1. Introduction
Smart grids are expected to be intelligent, dynamic, secure and flexible [
1]. In this sense, information and communication technology (ICT) plays a vital role in this concept [
2], where a fast and reliable communication infrastructure is critical. With ICTs, power systems will be controlled and monitored, enabling their operators to detect and to react to internal and external grid changes [
3].
Microgrids are small active distribution power systems with their own distributed energy resources (DERs) [
4], loads [
5] and electrical storage units [
6]. They may operate connected to the main grid or islanded from it when necessary, during a fault or disturbance [
7].
In islanded mode, different levels of control have been proposed to describe grid operation [
8]. The primary control is responsible for the natural response of the generators, executed by the droop method. Frequency and voltage are restored at the secondary control. Moreover, the tertiary control is responsible for optimizing the load flow. All these three levels of control are implemented at the microgrid central controller (MGCC).
The MGCC performs the secondary control during the system operation, being responsible for managing all communication between intelligent electronic devices (IEDs), monitoring and controlling the bi-directional flow of data from smart meters, sensors, feeders, actuators, and loads in the whole environment [
9].
The microgrid management actions rely on a robust communication infrastructure [
10], and the dependence increases proportionally to the grid smartness due to the number of connected devices into the microgrid [
11]. These devices need to intercommunicate, exchange data and report the microgrid status instantly to the MGCC to act and react due to any adversity [
12]. Therefore, a flexible communication infrastructure is going to be necessary to support the massive number of connected devices [
13].
Cellular communications systems are a potential candidate to provide the strict requirements for smart microgrid applications [
14]. They are robust, secure, support massive device connection and require low infrastructure investments. The wireless infrastructure is mainly built by three components [
15]: the core network, the access network and the last-mile network. Users communicate with the access network by a wireless link, in particular, base station units to provide connectivity and the access network connects through the core network to provide an Internet connection.
In a wireless access network, a critical issue is the average power consumed to maintain a reliable and robust active network, which has been growing up to 15–20 percent a year [
16]. An enormous amount of power consumption in an access network is associated with the consumption of base stations (BS), which accounts for 60–80% of the total power consumption [
17]. A significant concern is to improve energy efficiency in communication networks [
18] to decrease the impact on system operation.
Much attention has been given to the effect of communication systems in noncritical environments [
19] and urban smart grid environments [
20]. As a way to add more intelligence to the microgrid, the multi-agent system has to be integrated with the distribution network to improve microgrid control during outage operation [
21]. In [
22], the importance of an intelligent distributed autonomous power systems to manage microgrids during lack of energy is shown. However, the work proposed in [
23] presents an alternative design of the previous work, and a fully integrated architecture between all agents in the system to achieve grid intelligence, adding capabilities to the entire system, has been proposed. Nevertheless, just a few investigations have addressed the issue of energy efficient communications in islanded microgrid environments where distributed energy resources work together with batteries to supply the grid for the maximum available time.
Islanded microgrid operation relies on the communication network to interact with the energy management system (EMS), which must be able to control and manage all available power sources and loads. Several energy management systems have been proposed in the literature [
24]. The primary objective of this scheme is to increase the electricity supply time during an outage event. However, little attention has been paid to the communication infrastructure power consumption in microgrid operation.
In [
25], a wireless network infrastructure is integrated with the electrical system. The communication system is properly considered as loads, and the results show the wireless power consumption influence in the microgrid survival time. The difference in the supply time duration for a microgrid with and without taking into account communication load is remarkable. However, in [
25], the entire communication network is considered a priority energy load, always transmitting and receiving data, assuming the power grid as an unlimited source of energy. Thus, it consumes an enormous amount of power. In addition, in [
25], as a way to save BS power consumption, soft sleep modes have been implemented in the microgrid energy management system. The sleep mode is a technique where the BSs can be turned off during periods or put to sleep to reduce power consumption [
26,
27].
However, energy saving schemes are not considered in [
25], and the communication loads are always active, even though, sleep modes consumes less power. In this article, a new approach is proposed aiming to optimize and maximize the microgrid resiliency to achieve maximum energy efficiency. A hybrid methodology has been implemented in the EMS management control. Communications loads are no longer considered a priority load and different sleep mode depths are applied according to the microgrid operation status. During the islanded operation, the whole communication system can be turned off, or, just a few base station devices can be deactivated, decreasing energy consumption and achieving maximum energy efficiency.
Nevertheless, the network deactivation will affect the communication system reliability [
28]. Reliability is related to the system latency, which is considered the ability to react to a system change quickly. For instance, if the communication system is completely turned off and an unexpected outage event occurs, the EMS decision will take longer to be executed due to high latency. It will take some time to activate the communication system and take the desired action, increasing the reaction time, and consequently increasing latency and decreasing system reliability. This compromised solution establishes a trade-off between maximum energy consumption, system reliability, and smart applications availability.
To further investigate the impact of turning off BS devices, a continuous-time Markov chain (CTMC) model analyzes the microgrid communication network reliability between changes in the microgrid operation status. In addition, an adapted model of the IEEE 34 bus node is used to model the problem and to access the performance of the proposed solution.
The paper is organized as follows.
Section 2 presents the critical communications issues in microgrids. In
Section 3, the energy management system under communication constraints is presented.
Section 4 discusses the trade-off between communication power consumption and reliability in islanded microgrid. In
Section 5, the proposed methodology is presented, simulated and validated. Finally,
Section 6 discusses the conclusions.
