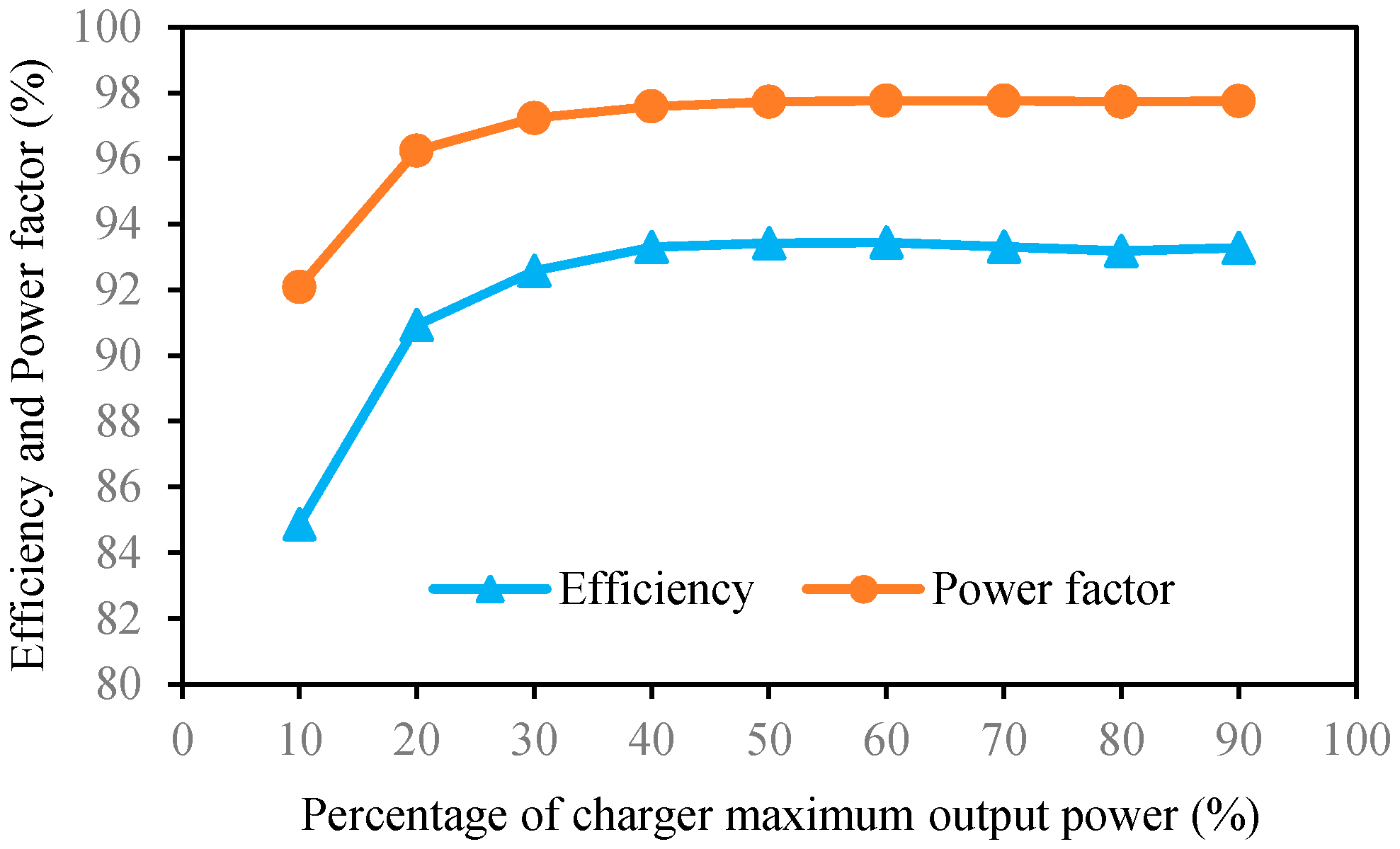
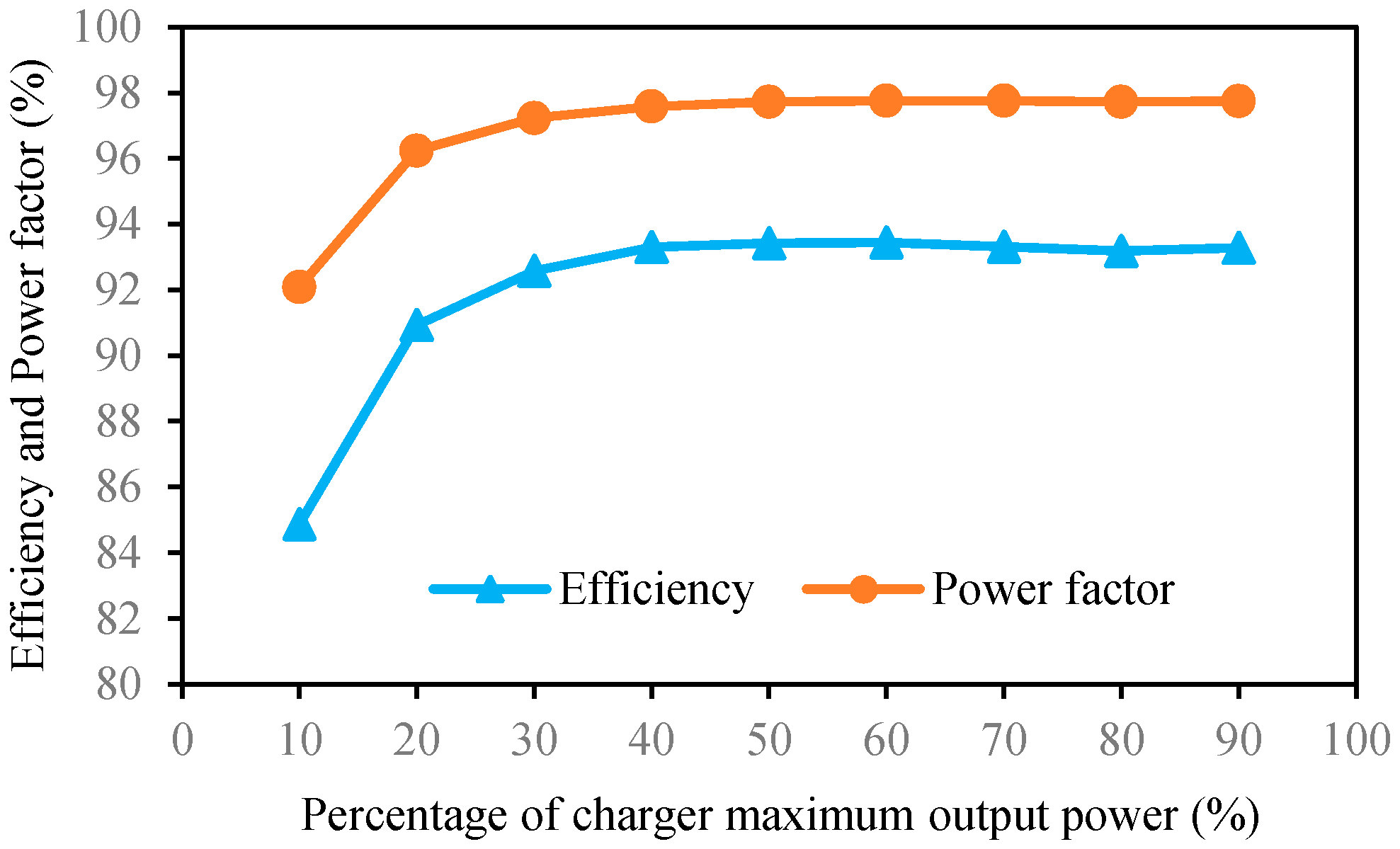
2.3. Efficiency Analysis of On-Board Chargers
3. Autonomous Stochastic Charging Control Strategy (ASCCS)
3.1. Basic Control Strategy
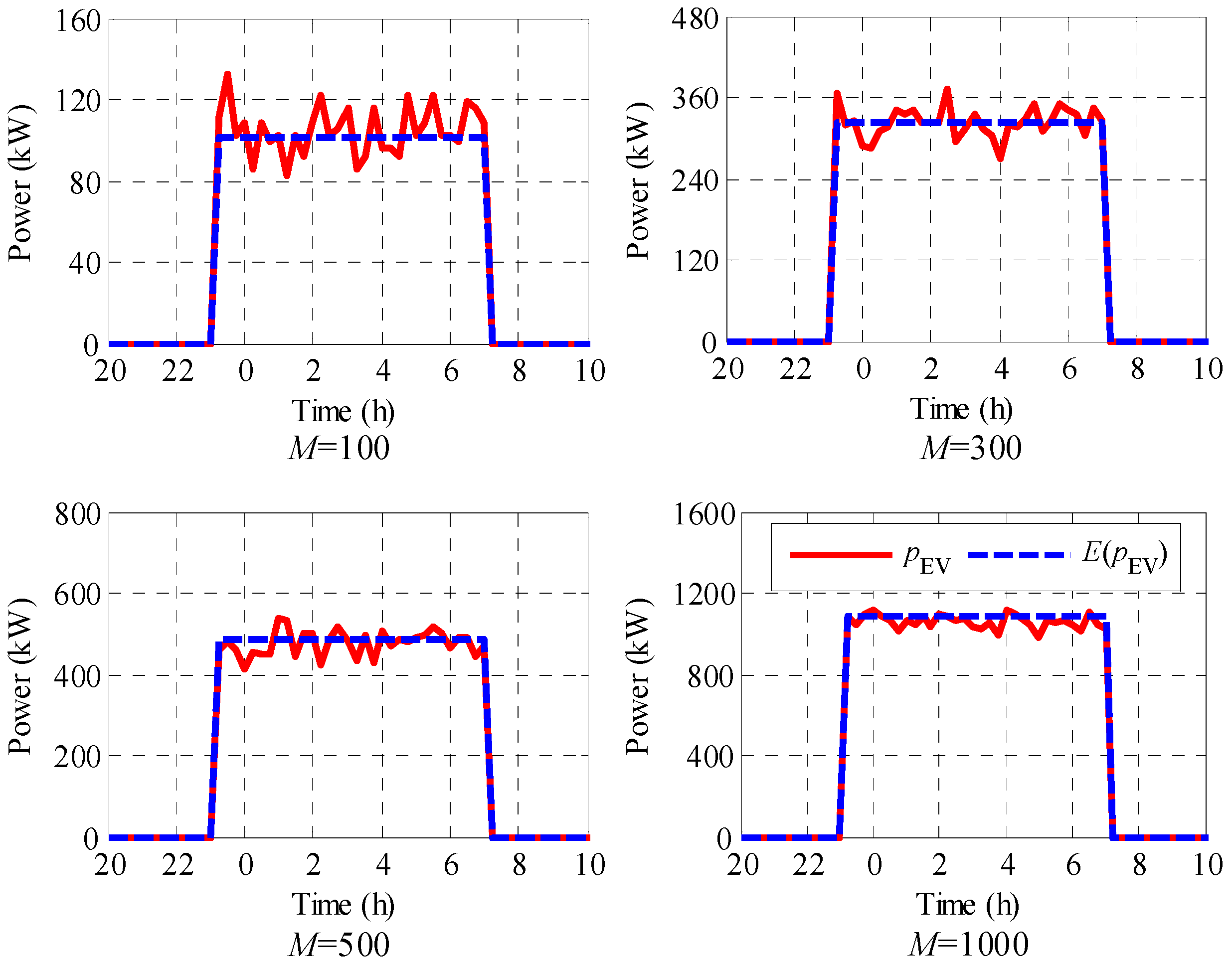
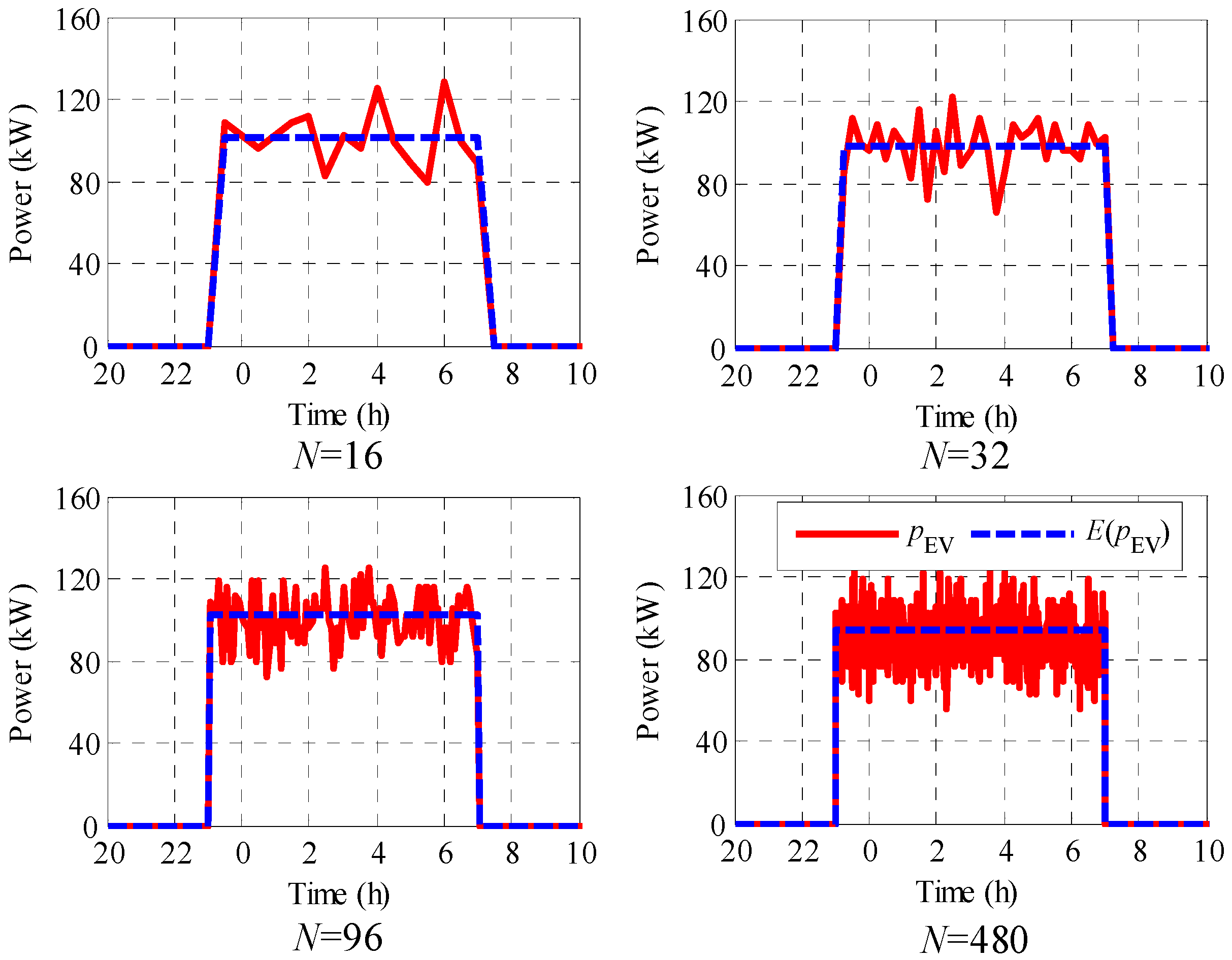
