Hysteresis Analysis and Control of a Metal-Polymer Hybrid Soft Actuator



Abstract
:1. Introduction
2. Experimental Procedure
2.1. Physical-Chemical Analysis
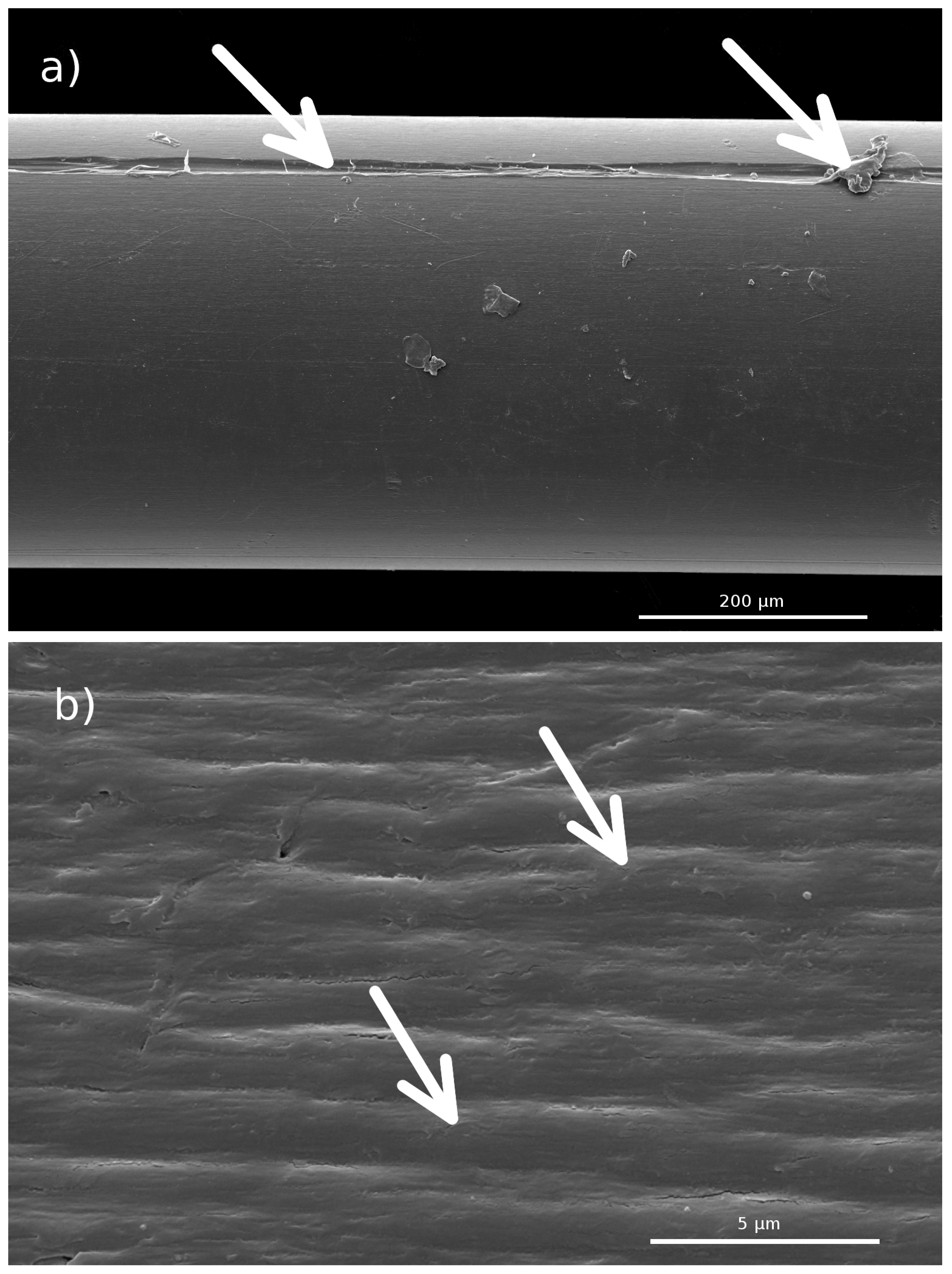
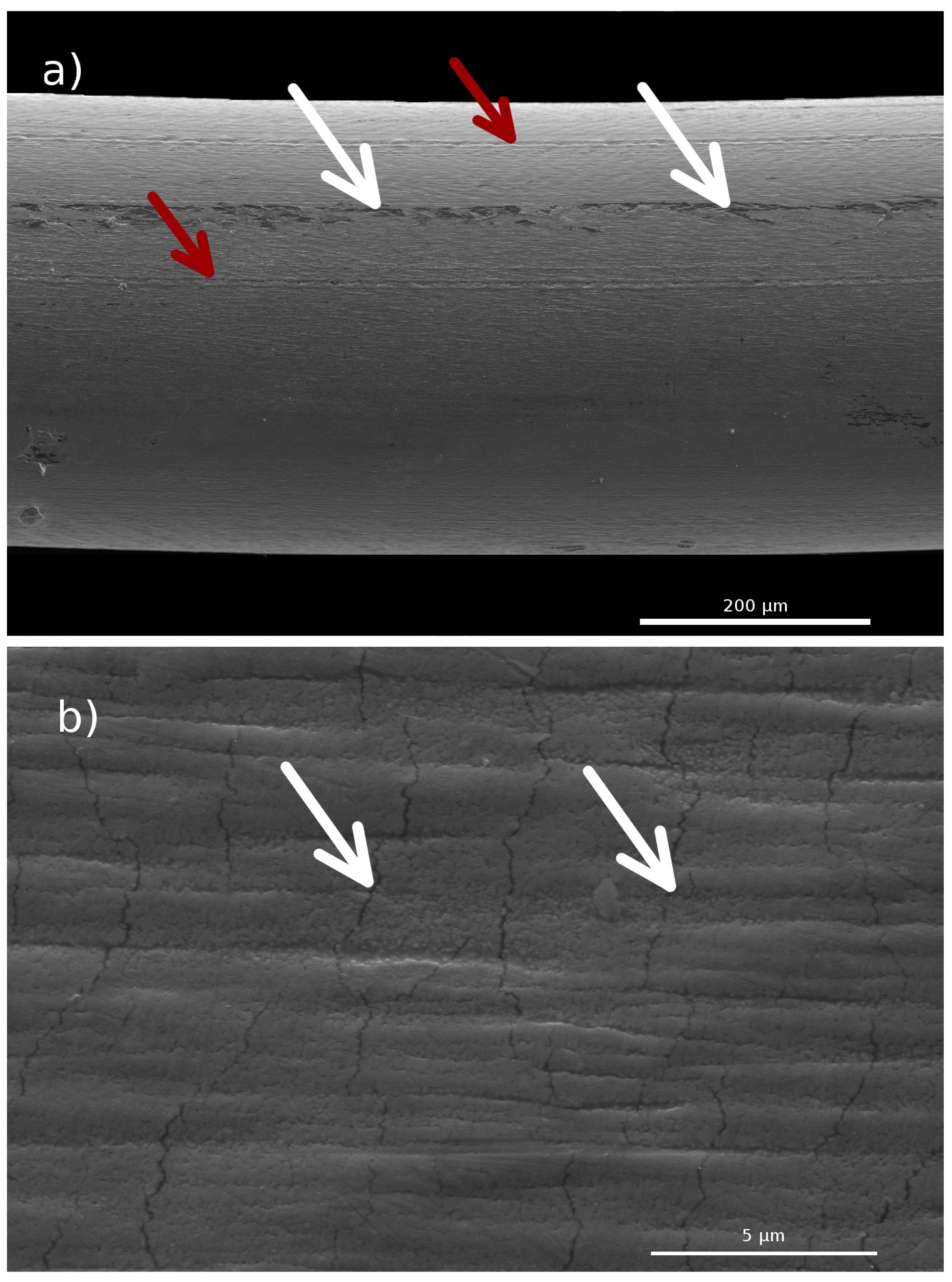
2.1.1. Surface Morphology Analysis
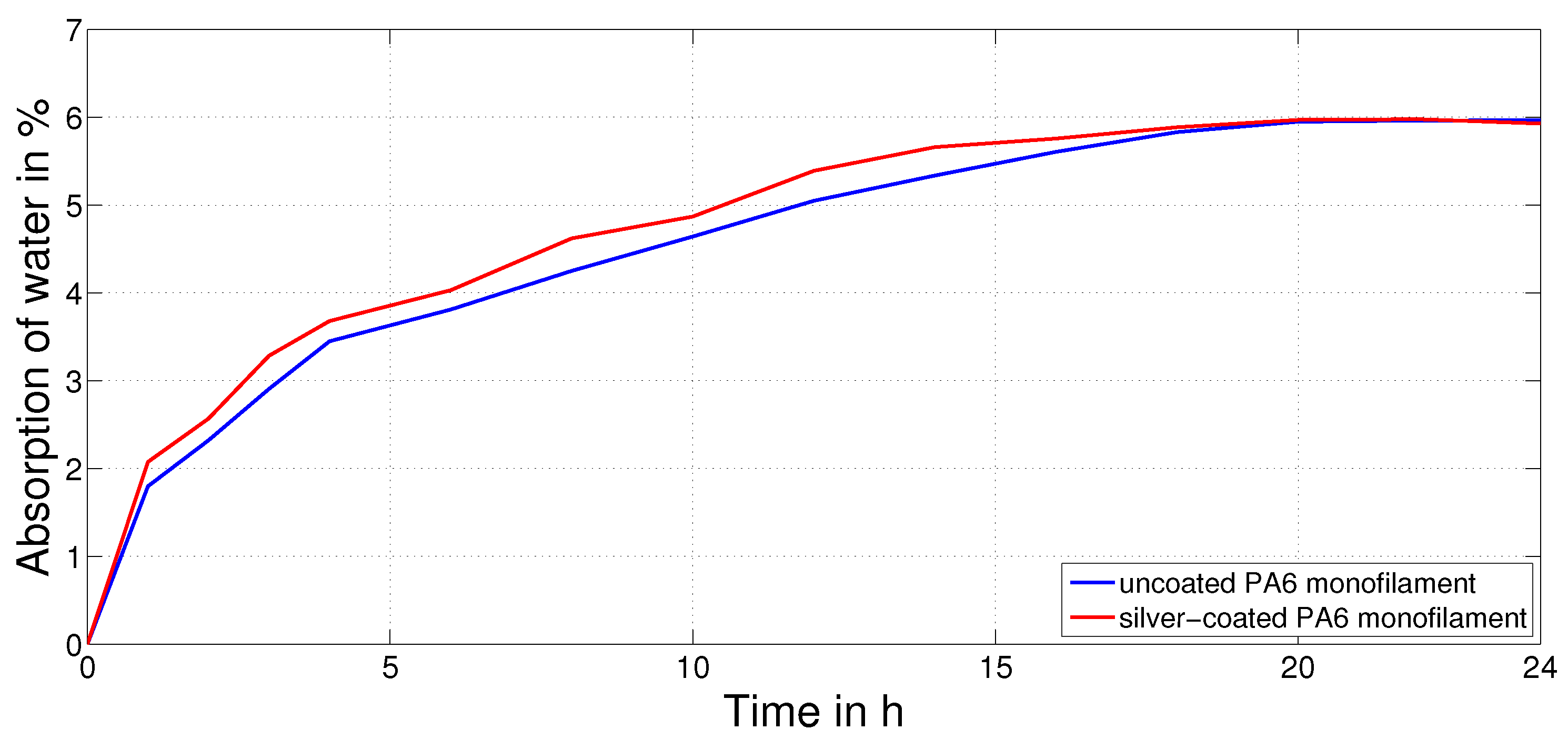
2.1.2. Water Immersion Test
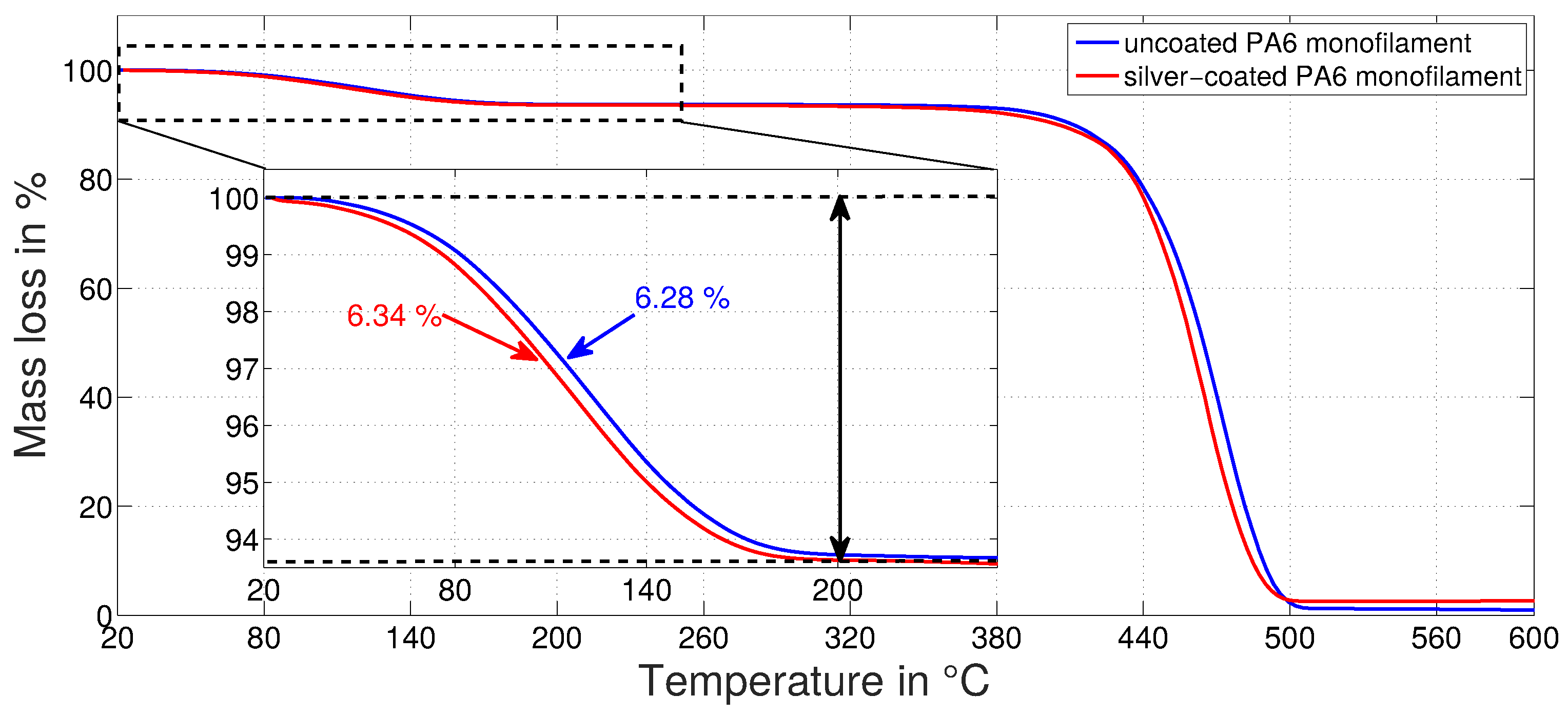
2.1.3. Thermogravimetric Analysis
2.2. Parameter Identification
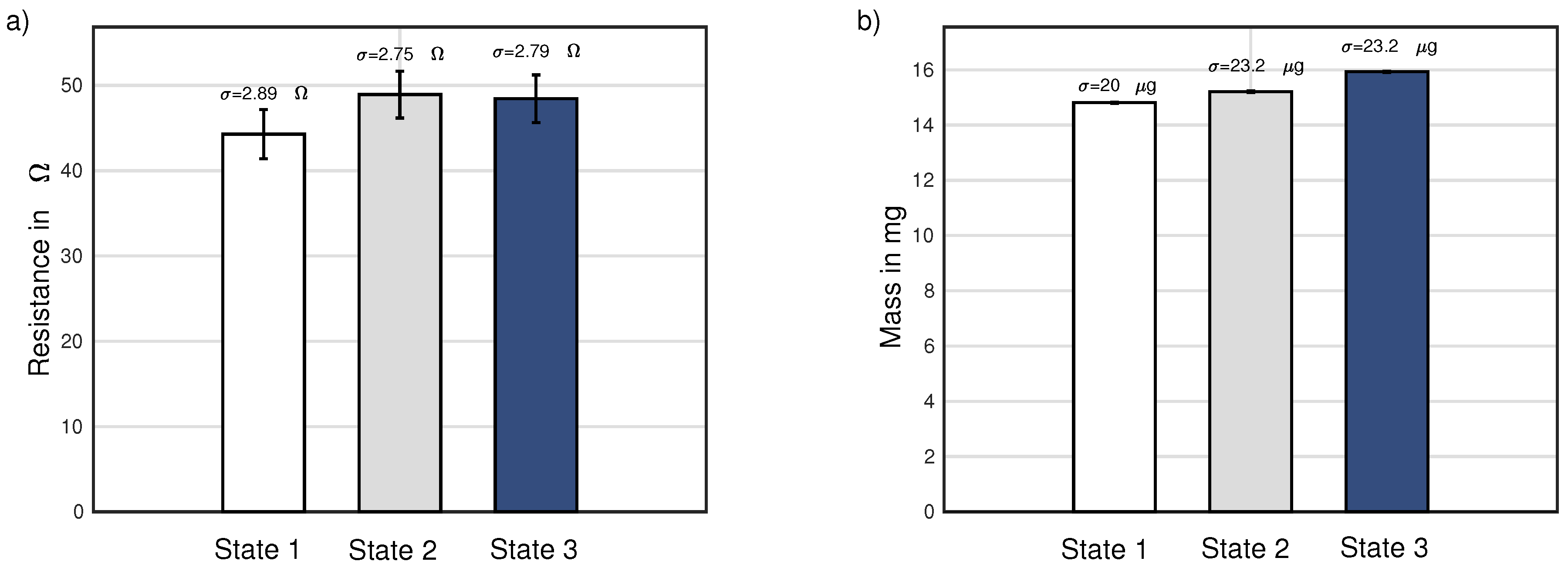
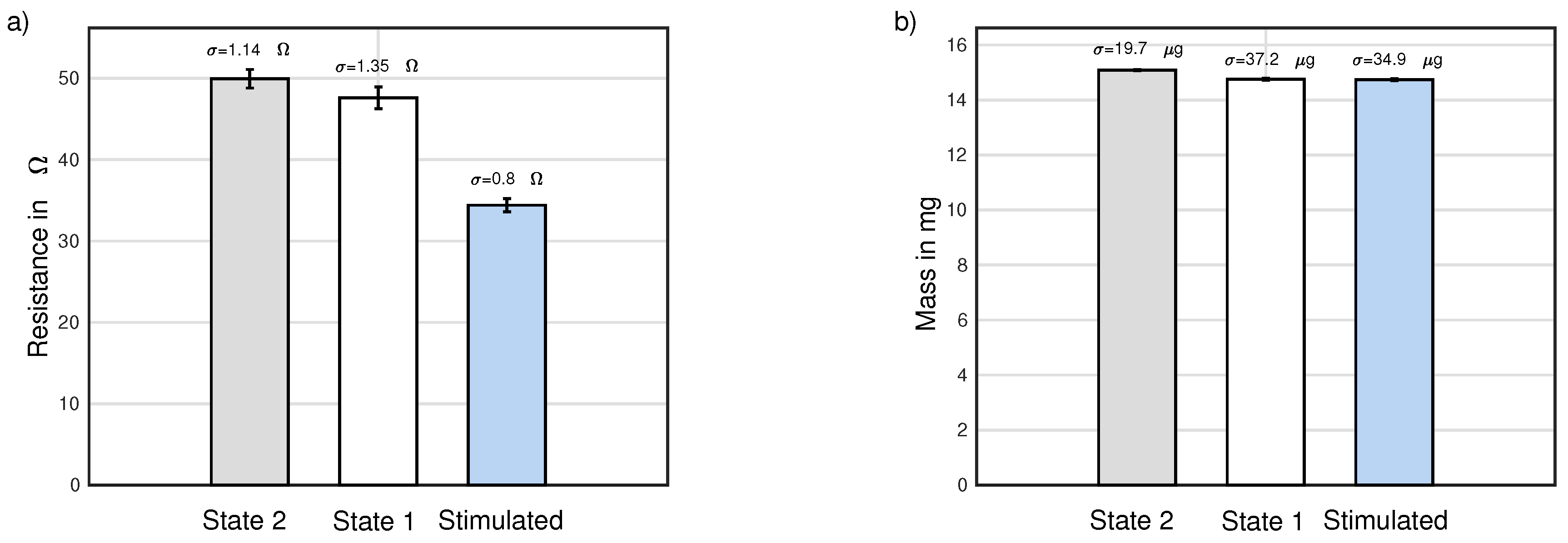
2.2.1. Resistance Analysis
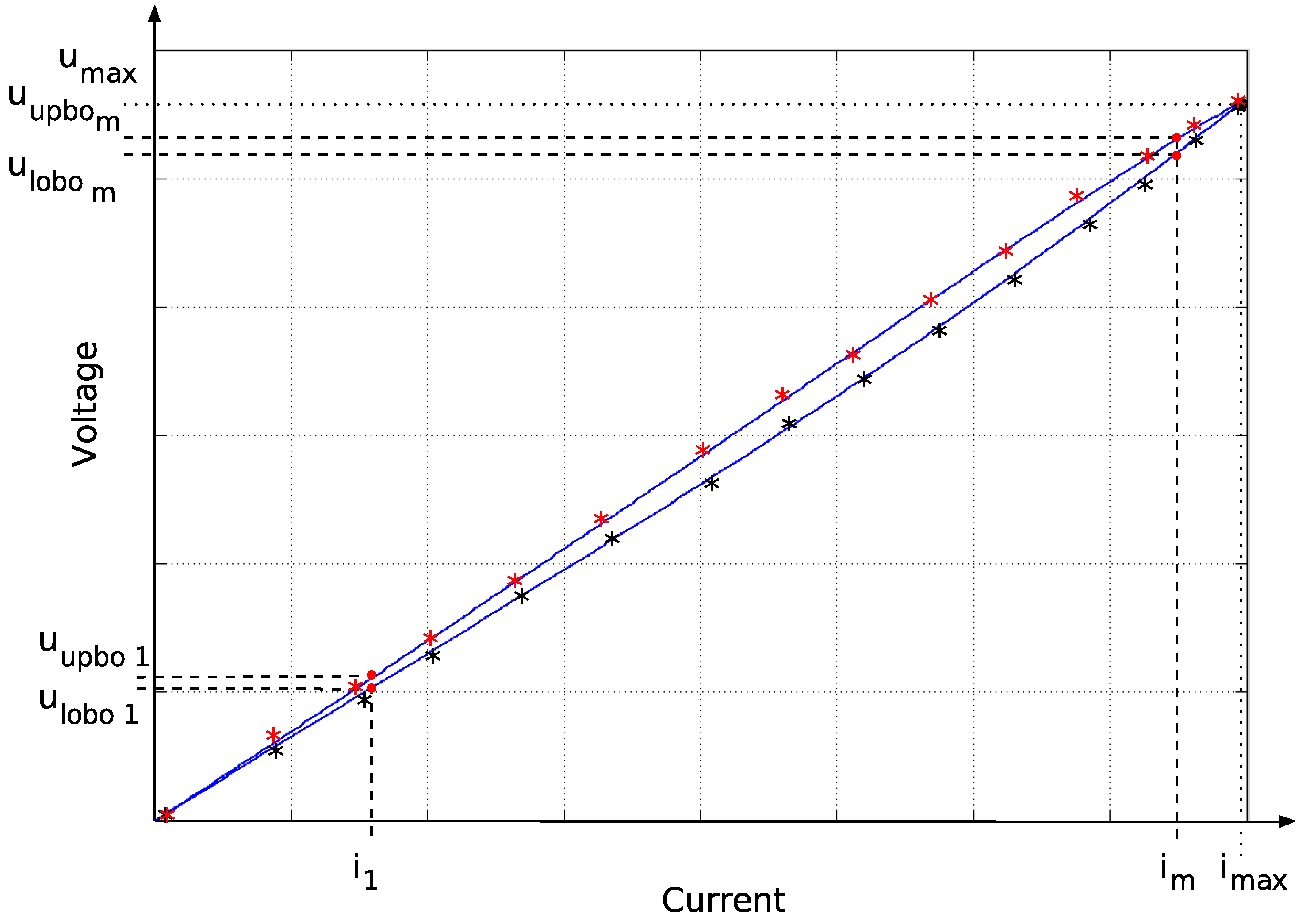
2.2.2. Hysteresis Analysis of Metal-Polymer Hybrid Material
3. Metal-Polymer Hybrid Soft Actuator as a Hybrid Dynamic System
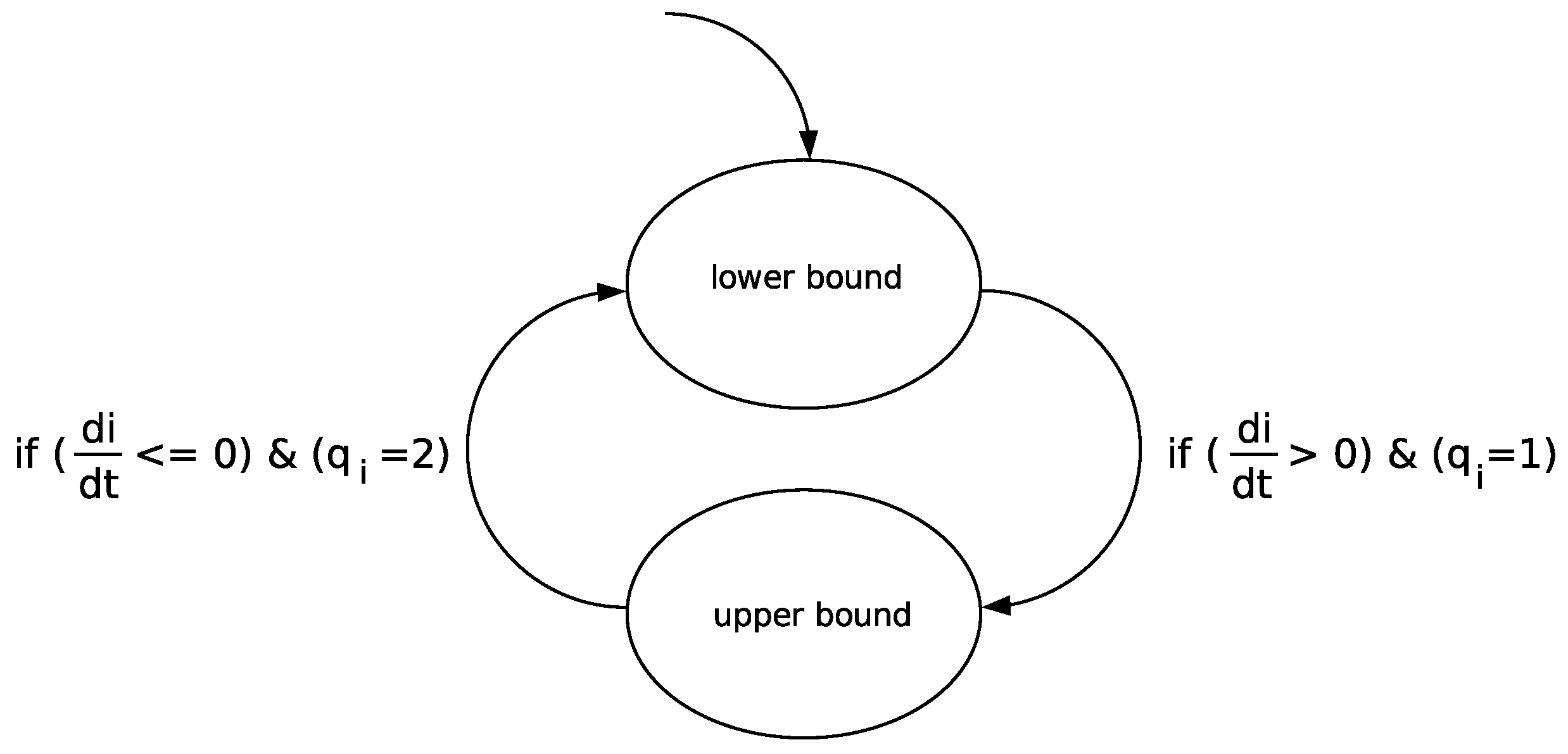
3.1. Switching Logic Algorithm
3.2. A Constructive Sufficient Condition for Stability
4. Results and Discussion
4.1. Physical-Chemical Analysis
4.1.1. Surface Morphology Analysis
4.1.2. Water Immersion Test
4.1.3. Thermogravimetric Analysis
4.2. Parameter Identification
