2.1. System Definition
In the system definition phase, all of the preliminary vehicle specifications must be provided, in terms of vehicle geometry, drivetrain and components’ characteristics. By choosing the vehicle category, it is possible to enter this into a database where information are collected for each of the following main classes: economy vehicles, sport vehicles, SUV, trucks, buses. In particular, for each of these classes, an initial curb weight for the vehicle is considered, together with tire rolling resistance coefficients, vehicle geometry (height, width), drag coefficient, fuel type (density and lower heating value) and the final drive ratio. Moreover, also the gear ratios and a plausible gear shifting strategy are identified [
23,
24].
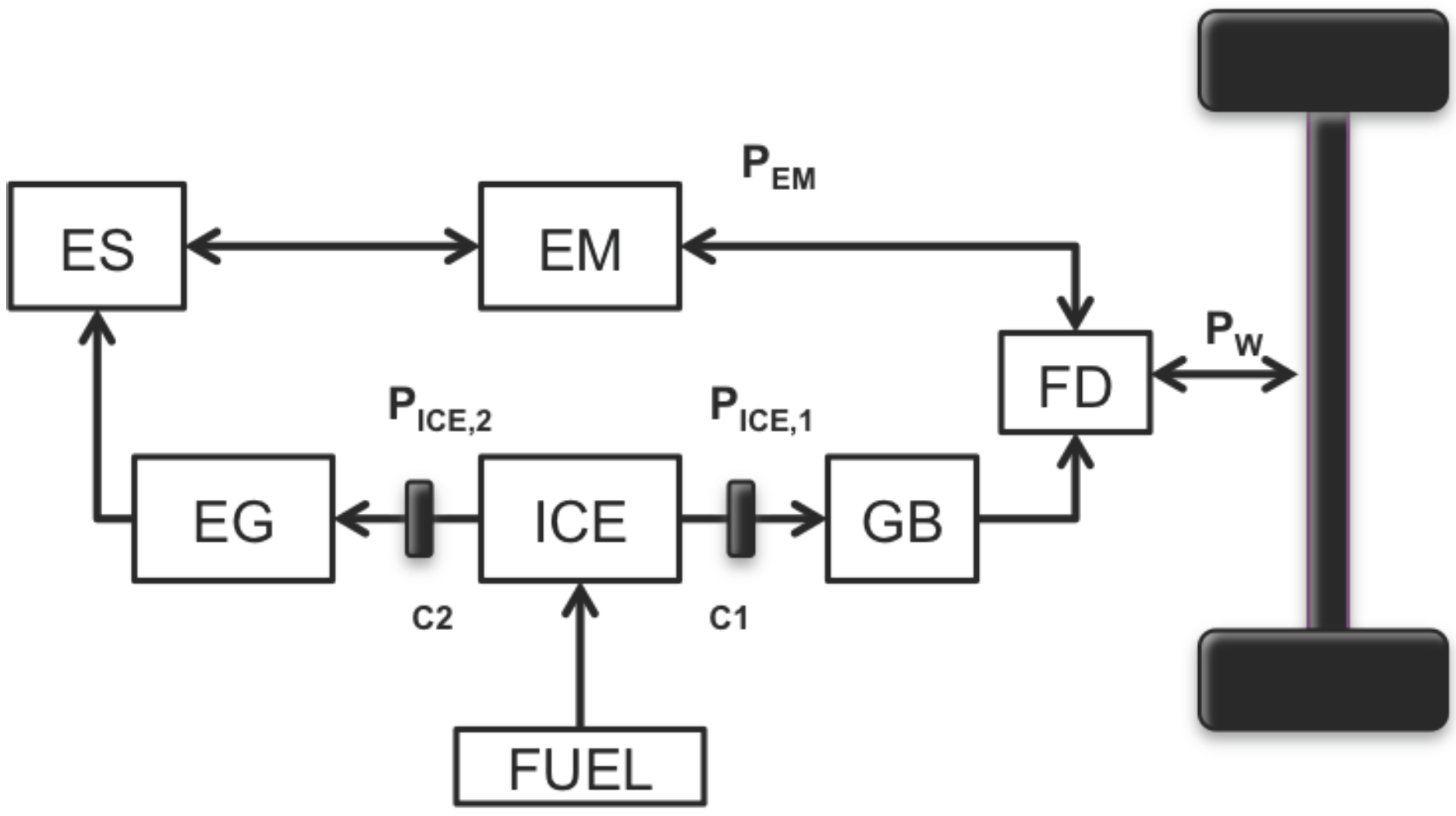
A general scheme of a post-transmission series/parallel hybrid powertrain is then considered and all of the possible energy paths are modeled in the powertrain, in order to take into account the three different architectures, i.e., series, parallel and combined. The energy flow diagram of this generic hybrid powertrain can be depicted as in
Figure 2, where ES (Energy Storage) is the battery, EM the Electric Machine, EG the Electric Generator, ICE the Internal Combustion Engine, GB stands for Gear Box and FD (Final Drive) represents the differential. Regenerative braking is implemented. The inclusion of all of these devices allows considering all of the possible topologies with one unique approach, but the final output of the optimization could be a pure parallel powertrain, characterized by just the EM and the ICE, without the EG.
The genset is connected to a gear box, while the electric motor is directly connected to the differential. In the genset, the ICE and the EG are directly connected one to the other, with no reduction ratio, which, in hybrid electric vehicles, is a common choice for reducing losses. Being an energy-based analysis, the transmission system accounts for an efficiency to be considered in the overall efficiency chain.
For modeling purposes, two clutches (
and
) can be located as in
Figure 2, and the different architectures can be defined by the proper combination of their setting:
- -
if and are both closed, the energy flow can be such that the power of the engine is provided both to the generator and to the wheels’ shaft, while the EM supplies power to the wheels, so that the vehicle powertrain has both series and parallel characteristics (i.e., combined architecture);
- -
if is closed and is opened, the vehicle works as a parallel HEV;
- -
if is opened and is closed, the vehicle works as a series HEV.
As shown in
Table 1, the clutches
and
can be replaced by binary values: the value 1 means that the clutch is closed, and therefore, the axle is connected; the value 0 means that the clutch is opened, so the axle is disconnected (no torque provided). In such a way, all of the possible energy paths within the powertrain can be condensed as in Equation (
1):
where
and
are the efficiencies of the gear box and the differential, respectively;
is the net power to the wheels;
is the ICE power to be split between the wheels and the EG;
is the EM power to the differential;
is the power supplied by the EG to the battery, while
is the EG efficiency.