2. Critical Communications Issues In Microgrids
The design of a communication network is a critical and crucial part of a smarter grid. There is a need for an adaptive, intelligent, robust and future-proof architecture, where the network can autonomously react and take actions without human intervention [
29].
A wireless network infrastructure is distinguished by different domains [
30], mainly due to its geographical size and functionality. The primary objective of each field is to support strict requirements and provide connectivity to the entire network [
31]. The microgrid environment is characterized by two main domains, mainly due to geographical size and data rate, which are the home area network (HAN), which supports the communication area between last-mile users and their appliances, and the neighborhood area network (NAN). This layer is responsible for controlling and monitoring the DERs’ power production, energy storage systems (ESSs) and their interconnection with the sub stations, monitoring and controlling the whole microgrid area.
The flow of information between these domains is modeled in a centralized manner [
32]. In a centralized manner, the MGCC receives data from all connected devices and takes action. Therefore, each domain has to maintain strict requirements as latency, reliability, and availability. In islanded applications, besides power consumption, which affects the microgrid survival time, latency is also essential. Latency is the time interval between an action and reaction of some event.
Table 1 exemplifies all main communication features and latency requirements for microgrid operation [
33,
34].
Besides all these requirements, a communication infrastructure must obey aspects as availability, robustness, flexibility, security and a little infrastructure cost. Several known technologies have been investigated for this purpose [
35].
However, wireless communication seems to be a more appropriated candidate for microgrid environments. They are robust, flexible, reliable and require low infrastructure investment [
36]. In addition, actual wireless communications standards aim to suppress the imposed communication requirements for machine type communications (MTC) [
37]. Thus, Long Term Evolution (LTE) technology [
38] will provide higher coverage, support low latency applications, and support a massive number of devices and scalability for different smart communications applications scenarios. Therefore, this is the communication technology considered for this research.
2.1. Wireless Access Network Power Consumption
As BS consumption is the highest in the wireless access network, its influence on energy expenditure needs to be evaluated. The BS architecture consists of two main use parts: load and non-load dependent [
39]. Load dependent devices consume around 60% of the total power consumption [
40], and its consumption varies depending on the network traffic load. The traffic load changes over time, representing the number of active users in a defined period. Devices such as the digital signal processor (DSP), the transceiver (BB) and power amplifier (PA) are load dependent; only the PA consumes about 30% of the energy. Non-load dependent devices consume 40% of the total energy consumption, and its devices are standard for all sectors. The air conditioner (AIR) is the highest consumer in non-load dependent devices, consuming around 25% of the total power, followed by the rectifier (RECT) and the backhaul link, which are independent of the number of users [
41]. The total power consumption of a base station is proposed in [
39] and is written as:
where
is the total BS power consumption,
and
are, respectively, the non-load dependent and load dependent parts from the BS and
is the load factor.
As a way to measure the impact of energy consumption on a geographical area, the energy efficiency factor evaluates the total power consumption per square kilometer [
42]. The energy efficiency
in
, is written as
where
m is the number of available base stations and
A is the total area in km
.
3. Energy Management System in Islanded Microgrids under Communication Constraints
Real-time communication supports grid smartness, but with high energy consumption. In islanded conditions, this situation may be trouble since the energy availability is time limited. To ensure the maximum supply time, the hybrid energy management system defines a rank of priority loads connected to the system. The loads are classified according to the supply voltage, and also according to economic and social criteria. The rank is composed by residential, rural, commercial and essential loads.
The highest grade load is the essential one, which includes survival services. When absent, it may bring danger to the health and safety of people. However, different from the previous approach [
24,
25], the telecommunications loads are no longer considered a priority rank load, as the EMS adjust the need of communications load according to the grid operation status. The load classification is determined according to the Brazilian Electrical Energy Regulatory Agency and
Table 2 illustrates each operating mode.
The work conducted here deals with the adjust of communication network load according to different microgrid operation modes, determined by the current load, energy stored, and environmental conditions. Three different operation modes are proposed: normal, emergency and critical. Each of these operating modes has a list of predefined actions.
In normal conditions, the microgrid is supplied by the main grid and the distributed energy resources. The MGCC receives and gathers all necessary information to evaluate the system’s balance. During any fault or an outage, the microgrid is disconnected and supply loads using its distributed resources.
Operating in islanded manner requires strict needs to ensure power availability for a longer time. The grid’s primary goal is to supply the essential services for as long as possible. Thus, the EMS must consider maximizing the amount of provided customers during a minimum period, considering mainly the highest priority loads to ensure safer balancing conditions and lower frequency variations.
Since it is not possible to determine the duration of the grid unavailability in the islanded operation, it is of paramount importance to supply the high-rank loads for the longest available time. This goal may be accomplished applying the energy management approach to maximize the time of power supply with the least possible cost while meeting the priority classes. The EMS determines the best grid operation mode according to the information gathered from the system and organized into different control variables used for decision-making. These operation modes have predefined schedule actions including load shedding of lower and medium priority customers and demand response steps to assure the best timing operation. The proposed hybrid method approach for application in microgrid’s islanded operation is described in the next sections.
3.1. Energy Hybrid Method with Different Sleep Modes Depths
Sleep modes were proposed as a technology to achieve energy efficient consumption in wireless access networks [
27]. For the improvement and optimization of the grid operation time, new savings policies are developed in this research to achieve a better overall performance.