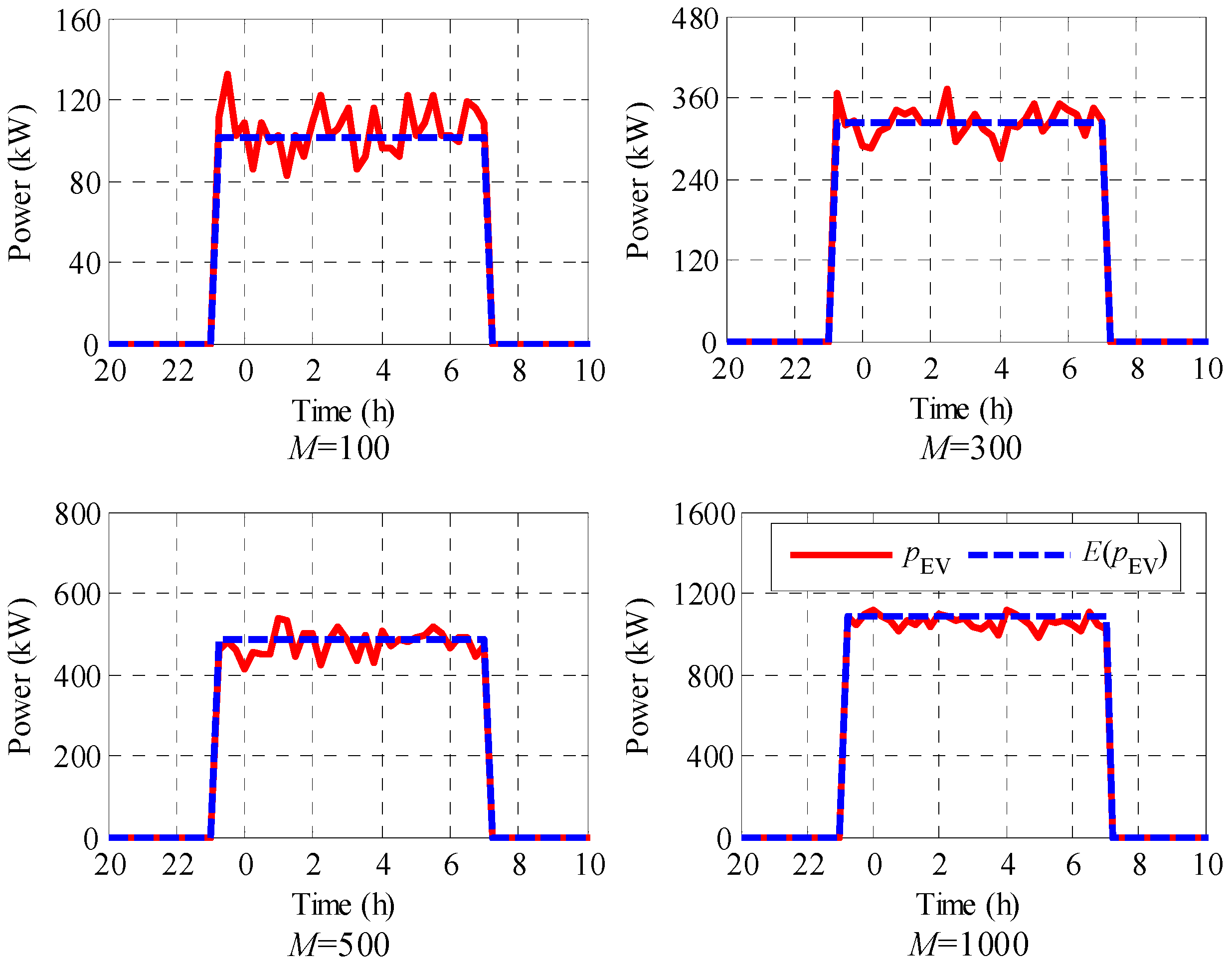
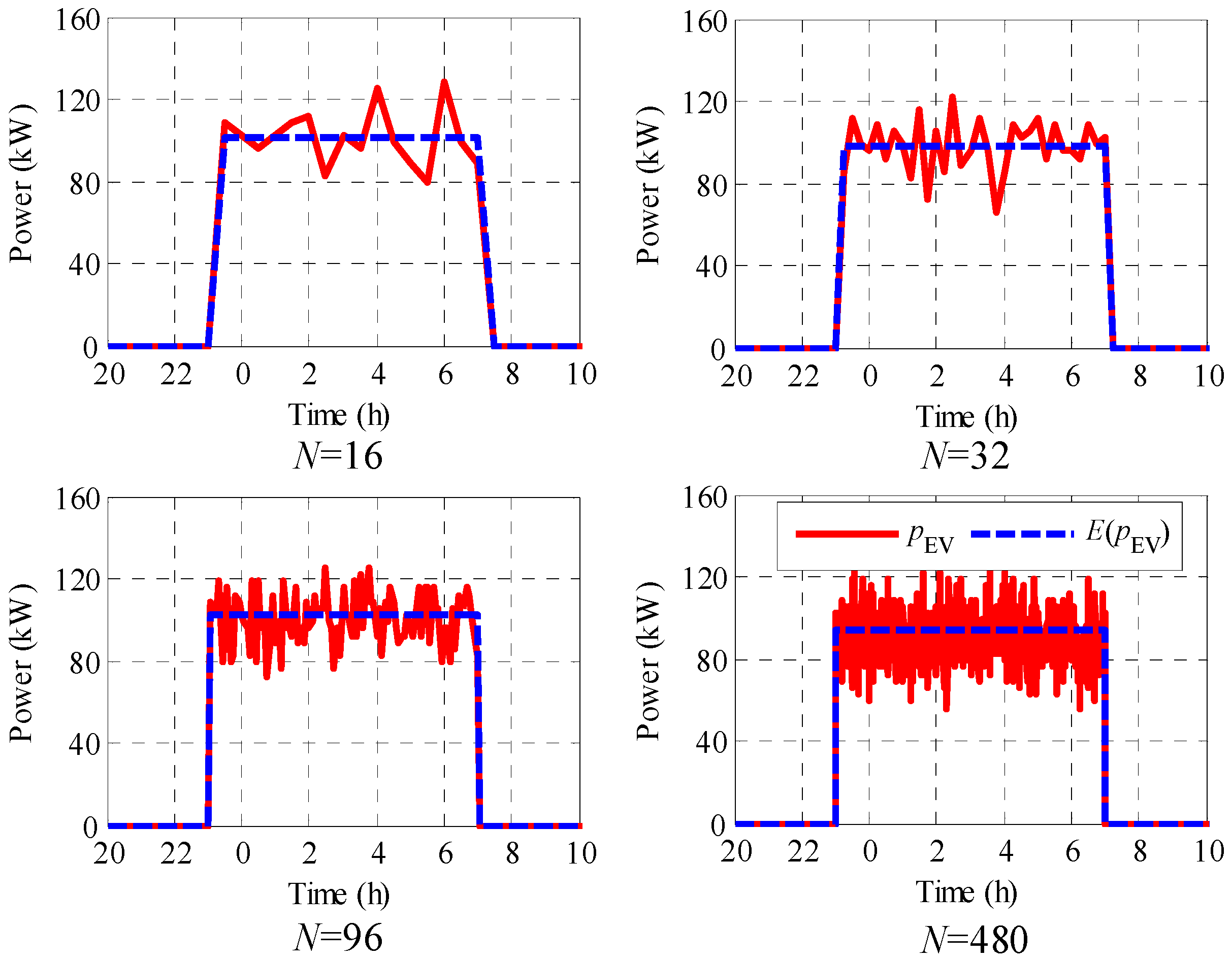
3.2. Power Variation Analysis
3.3. Charge Completion Analysis
4. Implementation and Improvements of ASCCS
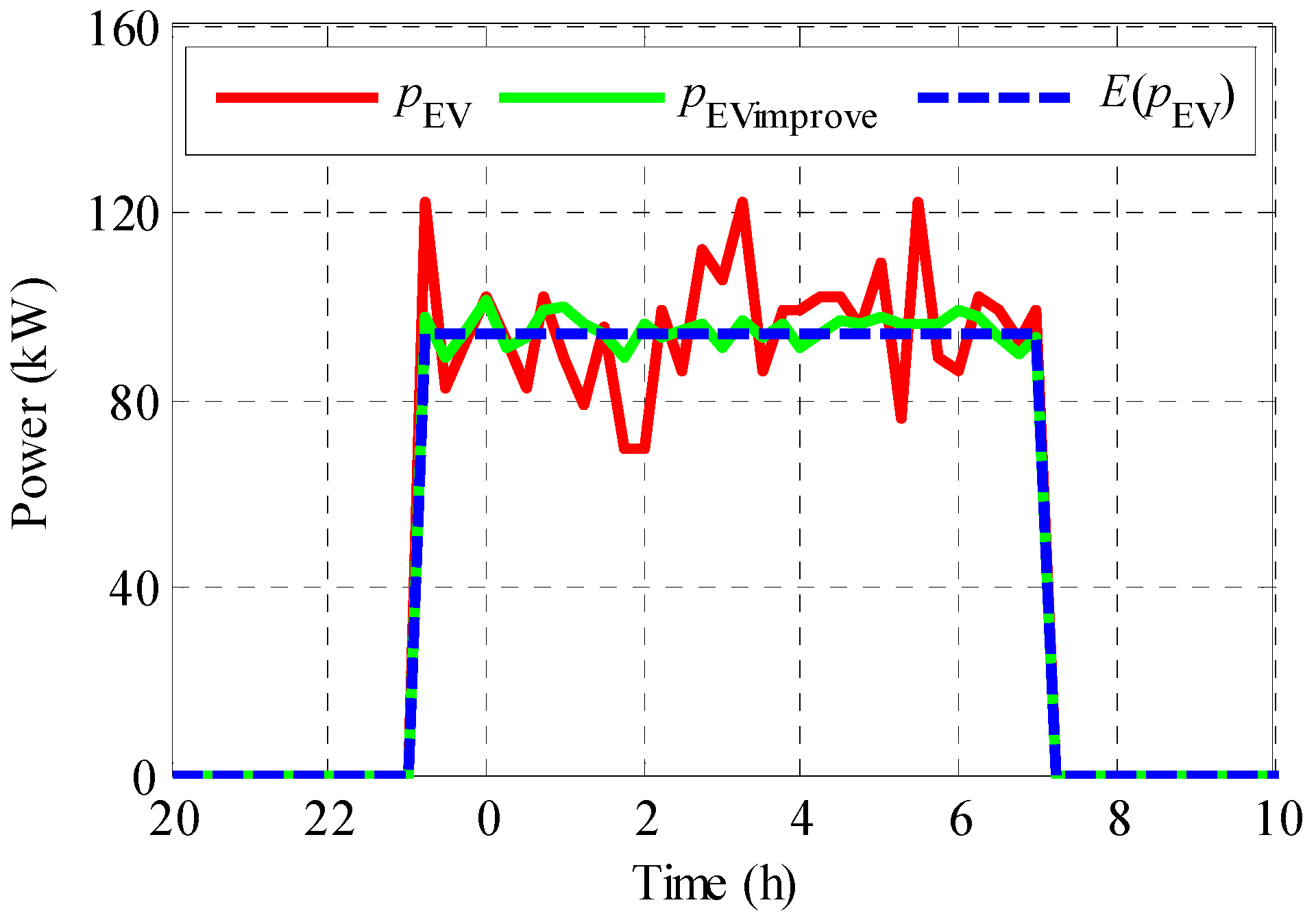
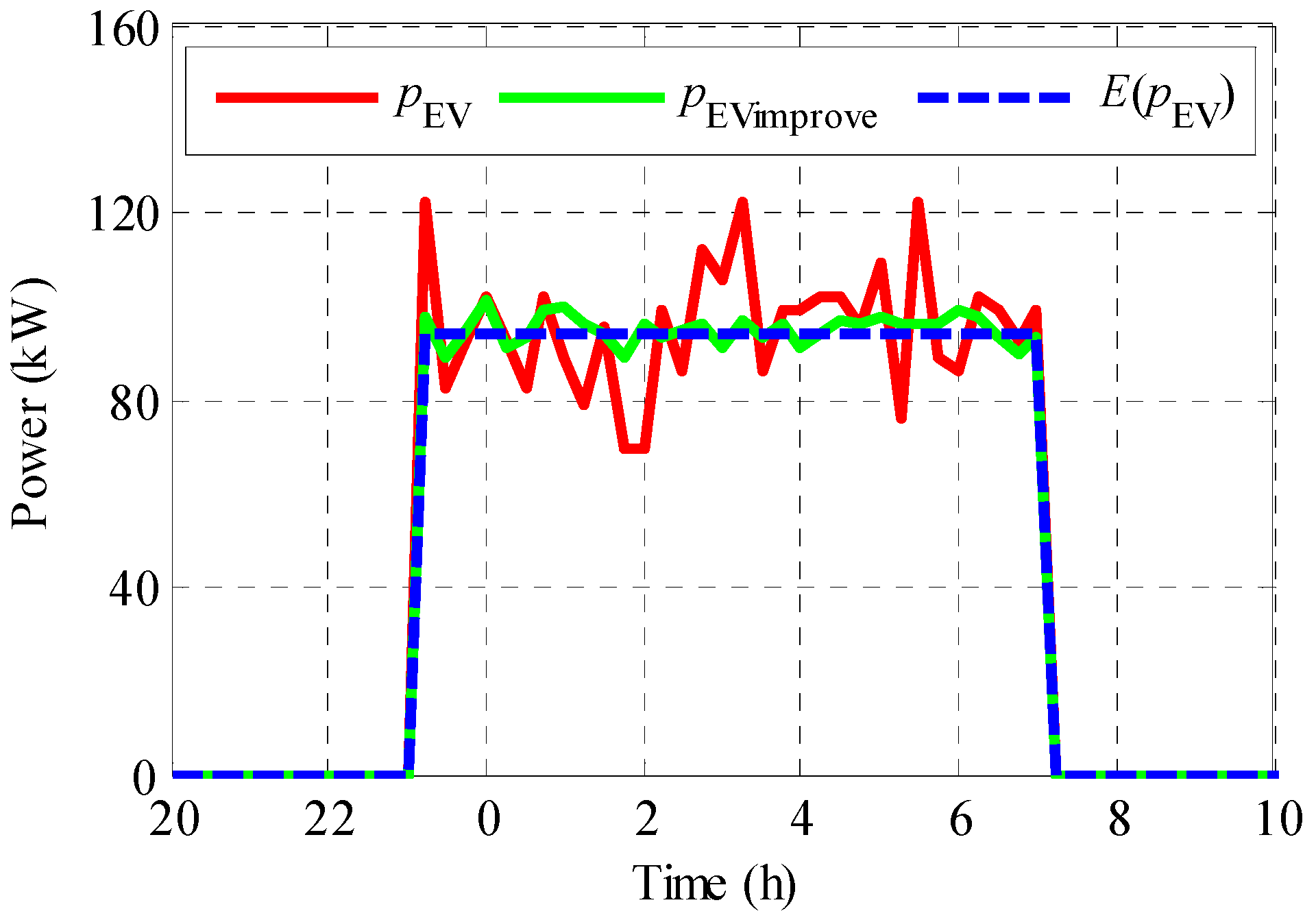
4.1. Individualized Power Management for Reducing Power Variations