Equation (
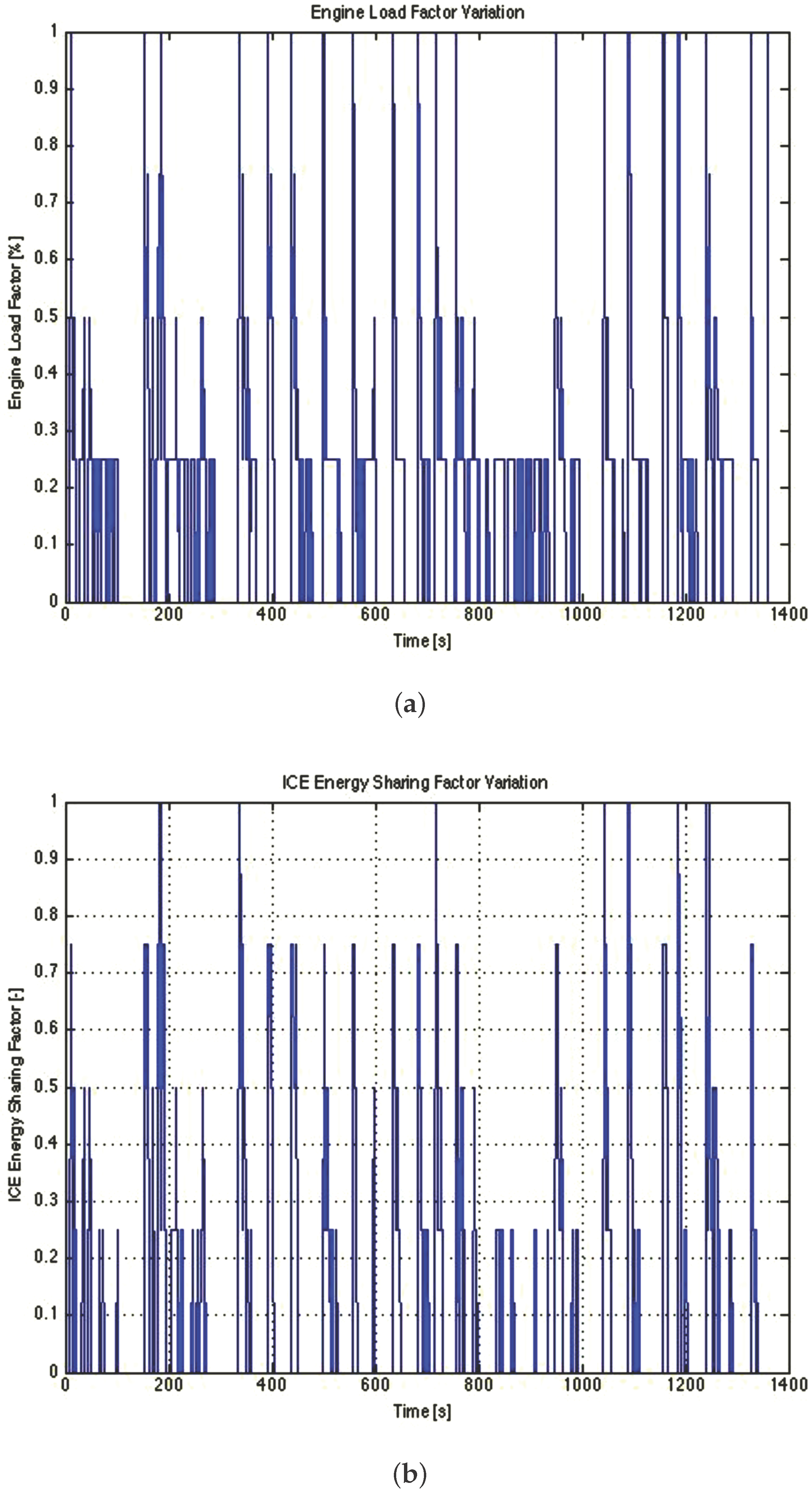
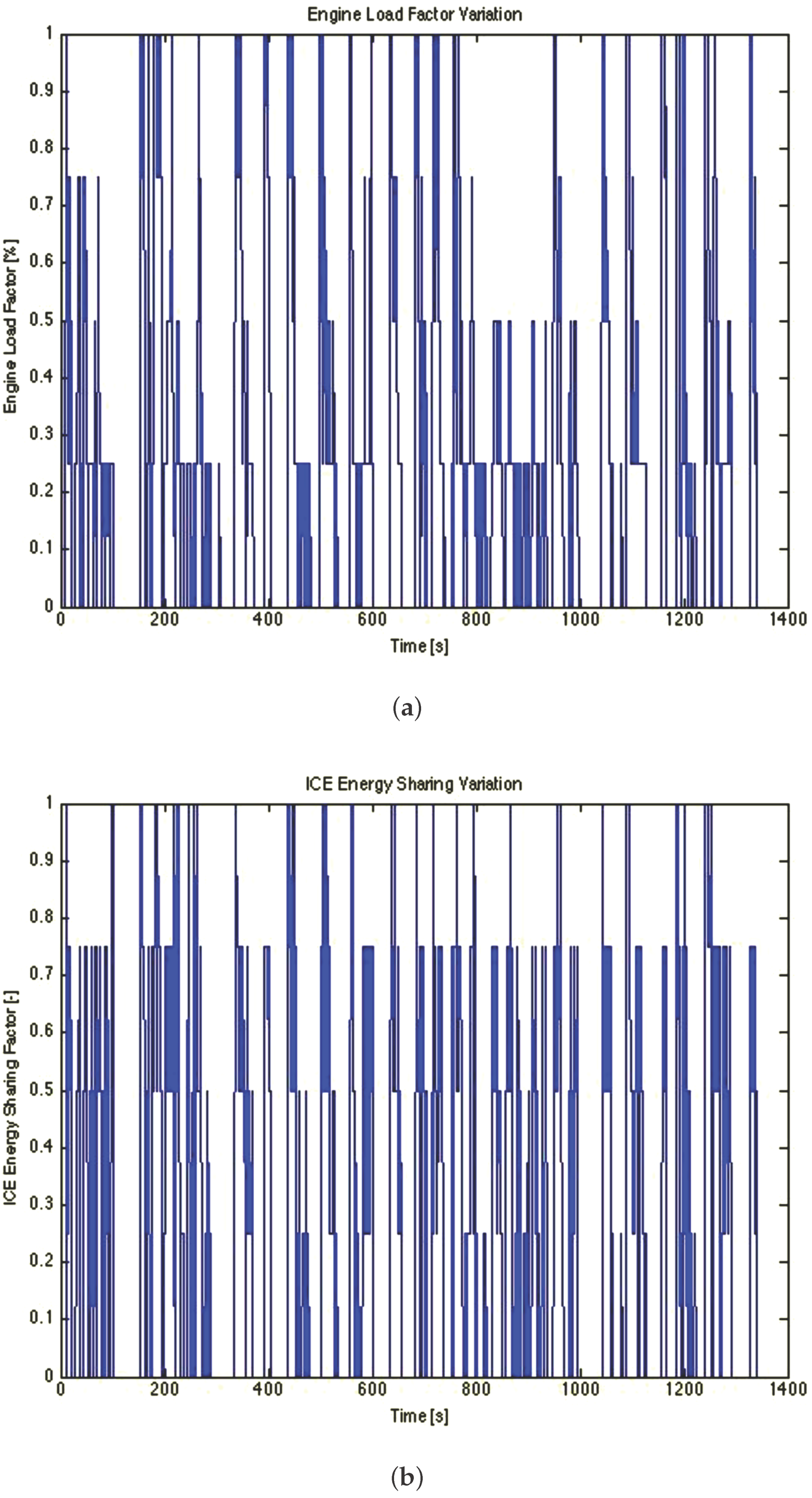
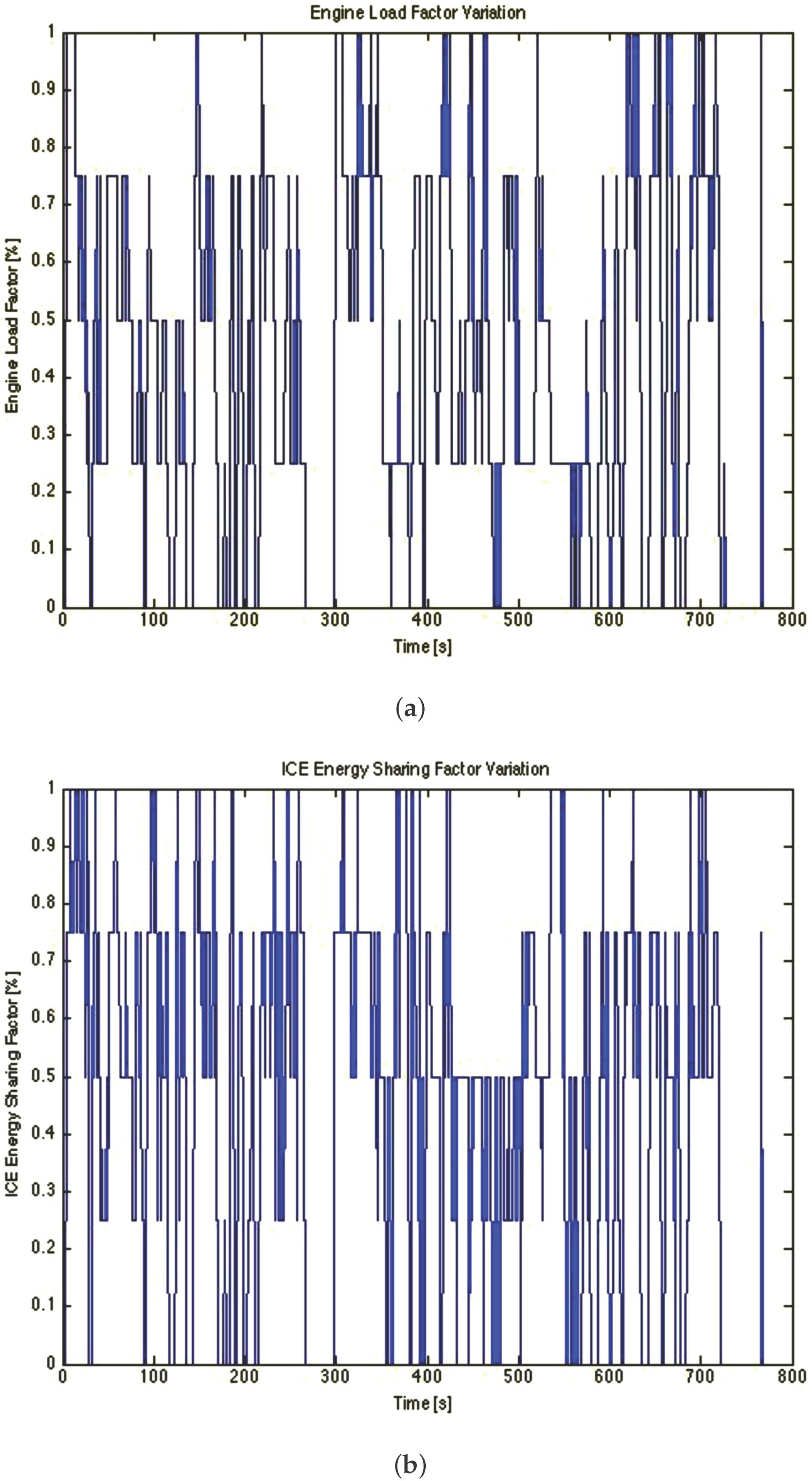
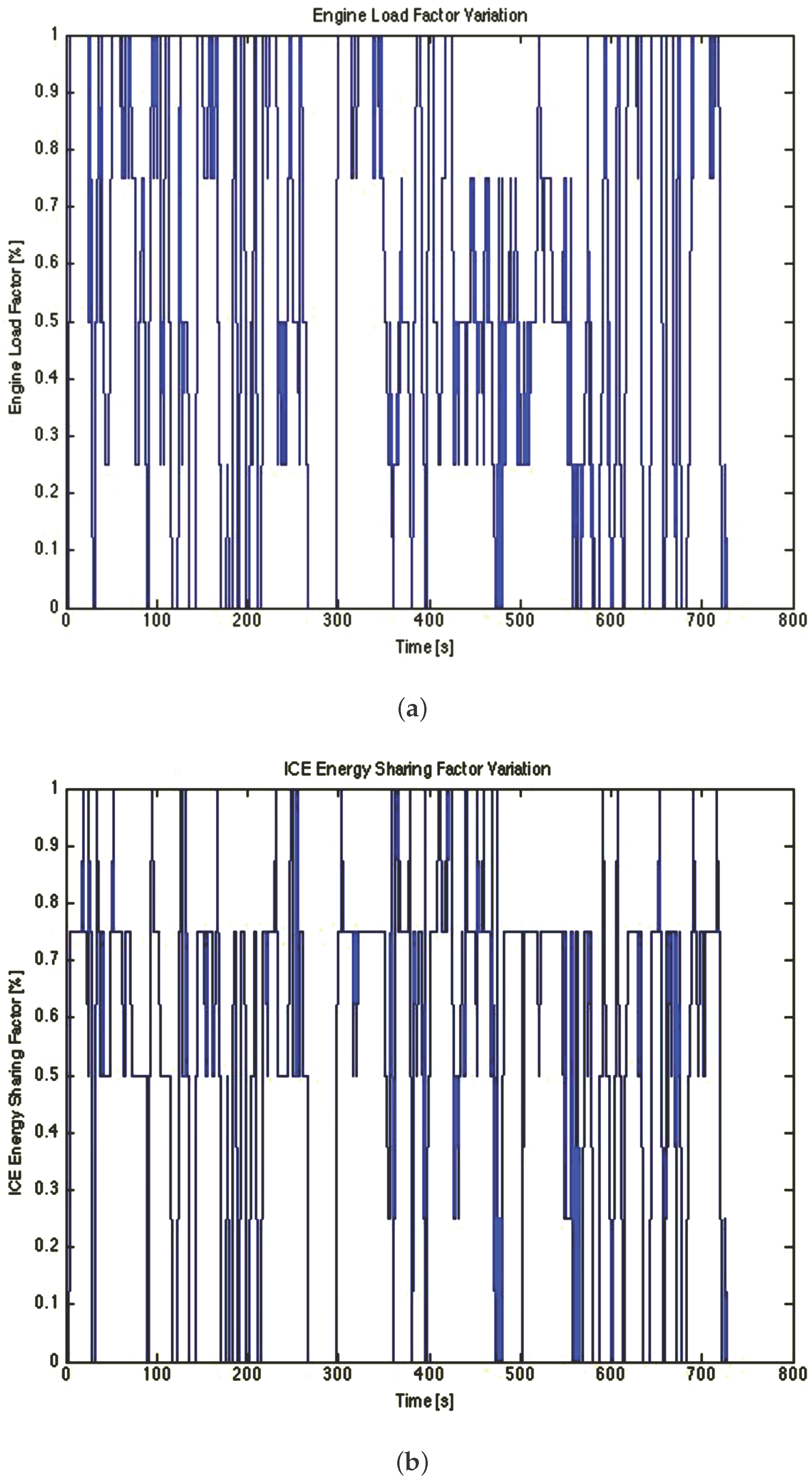
1) shows that the problem is characterized by two degrees of freedom, which can be identified with two factors to be used to describe the power split between the internal combustion engine and the electric machine and, for the engine itself, between the wheels and the generator. In particular,
represents a load factor for the ICE, and
represents the sharing factor of the ICE power between the wheels and the EG. Therefore, the power of the engine responds to the following equations:
where
is the maximum torque the engine can supply at the current angular speed,
, which is a function of the vehicle speed and the transmission ratio coefficients;
is the ICE power amount supplied to the wheels and
is the ICE power amount supplied to the EG (see
Figure 2).
Looking at Equations (
1) and (
2), one can note that the power of the generator, as well as the power of the electric motor can be expressed as a function of
p and
j, as shown in the following:
It is worth underlining that these parameters completely replace the role of the clutches in Equation (
1), having no longer the meaning of a switch equal to 1 or 0 (i.e., open or close), but being rather variable in the range
with a discrete step (i.e.,
and
). In particular, these discretization steps depend on the accuracy required, and a sensitivity analysis was carried out to assess a satisfying trade off between accuracy and computational effort. Nonetheless, this analysis is not presented here, as it is considered outside of the aim of the present paper.