The proposed modifications refer to the communication load aiming to optimize and maximize the efficient energy operation. The communication network, considered before as a priority load, now assumes different status according to the microgrid state operation. Instead of being active all the time, the MGCC controls grid operation sending its information to the EMS, and it automatically activates or deactivates the communication network when necessary. These controls rules are based on sleep mode techniques. Different deepness policies are considered here to optimize the BS power consumption and improve microgrid operation. These policies are implemented in the EMS and are summarized in
Table 3.
Table 3 shows how the EMS control takes its action. An example of the manager control can be described as: if the controller enters the emergency mode, low priority loads are switched off, and the communication network in charge for that group is deactivated. While in medium priority groups, the BSs are forced to enter in long sleep mode and high priority groups in soft sleep mode.
In soft sleep mode, the base station power amplifier turns off, and in long sleep mode, most devices are completely turned off, such as the power amplifier, air cooling, signal processing, and baseband processing, with only a few devices remaining turned on for network synchronization. In the deactivated mode, the whole base station is turned off. The off time periods will impact the communication system performance affecting the microgrid reliability; for this sake, the grid reliability is evaluated.
Table 4 illustrates the sleep mode deepness features.
In
Table 4, variables like wake-up time, affected functionalities, and latency trade-off are described for each sleep mode deepness. Analyzing
Table 4, the trade-off between applying different sleep modes deepness and the impact in communication applications is evident. For instance, using a soft sleep mode into BS affects low latency applications, e.g. protection systems, as the BS wake up time is longer than the time to take the protection action.
4. The Influence of Power Consumption on Communication Reliability in Islanded Microgrids
Due to the control modifications, microgrid energy resiliency will increase, but with a high cost. Power consumption is directly proportional to communication network availability. Greater availability means a quick response to an outage event.
Availability, for its turn, is related to latency and reliability, since a more reliable environment is the one that quickly senses, acts and reacts due to changes. A low latency requirement of a given communication application demands higher reliability from the network. Therefore, long latency tasks require less from the communication system, assuming less power consumption and lower reliability.
In islanded operation conditions, electrical energy consumption is a critical variable and energy has limited availability. Therefore, more power is necessary to maintain all distributed BSs active during microgrid operation to support smart communication applications, since all IED devices are continuously transmitting and receiving data.
Furthermore, a trade-off is established between grid resiliency and communication reliability. If the MGCC system manager aims to maximize the survival time from an islanded microgrid, some saving actions must be taken, and loads must be shed according to the microgrid’s operational state, as shown in
Table 3.
Due to the lack of available energy during critical situations, the communication network that serves low and medium priority loads are shed. Therefore, to ensure that the communication system still maintains certain connectivity for critical loads, the EMS set the base stations’ units to long sleep modes, which guarantees certain communication capability.
In addition, when the available energy is very low during critical situations, the EMS disables all of the communication functionalities to extend the supply of critical loads, which decreases grid smartness and affects smart operation features. The affected functionalities due to sleep mode deepness for each case are:
Soft Sleep Mode:
- -
Wide-Area Situational Awareness,
- -
Transmission Line Monitoring,
- -
Synchrophasor,
- -
Outage Management,
- -
Fault Location, Isolation, and Restoration for Distribution Grids.
Long Sleep Mode. Besides the functionalities listed above, the following features are lost:
- -
Distribution Management,
- -
Advanced metering infrastructure (AMI),
- -
Substation Automation,
- -
In-Home Communications,
- -
Meter Reads.
- -
Demand Response.
OFF mode. This mode forces the deactivation of the BS:
- -
All smart applications functionalities are lost.
Since all features are affected, it is necessary to evaluate the trade-off impact between energy efficiency and grid smartness by the reliability analysis.
4.1. Microgrid Communications Reliability
Reliability in a communication system is the concept used to describe if a system is behaving properly without failures for a given period [
43]. Controls’ rules are made to decrease BS power consumption by deactivating some devices. The deactivation impacts the BS awake time causing damages to microgrid operation. To evaluate the grid reliability behavior, the BS turned off time is considered a failure. Thus, the microgrid communication network operation can be modeled as a continuous-time Markov chain (CTMC) [
44].
A CTMC is a stochastic process, which says that, for any given system, given the present state
n and its future state
, the probability of being in state
k at the time
, with transition rates
between states
and
k, is written as in [
43]:
Though, if
, Equation (
3), is rewritten as
This reliability analysis assumes an independent rate of failures () since the number of states is finite, and the transition probability follows a Poisson distribution, with finite space . Each space denotes the communication load operating status at time t. The first state means that all communication network is active since there are enough sources of energy to supply the system. In , the EMS control changes to soft sleep mode and in changes to long sleep mode. The state is the most catastrophic event where no communication is available, and base stations’ units are turned off.