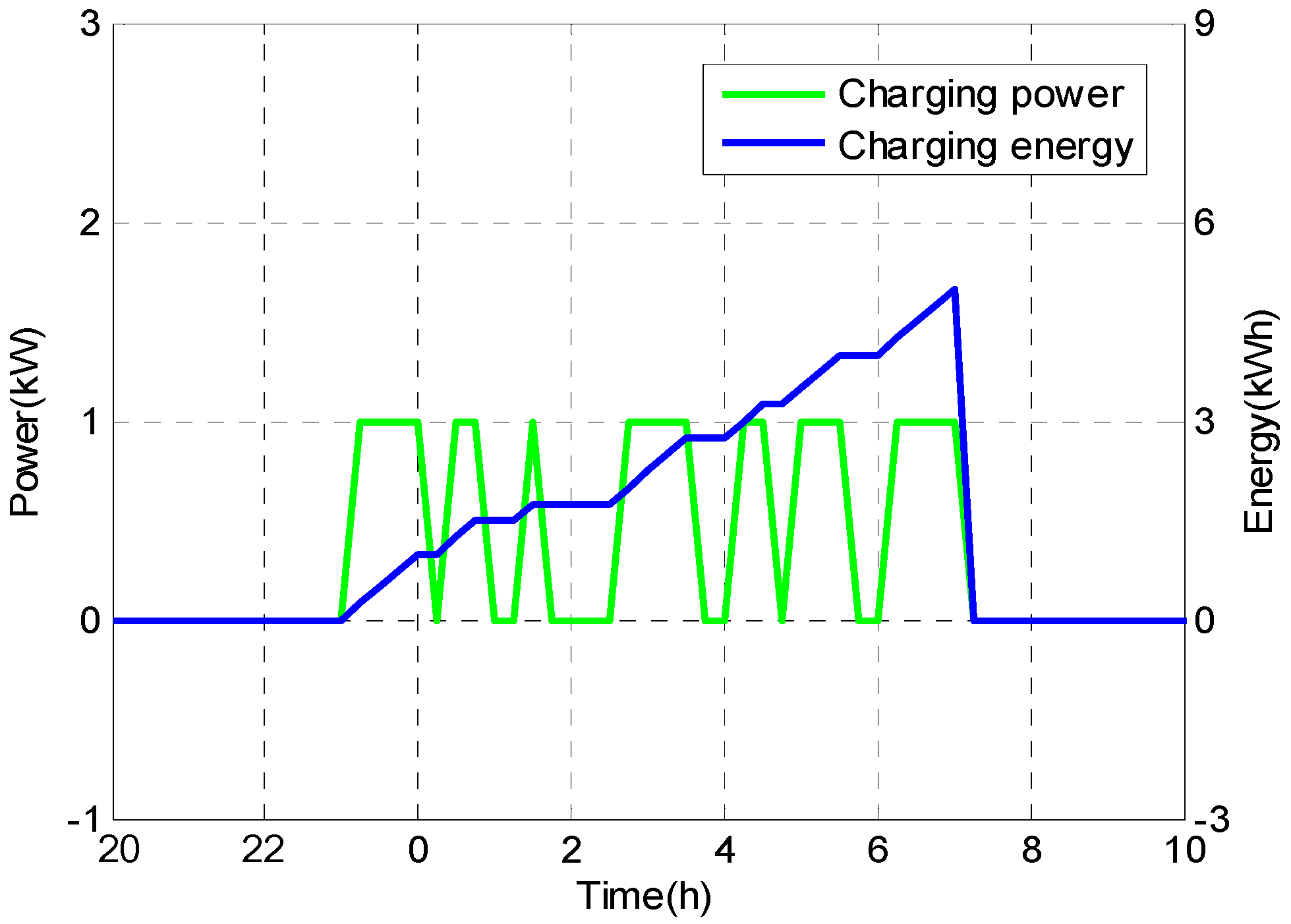
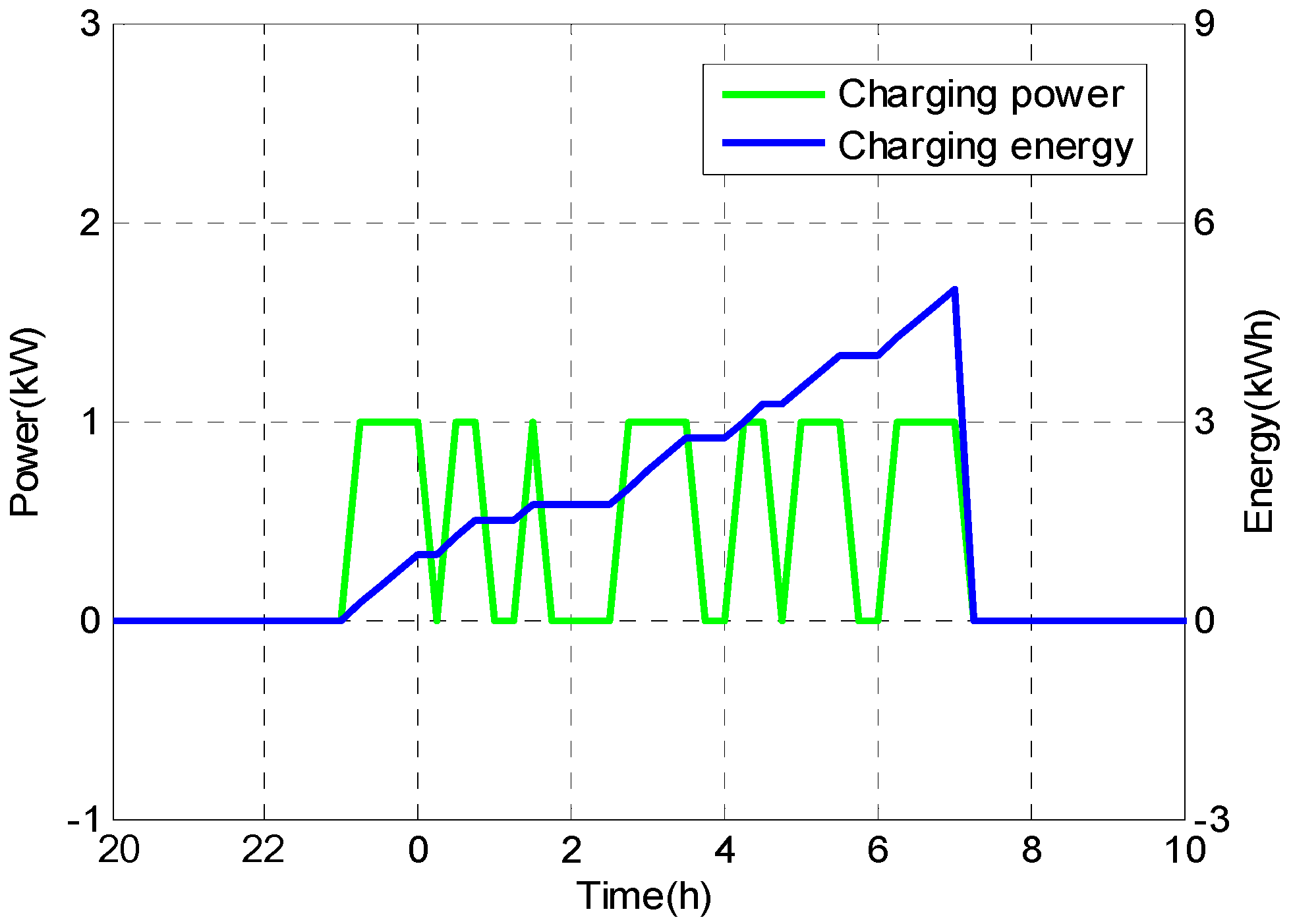
4.2. Adaptive Charging Control for Improving Charge Completion
- (a)
- If at any , , namely, the EV is fully charged, then . Hence, overcharging is avoided.
- (b)
- If at any , , namely, the remaining charging demand is equal to the remaining available blocks, then . Hence, incomplete charging is avoided.
- (c)
- Otherwise, this strategy ensures that is the optimal average power for completing the charge over the remaining blocks based on Theorem 3. Indeed, if we view the remaining charge demand at k as and the remaining time as , then , which is consistent with the optimal strategy in Theorem 3.
- (1)
- Assume that . Noticing that is monotonically increasing over k and , it follows that there must exist for some by the assumption . However, we havewhich derives that for any . This contradicts the assumption .