The replacement of the binary values of the clutches with these parameters is the core of the proposed methodology, since it allows for a comprehensive analysis of the powertrain behavior. In particular, the sharing factor of the ICE torque between the wheels and the EG (i.e., p) has a particular importance in terms of average value, since it suggests if the vehicle mostly behaves as a series, parallel or rather combined vehicle and is strongly related to the components physical limits. On the other hand, the average load factor of the ICE (i.e., j) is mainly a result of the efficiency map of the engine.
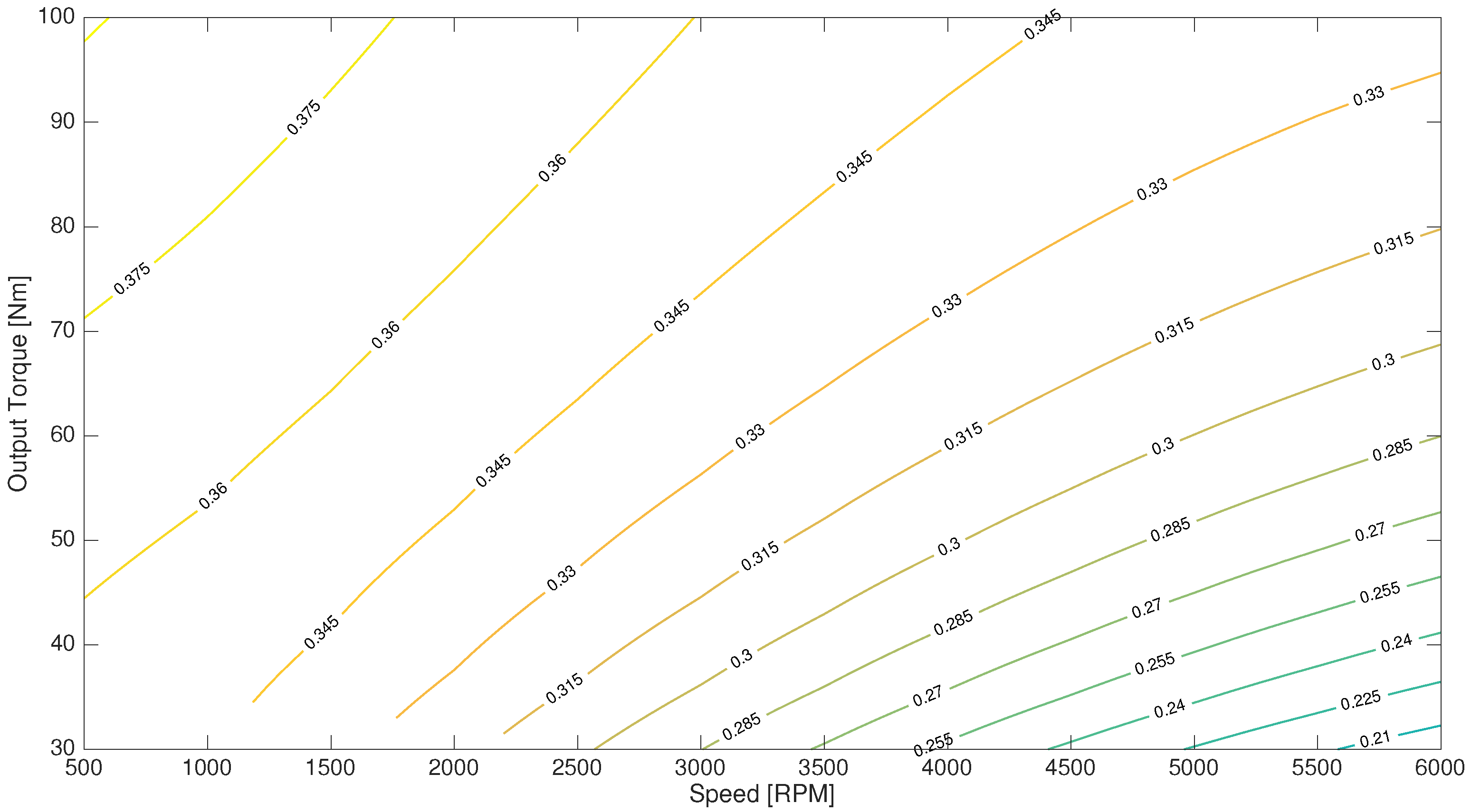
For all of the power converters, map-based scalable models are implemented to allow for an iterative procedure, which can change the size of each device, at each iteration, with a discrete step. To this aim, the implemented maps are dimensionless with respect to the load, and component sizes are a function of the vehicle category. To ensure scalability for all of the propulsion systems, Willan’s line model has been implemented [
25]. This model evaluates the mean effective pressure as an affine function of the mean available pressure, by using coefficients that depend on the mean piston speed. This assumption is based on the property of engines of the same family, produced by the same manufacturer, which are usually characterized by the same correlation between these three variables. Therefore, the operating maps, when expressed as a function of these parameters, appear to be the same, if multiplied by a proper scaling factor, i.e., displacement, piston