4.2.1. Analysis of the Resistance
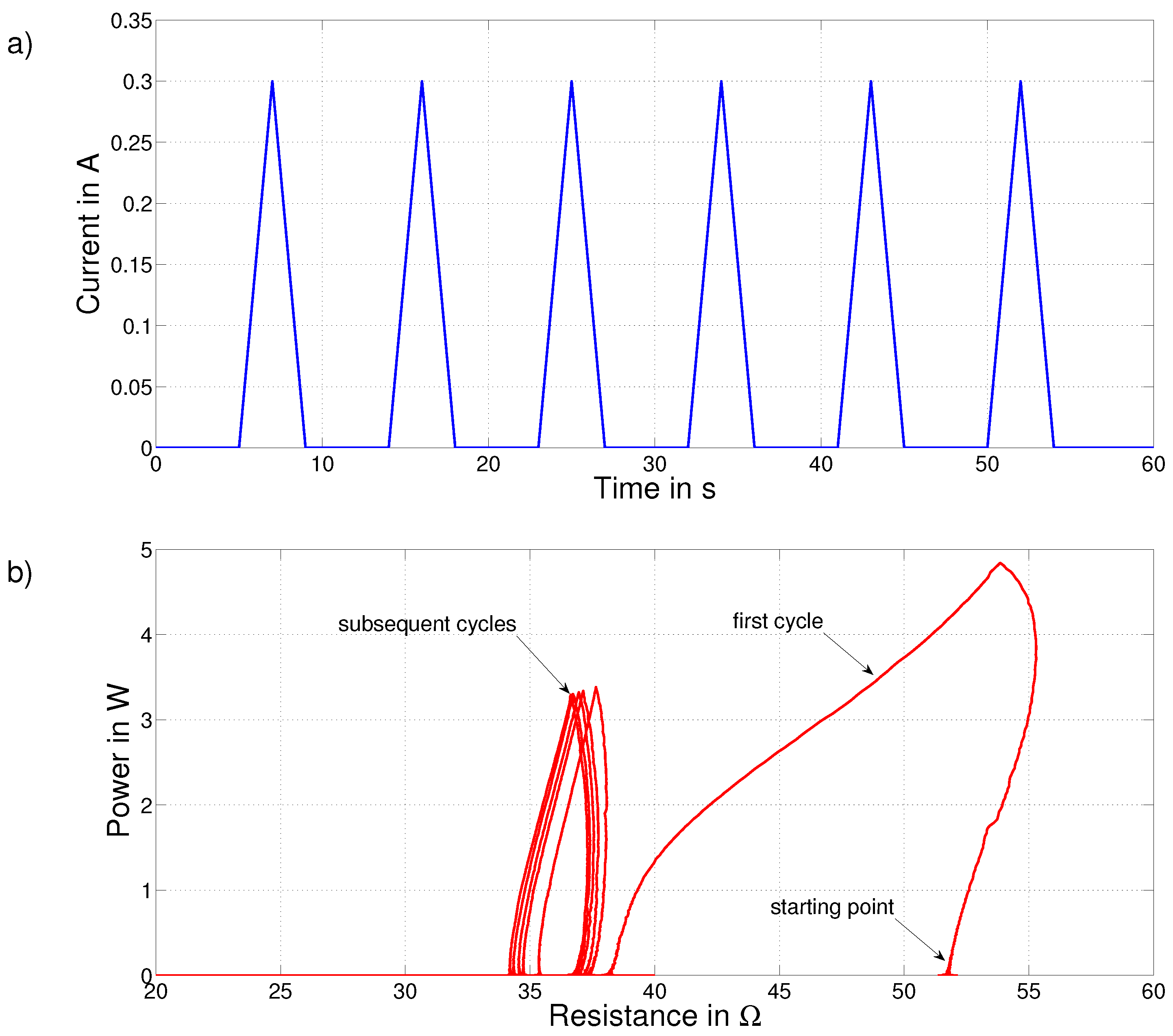
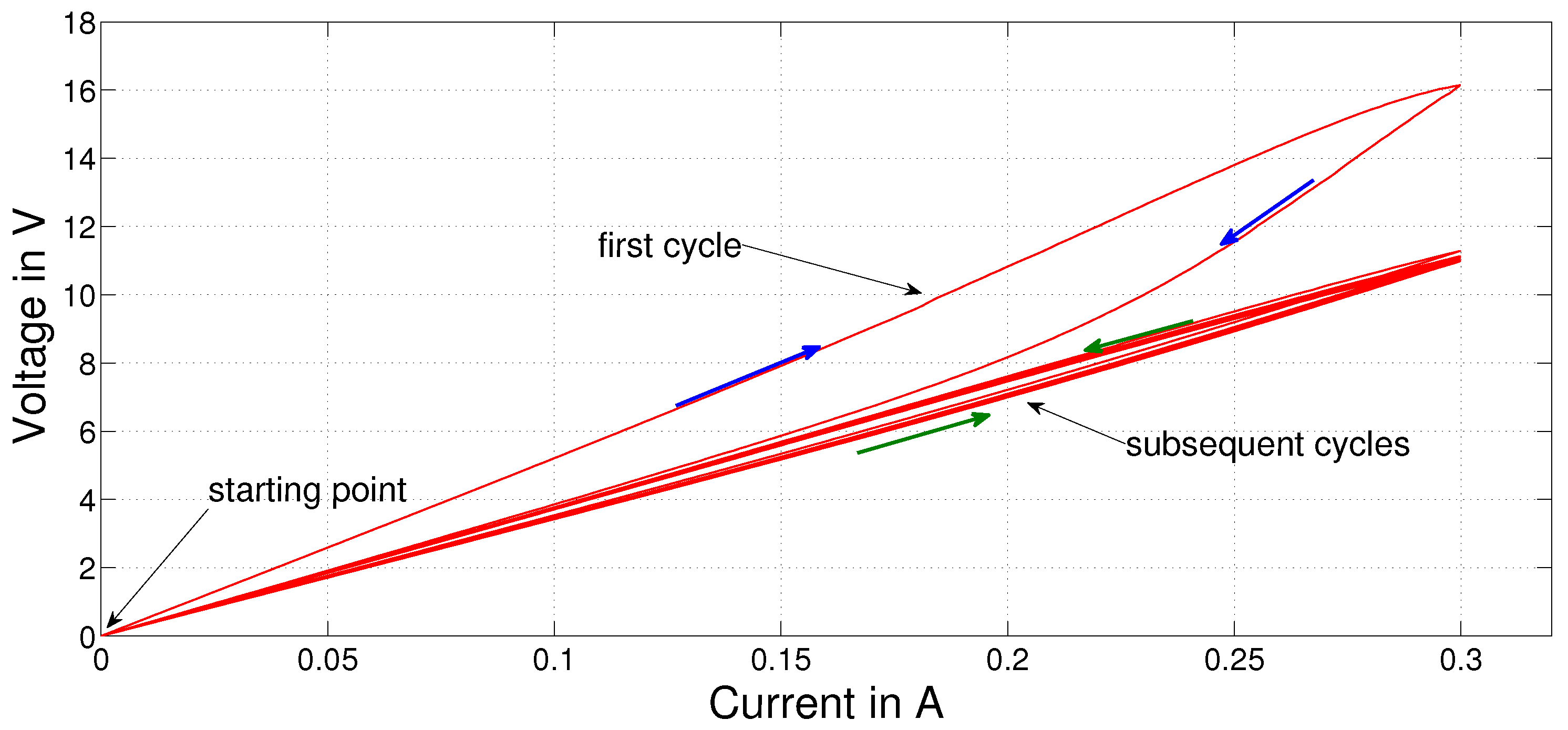
4.2.2. Hysteresis Analysis of Metal-Polymer Hybrid Material
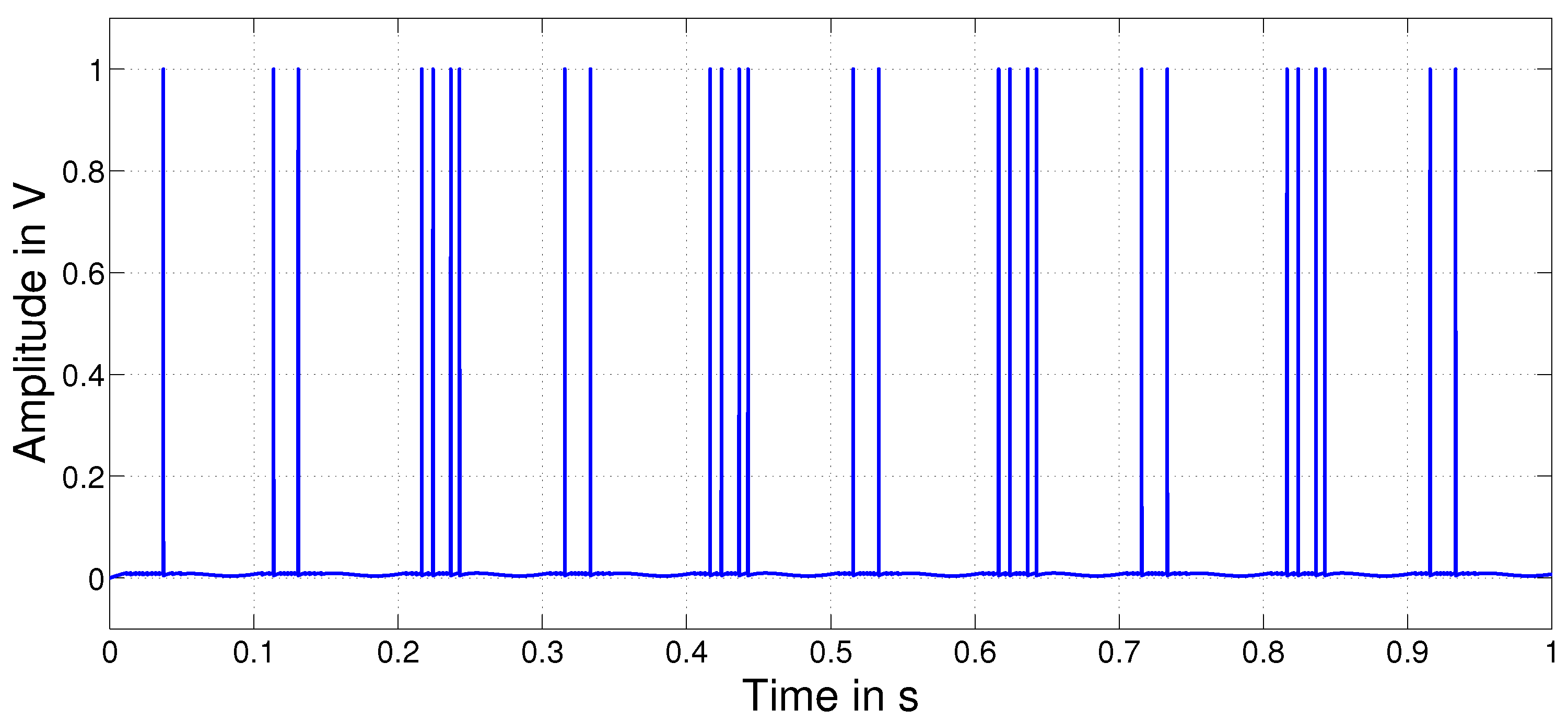
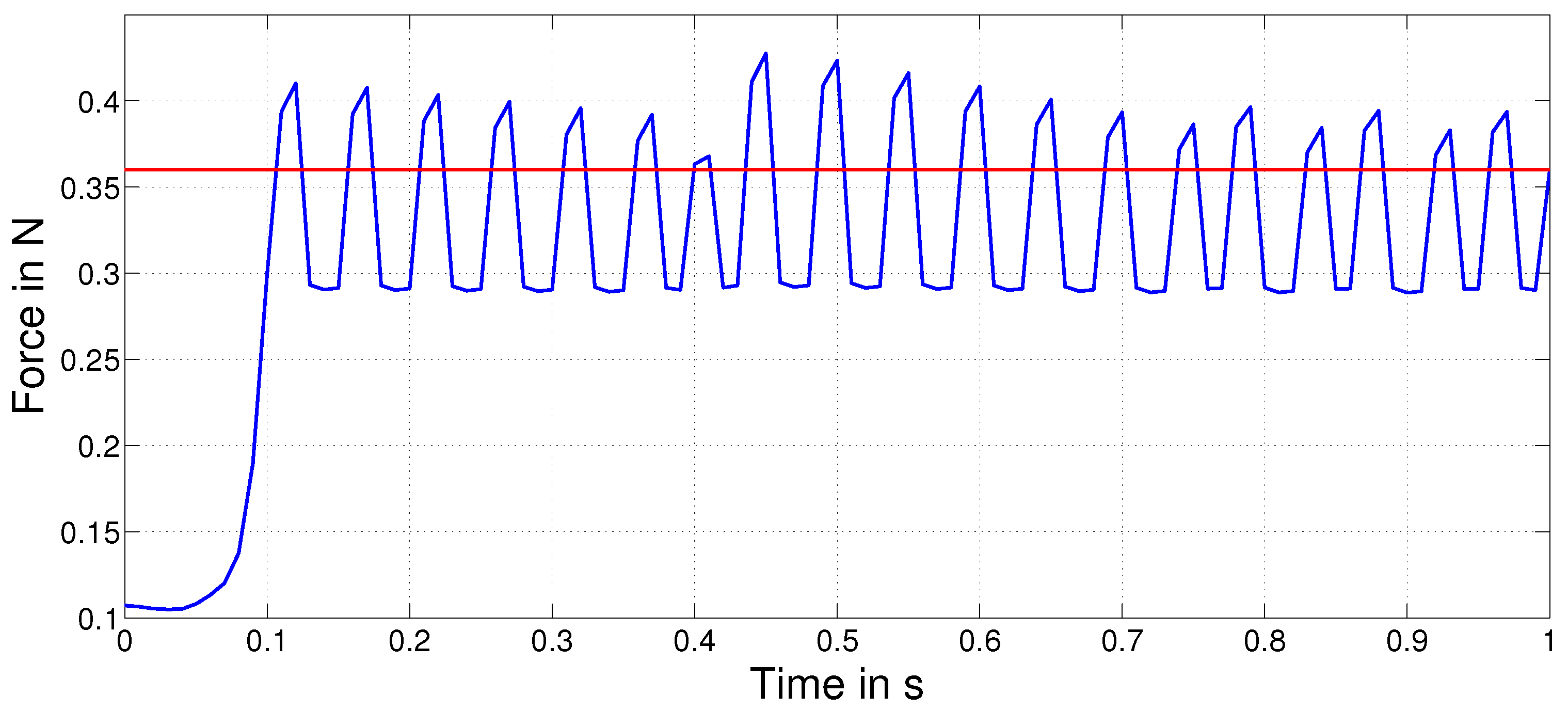
4.3. Switching Logic Algorithm for Hybrid Dynamic System and a Non-Linear Integral Sliding Mode
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SEM | Scanning electron microscope |
| SMU | Source/measure unit |
| TGA | Thermogravimetric analysis |
| EAP | Electro-active polymers |
| PE | Polyethylene |
| SMA | Shape-memory alloy |
Nomenclature
| Polynomial coefficient | |
| Error | |
| Voltage disturbance | |
| Switching parameter | |
| Constant | |
| Constant | |
| Constant | |
| Constant | |
| Input current | |
| Desired current | |
| Limited current | |
| Input voltage | |
| Sliding equivalent input signal | |
| Upper bound voltage trajectory | |
| Lower bound voltage trajectory | |
| Resistance | |
| L | Inductance |
| S(t) | Sliding surface |