Following this approach, the transition rates between states during the microgrid operation are written as:
: in normal operation state to enter soft sleep mode to state ;
: from soft sleep mode to long sleep mode to ;
: long sleep mode to completely turning BS off to
It is intuitive seen that, as the energy stored decreases over time, the communication network also decreases its reliability. For simplicity, it is assumed that only one failure can occur during the transition between states. Therefore, considering
S states, the transition rates
,
,
,
and the row vector
; from Equation (
4) the Markov equations are written as:
Assuming initial conditions as
;
,
, then, Equations (
5)–(
8) can be solved analytically using the Laplace transform, where
. Therefore, each state transition probability is rewritten as
Then, assuming initial conditions and multiplying by Equations (
9)–(
12), it is possible to find the transition state probabilities in function of
t; however, taking the inverse Laplace transform of (
9)–(
12), the transition state probabilities are written as:
The communications system will remain in operation as long as it stays in states
,
and
. The system becomes unavailable when it reaches state
. Therefore, the reliability of the network over time is dictated by the reliability functions, which describe the role of each operational state:
Simulations will be presented in the next section to investigate the feasibility of the proposed method and its application to an islanded microgrid scenario.
5. Performance Evaluation
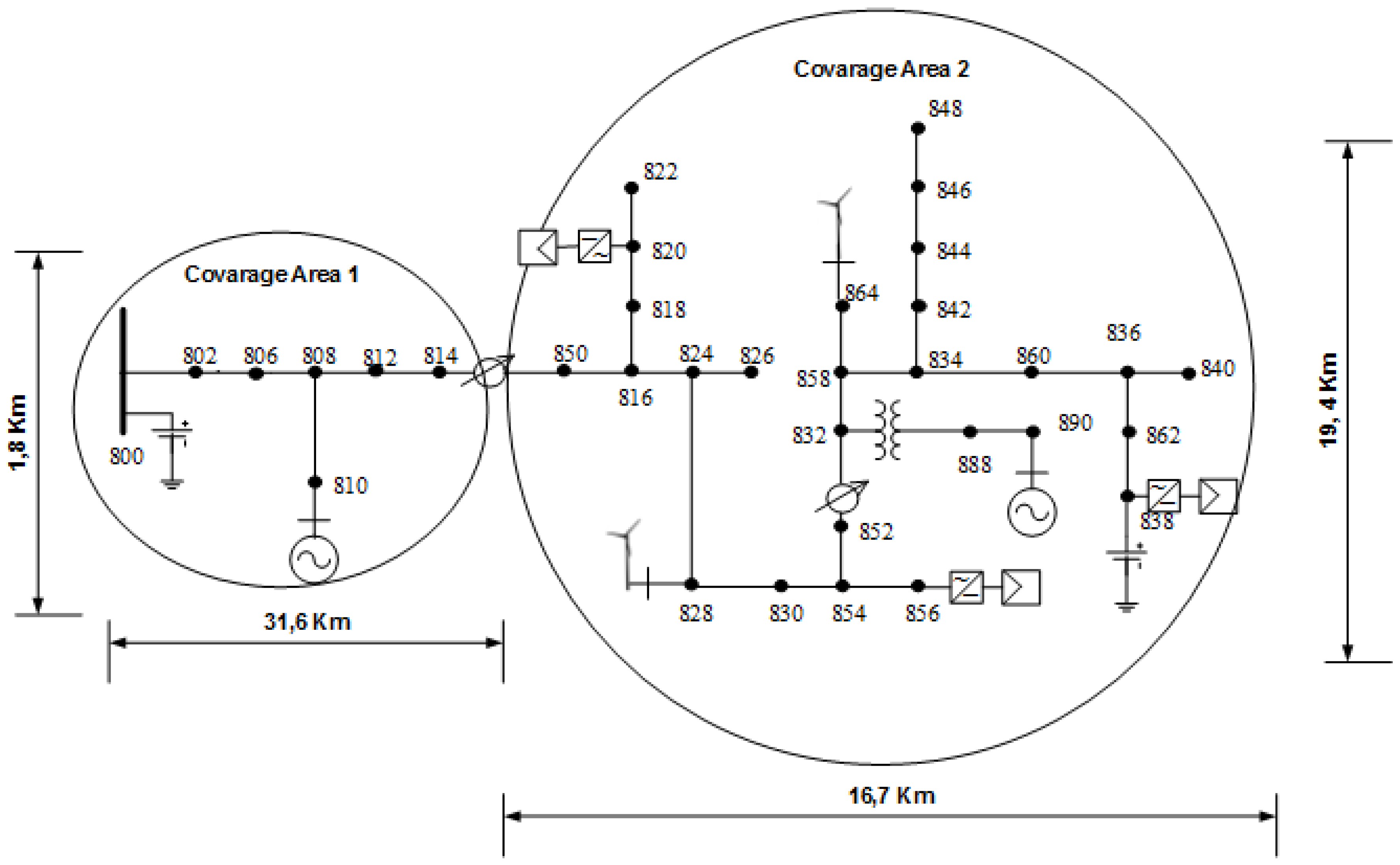
The implemented scenario is tested in a modified IEEE 34 node system model with distributed energy sources.
Figure 1 illustrates the proposed microgrid scenario. The highest priority customers are located at Buses 802, 822, 830, 840, 860 and 890. A communication network covers all the geographical area of the IEEE 34 bus system. The network is designed and implemented with LTE technology and, as a way to ensure a reliable microgrid operation, the communication loads are connected to the system together with the other system loads in their equivalent buses. The EMS adapts the communication power consumption according to the operational state of the microgrid. In this way, during the operation of the system, it is guaranteed minimum connectivity even though severe saving actions have been taken.
Table 5 lists the values of the DERs, which supply the system, and the capacity of each energy storage system (ESS).