- (2)
- Assume . Thus, we have . In the case that , we haveNamely , which contradicts the assumption . It can be shown thatby the charging probability formulas given before. In the case that , we havewhich contradicts . Therefore, we prove that . ☐
4.3. Simulation on Improved ASCCS
5. Grid-Support Battery Storage for Reducing Power Variations
5.1. Analysis
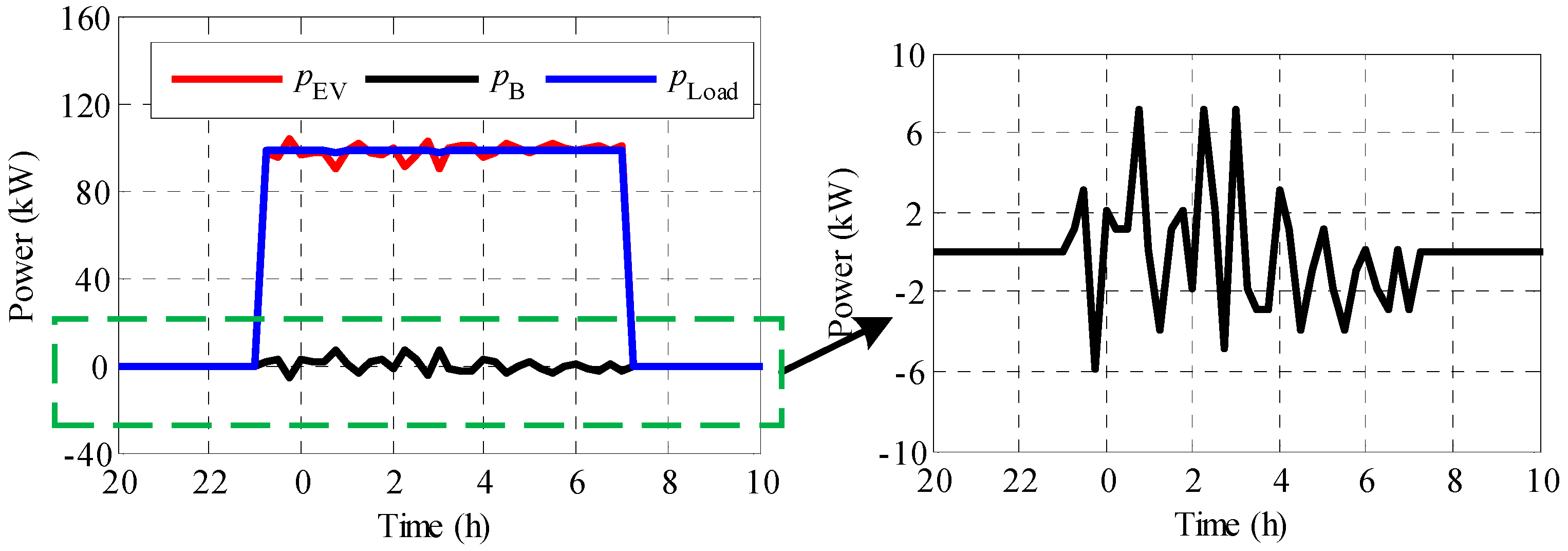
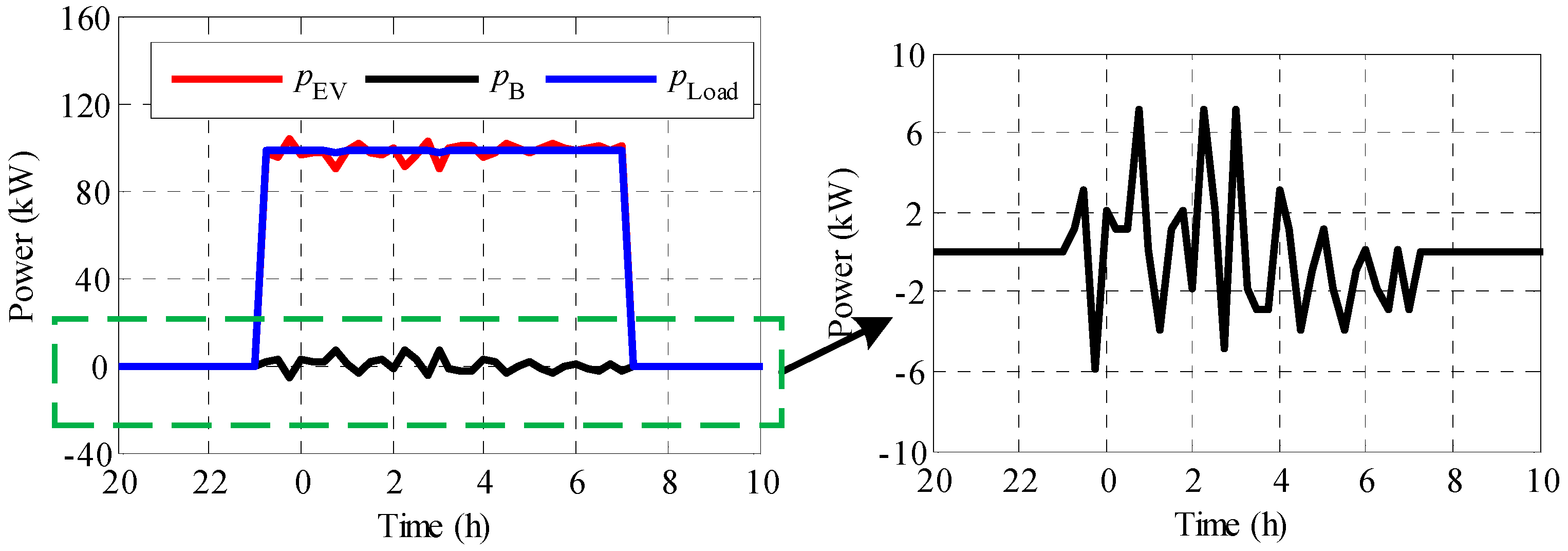
5.2. A Case Study
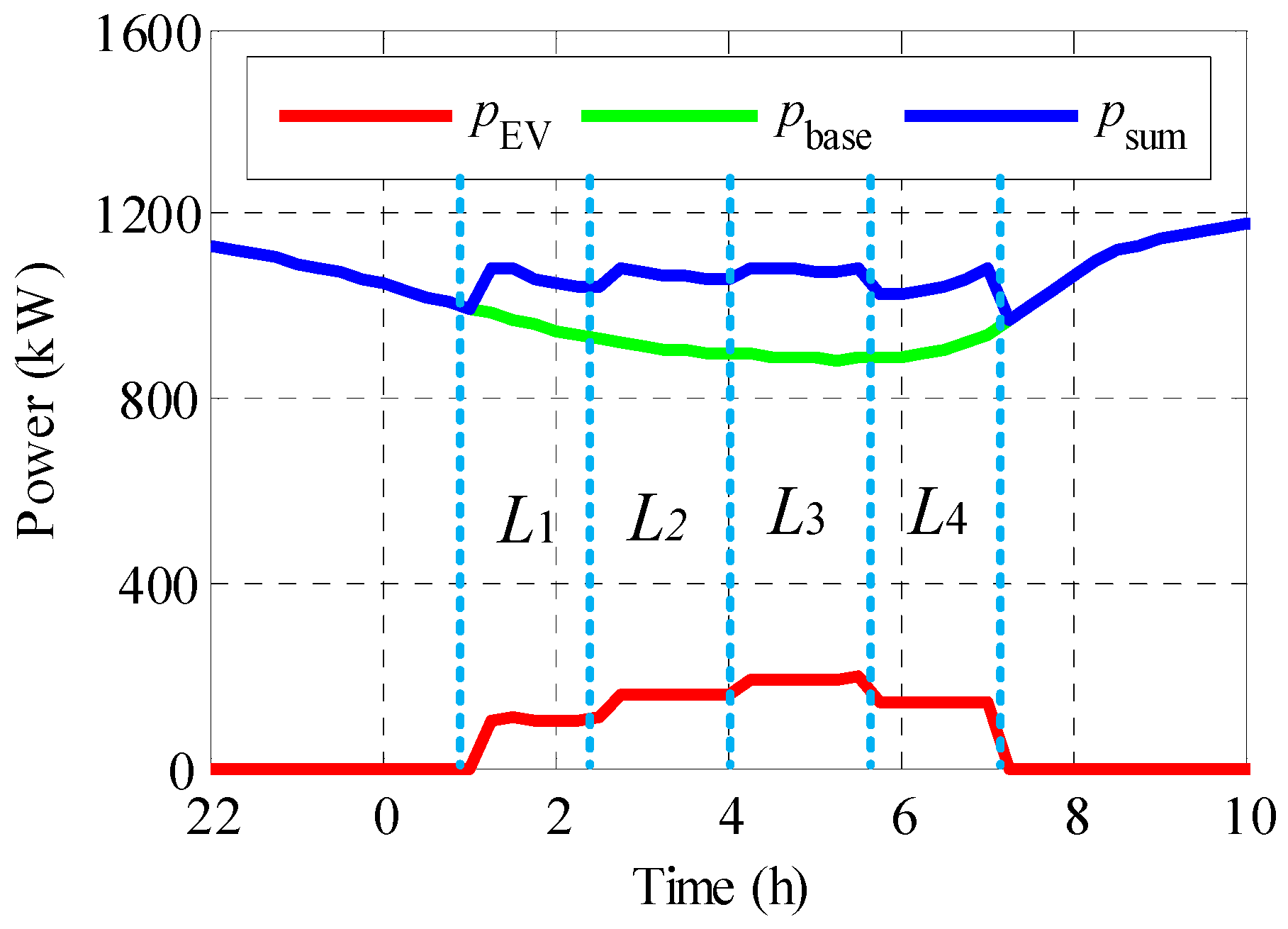
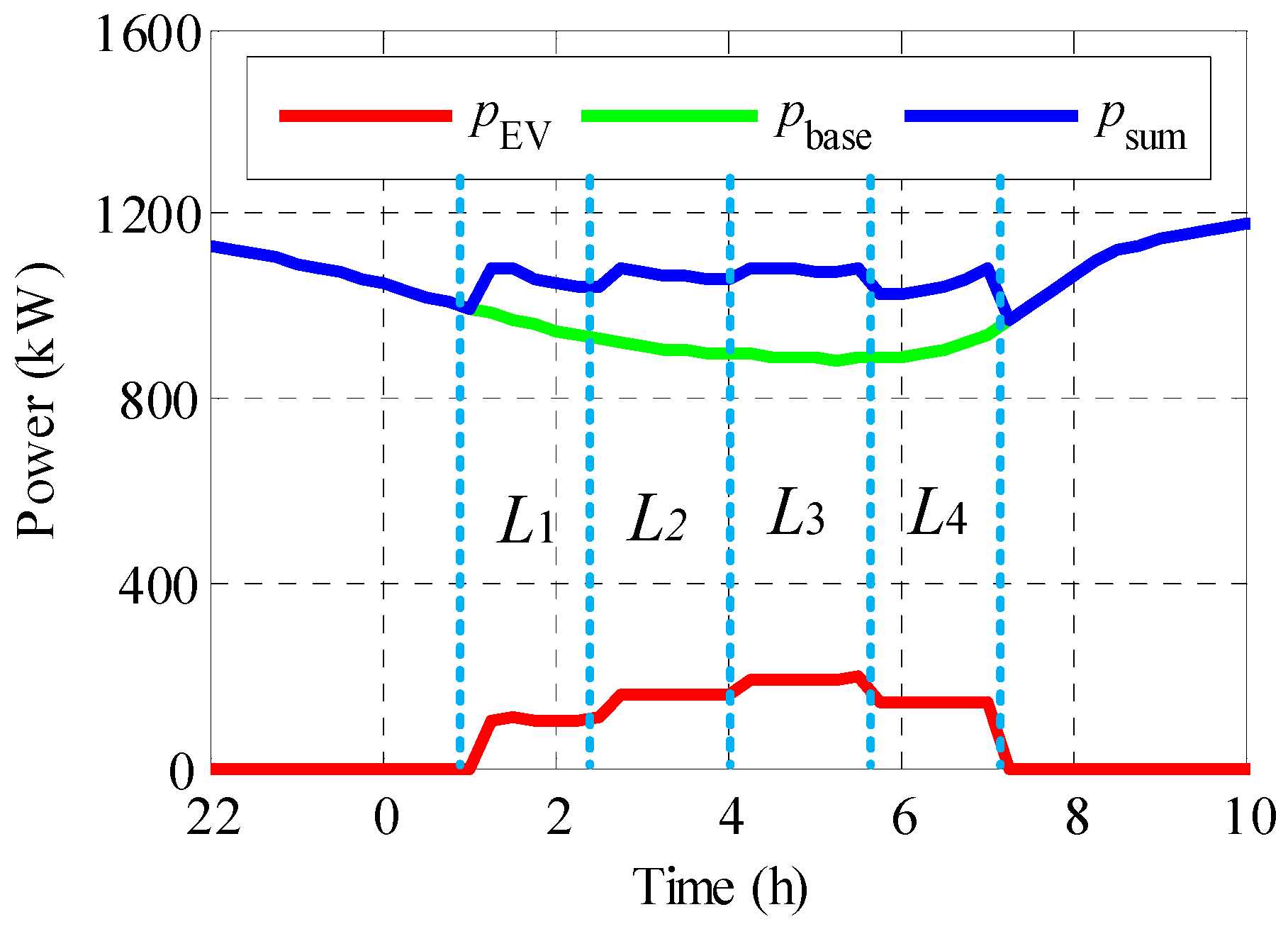
6. Application of the ASCCS Method in Valley-Filling Problems with a Conventional Load
- (a)
- Based on the information on the regular loads and daily EV load demand C, the grid scheduler assigns a time interval to be the interval of the valley-filling operation.
- (b)
- is divided into N time blocks, which are then grouped into L phases of K = N / L blocks each (for simplicity, let K be an integer). The new charging duration in each phase is
- (c)
- For the ith EV, its daily charge demand is distributed to each phase as such that .
- (d)
- Within each phase, the adaptive ASCCS algorithm, described in Section 4.2, is applied, which reduces load fluctuations among the time blocks in each phase and guarantees that the charge demand will be completed at the end of each phase.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, Z.; Wu, Q.; Nielsen, A.H.; Wang, Y. Day-ahead energy planning with 100% electric vehicle penetration in the Nordic region by 2050. Energies 2014, 7, 1733–1749. [Google Scholar] [CrossRef] [Green Version]
- Alonso, M.; Amaris, H.; Germain, J.G.; Galan, G.M. Optimal charging scheduling of electric vehicles in smart grids by heuristic algorithms. Energies 2014, 7, 2449–2475. [Google Scholar] [CrossRef]
- Lindgren, J.; Niemi, R.; Lund, P.D. Effectiveness of smart charging of electric vehicles under power limitations. Int. J. Energy Res. 2014, 38, 404–414. [Google Scholar] [CrossRef]
- Liu, J. Electric vehicle charging infrastructure assignment and power grid impacts assessment in Beijing. Energy Policy 2012, 51, 544–557. [Google Scholar] [CrossRef]
- Green, R.C.; Wang, L.F.; Alam, M. The impact of plug-in hybrid electric vehicles on distribution networks: A review and outlook. Renew. Sustain. Energy Rev. 2011, 15, 544–553. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Brown, T.; Samuelsen, G.S. Fuel reduction and electricity consumption impact of different charging scenarios for plug-in hybrid electric vehicles. J. Power Sources 2011, 196, 6559–6566. [Google Scholar] [CrossRef]
- Foley, A.; Tyther, B.; Calnan, P.; Gallachóir, B.Ó. Impacts of electric vehicle charging under electricity market operations. Appl. Energy 2013, 101, 93–102. [Google Scholar] [CrossRef]
- Zhang, Q.; Mclellan, B.C.; Tezuka, T.; Ishihara, K.N. A methodology for economic and environmental analysis of electric vehicles with different operational conditions. Energy 2013, 61, 118–127. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Soares, J.; Borges, N.; Vale, Z.; Oliveira, P.B.M. Enhanced Multi-Objective Energy Optimization by a Signaling Method. Energies 2016, 9, 807. [Google Scholar] [CrossRef]