stroke, number of cylinders, which typically depends on the vehicle category. Despite that this model may appear simplistic, it is usually capable of fitting with acceptable accuracy efficiency maps derived from experimental tests and, most of all, can be used for engines, as well as for electric machines [
26]. Moreover, based on [
27,
28], it was assumed that the efficiency map shape for each component is not affected by the variation in size of the component itself.
With regard to the battery pack, an ad hoc iterative sizing procedure is implemented to evaluate the number of cells needed in series and parallel, as a function of the vehicle category and maximum power of the electric motor. It is worth underlining that the final curb weight of the vehicle is related to the size of the components, which is an affine function of the rated power, and to the number of cells in the battery pack. This is the reason why the component sizing is part of the system definition step.
At the beginning, all of the specifications for a single cell are provided. In this study, lithium polymer cells are considered, since they are promising technologies for HEVs for the trade off they offer between high power and energy density, safety in the typical SoC operating range of an HEV and ease in fabrication [
29]. For each cell, the nominal, maximum and minimum voltage and current are known, as much as the weight and energy capacity.
For the first sizing, the maximum voltage of the battery pack is imposed equal to 400 V, as dictated by the majority of the vehicle electric drive systems (i.e., inverter and motors).
Since the maximum voltage of the single cell,
, is known, the number of cells in series,
, can be evaluated:
On the other hand, the number of strings in parallel,
, is evaluated as the greatest value between
and
:
where
is the lowest number of parallels, which guarantees that the minimum battery power,
, is equal to the rated EM power,
:
with
an average value for the battery efficiency,
minimum cell voltage and
nominal continuous current; while
is the number of strings in parallel, which guarantees a battery energy capacity able to satisfy a certain mission, which demands for an average energy
and is given by:
where
is the nominal capacity of the single cell in
, while
is the above-mentioned desired battery capacity, given by the following equation:
considering an average operating voltage, over the entire mission, equal to the nominal voltage,
, and assuming a maximum variation for the state of charge,
, equal to
, the vehicle being a non-plug-in HEV.
Ultimately, the actual battery energy capacity,
, is given by:
with
as per Equation (
5).
At this point, a second check on the battery power is required in order to decrease the number of cells in series, if possible. In particular, if the nominal power of the battery pack is greater than the rated power of the electric motor,
, multiplied by a certain tolerance factor (i.e., the motor power is incremented by a
), which takes into account losses and inefficiencies,
is decreased, by means of the while-then loop shown in (
10):
Here, 350 V is considered the minimum value for the voltage, imposed by the linkage with the other electric drive systems; is the cell nominal power; and is the total number of cells in the battery pack.