Due to the large geographical area in the modified IEEE (Institute of Electrical and Electronics Engineers) 34 node system, the system is divided into two regions because of the system characteristics. The real geographical conditions, with one being a low-density rural area and the other a high-density urban area in the system, made this division feasible. In the application carried out here, it was interesting, since the two regions considered present different characteristics, enabling us to test the potentiality of the proposed methodology.
The microgrid is disconnected from the main grid at 10 a.m. due to any event or failure, the breaker at feeder 800 will open, and DERs are going to supply the system.
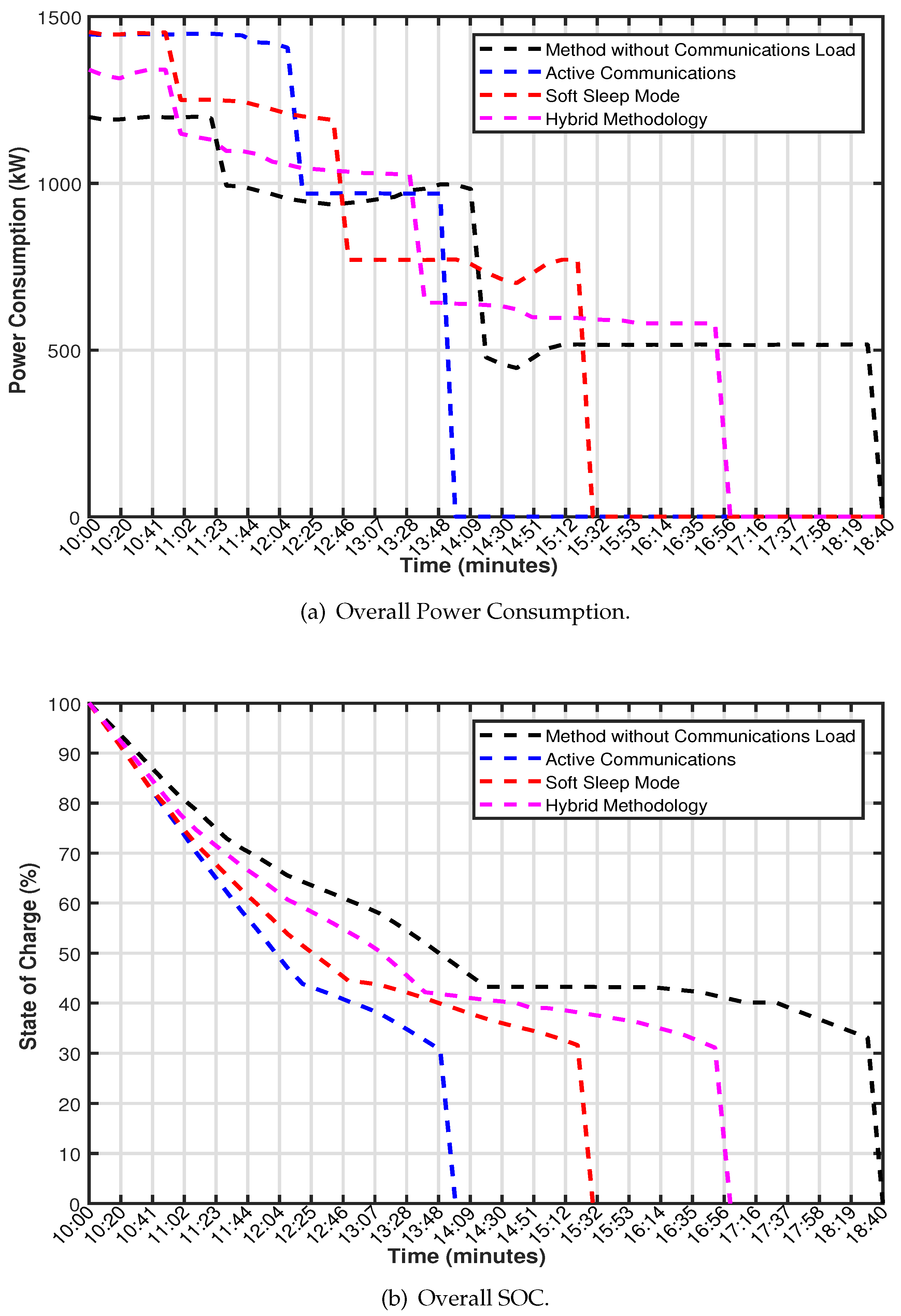
Figure 2a shows the power consumption over time obtained using both the previous methodologies and the hybrid method proposed in this study. The comparison of the results helps to understand the effect of considering the communications’ energy consumption in an islanded operation scenario. In [
24], the EMS is developed without regard to the communication network as a proper load. Therefore, its results (see dotted black line) are incomplete, and any comparison with the proposed methodology is unfair since the system is less loaded.
However, comparing both results in
Figure 2a, with a full active wireless system and without considering it (see dotted black line and dotted blue line), the influence of telecommunications energy consumption is remarkable in the grid’s survival time. Communications power consumption dramatically harsh the system and its impact cannot be discarded to ensure a real-time operating system.
The method reported in [
25] considers the communication network as a proper load. The vast amount of communication load are calculated from Equation (
1) and considered a high rank load. This approach is not efficient, as the network is going to be continuously available for the whole area, even though only a small area needs connectivity.
In addition, in [
25], the same case is investigated considering the application of soft sleep mode. The power amplifiers are turned off during most of the time. This fact produces a distinct improvement on the maximum available time to supply the loads (compare dotted blue line with dotted red line), the microgrid is provided for 90 min more with soft sleep modes, since the PA consumes an enormous amount of energy in a base station unit.