- Abdelaziz, M.M.A.; Shaaban, M.F.; Farag, H.E.; El-Saadany, E.F. A multistage centralized control scheme for islanded microgrids with PEVs. IEEE Trans. Sustain. Energy 2014, 5, 927–937. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Feng, N. Simulation research on an electric vehicle chassis system based on a collaborative control system. Energies 2014, 61, 312–328. [Google Scholar] [CrossRef]
- Antonio, C.; Carlos, P.; David, P.D.; Oscar, M.A. Planning minimum interurban fast charging infrastructure for electric vehicles: Methodology and application to Spain. Energies 2014, 7, 1207–1229. [Google Scholar]
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated charging of plug-in hybrid electric vehicles to minimize distribution system losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Sousa, T.; Lin, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Jiang, J.; Wang, L.; Zhang, W. Robust and scalable management of power networks in dual-source trolleybus systems: A consensus control framework. IEEE Trans. Intell. Transp. Syst 2016, 17, 1029–1038. [Google Scholar] [CrossRef]
- Soares, J.; Ghazvini, M.A.F.; Borges, N.; Vale, Z. A stochastic model for energy resources management considering demand response in smart grids. Electr. Power Syst. Res. 2017, 143, 599–610. [Google Scholar] [CrossRef]
- Roy, J.V.; Leemput, V.N.; Geth, F.; Büscher, J.; Driesen, J. Electric vehicle charging in an office building microgrid with distributed energy resources. IEEE Trans. Sustain. Energy 2014, 5, 1389–1396. [Google Scholar]
- Zhang, K.; Xu, F.; Ouyang, M.; Wang, H.; Lu, L.; Li, J.; Li, Z. Optimal decentralized valley-filling charging strategy for electric vehicles. Energy Convers. Manag. 2014, 78, 537–550. [Google Scholar] [CrossRef]
- Salah, F.; Ilg, J.P.; Flath, C.M.; Basse, H.; Dinther, C. Impact of electric vehicles on distribution substations: A Swiss case study. Appl. Energy 2015, 137, 88–96. [Google Scholar] [CrossRef]
- Katarina, K.; Mattia, M. Phase-wise enhanced voltage support from electric vehicles in aDanish low-voltage distribution grid. Electr. Power Syst. Res. 2016, 140, 274–283. [Google Scholar]
- Richardson, P.; Flynn, D.; Keane, A. Local versus centralized charging strategies for electric vehicles in low voltage distribution systems. IEEE Trans. Smart Grid 2012, 3, 1020–1028. [Google Scholar] [CrossRef]
- Liu, D.; Wang, Y.; Shen, Y. Electric vehicle charging and discharging coordination on distribution network using multi-objective particle swarm optimization and fuzzy decision making. Energies 2016, 9, 1. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Tian, L.; Shi, S.; Jia, Z. A statistical model for charging power demand of electric vehicles. Power Syst. Technol. 2010, 34, 126–130. [Google Scholar]
- Ashtari, A.; Bibeau, E.; Shahidinejad, S.; Molinski, T. PEV charging profile prediction and analysis based on vehicle usage data. IEEE Trans. Smart Grid 2012, 3, 341–350. [Google Scholar] [CrossRef]
- Hadley, S.W.; Tsvetkova, A.A. Potential impacts of plug-in hybrid electric vehicles on regional power generation. Electr. J. 2009, 22, 56–68. [Google Scholar] [CrossRef]
- Bakker, S. Standardization of EV Recharging Infrastructures; E-mobility NSR: Delft, The Netherlands, 2013. [Google Scholar]
- On-Board Conductive Charger for Electric Vehicles, QC/T 895-2011. Available online: http://www.codeofchina.com/standard/QCT895-2011.html (accessed on 18 January 2017).