| L | Liter |
| l | Length |
| Mass | |
| Thickness of the boundary layer | |
| Mean value | |
| Standard deviation |
References
- Carpi, F.; De Rossi, D. Electroactive polymer-based devices for e-textiles in biomedicine. IEEE Trans. Inf. Technol. Biomed. 2005, 9, 295–318. [Google Scholar] [CrossRef] [PubMed]
- Schimmack, M.; Hand, A.; Mercorelli, P.; Georgiadis, A. Using a seminorm for wavelet denoising of sEMG signals for monitoring during rehabilitation with embedded orthosis system. In Proceedings of the IEEE MeMeA—International Symposium on Medical Measurements and Applications, Torino, Italy, 7–9 May 2015; pp. 1773–1778. [Google Scholar]
- Schimmack, M.; Mercorelli, P. An Extended Kalman Filter as an Observer in a Sliding Mode Controller for a Metal-Polymer Composite Actuator; Springer: Cham, Switzerland, 2005; Volume 427, pp. 305–314. [Google Scholar]
- Kruusamäe, K.; Punning, A.; Aabloo, A.; Asaka, K. Self-sensing ionic polymer actuators: A review. Actuators 2015, 4, 17. [Google Scholar] [CrossRef]
- Hilber, W. Stimulus-active polymer actuators for next-generation microfluidic devices. Appl. Phys. A 2016, 122, 751. [Google Scholar] [CrossRef]
- Chen, F.J.; Dirven, S.; Xu, W.L.; Li, X.N. Soft actuator mimicking human Esophageal peristalsis for a swallowing robot. IEEE/ASME Trans. Mech. 2014, 19, 1300–1308. [Google Scholar] [CrossRef]
- Kodama, T.; Okabe, A.; Kogiso, K. Simultaneous estimation of contraction ratio and parameter of McKibben pneumatic artificial muscle model using log-normalized unscented Kalman Filter. In Proceedings of the 2016 IEEE 4th International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA), Aichi, Japan, 6–7 October 2016; pp. 44–48. [Google Scholar]
- Smela, E. Conjugated polymer actuators for biomedical applications. Adv. Mater. 2003, 15, 481–494. [Google Scholar] [CrossRef]
- Mutlu, R.; Alici, G.; Li, W. A soft mechatronic microstage mechanism based on electroactive polymer actuators. IEEE/ASME Trans. Mech. 2016, 21, 1467–1478. [Google Scholar] [CrossRef]