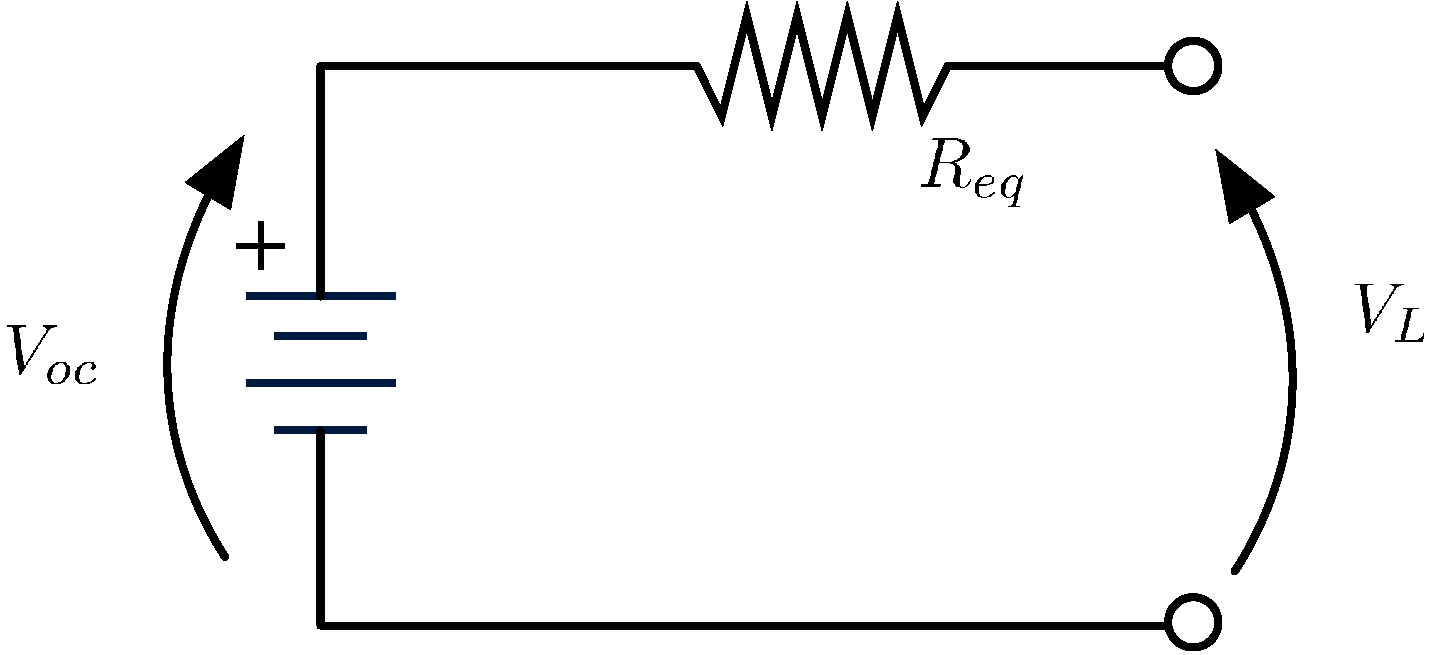
The pack sizing is thus completed, and the dynamics of the state of charge is taken into account by introducing a zero order equivalent circuit model, shown in
Figure 3, where
is the open-circuit voltage source,
represents the equivalent internal resistance,
is the load voltage at the battery terminals and
is the current flow across the battery. LiPo batteries are characterized by an open-circuit voltage with a typical trend illustrated in
Figure 4 [
29]. This parameter is, in general, a function of the battery state of charge (SoC), but one can see that a constant value (dotted grey line,
Figure 4) can well approximate the curve within the typical operating range of the battery, especially for an HEV. The same reasoning can apply to the equivalent resistance, which for this kind of battery has a trend with a horizontal asymptote within the SoC operating range typical of an HEV.