- Zhang, D.; Jiang, J.; Zhang, W.; Zhang, Y.; Huang, Y. Economic operation of electric vehicle battery swapping station based on genetic algorithms. Power Syst. Technol. 2013, 37, 2101–2107. [Google Scholar]
- Jiang, J.; Bao, Y.; Wang, L.Y. Topology of a bidirectional converter for energy interaction between electric vehicles and the grid. Energies 2014, 7, 4858–4894. [Google Scholar] [CrossRef]
- Sarasketa-Zabala, E.; Gandiaga, I.; Rodriguez-Martinez, L.M.; Villarreal, I. Cycle ageing analysis of a LiFePO4/graphite cell with dynamic model validations: Towards realistic lifetime predictions. J. Power Sources 2015, 275, 573–587. [Google Scholar] [CrossRef]
- Ma, Z.; Jiang, J.; Shi, W.; Zhang, W.; Mi, C.C. Investigation of path dependence in commercial lithium-ion cells for pure electric bus applications: Aging mechanism identification. J. Power Sources 2015, 274, 29–40. [Google Scholar] [CrossRef]
- Barré, A.; Deguilhem, B.; Grolleau, S.; Gérard, M.; Suard, F.; Riu, D. A review on lithium-ion battery ageing mechanisms and estimations for automotive applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef]
- Monem, M.A.; Trad, K.; Omar, N.; Hegazy, O.; Mantels, B.; Mulder, G.; Van den Bossche, P.; Van Mierlo, J. Lithium-ion batteries: Evaluation study of different charging methodologies based on aging process. Appl. Energy 2015, 152, 143–155. [Google Scholar] [CrossRef]
- Li, J.; Murphy, E.; Winnick, J.; Kohl, P.A. The effects of pulse charging on cycling characteristics of commercial lithium-ion batteries. J. Power Sources 2001, 102, 302–309. [Google Scholar] [CrossRef]
- Papoulis, A.; Pillai, S.U. Probability, Random Variables, and Stochastic Processes, 4th ed.; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Ash, R.B. Real Analysis and Probability; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Taylor, H.M.; Karlin, S. An Introduction to Stochastic Modeling, 3rd ed.; Academic Press: Chestnut Hill, MA, USA, 1998. [Google Scholar]
- Tant, J.; Geth, F.; Six, D.; Tant, P.; Driesen, J. Multiobjective battery storage to improve PV integration in residential distribution grids. IEEE Trans. Sustain. Energy 2013, 4, 182–191. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| M | Number of EVs |
| Ci | Average daily charging demand of the ith EV |
| pmax | Maximum output power of on-board charger |
| pc | EV charging power |
| T | EV charging time period |
| tstart | EV charging start time |
| tend | EV charging end time |
| The charging power for the ith vehicle in the kth time block | |
| Length of one time block | |
| N | Number of time blocks |
| The total charging energy of ith EV in the entire time period | |
| fi(k) | The ith EV charging probability constant in the kth time block |
| Xi | Needed number of time blocks for the ith EV |
| Number of time blocks charged for the ith EV after k − 1 time blocks | |
| pEV(k) | The EV charging power in the kth time block |
| pB(k) | The battery output in the kth time block |
| PLoad(k) | The battery-supported load power in the kth time block |
| S(k) | SOC (State of Charge) of the battery storage system in the kth time block |
| Q | The energy capacity of the battery storage system in the kth time block |
| pbase(k) | Regular load of regional distribution gird |
| L | Number of the phases that the whole charging period is divided into considering the regular load |
| T’ | The new charging duration in each phase |
| B | Desired value of sum of regular load and EV charging power in the regional distribution gird |
| Ci(l) | The charging demand of the ith EV in lth phase |
| Charge Duration T (Hour) | 6 | 7 | 8 | 9 |
|---|---|---|---|---|
| 69.2% | 81.3% | 89.0% | 93.5% | |
| Average efficiency | 91.3% | 90.4% | 89.5% | 88.7% |
| Number M of EVs | 100 | 300 | 500 | 1000 |
|---|---|---|---|---|
| Maximum power fluctuation | 29% | 15% | 12% | 6% |
| Number N of Time Blocks | 16 | 32 | 96 | 480 |
|---|---|---|---|---|
| Charge completion | 86.6% | 88.8% | 94.5% | 97.2% |
| Case Number | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Energy capacity (kWh) | No battery | 6.5 | 10.4 | 14.3 |
| Maximum power (kW) | No battery | 3.25 | 5.2 | 7.15 |
| Maximum power fluctuations | 6% | 5% | 3% | 1% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Zhang, D.; Mu, B.; Wang, L.Y.; Bao, Y.; Jiang, J.; Morais, H. Decentralized Electric Vehicle Charging Strategies for Reduced Load Variation and Guaranteed Charge Completion in Regional Distribution Grids. Energies 2017, 10, 147. https://doi.org/10.3390/en10020147
Zhang W, Zhang D, Mu B, Wang LY, Bao Y, Jiang J, Morais H. Decentralized Electric Vehicle Charging Strategies for Reduced Load Variation and Guaranteed Charge Completion in Regional Distribution Grids. Energies. 2017; 10(2):147. https://doi.org/10.3390/en10020147
Chicago/Turabian StyleZhang, Weige, Di Zhang, Biqiang Mu, Le Yi Wang, Yan Bao, Jiuchun Jiang, and Hugo Morais. 2017. "Decentralized Electric Vehicle Charging Strategies for Reduced Load Variation and Guaranteed Charge Completion in Regional Distribution Grids" Energies 10, no. 2: 147. https://doi.org/10.3390/en10020147
APA StyleZhang, W., Zhang, D., Mu, B., Wang, L. Y., Bao, Y., Jiang, J., & Morais, H. (2017). Decentralized Electric Vehicle Charging Strategies for Reduced Load Variation and Guaranteed Charge Completion in Regional Distribution Grids. Energies, 10(2), 147. https://doi.org/10.3390/en10020147