However, both simulated scenarios have a low energy efficiency and a new approach to optimize microgrid operation is proposed. The hybrid methodology automatically adapts the communication network load due to grid operation status and load shedding (see dotted magenta line). The communication is no longer considered a priority load, as shown in
Table 2, and, now, it fits the grid needs to achieve maximum energy efficiency.
As a way to achieve maximum energy efficiency, the proposed hybrid method assumes four different stages for the communication load. After the disturbance at Bus 800, as shown in
Figure 2b, the EMS changes its status to normal operation mode and the communication network, which supports medium priority loads enters in soft sleep mode, and the communication load from low priority loads enters in long sleep modes. At 11:00 a.m., the EMS changes the grid operation status to emergency mode, shedding low priority loads and the fossil-based sources are turned on continuously to increase the power generation.
The hybrid methodology increases the microgrid survivals time in 190 min compared with the full active systems method (compare the dotted magenta line with dotted blue line) and almost 110 min compared with the sleep modes implementation (see the dotted red line and dotted magenta line).
The EMS manage control adapts its operation due to system changes, taking action to save more energy. The proposed hybrid technique evaluates the new demand management conditions described in
Table 3 and
Table 4.
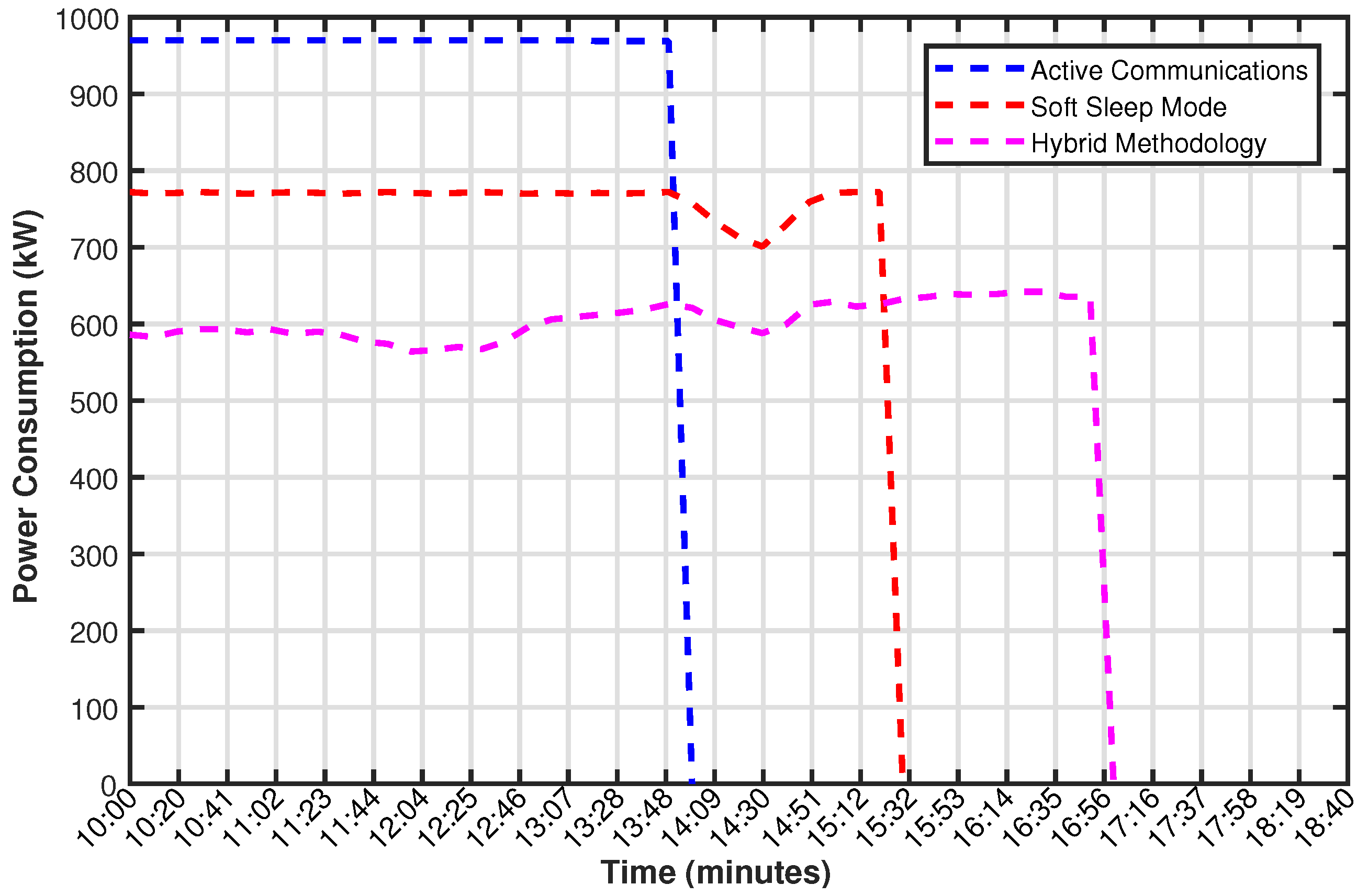
Figure 3 shows the power consumption of highest priority customers of each simulated scenario. The results show an improvement in the overall performance of the hybrid system compared to the one with active communications. The system adaptation due to changes in the operation status increases the overall energy supply availability.