Therefore, the battery voltage output equation, from the Kirchhoff law, is given by:
thus, the battery power results:
and the battery current can be expressed as a function of the battery power,
, by solving Equations (
11) and (
12) for the current:
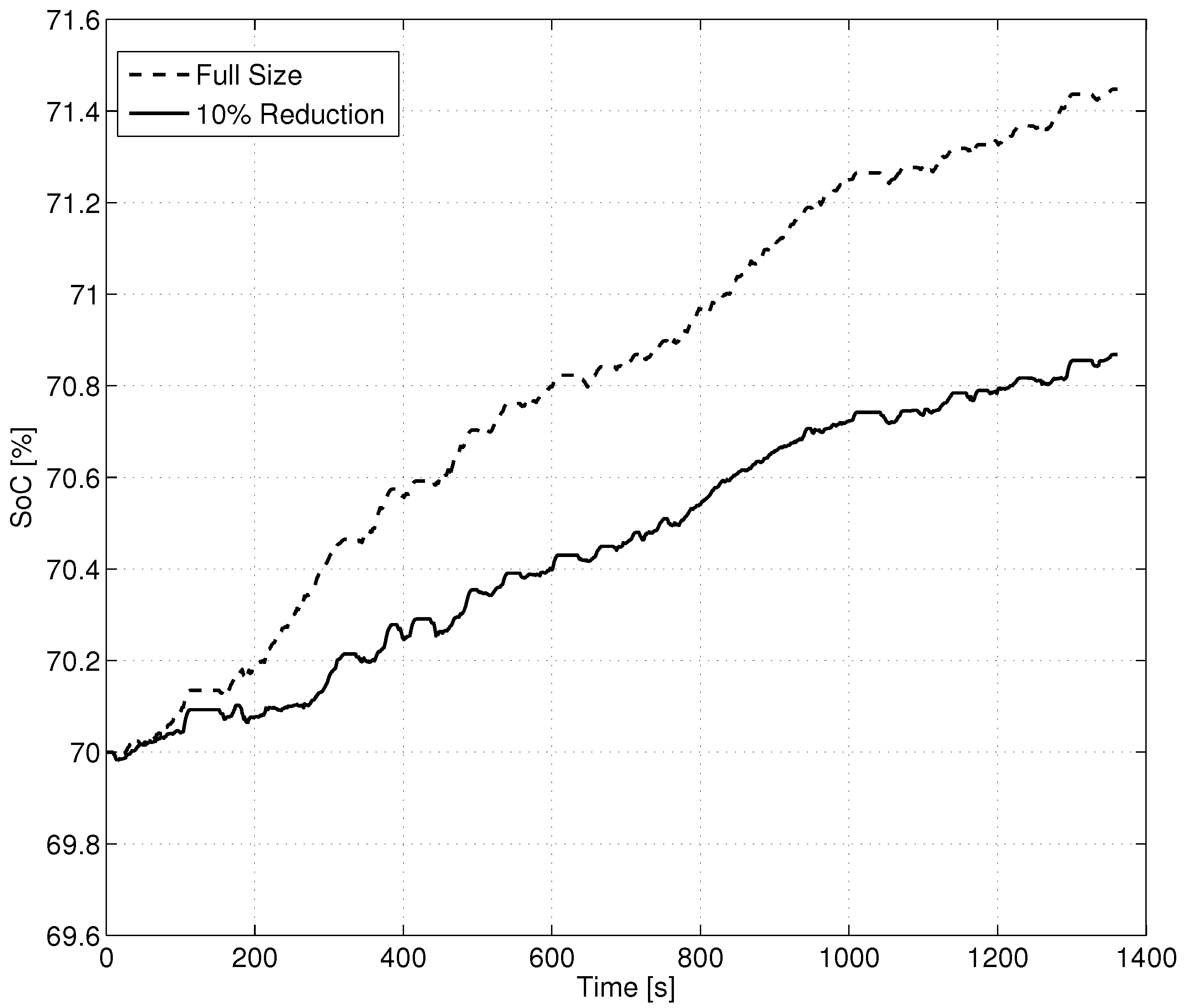
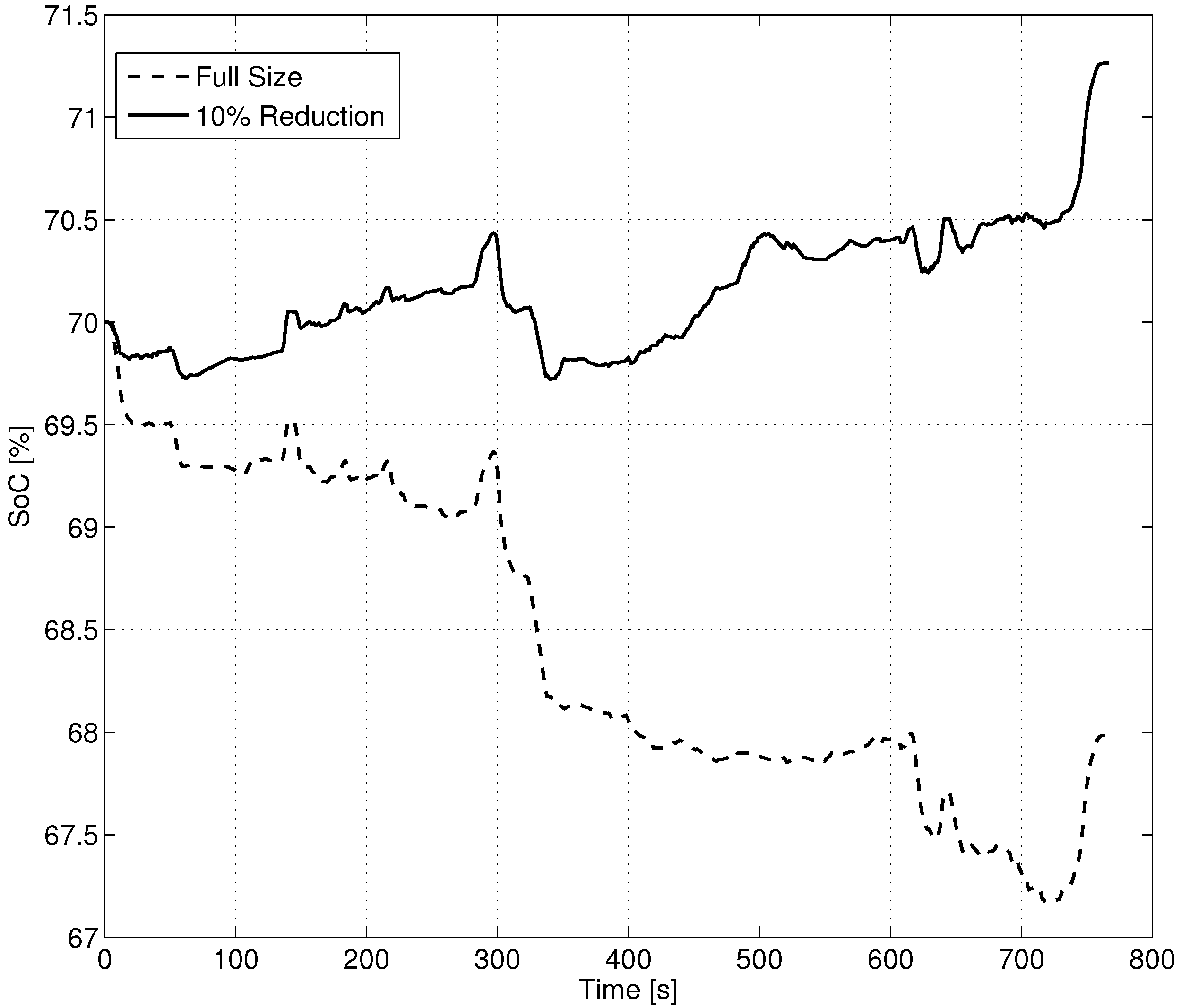
The variation of the battery SoC results as follows:
where
is the battery charge capacity as per Equation (
9).
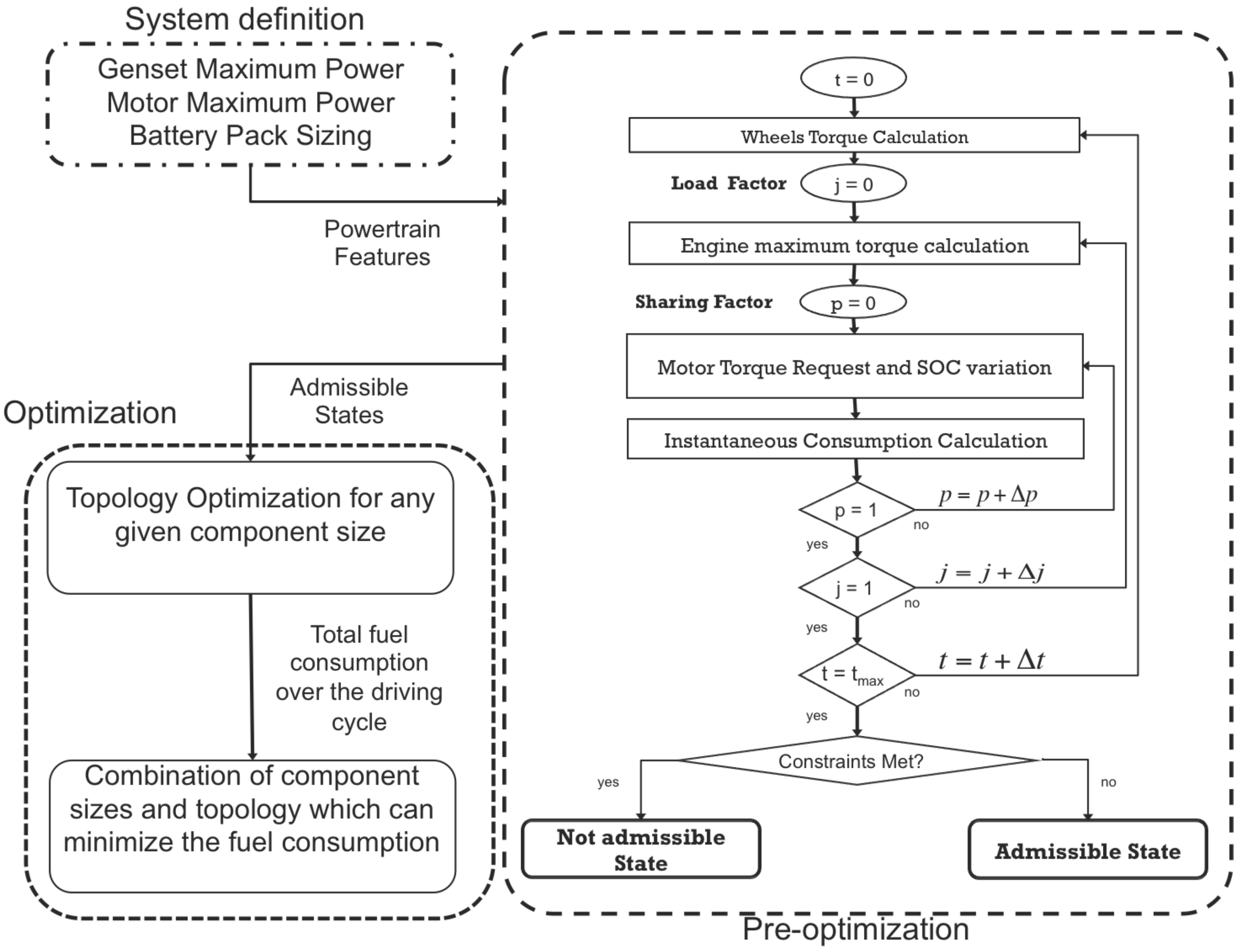
2.2. Pre-Optimization
For each component size, defined in the previous step, a pre-optimization phase follows, which is used to define all of the states that will make up the final graph to be used in the optimization.