- Seok, S.; Onal, C.D.; Cho, K.J.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A peristaltic soft robot with antagonistic nickel titanium coil actuators. IEEE/ASME Trans. Mech. 2013, 18, 1485–1497. [Google Scholar] [CrossRef]
- Lima, M.D.; Li, N.; de Andrade, M.J.; Fang, S.; Oh, J.; Spinks, G.M.; Kozlov, M.E.; Haines, C.S.; Suh, D.; Foroughi, J.; et al. Electrically, chemically, and photonically powered torsional and tensile actuation of hybrid carbon nanotube yarn muscles. Science 2012, 338, 928–932. [Google Scholar] [CrossRef] [PubMed]
- Schimmack, M.; McGaw, D.; Mercorelli, P. Wavelet based fault detection and RLS parameter estimation of conductive fibers with a simultaneous estimation of time-varying disturbance. IFAC Symp. Inf. Control Probl. Manuf. 2015, 48, 1773–1778. [Google Scholar] [CrossRef]
- Haines, C.; Lima, M.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.W.; Kim, S.H.; Fang, S.; de Andrade, M.J.; Göktepe, F.; et al. Artificial muscles from fishing line and sewing thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Ramazani, S.; Morshed, M.; Ghane, M. Effect of service temperature on structure and mechanical properties of polyamide 6 & 66 tyre cords. J. Polym. Res. 2011, 18, 781–792. [Google Scholar]
- Yip, M.C.; Niemeyer, G. High-performance robotic muscles from conductive nylon sewing thread. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2313–2318. [Google Scholar]
- Jayender, J.; Patel, R.V.; Nikumb, S.; Ostojic, M. Modeling and control of shape memory alloy actuators. IEEE Trans. Control Syst. Technol. 2008, 16, 279–287. [Google Scholar] [CrossRef]
- Ye, Z.; Chen, Z.; Kong, K.W.; Chan, H. Robust control of dielectric elastomer diaphragm actuator for replicating human pulse. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 188–193. [Google Scholar]
- Mercorelli, P. An anti-saturating adaptive pre-action and a slide surface to achieve soft landing control for electromagnetic actuators. IEEE/ASME Trans. Mech. 2012, 17, 76–85. [Google Scholar] [CrossRef]