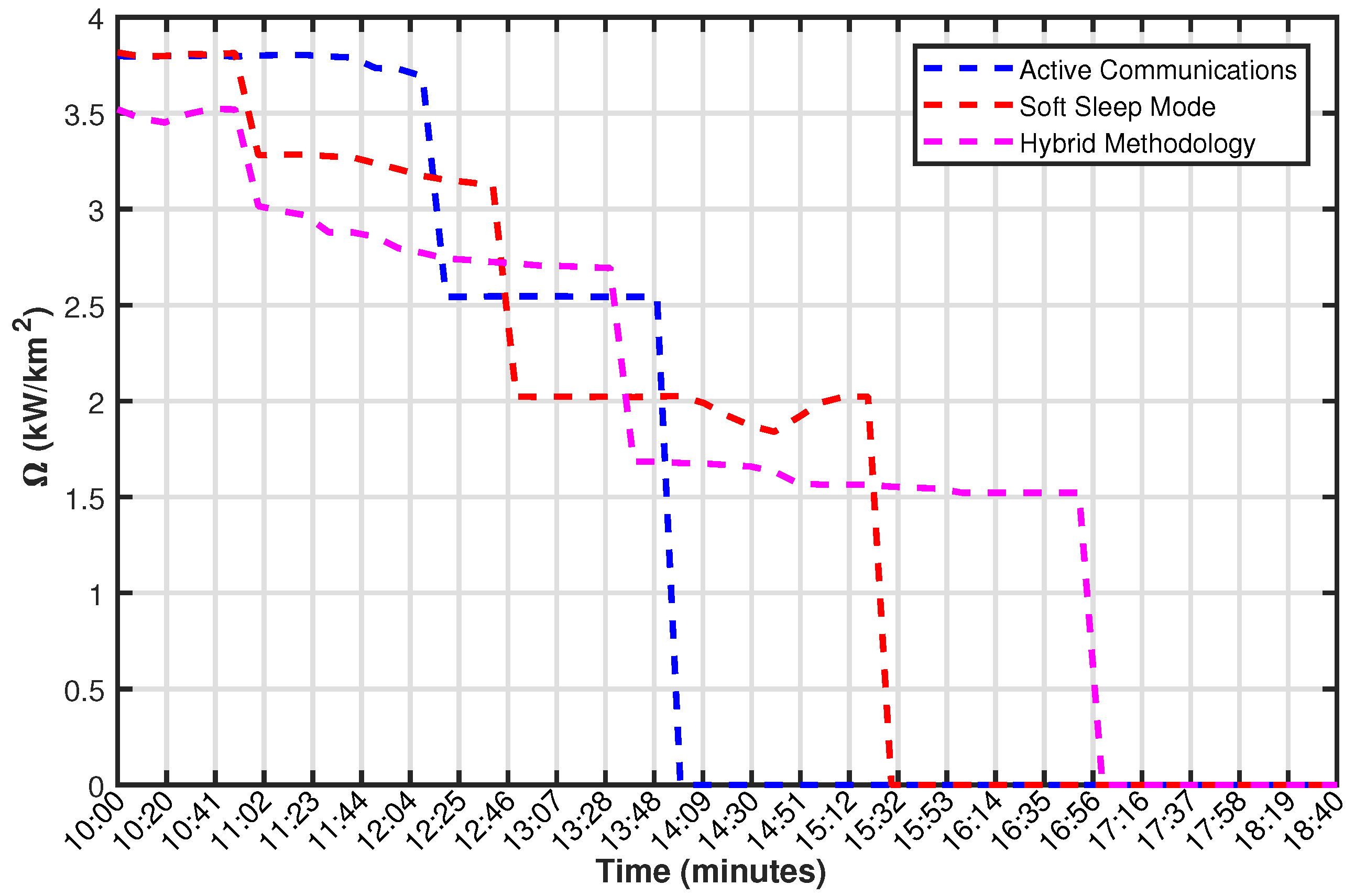
As a way to exemplify the hybrid methodology efficiency, the power consumption per square meter for each simulated scenario is calculated from Equation (
2).
Figure 4 shows the consumed energy over the testbed scenario. A better energy efficiency is achieved with the hybrid methodology, which means less power consumption per square kilometer. This goal is only possible due to the EMS control management, which adapts accordingly microgrid operation status changes for most of the time. The proposed method has, in general, a good efficiency and provides more grid autonomy compared with the other methodologies.
As a way to establish a reliable communication link, the system reliability must be high and the communication link always active. However, due to intermittent sources of energy, the system must shed loads to achieve greater resiliency. Thus, with lack of power and the shutdown of some base stations’ devices, the communication network becomes less reliable, losing communication skills.
At 1:45 p.m., the EMS changes its operation status from emergency to critical mode operation. At this moment, the low and medium priority customers are shed, as their communication network. Thus, if any disturbance happens in any given period, there is a need to wait for the BS to wake up and take the proper actions. According to
Table 3, the communication system will not be able to perform activities related to particular smart applications, due to the incompatibility of the response time and the wake up time. At this point, the trade-off between energy efficiency and intelligent microgrid applications becomes evident.