First, at every time step, the system physical constraints of the system are calculated, in terms of maximum and minimum available torques for each component at the current vehicle speed; namely at the current shafts’ speeds.
Secondly, the ICE torque request is imposed as a function of the load factor, as given by the first equation in (
2); for each ICE output-shaft torque, the sharing factor splits the ICE torque between the EG and the wheels, as given by the second and the third equations of (
2).
At this point, by using Equation (
3), the corresponding EG and EM powers are calculated.
The variation of the state of charge (
) is finally evaluated by integrating Equation (
14) with considering Equation (
13), where the battery power
results as follows:
with:
The EG efficiency, , as much as the EM efficiency, , can be obtained from the corresponding steady-state efficiency maps.
All of the powertrain components must satisfy the following physical constraints:
where
and
are the minimum and maximum allowable values for the battery power; similarly,
,
,
,
,
and
are the minimum and maximum allowable values for the ICE, EM and EG torques, respectively.
In conclusion, for each time step, by varying both
j and
p, all of the possible torque splits are evaluated thanks to Equations (
2) and (
3), within the system physical constraints, by following the logic shown in
Figure 1. The output of the pre-optimization phase is thus a set of these admissible states.
2.3. Design Optimization
The architecture design optimization is cast into a constrained optimization problem aimed at minimizing the fuel consumed by the vehicle over a given driving cycle while fulfilling the driver’s torque request. Formally, the problem consists of the minimization, over the optimization horizon
, of a cost function,
, which corresponds to the total fuel consumption,
:
To this aim, the cost function is inherited from the well-known Equivalent Consumption Minimization Strategy (ECMS), [
30], and thus,
is given by:
where
is the actual ICE fuel consumption, measured in liters, function of ICE torque, and thus of ICE load factor, and speed,
;
is the equivalent fuel consumption over a given driving event, which can be calculated considering the energy the engine should provide, over the cycle, to produce the net amount of energy supplied by the battery for traction purposes,
, corrected with the fuel lower heating value
, the fuel density
and all of the efficiencies of the efficiency chain:
In Equation (
20),
is a sigmoid-like penalty function, which allows guaranteeing the charge-sustaining mode of operation [
30]. This penalty function can be expressed with the following general form:
where the inflection point is given by
, here set equal to the initial value of the state of charge, and with
defining the curvature. A very high value of this parameter guarantees the achievement of the desired final state of charge, but preventing variations in the SoC that can be instantaneously desirable to further minimize the fuel consumption. It has been observed in [
31] that, for a charge-sustaining HEV, this parameter depends on the driving conditions and the lowest value of
, which guarantees the charge sustainability, is different for each driving cycle. Thus, a trade off is required between robustness and performance. Since what is proposed here is a designing procedure and not the vehicle energy management control strategy, a unique value of this parameter has been chosen that allows for every driving cycle to obtain a final value of the SoC within a maximum variation of 10% with respect to the reference value.
One can immediately note that the combination of Equations (
19) and (
20) represents the so-called ECMS, if one considers as the equivalence factor, [
8], the following expression:
so that Equation (
19) becomes:
Hence, the equivalence factor converts the battery energy into an equivalent fuel consumption that gives a positive contribution when the electric motor is subtracting from the batteries more energy than the energy supplied by the generator (discharge phase) and a negative contribution when both the motor and the generator are charging the battery.
2.3.1. Dijkstra Algorithm
The optimization problem was solved by using the Dijkstra optimal algorithm, which gives the exact optimal solution to a large class of shortest path problems [
32]. This algorithm is strongly inspired by Bellman’s principle of optimality and can be considered a less demanding dynamic programming push-type successive approximation procedure.
In particular, it works by constructing a shortest-path tree from the initial vertex to every other linked vertex in the graph, assigning a value to the vertex equal to the sum of the previous arcs that allows going through the minimum path. Hence, an initial approximation is successively improved (best first), with the means of the functional equation or others related to it. The process ends when no further improvement is possible.
The Dijkstra optimal algorithm is particularly used with graphs in which the edge weights are non-negative, while the Bellman–Ford algorithm should be used otherwise. Nonetheless, the Bellman–Ford algorithm is slower than the Dijkstra algorithm, which results in being effective with a complexity of , with n number of edges. Therefore, the Dijkstra algorithm was the preferred choice, and the issue of negative weights was solved by adding an arbitrary large constant to the obtained weighted graph with negative edges, in order to make all of the the weights become positive.
During the pre-optimization phase, a set of admissible states is identified for every time step. In fact, for each instant of time, the driver’s torque demand can be satisfied thanks to different combinations of
j and
p (i.e., thanks to different power splits and energy paths across the powertrain). Since the following dynamic constraints must be met:
only some of the admissible states of time
t can be reached from at least one of the admissible states of time
. In fact, the set of equations in (
24) controls the variation of torques and battery state of charge from one time step to the next, since the subscripts ICE, EM and EG stand for engine, electric motor and generator, respectively, while
and
stand for minimum and maximum. This way, a number of possible paths is identified, linking the reachable states over the entire optimization horizon, as shown in the example in
Figure 5. The Dijkstra algorithm is then used to find the shortest path between the entire number of paths.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}