- Xu, Z.; Rahman, M.F. Comparison of a sliding observer and a Kalman filter for direct-torque-controlled IPM synchronous motor drives. IEEE Trans. Ind. Electron. 2012, 59, 4179–4188. [Google Scholar] [CrossRef]
- Xu, Q. Digital sliding-mode control of piezoelectric micropositioning system based on input-output model. IEEE Trans. Ind. Electron. 2014, 61, 5517–5526. [Google Scholar]
- Mercorelli, P. A two-stage sliding-mode high-gain observer to reduce uncertainties and disturbances effects for sensorless control in automotive applications. IEEE Trans. Ind. Electron. 2015, 62, 5929–5940. [Google Scholar] [CrossRef]
- ISO 62:2008 Plastics—Determination of Water Absorption; International Organization for Standardization (ISO): Geneva, Switzerland, 2008; pp. 1–17.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State 1 | indicates the dried monofilaments, which were maintained in an oven at C for h |
| State 2 | indicates the “as received” monofilaments with stabilized ambient temperature at C and a relative humidity of % |
| State 3 | indicates the monofilaments immersed in a beaker filled with 300 mL distilled h, maximum water absorption as previously described for the water immersion test |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schimmack, M.; Feistauer, E.E.; Amancio-Filho, S.T.; Mercorelli, P. Hysteresis Analysis and Control of a Metal-Polymer Hybrid Soft Actuator. Energies 2017, 10, 508. https://doi.org/10.3390/en10040508
Schimmack M, Feistauer EE, Amancio-Filho ST, Mercorelli P. Hysteresis Analysis and Control of a Metal-Polymer Hybrid Soft Actuator. Energies. 2017; 10(4):508. https://doi.org/10.3390/en10040508
Chicago/Turabian StyleSchimmack, Manuel, Eduardo E. Feistauer, Sergio T. Amancio-Filho, and Paolo Mercorelli. 2017. "Hysteresis Analysis and Control of a Metal-Polymer Hybrid Soft Actuator" Energies 10, no. 4: 508. https://doi.org/10.3390/en10040508
APA StyleSchimmack, M., Feistauer, E. E., Amancio-Filho, S. T., & Mercorelli, P. (2017). Hysteresis Analysis and Control of a Metal-Polymer Hybrid Soft Actuator. Energies, 10(4), 508. https://doi.org/10.3390/en10040508