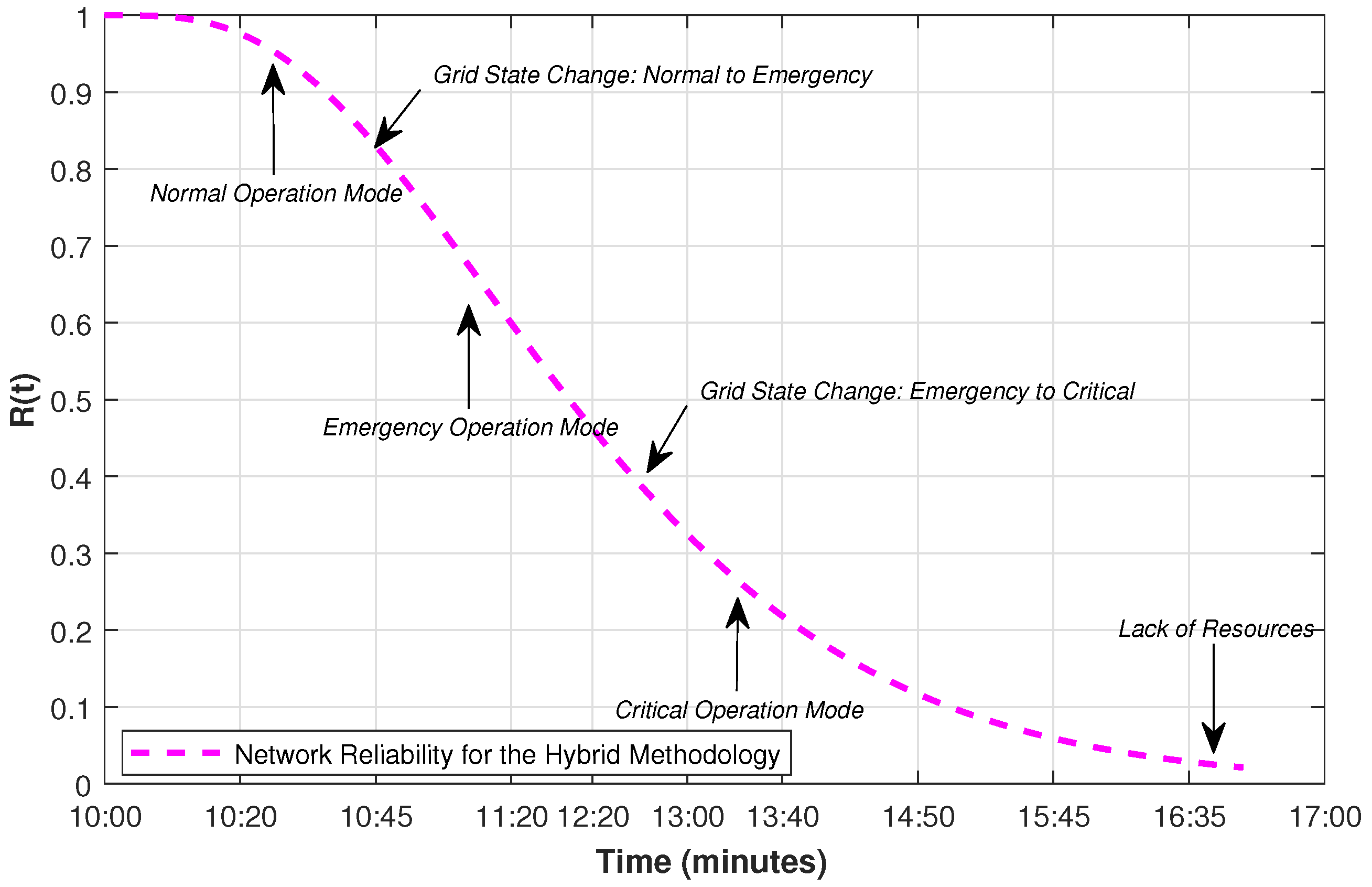
From
Figure 5, the system reliability can be observed at each operation mode over time. The loss in the system reliability is evident due to the energy saving actions taken by the EMS control, in order to optimize and maximize the supply time. At critical operation mode, the grid has the lower reliability, and it will be not able to perform low and medium latency applications. At this point, the EMS still supplies high priority loads, such as health services and transportation facilities. The base station units are set to long sleep mode to ensure critical microgrid operational requirements and to maximize the supply of critical loads. Therefore, this is the price to pay to extend the operation of the microgrid in islanded mode.
6. Conclusions
This paper has investigated the improvement and optimization of power consumption in an isolated, autonomous microgrid scenario. A wireless access network for real-time communication has been presented. The power consumption evaluated shows a significant influence on system performance with limited energy resources.
The proposed method focuses on the communications side and is a new scheme for energy efficient communications in critical environments, where energy is a key variable and must be controlled as it vanishes over time. The deployment of sleep modes into telecommunications load during the state changes of a microgrid operation shows an effective way to optimize the microgrid survival time, saving energy during idle periods and improving the batteries resources along time.
The results indicate a power consumption reduction, but such reduction causes a trade-off scenario in microgrid operations. However, this compromise solution is compensated by the maximization of the survival time in critical mission scenarios.
A trade-off between energy efficiency and communications requirements takes place when the EMS needs to take actions to optimize the system performance. It influences the system reliability and applications requests. Results show an improvement in system performance, and the loads are supplied for the longest time possible with an acceptable energy efficiency and communications robustness, but with losses in system reliability. This approach can be used in any critical scenario with the lack of resources and need to be smart.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}